

Abstract
The authors investigated how different levels of detail (LODs) of a virtual throwing action can influence a handball goalkeeper’s motor response. Goalkeepers attempted to stop a virtual ball emanating from five different graphical LODs of the same virtual throwing action. The five levels of detail were: a textured reference level (L0), a non-textured level (L1), a wire-frame level (L2), a point-light-display (PLD) representation (L3) and a PLD level with reduced ball size (L4). For each motor response made by the goalkeeper we measured and analyzed the time to respond (TTR), the percentage of successful motor responses, the distance between the ball and the closest limb (when the stopping motion was incorrect) and the kinematics of the motion. Results showed that TTR, percentage of successful motor responses and distance with the closest limb were not significantly different for any of the five different graphical LODs. However the kinematics of the motion revealed that the trajectory of the stopping limb was significantly different when comparing the L1 and L3 levels, and when comparing the L1 and L4 levels. These differences in the control of the goalkeeper’s actions suggests that the different level of information available in the PLD representations (L3 and L4) are causing the goalkeeper to adopt different motor strategies to control the approach of their limb to stop the ball.
Key points.
Virtual reality technology can be used to analyze sport performance because it enables standardization and reproduction of sport situations.
Defining a minimal graphical level of detail of a virtual action could decrease the real time calculation of a virtual reality system.
A Point Light Display graphical representation of a virtual throwing motion seems to influence the regulation of action of real handball goalkeepers.
Key words: Virtual reality, level of detail, time to respond, motor response
Introduction
Virtual reality is now being used as a tool to analyze and understand performance in sport (Bideau et al., 2009). This promising technology has a number of advantages over video presentation or real-game situations. Firstly all factors can be controlled and manipulated in a systematic manner, ensuring reproducibility between trials (Tarr and Warren, 2002). Secondly the effects of these modifications on resulting behaviour can be monitored in real-time. Thirdly the immersion of the subject in the virtual scene in an egocentric position allows the optical information gleaned from the virtual world to correspond directly to what the participant would see in a real sporting situation (Cutting, 1997). And finally, the participant’s perception of the scene is stereoscopic which has previously been highlighted as an important factor when performing interceptive tasks (Mazyn et al., 2004). Given these advantages of virtual reality over video, this technology has been exploited to analyze and understand players’ performance in different sports such as soccer (Craig et al., 2006), handball (Vignais et al., 2009; Bideau et al., 2004) and rugby (Brault et al., 2009). Moreover this technology can be employed to test team sport strategies (Metoyer and Hodgins, 2000) or to train athletes in a simulator (Kelly and Hubbard, 2000).
In all these kinds of studies, the aim has been to design and create an experience of being in a place or witnessing an event that is away from the natural physical setting. This being the case one important question that always needs to be answered is the level of the subjective feeling of “being there”. This phenomenon is known as the level of presence (Sanchez- Vives and Slater, 2005) and it is an indicator of the quality of the simulation. In a virtual sporting scenario the level of presence can be deemed sufficient if there is a certain level of behavioral realism, where the participant reacts in the virtual world as they do in the real world (Zahorik and Jenison, 1998). Consequently by quantifying this level of presence or behavioral realism provides a means of validating the technology as a useful tool for studying motor behavior and perception in sport. In this regard, Bideau and colleagues developed a virtual training simulator for handball goalkeepers (Bideau et al., 2004). In handball game, two teams of seven players each pass and bounce a ball trying to throw it in the goal of the opposing team defended by the goalkeeper. Bideau and colleagues have shown a similarity between goalkeepers’ responses when intercepting a ball thrown either by a virtual handball opponent or a real one, which provided evidence of behavioral realism (Bideau et al., 2003; Kulpa, et al., 2005). Thus, in this example of handball goalkeeping the results suggest that the level of presence was sufficient.
These findings prompt the next question which concerns the factors that could affect behavioral realism. For example, it has been shown that the phenomenon of presence partly depends on the graphical quality of the display (Barfield et al., 1995). This remark suggests that in a sporting duel such as an attacker versus goalkeeper in handball, the phenomenon of presence can be influenced by the graphical level of detail (LOD) of the throwing movement. In terms of the handball example the graphical LOD of the synthetic humanoids and objects used in these studies must be a determining factor in the quality of the virtual situation. In fact a virtual animation (humanoid and ball) represented with meshes of high degree polygons (generally triangles) could increase the real time calculation of the virtual reality system (Doncescu and Puzenat, 2000). In addition, meshes used must be fitted to the skeleton of the elements (humanoid and object) in order to obtain a realistic deformation during the animation (Kulpa et al., 2005). Those hardware considerations coupled with the necessity of a high level of presence in the virtual environment, question the possibility of determining if a lower level of graphical detail can induce a sufficient level of presence. More specifically using the Bideau and colleagues (2004) framework, it would be relevant to determine the threshold of graphical representation of the thrower which would induce a sufficient level of behavioral presence in the goalkeeper’s response.
