

Abstract
This study investigated the relationship of required coefficient of friction to gait speed, obstacle height, and turning strategy as participants walked around obstacles of various heights. Ten healthy, young adults performed 90° turns around corner pylons of four different heights at their self selected normal, slow, and fast walking speeds using both step and spin turning strategies. Kinetic data was captured using force plates. Results showed peak required coefficient of friction (RCOF) at push off increased with increased speed (slow µ= 0.38, normal µ=0.45, fast µ=0.54). Obstacle height had no effect on RCOF values. The average peak RCOF for fast turning exceeded the OSHA safety guideline for static COF of µ>0.50, suggesting further research is needed into the minimum static COF to prevent slips and falls, especially around corners.
Keywords: slips and falls, friction, required coefficient of friction, RCOF, friction demand, gait, turning, speed, biomechanics
Introduction
Falls are a leading cause of injury at both home and the work place. Slips are the second leading cause of falls, accounting for 25% of all fall injuries (Yeoh et al., 2013; Yoon and Lockhart, 2006). The high incidence rate of slips and falls has inspired numerous studies into slip mechanisms and safety guidelines, particularly in the workplace. When considering slips, the available coefficient of friction (ACOF) must be greater than the required coefficient of friction (RCOF) of an individual's gait to prevent a slip. These measures are defined by the ratio between the horizontal ground reaction force (Fh) and vertical ground reaction force (Fz) (Redfern and Andres, 1984). When the RCOF at heel contact exceeds the ACOF, the number of slips and falls during straight gait has been shown to increase and continue increasing as the discrepancy grows (Chang et al., 2013; Hanson et al., 1999). The RCOF is therefore a useful tool in assessing slip potential if the ACOF is known (Nagano et al., 2013).
While many RCOF values have been reported for straight walking, stair climbing, ramp ascent and descent, and for a variety of surfaces, few RCOF values have been reported for turning. Daily activities, architectural constraints, and random obstacles require directional changes as well as straight forward walking during every-day movements (Glaister et al., 2007). These daily directional turns are distinctly different from straight forward walking with regards to the ground reaction forces and biomechanical parameters (Taylor et al., 2005). It is questionable, then, how closely the RCOF during turning will mimic the RCOF during normal walking.
It has recently been shown that peak RCOF during turning occurs at the push-off phase of the gait cycle (Yamaguchi et al., 2012). This contrasts previously reported RCOF values for straight walking which identify peak RCOF forces at the heel contact phase of gait (Cham and Redfern, 2002; Hanson et al., 1999; Kim et al, 2005; Redfern et al., 2001). Additionally, the peak RCOF values reported for 60° turns (µ= 0.34) (Yamaguchi et al, 2012) and 90° turns (µ= 0.36) (Burnfield et al., 2005) exceed traditional values for straight walking in similar participants ( ) (Cham and Redfern., 2002; Hanson et al., 1999; Kim et al., 2005; Redfern et al., 2001). Combined with the knowledge that RCOF increases with increased gait speeds (Kim et al., 2005; Powers et al., 2002), the frictional demand during turning, especially at high speeds, may exceed the ACOF in many settings.
Individuals must radically alter their whole body center-of-mass (COM) trajectory in order to change directions. While Pai and Patton (1997) and Lockhart et al. (2003) reported significant correlation between the COM velocity and the RCOF and the outcome of slips, the analysis was confined to normal walking where the COM velocity was a linear trace. Yamaguchi et al. (2012) found the COM – center of pressure (COP) angle also predicts the RCOF during turning. However, no study has investigated the RCOF during turning when the COM was restricted. Such turning events occur countless times per day as individuals navigate around variously sized obstacles. Taller obstacles, by restricting the available space, may restrict the COM trajectory around the turn. Conversely, shorter obstacles enable the individual to lean over the object and allow the COM to cut the corner, thereby increasing the COM-COP angle and possibly increasing the required friction.
The aims of this study were to further investigate the frictional demands of turning at different speeds and around obstacles of various heights. Based on the literature, we hypothesized that increased speeds and lower obstacles would lead to higher peak RCOF values.
