

Abstract
Since its inception, the discipline of microfluidics has been harnessed for innovations in the biomedicine/chemistry fields—and to great effect. This success has had the natural side-effect of stereotyping microfluidics as a platform for medical diagnostics and miniaturized lab processes. But microfluidics has more to offer. And very recently, some researchers have successfully applied microfluidics to fields outside its traditional domains. In this Focus article, we highlight notable examples of such “unconventional” microfluidics applications (e.g., robotics, electronics). It is our hope that these early successes in unconventional microfluidics prompt further creativity, and inspire readers to expand the microfluidics discipline.
Introduction
Microfluidics, as a discipline, was conceived roughly two decades ago by the analytical chemistry community, which envisioned it as a way to improve the efficiency, size, and cost of existing analytical methods.1,2 Since then, scientists and engineers have used microfluidics as an enabling technology for innovations in a variety of related fields, from point-of-care diagnostics to optical imaging to drug discovery.3–6 There is plenty of literature reviewing the progression of microfluidic applications in these fields.
However, in recent years, microfluidics—and associated microfluidic fabrication techniques—have been applied successfully to fields outside of their conventional domains. Take, for example, the recent microfluidics work in the field of electronics.7–9 In this Focus article, we review some of the latest and most interesting of these “unconventional” microfluidic applications. It is our firm belief that intermingling microfluidics with fields beyond the traditional biomedicine/chemistry nexus will result in some interesting innovations. And it is our hope that, in reading about the unconventional microfluidics highlighted in this article, researchers are inspired to think expansively about where the microfluidics discipline can go next.
Microfluidic-based temporary button features for touchscreen displays
The touchscreen has recently become a hallmark of modern life: in 2012, 1.2 billion were made for smartphones and 130 million for tablets, and they’re showing up in everything from game consoles to car navigation interfaces.10 Though it had been around in various forms for some time, it was the launch of the iPhone in 2007 that elevated touchscreen technology (e.g., multi-touch gestures) and made it a must-have interface for consumer electronics. Initially, skeptics questioned whether the lack of physical feedback associated with the touchscreen interface would prevent users from embracing such devices. Of course, touchscreen devices saw rapid and pervasive adoption; it was apparent that consumers preferred the benefits of the touchscreen interface, even if they had to forgo the physical feedback associated with pushing a button or rolling a track-wheel.
So engineers began devising ways to give touchscreens some form of physical feedback. To date, the most prominent methods have been vibration, in which the screen is vibrated in response to a type of touch, and directional force feedback, in which the screen is physically moved in the device plane in response to touch movements. Although these feedback mechanisms both register when a touch has been made (additionally, the directional force technique provides some sense of swipe directionality), neither technique is good at delineating whether the proper touch has been made. For example, if the user is typing on a virtual touchscreen keyboard, if the user hits ‘t’ when they meant to hit ‘r’, the vibration and directional force feedback mechanisms do not differentiate between the intended touch and actual touch. In other words: there are situations in which the physical feedback associated with traditional buttons still reigns supreme.
In response to this problem, a company called Tactus Technology has created a microfluidic-based, flat, transparent “tactile layer” that can sit atop a touchscreen and form temporary depressible buttons (Fig. 1(a)).11,12 The tactile layer is made of a multilayer stack. The top-most layer of the stack consists of an optically clear and flexible polymer. Underneath this, a series of microchannels run through a transparent substrate. Holes in the substrate exist at predefined locations, such that when pressure is applied to the fluid in the microchannels (via a proprietary actuation system), the polymer is bowed upwards, forming a physical button (Fig. 1(b)).
Fig. 1.
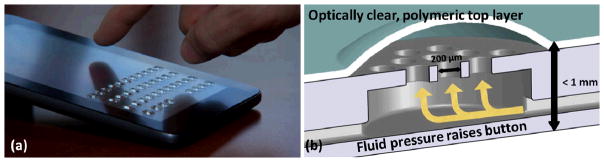
(a) Three-dimensional, transparent, fluid-filled buttons overtop a touchscreen; buttons automatically rise from the screen when needed for typing and recede after typing is complete. (b) Buttons result from an embedded microfluidic network; an increase in fluid pressure causes fluid movement through the microholes, forcing the polymeric layer to bulge outward and creating a series of depressible buttons. Images reproduced from Refs. 11 and 12.