Perception of lower graphical detail of an action has already been studied in two- dimensional (2D) environments. In 1973 Johansson demonstrated that humans have the ability to accurately identify actions with limited visual information (Johansson, 1973). In these landmark experiments observers saw only points of light attached to strategic body parts of an actor’s body when they were performing an action. The results from these experiments have shown that in spite of the impoverished visual information, human observers were still able to accurately identify the action that was performing (Dittrich et al., 1996; Kozlowski and Cutting, 1997). In other words this type of display still preserves the relative motion between limb segments, visual information that is sufficient to identify the action being performed. This innate ability to determine the action someone is performing from the relative motion of points of light is termed biological motion whilst the method of attaching points of light to key anatomical landmarks is called point light displays (PLDs).
In sport it has also been demonstrated that biological motion picked up from an PLD situation play an important role in anticipation (Williams and Elliot, 1999). For example, the PLD method has been used in different activities such as squash (Abernethy et al., 2001) and tennis (Shim et al., 2005) in order to evaluate differences in perceptual anticipation between novices and experts. These kinds of studies have shown that players are able to extract movement information equally well from both video playback and PLDs (Shim et al., 2006; Ward et al., 2002). In computer animation, Hodgins and colleagues (1998) have also demonstrated that the perception of motion is influenced by the geometric model (polygonal or stick) used for rendering (Hodgins et al., 1998). However all these studies were carried out without immersing the participant in the scene and by using 2D displays without taking into account depth related visual information (Slater et al., 1996). In other words these factors may be considered as real limitations for a pertinent perceptual analysis.
This study will use virtual reality as a mean of studying the minimal level of detail required to create a sufficient level of behavioral realism for handball goalkeepers. To intercept a ball, handball goalkeeper needs to anticipate ball trajectory and to have a precise control of his motor response. Therefore the goal of our study is to evaluate the influence of the graphic levels of detail (LOD) on the goalkeeper’s performance. The latter is characterized by evaluating the time to respond, percentage of successful responses, the accuracy of the movement and the kinematic pattern of the motor response. At last, all these parameters will allow defining the minimum LOD needed to have a sufficient degree of presence for handball goalkeepers.
Methods
Participants
Ten handball goalkeepers (playing in the top national handball league in France) gave their informed consent before participating in the experiment. Mean age of the participants was 23.5 years (± 4.5 years), mean height was 1.86m (± 0.07m) and mean weight was 85.3kg (± 12.2kg). All subjects had normal vision.
Virtual motion animation
Real handball throwing actions were necessary to animate the virtual character and ball in the virtual environment. Throwing movements of top national level handball players were recorded using a VICON motion capture system (Oxford Metrics, Oxford, UK). The participant and ball movements were captured at 200Hz using twelve infrared cameras. Thirty six reflective markers were attached to the subject’s skin on the following anatomical landmarks: sterno-clavicular joint, xiphoid process, 7th cervical vertebra, 10th thoracic vertebra, and for both hemi-bodies, occipital and frontal bones, gleno-humeral joint, lateral humeral epicondyle, ulnar styloid process, radial styloid process, 3rd process of the 3rd metacarpus, anterior superior iliac spine, posterior superior iliac spine, lateral tibia, lateral malleolus, heel, head of the 2nd metatarsus. From these recordings the 3D positions and orientations of each limb could be reconstructed. The players were asked to throw the ball twelve meters from the goal and to different pre-specified target zones within the goal (no goalkeeper was present).
These captured motions were then used to animate the virtual thrower using the animation engine MKM (Manageable Kinematic Motions) (Kulpa et al., 2005; Multon et al., 2008). This engine has already been used and validated for the animation of movements during a sporting duel (Bideau et al., 2004) and it offers the following capabilities: motion synchronization, blending, retargeting, and adaptation thanks to an enhanced inverse kinematics and kinetics solver (Multon et al., 2008). Complete animation was loaded in a realistic handball stadium created using 3D Studio Max (Autodesk, San Raphael, USA). In order to enhance the feeling of presence, a real goal was placed where it was virtually represented in the computer generated environment.