Methods
Participants
Ten healthy adults (7 male, 3 female) 18-45 years of age (mean ± std dev = 25.3 ± 3.74 years), were recruited from Virginia Tech and the surrounding community. Participants were informed of the protocol by signing an informed consent form prior to the experiment. Participants were also given a questionnaire about their eligibility and their height, weight, athletic activity, and hand and foot dominance. Exclusion criteria consisted of any history of balance disorders, dizziness, musculoskeletal injury the past year affecting normal gait, any neurological disorders, one or more concussions within the past year, and / or significant visual impairment. The protocol was approved by the Institutional Review Board at Virginia Tech.
Experimental Procedure
The participants walked along a 7.8 m long, 1.2 m wide vinyl covered walkway with an adjoining 2.5 m by 1.3 m section attached approximately halfway down the walkway. An overhead view of the set-up is shown in Figure 1. A smaller path, 0.75 m wide, was marked on the walkway and adjoining section for the participants to follow. The path consisted of a 3.5 m straight section on the walkway followed by a 90° left turn into a 2.5 m section on the adjoining section. The obstacle, a 10 cm diameter cylinder, was placed on the inside corner of the 90° turn. Micropore paper tape (3M, St. Paul, MN 55144-1000, USA) was applied around the corner to increase the ACOF to µ>0.90. This was done to prevent any slips or gait adjustments in anticipation of slipping while walking around the corner, particularly at fast speeds. Through pilot testing, the tape was shown to adequately protect against slips and enable unaltered gait through the turn, especially at fast speeds.
Figure 1.
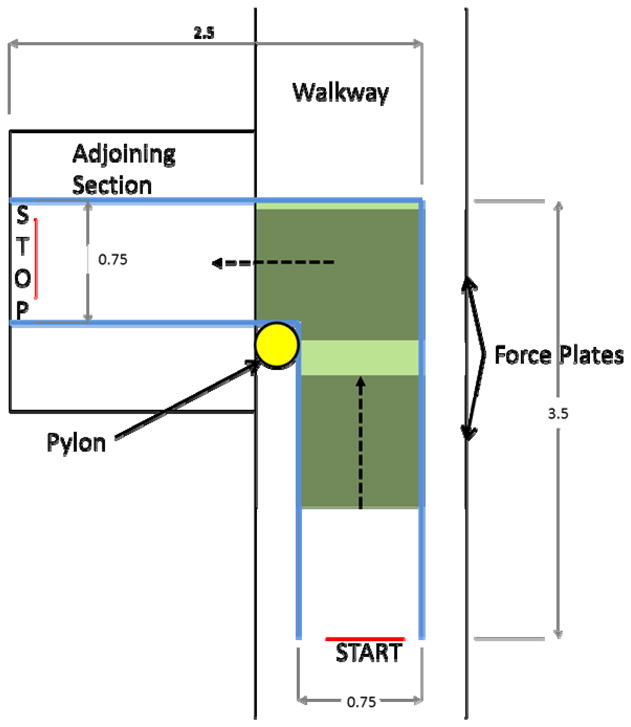
A top-down view of the walkway and adjoining section with marked start and stop lines, path, and corner pylon. All dimensions given are in meters. The gray shaded areas indicate the locations of the force plates. The green shaded area indicates the area covered in Micropore tape.
Four different heights for the corner pylon were used, 0 cm (no corner pylon), 63 cm, 104 cm, and 167 cm. The three different obstacle heights (63 cm, 104 cm, and 167 cm) were chosen for two primary reasons: 1.) to correspond to the height of the knee, hip, and shoulder joints, respectively, and 2.) to mimic the height of everyday objects such as crates (knee), desks and counters (hip), and shelves and cabinets (shoulder).
Three-dimensional kinematics were measured using a six-camera Pro-Reflex motion analysis system (Qualysis Medical AB, Gothenburg, Sweden) and 35 infrared-reflective markers placed bilaterally over the first, second, and fifth metatarsal heads, medial and lateral malleolus, calcaneus, medial and lateral femoral condyle, anterior superior iliac spine, trochanter, iliac crest, clavicle, acromioclavicular (AC) joint, lateral humeral condyle, ulnar stylus, third metacarpal head, ear, and top of head. A marker was also placed on top of the corner pylon. Two force plates (AMTI # BP6001200100, AMTI Force and Motion, Watertown, MA 02472, USA) (Bertec #K80102, Type 45550-08, Bertec Corporation, OH 43212, USA) were embedded into the walkway just before and after the corner pylon. The motion tracking and force plates were sampled at 100 Hz.
