

Abstract
This investigation examined how children and adults negotiate a challenging perceptual-motor problem with significant real-world implications – bicycling across two lanes of opposing traffic. Twelve- and 14-year-olds and adults rode a bicycling simulator through an immersive virtual environment. Participants crossed intersections with continuous cross traffic coming from opposing directions. Opportunities for crossing were divided into aligned (far gap opens with or before near gap) and rolling (far gap opens after near gap) gap pairs. Children and adults preferred rolling to aligned gap pairs, though this preference was stronger for adults than for children. Crossing aligned versus rolling gap pairs produced substantial differences in direction of travel, speed of crossing, and timing of entry into the near and far lanes. For both aligned and rolling gap pairs, children demonstrated less skill than adults in coordinating self and object movement. These findings have implications for understanding perception-action-cognition links and for understanding risk factors underlying car-bicycle collisions.
Keywords: affordances, road crossing, perceptual-motor development, virtual environments
Misjudging whether it is safe to proceed across a busy intersection can carry significant negative consequences, particularly for pedestrians and bicyclists. Motor vehicles are involved in approximately one-third of all bicycle-related brain injuries and in 90% of all fatalities resulting from bicycle crashes (Rivara & Aitken, 1998; Acton et al., 1995). Many of these collisions occur at intersections (Ashbaugh et al., 1995; Wachtel & Levinston, 1994). Children and adolescents between the ages of 5 and 15 are overrepresented in the bicycle crash data, having the highest rate of injury per million cycling trips (Rivara & Aitken, 1998). Past research on children's road-crossing behavior has shown that child pedestrians and cyclists are less proficient than adults at road crossing (Barton & Schwebel, 2007; Lee, Young, & McLaughlin, 1984; Pitcairn & Edlmann, 2000; Plumert, Kearney, & Cremer, 2004; Plumert, Kearney, Cremer, Recker, & Strutt, 2011; te Velde, van der Kamp, Barela, & Savelsbergh, 2005). To date, most studies have focused on how children's gap selection and crossing performance compares to that of adults when crossing a single lane of traffic. In the real world, however, pedestrians and cyclists frequently cross multiple lanes of traffic, often coming from opposing directions. Integrating information about multiple opposing streams of traffic is a significantly more challenging perceptual-motor task, and may be especially difficult for children. This is particularly true on busy roads, where pedestrians and cyclists are more likely to take small gaps rather than wait for larger gaps (Guth, Ashmead, Long, Wall, & Ponchillia, 2005; Plumert et al., 2011). In this paper, we examine how young adolescent and adult cyclists solve the challenging problem of crossing two lanes of opposing cross traffic in an immersive, interactive bicycling simulator.
Road Crossing As a Perceptual-Motor Task
Our approach to understanding the processes underlying road-crossing behavior starts with considering road crossing as a perception-action task with two main components. The first is to determine if a given gap in traffic affords safe crossing. The second component is to coordinate movement through the selected gap without colliding with any vehicles. Further, our approach views these two components as intertwined – gap choices constrain crossing actions, and action capabilities constrain gap choices. Below, we discuss the physical and psychological constraints on gap selection and crossing behavior when bicycling across single and multiple lanes of traffic. Note that although our focus is on cycling, many of the same constraints (though not all) apply whether one is walking, bicycling, or driving. For example, although walking and bicycling are two very different modes of locomotion, the selection a gap for crossing in both situations is based on the same underlying processes for judging whether a given gap affords safe crossing.
Gap Selection
Crossing a single lane of traffic first entails finding a gap that affords safe crossing. A gap affords crossing if the cyclist's (projected) crossing time is less than the temporal size of the gap (Lee et al. 1984):
| (1) |
Here TLead and TTail correspond to the arrival times of the first and second vehicles to the planned crossing line, d is distance to be traversed, and v is the rider's average speed. To cross safely, cyclists must accurately judge both the size of the temporal gap and the amount of crossing time required.
Recent work on gap selection has focused on how child and adult cyclists cross a single lane of traffic in an immersive, interactive virtual environment (Plumert et al., 2004; 2011). In these studies, 10- and 12-year-olds and adults rode an instrumented bicycle through a virtual environment consisting of a straight, residential street with multiple intersections. Participants faced continuous cross traffic coming from the left-hand side, consisting of randomly ordered temporal gaps between cars (some crossable and some uncrossable). Their task was to cross each intersection without getting hit by a car. A robust finding from this work is that 10- and 12-year-olds and adults chose the same size gaps for crossing. However, children ended up with less time to spare than adults when they cleared the path of the oncoming car. Although crossing times did not differ between children and adults, children delayed initiation of movement, which resulted in less time to spare.
Judging gap affordances when crossing multiple lanes of opposing cross-traffic is a considerably more challenging task than crossing a single lane, due to the fact that the rider must select a pair of gaps composed of a near lane gap and a far lane gap that in combination afford safe crossing. This means that each gap in the selected pair must individually be sufficiently large to allow safe crossing of the corresponding lane. Furthermore, because the rider must be able to move from the near lane into the far lane of traffic while both gaps are open simultaneously, the spatio-temporal relationship between the gaps in the pair is critical in determining whether a safe crossing is possible. Estimating how the near and far lane gaps will overlap is greatly complicated by the fact that the gaps approach from opposite directions and cannot be simultaneously observed. This means that riders have to integrate visually available and remembered information about the estimated arrival times of the two gaps to judge whether a pair of gaps affords safe crossing. Past work has shown that errors in estimated arrival times increase rapidly after objects have disappeared from view (DeLucia & Liddell, 1998; Schiff & Oldak, 1990). Moreover, when two objects are launched together, observers can accurately predict the time-to-contact (TTC) of one object but systematically overestimate the TTC of the other object (Baures, Oberfeld, & Hecht, 2010, 2011). Together, this work suggests that keeping track of multiple gaps that cannot simultaneously be observed is likely a difficult task.
Using notation similar to Lee's, a gap pair is crossable when the temporal sizes of the near and far lane gaps are larger than the projected crossing times for the corresponding lanes and the overlap is large enough for the rider to move from the near lane into the far lane:
| (2) |
where TNearLead, and TFarLead denote arrival times for the rear bumpers of the lead vehicles in the near and the far lane gaps respectively, TNearTail and TFarTail denote arrival times for the front bumpers of the tail vehicles in the near and the far lane, v is the average speed of the rider, dnear and dfar are the distances the rider must travel to cross the near and far lanes, drider is the length of the bicycle, and d* is the distance between the rider and the far lane when the far gap opens.
The first of these inequalities simply requires the near lane gap to afford safe crossing as in the case of the single lane crossing. The third inequality states that the overlap between the two gaps (i.e., the temporal interval when both gaps are simultaneously open for the rider) should be sufficiently large to move the bike from the near lane into the far lane. Finally, when judging whether the far gap is crossable, the rider must account for the additional distance (and therefore the additional time) that has to be covered to reach the far lane. The second inequality calls for the far gap (excluding any unusable portion that precedes the opening of the near gap) to be sufficiently large to afford safe crossing of the far lane and any additional distance d* that has to be covered to reach the far lane.
The value of d* depends on the temporal offset between the opening of the near and the far gaps (TFarLead-TNearLead), providing riders with two qualitatively different opportunities for crossing. When the far gap opens before or with the near gap (i.e., TFarLead ≤ TNearLead), then d* = dnear. A cyclist can consider the available temporal crossing interval when both lanes are clear of vehicles as a singular gap (or an “aligned” gap pair) spanning both lanes of traffic (Figure 1a). This makes only relatively large far lane gaps crossable since the far gap must remain open long enough for the rider to clear both lanes. Conversely, in a “rolling” gap pair (named by Brewer, Fitzpatrick, Whitacre, & Lord, 2006) the near lane gap opens before the far lane gap (Figure 1b). If the temporal offset is sufficiently large, the cyclist can enter the near lane before the far gap opens, bringing d* close to zero. This potentially allows the rider to cross much smaller gaps in the far lane compared to an aligned gap pair.
Figure 1.

Aligned and rolling gap pair shown as both spatial and temporal arrangements from the cyclist's perspective. The spatial presentation (1a) shows vehicle positions at a snapshot in time. The temporal presentation (1b) shows the times that the rider's line of travel is obstructed by a vehicle. The interval when the gap is open is highlighted in purple. Note that the temporal presentation represents the progression of time for both lanes of traffic in a temporally aligned (left to right) coordinate system. In this idealized case, both types of gap pairs are composed of the same size near and far gaps.
Coordinating Self and Object Movement
Once cyclists identify a gap (in case of a single lane crossing) or a gap pair (in case of crossing two lanes of traffic) that affords safe crossing, they must coordinate self and object movement to cross the intersection safely. When crossing a single lane of traffic, cyclists should time their movement so that they enter the intersection soon after the lead vehicle in the gap clears their path. This strategy maximizes the temporal safety margin with the oncoming tail vehicle in the gap.