Virtual environment display
Three synchronized video projectors Barco 1208S (Barco, Courtrai, Belgium) driven by a SGI Onyx2 Infinite Reality were used to project the 3D sports hall environment onto a large cylindrical screen (3.80m radius, 2.38m height and 135° field of vision). Stereoscopic glasses were activated at 60Hz (30Hz for the right eye and 30Hz for the left eye) and synchronized with the system in order to give stereovision.
Data acquisition
The VICON motion capture system (Oxford Metrics, Oxford, UK) was used to record goalkeeper’s movements during the experiment and was coupled to the virtual reality display in real-time. This means that it was possible to change in real time the goalkeeper’s viewpoint in the virtual world by using the positional data of markers on the goalkeeper’s head (delay<20ms).
Visual stimuli
Five levels of virtual thrower animation level of detail (LOD) were created (Figure 1):
Figure 1.
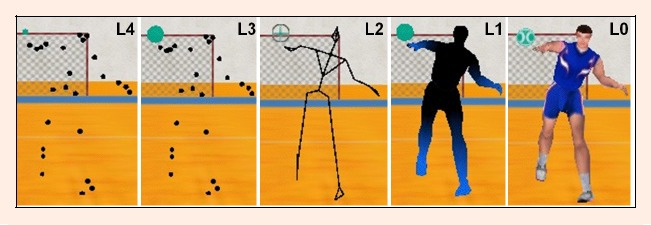
LODs of the thrower and ball animations.
- A high quality textured level animation similar to that used by Bideau et al. (2003) as being capable of invoking a high level presence (L0) (see Vignais-Video0.avi).
VignaisVideo0.avi: View of the reference textured level (L0). Available from URL:http://www.jssm.org/vol8/n4/2/0.htm)
- A first level degradation without texture on the synthetic thrower (L1) (see VignaisVideo1.avi).
VignaisVideo1.avi: View of the first-level degradation without texture on the synthetic thrower (L1). Available from URL: http://www.jssm.org/vol8/n4/2/1.htm).
- A second level of degradation using a wire-frame representation (L2) (see VignaisVideo2.avi).
VignaisVideo2.avi: View of the second-level degradation using a wire-frame representation (L2). Available from URL: http://www.jssm.org/vol8/n4/2/2.htm).
- A third level of degradation involved a PLD representation of the thrower (L3) (see VignaisVideo3.avi).
VignaisVideo3.avi: View of the third-level degradation using a point light display representation (L3). Available from URL: http://www.jssm.org/vol8/n4/2/3.htm).
- A fourth level of degradation condition (L4) similar to L3 but where the ball size was significantly reduced (see VignaisVideo4.avi). For this latter level the ball size was 5cm (for the other levels the original ball size of 15cm was used) the same size as the other points of light on the player’s body.
VignaisVideo4.avi: View of the fourth-level degradation condition (L4). Available from URL: http://www.jssm.org/vol8/n4/2/4.htm).
Procedure
The goalkeeper, equipped with stereoscopic glasses, stood inside the real goal which corresponded to the size and position of the virtual goal in the virtual environment. The different throws with different LODs were presented in a randomized order. The ball was released when the virtual thrower was twelve meters from the goalkeeper, and was occluded when the ball reached six meters from the goal. The goalkeeper was asked to stop the ball as if they were in a match situation. The goalkeeper’s response was recorded using the VICON motion capture system for each trial (Figure 2). Each goalkeeper was equipped with thirty six optoelectronic markers placed on the same anatomical landmarks as for the handball throwing action motion capture.
Figure 2.
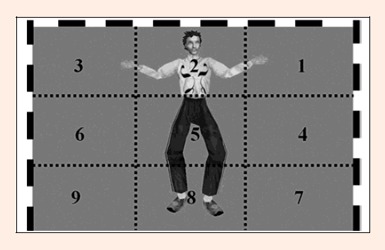
Zones aimed in the goal.
Each participant had a training period to allow them to become familiar with the environment and the task. During this time the participants were randomly presented with twenty throws (four per LOD). All trials of the training period were not included in the subsequent analysis.
A total of two different trajectories were presented for the different LODs (zones 1 and 6) (Figure 2).