Participants were given a warm-up period to accustom themselves to walking at each of the three self-selected speeds: normal (NW), slow (SW), and fast (FW). For slow walking, participants were instructed to walk “at a pace slower than your normal walking speed.” For fast walking, participants were instructed to walk “as fast as possible without running or jogging.” Participants were then introduced to the corner obstacle and turning task. Participants were made aware of the tape and ensured that there was no slipping hazard around the corner even when they walked at fast speeds. The participant was then instructed to walk at one of the three speeds and make a 90 degree turn at the corner without making contact with the object and to continue walking until they reached the stop line at the end of the outlined path. Several warm-up trials were used to familiarize the subject to the task and to adjust the subject's starting point such that their stance limb landed on the force plate. The procedure consisted of 3 straight gait trials followed by 24 turning trials, 6 turns at each of the four heights, for each speed. The six turns at each height were evenly divided between step turns and spin turns accomplished by altering the starting limb of the subject, such that 3 trials were obtained for each condition.
A spin turn was identified as a turn in which the left foot landed on the corner force plate. Conversely, a step turn was a turn in which the right turn landed on the force plate. This was consistent with the method used by Taylor et al. (2005) whereby a spin turn is identified as a turn toward the same side as the stance limb, not necessarily requiring a spin or pivot, and a step turn is a turn away from the stance limb, as shown in Figure 2. Whereas Taylor et al. (2005) further subdivided spin turns based on the presence of a pivot, our analysis was limited to spin turns as a whole, consistent with Akram et al. (2010), Hase and Stein (1999), and Yamaguchi et al. (2012).
Figure 2.
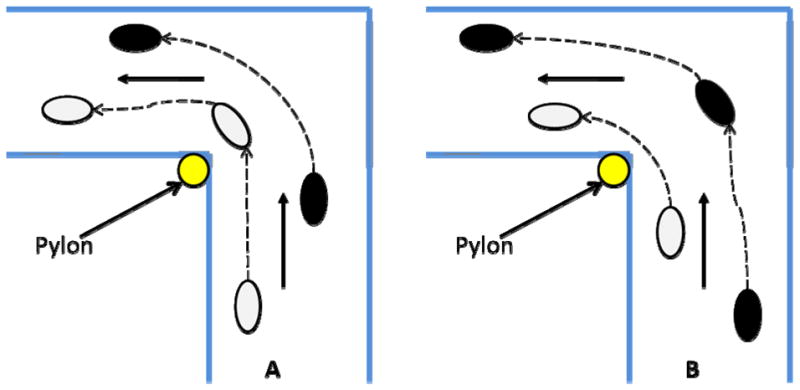
Representative foot placement for spin (A) and step (B) turns. The grey foot indicates the left foot. The black foot indicates the right foot. (A) For a spin turn to the left, the left foot lands on the force plate. The left leg here is the stance limb throughout the turn. (B) For a step turn to the left, the right foot lands on the force plate. The right leg is the stance limb throughout the turn.
To eliminate any order effect, the obstacle heights, 0 cm- 63 cm- 104 cm- 167 cm, were rotated up for each new speed. Furthermore, the order of speeds, NW – SW – FW, was rotated for each subject such that Subject 1 began with NW at 0 cm and Subject 2 began with SW at 167 cm. A graphical depiction of the protocol is shown in Figure 3. Each subject performed 72 turning trials and 9 straight walking trials.
Figure 3.
