

Abstract
In the rubber hand illusion, tactile stimulation seen on a rubber hand, that is synchronous with tactile stimulation felt on the hidden real hand, can lead to an illusion of ownership over the rubber hand. This illusion has been shown to produce a temperature decrease in the hidden hand, suggesting that such illusory ownership produces disownership of the real hand. Here, we apply immersive virtual reality (VR) to experimentally investigate this with respect to sensitivity to temperature change. Forty participants experienced immersion in a VR with a virtual body (VB) seen from a first-person perspective. For half the participants, the VB was consistent in posture and movement with their own body, and in the other half, there was inconsistency. Temperature sensitivity on the palm of the hand was measured before and during the virtual experience. The results show that temperature sensitivity decreased in the consistent compared with the inconsistent condition. Moreover, the change in sensitivity was significantly correlated with the subjective illusion of virtual arm ownership but modulated by the illusion of ownership over the full VB. This suggests that a full body ownership illusion results in a unification of the virtual and real bodies into one overall entity—with proprioception and tactile sensations on the real body integrated with the visual presence of the VB. The results are interpreted in the framework of a ‘body matrix’ recently introduced into the literature.
Keywords: body ownership, body representation, virtual reality, temperature sensitivity threshold, rubber hand illusion, skin temperature cooling
1. Introduction
The question of ‘who am I?’ is a fundamental one in philosophy, and is intimately tied up with the relationship between our ‘self’, our consciousness, and the body in which the self and consciousness are intertwined [1]. From a common sense point of view, our body seems to be a relatively stable entity—we look in the mirror every day and see reflected back the same body which signifies the same ‘self’. The body does change through time, but imperceptibly. The idea that our body may be trivially mutable seems counterintuitive. Yet, since the publication by Botvinick & Cohen [2] showing that it is extremely simple to generate in people the illusion that a rubber arm is part of their body, there has been renewed and significantly growing interest in the study of the brain's body representation.
The rubber hand illusion (RHI) described in Botvinick & Cohen [2], and earlier work such as Lackner [3], therefore suggest that the brain's body representation is highly plastic, with the possibility of rapid illusory incorporation of fake or virtual body (VB) parts, and even illusory attribution of a surrogate whole body as the own body [4–6]. These results have also been shown to operate with body surrogates presented in virtual reality (VR; [7–12]). In all cases, the illusion of body part or full body ownership is induced by multimodal stimulation. This is typically achieved through visuotactile stimulation where the surrogate limb (or body) is seen to be tapped and stroked, whereas the tactile stimulation is applied synchronously in time and with correct location on the real body which is visually obscured. It has also been shown to be induced through visuomotor rather than visuotactile synchronous stimulation [13,14]. A critical factor is that the surrogate body be seen by the participant from a first-person perspective (1PP) with respect to the eye position of that body and where the body apparently visually substitutes the real body [9,12,15].
These illusions do not operate only subjectively but cause observable physiological responses. When the surrogate limb such as the rubber hand or full body is threatened there is a significant arousal or stress response [6,9,16]. It has also been shown that illusory ownership has strong links with the homeostatic system. For example, in Moseley et al. [17] it was shown that the RHI provokes a temperature reduction of the corresponding real hand, but not of other parts of the body. This has also been extended to the full body illusion with the body seen from third-person perspective [18]. The converse also seems to be the case: reducing limb temperature can modulate the intensity of the RHI [19].
In this paper, we report an experiment that extends the range of observable physical phenomena associated with the whole body illusion. We wondered whether a full body ownership illusion would result in a type of neglect of physical events on the real body—in particular, whether there would be any change in sensitivity of participants to small changes in temperature of a device applied to the hand. We expected, akin to cooling of the real hand in the RHI, that a strong illusion of ownership of a full VB would lead to a reduction in sensitivity to temperature changes, thus supporting the idea that ownership of a VB implies some neglect of the real body. However, the results suggested the opposite—that a full body ownership illusion results in the unification of the virtual and real body without such neglect. Nevertheless, a weak illusion of full VB ownership but combined with a stronger illusion of ownership of the virtual hand is associated with lesser sensitivity to temperature changes of the real hand. We consider the results in the context of the idea of a ‘body matrix’ introduced in Moseley et al. [20].
2. Material and methods
2.1. Overview of the experimental scenario
The participants’ real bodies were substituted by a VB as seen through a head-tracked stereo wide field of view (FOV) head-mounted display (HMD; figure 2). They could see the VB directly when looking down towards themselves and also as reflected in a virtual mirror. The body was either in a posture consistent with that of the real body and with the virtual right arm movements temporally and spatially synchronous with real right arm movements (consistent condition), or alternatively in an unusual posture, not consistent with the real one, and with spatial position and movements of the virtual right arm inconsistent with those of their real right arm (non-consistent condition). The temperature sensitivity threshold (TST) of participants was measured before they entered the VR, and immediately after they had experienced the virtual embodiment in one of the two conditions. Once they had experienced one condition and answered a questionnaire, they were exposed to the second one, where the procedures were repeated.
Figure 2.

First-person perspective of the body and the view in the virtual mirror. (a) A stereo pair of the scene when the participant looks down towards himself. (b) The participant moving an arm. (c) A view in the mirror of arm movements. (b,c) are not meant to be corresponding images.
2.2. Equipment
The HMD used was an NVIS SX111 with a resolution of 1280 × 1024 and a FOV of 76°H × 64°V per eye with overall resolution 2560 × 1024 and an overall FOV of 111°H × 64°V. It has a 60 Hz display refresh rate. The virtual environment was programmed on a PC with graphics card GeForce 480GTX. Head-tracking was achieved with the 6-DOF Intersense IS-900 device. Additionally, the right hand of the participants was tracked using the Optitrack optical tracking system (http://www.naturalpoint.com/optitrack/). An optical marker was put on the back of the participant's right hand, which was used for position and orientation tracking.