The tactile layer is designed (i.e., the microhole locations are selected) according to the desired button locations on the touch screen. The tactile layer is then laid overtop the touchscreen during the manufacturing process. Based on the content shown on the screen, pressure is applied to or removed from the fluid in the embedded microfluidic network, causing fluid-filled buttons to rise out of or recede into the tactile layer. This provides real-time, content-based physical features for interacting with the underlying touchscreen, such as keyboard buttons that automatically rise from the screen when typing is needed, then automatically recede when typing is completed. Fig. 1(a) shows an image of a tactile screen with keyboard buttons activated. Tactus expects the first commercial deployment of its technology by the end of this year. The company envisions applications to all touch screens, moving beyond the phone/tablet market to TVs, car consoles, etc.
Flexible microfluidic electronics
Modern digital electronics are built with semiconductor materials, and such semiconductor materials are rigid, limiting the physical configurability of an electronic device. Flexible, bendable electronics would allow a user to change a device’s shape as needed, creating a brand new paradigm for electronic device design. In an effort to approximate total device flexibility, manufacturers often build what are, in effect, articulated electronics: groupings of small, rigid components with flexible interconnections (e.g., a foldable keyboard).
In the past few years, researchers have begun harnessing microfluidics to build flexible electronic devices.13 Recently, Shi Cheng et. al. used microfluidics to create a stretchable and deformable 900 MHz radiation sensor.8 The device consisted of a large-area radio frequency (RF) antenna and a small cluster of conventional rigid electronic components for RF power detection. The RF antenna was created by patterning a microfluidic channel grid in polydimethylsiloxane (PDMS) using standard microfabrication techniques, adhering the patterned PDMS to a flat piece of PDMS to close the channels, and injecting a room-temperature conductive liquid alloy (Galinstan) to fill the channels. The small cluster of conventional rigid electronics (for converting received RF power to the corresponding DC voltages) was brought into electrical contact with the Galinstan of the RF antenna, and was then locally covered with PDMS, creating a PDMS-enclosed flexible RF radiation sensor with two wire leads exiting the PDMS for power supply (Fig. 2(a)).
Fig. 2.

Flexible microfluidic radiation sensor: (a) unstretched, (b) stretched with 15% elongation in the horizontal direction, (c) under manual applied strain in both the horizontal and vertical directions, and (d) under severe twisting. Images reproduced from Ref. 8.
The antenna was shown to have an unstretched radiation efficiency of 94%, and a radiation efficiency of higher than 80% when it was stretched to 15% (Fig. 2(b)), which is better than most internal antennas in mobile handsets. When exposed to direct RF illumination by a radiation source placed 5 m away, the radiation sensor maintained RF indication even under severe folding and twisting (Fig. 2(c) and (d)). Thus the microfluidic RF antenna showed good functionality and mechanical ruggedness. And because the enclosed metal is a liquid—rather than in the form of solid wires—there is no concern about mechanical stress leading to breakage and disruption of electrical continuity.
This radiation sensor is a prominent example of flexible microfluidic electronics, but it is not the only example. Other interesting work is being done to marry microfluidics and electronics, with the intent of making electronics devices light-weight, bendable, and stretchable. There is potential for innovation in this emerging paring of disciplines. An example of such innovation is contained in the next section, where we examine the use of microfluidics to create a capacitive tactile sensor.