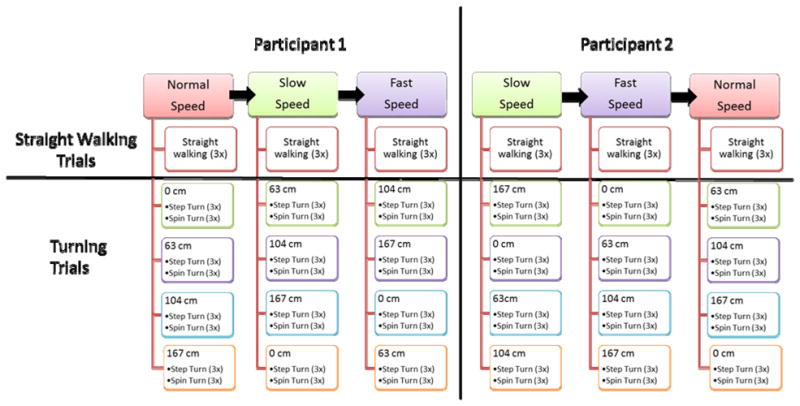
A graphical depiction of the protocol for Participants 1 and 2. All trials at one speed were completed before moving to the next speed. The obstacle heights were tested in order from top to bottom for each speed. Three step turns and three spin turns were performed for each obstacle height + speed combination. The order of the step turns and spin turns were random, but all three step turn trials were completed before switching to spin turns or vice versa. A total of 72 turning trials and 9 walking trials were recorded for each participant.
Data Analysis
Data from all ten participants were analyzed. The 3-dimensional marker data and the force plate data were filtered using a 5 Hz low-pass Butterworth filter. The ground reactive forces (GRF) were recorded by the force plate and used to calculate the RCOF:
| (1) |
where Fvertical is the vertical force FZ and Fhorizontal is the resultant sum of Fx and Fy,
| (2) |
Maximum RCOF values were extracted from the stance phase of the turn. Immediately following heel contact and preceding toe-off, large RCOF values have previously been reported but do not result in macroscopic slips (Redfern et al., 2001). The large RCOF values correspond to extremely small vertical GRF, which inflates the RCOF. In reality, the body weight is supported by the other limb during this phase, with only a very small percentage of the person's body weight supported by the limb with large RCOF values. Thus, a slip when there is negligible vertical GRF will not result in a noticeable movement of the COM. To prevent these values from distorting the high RCOF required to prevent macroscopic slips, only RCOF values where the vertical force was greater than 50 N were compared (Yamaguchi et al., 2012). Trials in which the subject stepped multiple times on the force plate or only partially stepped on the force plate were also excluded from the RCOF analysis. A total of 291 of the 720 trials were excluded for this reason (148 slow trials, 84 normal, and 59 fast).
The ACOF of the tape-covered force plate was measured five times using a 2.27 kg weighted athletic shoe in a method consistent with ASTM F609-05, Standard Test Method for Using a Horizontal Pull Slipmeter (HPS) and similar to the method used by Hanson et al. (1999). The shoe was uniformly weighted and set upon the force plate. A horizontal force was then applied to the shoe via a string until the shoe moved or slipped. The peak ACOF was calculated using the above equations and the GRF measured by the force plate immediately preceding the shoe slip. The ACOF for the taped force plate was µ= 0.976 ± 0.043. Stance time was defined as the time from heel contact to push-off during the directional change.
Approach Speed
The approach speed was defined as the speed of the subject prior to decelerating for the turn. It was calculated using the average velocity of the right and left AC joint markers in the x-direction (sagittal plane) over 300 ms starting when the subject entered the 3D motion cameras' views (nominally 2.5 m prior to the corner pylon).
Statistical Analysis
Univariate statistics of RCOF were calculated at each speed, height, and turning strategy. To determine the relationship between RCOF and speed, height, and turning strategy, we fit repeated measures models that account for the within subject correlation among each subject's trials. Using the Akaike information criterion, we selected the compound symmetry covariance structure as the most appropriate structure for our data. Trial and interaction effects were also examined using the type 3 test for fixed effects. A 0.05 significance level was used throughout this analysis. All analysis was performed in SAS 9.3 (SAS Institute Inc., Cary, NC, USA).
Results
Descriptive Results
Univariate statistics are summarized in Table 1. The average height and weight of the participants was 1.78 ± 0 .11 meters tall (mean ± std dev) and 79.97 ± 12.39 kg, respectively. Mean approach speeds were 0.91 ± 0.40 m/s, 1.39 ± 0.25 m/s, and 1.97 ± 0.27 m/s for the self-selected slow, normal, and fast walking speeds. The average RCOF at slow, normal, and fast speeds was 0.38 ± 0.10, 0.45 ± 0.11, and 0.54 ± 0.10, respectively. The maximum RCOF occurred at push-off for 94.7% of all trials. Under normal walking speed with no obstacle, the RCOF at heel contact were µ=0.21, µ=0.25, and µ=0.35 for slow, normal, and fast speeds, as shown in the mean and standard deviation curves in Figure 4.