TST was obtained with a computer-aided sensory evaluator (CASE) IV thermal stimulator (figure 1a). This consists of a thermoelectric unit which has a linear ramp of cooling and warming of 4° s−1. The device was placed on the floor to the right of the participants and they were required to position the palmar of their right hand on the measuring device. During the recording periods, depending on the condition, participants would see or not their virtual hand resting on the virtual counterpart of the device. The device was first adjusted to the temperature of the hand of the participants, and then 20 readings were taken at different temperature values. At each reading, the participant was required to say whether he felt any temperature change or not. The computer program associated with the device then computed the threshold temperature in degrees Celsius [21].
Figure 1.
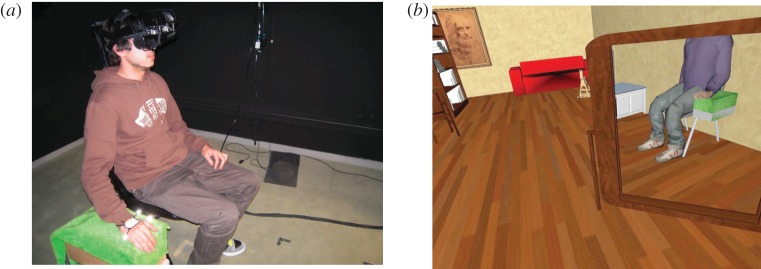
The CASE IV temperature sensitivity recording device, and its virtual counterpart. (a) Shows the position of the participant next to the device (b) the view in the virtual mirror. The real device and virtual counterpart are covered with a green cloth.
It should be noted that since TST measures the threshold at which there is a just noticeable difference in temperature, higher values of TST imply lower temperature sensitivity.
2.3. Experimental design
The experiment was designed as a within-groups experiment where each participant experienced the two conditions mentioned above—referred to as the consistent condition (C) and the non-consistent condition (N). In the C condition, the VB was in a normal-seated posture with the left hand hanging down the side and where the right hand and arm moved synchronously in time and space with the real counterparts. In the N condition, the VB was also seated but remained throughout the experiment in an unusual posture and the right arm movements were not the same as the movements of the real right arm (hence the virtual arm was also displaced from the real arm). The participant would see the virtual arm move as soon as he moved his actual arm, but the movements would differ. Earlier pilot experiments had shown that it was quite difficult to find a condition where participants did not have the illusion of ownership over the collocated VB experienced from 1PP. We examined many different possibilities until we found that the ownership illusion tended to diminish with both non-synchronous arm movement and non-consistent body posture.
Forty male participants were recruited from around the university campus, and assigned arbitrarily to one of the two groups: N condition followed by C condition (NC) or the opposite order (CN). Each group had the same number of participants. The two conditions were presented in counter-balanced order. However, it turned out that there was a very strong asymmetry between these two groups with respect to their questionnaire responses and TST measures (see the electronic supplementary material), so treating this as a within-groups design was inappropriate. Hence for the purposes of analysis, we have considered only the first exposures of each group, making this a between-groups design with 20 participants per group. We refer to the groups as N and C—the group that received the N condition or C condition as their first exposure, respectively, and results from the second exposure were discounted.
2.4. Participants
The mean age of participants was 23 ± 5 years with no significant difference between the two groups.
2.5. Procedures
When participants arrived at the VR laboratory, an outline of the procedures and experiment was explained to them, and they were asked to sign a consent form. The operator gave them a pullover to wear of the same colour as the one worn by the VB in the VR and then adhered the Optitrack marker on the dorsal area of their right hand. They were asked to move the hand to verify the marker was well fixed. They were then invited to sit on a chair on which they remained throughout the experimental procedures.
The procedures for the TST recording were explained to them. They were given a series of test trials in order to become used to the task and understand the requirements. The number of test trials was between three and eight, and the intensity changes were chosen by the operator. The training phase stopped once the participant recognized the stimuli, and gave at least one affirmative and one negative answer indicating perception of the stimuli. Then 20 readings were administered using an adaptive procedure [21]. This resulted in the first TST reading that we denote as tReal.
Then the participants donned the HMD (which also housed the Intersense head-tracker) with eyes closed and it was adjusted so that it was comfortable. When the participants opened their eyes, they were in a virtual room of size 7.6 × 3.9 × 2.7 m high with some furniture (figure 2c). They were told to sit in a posture with their left hand hanging down at their side and their feet flat on the floor. They were told that they could move their right hand and head but no other part of their body. Then they were manoeuvred into the same posture as the VB. In particular, the virtual right hand was carefully adjusted in order that its position and orientation was consistent with the real hand. In order that the participant would experience it to be in the same position as his real hand, the position of the virtual hand and also the virtual counterpart of the CASE IV were adjusted. The position of their body with respect to the chair and the box was calibrated so that it appeared to be in the correct position from the point of view of each participant individually. The tracking information available was the position and orientation of the hand, and therefore the rotation of the shoulder and both the position and rotation of the elbow were inferred with inverse kinematics.
To acclimatize to the virtual environment and to confirm they could see correctly through the HMD, they were asked to look around and describe the scene they saw (figure 2). One of the elements in this scene was a green box (representing the CASE IV) immediately to their right. Then they were asked to look down at themselves, and they would see a male VB substituting their own and seated on a virtual replicate of the chair (figure 2a). The VB could also be seen as reflected in a virtual mirror. In addition, to avoid rejection of the VB because of it having a face different to that of the participant, the mirror was placed in such a way that the participant only saw the reflection from the neck down (figure 2c).
After the adjustment phase, the participant was asked to briefly close his eyes and the experiment started, either in the N or in the C condition. Participants were encouraged to move their right arm, and they would see the arm and hand move both from a 1PP and also as reflected in the mirror. Figure 3 contrasts the C and N conditions. In the C condition, the movement of the virtual right hand was synchronous with the real hand, whereas in the N condition this was not the case, but instead the arm moved triggered by movements of the real arm but the movement was not the same as the movement of the real hand.
Figure 3.
