

Abstract
Implantable systems for biomedical research and clinical care are now a flourishing field of activities in academia as well as industrial institutions. The broad field includes experimental explorations in electronics, mechanical, chemical, and biological components and systems, and the combination of all these. Today virtually all implants involve both electronic circuits and micro-electro-mechanical-systems (MEMS). This article offers a very brief glance back at the early history of implant electronics in the period from the 1950s to the 1970s, by employing selected examples from the author’s research. This short review also discusses the challenges of implantable electronics at present, and suggests some potentially important trends in the future research and development of implantable microsystems. It is aimed as an introduction of implantable/attached electronic systems to research engineers that are interested in implantable systems as a section of Biomedical Instrumentations.
General Terms: Design, Algorithms, Performance
Additional Key Words and Phrases: Implantable electronics, implantable microsystems, biomedical micro-electro-mechanical systems (MEMS), radio-frequency (RF) wireless powering, micropackage, nonhermetic package
1. INTRODUCTION
Implantable systems represent an important technique of biomedical instrumentation for sensing body information or soliciting body reaction within living organs to remote locations through wireless communication links. Figure 1 shows the conceptual diagram of an implant system (Figure 1(a)) and the essential blocks of a typical implant device (Figure 1(b)). In Figure 1(a), the circle is the body and the rectangular block is the external equipment. The implant systems can function as telemetry (remote or tele-sensing) or tele-actuation. Linking both together it is a closed loop remote control system. It may be all electronic or may have parts of the implant be mechanical, chemical or biological. Most implantable electronic devices have same essential blocks whether the implant device is for sensing, actuating, or closed loop control. In implantable telemetry devices, the sensors convert the biological and/or physiological parameters into electrical signals that are processed by the interface electronics then transmitted by radio-frequency (RF), or other wireless means links to an external receiver and recording or processing facilities. In implantable actuation devices, the external command unit sends commands through the wireless links; the signals are processed by the interface electronics to drive the actuators that perform functions with the body organs. For implant electronic systems, the actuators are the stimulators that send electrical currents to the muscles or nerves through stimulating electrodes that solicit desired body reaction. In implant electronic control systems, the telemetry units and the stimulating units are linked to control specific body functions to desired levels. The sensor/stimulator, the electronics and the wireless communication link are located totally within the organism of the body. The location may be intracavity, such as within the intestines, mouth, or bladder, or may be inside the internal or external surfaces of the body—subcutaneous or deep within tissue.
Fig. 1.
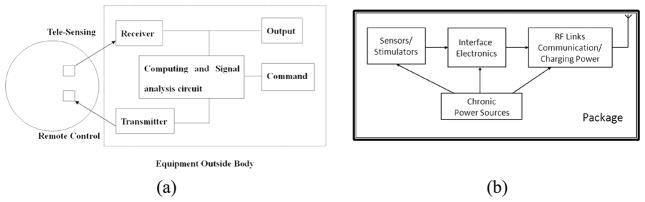
(a) The conceptual diagram of an implant system; and (b) the essential blocks of an implantable device. © Wen Ko, 2012.
Implantable electronic systems are valuable instruments for life science research, as well as medical care. Telemetry systems can be used for monitoring and diagnosis, such as electrocardiography (ECG) and blood pressure monitoring. Stimulation systems are used for therapy and treatment, such as the cardiac pacemaker. Closed loop systems are used for prosthesis, automated health care, and prevention such as variable rate heart pacemaker that can adjust heart rate according to the oxygenation level in the blood or the activity of the body.
2. HISTORY OF IMPLANT ELECTRONICS FROM THE 1950S TO THE 1970S
Although radio transmission of analog signals has been known since 1844 [Prescott 2009] and frequency-modulation radio links have been used to transmit pneumograms since 1948 [Gordon and Fuller 1948], extensive development of biomedical implant electronic techniques did not really get started until the transistor was invented in 1948 and made commercially available after 1954. The comparatively small size and power consumption of this new device made possible the construction of practical telemetry transmitters for implant measurement. Since then, the advances in solid-state devices and microelectronics have further enhanced the development of implant telemetry and stimulation into a field of research in instrumentation. In the late 1950s and early 1960s Mackay Noller, Wolff Zworykin, and others developed active radio-transmitting units for use in the gastrointestinal tract and other cavities of the body [Mackay 1959]. Subcutaneous and deep-body implantation of telemetry units was initiated by Essler, Ko, Mackay, Young, and others to measure physiologic information in animals as well in humans [Ko and Neuman 1965]. For a historical review of these and other areas of biomedical telemetry please refer to the surveys by Ko and Neuman [1965], Caceres [1965], Slater [1963], Amlaner and Macdonald [1986], and Hambrecht and Reswick [1977].