Table 1.
Results from the univariate descriptive statistics: Peak RCOF by speed, height, and turning strategy.
| Number of Trials* | Mean | St Dev | |
|---|---|---|---|
| Speed (self-selected) | |||
| Slow | 92 | 0.38 | 0.10 |
| Normal | 156 | 0.45 | 0.11 |
| Fast | 181 | 0.54 | 0.10 |
| Height (cm) | |||
| 0 | 129 | 0.48 | 0.13 |
| 63 | 111 | 0.47 | 0.11 |
| 104 | 105 | 0.47 | 0.12 |
| 167 | 84 | 0.48 | 0.12 |
| Turning Strategy | |||
| Step | 205 | 0.48 | 0.11 |
| Spin | 224 | 0.47 | 0.13 |
Number of trials analyzed after excluding trials with improper foot placement or multiple steps on the force plate
Figure 4.

Mean and standard deviation curves of the RCOF for slow (n=92), normal (n=156) and fast (n=181) walking speeds with no obstacle present (Height = 0 cm).
Regression Model Results
Results from the regression model are depicted in Table 2. Using repeated measures analysis, RCOF at self-selected slow (β=-0.07, p<0.0001) and fast speeds (β=0.09, p<0.0001) were significantly different compared to normal. After adjusting for height and speed, turning strategy did not significantly affect RCOF (β=-0.002, p=0.83). Obstacle height did not have a significant effect on RCOF (p=0.6479) There were no significant interactions between speed, obstacle height, and turning strategy (p=0.0750, p=0.8909, p=0.1490) and no significant trial effects (p=0.7067). Measured approach speeds for slow, normal, and fast speeds were significantly different from one another (p<0.0001).
Table 2.
Results from regression analysis: Peak RCOF by speed, height, and turning strategy.
| β (SE) | P Value | |
|---|---|---|
| Speed (self-selected) | ||
| Slow | -0.07 (0.1) | <0.0001* |
| Normal | - | - |
| Fast | 0.09 (0.01) | <0.0001* |
| Height (cm) | ||
| 0 | - | - |
| 63 | -0.01 (0.01) | 0.64 |
| 104 | -0.01 (0.01) | 0.27 |
| 167 | -0.02 (0.01) | 0.29 |
| Turning Strategy | ||
| Step | - | - |
| Spin | -0.002 (0.01) | 0.83 |
Significantly different than normal speed
Discussion
The RCOF of the shoe-floor interface is critical in assessing the slip and fall risk of the environment. It has been well documented that during normal walking an increased RCOF is associated with an increased number of slips and falls (Chang et al., 2013; Hanson et al., 1999; Lockhart., 2012; Nagano et al., 2013; Troy et al., 2008; Wu et al., 2012). The results presented here show that the RCOF at push-off increases during turning as speed increases. This agrees with the straight walking results of Kim et al. (2005) and Powers et al. (2002) who showed increased heel contact RCOF demands with increased speeds. The reported self-selected speeds for slow, normal and fast speeds are significantly distinct and consistent with those reported by Himann et al. (1988) for the same age group. Interestingly, we found no effect of obstacle height on the RCOF. While our hypothesis expected taller obstacles to influence the COM trajectory and affect RCOF, there was no evidence of this in the RCOF values. It is possible that by the push-off phase of gait, the COM has already maneuvered the obstacle. Examining this association at different instances during the stance phase may yield different results. The novel aspect of these findings, however, is the high values of RCOF, especially at high speeds, while turning.