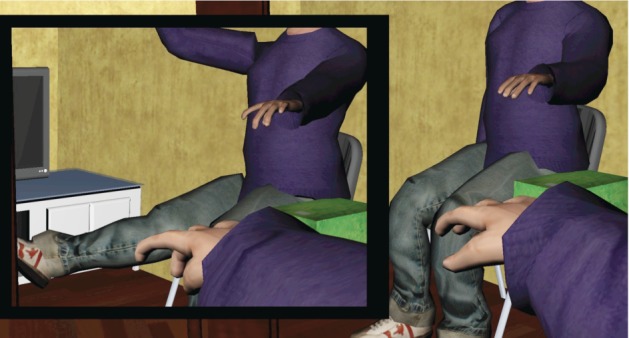
Contrasting the C and N conditions. The inset shows an example of the N condition, where the avatar is in a strange posture, and the virtual and real hand movements and position do not match. The right image shows a snapshot from the C condition, where the character is seated normally and the real and virtual hand movement match. In the N condition, the position of the real hand did not correspond with the position of the virtual hand, whereas it did in the C condition.
To ensure that participants in the N condition did not feel a spatial congruency between their arm movements and the movements of the virtual arm and hand, three distortions were introduced. First, the update of the virtual hand position was delayed by 1 s. Second, to ensure that there was no congruency felt between the real and the virtual arm, the rotation of the virtual hand was not delayed but the x and y axes of rotations were swapped. This introduced movements that were still physically possible but, combined with the delayed position, prevented an identification with the real movements. Third, in order to reduce the probability of limb ownership due to some collocation of the real hand and the virtual one, when the physical hand approached within 40 cm of the CASE IV box, a progressive displacement was introduced in order that virtual hand deviated upwards and away from it. As a result, when the real hand was exactly at the initial position, on the CASE IV, the virtual arm was extended upwards by 1.5 m above the virtual counterpart of the CASE IV.
Over a period of 2 min, participants were encouraged to move their hand in different ways: towards the left, the right, look at their palm, the back of their hand and so on (figure 2b,c). They were also asked to look down at themselves and at the mirror. They were also encouraged to pay attention to the details of their virtual hand such as the fingernails. In addition to this, at various moments they were asked to point to some of the objects in the scene they had previously described: for example, to point at a painting on the wall in front. They were asked to do this pointing task three times during the 2 min.
After this period, they were asked to place their hand on the CASE IV. In the C condition, the virtual hand followed. In the N condition, the virtual hand remained in a position above the CASE IV. Then there were another 20 sensitivity readings, resulting in the TST measure that we denote as tVR.
After the completion of these readings, participants were asked to close their eyes and also the screens were blanked, and they were asked a number of questions (see below). Then the experimental trial was repeated in the other condition where all procedures were the same.
2.6. The questionnaire
There were four questions answered immediately following each of the two exposures, and while the participant was still wearing the HMD, as shown in table 1. The scale and the questions were read out to the participants by the experimenter who noted down the answers.
Table 1.
The post experience questionnaire.
| not at all 0 1 2 3 4 5 6 7 8 9 10 very much |
| Q1. (own) How much did you feel that the virtual body was your body? |
| Q2. (move) How much did you feel that the movements that the virtual body made were your movements? |
| Q3. (another) How much did you feel that the virtual body was another person? |
| Q4. (arm) How much did you feel the virtual arm belonged to you? |
2.7. The temperature sensitivity threshold readings
Each participant completed the TST test before entering the VR (tReal), and then in the VR after the period of 2 min (tVR). It should be noted again that greater values of tReal or tVR indicate less sensitivity to temperature changes. We define Δt = tVR − tReal. When Δt > 0 there is less sensitivity to temperature changes in the VR compared with physical reality.
3. Results
3.1. Questionnaire scores
Figure 4 shows the questionnaire scores. It is clear that the N and C conditions had the required effect, generally the scores are higher in the C condition than the N for Q1 (own), Q2 (move) and Q4 (arm), and lower for Q3 (another).
Figure 4.
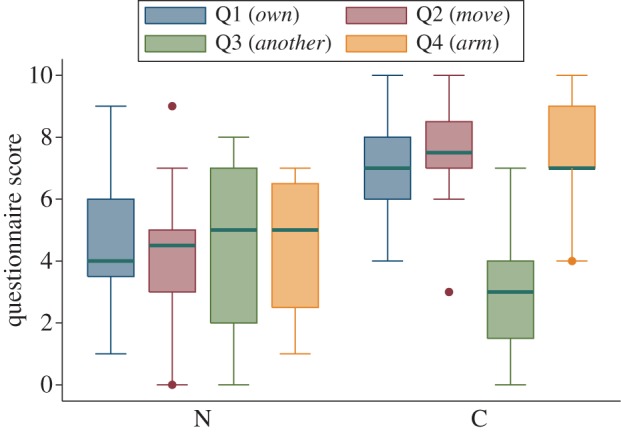
Boxplots for the questionnaire scores for condition N and C. The central horizontal lines are the medians, and the upper and lower edges of the boxes are the 25 and 75 percentiles. The whiskers extend to the minimum and maximum data points if these are not outliers. Outliers are shown separately and are outside the bounds of 1.5 times the interquartile range below or above the 25 and 75 percentiles, respectively. In this case, the length of the whisker extends to 1.5 times the interquartile range.
Comparison of the C scores with the corresponding N scores show that the differences between them for Q1, Q2 and Q4 are highly significant: Q1: p = 0.0002, Q2: p < 0.00005, Q4: p < 0.00005. For Q3, the difference has significance p < 0.11. All significance levels are two-sided, using the Wilcoxon's rank-sum non-parametric test.
The primary purpose of the C and N conditions was to find VB configurations that would provide a sufficient range of the degree of subjective body ownership, and this succeeded.
3.2. Temperature sensitivity threshold
Here, we compare Δt between the N and C groups. The mean and standard errors for the two groups are N: −0.06 ± 0.10 and C: 0.29 ± 0.07. One-way ANOVA shows that the means are significantly different at p = 0.007. However, inspection of the scatter diagram of tVR on tReal shows possible heteroscedasticity (variance of tVR increasing with tReal) and the Shapiro–Wilk test for normality of the residuals is marginal (p = 0.06). Figure 5a shows that this is resolved by working on a log scale. Let Δlogt = log(tVR/tReal), which has mean ± s.e. N: 0.008 ± 0.102 and C: 0.401 ± 0.095. ANOVA shows these to be significantly different (p = 0.008). The Shapiro–Wilk test for normality of the residuals has p > 0.8. (See the electronic supplementary material, figure S2.)