The earliest telemetry electronic circuits are shown in Figure 2. Figure 2(a) is the Mackay’s blocking oscillator circuit used to telemeter body temperature or other narrow bandwidth body signals sensed by the sensors R or C1. It is simple, robust, and requires very low power. This circuit was modified and improved and used extensively in biological field research. A collection of Biotelemetry works for radio tracking up to 1975 is given in Amlaner and Macdonald [1986]. Figure 2(b) is the Ko’s tunnel diode telemetry circuit with bridge sensor input.
Fig. 2.
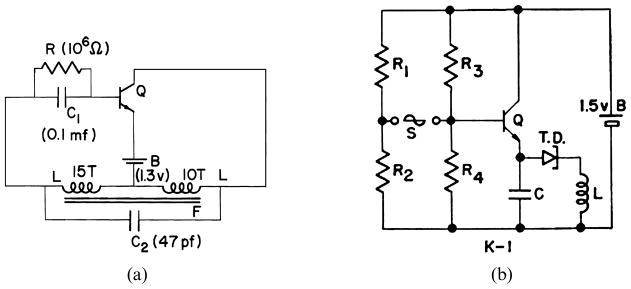
Two Implantable telemetry circuits of the era of 1960. (a) Mackay–Blocking Oscillator, 1958 [Mackay 1959]; (b) Ko–Tunnel Diode Telemetry Unit, 1961 [Ko and Neuman 1965]. © Wen Ko, 2012.
Historically, the development of implant electronic system started with telemetry, then stimulation, then closed-loop control. In the periods between 1960 to 1975, a number of design approaches were studied and many biomedical applications were explored. However due to the limitations in microelectronics technology and materials only the radio tracking [Amlaner and Macdonald 1986] was fully developed for the field biology. In the medical field, several demonstrative projects were successfully tried; however, none of them reached commercialization stage except the cardiac pacemaker. The explored applications and a few examples of the results from the author’s team are shown in this article.
2.1 Telemetry
Miniaturized low-power low-bandwidth telemetry transmitters were developed and packaged with Hysol Epoxy and medical grade silicone for short-term implants. Macor ceramic flat-packs and glass capsules were used for longer term implants. The typical volumes of these devices are in the range of 1 cm3, and the power levels are from milliwatts to microwatts. They are intended for biomedical monitoring and diagnosis. Specifically, such applications include (i) physiology research using small animal models; (ii) system biology study; (iii) patient monitoring in the hospital; and (iv) response and progress of treatment; (v) preventive monitoring and early warning. Figure 3 shows three of the telemetry transmitters that were used for many of these applications from 1961 to 1975 [Ko 1960, 1961, 1962; Ko and Neuman 1965].
Fig. 3.
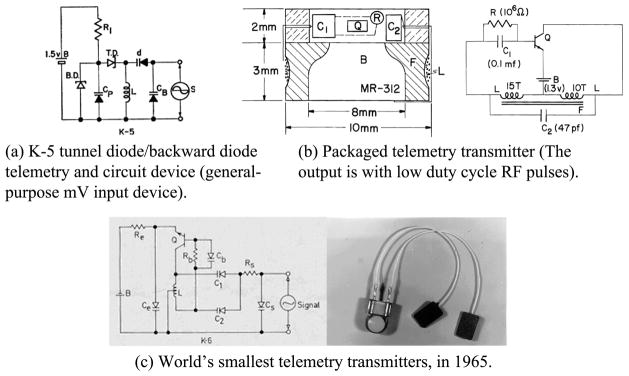
Three examples of early telemetry transmitters. © Wen Ko, 2012.