The number of zones aimed (only two) was dependent on the number of trials performed by the subject (see below). Ball velocities were similar for the two trajectories (20 ± 0.2 m·s-1). The two different ball trajectories were randomly repeated five times for each LOD giving a total of fifty throws. Ten other throws to different target locations in the goal were randomly included to keep a sufficient level of uncertainty about the ball’s final arrival position. These ten other throws were not analyzed in the results part of the experiment because there were not repeated five times.
Data analysis
In order to evaluate the goalkeeper’s performance, a detection of collision process was developed. This process was used in the virtual environment by representing the goalkeeper’s limbs as cylinders (trunk, arms, forearms, thighs, shanks and feet) and spheres (head and hands) from joint centre positions. This full body representation enabled us to determine if there was a collision between the virtual ball and the goalkeeper in real time (a visual feedback was displayed after each throw). This detection of collision process provided us with several elements of the goalkeeper’s movement:
The time to respond (TTR): the interval of time between the release of the virtual ball and the peak acceleration of the forearm (Richerson et al., 2005).
The percentage of successful motor responses: The percentage of responses where there was collision between the goalkeeper’s limb and the ball.
The radial error: The difference between the goalkeeper’s closest limb position and the virtual ball position (recorded during the thrower motion capture session) (see Figure 3).
The kinematics of the goalkeeper’s motor response: the change in the absolute displacement of thecentre of mass (COM) of the forearm over the duration of the response. This kinematics analysis was divided into three steps (see Figure 4):
Figure 3.
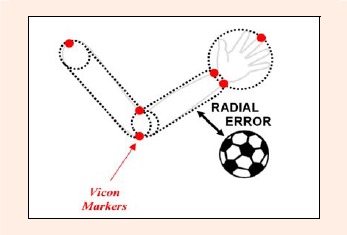
A representation of how the radial error was calculated, namely the difference between the virtual ball position and the real goalkeeper’s closest limb position.
Figure 4.
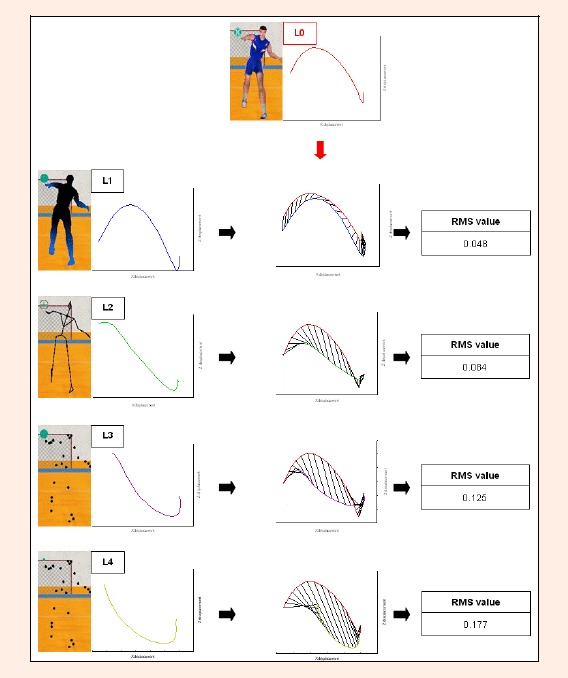
Part 3 of the kinematic analysis of the one goal-keeper’s motor response to the different levels of graphic detail for a ball arriving in zone 1.
We calculated the mean trajectory of the COM of the forearm along the mediolateral and craniocaudal axis for each LOD. The reproducibility of each mean trajectory was also calculated.
We defined the reference curve as the mean trajectory of the COM of the forearm for the L0 level of detail.
We computed a root mean square (RMS) value between the reference curve (L0) and the data of the four other levels (L1, L2, L3 and L4). RMS values for all subjects were then compared.
Statistical analysis
Data were analyzed using analyses of variance on dependent variables after examination of normality distribution (Kolmogorov-Smirnov test) and equal variances (Levene’s test). Post hoc comparisons were conducted with Tukey’s HSD test. The limit of significance was set at p < 0.05.
Results
Time to respond (TTR)
The first part of the analysis deals with TTR differences across the different levels of graphic detail for all zones aimed (Figure 5).
Figure 5.
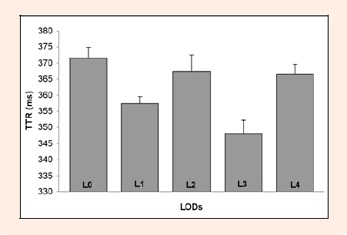
Mean TTR (ms) for all goalkeepers for each of the different LODs. The error bars represent the standard deviations in the mean scores.