Work on how children and adults cross a single lane of traffic indicates that children have more difficulty than adults with acting on their gap choices. In particular, child pedestrians and cyclists tend to delay initiation of road crossing relative to adults (te Velde et al., 2005; Lee et al., 1984; Pitcairn & Edelmann, 2000; Plumert et al., 2004, 2011; Young & Lee, 1987). As noted earlier, Plumert and colleagues (2004, 2011) found that even 10- and 12-year-old cyclists delayed initiation of movement, leading to reduced safety margins relative to adults. Further work indicates that this delay is at least in part due to difficulties with coordinating self and object movement. For example, te Velde, van der Kamp, and Savelsbergh (2008) asked children to move a doll across a small-scale “roadway” in between two approaching model cars. They found that 5- to 7-year-olds were not able to maneuver the doll as successfully as 10- to 12-year-olds or adults. Likewise, Chihak et al. (2010) found that 10- and 12-year-old cyclists had less time to spare than adults when intercepting a single moving gap on the run in an immersive, interactive virtual environment. Moreover, children's approaches to the intersection were more volatile than those of the adults, with more pronounced corrections in speed as they moved toward the intersection. Together, these findings indicate that the ability to coordinate self and object movement is undergoing significant change in late childhood and early adolescence.
Coordinating self and object movement is significantly more complicated when crossing multiple lanes of opposing traffic than when crossing a single lane of traffic. The crossing of the near and far lane must be coordinated, so that the rider can safely pass from the near lane to the far lane. When crossing through two gaps, the second lead vehicle to pass the rider's line of travel acts as a gate to the gap pair. Once it passes the rider, both gaps are open and the rider can move from the near lane to the far lane. In order to maximize the temporal safety margin when crossing two lanes of traffic, riders should therefore key their movements with respect to arrival time of the second lead vehicle in the selected gap pair. By synchronizing their movement to the arrival of the second lead vehicle, the riders can simplify the problem of crossing two one-lane gaps into the easier problem of crossing one two-lane gap.
Due to the differences in the configuration of rolling and aligned gap pairs, riders should use different approaches to coordinate their crossing of the two types of gap pairs. For aligned pairs, the second lead vehicle is in the near lane. Although the far gap is already open, the rider must wait for the near gap to open before entering the roadway. Once the near lane gap opens, however, the roadway in front of the cyclist is fully clear of traffic. This means that the rider should enter the near gap as soon as the lead vehicle in the near lane passes and then simply shoot through both gaps. For rolling pairs, the second lead vehicle is in the far lane. Although the gap in the near lane is already open, the rider must wait until the lead vehicle in the far lane passes before entering the far lane. To maximize the time to spare in both the near and far lanes, the rider should enter the near lane so as to cut in behind the lead vehicle in the far lane as soon as possible (once the near lane is open), and then ride across the remainder of the intersection.
Timing one's movement may be more difficult when crossing through a rolling gap pair than through an aligned gap pair for two reasons. The first is that the focus on the lead vehicle in the far lane (as opposed to a lead vehicle in the near lane) means that riders must coordinate their actions with an event that occurs further ahead in time and distance, making crossing through a rolling gap pair a more demanding perceptual-motor coordination problem. Past work has shown that 10- and 12-year-old cyclists have difficulty precisely timing their movement relative to the lead car when crossing a single lane of traffic restricted to the near lane (Plumert et al., 2004; 2011). Timing their movement relative to the lead car in the far lane may be even more difficult for children. The second reason is that crossing through a rolling gap pair requires riders to split their attention between the lead cars in the near and far lanes. As discussed earlier, when crossing a rolling gap pair riders should key their movement off of the lead car in the far lane. However, when the lead car in the near lane arrives shortly before the lead car in the far lane, the rider must also be careful to not enter the near lane before the lead car in the near lane has completely passed. This is not the case with an aligned gap pair, where the lead car in the far lane can be dismissed because it will have passed before the rider begins to cross the near lane. The added demand of dividing attention between both lead vehicles may make rolling gap pairs more difficult to cross than aligned pairs, particularly for children.
The Current Study
Our goal was to examine gap selection and road-crossing performance when children and adults cross two lanes of opposing traffic. Twelve-year-olds, 14-year-olds, and adults rode through a series of intersections in an immersive, interactive bicycling simulator. We chose these age groups based on earlier work showing that 10- and 12-year-olds are less adept than adults in timing their movement when crossing a single lane of traffic restricted to the near lane (Plumert et al., 2004; 2011). We shifted the child age range in the current study to 12- and 14-year-olds because we expected that 10-year-olds would have substantial difficulty crossing two lanes of relatively dense, opposing traffic.
Each intersection had a continuous stream of relatively dense cross traffic approaching from opposite directions in both the near and far lanes, corresponding to crossing a busy road. The task for children and adults was to cross both lanes of traffic without colliding with any vehicles. Hence, participants had to continuously evaluate opportunities to cross until they identified a pair of near and far gaps in the stream that they judged to be safe for crossing. Because two overlapping large gaps were rarely available, the participants had to make difficult choices in selecting a reasonably safe pair of gaps for crossing. We created this scenario because this task is more likely to reveal differences in gap selection preferences and road-crossing skills than one in which very large gaps are available in one or both lanes.
Overall, we expected to see a general preference for rolling gap pairs over similar-sized aligned gap pairs for all participants. The preponderance of relatively tight gaps in the traffic stream should boost the attractiveness of the rolling gap pairs for the participants because rolling pairs provide additional time for crossing compared to the similar-sized aligned pairs and therefore should be safer. We also expected to see that this preference for rolling gap pairs would be stronger in the adults than in the children. The relative difficulty of crossing through a rolling gap pair means that the choice of whether to cross an aligned vs. a rolling gap pair presents a tradeoff between simplicity and safety. Although aligned gap pairs present a simpler timing problem than do rolling gap pairs, aligned gap pairs provide less total time available for crossing than do rolling gap pairs for the same sized gaps in the near and far lanes. Thus, rolling gap pairs are arguably safer to cross, provided that the rider has a sufficient level of perceptual-motor skill. If the riders take their perceptual-motor skills into account when selecting a gap pair for crossing, one would expect that more skillful and mature riders would be more likely to select a rolling gap pair. Therefore, we expected the adults to show greater preference for rolling gap pairs compared to younger riders who have less developed perceptual-motor skills.
Finally, we expected that differences between the two gap pair configurations would also translate into differences in crossing performance. For example, if the riders are in fact timing their motion relative to the second lead vehicle in the pair, cyclists should exhibit different timing of entry into the intersection when crossing aligned vs. rolling gap pairs. Based on previous work, we also expected to see that the children would time their entry into the intersection less precisely than adults, cutting in less closely behind the second lead vehicle when crossing either rolling or aligned gap pairs. Furthermore, when crossing through an aligned gap pair the simplest crossing strategy would be to ride through the intersection as fast as possible. This suggests that riders should achieve higher average speeds when crossing through aligned than rolling gap pairs.
Method
Participants
A total of 105 children and adults participated. There were thirty-eight 12-year-olds (M = 12.5 years; SD = .36, 17 females), thirty-one 14-year-olds (M = 14.33 years; SD = .16, 15 females), and thirty-six adults (M = 19.08 years, SD = 1.56, 20 females). All children knew how to ride a bike, with an average of 6.6 years of riding experience for 12-year-olds and 8.5 years of riding experience for 14-year-olds. All adults reported learning how to ride a bike as a child. The children were recruited from a child research participant database maintained by a psychology department at a Midwestern university. Parents received a letter describing the study followed by a telephone call inviting children to participate. Children were paid $10 for their participation. Adult participants were recruited from an introductory level psychology course at the university, and received course credit for their participation.
Apparatus and Materials
The study was conducted using a high fidelity, real-time bicycling simulator (Plumert et al., 2004; 2011; http://www.cs.uiowa.edu/∼hank/). A bicycle mounted on a stationary frame was positioned in the middle of three 10 ft wide × 8 ft high screens (Figure 2). The screens were placed at right angles relative to one another, forming a three-walled room. Three Projection Design F1+ projectors were used to rear project high-resolution graphics onto the screens, providing participants with 270 degrees of nonstereoscopic, immersive visual imagery. The viewpoint of the scene was calibrated for each participant's eye height. Four speakers and a subwoofer provided spatialized traffic sounds.
Figure 2.
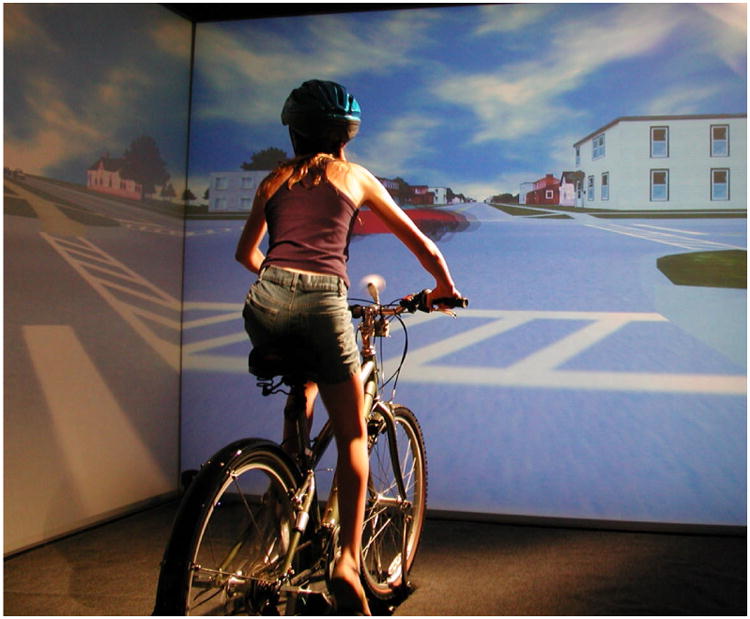
Photograph of the bicycling simulator. Note that the visual angles are correct from the viewpoint of the rider.