2.2 Stimulation
The peripheral and central nerve system in body can be stimulated by electrical current to act or to blocked signal transmission thus to inhibit related functions. The theory and applications of functional electrical stimulation were developed at the Engineering Design Center (EDC), Case Institute of Technology during 1960–70 [Hambrecht and Reswick 1977]. Many research groups followed up and tried various applications of the functional stimulations. Examples include (i) Cardiac pace maker and defibrillation devices; (ii) Electrical pain suppression; (iii) Implant middle ear and cochlear hearing aids; (iv) Visual prosthesis, (with multi-electrodes on the forehead or on the visual cortex surface); (v) Diaphragm pacing for respiration; (vi) Epileptic seizure control; (vii) Hand and aim control for spinal cord injured, (viii) Leg and foot control for walking; and (ix) Emotion control of monkey and other animal models.
A typical single-channel electrical stimulation circuit is shown in Figure 4, where the “K-5” unit is a feedback circuit used to check on the electrode current delivered to the electrode. Multiple-channel stimulator units were developed for some applications. There are hundreds of pieces of literature on functional electrical stimulation searchable today. The stimulating electrodes and the flexible leads from the stimulator circuit to the stimulation sites are difficult problems for long-term implants. Many studies were made in the literature. Improvements/studies are still needed today [Hambrecht and Reswick 1977; Peckham et al. 1981].
Fig. 4.
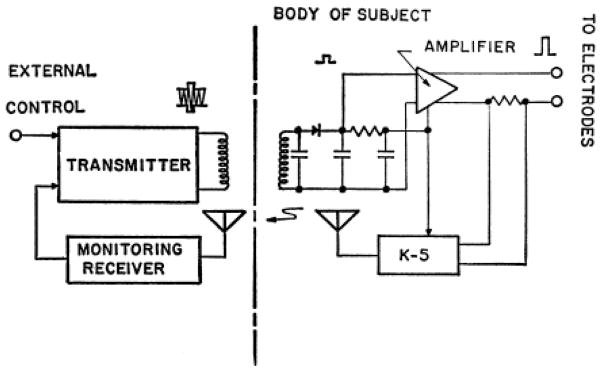
A single channel functional electrical stimulation circuit. © Wen Ko, 2012.
2.3 Implant Electronic Control Systems
Many implant Control systems were studied by adding a feedback telemetry circuit to monitor the status of the stimulation response, and to adjust the command such as in the on-demand pacemaker, or to telemeter consciously controlled signals as the command, such as the electromyography (EMG) controlled hand prosthesis.
Control systems studied include (i) Paralyzed limb control for upper and lower extremities; (ii) Drug infusion control; (iii) Organ function regulation, such as heart, lung pacing; (iv) Biological research; and (v) Other control systems. Demonstrative projects were tried but the practical use of these systems takes long years continued work. Figure 5 is the arm aid system proposed in 1960 at EDC at Case Institute of Technology and only partially in actual use at the present. Figure 6 is a demonstration of EMG controlled limb movement. Therein, a K-6 telemetry unit was implanted under the skin of Dr. Vodovnik. The EMG signal of his shoulder muscle was sent to a FM receiver nearby as the command signal. And an electrical stimulation unit was implanted in the dog’s rear leg muscle. The EMG signal from Dr. Vodovnik was then used to control the up and down of the leg of the dog. Similar experiments were performed to use EMG signal to control the speed of a motor. These experiments demonstrated the feasibility of a thought-controlled machine, or brain-controlled environment [Grotz et al. 1964; Lorig et al. 1967].
Fig. 5.
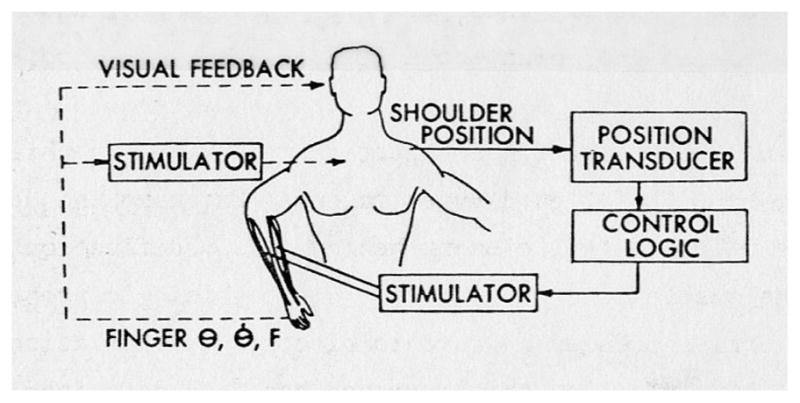
Proposed arm aid system of 1960. © Wen Ko, 2012.