Figure 5 shows quite similar values of TTR for the five different LODs with the slowest response being for L0 (the highest level of detail) (L0=371.51ms ± 3.2) and the quickest response being for L3 a PLD LOD with normal ball size (L3=348.11ms ± 4.12). Although these responses vary across conditions, the differences are not significant (F(4,45)=0.29; p = 0.96).
Percentage of successful movements
The second part of the analysis is interested in the influence of the different LODs on the participants’ ability to successfully stop the virtual ball. An action is considered successful if the position of the closest limb (sphere or cylinder) is in contact with the virtual ball sphere.
The mean percentage of successful movement does not differ much across the different LODs (L0 = 26.2% ± 3.2; L1 = 24.5% ± 2.1; L2 = 27.3% ± 5.0; L3 = 21.3% ± 4.1; L4 = 16.4% ± 2.9) (Figure 6). A one-way analysis of variance confirmed that these differences are not significant (F(4,45)=1.37; p = 0.26).
Figure 6.
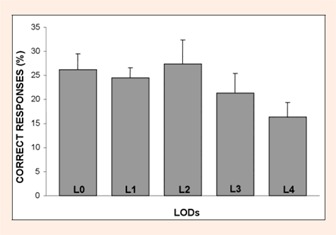
Mean percentage of correct responses for all goalkeepers for each graphical LOD across the two different ball arrival positions. The error bars represent the standard deviations.
Radial error
In the third part of the analysis, the radial error was computed for unsuccessful actions only (Figure 7).
Figure 7.
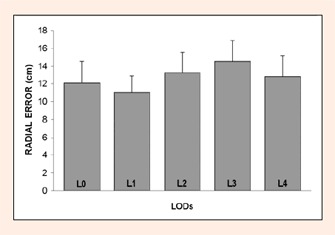
Mean radial error (cm) for all goalkeepers for each of the different LODs.
As the mean radial errors for the different LODs are relatively close (L0 = 12.1cm ± 2.44; L1 = 11.03cm ± 1.89; L2 = 13.28cm ± 2. 24; L3 = 14.51cm ± 2.32; L4 = 12.81cm ± 2.39) (Figure 6), a one-way analysis of variance did not find any significant difference (F(4,45) = 0.3; p = 0.88) (Figure 7).
Kinematics of the movement
In the last part of the analysis, we examined the kinematics of the goalkeepers’ interceptive actions. This kinematics analysis was based on the mean trajectory of limb movement (Figure 4).
We performed a statistical analysis based on the RMS values computed between the mean trajectory for the level L0 (reference curve) and the mean trajectory for each of the other graphical LODs (L1, L2, L3 and L4) (Figure 8).
Figure 8.
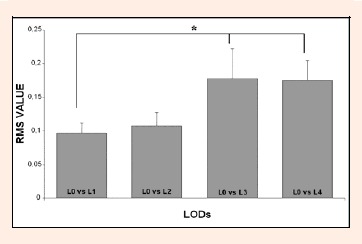
RMS values for all goalkeepers for each of the different graphical LODs. * p < 0.05.
A one-way analysis of variance revealed a significant main effect for the LOD being presented to the goalkeepers (F(3,27)=5.62; p = 0.004). Pairwise comparisons revealed that goalkeepers’ kinematics for L1 are significantly different from L3 (p < 0.05). The same trend was observed when comparing the RMS values for level L1 and L4 (p < 0.05) (Figure 8) suggesting that the kinematics of the interceptive action is significantly different when the LODs are represented by PLDs.
Discussion
In this study we examined the influence of five different LODs of an animated throwing action on the quality of handball goalkeepers’ motor responses. Although all LODs were animated with the same motion, the graphical details of the motion displayed were textured differently. The first LOD (L0) uses a virtual character that is textured and represented in a realistic way as defined by Bideau and colleagues (2003). Level L1 is based on L0 without texture. In the level L2, the links between joint centers are only represented using lines. Levels L3 and L4 both represent the throwing action by using points of light on the joints (biological motion). The only difference between L3 and L4 is the size of the ball.
The first parameter analyzed is the TTR. Our results show that there is no significant difference for any of the LODs. These findings suggest that the goalkeepers reacted temporally in the same way to the throwing motion under all of the LODs. In spite of the lack of visual details for levels L1, L2, L3 and L4, there was sufficient visual information to initiate an action in the appropriate time frame.