The virtual environment was populated with residential buildings, trees, and other roadside features typical of a small town. Participants rode through the town on a two-lane residential roadway intersected by cross streets with continuous traffic at 150 m intervals. There were stop signs at each intersection, indicating that the bicyclist should stop. All roadways were 12 m wide, and at a level grade. There was no ambient automobile traffic on the roadway with the participant.
The pedals, handlebars, and right hand brake were all functional. However, participants were not required to balance the bicycle because the bicycle mount was rigid. The steering angle and wheel speed were combined with virtual terrain information to render the graphics corresponding to the bicyclist's real-time trajectory through the virtual environment. The rear wheel was mated to a friction-drive flywheel that was connected to a torque motor to generate an appropriate dynamic force, taking into account rider and bicycle mass and inertia, virtual terrain slope, ground friction, and wind resistance.
The computing platform for the simulation environment was a networked cluster of six PCs. The software system was a highly refined real-time ground vehicle simulator developed in-house. This system supported complex scenarios consisting of ambient and programmatically-controlled traffic (Cremer, Kearney, & Willemsen, 1997; Willemsen, Kearney, & Wang, 2006).
While children were riding the bike, mothers were asked to complete a nine-item questionnaire regarding their child's bicycling history. The questionnaire was developed in-house to collect general information about children's bicycling skills and experience. Of particular interest in the current study was the mothers' report of when their child starting riding a bike without training wheels and their rating of “how skillful of a bicyclist you think your child is for his or her age” (on a 5-point scale).
Design and Procedure
The experiment began with a brief warm-up session designed to familiarize participants with the characteristics of the bicycle and the virtual environment. The experimenter informed participants that they would be riding through a virtual neighborhood, and instructed them to ride as though they were riding in a similar, real-world environment. Participants were asked to accelerate up to a comfortable speed, and to stay in the right lane of the roadway. During the familiarization session, participants were instructed to notify the experimenter if they experienced any simulator sickness. The warm-up session provided participants with the opportunity to learn how to steer, pedal, and stop the bicycle.
Following the warm-up session was a practice session in which participants crossed two intersections with a single lane of traffic. At the first practice intersection, the traffic approached from the left-hand side and was restricted to the near lane. At the second practice intersection, the traffic approached from the right-hand side and was restricted to the far lane. Participants were instructed to stop at each intersection and to cross when they felt it was safe to do so. The practice session was used to familiarize participants with the basic road-crossing task and with traffic coming from each direction.
After crossing the practice intersections, participants crossed 12 test intersections. Again, their task was to stop at each intersection and then cross when they felt it was safe to do so. This time, however, there was traffic in both near and far lanes, approaching from both directions. The cross traffic in each lane consisted of a series of cars traveling toward the intersection at 11.176 m/s (25 mi/h). The gaps in each lane were generated in seamlessly connected sets of six gap sizes ranging between 1.5-6.5 s at 1-second intervals. Each set was comprised of a randomly ordered permutation of the six gap sizes. The first vehicles in each near and far lane set arrived at the intersection simultaneously.
Coding and Measures
The coordinates of the rider and the vehicles were recorded on every time step of the simulation. Three key events were automatically identified for each intersection: 1) the time when the rider arrived at the intersection, defined as the time the bicyclist was 10 m from the edge of the intersection; 2) the times when the rider entered the near and far lanes, defined as the time that the front wheel crossed the edge of the lane; and 3) the times when the rider cleared the path of the approaching cars in the near and far lanes, defined as the time when the rear wheel of the bike cleared the path of the approaching car.
If at a given intersection a participant was intercepted by one of the vehicles on the road in either lane, the trial was classified as a “collision.” Of the 1,260 total crossings in the experiment, participants collided with a vehicle only 39 times for an overall collision rate of 3.1%. The collision rate was similar across the three age groups (12-year-olds = 3.9%, 14-year-olds = 3.5%, and adults = 1.9%). Of the 39 collisions, 11 were close calls (the participant missed the gap by less than 1 s.) The other 28 attempted crossings were dropped from the analyses because it was impossible to tell which gap pair the participant was attempting to cross.
Gap pairs were classified as either aligned or rolling. To take full advantage of a rolling gap pair configuration, the cyclists must be able to cross the near lane before the far lane opens. Based on the average near lane crossing time of 1.5 s, we defined rolling gap pairs as those with a temporal offset (TFarLead-TNearLead) of at least 1.5 seconds. Temporal offsets of less than 1.5 s were classified as aligned gap pairs.
Results
The data analyses are organized into three major sections: 1) gap selection, 2) crossing performance, and 3) safety margins. With respect to gap selection, we were particularly interested in whether participants' choices of gap pairs to cross were influenced by the age of the rider and the type of gap pair (i.e., aligned or rolling). With respect to crossing performance, we were interested how participants in the three age groups coordinated their movement through aligned and rolling gap pairs in terms of direction and speed of travel, and timing of entry into the near and far lanes. Finally, with respect to safety margins, we were interested in whether children had smaller safety margins than adults, and whether participants had greater safety margins when crossing rolling than aligned gap pairs.
Gap Selection
We constructed a series of mixed-effects logistic regression models to analyze participants' choices of gap pairs to cross. These models attempted to predict the value of a response variable representing the decision to select or reject each pair of near and far gaps. The gap pairs were described using four independent variables (fixed-effects predictors): near gap size, far gap size, pair type (aligned or rolling), and age group. Participants observed continuous streams of gap pairs until they selected a gap pair for crossing. Therefore, each participant contributed approximately 12 positive responses (i.e., the gap pairs they chose to accept for crossing at the 12 intersections) and an a priori undefined number of negative responses (i.e., the gap pairs that they observed, but chose to reject). To account for individual differences between the participants we also clustered the responses from the same person together by including a random-effect variable for subject. Due to a limited number of observations for each participant, we decided to exclude the effect of intersection from the analysis (i.e., we collapsed observations across intersections).
Following a general model-building strategy (Hosmer & Lemeshow, 2000, pp. 91-116), we explored a series of models with univariate predictors, main effect combinations, as well as two-way and three-way interactions between fixed predictors. We first explored the significance of the fixed predictors by constructing four separate univariate models containing a single fixed predictor and the random effect. All four proved to be strong predictors of participants' choices (α = 0.01). Second, we created a main effects model that simultaneously included all four fixed-effects and the random effect of subject. This model showed all four variables remaining significant predictors in combination with each other. As a third step we explored the inclusion of all possible 2-way interactions (one at a time) into the main effects model. We retained those interactions that were significant at the α = 0.1 level. There were no significant two-way interactions involving near gap size. Next we constructed a model that simultaneously included the main effects and all remaining two-way interactions from step three. All of the terms remained highly significant in combination. Finally, we attempted to add the only possible (due to the absence of two-way interactions with near gap size) three-way interaction between far gap size, age group and gap type into this model and found that it was not significant (p = 0.83). In the end, we obtained a robust model (Table 1) with a good fit to the data and excellent discrimination (concordance index c = 0.84). The model highlights three key aspects of participants' gap selection: 1) preferences for choosing rolling vs. aligned gap pairs, 2) selectivity with respect to gap size, and 3) age differences in willingness to accept a given gap pair.
Table 1. Mixed-Effects Logistic Regression Model for Likelihood of Selecting a Gap Pair.
| Variables | Estimate | SE | z-value | p-value |
|---|---|---|---|---|
| Fixed Effects | ||||
| Intercept | -11.83 | .45 | -26.05 | .0001 |
| Age 12 | 1.35 | .44 | 3.07 | .002 |
| Age 14 | .44 | .48 | .92 | .36 |
| Rolling Gap Pair | 3.06 | .37 | 8.26 | .0001 |
| Near Gap Size | .75 | .03 | 25.15 | .0001 |
| Far Gap Size | 1.03 | .07 | 15.21 | .0001 |
| Age 12 × Rolling Gap Pair | -.65 | .17 | -3.86 | .0001 |
| Age 14 × Rolling Gap Pair | -.64 | .17 | -3.68 | .0001 |
| Age 12 × Far Gap Size | -.21 | .07 | -2.96 | .003 |
| Age 14 × Far Gap Size | -.10 | .08 | -1.29 | .198 |
| Rolling Gap Pair × Far Gap Size | -.39 | .06 | -6.31 | .0001 |
|
| ||||
| Random Effects | Variance | SD | ||
| Subject | .18 | .43 | ||
Preference for Rolling vs. Aligned Gap Pairs
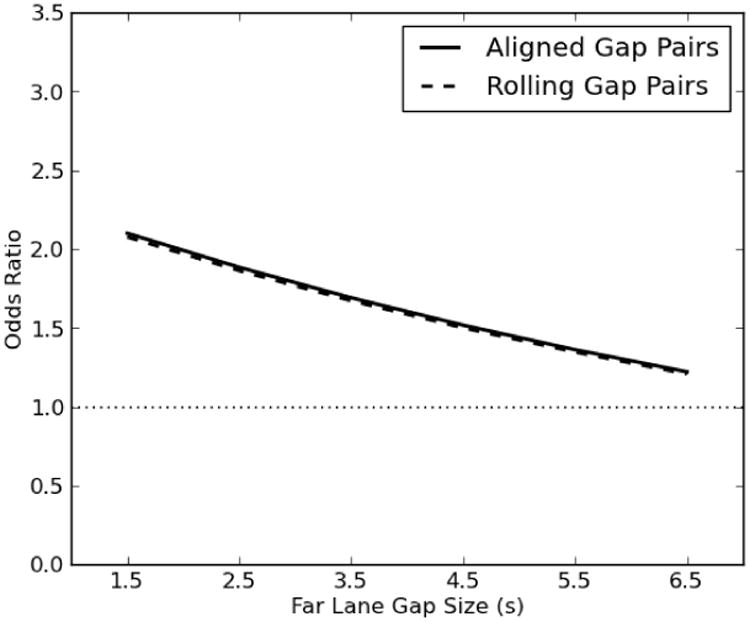
Both children and adults exhibited a preference for rolling over aligned gap pairs. Due to the interaction between far lane gap size and pair type, the relative odds of taking a rolling vs. aligned pair depended on and exponentially declined with increases in the far gap size (Figure 3). Adults consistently preferred the rolling to the aligned pairs of similar size (as evidenced by the odds ratio greater than 1 over the entire observed range of far lane gap sizes). With the exception of the pairs containing large far lane gaps (6.5 s), this was also true for children. In addition, the odds of taking a rolling over an aligned gap pair were significantly higher for adults than children (p < 0.001 for both 12 year-olds and 14 year-olds). Odds ratios for 14-year-olds and 12-year-olds did not differ significantly (p = 0.93).
