

Abstract
Surface electromyogram (EMG) is often corrupted by three types of noises, i.e. power line interference (PLI), white Gaussian noise (WGN), and baseline wandering (BW). A novel framework based primarily on empirical mode decomposition (EMD) was developed to reduce all the three noise contaminations from surface EMG. In addition to regular EMD, the ensemble EMD (EEMD) was also examined for surface EMG denoising. The advantages of the EMD based methods were demonstrated by comparing them with the traditional digital filters, using signals derived from our routine electrode array surface EMG recordings. The experimental results demonstrated that the EMD based methods achieved better performance than the conventional digital filters, especially when the signal to noise ratio of the processed signal was low. Among all the examined methods, the EEMD based approach achieved the best surface EMG denoising performance.
Keywords: Surface electromyography (EMG), Denoising, Empirical mode decomposition (EMD), Ensemble empirical mode decomposition (EEMD)
1. Introduction
Electromyography (EMG) signal is electrical manifestation of a contracting muscle. The acquisition of a clean EMG is a prerequisite for an appropriate interpretation and application of the signal. Surface EMG signals, like most of the electrophysiological measurements, are frequently corrupted with three categories of noise [1], i.e. power line interference (PLI), white Gaussian noise (WGN), and motion artifact or baseline wandering (BW). In particular, efforts in multiple-channel surface EMG recording have been developed in recent years using high density electrode arrays. Due to the large number of the recording electrodes and their tiny electrode-skin contact area, noise contamination emerges as an even more challenging problem. Situations are sometimes encountered where the signal to noise ratio (SNR) is poor in a few channels.
Noise contamination may compromise the efficacy of the EMG signal processing. Thus, several methods have been proposed to reduce the noise from surface EMG signals, among which the most simple and cost-efficient solution is to use conventional digital filters. Although such filters substantially reduce the noise, they also attenuate the EMG signal due to spectral overlap of the noise and the surface EMG. It, therefore, remains a challenging problem to reduce noise without distortion of the useful EMG signals, which might require more advanced methods than the conventional digital filters. For example, adaptive or nonlinear filtering has been proposed to reduce the noise contamination while minimally sacrificing sections of the surface EMG signal [2,3]. On the other hand, taking advantages of the time-frequency resolution of the wavelet transform, wavelet thresholding has been used for noise reduction in various electrophysiological signals, including surface EMG [4]. As an alternative tool for processing nonlinear and non-stationary signals, the empirical mode decomposition (EMD) can also be used for de noising and conditioning of the electrophysiological signals [6–11], primarily using a similar approach to the wavelet based method. In contrast to the wavelet transform, the EMD decomposes a signal into a series of intrinsic mode functions (IMFs), which are zero-mean, amplitude- and frequency-modulated (AM–FM) time series representing oscillations within the processed signal [12]. The EMD is implemented via a sifting process, which is a purely data-driven, signal-dependent iterative procedure and makes no assumption about the original signal.
In this study, a novel framework based on EMD was developed to eliminate noise contamination in surface EMG. In contrast to most of the previous de noising methods that solely target a specific category of noise, a major feature of the current study is the primary reliance on the EMD for dealing with three different types of noise often present in surface EMG, particularly in high density surface electrode array recordings. Moreover, the ensemble EMD (EEMD) was used to overcome the limitation of the mode mixing routinely induced by the regular EMD [13], thus further improving the surface EMG denoising performance. The advantages of the EMD or EEMD based methods were demonstrated by comparing them with the traditional digital filters, using signals derived from our routine electrode array EMG recordings.
2. Methods
2.1. Background
2.1.1. Empirical mode decomposition (EMD)
The EMD is designed to adaptively decompose a time-series signal s(t),1 ≤ t ≤ L, into a sum of intrinsic mode functions (IMFs) ci(t),1 ≤ i ≤N,
| (1) |
where t is the time index, N denotes the number of IMFs, and rN(t) is the residual signal [12]. An IMF is defined as a function satisfying two conditions, i.e. (1) the difference between the number of extrema (including both the local maxima and minima) and zero-crossings in the time-series must be no more than one; (2) the mean value of the upper envelop (defined by maxima) and lower envelop (defined by minima) is zero through the entire time-series. Thus, an IMF is a simple oscillatory mode being symmetric with respect to zero.