In the second part of the analysis we computed the goalkeepers’ percentage of successful motor responses. This goalkeeper’s performance parameter was obtained by a real-time representation of the action. It appeared that there is no significant difference between LODs for this parameter in spite of a trend for level L4. This suggests that the goalkeeper’s performance was not influenced by the different LODs of the throwing motion. This finding is consistent with Ma and Kaber’s (2006) results who have demonstrated that a decrease in the visual realism of the background during a virtual-reality-based basketball free-throw task did not affect the level of presence. Ma and Kaber, 2006 suggested that there is a threshold of visual realism necessary to induce presence in a virtual environment. Beyond that threshold it seems difficult to quantify differences in terms of presence. Our results reveal that the levels of graphical detail used in this study appear to be above this graphical threshold, despite the trend found for level L4. Data from the radial error confirmed our findings again showing no effect of graphical LOD. Since our subjects are expert goalkeepers, this report agrees with previous studies in this domain (Abernethy et al., 2001; Shim et al., 2006) which have also shown that experts’ anticipation accuracy is not degraded by the use of PLDs.
Nevertheless the kinematics of the motor response during the interceptive action does not support previous findings. In fact, this parameter demonstrates that lower graphical LODs influence the regulation of the goalkeepers’ motor response. Indeed the kinematics of the interceptive action is significantly different for levels L3 and L4 compared to the L1. This means that certain visual information necessary for the online regulation of the movement are different in levels L3 and L4 but are still sufficient to obtain the same rate of successful responses.
More precisely, it can be suggested that the different levels of information presented in levels L3 and L4 were influencing the initial stage of the stopping movement. In other words, the different LODs would cause the goalkeeper to regulate his action from different information. This point is in accordance with the idea that there exists a complete coupling between perception and action during a movement. This approach, called ecological approach, firstly expressed by Gibson, 1979, suggests that by using the visual system to pick up relevant information from the environment, we can then use this information to guide our actions. Thus perception informs movements and movement informs perception (Gibson, 1979). It seems that goalkeepers could use a prospective strategy, based on the ecological validity (Bastin et al., 2008; Araùjo et al., 2005), in order to adapt their movements in continue during the action. This adaptation of the stopping movement for levels L3 and L4 enables goalkeepers to obtain the same efficiency than for the other levels. This key point of adapting their motor response could be in relation with the level of expertise of the handball goalkeepers.
Concerning the PLD representation, it can be suggested that biological motion display with stereoscopic information can influence the regulation of the movement without affecting the efficiency of the movement. Moreover the regulation of the interceptive actions in the L2 level did not appear to be significantly different from L1 level. As the latter is significantly different from the PLD levels L3 and L4, differences in visual information available could be related to bodily joint centers information.
Conclusion
To conclude, the results demonstrate that elite goalkeepers perform similarly for all graphical LODs of a virtual throwing action but kinematics appears to be quite different for L3 and L4. Previous studies on biological motion have not been carried out with 3D displays immersive interactive virtual reality displays and have not compared PLD representations with wire-framed representations (as it was the case in the L2 level). Moreover they have not taken into account the regulation of the movement kinematics during the action. Although results about TTR, percentage of successful responses and radial error may suggest that there is no significant difference between levels of graphical detail, a more in-depth analysis of the movement kinematics does reveal a significant effect of graphical LOD. Further work is needed to try and understand the influence levels of graphical detail may have on an immersed athletes’ perception and action performance.
Acknowledgements
Authors want to thank the Bunraku team for all the support and resources made available during this study and in particular Julien Bilavarn for the work done.
Biographies

Nicolas Vignais
Employment
PhD student at the Department of Sport Sciences, Rennes 2 University, France.
Degree
MSc
Research interests
Perception and action in virtual environment, handball goalkeeping performance, ball task interception.
E-mail: nicolas.vignais@univ-rennes2.fr

Benoit Bideau
Employment
Lecturer at the Department of Sport Sciences, Rennes 2 University, France.
Degree
PhD
Research interests
Biomechanics, perception and action in sport and virtual reality, interactive behavior in different virtual sports situation.
E-mail: benoit.bideau@univ-rennes2.fr

Cathy Craig
Employment
Senior lecturer at the School of Psychology, Queen’s University of Belfast, Northern Ireland.
Degree
PhD
Research interests
Biomechanics, perception and action in sport and virtual reality, interactive behavior in different virtual sports situation.