Figure 3.
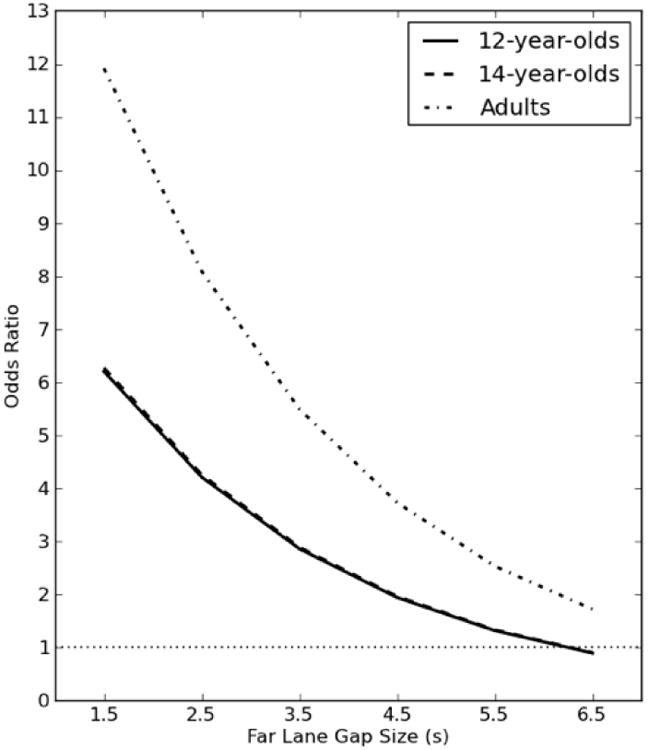
Estimated odds ratios for taking rolling over aligned gap pairs for each age group as function of the far lane gap size. An odds ratio of 1 corresponds to equal odds of accepting aligned and rolling gap pairs; an odds ratio grater than 1 corresponds to preference for rolling gap pairs
Sensitivity to Near and Far Gap Sizes
Overall, participants preferred larger gaps in both near and far lanes. The probability of selecting a gap pair increased with the size of the near gap, regardless of age group, gap pair type (aligned or rolling), or the size of the far lane gap. With every 1-second increase in near gap size, the odds of accepting a gap pair increased by 2.11 (95% confidence interval [1.99, 2.24]).
The probability of selecting a gap pair also increased with the size of the far gap. However, far gap size also interacted with pair type and age group. Participants were significantly more sensitive to changes in far gap size in aligned than in rolling gap pairs (p = .0001). Twelve-year-olds were significantly less sensitive to changes in far gap size compared to adults (p = .003), whereas 14-year-olds did not differ significantly from adults (p = .198) or 12-year-olds (p = .145). Figure 4 shows the corresponding probabilities of accepting aligned and rolling gap pairs as a function of far gap size for each of the three age groups. The corresponding odds ratios for a unit (1-second) change in far gap size for aligned and rolling pairs were OR = 2.11 (95% confidence interval [1.85, 2.41]) and OR = 1.43 [1.24, 1.66] for adults, OR = 1.91 [1.61, 2.27] and OR = 1.3 [1.08, 1.56] for 14-year-olds, and OR = 1.71 [1.46, 2.01] and OR = 1.16 [0.98, 1.39] for 12-year-olds, respectively. Here, the higher odds ratios correspond to steeper slopes of the probability functions.
Figure 4.
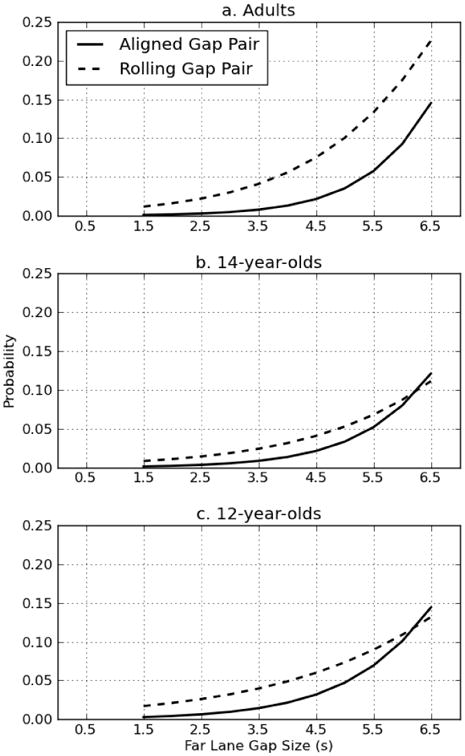
Estimated probability of accepting aligned and rolling gap pairs for adults (a), 14-year-olds (b) and 12-year-olds (c). The near gap size is fixed at 4.5 seconds.
These results suggest that participants generally selected larger gaps in both the near and the far lanes whenever traffic conditions presented such opportunity. In addition, steeper slopes of the probability functions for aligned gap pairs indicate that the riders were significantly more selective in choosing far lane gaps for the aligned pairs than for the rolling pairs. This confirms our theoretical prediction that riders could identify crossable rolling gap pairs that include smaller far lane gaps compared to the aligned gap pairs. Finally, the age-related differences in the slopes of the probability functions indicate that more mature riders also had more precise criteria for selecting crossable gap pairs.
Age Differences in Willingness to Accept Given Gap Pairs
Our model indicates that overall willingness to accept a gap pair depended on age group, pair type, and far gap size. For both aligned and rolling gap pairs, the odds ratio comparing willingness of children relative to adults to accept a gap pair with a given far gap size exponentially decreased for larger far lane gaps (Figure 5). For rolling gap pairs, 14-year olds were consistently more conservative than adults in their gap pair choices (the corresponding odds ratio is consistently lower than 1 over the entire range of observed far lane gap sizes). In contrast, 12-year-olds were more willing than adults to select a rolling gap pair that included a tight gap in the far lane. For aligned gap pairs, 14-year-olds were more willing than adults to accept an aligned gap pair that included a relatively small far lane gap. Similarly, 12-year-olds were more willing than adults to accept aligned gap pairs with far gaps of any size, except for the very large (6.5s) gaps. Odds ratios indicate that 12-year-olds were also more willing than 14-year-olds to accept both aligned and rolling gap pairs (Figure 6).
Figure 5.
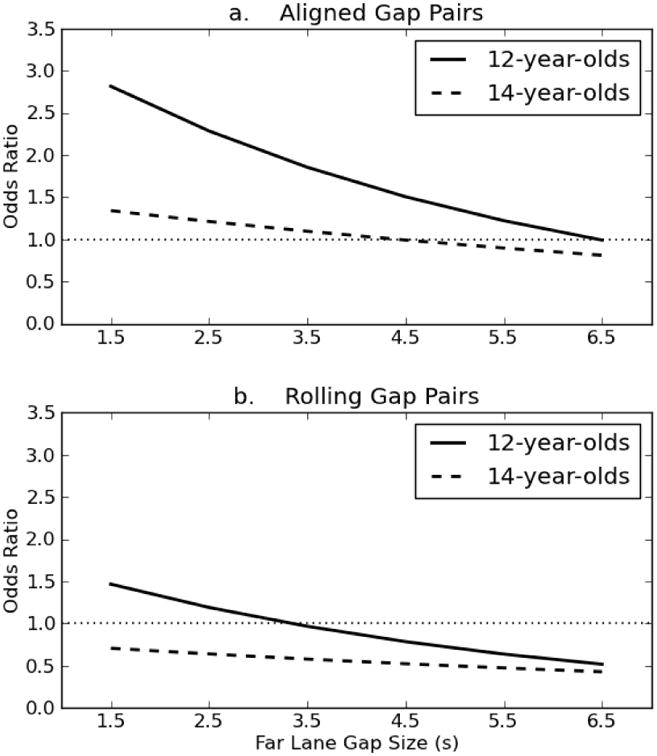
Estimated odds ratios for willingness of children relative to adults to accept an aligned (a) or a rolling (b) gap pair as a function of far lane gap size. An odds ratio of 1 corresponds to equal odds of accepting a gap pair for adults and children; an odds ratio greater than one shows that children are more likely to accept a given gap pair than are adults.