Fig. 6.

Human EMG implant controls dog’s leg motion. © Wen Ko, 2012.
3. IMPLANT SYSTEM REQUIREMENTS AND CHARACTERISTICS
Implant devices have to be able to operate in a very harsh environment. The body fluid is highly conductive and corrosive. All foreign subjects in the body are attacked by antigen and other biochemical reactions in the body. At the same time, the implant may cause inflammation and other toxic reactions on tissues around the implant. Therefore, the materials used for the implant should be nontoxic and proper package shall protect the implant, the tissue and the host body from any harmful reactions.
Implant operation is expensive and time consuming. The implant device would take a long time to reach stable operation after the device is implanted. Therefore, when designing implant systems, the reliability is more important than many quality factors such as broad band response and large sensitivity margin, etc. The biological rhythm is generally in seconds or fractions of a second. Therefore, the biomedical signal bandwidth is usually from 0.01 to 10 kilohertz.
For long-term implant with lifetime from months to years, the basic requirements are: (i) the volume and weight of the packaged implant device shall be smaller and light so that the device would not affect the normal activity of the host. It is generally agreed that 2% of the host body size and weight are the upper limit; (ii) the implant shall not contain any toxic or harmful materials and the package shall be able to protect the body and the implant to assure its biocompatibility; (iii) the implant system—implant and the external unit—shall be reliable and easy to operate by nontechnical biomedical personnel.
4. DESIGN APPROACHES OF IMPLANT ELECTRONIC DEVICES
In the design of long lifetime implant electronic systems to meet the size, weight, and other requirements, all the building blocks in Figure 1(b) need to be considered. The largest and heaviest blocks are the chronic power supply, and the biocompatible package. They are the most difficult problems, persisting from the early times till present.
With the advances of large-scale integrated circuits and MEMS, the interface electronics and the RF link can be designed to achieve minimal size and weight. However, several approaches were developed in the early periods that may still be of interest today. A few examples follow.
The low duty cycle pulse frequency or pulse position modulated RF approach will greatly reduce the RF power consumption by a factor nearly equals to the duty cycle, which can be of 10–2 to 10–5 in magnitude [Ko et al. 1970].
Use low voltage electronic devices such as tunnel diodes to share the battery voltage with transistors as shown in Figure 7 where the 2-channel telemetry unit has the 1.35V battery shared by a transistor and 2 tunnel diodes in series.
Single-antenna, two-frequency RF powering and transmission circuit as shown in Figure 8 When receiving power, there is no modulator signal; Q2 and C1 are open circuited. The FET Q1 acts as a diode, with L and stray capacitance tuned to the RF powering frequency. When an input signal is present from the modulator, Q2 turns on, Q1, Q3 function as an oscillator at the frequency determined by L and C1, C2 in series. The modulator signal is transmitted [Hynecek and Ko 1975].
The RF power receiving coils—as shown in Figure 9; a three-dimension RF power receiving unit can receive power from an RF driver with any space orientation, thus increases the power transfer efficiency when the host body is moving related to the driving coil. High-efficiency, high-power RF power transfer also can be achieved by using ferrite cores to focus the driving magnetic field to the implant receiving coil.
Fig. 7.