E-mail: cathy.craig@qub.ac.uk
Sébastien Brault
Employment
PhD student at the Department of Sport Sciences, Rennes 2 University, France, and international collaborator with the School of Psychology, Queen’s University of Belfast.
Degree
MSc
Research interests
Application of virtual reality solutions to develop immersive sporting environments and analyze perceptual skills.
E-mail: sebbrault@wanadoo.fr

Franck Multon
Employment
Professor at the Department of Sport Sciences, Rennes 2 University, France.
Degree
Authorization to Supervise Research
Research interests
Biomechanics, character simulation, and interaction between real and virtual humans.
E-mail: franck.multon@univ-rennes2.fr
Paul Delamarche
Employment
Professor and director of the Department of Sport Sciences, Rennes 2 University, France.
Degree
Authorization to Supervise Research
Research interests
Physiology, biomechanics, movement, sport and health.
E-mail: paul.delamarche@univ-rennes2.fr

Richard Kulpa
Employment
Lecturer at the Department of Sport Sciences, Rennes 2 University, France.
Degree
PhD
Research interests
Biomechanics, humanoid animation in virtual environment.
E-mail: richard.kulpa@univ-rennes2.fr
References
- Abernethy B., Gill D.P., Parks S.L., Packer S.T. (2001) Expertise and the perception of kinematic and situational probability information. Perception 30, 233-252 [DOI] [PubMed] [Google Scholar]
- Araùjo D., Davids K., Serpa S. (2005) An ecological approach to expertise effects in decision-making in a simulated sailing regatta. Psychology of Sport and Exercise 6(6), 671-692 [Google Scholar]
- Barfield W., Hendrix C., Bjorneseth O. (1995) Spatial performance with perspective displays as a function of computer graphics eyepoint elevation and geometric field of view. Applied Ergonomics 26, 307-314 [DOI] [PubMed] [Google Scholar]
- Bastin J., Jacobs D.M., Morice A.H.P., Craig C., Montagne G. (2008) Testing the role of expansion in the prospective control of locomotion. Experimental Brain Research 191(3), 301-312 [DOI] [PubMed] [Google Scholar]
- Bideau B., Kulpa R., Menardais S., Fradet L., Multon F., Delamarche P., Arnaldi B., (2003) Real handball goalkeeper vs. virtual handball thrower. Presence: Teleoperators and Virtual Environments 12(4), 411-421 [Google Scholar]
- Bideau B., Multon F., Kulpa R., Fradet L., Arnaldi B., Delamarche P. (2004) Using virtual reality to analyze links between handball thrower kinematics and goalkeeper’s reactions. Neuroscience Letters 372(1-2), 119-122 [DOI] [PubMed] [Google Scholar]
- Bideau B., Kulpa R., Vignais N., Brault S., Multon F., Craig C. (2009) Virtual reality, a serious game for understanding performance and training players in sport. IEEE Computer Graphics and Applications, in press. [DOI] [PubMed] [Google Scholar]
- Brault S., Bideau B., Kulpa R., Craig C. (2009) How the global body displacement of a rugby player can be used to detect deceptive movement in 1 vs. 1. Proceedings of the 11th Virtual Reality International Conference, April 22-24, Laval-France, 161-166 [Google Scholar]
- Craig C.M., Berton E., Rao G., Fernandez L., Bootsma R.J. (2006) Judging where a ball will go: The case of curved free kicks in football. Naturwissenschaften 93, 97-101 [DOI] [PubMed] [Google Scholar]
- Cutting J.E. (1997) How the eye measures reality and virtual reality. Behavior Research Methods Instruments and Computers 29, 27-36 [Google Scholar]
- Dittrich W.H., Troscianko T., Lea S., Morgan D. (1996) Perception of emotion from dynamic point-light displays represented in dance. Perception 25(6), 727-738 [DOI] [PubMed] [Google Scholar]
- Doncescu A., Puzenat D. (2000) New mesh generating adapted to parallel systems: PVM implementation issue. Proceedings of the International Workshops on Parallel Processing, August 21-24, Toronto-Canada. 243 [Google Scholar]
- Gibson J.J. (1979) The ecological approach to visual perception. 1st edition. Houghton Miflin, Boston [Google Scholar]