Figure 6.
Estimated odds ratios for relative willingness of 12-year-olds compared to 14-year-olds to accept an alinged or a rolling gap pair. An odds ratio of 1 corresponds to equal odds of accepting a gap pair for 12-year-olds and 14-year-olds.
Crossing Performance
Our second set of analyses focused on how children and adults negotiated crossing through selected gap pairs. Of particular interest was whether the choice to cross an aligned or rolling gap pair constrained how children and adults coordinated their movement through the gap pair. First we explored whether participants adjusted their direction and speed of travel when crossing aligned vs. rolling gap pairs. Then we looked at how children and adults timed their entry into the roadway when they crossed aligned vs. rolling pairs. All variables were analyzed in Age (12 years vs. 14 years vs. adults) × Pair Type (aligned vs. rolling gap pair) mixed model ANOVAs with the first factor as a between-subjects variable and the second as a within-subjects variable. All follow-up pair-wise comparisons were conducted using Fisher's Protected Least Significant Difference (PLSD) test with an alpha level of .05.
Crossing Trajectories
Travel direction
The analysis of participants' lateral motion from entering to exiting the roadway for aligned and rolling gap pairs revealed significant main effects for both age, F (2, 102) = 10.43, p < .001, ηp2 = .51, and pair type, F (1, 102) = 78.55, p < .001, ηp2 = .44. Follow-up tests showed that 12-year-olds' overall travel direction (M = .013, SD = .035) was shifted leftwards while the travel direction of the 14-year-olds (M = -.009, SD = .036, p < .001), and adults (M = -.01, SD = .034, p < .001), were shifted to the right. More importantly, as Figure 7 shows the participants were moving leftward when crossing an aligned gap pair (M = .015, SD = .025) and rightward when crossing a rolling gap pair (M = -.018, SD = .039). This difference between the two pair types suggests that when participants chose a rolling gap pair, they aimed for the opening of the gap in the far lane. In other words, because the gap in the far lane was not open when participants entered the near lane, they veered slightly to the right as they aimed for the opening of that gap. In contrast, when participants chose an aligned gap pair, they veered to the left to avoid being hit by the closing of the far lane gap.
Figure 7.

Mean y-coordinate trajectories associated with crossing either an aligned or rolling gap pair. The trajectories are normalized relative to the mean y-coordinate when the cyclists started crossing the intersection.
Crossing speed
Figure 8 shows the mean speed trajectories associated with crossing an aligned and a rolling gap pair. Participants' crossing speed was higher when they crossed aligned gap pairs (M = 6.8 mi/h, SD = 1.5) than rolling gap pairs (M = 6.1 mi/h, SD = 1.5), F (1, 102) = 112.42, p < .001, ηp2 = 0.52. This difference between the two pair types indicates that participants were able to pick up greater speed when the near and far lane gaps were both open (an aligned pair) than when the near lane gap was open but the far lane gap was not open (rolling pair) at the time they entered the near lane.
Figure 8.

Mean speed profiles associated with crossing either an aligned or rolling gap pair.
Timing of Entry into Near and Far Lanes
A critical measure of how participants timed their movement is how closely they cut in behind the lead car in the gap (Figure 9ab). Small values indicate that the rider cut in closely behind the lead vehicle in the gap, while large values indicate that the rider hesitated longer. The key advantage of entering the lane shortly after the lead car clears the rider's line of travel is the ability to fully utilize the time available within the gap and therefore maximize the safety margins with the tail car.
Figure 9.
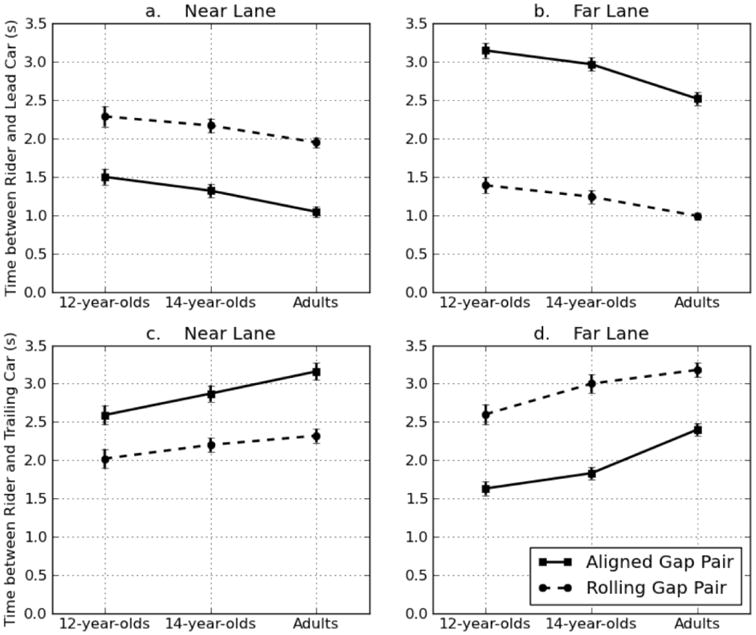
Timing of entry relative to the lead car in the near lane (a) and far lane (b), and time-to-spare relative to the trailing car in the near lane (c) and far lane (d) for 12-year-olds, 14-year-olds, and adults as function of selected gap pair type.
The analysis of the near lane revealed effects of age, F (2, 102) = 5.68, p < .01, ηp2 = .10, and pair type, F (1, 102) = 288.61, p < .001, ηp2 = .74. Overall, adults (M = 1.50 s, SD = .61) cut in closer behind the lead vehicle than 12-year-olds (M = 1.89 s, SD = .83, p = .001), and 14-year-olds (M = 1.75 s, SD = .65, p = .048). In addition, participants cut in substantially closer behind the lead vehicle in the near lane when crossing an aligned gap pair (M = 1.29 s, SD = .55) than when crossing a rolling pair (M = 2.14 s, SD = .62). This difference between the gap types suggests that participants' movement timing was influenced by the type of gap pair they chose to cross. When crossing a rolling pair, entering the near lane too soon would risk either stalling in the middle of the lane or crashing into the lead vehicle in the far lane. These factors did not apply when crossing an aligned gap pair because both gaps were simultaneously open, allowing riders to cut in closer behind the lead vehicle in the near lane.
The analysis of the far lane also revealed effects of age, F (2, 102) = 13.95, p < .001, ηp2 = .22, and pair type, F (1, 102) = 883.43, p < .001, ηp2 = .90. Again, adults (M = 1.75 s, SD = .87) cut in closer behind the lead vehicle in the far lane than 12-year-olds (M = 2.27 s, SD = 1.08, p < .001), and 14-year-olds (M = 2.11 s, SD = 1.00, p = .001). Participants also cut in substantially closer behind the lead vehicle in the far lane when crossing a rolling gap pair (M = 1.2 s, SD = .52) than when crossing an aligned pair (M = 2.88 s, SD = .59). The difference between the pair types in timing relative to the lead vehicle in the far lane and in rightward veering while crossing the intersection suggests that participants were keying their movement timing off of the lead vehicle in the far lane when they crossed a rolling gap pair.
Safety Outcomes
The final issue of interest was the outcome of the crossing in terms of time to spare on clearing each lane of traffic and the overall minimum margin of safety. All performance measures were analyzed in Age (12 years vs. 14 years vs. adults) × Pair Type (aligned vs. rolling gap pair) mixed model ANOVAs with the first factor as a between-subjects variable and the second as a within-subjects variable. All follow-up pair-wise comparisons were conducted using Fisher's Protected Least Significant Difference (PLSD) test with an alpha level of .05.
Time-to-spare When Exiting the Near and Far Lanes
We first examined how participants fared as they cleared each lane. A critical measure of safety is the time left to spare when participants clear the path of the oncoming car (Figure 9cd). Less time-to-spare indicates a reduced safety margin between the cyclist and the approaching vehicle.
The analysis of the near lane revealed an effect of pair type, F (1, 102) = 84.03, p < .001, ηp2 = .45, indicating that as expected participants had significantly more time-to-spare when crossing an aligned pair (M = 2.87 s, SD = .72) than when crossing a rolling gap pair (M = 2.18 s, SD = .64). There was also a significant main effect of age, F (2, 102) = 6.28, p < .01, ηp2 = .11. Although the Age × Pair Type interaction was not significant, F (2, 102) = 1.08, ns, 12-year-olds had significantly less time-to-spare than adults for both aligned and rolling gap pairs, p = .001, whereas adults and 14-year-olds did not differ significantly for either aligned or rolling gap pairs.
The analysis of the far lane revealed an effect of pair type, F (1, 102) = 245.49, p < .001, ηp2 = .70, and an Age × Pair Type interaction, F (2, 102) = 3.14, p < .05, ηp2 = .06. In this case, participants had substantially more time-to-spare when they crossed a rolling gap pair (M = 2.91 s, SD = .73) than when they crossed an aligned pair (M = 1.95 s, SD = .59). In addition, 12- and 14-year-olds had significantly less time-to-spare than adults when they crossed an aligned gap pair, p < .001 and p < .001, respectively. When crossing a rolling pair, 14-year-olds and adults had significantly more time-to-spare than 12-year-olds (p = .019 and p < .001, respectively).