Frictional demand is higher during turning than normal walking, as previously reported by Yamaguchi et al. (2012), Chiou et al. (2003), and Burnfield et al. (2005), but no study reported mean peak RCOF values greater than µ=0.36. In comparison, our study reported a mean peak RCOF of µ=0.45 for normal speed turning, a significant increase from previously reported values. Whereas Yamaguchi et al. (2012) and the present study both examined RCOF at the push-off phase of gait, Burnfield et al. (2005) and Chiou et al. (2003) only examined the heel contact phase of the gait cycle. Similar to Yamaguchi et al. (2012), we found no significant RCOF differences between step and spin turns. The increased frictional demands here can likely be attributed to the use of a 90° turn, rather than the 60° turn used by Yamaguchi et al. (2012). Interestingly, we found very similar RCOF values at heel contact for normal speeds with no obstacle (µ=0.25) to those reported by Yamaguchi et al. (2012) (µ=0.25, µ=0.26) but lower RCOF values than those reported by Chiou et al. (2003) (µ.30) and Burnfield et al. (2005) for young populations (µ=0.36).
An additional source of variation may be the ACOF of the surfaces. The walkway in this study was covered with a micropore tape to increase the ACOF to µ> 0.90 when measured with a standard athletic shoe. Participants were also notified of the tape and informed that it increased friction to prevent slipping prior to trials. Conversely, Yamaguchi et al. (2012) did not report ACOF values. It is therefore possible that the perception of slipperiness, or non-slipperiness in this case, resulted in gait adaptation which increased the RCOF demand relative to other studies (Cham and Redfern, 2002).
Our peak RCOF for turning exceeds the previously reported peak RCOF for descending ramps, walking straight, and descending stairs (Burnfield et al., 2005; Cham and Redfern., 2002; Hanson et al., 1999; Redfern et al, 2001). However, previous studies reported peak RCOF at heel contact, not push-off. During straight walking, slips during the heel contact phase have a higher fall risk as the COM transitions over the slipping limb compared to slips during push off, where the COM is transitioning away from the slipping limb (Lockhart, 2012). However, the COM trajectory is significantly different during turning. The COM must undergo significant transverse accelerations throughout the turn, and at times travels outside the base of support (BOS), as shown in Figure 5 (Taylor et al., 2005). During spin turns in particular, the COM remains outside the BOS for nearly the entire stance phase, only returning within the BOS at push-off (Taylor et al., 2005). A slip during this push-off phase may leave the COM remaining outside the BOS in an unstable and fall prone position. Furthermore, the subsequent placement of the slipping leg may be affected such that the individual is at an increased risk of falling during their next step (Troy et al., 2008).
Figure 5.
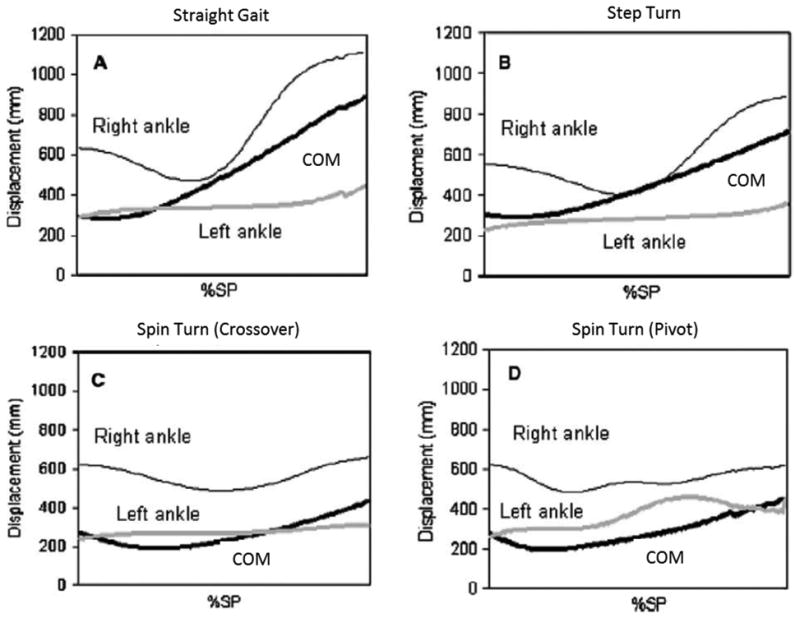
Adapted from (Taylor et al., 2005). The COM in relation to the BOS defined by the left and right ankles. During straight gait, the COM is outside the BOS during heel contact. During spin turns, especially those involving pivots, the COM is outside the BOS for nearly the entire stance phase, returning only during push-off. The present figure subdivides spin turns into two categories: those where the stance limb pivots on the ground (pivot) and those where the swing limb crosses over the stance limb without the stance limb pivoting (crossover). Our analysis did not perform this sub-categorization of spin turns.