- Hodgins J., O’Brien J., Tumblin J. (1998) Perception of human motion with different geometric models. IEEE Transaction on Visualization and Computer Graphics 4(4), 307-316 [Google Scholar]
- Johansson G. (1973) Visual perception of biological motion and a model for its analysis. Perception & Psychophysics 14, 201-211 [Google Scholar]
- Kelly A., Hubbard M. (2000) Design and construction of a bobsled driver training simulator. Sports Engineering 3(1), 13-24 [Google Scholar]
- Kozlowski L.T., Cutting J.E. (1997) Recognizing the sex of a walker from a dynamic point-light display. Perception & Psychophysics 21, 575-580 [Google Scholar]
- Kulpa R., Multon F., Arnaldi B. (2005) Morphology-independent representation of motions for interactive human-like animation. Computer Graphics Forum 24(3), 343-352 [Google Scholar]
- Lange J., Georg K., Lappe M. (2006) Visual perception of biological motion by form: A template-matching analysis. Journal of Vision 6(8), 836-849 [DOI] [PubMed] [Google Scholar]
- Ma R., Kaber D.B. (2006) Presence, workload and performance effects on synthetic environment design factors. International Journal of Human-Computer Studies 64, 541-552 [Google Scholar]
- Mazyn L., Lenoir M., Montagne G., Savelsbergh G. (2004) The contribution of stereovision to one-handed catching. Experimental Brain Research 157(3), 383-390 [DOI] [PubMed] [Google Scholar]
- Metoyer R., Hodgins J. (2000) Animating athletic motion planning by example. Proceedings of the Graphics Interface Conference, May 15-17, Montreal-Canada. 61-68 [Google Scholar]
- Multon F., Kulpa R., Bideau B. (2008) MKM: a global framework for animating humans in virtual reality applications. Presence: Teleoperators and Virtual Environments 17(1), 17-28 [Google Scholar]
- Peper L., Bootsma R.J., Mestre D.R., Bakker F.C. (1994) Catching balls: How to get the hand to the right place at the right time. Journal of Experimental Psychology: Human Perception and Performance 20, 591-612 [DOI] [PubMed] [Google Scholar]
- Richerson S.J., Robinson C.J., Shum J. (2005) A comparative study of reaction times between type II diabetics and non-diabetics. Biomedical Engineering OnLine (serial online) 4(12), (8 screens, inclusive pages), February. Available from URL:http://www.biomedical-engineering-online.com [DOI] [PMC free article] [PubMed] [Google Scholar]
- Sanchez-Vives M.V., Slater M. (2005) From Presence to Consciousness through Virtual Reality. Nature Reviews Neuroscience 6(4), 332-339 [DOI] [PubMed] [Google Scholar]
- Shim J., Carlton L.G., Chow J.W., Chae W.S. (2005) The use of anticipatory visual cues by highly skilled tennis players. Journal of Motor Behavior 37(2), 164-175 [DOI] [PubMed] [Google Scholar]
- Shim J., Carlton L.G., Kwon Y.H. (2006) Perception of kinematic characteristics of tennis strokes for anticipating stroke type and direction. Research Quarterly for Exercise and Sport 77(3), 326-339 [DOI] [PubMed] [Google Scholar]
- Slater M, Linakis V, Usoh M, Kooper R. (1996) Immersion, presence, and performance in virtual environments: An experiment in tri-dimensional chess. ACM Virtual Reality Software and Technology, July 1-4, Hong-Kong-China. Abstract Book: 163-172 [Google Scholar]
- Tarr M.J., Warren W.H. (2002) Virtual reality in behavioral neuroscience and beyond. Nature Neuroscience 5, 1089-1092 [DOI] [PubMed] [Google Scholar]
- Vignais N., Bideau B., Kulpa R., Craig C, Brault S., Multon F. (2009) Virtual environments for sport analysis: perception-action coupling in handball goalkeeping. Proceedings of the 11th Virtual Reality International Conference, April 22-24, Laval-France. 147-153 [Google Scholar]
- Ward P., Williams A.M., Bennett S.J. (2002) Visual search and biological motion perception in tennis. Research Quarterly for Exercise and Sport 73(1), 107-112 [DOI] [PubMed] [Google Scholar]
- Williams A.M., Elliot D. (1999) Anxiety, expertise, and visual search strategy in karate. Journal of Sport & Exercise Psychology 21, 362-375 [Google Scholar]
- Zahorik P., Jenison R.L. (1998) Presence as being-in-the-world. Presence: Teleoperators and Virtual Environments 7(1), 78-89 [Google Scholar]