Flexible microfluidic force sensor for tactile feedback
For decades, engineers have devised sensors that attempt to approximate the human sense of touch. Such force-sensing capabilities are directly applicable to robotics and prosthetic limbs, where tactile feedback is required to achieve effective grasp. In many cases, the ideal tactile sensor is one that mimics the human finger: its sensitivity, its fine spatial resolution, its fast response time, its sensing ability across a curved and deformable surface, and its ability to change shape slightly to accommodate the object being manipulated while still maintaining sufficient pressure for grip. Sensors designed to approximate the human finger have used various technologies, including micro-inductors, electro-active polymer based strain gauges, piezoelectric polymeric transducers, and MEMS-based devices.14
In an effort to make a flexible tactile sensor with robustness to cracking and fatigue, Wong et. al. recently developed a flexible microfluidic capacitive normal force sensor.15 The sensor consists of PDMS with three layers of embedded microfluidic channels: an upper layer containing Galinstan (the same conductive liquid alloy used to fabricate the RF antenna described in the previous section), a lower layer also containing Galinstan, and a middle layer containing enclosed air. The metal-filled channels form a 5×5 array of individually addressable tactile elements (also known as taxels), as shown in Fig. 3. Because this array is separated by compressible air-filled chambers, the result is a sensor whose capacitance changes as a result of normal force applied to the sensor surface.
Fig. 3.
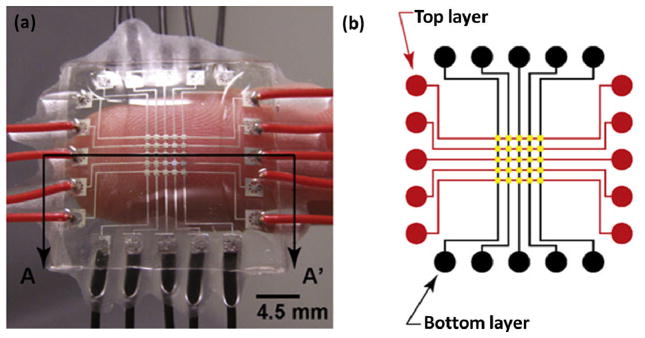
Flexible microfluidic sensor that uses capacitance changes between liquid metal-filled microfluidic channels to measure normal force. (a) Device prototype, with conductive channels in top and bottom PDMS layers, separated by a middle layer of enclosed air channels. No solid electronics components are used. (b) Schematic of the top and bottom channel layers, forming a 5×5 array of sensing locations, called taxels, in the middle of the device. Image reproduced from Ref. 15.
Each of the 25 taxels were load-tested with static uniaxial loads ranging from 0–2.5 N, as well as low-frequency dynamic loads (0.4–4 Hz), to characterize the response of the sensor. The sensor demonstrated repeatability, a spatial resolution of approximately 0.5 mm at the taxel locations, and an ability to follow low-frequency loading and unloading phases. The sensor also performed reliably when wrapped around a surface with curvature similar to that of a human finger, and tolerated more challenging curvatures as well.
This intriguing tactile sensor approach provides good sensitivity and excellent flexibility. There are no solid components (e.g., wires), so there is no concern of sensor failure due to mechanical stress. The sensor is chemically inert, inexpensive, and its design can be tuned to fit the application by adjusting the thicknesses of the PDMS and air (which combine to form the device’s dielectric medium). The authors envision deploying such devices in robotic fingers, exploiting their flexibility to provide robust force measurement under circumstances of sensor deformation.
Stretchable, self-healing microfluidic electric wires
There has been remarkable progress in the development of polymers that, if severed, can reform chemical attachments and therefore recombine to form a whole. These self-healing polymers have obvious applications in robotic end-effectors: in efforts to mimic the human hand, a robotic hand would require flexible touch sensors to emulate the skin surface, and the material of these touch sensors should have some capacity to self-heal, thus emulating the human skin’s ability to repair itself. To date, researchers have introduced polymers that self-heal as a result of incident light, heating, or even just physical contact.16–19
In an effort to build self-healing conductors, Palleau et. al. fabricated a cylindrical microchannel in self-healing polymer and filled the channel with the liquid metal eutectic gallium indium (EGaIn).7 The polymer used was called Reverlink, and is a registered trademark of Arkema France; if a piece of Reverlink is severed, functional groups grafted in the polymer generate strong hydrogen bonding that permits the polymer to self-heal if the pieces are placed in contact with one another. The microchannel was created by pouring the polymer around a copper wire coated with Teflon spray to minimize adhesion, curing the polymer, and then extracting the wire. Injection of EGaIn into the channel then enabled electrical conduction along the channel, forming what the authors termed a self-healing stretchable (SHS) wire.