It is unclear whether there is an increased risk of falling during a push-off slip while turning compared to straight walking. Slips have been reported during both heel contact and push-off phases of turning (Nagano et al., 2013), though it is unclear how many resulted in falls. While our results indicate an extremely high risk for slips during high speed turning, whether these slips result in falls or not is unknown.
The high frictional demands reported here present concerns regarding current recommendations for minimum static coefficient of friction. The Occupational Safety and Health Administration (OSHA) maintains a recommended minimum static COF of µ ≥ 0.50 for walking surfaces. The American with Disabilities Act (ADA) recommends static COF of µ ≥ 0.60 for accessible routes and µ ≥ 0.80 for ramps. We reported an average peak RCOF of µ = 0.54 at fast turning speeds and µ = 0.45 at normal turning speeds. Based on these results, the OSHA minimum static COF recommendation of µ ≥ 0.50 is inadequate at preventing slips around corners and areas where turns are common. Regardless of the propensity to fall from a slip during push-off compared to heel contact, the large RCOF values presented here suggest that the minimum static COF recommendations should be reexamined to accommodate turning. Due to the relative lack of knowledge regarding slips and falls while turning, we also encourage future studies into the outcome of slips while turning.
Two limitations need to be addressed in this study. First, the sample size was limited to only 10 people. A larger sample size will necessarily result in more accurate peak RCOF value. Second, we did not provide uniform shoes for the participants. Participants were instead instructed to wear athletic shoes. While this resulted in large variations in our data, it more accurately simulated the variation of the population and shoe-to-floor interface when turning. Allowing participants to wear their normal shoes also enabled us to capture their standard gait characteristics while turing without worrying about any alteration to their gait by the provided shoes (Chiou et al., 2003).
Acknowledgments
This research was supported by the NSF-Information and Intelligent Systems (IIS) and Smart Health and Wellbeing -1065442 and 1065262. NIOSH (grant #CDC/NIOSHR01-OH009222). We would like to thank Nora Fitzgerald for help with the statistical analysis. We also want to thank Rahul Soangra and Chris Frames for the excellent advice throughout the data collection and analysis. Special thanks goes to Sam Worley and Neal Moriconi for their help during data collection and processing.
Footnotes
Conflict of Interest: The authors affirm there are no conflicts of interest.
Publisher's Disclaimer: This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final citable form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
Contributor Information
Peter Fino, Department of Mechanical Engineering, Virginia Polytechnic Institute and State University.
Thurmon Lockhart, Grado Department of Industrial and Systems Engineering, Virginia Polytechnic Institute and State University.
References
- Akram SB, Frank JS, Chenouri S. Turning behavior in healthy older adults: Is there a preference for step versus spin turns? Gait Posture. 2010;31:23–26. doi: 10.1016/j.gaitpost.2009.08.238. [DOI] [PubMed] [Google Scholar]
- Burnfield JM, Tsai YJ, Powers CM. Comparison of utilized coefficient of friction during different walking tasks in persons with and without a disability. Gait Posture. 2005;22:82–88. doi: 10.1016/j.gaitpost.2004.07.004. [DOI] [PubMed] [Google Scholar]
- Cham R, Redfern MS. Changes in gait when anticipating slippery floors. Gait Posture. 2002;15:159–171. doi: 10.1016/s0966-6362(01)00150-3. [DOI] [PubMed] [Google Scholar]
- Chang WR, Matz S, Chang CC. The available coefficient of friction associated with different slip probabilities for level straight walking. Safety Science. 2013;58:49–52. [Google Scholar]