The fact that participants had more time to spare in the near lane when crossing aligned pairs and more time to spare in the far lane when crossing rolling pairs is particularly interesting given the mean size of the gaps in the near and far lanes that participants crossed. Participants actually crossed smaller near lane gaps for aligned (M = 5.6 s, SD = .42) than for rolling gap pairs (M = 5.92 s, SD = .38), t (104) = -6.34, p < .001, and they crossed smaller far lane gaps for rolling (M = 5.34 s, SD = .65) than for aligned gap pairs (M = 5.98 s, SD = .33), t (104) = 10.13, p < .001. This suggests that by keying their movement off of the second lead vehicle, participants were able to achieve larger safety margins even when crossing smaller gaps.
Minimum Safety Margin
A final measure of the cyclists' crossing performance is the closest call they encountered with one of the two trailing vehicles. For each intersection, the minimum safety margin was calculated by taking the smaller of the times-to-spare when clearing each lane of traffic. The analysis of the mean minimum safety margin revealed effects of age, F (2, 102) = 15.77, p < .01, ηp2 = .24, and pair type, F (1, 102) = 7.75, p < .01, ηp2 = .07, Adults (M = 2.10 s, SD = .45) had a larger minimum safety margin than 14-year-olds (M = 1.81 s, SD = 0.51, p < .001), who had a larger minimum safety margin than 12-year-olds (M = 1.51 s, SD = 0.64, p = .007). In addition, participants had a larger minimum safety margin when crossing a rolling gap pair (M = 1.87 s, SD = .63) than when crossing an aligned gap pair (M = 1.72 s, SD = .55). The fact that choosing a rolling gap pair resulted in a substantially larger minimum safety margin indicates that rolling gap pairs were actually safer than aligned gap pairs.
Discussion
The overarching aim of this investigation was to examine how children and adults perceive and act on complex affordances. To this end, we asked participants to cross two lanes of relatively dense, continuous traffic coming from opposing directions. We found that both children and adults preferred rolling over aligned gap pairs, but that this preference was stronger in adults than in children. For both children and adults, the choice of rolling vs. aligned gap pairs had a clear impact on speed and direction of travel, as well as the timing of entry into the near and far lanes. Participants were able to pick up greater speed when crossing aligned than rolling gap pairs, and they veered right when crossing rolling pairs (toward the lead vehicle in the far lane gap) and left when crossing aligned gap pairs (away from the tail vehicle in the far lane gap). As expected, participants appeared to key their movement off of the second lead vehicle to reach their line of travel. This meant that they cut in closely behind the lead vehicle in the near lane gap when crossing aligned gap pairs and they cut in closely behind the lead vehicle in the far lane gap when crossing rolling gap pairs. As in previous work, children timed their entry into the roadway less precisely than did adults, and also had smaller margins of safety than did adults. Below, we discuss explanations for these results and suggest future directions for examining perception-action-cognition links in the context of perceiving and acting on complex affordances.
Preferences for Rolling Gap Pairs
When faced with the challenge of crossing two lanes of relatively dense opposing traffic, the participants seemed to recognize the potential of rolling pairs to stretch the total time available for crossing (Figure 1b). In accordance with our hypothesis, both children and adults showed a pronounced preference for selecting a rolling gap pair over a similar sized aligned gap pair. More importantly, even though crossing through a rolling gap pair was arguably a more difficult task, riders were able to achieve higher safety margins. Overall, riders achieved an impressive 49% gain in time-to-spare in the far lane and a significant 8.7% gain in mean minimal safety margin when crossing through a rolling gap pair compared to an aligned gap pair. Together, this supports the idea that the more complex crossing strategy may actually be the safer one.
The attractiveness of the rolling gap pair depends on the traffic density (i.e., the available gap sizes). When available gap sizes are relatively small, the opportunities to find crossable aligned gap pairs are relatively scarce, leading participants to choose more rolling gap pairs. When the gap sizes are sufficiently large (particularly in the far lane), finding a crossable aligned pair is easier and the preference for rolling gap pairs should gradually disappear. Our data shows that the odds of accepting a rolling gap pair over aligned gap pair decrease dramatically with an increase in the size of available gaps, particularly in the far lane (Figure 3). When the gap sizes in the far lane are sufficiently large (6.5 s gaps), our model predicts virtually no difference in probability children of accepting aligned and rolling gap pairs (Figure 4). Adults follow a similar trend. These findings suggest that the gap selection strategy we observed in the present experiment may be most applicable to the situation where the traffic is relatively dense and people need to find a way to stretch the overall available time for crossing in order to cross safely.
Developmental Differences
Children appeared less confident in their ability to safely negotiate the more challenging rolling gap pairs as evidenced by their significantly less pronounced preference for rolling pairs (Figure 3). Fourteen-year-olds in particular were consistently more conservative compared to adults when selecting a rolling gap pair (Figure 5b). At the same time, children had a substantially smaller minimum margin of safety compared to adult riders, which was 28% smaller for 12-year-olds and 14% smaller for 14-year-olds.
One possible explanation for these differences is that children were less comfortable than adults in starting to cross the near lane before the far lane gap had opened, as required for optimal crossing of a rolling gap pair. While all age groups achieved similar crossing speeds, 12- and 14-year-olds significantly delayed their entry into the near lane (by 26% and 17% respectively) compared to adults. This is consistent with Barton and Schwebel's (2007) observation that child pedestrians crossing a two-lane road were less likely than adults to venture out into the near lane of traffic before the far lane was completely open. Why might this be the case? First, children have less experience than adults in dealing with traffic and might be less confident that they can make a reliable prediction of the traffic movement. As a result, they may hesitate to act in anticipation of the future position of the lead vehicle in the far lane. Second, children may also be aware that when crossing the road on the bike they cannot easily go backwards or turn around. This increases the cost of errors in judging when the far lane might be open for crossing.
Another possible explanation for the overall age differences in preferences for rolling gap pairs is that when choosing gap pairs for crossing, children attempted to select gap pairs that better matched their less developed abilities for timing the crossing movements. To accurately judge affordances, observers need to take into account both the properties of the environment and their own action capabilities (Adolph, 2000; Gibson, 1979; Plumert, 1995). The significant delays in entering the near lane of traffic seen here demonstrate that children were clearly less skillful in timing their crossing through selected gap in traffic than adults. This is consistent with earlier studies showing that 10- and 12-year-old cyclists delayed initiation of movement when crossing a single lane of traffic (Plumert et al., 2004, 2011) and have smaller safety margins when intercepting moving gap on the run (Chihak et al., 2010). To compensate for less-developed abilities in timing their crossing, children may have chosen to be more conservative compared to adults in selecting the more difficult rolling gap pairs.
The observed developmental differences also suggest that ability to precisely calibrate gap choices to match road-crossing ability may be related to developmental and individual differences in children's level of bicycling skill, particularly with respect to selecting the more demanding rolling gap pairs. When choosing a rolling gap pair to cross, 14-year-olds were consistently more conservative compared to adults (Figure 5b), whereas 12-year-olds were less discriminating compared to adults and 14-year-olds (Figure 6). Specifically, 14-year-olds (but not 12-year-olds) were less likely than adults to choose a rolling gap pair of any size. In addition, when crossing rolling gap pairs, 14-year-olds (M = 5.48 s, SD = .60) tended to select larger far lane gaps on average than did 12-year-olds (M = 5.18 s, SD = .72), t (67) = -1.91, p = .06). As a result, while both 12-year-olds and 14-year olds delayed their entry into the far lane of traffic compared to adults (Figure 9b), 14-year-olds achieved an average time-to-spare in the far lane that was similar to that of adults and significantly larger compared to that of 12-year-olds. This suggests that 14-year-olds were better able to match their gap choices to their riding abilities than were 12-year-olds. Combined with the fact that older children generally have more practice and therefore better developed bicycling skills, these data support the idea that precision in judging possibilities for crossing may be related to higher action capabilities.
This idea is further supported by data from the parental questionnaires suggesting that children with more skill at bicycling were better at crossing rolling gap pairs. Mothers' rating of their children's real-world bicycling skill was significantly correlated with children's mean time-to-spare when clearing the far lane of traffic when crossing rolling gap pairs for both 12-year-olds, r (37) = .38, p = .02, and for 14-year-olds, r (31) = .37, p = .04. These developmental and individual differences in skill point to the possibility that more skilled riders (who can both accurately perceive the environment and assess their own action capabilities) are better at accurately judging possibilities for safe crossing as evidenced by acceptable safety margins even when crossing the more demanding rolling gap pairs. Less skilled riders, however, are likely to perceive crossing affordances imperfectly and as a result may sometimes misjudge gap affordances. This can have dire consequences when crossing real-world roads similar to the ones used here.