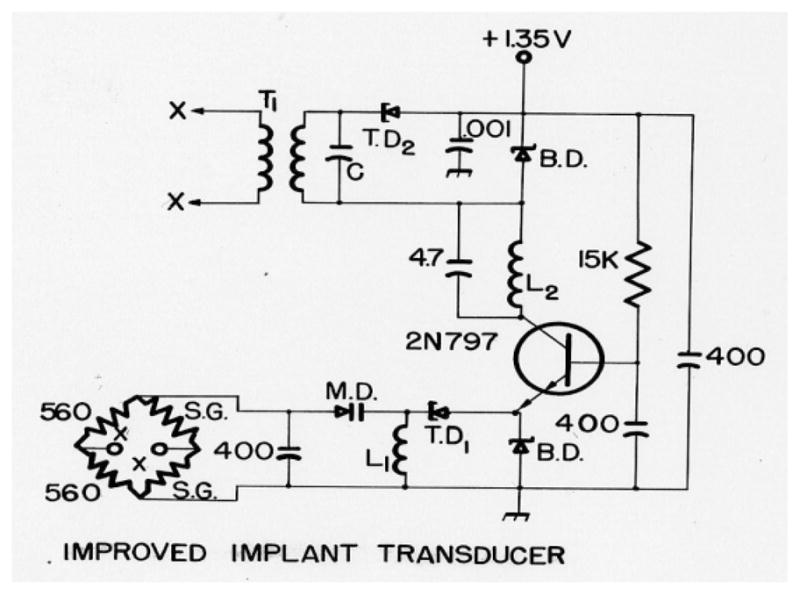
Two tunnel diode subcarrier oscillators share the 1.35V battery with a transistor. © Wen Ko, 2012.
Fig. 8.
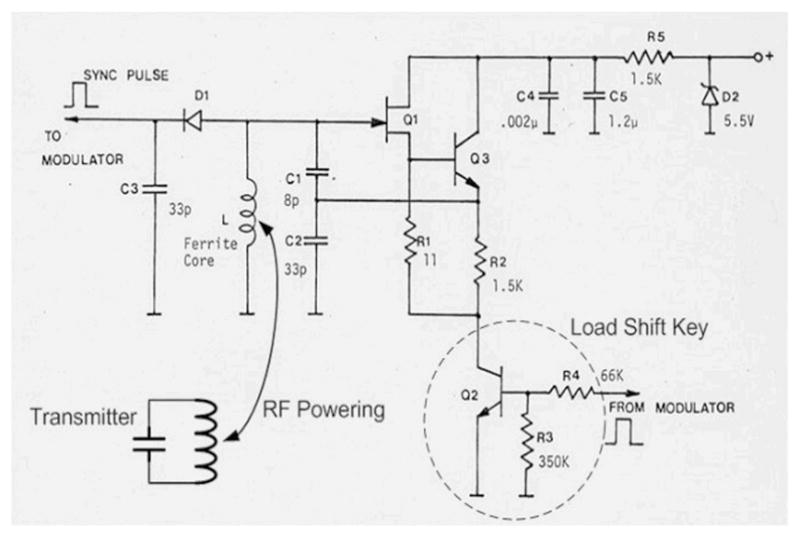
The single antenna two-frequency RF-communication link circuit. © Wen Ko, 2012.
Fig. 9.
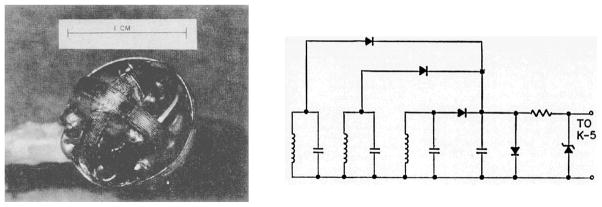
The three-dimension RF power receiving coil structure and circuit diagram. © Wen Ko, 2012.
5. CHALLENGES OF IMPLANTABLE/ATTACHED ELECTRONICS
The major challenges of implantable or surface attached electronic systems, 50 years ago and at the present, are the same. They are the minimum size and weight of: chronic power supply, the package, and the transducers (sensor and the stimulator electrodes) integrated with signal processing electronics.
5.1 Chronic Power Supply
The power-supply challenge is to have small batteries with low internal impedances for fast recharge and large transient output current. The super-capacitors and the lithium thin film batteries developed recently can be improved to satisfy the present needs of energy storage. The high efficiency wireless charging techniques are challenges. The wireless charging can be accomplished by RF, ultrasound, infrared light, low-frequency magnetic field, and other means. The implantable body energy harvesting sources and distributions of harvested energy in the body are interesting topics and challenges for research. The long lifetime energy sources such as low energy nuclear power source also would be interesting to explore [Hynecek and Ko 1974].