Figure 5.

Scatter plots for TST and questionnaire responses. (a) Scatter plot of tVR by tReal on the log scale, with regression lines for analysis of covariance with condition as the factor. Here, R2 = 0.49 and the significance levels for the slope and intercept are p < 0.0005 and p = 0.02, respectively. Blue solid line denotes fitted values (N) and red solid line denotes fitted values (C). Blue circles denote N and red circles denote C. (b) Scatter diagram of Δlogt on Q4 (arm); R2 = 0.23, p < 0.002. (c) Scatter diagram of Q4 on log(tReal); R2 = 0.16, p = 0.011. (d) Scatter plot of Δlogt on R = Q4 × (1 − Q1/10) by condition; R2 = 0.38, significance levels for slope and intercept are p = 0.001 and p = 0.003, respectively. Blue circles denote N and brown circles denote C. All tests satisfy normality requirements on the residual errors of the corresponding regression equation using the Shapiro–Wilks test (all p for residual errors compatible with a normal distribution p > 0.12).
3.3. Relationship between temperature sensitivity threshold and the body ownership illusion
Section 3.2. shows that the change in TST is greater for the C group than for the N group. However, we also need to consider the relationship between the subjective illusion of body ownership and the TST. Figure 5b shows a positive and significant correlation of Q4 (arm) with Δlogt, suggesting that the greater the level of perceived ownership of the virtual arm the more impaired is the sensitivity to temperature changes. However, we have seen that condition (N, C) is significantly related with Δlogt and also with the questionnaire responses. Therefore, it is possible that the correlation between Q4 and Δlogt is spurious. We can test this using path analysis [22] which can be used to simultaneously model the relationships between condition, Q4 and Δlogt. This is shown in figure 6a, which has the interpretation that the C condition influences Q4 positively, which in turn positively influences Δlogt. A direct path added from condition to Δlogt is, however, not significant.
Figure 6.

Path diagrams for decomposition of influences on Δlogt and R. (a) Path analysis for Δlogt on condition and Q4. (b) Path analysis for Δlogt including the effect of log(tReal). (c) Full path analysis. The path analyses use the asymptotic distribution free method for estimation and significance testing (and hence do not rely on multivariate normal assumptions). The annotations on the path lines indicate the path coefficient (with the corresponding significance level in brackets). The curved path represents the inclusion of a covariance term between the connected items.
There is also another issue to consider. In Tsakiris et al. [23], it was reported that susceptibility to the RHI varies with interoceptive sensitivity. It is possible that susceptibility to the body ownership illusion considered here may similarly vary with exteroceptive (thermal) sensitivity. This does seem to be the case with respect to Q4 (arm). Figure 5c shows the scatter plot of Q4 on log(tReal), demonstrating a significant negative slope. There are no significant correlations with the other questionnaire variables. This suggests that the greater the exteroceptive (thermal) sensitivity the greater the susceptibility to the illusion of owning the virtual arm. However, because we have found that log(tReal) is correlated with Q4 and log(tReal) is obviously correlated with Δlogt = log(tVR) − log(tReal), the correlation between Q4 and Δlogt may be spurious. Figure 6b shows a path diagram that incorporates these various possibilities, and the result is that even taking into account these correlations, the relationship between Q4 and Δlogt remains significant.
When Q1 (own) is added into the path diagram then this also is shown to have a significant relationship with Δlogt (but not the other two questionnaire variables). The value of path analyses in these complex situations is that they support the simultaneous modelling of relationships between several variables, through modelling the total covariance matrix. In the fit shown in figure 6c, condition is significant. What is strange, however, is that Q1 (own) is negatively related to Δlogt, whereas Q1 (arm) is positively related. This led us to suspect that there might be an interaction between Q1 and Q4. When Q1 × Q4 is added into the model, Q1 drops out of significance, the coefficient of Q1 × Q4 is negative and almost exactly one-tenth of the coefficient of Q4. This seemed too much of a coincidence given that the range of values of the questionnaire variables is from 0 to 10.
The above suggested that the variable of interest could be R = Q4(1 − Q1/10). When this variable is used in the path analysis in place of Q1 and Q4, it simplifies the model considerably, because neither log(tReal) nor condition are significantly related to R. Hence, we are left with three uncorrelated contributions to Δlogt, which are condition, log(tReal) and R, whereupon the path analysis becomes equivalent to regression analysis. The scatter diagram of Δlogt on R is shown in figure 5d, and the results of the regression analysis shown in table 2. In this model, condition C has a positive influence on Δlogt and so has R. It is remarkable that R, which is of course totally constructed out of the subjective questionnaire scores, has almost the same influence on Δlogt as log(tReal) (judging by the partial η2 effect sizes), even though the latter is bound, by construction, to be strongly correlated.
Table 2.
Regression analysis for Δlogt n = 40, F3,36 = 12.43, p < 0.00005, R2 = 0.51
| variable | coefficient | s.e. | t | p | partial η2 |
|---|---|---|---|---|---|
| constant | −0.45 | 0.13 | −3.40 | 0.002 | |
| log(tReal) | −0.31 | 0.10 | −3.11 | 0.004 | 0.21 |
| condition(N = 0, C = 1) | 0.31 | 0.11 | 2.78 | 0.009 | 0.18 |
| R = Q4(1 − Q1/10) | 0.15 | 0.05 | 2.94 | 0.006 | 0.19 |
It is important to note that the regression equation should not be thought of as a normal mathematical equation, i.e. that Δlogt ∝ Q4 (1 − Q1/10), where Q1 and Q4 are each free to range independently over their possible values (0,1, … ,10). In fact, Q1 and Q4 are highly positively correlated (r = 0.66, p < 0.00005), with −3 ≤ Q4 − Q1 ≤ 4 and this must be taken into account in interpretations of the regression result, discussed below.