Experiments with the SHS wire demonstrated it could be subjected to a tensile strain of 150% before failure. Electrical continuity was maintained during stretching, although the resistance increased due to narrowing of the channel cross-section. And when the SHS wire was severed, the surface of the liquid metal oxidized rapidly, forming a thin layer of solid oxide that adhered to the surrounding polymer, preventing liquid metal from exiting the exposed channel (continuing the human skin analogy, this is like blood clotting at a cut). When the two severed pieces were aligned and placed into physical contact with one another, the liquid metal merged together to reform a continuous and conductive wire, and the polymer healed to reform a continuous piece. After restoration, the wire’s resistance was slightly increased (Fig. 4(b))—which the authors attribute to imperfect alignment of the channel interfaces or displacement of small amounts of metal during the severing process—and the polymer failed at a lower strain, around 60% (Fig. 4(b)). Despite the slight degradation in capabilities post-heal, this SHS wire has a host of possible applications, and the implications for robotic end-effectors are exciting.
Fig. 4.

Self-healing stretchable wire. (a) Schematic demonstrating the severing and restoration of the conduction path. (b) Relative resistance of the wire during a severing-restoration sequence. The researchers attribute the slight increase in resistance after restoration to imperfect alignment of the channel interfaces or displacement of small amounts of metal during the severing process. (c) Mechanical characterization of the wire before being cut (continuous line) and after being restored (discrete points). The self-healed polymer fails at a lower strain (~60%). Image reproduced from Ref. 7.
Microfluidic-based soft robotics
The past decade has witnessed considerable growth in the commercial use of robots, which have found increasing applications in manufacturing, assembly, packaging and transport, earth and space exploration, surgery, and weaponry. These robots come in forms that mimic humans (ASIMO, Nao), forms that mimic animals (BigDog), forms that mimic natural principles (swarm robots), and forms that have no basis in nature (manufacturing robots). Whatever the shape, the large majority of current robots consist of hard parts—typically made of metal—that are actuated by electrical motors or pneumatic or hydraulic systems. But there are circumstances in which robots consisting of soft parts would be advantageous; for example, soft end-effectors could better handle fragile objects, and a soft-bodied robot could better maintain balance while moving across unknown, irregular terrain.
In response, the research group headed by George Whitesides at Harvard has pioneered the field of soft robotics, drawing on nature for inspiration, such as the tentacles of squid or the trunk of an elephant for object manipulation, and the octopus and starfish for examples of effective locomotion over variable terrain.20–22 The methodology developed by the Whitesides group over the last few years relies on microchannels and chambers fabricated in soft, elastomeric material. When air is pumped into these embedded pneumatic networks, the surrounding material inflates. By fabricating these pneumatic networks closer to the top surface of the surrounding elastomeric layer than the bottom surface, when air is pumped in, the top surface expands more than the bottom surface, causing the layer to curl downward. Similarly, if an elastomeric layer containing a pneumatic network is bonded on top of an elastomeric layer without an embedded network, actuation of the network in the top layer will cause the composite to curl downward. In these ways, the researchers achieve directional and controllable movement of the elastomeric material.
Obviously, robotic components made entirely of elastomer and air are extremely cheap relative to their more traditional, hard counterparts. But what can such soft robotics do? As the Whitesides research group has demonstrated: quite a lot. As an example of a soft end-effector, take the starfish-like structure shown in Fig. 5.20 The structure consists of three layers bonded to form the composite structure: the top layer is made of the flexible polymer EcoFlex and contains embedded pneumatic networks; the middle layer is made of the less flexible polymer PDMS; and the bottom layer is made of EcoFlex and its surface is patterned with ridges to facilitate gripping. When the pneumatic network of the top layer is actuated by air pumped in through a tube (visible in Fig. 5), the composite structure bends downward, enabling it to grip fragile and/or irregularly shaped objects like the uncooked egg in Fig. 5. This soft end-effector is compliant and does not concentrate stress, enabling it to grip delicate objects without the need for feedback sensors.