The decomposition technique that sequentially extracts each IMF from the original signal is known as the sifting processing. It was detailed elsewhere [12] and is described in brief here. The processing starts from identification of the local maxima and minima of x(t), an auxiliary variable of the original signal s(t). Two cubic spline curves are fitted to the local maxima and minima to form the upper envelope Eu and lower envelope El, respectively. The mean of the Eu and El, designated as Em, is calculated and used to update x(t) by subtracting it from the x(t). The previous steps are iteratively executed until x(t) is updated into an IMF c1(t), which satisfies the two definition conditions. The residual r1(t), calculated by subtracting the first IMF c1(t) from the initial x(t), is then treated as a new signal and the previous sifting process is repeated to obtain all the possible IMFs until the residual rN(t) is either a constant, a monotonic slope, or a function with only one extremum. If we refer the residual rN(t) as the (N + 1)th order IMF cN+1(t), the formula (1) can be reorganized as:
| (2) |
With the above sifting process, the lower-order IMFs carry the fast oscillation modes whereas the higher-order IMFs carry slow oscillation modes.
2.1.2. Ensemble empirical mode decomposition (EEMD)
The EEMD is anoise-assisted approach developed to improve the standard EMD [13]. For EEMD, the sifting process is performed on an ensemble of noise-added signals u(t), each derived from a summation of the original signal s(t) and a different white noise w(t) of finite amplitude, i.e. u(t) = s(t) + w(t). Each u(t) can be decomposed by the EMD algorithm. The resultant IMFs, namely cij(t), are averaged across trials to obtain the final IMFs:
| (3) |
where i is the IMF order, j denotes the trial index, and NT is the total number of trials.
By such an average, it is assumed that the added noise in each trial can be cancelled. The rationale for addition of the white noise is to facilitate the final IMFs in comparable scales that are relatively independent of the local time-domain characteristics of the signal, thus reducing the mode mixing induced by the regular EMD. In this study, the white noise was added to the original signal at a 5 dB SNR and NT was set to be 100.
2.2. EMD/EEMD-based filtering method
The EMD/EEMD-based filtering methods can be summarized into two categories: (1) partial reconstruction, and (2) IMF filtering. In the first category, the noisy EMG could be filtered with partial reconstruction of IMFs:
| (4) |
where 1 ≤ p < q ≤ N + 1. By choosing different p or q values, a low-pass, high-pass, or band-pass filter can be designed [9]. For the other category, each IMF ci(t) can be filtered respectively, resulting in c̃i(t). The filtered signal can be reconstructed as:
| (5) |
In this study, three IMF filtering schemes targeting PLI, WGN and BW were proposed within the EMD/EEMD-based filtering framework.
2.2.1. PLI reduction
After EMD or EEMD of a surface EMG signal contaminated by PLI, several IMFs may carry both PLI and useful signals. To assess the PLI components, a second order notch filter (cutoff frequencies 60 Hz and harmonics) was applied to each of the IMFs. Assuming ai(t) is the notch filter output of the ith-order IMF ci(t), 1 ≤ i ≤ N + 1, we define εi to quantify the PLI involvement in each IMF:
| (6) |
where var[.] is an operator to calculate the variance of a time-series. Each of the filtered IMFs c̃i(t) is defined as:
| (7) |
In other words, if there is a clear PLI component involved in the IMF (above 10% energy proportion), the notch filter will be applied. Otherwise, the IMF remains unchanged.
2.2.2. WGN reduction
To reduce WGN using EMD or EEMD, a similar approach to wavelet-based denoising methods can be used, described as
| (8) |
for hard thresholding and as
| (9) |
for soft thresholding, where c̃i(t) denotes the thresholded version of the i-th order IMF, and Ti denotes a threshold for the order i.
To overcome the discontinuity of the reconstructed signals induced from the abovehard or soft thresholding, an alternative strategy, namely EMD interval thresholding (EMD-IT), was developed to adapt the EMD characteristics [5]. For EMD-IT, the entire time-series of the ith-order IMF ci(t) can be divided by its zero-crossings zi,j into several concatenated intervals zi,j = [zi,j, …, zi,j+1], where j is the index of the zero-crossings. Whether a specific interval zi,j is noise-dominant or signal-dominant can be identified by the amplitude ci(ti,j) of its extreme instant ti,j located in the interval, zi,j < ti,j < zi,j+1. As a result, the EMD-IT translates to
| (10) |
for hard thresholding and to
| (11) |
for soft thresholding, where the ci(zi,j) indicates the samples in the interval zi,j from instant zi,j to zi,j+1 of the ith-order IMF. Similarly, the EMD-IT can also be applied to the EEMD algorithm.