4. Discussion
4.1. The subjective illusion of body ownership
This experiment adds to the literature on the subjective illusion of ownership of a VB. The results show that it is possible to produce a quite strong subjective illusion of ownership of a collocated VB that is seen from a 1PP position and in a virtual mirror, where the body is in the same posture and the virtual right hand is slaved to the movements of the real right hand. When the body posture is not consistent with that of the real body and the movements of the virtual right hand are asynchronous and different than those of the real hand then the subjective illusion is significantly lower (though not eliminated).
Various aspects of this result have been found before Slater et al.[9] and Sanchez-Vives et al. [13]. The critical importance of 1PP in leading to the full body ownership illusion has been shown, for example, in Maselli & Slater [12] and Petkova et al. [15]. During the pilot studies, it was difficult to find a condition in which there was a reduced ownership illusion when there was embodiment with a collocated body seen from 1PP. In the study reported in de la Pena et al. [24], it was found that when someone is put virtually in a posture that is not their actual one but where that posture is feasible even if uncomfortable, then participants have the illusion of being in that posture, even experiencing the discomfort that would normally go with it. In the current experiment, we found that by having an implausible (but physically realizable) body posture and the inconsistent virtual arm movements, we were able to attain a wide range of ownership questionnaire scores. Even so, note that the ranges of body illusion questionnaire scores for the N condition were relatively high (figure 4). In summary—a degree of subjective ownership over a collocated VB seen from 1PP seems to be the normal response, and not an exceptional one.
4.2. Temperature sensitivity as a predictor of virtual arm ownership
TST measured prior to entering VR was negatively associated with the subjective illusion of ownership over the virtual arm (figure 5c). In other words, greater sensitivity to temperature changes prior to the virtual embodiment (lower TST) was associated with a greater subjective illusion of arm ownership. It was reported in Tsakiris et al. [23] that susceptibility to the RHI increases with lower interoceptive sensibility (specifically own heart beat detection). In Mirams et al. [25], it was found that when participants were asked to pay attention to interoceptive processes (own heart beats), they were more likely to report the feeling of touch in a somatic signal detection task, and less likely to report touch when they had been asked to increase exteroceptive attention. In the current experiment, participants had been asked to pay attention to exteroceptive signals prior to their virtual embodiment, and lower TST was associated with higher subjective illusion specifically of the hand of the arm used for the temperature sensitivity readings. Putting this together, a conjecture would be that lower interoceptive sensitivity and higher exteroceptive sensitivity could be predictors of the likelihood of the virtual arm illusion. Of course, it is the case that we did not attempt to manipulate exteroceptive sensitivity as such, but only attention to this, but this conjecture is a reasonable claim from our own results together with these two papers.
4.3. Temperature sensitivity threshold and disownership
In the body ownership literature, a drop in surface skin temperature of the experimental hand in the context of the RHI has been taken to mean disownership of the hand, a corollary of ownership of the rubber hand [17]. It might be thought that a change in TST on the experimental hand is simply a by-product of that hand's cooling. However, an experiment reported in Hilz et al. [26] found almost no correlation between thermal sensitivity threshold and skin temperature when taken over a set of locations on the body. Hence, changes in TST should be considered as independent of cooling. It is possible that TST changes from tReal (before entering the VR) to tVR (during the VR) might simply reflect the degree of attention required in the two conditions. This is unlikely, however, because the TST readings were taken while nothing else was happening, when the participants were told to keep their hand still resting on the device while observing their virtual hand. If it were the case that the change in TST was due solely to attention, then we would expect Δlogt to be the same across the two experimental conditions.
An experimental study reported in Toibana et al. [27] found that thermal sensitivity threshold testing is a valid method for assessment of small sensory nerve fibre injury in the hands owing to vibration induced neuropathy. There was a significant difference in thermal sensitivity threshold between patients and controls, and thermal sensitivity threshold testing correlated strongly with vibration and pain threshold testing, both used in a standard method for assessment of this condition. We conclude from this that a change in TST indicates an objective recalibration of sensitivity probably across a range of sensations. Now it is a big step to associate this recalibration with ‘disownership’, but following the terminology used in earlier literature, we here cautiously suggest that the term ‘disownership’ also include this objective recalibration.
4.4. Temperature sensitivity and cross-modal congruence
The fundamental result of this paper is given in equation (4.1),
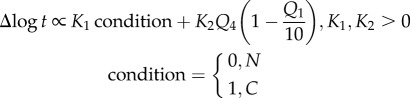 |
4.1 |
This result shows that the experimental manipulation (condition) did result in significantly greater change in TST in the congruent than in the non-congruent condition. Moreover, equation (4.1) also shows that, other things being equal, the TST increases with greater subjective ownership of the virtual arm (Q4). This can be taken as analogous to the finding in Moseley et al. [17] of a temperature drop in the experimental arm in the RHI which is correlated with subjective strength of the illusion, but is an independent result due to the lack of correlation between thermal sensitivity and skin temperature [26].
In Folegatti et al. [28], evidence was presented that the result found in Moseley et al. [17] of a decrease in temperature of the experimental arm may have been solely owing to cross-modal incongruence rather than the subjective illusion of rubber hand ownership. The experiment reported in this paper is consistent with this interpretation in the thermal threshold domain because the finding is clear that the C condition is associated with a higher threshold. However, the results are also consistent with Moseley et al. [17], because the path analysis showed that even allowing for a direct effect of the experimental condition on the threshold change there is an effect of the subjective illusion of arm ownership. Another way to see this is that the two terms on the right-hand side of equation (4.1) are uncorrelated, so that their contribution to the response on the left-hand side can be considered as separate.
Equation (4.1) suggests that the full body ownership illusion (Q1) modulates the impact of the virtual arm ownership illusion (Q4) on the TST change. When whole body ownership (Q1) is high, then there is little or no effect of the arm illusion (Q4) on the TST change. Q4 is only associated with a positive change in TST (less sensitivity) when the overall body ownership illusion is low, and the lower it is the greater the possible contribution. However, bearing in mind that Q1 and Q4 are correlated, even when Q1 = 0, Q4 ≤ 4, so that low levels of body ownership are also associated with low arm ownership. Our interpretation of these findings is that if the ownership illusion is very strong, then because the VB is coincident with the real body, there is no substantive change in the relationship of the self with the ‘owned’ body. It is where it is normally supposed to be—only its facade has changed.