- Chiou SS, Bhattacharya A, Lai CF, Succop PA. Effects of environmental and job-task factors on workers' gait characteristics on slippery surfaces. Occupational Ergonomics. 2003;3:209–223. [Google Scholar]
- Glaister BC, Bernatz GC, Klute GK, Orendurff MS. Video task analysis of turning during activities of daily living. Gait Posture. 2007;25:289–294. doi: 10.1016/j.gaitpost.2006.04.003. [DOI] [PubMed] [Google Scholar]
- Hanson JP, Redfern MS, Mazumdar M. Predicting slips and falls considering required and available friction. Ergonomics. 1999;42:1619–1633. doi: 10.1080/001401399184712. [DOI] [PubMed] [Google Scholar]
- Hase K, Stein R. Turning strategies during human walking. Journal of Neurophysiology. 1999;81:2914–2922. doi: 10.1152/jn.1999.81.6.2914. [DOI] [PubMed] [Google Scholar]
- Himann JE, Cunningham DA, Rechnitzer PA, Paterson DH. Age-related changes in speed of walking. Medicine and science in sports and exercise. 1988;20:161–166. doi: 10.1249/00005768-198820020-00010. [DOI] [PubMed] [Google Scholar]
- Kim S, Lockhart T, Yoon HY. Relationship between age-related gait adaptations and required coefficient of friction. Safety science. 2005;43:425–436. doi: 10.1016/j.ssci.2005.08.004. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Lockhart TE. Biomechanics of slips and falls in the elderly 2012 [Google Scholar]
- Lockhart TE, Woldstad JC, Smith JL. Effects of age-related gait changes on the biomechanics of slips and falls. Ergonomics. 2003;46:1136–1160. doi: 10.1080/0014013031000139491. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Nagano H, Sparrow W, Begg RK. Biomechanical characteristics of slipping during unconstrained walking, turning, gait initiation and termination. Ergonomics. 2013:1–11. doi: 10.1080/00140139.2013.787122. [DOI] [PubMed] [Google Scholar]
- Pai YC, Patton J. Center of mass velocity-position predictions for balance control. Journal of Biomechanics. 1997;30:347–354. doi: 10.1016/s0021-9290(96)00165-0. [DOI] [PubMed] [Google Scholar]
- Powers CM, Burnfield JM, Lim P, Brault JM, Flynn JE. Utilized coefficient of friction during walking: static estimates exceed measured values. Journal of forensic sciences. 2002;47:1303–1308. [PubMed] [Google Scholar]
- Redfern M, Andres R. Year The analysis of dynamic pushing and pulling; required coefficients of friction. Proceedings of the 1984 international conference on occupational ergonomics [Google Scholar]
- Redfern MS, Cham R, Gielo-Perczak K, Grönqvist R, Hirvonen M, Lanshammar H, Marpet M, Pai CYC, IV, Powers C. Biomechanics of slips. Ergonomics. 2001;44:1138–1166. doi: 10.1080/00140130110085547. [DOI] [PubMed] [Google Scholar]
- Taylor M, Dabnichki P, Strike S. A three-dimensional biomechanical comparison between turning strategies during the stance phase of walking. Human movement science. 2005;24:558–573. doi: 10.1016/j.humov.2005.07.005. [DOI] [PubMed] [Google Scholar]
- Troy KL, Donovan SJ, Marone JR, Bareither ML, Grabiner MD. Modifiable performance domain risk-factors associated with slip-related falls. Gait Posture. 2008;28:461–465. doi: 10.1016/j.gaitpost.2008.02.008. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Wu X, Lockhart TE, Yeoh HT. Effects of obesity on slip-induced fall risks among young male adults. Journal of Biomechanics. 2012;45:1042–1047. doi: 10.1016/j.jbiomech.2011.12.021. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Yamaguchi T, Yano M, Onodera H, Hokkirigawa K. Kinematics of center of mass and center of pressure predict friction requirement at shoe-floor interface during walking. Gait Posture. 2012 doi: 10.1016/j.gaitpost.2012.11.007. [DOI] [PubMed] [Google Scholar]
- Yeoh HT, Lockhart TE, Wu X. Non-fatal occupational falls on the same level. Ergonomics. 2013;56:153–165. doi: 10.1080/00140139.2012.746739. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Yoon HY, Lockhart TE. Nonfatal occupational injuries associated with slips and falls in the United States. International journal of industrial ergonomics. 2006;36:83–92. doi: 10.1016/j.ergon.2005.08.005. [DOI] [PMC free article] [PubMed] [Google Scholar]