In this study, the EMD-IT soft thresholding was used. The thresholds were adaptively set as [5,14]:
| (12) |
where L is signal length and σi is the noise level for ith-order IMF estimated as [14]:
| (13) |
2.2.3. BW reduction
The BW components mainly involve in the higher-order IMFs. A signal with BW can be decomposed into a sum of IMFs ci(t),1 ≤ i ≤ N + 1. To assess the BW components, a bank of low pass filters hi(t),1 ≤ i ≤ N + 1, were utilized to process each of the IMFs:
| (14) |
where * denotes the convolution and di(t) is the filtered IMF. The cut-off frequencies ωi of the lowpass filters hi(t) can be set as [7]
| (15) |
where ω0 is the cut-off frequency of hN+1(t) and M > 1 is a frequency-folding coefficient. The selection of the cut-off frequencies in such a form is based on the fact that relatively large BW components are present in the higher-order IMFs [7]. In this study, ω0 and M were set to be 30 and 1.02 respectively. Similarly, εi was defined to quantify the BW involvement in each IMF:
| (16) |
Thereby, the BW component bi(t) in each IMF was extracted according to εi:
| (17) |
Consequently, the denoised signal can be reconstructed from the filtered IMFs defined as:
| (18) |
and the BW can be estimated as:
| (19) |
2.3. Performance evaluation
The performance of the proposed methods was examined using our routine surface electrode array EMG recordings with a Refa EMG system (TMS International BV, Enschede, Netherlands). Sample surface EMG recordings from the thenar group muscles of amyotrophic lateral sclerosis patients were used for this analysis [15]. Two relatively high clean surface EMG signals (denoted as EMG1 and EMG2) and each of the three typical noises were selected to simulate different testing signals. All the selected signals were recorded in a time period of 1 s and with a sampling rate of 2 kHz. A noisy surface EMG signal s(t) can be generated as:
| (20) |
where x(t) is the highly clean experimental surface EMG, n(t) is a noise segment, and δ is the scale factor used to adjust the signal to noise ratio (SNR):
| (21) |
The performance of the proposed methods were compared with the conventional IIR filters, including second-order notch filters (cutoff frequencies: 60 Hz and harmonics) and a fourth-order Butter worth band-pass filter (cutoff frequencies: 30–450 Hz) [16]. Both causal and non causal filters were implemented [17]. To compare the different methods, the signal to error ratio (SER) was used as the performance index, which is defined as
| (22) |
where x̂(t) is the signal after the denoising.
3. Results
The typical results from EMD and EEMD are presented in Fig. 1, where a relatively clean surface EMG signal contaminated primarily by PLI was decomposed into IMFs by EMD and EEMD, respectively. The IMF distribution indicates that the lower-order IMFs contain relatively high-frequency components while the higher-order IMFs contain relatively low-frequency components. Such a distribution is similar to filter bank but not exactly band-restricted, due to the fact that IMF was adaptively extracted based on the inherent signal oscillation structure, not the predetermined frequency band.
Fig. 1.
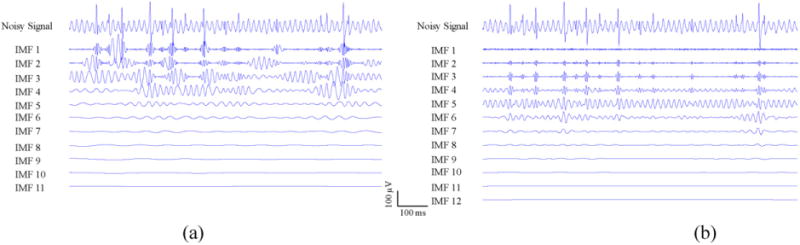
An example of the EMD (a) and EEMD (b) decomposition of a surface EMG signal contaminated by PLI.