How does this relate to the issue of ‘ownership’ and ‘disownership’ in the context of these illusions? We believe our data support the notion that when there is a whole body ownership illusion, in the context of a VB substituting the real body and seen from 1PP, that the VB and real counterpart become unified in one overall body representation. There is no disownership of the real body in this case, but rather the real and VB become one. The participant moves his body and sees the VB move correspondingly and similar to how she or he has moved and seen the real body move throughout life. The proprioception and associated tactile sensations due to movement (e.g. brushing of clothing against the skin) of course arise from the real body. However, the visual body is the virtual one. Hence, the real body is providing the sensory data that is unified with the visual VB. In this case, there is no cross-modal conflict between real and VB but rather they become a unified totality. There is no disownership of the real body or of the real hand in this case, but rather there is a ‘gestalt’ that integrates all.
The 1PP with respect to a VB that substitutes the real body is critical in this interpretation. This was shown in its most extreme form in Guterstam & Henrik Ehrsson [29] for the whole body: when the visual centre of awareness of participants was located outside of their own body, it was perceived as not being part of themselves and subjectively disowned. There is further evidence of this in Salomon et al. [18] where it is shown that when the VB is seen from third-person perspective then there is also a reduction in temperature at different points on the body, akin to Moseley et al. [17].
These ideas fit well with the notion of a ‘body matrix’ representation in the brain that integrates visual, proprioceptive and tactile input, and personal and near surrounding space (peripersonal space), from a body centred reference frame [20]. This body matrix maintains the psychological integrity of the body and interrelates perceptual, and cognitive representations and homeostatic controls. We propose that this includes sensitivity to skin-contact surface temperature change, and in all likelihood to other aspects of sensitivity such as tactile, vibrational and pain thresholds.
The body matrix can also accommodate changes to the body structure by integrating sensory data that provides evidence for such changes. For example, when the body appears to have changed, and when the evidence of this change is provided through consistent multisensory data pointing to a new interpretation of body structure, then the body matrix propagates the change to all levels—perceptual, cognitive, personal and peripersonal space, regulatory function and protection mechanisms. Therefore, we propose that the body matrix has a hierarchical structure, where global body ownership is at the top level, and changes at this level ripple through all lower levels of the hierarchy. It has been shown that neural activation associated with whole body ownership is triggered through the stimulation of ownership of individual body parts [30]. Also it was found in Tsakiris & Haggard [31] that there is a part–whole relationship with respect to the hand—for example, a synchronously stimulated finger carried with it ownership of a nearby unstimulated finger, but not an asynchronously stimulated nearby finger. Our model suggests that ownership can also be inherited from the top down, that subjective global body ownership is correlated with arm ownership, and that when global ownership is high then there is no disownership of the hand, rather it is integrated into an overall body matrix. In this case, the hand ‘inherits’ via the body matrix all the aspects normally associated with ownership, which do not differ from ownership of the physical body. It is important to realize that in the experiment of Petkova et al. [30], participants already saw the whole manikin body. Thus, while it may be the case that ownership of the whole body comes from the integration of body parts, it could also be the case that the 1PP view of the whole body (or whole hand) is already enough to integrate body parts lower down in the hierarchy (provided that there is no disruptive cross-modal stimulation of those parts).
An example of the ripple effect from global ownership of the whole VB can be found in the long arm illusion [10] where, from 1PP of a full VB, one arm was seen to be abnormally long, but displayed with visuomotor and visuotactile synchrony. When the hand of the arm was threatened, there was a defensive movement as if the real hand had been threatened. It may even be the case that changes to the body are propagated through the body matrix to concomitant cognitive and behavioural changes that ‘fit’ the changed body. For example, it has been shown (in a between-groups experiment where each participant was exposed to only one type of body) that when people are virtually embodied in a casually dressed dark-skinned body, they play an African hand drum with significantly greater body movement than when they are embodied in a formally dressed light-skinned body [32]. Moreover, the degree of objective difference in their drumming movement correlates with their level of subjective body ownership over the respective VB. The higher body ownership, the greater the difference between the movement involved in drum playing in the two bodies.
With regard to disownership of the real counterpart of the newly owned body part, Moseley et al. [20] argue that there are two possibilities (in the context of the RHI): either ‘(1) The rubber hand and the actual hand become unified, that is, there is some sense of disownership of the intact, actual hand; or else (2) … the dominant hand representation simply extinguishes the other representation … ’. We believe that there is a third possibility—which is that the rubber hand and real hand could become integrated but with each providing part of the information of a unified whole (the real hand providing the proprioceptive and tactile data, and the rubber hand the visual data). The real hand is not disowned but becomes part of the new unified entity, the real/rubber hand. On this matter, we note that all previous discussions of disownership have been with respect to a body part that is static during the experiment—immobile surrogate and real hands. In our case, the real experimental hand was moved by the participant, who saw (in the C condition) corresponding movement of the virtual arm and hand. Hence, there was a rich array of additional motor, proprioceptive and tactile sensations that is not present in the RHI, data that can be unified with the visual representation thus providing an overall unified owned entity, without the disownership of the experimental hand.
In this view, the body matrix plays a critical role in determining whether there will be this new unified entity without disownership of the real (experimental) hand. If we consider the standard RHI setup, prior to the onset of the illusion there is of course a body matrix representation, which incorporates the owned experimental hand but not the rubber hand. Through multisensory stimulation, the body matrix is updated and has to actively incorporate the rubber hand, and the evidence suggests disown the experimental hand. This appears to be the case even when the surrogate hand and real hand are apparently co-located [33]. However, in the case of embodiment in VR, the participant enters the VR, sees from 1PP the VB replacing the real one—both directly by looking down towards it and indirectly through mirror reflections (as in figure 2). In this case, already the body matrix is updated so that the VB is unified with the real body in one overall new encompassing body representation. The moving hand therefore does not have to be additionally incorporated—it already is so. For some individuals, even the non-congruent condition was enough to generate the illusion of body ownership thus updating the body matrix, so that large discrepancies between the position and movement of the virtual hand compared with the real were tolerated. This is analogous to Maselli & Slater [12] where it was shown that when there is a full body ownership illusion (through 1PP with respect to a VB that substitutes the real one) even asynchronous visuotactile stimulation was not perceived as incorrect. However, when there is a low level of body ownership, the body matrix remains associated with the real body so that, as in the RHI, the virtual arm has to be incorporated. This requires additional resources to accomplish, possibly even attentional resources, thus leading to ‘disownership’ of the experimental arm.