5.2 Micropackage of MEMS Implantable Systems
The function of package of implantable systems is to protect the host body and the implant device from harm. In order to protect the host body, there are a few important requirements and challenges: (i) the implant should not have any toxic material and is sterilized; (ii) the surface of the implant should be biocompatible so that the implant will not irritate surrounding tissues; (iii) the implant surface temperature should not be much higher than the tissue temperature (less than 2°C difference); and (iv) the specific gravity of the implant should be close to that of the surrounding [Ko and Spear 1983, 1995].
In order to protect the implant device the package should satisfy the following: (i) protect the implant from water vapor and ionic chemicals to permeate through to cause current leakage and low resistance paths that degrade the function of the electronics; (ii) protect the implant from mechanical damages in the body or during the implant operation, and (iii) insure the proper function of the implant over the desired lifetime.
The hermetic packages use hermetically sealed metal, ceramic and glass boxes with biocompatible material outer coating, which can have very long lifetimes, but generally are large and expensive And have the problems of feed-through and protection of sensors that need to be in contact with body fluid. The nonhermetic packages use polymeric materials such as epoxy, silicone, parylene, and others as coating materials. They can be low-cost, “simple”, and can be made small in volume and weight, but the lifetime is shorter. There are studies on non-hermetic packages of MEMS implant electronics that may have implant lifetimes from several months to several years. However, the theory and technology needs to be developed and proven for reliable micropackage. The development of micropackage technology to have package volume and weight less that the unpackaged implant device and a lifetime of 2 to 10 years remains to be a great challenge [Nicholas 1994; Wong 1998; Bu et al. 2009].
5.3 Micro/Nano-Watt Electronic Circuits and Transducers
Although MEMS transducers and integrated circuits technologies have reduced the sizes and power consumption by orders of magnitude than devices of 50 years ago; the developing MEMS/NEMS technology should be used to further reduce the size of transducers and to integrate transducer with ASIC. The reduction of size and power consumption of implant electronics block is a challenge now.
The power consumption per telemetry channel for 1 kHz bandwidth is about 1–5 microwatt at the present. The small MEMS implantable device has a volume about 1–5 cm3. If the MEMS/NEMS technologies can be developed to reduce the power per telemetry channel by 2 orders of magnitude to 10 nanowatt level, (including using electronic devices that require supply voltage less than 0.2–1.0 volt), then the energy storage component and the implant electronics device can also be reduced in volume and size by 2 to 3 orders of magnitude, from 1 cm3 to a few mm3, with same lifetime. Many future applications of implant systems would be made possible. The challenge in nano-powered transducers and electronics is upon us now.
6. PROGRESS AND TRENDS
From 1960 to 2011, the implantable electronics systems have made tremendous progress. The MEMS and NEMS technology, the miniaturized transducers (sensors, actuators and electrodes), and the large-scale integrated circuits have cleared the barriers for practical implantable microsystems. the wireless remote monitoring and control systems has propagated from biomedical research and aerospace exploration to clinical health care, to industrial, environmental, and social communication fields. Short range RF links (powering and signal transmission) is everywhere in our daily life. The literature is too many to be comprehensively sampled in this short article. at the same time, recent literature can be searched conveniently. Therefore, the progresses of implantable systems after the early exploration period are not included in this short article, except in packaging, the long underemphasized area in implantable systems.
Based on discussions with researchers interested in implantable systems for biomedical research and health care, it is suggested that the trends of future implantable and attachable electronic systems for biomedical applications may include systems for the following.
Individualized Medical Health Care. Wearable or safe and simple implantable systems would be developed so that normal baseline health information can be recorded while the person resumes daily activities. Deviations from the individualized norm would initiate preventive actions to avoid serious medical problems from developing.
Wearable and Online Monitor and Warning System. Medical information collection and warning as well as some remotely controlled treatment can be accomplished through wearable or implantable mobile systems.
On-Organ Monitoring and Therapeutic Devices. When the implantable device is small (in the range of several mm3), and reliable, the on-organ monitoring and therapeutic devices could be developed—such as on the heart pacemaker and de-fibrillator, powered by the heart energy; or on-the-liver, on-the-kidney function monitors, etc.
Closed-Loop Control Systems for Surgery, Diagnosis and Therapy. Implantable and attachable electronic systems can be useful instruments in delicate surgery and medical care fields.