Fig. 5.
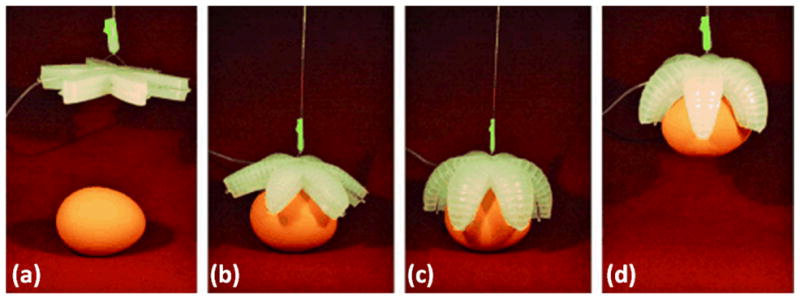
Starfish-like structure of layered elastomeric materials. (a–d) Actuation of the pneumatic network embedded in the topmost layer of the structure causes the structure to curl downward, enabling gripping of an uncooked egg; grip is sufficient to support the weight of the egg upon lifting of the end-effector. Image reproduced from Ref. 20.
To demonstrate the use of soft robotics to achieve adjustable robot locomotion—all without the need for multicomponent mechanical joints with complex sensors and electronics—the Whitesides research group created the four-legged soft robot shown in Fig. 6.21 The robot is fabricated using the same techniques previously described: a series of pneumatic networks is fabricated in an EcoFlex polymer layer using soft lithography, and this is bonded on top of a thin layer of less-flexible PDMS. Air can then be pumped individually into the pneumatic networks of the four legs and the “spine”, causing the actuated part of the robot to curl downward and generating force sufficient to lift the robot off the ground. Using computer-controlled solenoid valves, the pneumatic networks of the legs and spine can be pressurized/depressurized in sequences that achieve differing locomotion modes. This very simple concept was used to pass the soft robot under a vertically oriented plate of glass raised 2 cm off the ground. Fig. 6(a)-(h) show the robot navigating the obstacle, whose bottom edge is indicated by the dashed white line.
Fig. 6.

Four-legged soft robot made of layered elastomeric materials, with separate pneumatic networks embedded in the spine and each of the legs. (a)–(h) Pressurization/depressurization of these embedded networks in strategic sequences moves the robot, and enables the robot to pass under a vertical plate of glass raised 2 cm off the ground (bottom edge indicated by the dashed white line). Image reproduced from Ref. 21.
Conclusion
Over the past two decades, microfluidics has been harnessed for innovations in the biomedicine/chemistry fields (e.g., medical diagnostics, analytical chemistry). However, very recently, some researchers have begun demonstrating uses for microfluidics outside the “lab-on-a-chip” paradigm. In this Focus article, we have highlighted some of the most interesting instances of such “unconventional” microfluidics: temporary button features for touchscreen displays, liquid metal-filled microchannels used for RF antennas and capacitive tactile sensors, stretchable and self-healing microfluidic wires made from self-healing polymers, and soft robots that use embedded pneumatic networks to achieve complex movements without complex joints. There are other instances of unconventional microfluidics, but these examples suffice to demonstrate what can be achieved when microfluidic techniques are creatively applied in unexpected ways. Researchers can continue thinking more expansively about microfluidics; they can start mingling it with untried disciplines. And further “unconventional” innovations are sure to result.
Acknowledgments
This research was supported by National Institutes of Health (NIH) Director’s New Innovator Award (1DP2OD007209-01).