To conclude then we believe that the overall message of the study is that the full body ownership illusion drives the body matrix. When there is such a body ownership illusion, this is propagated to many different systems in the body matrix and there is, in this case, no contradiction to be resolved between the real and the VB. They become one overall entity—forming the body representation of the individual. When there is not a full body ownership illusion, then the ‘normal’ body matrix must be extended to incorporate alien body parts—but at the expense of disownership of the corresponding real body parts. We assert that the full body ownership illusion in VR is attained by virtually replacing the real body by the VB, and where the participant sees this VB from the viewpoint of where its eyes should be. If the participant is not allowed to move his or her limbs (except the head in order to look around), then this is already a sufficient condition [12]. If, however, the participant is able to move, (limbs and trunk) then a further requirement is that the VB must be seen to move correspondingly and synchronously in real time.
Our final point is that in our experiment, there was an asymmetry between results of the first and second trials, leading us to treat this as a between-groups experiment using only the first trial. In the electronic supplementary material, we provide an analysis of the within-groups setup and explain why there was this substantial asymmetry. The evidence suggests that this problem might apply to similar experiments reported in the literature. It should be a norm in this research field that when within-groups experimental designs are used that authors report on the issue of trial-to-trial symmetry.
Acknowledgements
The experiment was approved by the Ethics Committee of the University of Barcelona, and all participants gave their written informed consent to participate in the study.
This research was supported through the project TV3 Marató de Catalunya ‘Dolor Crónico’, the EU FP7 Future and Emerging Technologies project VERE (grant no. 257695) and the European Research Council project TRAVERSE (grant no. 227985). We thank Dr Josep Valls-Solé for making available the CASE IV machine. We thank Pere Sivecas for helping with the experiments.
References
- 1.Blanke O, Metzinger T. 2009. Full-body illusions and minimal phenomenal selfhood. Trends Cogn. Sci. 13, 7–13 10.1016/j.tics.2008.10.003 (doi:10.1016/j.tics.2008.10.003) [DOI] [PubMed] [Google Scholar]
- 2.Botvinick M, Cohen J. 1998. Rubber hands ‘feel’ touch that eyes see. Nature 391, 756. 10.1038/35784 (doi:10.1038/35784) [DOI] [PubMed] [Google Scholar]
- 3.Lackner J. 1988. Some proprioceptive influences on the perceptual representation of body shape and orientation. Brain 111, 281–97 10.1093/brain/111.2.281 (doi:10.1093/brain/111.2.281) [DOI] [PubMed] [Google Scholar]
- 4.Ehrsson HH. 2007. The experimental induction of out-of-body experiences. Science 317, 1048. 10.1126/science.1142175 (doi:10.1126/science.1142175) [DOI] [PubMed] [Google Scholar]
- 5.Lenggenhager B, Tadi T, Metzinger T, Blanke O. 2007. Video ergo sum: manipulating bodily self-consciousness. Science 317, 1096–1099 10.1126/science.1143439 (doi:10.1126/science.1143439) [DOI] [PubMed] [Google Scholar]
- 6.Petkova VI, Ehrsson HH. 2008. If I were you: perceptual illusion of body swapping. PLoS ONE 3, e3832. 10.1371/journal.pone.0003832 (doi:10.1371/journal.pone.0003832) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 7.Slater M, Perez-Marcos D, Ehrsson HH, Sanchez-Vives MV. 2008. Towards a digital body: the virtual arm illusion. Front. Hum. Neurosci. 2, 6. 10.3389/neuro.01.017.2008 (doi:10.3389/neuro.01.017.2008) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 8.Slater M, Perez-Marcos D, Ehrsson HH, Sanchez-Vives MV. 2009. Inducing illusory ownership of a virtual body. Front. Neurosci. 3, 214–220 10.3389/neuro.01.029.2009 (doi:10.3389/neuro.01.029.2009) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Slater M, Spanlang B, Sanchez-Vives M, Blanke O. 2010. First person experience of body transfer in virtual reality. PLoS ONE 5, e10564. 10.1371/journal.pone.0010564 (doi:10.1371/journal.pone.0010564) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 10.Kilteni K, Normand J-M, Sanchez-Vives MV, Slater M. 2012. Extending body space in immersive virtual reality: a very long arm illusion. PLoS ONE 7, e40867. 10.1371/journal.pone.0040867 (doi:10.1371/journal.pone.0040867) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 11.Normand JM, Giannopoulos E, Spanlang B, Slater M. 2011. Multisensory stimulation can induce an illusion of larger belly size in immersive virtual reality. PLoS ONE 6, e16128. 10.1371/journal.pone.0016128 (doi:10.1371/journal.pone.0016128) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 12.Maselli A, Slater M. 2013. The building blocks of the full body ownership illusion. Front. Hum. Neurosci. 7, 83. 10.3389/fnhum.2013.00083 (doi:10.3389/fnhum.2013.00083) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 13.Sanchez-Vives MV, Spanlang B, Frisoli A, Bergamasco M, Slater M. 2010. Virtual hand illusion induced by visuomotor correlations. PLoS ONE 5, e10381. 10.1371/journal.pone.0010381 (doi:10.1371/journal.pone.0010381) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 14.Kalckert A, Ehrsson HH. 2012. Moving a rubber hand that feels like your own: a dissociation of ownership and agency. Front. Hum. Neurosci. 