It is noted that because of the reduced mode mixing effect, each IMF derived from EEMD contains more concentrated and band limited components, as compared to that from EMD. For example, the PLI oscillation mode is assigned in three different IMFs (IMF 2, 3 and 4) as a result of EMD (Fig. 1a); whereas it is primarily involved in only one IMF (IMF 5) of EEMD (Fig. 1b). In addition, IMF 1 resulted from EEMD usually contains high-frequency noise free of any useful EMG signal. Therefore, the first IMF of EEMD can be removed for the signal reconstruction, thus effectively reducing high frequency noise. These advantages of EEMD can improve the denoising performance, as demonstrated in the following examples.
A comparison of the different surface EMG denoising methods is demonstrated in Figs. 2–4, with each example targeting a different category of noise, respectively. From the outputs of each method, it can be observed that the EMD/EEMD-based methods achieved better performance than conventional filtering methods to remove different noise from surface EMG. To quantitatively compare the denoising performance, the SER values of different methods were compared when they were applied to simulated noisy surface EMG signals derived from highly clean experimental surface EMG and typical noise recordings. The performance for different SNR levels' surface EMG is presented in Table 1. We found that the SER values from the IIR causal filter were the lowest due to the imposed nonlinear phase response. In general, the EMD or EEMD-based methods achieved higher SER values than the conventional digital filtering methods. The EEMD-based method achieved the highest SER values among all the methods, particularly when the processed signal had low SNRs.
Fig. 2.

An example of reducing PLI from surface EMG using different methods. From top to bottom: (a) the original highly clean surface EMG signal (denoted as EMG1); (b) the surface EMG signal contaminated by PLI noise; (c) the output of the IIR causal filter; (d) the output of the IIR noncausal filter; (e) the output signal after EMD filtering; and (f) the output signal after EEMD filtering.
Fig. 4.
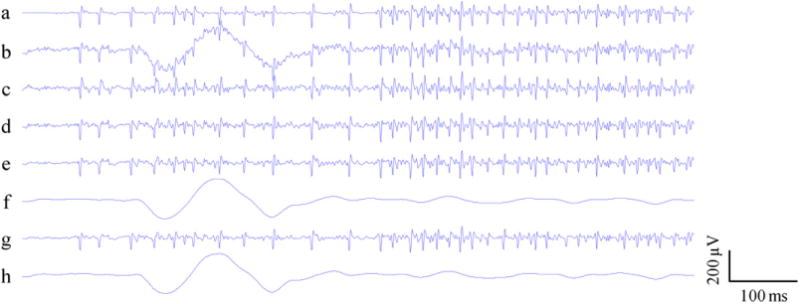
An example of reducing BW from surface EMG using different methods. From top to bottom: (a) the original highly clean surface EMG signal (denoted as EMG2); (b) the surface EMG signal contaminated by BW noise; (c) the output of the IIR causal filter; (d) the output of the IIR noncausal filter; (e) the output signal after EMD filtering; (f) the estimated BW noise after EMD filtering; (g) the output signal after EEMD filtering; and (h) the estimated BW noise after EEMD filtering.
Table 1.
A comparison of the SER (dB) from four different filtering methods. Maximum SER values of the same noise category and level are marked in bold.