Larger Scale Multiple Channels (1000 channels and up). Brain-machine interconnected network for research, diagnosis and treatment of body malfunction.
Sensory prostheses and artificial organs. Such as artificial eye, heart, lung, liver, pancreas, etc.
References
- Amlaner CG, MacDonald DM, editors. A Handbook on Biotelemetry and Radio Tracking. Pergamum Press; New York: 1986. [Google Scholar]
- Bu LP, Cong P, Kuo HI, Ye XS, Ko WH. Micro package of short term wireless implantable microfabricated systems. Proceedings of the IEEE EMBC Annual Conference; 2009. pp. 6395–6399. [DOI] [PubMed] [Google Scholar]
- Caceres CA, editor. Bio-medical telemetry. Academic Press; New York: 1965. p. 60. [Google Scholar]
- Gordon TM, Fuller JL. The radio inductograph – a device for recording physiological activity in unrestrained animals. Science. 1948;108:287. doi: 10.1126/science.108.2802.287. [DOI] [PubMed] [Google Scholar]
- Grotz RC, Yon ET, Long C, Ko WH. Intramuscular FM radio transmitter of muscle potential. Proceedings of the Congress of Physical Medicine and Rehabilitation; 1964. [PubMed] [Google Scholar]
- Hynecek J, Ko WH. Implant evaluation of a nuclear power source-betacell battery. IEEE Trans BME. 1974;21(3):238–241. doi: 10.1109/TBME.1974.324388. [DOI] [PubMed] [Google Scholar]
- Hynecek J, Ko WH. Single frequency RF powered telemetry system. Proceedings of the 28th Annual Conference on Engineering in Medicine and Biology.1975. [Google Scholar]
- Hambrecht FT, Reswick JB, editors. Functional Electrical Stimulation: Applications in Neural Prostheses. Marcel Dekker; New York: 1977. [Google Scholar]
- Ko WH. Tunnel diode FM wireless microphone. Electronics. 1960;11/60 [Google Scholar]
- Ko WH. Designing tunnel diode oscillators. Electronics. 1961;2/61 [Google Scholar]
- Ko WH. Tunnel diode oscillator delivers RF and audio. Electronics. 1962;35(41):56. [Google Scholar]
- Ko WH, Neuman MR. Implant biotelemetry and microelectronics. Science. 1965;156:773, 351. doi: 10.1126/science.156.3773.351. [DOI] [PubMed] [Google Scholar]
- Ko WH, Spear TM. Packaging materials and techniques for implantable instruments. Engineering in Medicine and Biology. 1983;2:24–38. [Google Scholar]
- Ko WH, Spear TM. Packaging of micro-fabricated devices and systems. Mat Chem Phys. 1995;42:169–175. [Google Scholar]
- Ko WH, Yon ET, Hynecek J. Micropower pulse modulated telemetry transmitter. Proceedings of the 23rd Annual Conference on Engineering in Medicine and Biology; 1970. p. 119. [Google Scholar]
- Lorig RJ, Reswick JB, Vodovnik L. An implantable system for the myo-electric stimulation of skeletal muscle using Radio frequency links. Proceedings of the 20th Annual Conference on Engineering in Medicine and Biology.1967. [Google Scholar]
- Mackay RS. Radio telemetry from within the human body. IRE Inst Trans Med Electron ME-6. 1959:100–105. [Google Scholar]
- Nicholas MF. The challenges for hermetic encapsulation of implanted devices – A review. Biomed Eng. 1994;22(1):39–67. [PubMed] [Google Scholar]
- Peckham PH, Poon CW, Ko WH, Marsolais EB, Rosen JJ. Multichannel implantable stimulator for control of paralyzed muscle. IEEE Trans Biomed Eng BME. 1981;28(7):530–536. doi: 10.1109/TBME.1981.324740. [DOI] [PubMed] [Google Scholar]
- Prescott GB. Bell’s Electric Speaking Telephone: Its Invention, Construction, Application, Modification, and History. Appleton; New York: 2009. p. 72. [Google Scholar]
- Slater L. Bio-Telemetry. Pergamon; New York: 1963. Survey on implant biotelemetry. [Google Scholar]
- Wong CP. Polymers for encapsulation: Materials processes and reliability. Chip Scale Rev. 1998:2. [Google Scholar]