6, 40. 10.3389/fnhum.2012.00040 (doi:10.3389/fnhum.2012.00040) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 15.Petkova VI, Khoshnevis M, Ehrsson HH. 2011. The perspective matters! Multisensory integration in ego-centric reference frames determines full-body ownership. Front. Psychol. 2, 35. 10.3389/fpsyg.2011.00035 (doi:10.3389/fpsyg.2011.00035) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Armel KC, Ramachandran VS. 2003. Projecting sensations to external objects: evidence from skin conductance response. Proc. R. Soc. Lond. B 270, 1499–506 10.1098/rspb.2003.2364 (doi:10.1098/rspb.2003.2364) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 17.Moseley G, Olthof N, Venema A, Don S, Wijers M, Gallace A, Spence C. 2008. Psychologically induced cooling of a specific body part caused by the illusory ownership of an artificial counterpart. Proc. Natl Acad. Sci. USA 105, 13169. 10.1073/pnas.0803768105 (doi:10.1073/pnas.0803768105) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 18.Kammers MPM, Rose K, Haggard P. 2011. Feeling numb: temperature, but not thermal pain, modulates feeling of body ownership. Neuropsychologia 49, 1316–1321 [DOI] [PubMed] [Google Scholar]
- 19.Aspell J, Lenggenhager B, Blanke O. 2009. Keeping in touch with one's self: multisensory mechanisms of self-consciousness. PLoS ONE 4, e6488. 10.1371/journal.pone.0006488 (doi:10.1371/journal.pone.0006488) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 20.Moseley GL, Gallace A, Spence C. 2012. Bodily illusions in health and disease: physiological and clinical perspectives and the concept of a cortical ‘body matrix’. Neurosci. Biobehav. Rev. 36, 34–46 10.1016/j.neubiorev.2011.03.013 (doi:10.1016/j.neubiorev.2011.03.013) [DOI] [PubMed] [Google Scholar]
- 21.Dyck P, O'Brien P, Kosanke J, Gillen D, Karnes J. 1993. A 4, 2, and 1 stepping algorithm for quick and accurate estimation of cutaneous sensation threshold. Neurology 43, 1508–1512 10.1212/WNL.43.8.1508 (doi:10.1212/WNL.43.8.1508) [DOI] [PubMed] [Google Scholar]
- 22.Kaplan D. 2009. Structural equation modeling: foundations and extensions. Thousand Oaks, CA: Sage Publications [Google Scholar]
- 23.Tsakiris M, Tajadura-Jimenez AT, Costantini M. 2011. Just a heartbeat away from one's body: interoceptive sensitivity predicts malleability of body-representations. Proc. R. Soc. B 278, 2470–2476 10.1098/rspb.2010.2547 (doi:10.1098/rspb.2010.2547) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 24.de la Pena N, Weil P, Llobera J, Giannopoulos E, Pomés A, Spanlang B, Friedman D, Sanchez-Vives MV, Slater M. 2010. Immersive journalism: immersive virtual reality for the first person experience of news. PRESENCE: Teleoperators Virtual Environ. 19, 291–301 10.1162/PRES_a_00005 (doi:10.1162/PRES_a_00005) [DOI] [Google Scholar]
- 25.Mirams L, Poliakoff E, Brown RJ, Lloyd DM. 2011. Interoceptive and exteroceptive attention have opposite effects on subsequent somatosensory perceptual decision making. Q. J. Exp. Psychol. 65, 926–938 10.1080/17470218.2011.636823 (doi:10.1080/17470218.2011.636823) [DOI] [PubMed] [Google Scholar]
- 26.Hilz M, Stemper B, Axelrod F, Kolodny E, Neundörfer B. 1999. Quantitative thermal perception testing in adults. J. Clin. Neurophysiol. 16, 462. 10.1097/00004691-199909000-00008 (doi:10.1097/00004691-199909000-00008) [DOI] [PubMed] [Google Scholar]
- 27.Toibana N, Sakakibara H, Hirata M, Kondo T, Toyoshima H. 2000. Thermal perception threshold testing for the evaluation of small sensory nerve fiber injury in patients with hand–arm vibration syndrome. Ind. Health 38, 366–371 10.2486/indhealth.38.366 (doi:10.2486/indhealth.38.366) [DOI] [PubMed] [Google Scholar]
- 28.Folegatti A, De Vignemont F, Pavani F, Rossetti Y, Farnè A. 2009. Losing one's hand: visual-proprioceptive conflict affects touch perception. PLoS ONE 4, e6920. 10.1371/journal.pone.0006920 (doi:10.1371/journal.pone.0006920) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 29.Guterstam A, Henrik Ehrsson H. 2012. Disowning one's seen real body during an out-of-body illusion. Conscious. Cogn. 21, 1037–1043 10.1016/j.concog.2012.01.018 (doi:10.1016/j.concog.2012.01.018) [DOI] [PubMed] [Google Scholar]
- 30.Petkova VI, Björnsdotter M, Gentile G, Jonsson T, Li T-Q, Ehrsson HH. 2011. From part- to whole-body ownership in the multisensory brain. Curr. Biol. 21, 1118–1122 10.1016/j.cub.2011.05.022 (doi:10.1016/j.cub.2011.05.022) [DOI] [PubMed] [Google Scholar]
- 31.Tsakiris M, Haggard P. 2005. The rubber hand illusion revisited: visuotactile integration and self-attribution. J. Exp. Psychol. Hum. Percept. Perform. 31, 80–91 10.1037/0096-1523.31.1.80 (doi:10.1037/0096-1523.31.1.80) [DOI] [PubMed] [Google Scholar]
- 32.Kilteni K, Bergstrom I, Slater M. 2013. Drumming in immersive virtual reality: the body shapes the way we play. IEEE Trans. Vis. Comput. Graph. 19, 597–605 10.1109/TVCG.2013.29 (doi:10.1109/TVCG.2013.29) [DOI] [PubMed] [Google Scholar]
- 33.Hohwy J, Paton B. 2010. Explaining away the body: experiences of supernaturally caused touch and touch on non-hand objects within the rubber hand illusion. PLoS ONE 5, e9416. 10.1371/journal.pone.0009416 (doi:10.1371/journal.pone.0009416) [DOI] [PMC free article] [PubMed] [Google Scholar]