| Noise type | Method | EMG 1 | EMG 2 | ||||||
|---|---|---|---|---|---|---|---|---|---|
|
|
|
||||||||
| SNR = −6 dB | SNR = −2 dB | SNR = 2 dB | SNR = 6 dB | SNR = −6 dB | SNR = −2 dB | SNR = 2 dB | SNR = 6 dB | ||
| PLI | IIR Causal | 3.138 | 4.025 | 4.390 | 4.515 | 2.198 | 3.257 | 3.828 | 4.110 |
| IIR Noncausal | 7.062 | 10.27 | 12.75 | 14.34 | 7.120 | 10.41 | 13.01 | 14.74 | |
| EMD | 7.305 | 10.50 | 12.70 | 14.18 | 7.569 | 11.28 | 13.45 | 15.81 | |
| EEMD | 9.150 | 11.22 | 13.56 | 15.10 | 8.699 | 11.59 | 14.16 | 16.03 | |
| WGN | IIR Causal | −4.777 | −1.881 | 1.203 | 2.996 | −4.633 | −1.272 | 1.400 | 3.154 |
| IIR Noncausal | −4.036 | −1.458 | 3.944 | 7.905 | −4.037 | −0.041 | 3.950 | 7.929 | |
| EMD | 1.891 | 4.469 | 6.301 | 8.383 | 0.687 | 2.905 | 5.481 | 8.130 | |
| EEMD | 3.155 | 5.785 | 8.707 | 11.30 | 1.476 | 3.670 | 6.121 | 9.475 | |
| BW | IIR Causal | 3.186 | 4.087 | 4.696 | 4.955 | 3.132 | 4.008 | 4.415 | 4.590 |
| IIR Noncausal | 8.506 | 12.37 | 16.05 | 19.38 | 8.624 | 12.59 | 16.39 | 20.19 | |
| EMD | 9.382 | 12.95 | 15.62 | 18.66 | 9.316 | 12.75 | 16.40 | 20.04 | |
| EEMD | 10.67 | 13.88 | 16.22 | 18.36 | 9.355 | 12.43 | 15.34 | 17.75 | |
Fig. 5 shows a comparison of different denoising methods when they were applied to an experimental surface EMG signal contaminated by all of the three categories of noise. The processed surface EMG signal, the filtered outputs, and the residuals from the different methods are all demonstrated. Consistently, the EMD- or EEMD-based methods demonstrated better performance compared with traditional digital filters.
Fig. 5.
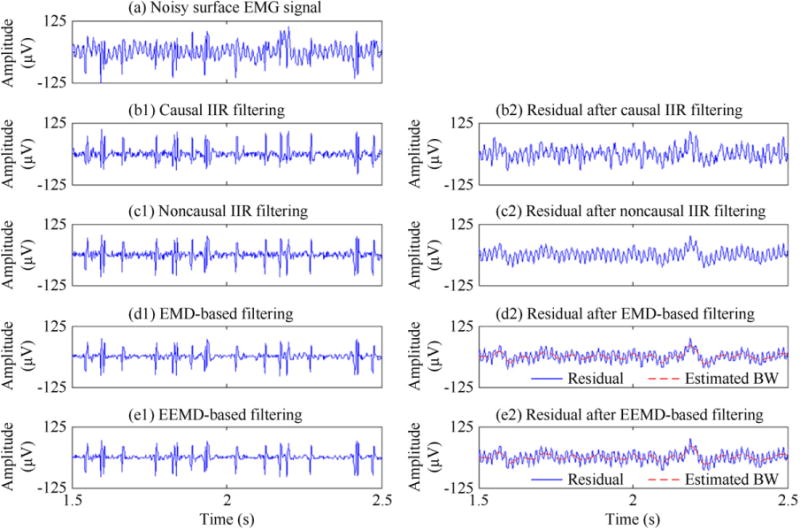
An example of reducing three different noise contaminations from surface EMG using different methods. The residual was calculated as the difference between the original signal and the filtered output. For EMD/EEMD-based methods, the estimated BWs are also demonstrated along with the residual signals.
4. Discussions and conclusion
An EMD/EEMD-based IMF filtering framework was presented in this study to remove all the three common categories of noise (i.e. PLI, WGN, and BW) from surface EMG recordings. EMD is a powerful tool for processing nonlinear and nonstationary physiological signals with complex temporal-spatial structure. It can adaptively separate an original complex signal into a set of IMFs with different oscillation levels, thus offering an interpretation of the dynamic processes underlying the system generating the signal. Since the origins of multiple noises can be viewed as having different dynamic properties from the origins of the useful signal, the noise components are prone to be separated in limited number of band-restricted IMFs. Taking advantage of the EMD, we demonstrated that different noise contaminations in surface EMG can be adaptively removed based on an IMF filtering framework, where different IMFs were appropriately filtered according to the characteristics of each specific noise.
The advantage of EMD method for noise removal from a variety of physiological signals has been recently demonstrated in different studies [5–11]. Most of them, however, only targeted one specific category of noise [5,6,8,10] or simply assumed that the noise can be ideally separated in a specific IMF to be deleted for the purpose of noise removal [8–10]. The EMD-based method for noise reduction from surface EMG in this study can be viewed as the combination and extension of the previous methods. By integrating and optimizing different noise reduction solutions within a uniform IMF filtering framework, we are able to remove different categories of noise from surface EMG at the same time. The effectiveness of the proposed EMD-based method was validated by our experiment results which showed better performance than the conventional digital filters.