What implications do these results have for understanding perceptual-motor development? The fact that even 14-year-olds were not as skillful as adults indicates that there are changes in the perceptual-motor system that extend well beyond infancy and early childhood (Plumert, Kearney, & Cremer, 2007; Vasudevan, Torres-Oviedo, Morton, Yang, & Bastian, 2011). These changes appear to be quantitative rather than qualitative in nature, involving improvements in children's ability to precisely time their movements in relation to other moving objects. One late-maturing brain structure critical for the precise timing of movement is the cerebellum (Ivry & Keele, 1989; Keele and Ivry, 1990). Neuroimaging studies also show that the cerebellum is recruited most heavily for motor tasks like the one used here that require individuals to pay close attention and concentrate (for a review, see Diamond, 2000). Given that the cerebellum continues to mature up until at least puberty (Tiemeier, Lenroot, Greenstein, Tran, Pierson, & Giedd, 2010), it seems likely that the differences between children and adults observed here are at least partly due to differences in cerebellar functioning. Further work is needed to better understand the complex bidirectional relationships between cerebellar functioning and motor movements, perhaps involving populations known to have both movement problems and cerebellar abnormalities such as children with ADHD (Barkley, DuPaul, & McMurray, 1990; Mostofsky, Reiss, Lockhart, & Denckla, 1998).
Coping with Complex Affordances
The experimental task reported here represents a significantly more challenging task than those typically used in research on the perception of affordances. Most studies on perceiving dynamic affordances utilize a paradigm in which the participant must only respond to the movement of one object at a time (e.g., Chardenon, Montagne, Laurent, & Bootsma, 2002, 2005; Fajen & Warren, 2004, 2007; Oudejans, Michaels, Bakker, & Dolne, 1996). In order to complete the current task, riders had to identify two crossable gaps from opposing streams of relatively dense traffic and predict whether the gaps would overlap when they arrived at the intersection. The task was further complicated by the fact that the approaching gaps in each lane could not be viewed simultaneously. Therefore, in order to identify a pair of crossable near and far lane gaps the riders needed to integrate both visually available and remembered information about several potentially viable alternatives. This raises the question of what specific information about the out-of-view gaps riders might be remembering.
One possibility is that cyclists actively keep track of the movement of the out-of-view gaps by continuously updating an internal representation of the position of the gap, or by using an estimate of the gap's TTC as a clocking mechanism, which counts down while they visually scan the other lane (Tresilian, 1995). Each of these active-tracking solutions requires committing cognitive resources to monitoring the position of the out-of-view gap for a relatively long period of time and can be especially taxing when tracking multiple gaps at the same time. Because the accuracy of representations based on these estimates diminishes rapidly, this technique may only be feasible for the most skilled of cyclists.
Another possible solution would be for cyclists to initially coarse-code a pair of near and far lane gaps as “crossable,” without attempting to mentally keep track of the precise position of the gaps. Once acceptable gaps are located in both lanes, the rider can check back and forth to see if the overlap between the selected gaps still seems to be sufficient for safe crossing. By checking and rechecking the position of the two gaps as they close in on the intersection, cyclists are reducing the amount of time into the future that they must make predictions about the relative position of the out-of-view gap. Diminishing reliance on an internal representation is also likely to decrease the magnitude of the error in cyclists' predictions. This system of pre-selection of crossable gaps followed by checking and rechecking each lane of traffic may require less on-line cognitive load than actively tracking an internal representation.
Future Directions
The results of the current study prompt a number of questions regarding perception-action-cognition links, particularly the role of cognitive processes in identifying and acting on complex affordances. The crossing task used here required cyclists to process information about a large number of potentially relevant gaps and to track two opposing streams of traffic, only one of which could be kept in view at any one time. It is likely that cognitive processes are involved both in identifying gaps in traffic that are most likely to be crossable and in integrating information about gaps that cannot be seen at the same time. We can begin to understand the role of these processes by examining how modifying the more cognitive aspects of the task influences gap selection (both gap size and the types of gap pairs) and crossing performance (timing of entry into near and far lanes).
One way in which cognitive processes may play a role in crossing two lanes of opposing traffic is through integration of information about gaps that cannot be seen at the same time. We can examine this issue by modifying the task such that the vehicles in both lanes approach from the same direction (effectively a two-lane one-way road). If the vehicles in both lanes approach from the same direction, visual information specifying the crossability of the near and far lane gaps would be accessible simultaneously while the time available for crossing aligned and rolling gap pairs and the spatial-temporal relations within each lane would be identical to those in the current study. This would eliminate the need to mentally track cars that are out of view, thereby decreasing the cognitive demands of the task. In addition, this new configuration also provides an additional perceptual cue for gap overlap. If the vehicles are traveling at the same speed, then the spatial overlap of the gaps directly corresponds to the temporal overlap of the gap pair (the time interval that the gaps are both open for the rider to cross). Previous research has shown that distance is an important cue in judging the crossability of gaps in a single lane of traffic (Connelly, Conaglen, Parsonson, & Isler, 1998; Hunt, Harper, & Lie, 2011; Lobjois & Cavallo, 2007). We anticipate that riders (particularly children) would find it simpler to both judge the crossability of gap pairs and to time their crossing action when crossing two lanes of one-way traffic. This should be reflected in the size of gaps that are crossed and in the relative preference for rolling vs. aligned gap pairs (i.e., riders should cross smaller gaps and show a greater preference for rolling pairs). We also expect that participants would better time their movement thereby increasing time left to spare for the same sized gap pairs compared to two-way traffic.
Another way in which cognitive processes may play a role in crossing two lanes of opposing traffic is through knowledge about traffic patterns. Riders may use their prior experience and knowledge of typical real-world traffic patterns to produce a more accurate assessment of whether a given gap pair is crossable. For example, in North America traffic drives on the right side of the roadway. This means that at an ordinary intersection with two lanes of cross traffic, cars in the near lane will approach from the left and cars in the far lane will approach from the right. One way to test the hypothesis is to switch the direction of travel of traffic in the near and far lanes. In this case, the perceptual information indicating whether a given gap pair affords safe crossing would be the same as that in the present study, but the flow of traffic would be the opposite of people's experience interacting with real-world traffic. If the knowledge about real world traffic plays a role, then we should see differences in gap selection (e.g., less preference for the more complex rolling gap pairs) and crossing performance (e.g., less precise timing of entry into near and far lanes) when people cross two lanes of opposing traffic that does not conform to the expected traffic pattern.
Conclusions
Our work underscores the complexity of judging and acting on affordances that involve movement of the self in relation to multiple moving objects that are not all simultaneously in view. To safely cross two lanes of opposing traffic, riders must first select a suitable pair of gaps based both on their individual sizes and the spatio-temporal relationship between them. They must then synchronize their movement to the arrival of the near and far gap in the selected gap pair. While other theoretical models have shown that single optical variables can explain judgments of affordances and guidance of locomotion (Fajen & Matthis, 2011; Lee, 1998; Lee et al., 2009), given the complexity of the task in the present study it seems unlikely that there is a single, directly-perceivable optical invariant that carries all of the necessary information about whether a given gap pair affords safe crossing. Further work is needed is to identify what sources of perceptual (and remembered) information people are using to both judge gap affordances and to guide their movement through multiple gaps in traffic.
The results of the current study also inform our understanding of risk factors for car-bicycle collisions involving child cyclists. Specifically, compared to adults, children appear to have difficulty identifying gap pairs in traffic that afford crossing with the greatest possible safety margins. We expect that similar sorts of risky gap choices and poorly coordinated movements are likely to be seen with younger child pedestrians and with novice teen drivers attempting to cross roads with opposing traffic, indicating that similar processes underlie immature road-crossing behavior across the modalities of walking, bicycling, and driving.
Acknowledgments
This research was supported by grants awarded to Jodie Plumert, Joseph Kearney, and James Cremer from the National Center for Injury Prevention and Control (R49/CE001167), the National Institute of Child Health and Human Development (R01-HD052875), and the National Science Foundation (CNS-0750677). We thank the undergraduate research assistants for their help with data collection.