References
- 1.Whitesides GM. Nature. 2006;442:368–373. doi: 10.1038/nature05058. [DOI] [PubMed] [Google Scholar]
- 2.Manz A, Graber N, Widmer HM. Sens Actuators. 1990;B1:244–248. [Google Scholar]
- 3.Mao X, Huang TJ. Lab Chip. 2012;12:1412–1416. doi: 10.1039/c2lc90022j. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 4.Li P, Stratton ZS, Dao M, Ritz J, Huang TJ. Lab Chip. 2013;13:602–609. doi: 10.1039/c2lc90148j. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 5.Zhao Y, Stratton ZS, Guo F, Lapsley MI, Chan CY, Lin SCS, Huang TJ. Lab Chip. 2013;13:17–24. doi: 10.1039/c2lc90127g. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 6.Neuzil P, Giselbrecht S, Länge K, Huang TJ, Manz A. Nat Rev Drug Discovery. 2012;11:620–632. doi: 10.1038/nrd3799. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 7.Palleau E, Reece S, Desai SC, Smith ME, Dickey MD. Adv Mater. 2013 doi: 10.1002/adma.201203921. [DOI] [PubMed] [Google Scholar]
- 8.Cheng S, Wu Z. Lab Chip. 2010;10:3227–3234. doi: 10.1039/c005159d. [DOI] [PubMed] [Google Scholar]
- 9.Cheng S, Wu Z. Lab Chip. 2012;12:2782–2791. doi: 10.1039/c2lc21176a. [DOI] [PubMed] [Google Scholar]
- 10.Leber Jessica. A Shape-Shifting Smartphone Touch Screen. technologyreview.com[Online] Available from http://www.technologyreview.com/demo/508106/a-shape-shifting-smartphone-touch-screen/
- 11.Das Sumi. A keyboard that rises up from flat touch screems. news.cnet.com[Online] Available from http://www.news.cnetcom/8301-1035_3-57569078-94/a-keyboard-that--rises-up-from-flat-touc-screens/
- 12.Tactus Technology. [Online] Available from: http://www.tactustechnology.com/
- 13.Wu A, Wang L, Jensen E, Mathies R, Boser B. Lab Chip. 2010;10:519–521. doi: 10.1039/b922830f. [DOI] [PubMed] [Google Scholar]
- 14.Puangmali P, Althoefer K, Seneviratne LD, Murphy D, Dasgupta P. IEEE Sensors Journal. 2008;8:371–381. [Google Scholar]
- 15.Wong RDP, Posner JD, Santos VJ. Sens Actuators, A. 2012;179:62–69. [Google Scholar]
- 16.Wool RP. Soft Matter. 2008;4:400. doi: 10.1039/b711716g. [DOI] [PubMed] [Google Scholar]
- 17.Wu DY, Meure S, Solomon D. Prog Polym Sci. 2008;33:479–522. [Google Scholar]
- 18.Blaiszik BJ, Kramer SLB, Olugebefola SC, Moore JS, Sottos NR, White SR. Annu Rev Mater Res. 2010;40:179–211. [Google Scholar]
- 19.Cordier P, Tournilhac F, Soulié-Ziakovic C, Leibler L. Nature. 2008;451:977–980. doi: 10.1038/nature06669. [DOI] [PubMed] [Google Scholar]
- 20.Ilievski F, Mazzeo AD, Shepherd RF, Chen X, Whitesides GM. Angew Chem Int Ed. 2011;50:1890–1895. doi: 10.1002/anie.201006464. [DOI] [PubMed] [Google Scholar]
- 21.Shepherd RF, Ilievski F, Choi W, Morin SA, Stokes AA, Mazzeo AD, Chen X, Wang M, Whitesides GM. Proc Natl Acad Sci USA. 2011;108:120400–20403. doi: 10.1073/pnas.1116564108. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 22.Morin SA, Shepherd RF, Kwok SW, Stokes AA, Nemiroski A, Whitesides GM. Science. 2012;337:828–832. doi: 10.1126/science.1222149. [DOI] [PubMed] [Google Scholar]