Furthermore, an important feature of this study is the employment of the ensemble EMD (EEMD), which produces a set of more strictly band-restricted IMFs by eliminating the problem of mode mixing routinely induced from the standard EMD. Based on such a property, the EEMD method can separate each category of noise within fewer IMFs, thus facilitating the removal of such noises with different time-frequency distribution. For example, the narrowband noise (here PLI) in Fig. 1b is prone to be concentrated in one IMF (IMF 5), so the appropriate processing can be performed accordingly. From Table 1, it is observed that the EEMD-based methods achieved the best performance for PLI or WGN elimination at all the tested SNR levels. For BW reduction, the advantage of the EEMD over the EMD or conventional digital filtering based methods was also demonstrated when the SNR of the processed signal was relatively low. The customized filtering performed on a limited number of IMFs generated by the EEMD mostly contributed to such improved performance of the noise removal while reducing distortion of the signal of interest.
We acknowledge that compared with conventional digital filters, the proposed EMD/EEMD based methods are more computationally complex. Particularly, the EEMD algorithm includes repetitive implementation of regular EMD over a number of trails, thus dramatically increase the computational burden. In a general sense, methods that reply on complicated signal processing techniques (e.g., wavelet transform [14], adaptive filter [2,3], and EMD [6]) may improve denoising performance compared with conventional digital filters, as demonstrated in this study. Nonetheless, they also impose additional computational complexity. Thus, a tradeoff or balance between denoising performance and computational efficiency is to be determined, depending on specific applications.
In conclusion, we present a surface EMG filtering method based on EMD, targeting three common categories of noise that majorly contaminate surface EMG recordings under clinical and laboratory condition. The performance of the EMD based methods were compared with the traditional digital filters, using signals derived from our routine electrode array EMG recordings. The EMD based method achieved better performance than the conventional digital filters. Furthermore, the performance of the ensemble EMD (EEMD) was also examined for surface EMG denoising. We found that the noise components were prone to be separated in limited number of band-restricted IMFs, thus facilitating the removal of different noise. Among all the examined methods, the EEMD achieved the best surface EMG denoising performance when the SNR of the processed signal was relatively low.
Fig. 3.
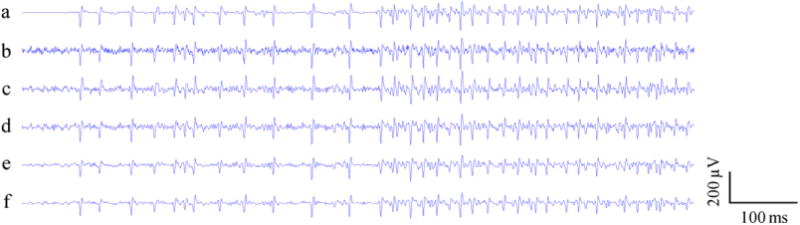
An example of reducing WGN from surface EMG using different methods. From top to bottom: (a) the original highly clean surface EMG signal (denoted as EMG2); (b) the surface EMG signal contaminated by WGN; (c) the output of the IIR causal filter; (d) the output of the IIR noncausal filter; (e) the output signal after EMD filtering; and (f) the output signal after EEMD filtering.
Acknowledgments
Funding: This work was supported in part by the National Institute on Disability and Rehabilitation Research of the U.S. Department of Education under Grant H133G090093, in part by the National Institutes of Health of the U.S. Department of Health and Human Services under Grant 1R21NS075463 and Grant 2R24HD050821, in part by the Searle-Chicago Community Trust Foundation, in part by the Davee Research Foundation, in part by the National Natural Science Foundation of China under Grant 81271658, and in part by the 1000 Talent Plan Special Program of China (Recruitment Program of Global Experts).
Footnotes
Ethical approval: The study was approved by the Institutional Review Board of Northwestern University, Chicago, IL, USA (reference number: STU00014437).
Conflict of interest: None declared.