References
- Acton CH, Tomas S, Nixon JW, Clark R, Pitt WR, Battistutta D. Children and bicycles: what is really happening? Studies of fatal and non-fatal bicycle injury. Injury Prevention. 1995;1:86–91. doi: 10.1136/ip.1.2.86. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Adolph KE. Specificity of learning: Why infants fall over a veritable cliff. Psychological Science. 2000;11:290–295. doi: 10.1111/1467-9280.00258. [DOI] [PubMed] [Google Scholar]
- Ashbaugh SJ, Macknin ML, VanderBrug Medendorp S. The Ohio bicycle injury study. Clinical Pediatrics. 1995;34(5):256–260. doi: 10.1177/000992289503400505. [DOI] [PubMed] [Google Scholar]
- Barkley RA, DuPaul GJ, McMurray MB. A comprehensive evaluation of attention deficit disorder with and without hyperactivity. Journal of Consulting and Clinical Psychology. 1990;58:775–789. doi: 10.1037//0022-006x.58.6.775. [DOI] [PubMed] [Google Scholar]
- Barton BK, Schwebel DC. The roles of age, gender, inhibitory control, and parental supervision in children's pedestrian safety. Journal of Pediatric Psychology. 2007;32(5):517–526. doi: 10.1093/jpepsy/jsm014. [DOI] [PubMed] [Google Scholar]
- Baures R, Oberfeld D, Hecht H. Judging the contact-times of multiple objects: Evidence for asymmetric interference. Acta Psychologica. 2010;134:363–371. doi: 10.1016/j.actpsy.2010.03.009. [DOI] [PubMed] [Google Scholar]
- Baures R, Oberfeld D, Hecht H. Temporal-range estimation of multiple objects: Evidence for an early bottleneck. Acta Psychologica. 2011;137:76–82. doi: 10.1016/j.actpsy.2011.03.002. [DOI] [PubMed] [Google Scholar]
- Brewer MA, Fitzpatrick K, Whitacre JA, Lord D. Exploration of pedestrian gap-acceptance behavior at selected locations. Transportation Research Record: Journal of the Transportation Research Board. 2006;1982:132–140. [Google Scholar]
- Chardenon A, Montagne G, Buekers MJ, Laurent M. The visual control of ball interception during human locomotion. Neuroscience Letters. 2002;334:13–16. doi: 10.1016/s0304-3940(02)01000-5. [DOI] [PubMed] [Google Scholar]
- Chardenon A, Montagne G, Laurent M, Bootsma RJ. A robust solution for dealing with environmental changes in intercepting moving balls. Journal of Motor Behavior. 2005;37(1):52–64. doi: 10.3200/JMBR.37.1.52-62. [DOI] [PubMed] [Google Scholar]
- Chihak BJ, Plumert JM, Ziemer CJ, Babu S, Grechkin T, Cremer JF, Kearney JK. Synchronizing self and object movement: How child and adult cyclists intercept moving gaps in a virtual environment. Journal of Experimental Psychology: Human Perception and Performance. 2010;36(6):1535–1552. doi: 10.1037/a0020560. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Connelly ML, Conaglen HM, Parsonson BS, Isler RB. Child pedestrian's crossing gap thresholds. Accident Analysis and Prevention. 1998;30:443–453. doi: 10.1016/s0001-4575(97)00109-7. [DOI] [PubMed] [Google Scholar]
- Cremer J, Kearney J, Willemsen P. Directable behavior models for virtual driving scenarios. Transactions of the Society for Computer Simulation. 1997;14:87–96. [Google Scholar]
- DeLucia PR, Liddell GW. Cognitive motion extrapolation and cognitive clocking in prediction motion tasks. Journal of Experimental Psychology: Human Perception and Performance. 1998;24(3):901–914. doi: 10.1037//0096-1523.24.3.901. [DOI] [PubMed] [Google Scholar]
- Diamond A. Close interrelation of motor development and cognitive development and of the cerebellum and prefrontal cortex. Child Development. 2000;71:44–56. doi: 10.1111/1467-8624.00117. [DOI] [PubMed] [Google Scholar]
- Fajen BR, Warren WH. Visual guidance of intercepting a moving target on foot. Perception. 2004;33:689–715. doi: 10.1068/p5236. [DOI] [PubMed] [Google Scholar]
- Fajen BR, Warren WH. Behavioral dynamics of intercepting a moving target. Experimental Brain Research. 2007;180:303–319. doi: 10.1007/s00221-007-0859-6. [DOI] [PubMed] [Google Scholar]
- Fajen BR, Matthis JS. Direct perception of action-scaled affordances: The shrinking gap problem. Journal of Experimental Psychology: Human Perception and Performance. 2011;35(5):1442–1457. doi: 10.1037/a0023510. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Gibson JJ. The ecological approach to visual perception. Hillsdale, NJ: Erlbaum; 1979. [Google Scholar]
- Guth D, Ashmead D, Long R, Wall R, Ponchillia P. Blind and sighted pedestrians' judgments of gaps in traffic at roundabouts. Human Factors. 2005;47:314–331. doi: 10.1518/0018720054679533. [DOI] [PubMed] [Google Scholar]
- Hosmer DWJ, Lemeshow S. Applied Logistic Regression. Hoboken: John Wiley & Sons; 2000. [Google Scholar]
- Hunt M, Harper DN, Lie C. Mind the gap: Training road users to use speed and distance when making gap-acceptance decisions. Accident Analysis and Prevention. 2011;43:2015–2023. doi: 10.1016/j.aap.2011.05.020. [DOI] [PubMed] [Google Scholar]
- Ivry RB, Keele SW. Timing functions of the cerebellum. Journal of Cognitive Neuroscience. 1989;1:136–152. doi: 10.1162/jocn.1989.1.2.136. [DOI] [PubMed] [Google Scholar]
- Keele SW, Ivry RB. Does the cerebellum provide a common computation for diverse tasks? A timing hypothesis. Annals of the New York Academy of Sciences. 1990;608:179–211. doi: 10.1111/j.1749-6632.1990.tb48897.x. [DOI] [PubMed] [Google Scholar]
- Lee DN. Guiding movement by coupling taus. Ecological Psychology. 1998;10:221–250. [Google Scholar]
- Lee DN, Bootsma RJ, Frost BJ, Land M, Regan D, Gray R. Lee's 1976 paper. Perception. 2009;38:837–858. [Google Scholar]
- Lee DN, Young DS, McLaughlin CM. A roadside simulation of road crossing for children. Ergonomics. 1984;27:1271–1281. [Google Scholar]
- Lobjois R, Cavallo V. Age-related differences in street-crossing decisions: The effects of vehicle speed and time constraints on gap selection in an estimation task. Accident Analysis and Prevention. 2007;39:934–943. doi: 10.1016/j.aap.2006.12.013. [DOI] [PubMed] [Google Scholar]
- Mostofsky SH, Reiss AL, Lockhart P, Denckla MB. Evaluation of cerebellar size in attention-deficit hyperactivity disorder. Journal of Child Neurology. 1998;13:434–439. doi: 10.1177/088307389801300904. [DOI] [PubMed] [Google Scholar]
- Oudejans RR, Michaels CF, Bakker FC, Dolne MA. The relevance of action in perceiving affordances: Perception of catchableness of fly balls. Journal of Experimental Psychology: Human Perception and Performance. 1996;22:879–791. doi: 10.1037//0096-1523.22.4.879. [DOI] [PubMed] [Google Scholar]
- Pitcairn TK, Edlmann T. Individual differences in road crossing ability in young children and adults. British Journal of Psychology. 2000;91:391–410. doi: 10.1348/000712600161899. [DOI] [PubMed] [Google Scholar]
- Plumert JM. Relations between children's overestimation of their physical abilities and accident proneness. Developmental Psychology. 1995;31:866–876. [Google Scholar]
- Plumert JM, Kearney JK, Cremer JF. Children's perception of gap affordances: Bicycling across traffic filled intersections in an immersive virtual environment. Child Developmen,t. 2004;75:1243–1253. doi: 10.1111/j.1467-8624.2004.00736.x. [DOI] [PubMed] [Google Scholar]
- Plumert JM, Kearney JK, Cremer JF. Children's road crossing: A window into perceptual-motor development. Current Directions in Psychological Science. 2007;16:255–258. doi: 10.1111/j.1467-8721.2007.00515.x. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Plumert JM, Kearney JK, Cremer JF, Recker KM, Strutt J. Changes in children's perception-action tuning over short time scales: Bicycling across traffic-filled intersections in a virtual environment. Journal of Experimental Child Psychology. 2011;108:322–337. doi: 10.1016/j.jecp.2010.07.005. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Rivara FP, Aitken M. Prevention of injuries to children and adolescents. Advances in Pediatrics. 1998;45:37–72. [PubMed] [Google Scholar]
- Schiff W, Oldak R. Accuracy of judging time to arrival: Effects of modality, trajectory, and gender. Journal of Experimental Psychology: Human Perception and Performance. 1990;16:303–316. doi: 10.1037//0096-1523.16.2.303. [DOI] [PubMed] [Google Scholar]
- te Velde AF, van der Kamp J, Barela JA, Savelsbergh GJP. Visual timing and adaptive behavior in a road-crossing simulation study. Accident Analysis and Prevention. 2005;37:399–406. doi: 10.1016/j.aap.2004.12.002. [DOI] [PubMed] [Google Scholar]
- te Velde AF, van der Kamp J, Savelsbergh GJP. Five- to twelve-year-olds' control of movement velocity in a dynamic collision avoidance task. British Journal of Developmental Psychology. 2008;26(1):33–50. [Google Scholar]
- Tiemeier H, Lenroot RK, Greenstein DK, Tran L, Pierson R, Giedd JN. Cerebellum development during childhood and adolescence: A longitudinal morphometric MRI study. Neuroimage. 2010;49:63–70. doi: 10.1016/j.neuroimage.2009.08.016. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Tresilian JR. Perceptual and cognitive processes in time-to-contact estimation: Analysis of prediction-motion and relative judgment tasks. Perception and Psychophysics. 1995;57:231–245. doi: 10.3758/bf03206510. [DOI] [PubMed] [Google Scholar]
- Vasudevan EVL, Torres-Oviedo G, Morton SM, Yang JF, Bastian AJ. Younger is not always better: Development of locomotor adaptation from childhood to adulthood. The Journal of Neuroscience. 2011;31:3055–3065. doi: 10.1523/JNEUROSCI.5781-10.2011. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Wachtel A, Lewiston D. Risk factors for bicycle-motor vehicle collisions at intersections. ITE (Institute of Transportation Engineers) Journal. 1994;64(9):30–35. [Google Scholar]
- Willemsen P, Kearney J, Wang H. Ribbon networks for modeling navigable paths of autonomous agents in virtual environments. IEEE Transactions on Visualization and Computer Graphics. 2006;12(3):331–342. doi: 10.1109/TVCG.2006.53. [DOI] [PubMed] [Google Scholar]
- Young DS, Lee DN. Training children in road crossing skills using a roadside simulation. Accident Analysis & Prevention. 1987;19(5):327–341. doi: 10.1016/0001-4575(87)90020-0. [DOI] [PubMed] [Google Scholar]