References
- 1.Clancy EA, Morin EL, Merletti R. Sampling, noise-reduction and amplitude estimation issues in surface electromyography. J Electromyogr Kinesiol. 2002;12(1):1–16. doi: 10.1016/s1050-6411(01)00033-5. [DOI] [PubMed] [Google Scholar]
- 2.Beck TW, DeFreitas JM, Cramer JT, Stout JR. A comparison of adaptive and notch filtering for removing electromagnetic noise from monopolar surface electromyographic signals. Physiol Meas. 2009;30(4):353–61. doi: 10.1088/0967-3334/30/4/001. [DOI] [PubMed] [Google Scholar]
- 3.Aschero G, Gizdulich P. Denoising of surface EMG with a modified Wiener filtering approach. J Electromyogr Kinesiol. 2010;20(2):366–73. doi: 10.1016/j.jelekin.2009.02.003. [DOI] [PubMed] [Google Scholar]
- 4.Zhou P, Rymer WZ. An evaluation of the utility and limitations of counting motor unit action potentials in the surface electromyogram. J Neural Eng. 2004;1(4):238–45. doi: 10.1088/1741-2560/1/4/007. [DOI] [PubMed] [Google Scholar]
- 5.Kopsinis Y, McLaughlin S. Development of EMD-based denoising methods inspired by wavelet thresholding. IEEE Trans Signal Process. 2009;57(4):1351–62. [Google Scholar]
- 6.Andrade AO, Nasuto S, Kyberd P, Sweeney-Reed CM, van Kanijn FR. EMG signal filtering based on empirical mode decomposition. Biomed Signal Process Control. 2006;1(1):44–55. [Google Scholar]
- 7.Blanco-Velasco M, Weng B, Barner KE. ECG signal denoising and baseline wander correction based on the empirical mode decomposition. Comput Biol Med. 2008;38(1):1–13. doi: 10.1016/j.compbiomed.2007.06.003. [DOI] [PubMed] [Google Scholar]
- 8.Chang KM, Liu SH. Gaussian noise filtering from ECG by Wiener filter and ensemble empirical mode decomposition. J Signal Process Syst. 2011;64(2):249–64. [Google Scholar]
- 9.Chang KM. Arrhythmia ECG noise reduction by ensemble empirical mode decomposition. Sensors. 2010;10(6):6063–80. doi: 10.3390/s100606063. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 10.Nimunkar AJ, Tompkins WJ. EMD-based 60-Hz noise filtering of the ECG. Proceedings of 29th IEEE EMBS; 2007; pp. 1904–7. [DOI] [PubMed] [Google Scholar]
- 11.Liang H, Lin Z, McCallum RW. Artifact reduction in electrogastrogram based on empirical mode decomposition method. Med Biol Eng Comput. 2000;38(1):35–41. doi: 10.1007/BF02344686. [DOI] [PubMed] [Google Scholar]
- 12.Huang NE, Shen Z, Long SR, Wu MC, Shih HH, Zheng Q, Yen YC, Tung CC, Liu HH. The empirical mode decomposition and the Hilbert spectrum for non-linear and non-stationary time series analysis. Proc R Soc Lond. 1998;454:903–95. [Google Scholar]
- 13.Wu Z, Huang NE. Ensemble empirical mode decomposition: a noise assisted data analysis method. Adv Adapt Data Anal. 2009;1(1):1–14. [Google Scholar]
- 14.Huang HC, Cressie N. Deterministic/stochastic wavelet decomposition for recovery of signal from noisy data. Technometrics. 2000;42:262–76. [Google Scholar]
- 15.Mello RGT, Oliveira LF, Nadal J. Digital Butterworth filter for subtracting noise from low magnitude surface electromyogram. Comput Methods Prog Biomed. 2007;87(1):28–35. doi: 10.1016/j.cmpb.2007.04.004. [DOI] [PubMed] [Google Scholar]
- 16.Quian Quiroga R. What is the real shape of extracellular spikes? J Neurosci Methods. 2009;177(1):194–8. doi: 10.1016/j.jneumeth.2008.09.033. [DOI] [PubMed] [Google Scholar]
- 17.Zhou P, Barkhaus PE, Zhang X, Rymer WZ. Characterizing the complexity of spontaneous motor unit patterns of amyotrophic lateral sclerosis using approximate entropy. J Neural Eng. 2011;8(6):066. doi: 10.1088/1741-2560/8/6/066010. [DOI] [PubMed] [Google Scholar]