

Abstract
The objective of this study was to assess the effects of augmented reality (AR) cues designed to assist middle-aged and older drivers with a range of UFOV impairments, judging when to make left-turns across oncoming traffic. Previous studies have shown that AR cues can help middle-aged and older drivers respond to potential roadside hazards by increasing hazard detection without interfering with other driving tasks. Intersections pose a critical challenge for cognitively impaired drivers, prone to misjudge time-to-contact with oncoming traffic. We investigated whether AR cues improve or interfere with hazard perception in left-turns across oncoming traffic for drivers with age-related cognitive decline. Sixty-four middle-aged and older drivers with a range of UFOV impairment judged when it would be safe to turn left across oncoming traffic approaching the driver from the opposite direction in a rural stop-sign controlled intersection scenario implemented in a static base driving simulator. Outcome measures used to evaluate the effectiveness of AR cueing included: Time-to-Contact (TTC), Gap Time Variation (GTV), Response Rate, and Gap Response Variation (GRV). All drivers estimated TTCs were shorter in cued than in uncued conditions. In addition, drivers responded more often in cued conditions than in uncued conditions and GRV decreased for all drivers in scenarios that contained AR cues. For both TTC and response rate, drivers also appeared to adjust their behavior to be consistent with the cues, especially drivers with the poorest UFOV scores (matching their behavior to be close to middle-aged drivers). Driver ratings indicated that cueing was not considered to be distracting. Further, various conditions of reliability (e.g., 15% miss rate) did not appear to affect performance or driver ratings.
Keywords: Augmented Reality, Left-Turns, Aging, UFOV, Driver Behavior, Displays
1. Introduction
Left-turns across opposing streams of traffic account for nearly one-fifth of all vehicle collisions in the United States (Chan et al., 2005). Rural stop-sign controlled intersections involving left-turns are particularly troublesome, with nearly 700,000 motor vehicle crashes occurring annually (Retting et al., 2003) and 22% involving fatalities (Laberge et al., 2006). Crash and fatality rates are typically reported most frequently for older drivers and increase with age (Sifrit et al., 2010). For example, an evaluation of at-fault crash involvement ratios has shown that drivers age 60–69 demonstrate little difficulty making maneuvers at intersections controlled by stop signs, while at-fault crash rates increase for the 70–79 and quite markedly for 80+ groups (Sifrit et al., 2010).
The overrepresentation of older drivers in at-fault crashes and collision related fatalities may be associated with physical frailty (Oxley et al., 2006) and/or impairments that lead to failure to yield the right of way, unseen objects, and failure to heed stop signs or signals (McGwin and Brown, 1999). Left-turns across opposing streams of traffic, such as those at stop-sign controlled intersections, may be particularly hazardous for older drivers as they have been observed to suffer from age-related perceptual, cognitive, and motor dysfunction (Kausler, 1991). Impairments of divided attention (Dewar, 2002; Hakamies-Blomqvist et al., 2004), visual search (Bao and Boyle, 2008; Ho et al., 2001; Maltz and Shinar, 1999; Romoser and Fisher, 2009), and useful field of view (UFOV) (Ball and Owsley, 1991; Horswill et al., 2008), which relies on speed of processing for visual attention, may especially undermine driver ability to detect oncoming vehicles (Edwards et al., 2005).
One method for evaluating driving performance during left-turns is to measure time-to-collision (TTC). As two vehicles approach one another, TTC is the time that would elapse before a collision might occur if their speed and direction remained unchanged. In most cases, however, particularly in vehicles making left-turns, one or both vehicles will adjust their speed and the TTC is constantly changing. For the turning vehicle, that involves accelerating from creeping speed to turning speed. Additionally, TTC is subject to change as oncoming traffic often approaches at unpredictably varying speeds, frequently over 55 mph (Preston and Storm, 2003). The minimum value of TTC (MTTC), which occurs along such a time window, has been defined by the Society of Automotive Engineers (SAE Recommended Practice J2944) as the “Minimum time interval, usually measured in seconds, required for one vehicle to strike another vehicle or object over some time period on the order of seconds”.
Older drivers generally over-estimate the speed of vehicles traveling at low speeds, while under-estimating the speed of those traveling much faster (Scialfa et al., 1991). Thus, they may accept smaller turning gaps (Staplin, 1995). Maneuvering small gaps can be especially risky because drivers are more subject to undermine safety margin. For example, Caird and Hancock (1994) observed drivers underestimated MTTCs of less than 2 seconds in a simulator study of turning behavior. Such findings illustrate the importance of investigating the frequency of gap acceptance choices (i.e., response rate).
In another related study that tested a measure of TTC, [0]Skaar et al. (2003) observed that older drivers made more conservative gap acceptance decisions that were approximately 0.8 seconds longer than that of younger drivers. Further, this study is notable for their findings related to differences in TTC dependent on velocity category (i.e., lower gap distance judgments for vehicles traveling 30–45 mph versus 46–60 mph, both for young and old drivers). As a result, drivers tend to accept smaller gaps for vehicles approaching at faster velocities (consistent with other findings by Darzentas et al., 1980; Staplin, 1995).
Gender differences may also play a role in driving performance related to left-turns. Male drivers, in particular, have been observed to accept smaller gaps than female drivers (Yan et al., 2007), with females requiring a larger median gap than males irrespective of age (Alexander et al., 2002). Such findings could be the result of differences in skills related to movement such as hand-eye coordination (i.e., perceptual-motor skills). Studies which have assessed perceptual-motor performance and safety concerns have shown that male drivers consistently overestimate their perceptual-motor skills, whereas safety skills are more prominent among female drivers (Lajunen et al., 1998; Lajunen and Summala, 1995).
To properly investigate driver behavior for high risk groups in making left-turns, a sequence of stages must be taken into account. Chan et al. (2005) investigated the time required to make left-turns in drivers using an assistance application that provides decision-making support. They suggest a specific sequence of events transpires in the process of taking a turn in which the person: 1) waits on the traffic ahead of them in the same lane which is passing through the intersection, 2) arrives at the intersection, 3) goes through the mental processes involved in a decision-making window (gap estimation), 4) makes the desired left-turn, and 5) enters the adjacent lane of traffic while oncoming vehicles from the opposite original lane arrive at the intersection. Results of the study indicated that subjects took approximately three seconds to complete the sequence while waiting for gaps. Time increased to approximately four seconds when pedestrians were present. These findings suggest that the turning sequence is subject to mental load (e.g., environmental complexity).
Cantin et al. (2009) also investigated the effects of intersection complexity on mental workload in a study that examined driving performance of young and older drivers. Response times (RTs) increased as the complexity of the driving contexts increased (e.g., intersections, overtaking maneuvers) for both age groups and older drivers were observed to arrive at intersections at slower speeds than young drivers. A slow approach prolongs the overall turning sequence and delays the gap estimation stage. To compensate for such delays and difficulties estimating safe gaps in oncoming traffic in and with variable levels of complexity, older drivers may choose larger gaps or wait for traffic to clear entirely (e.g., Caird and Hancock, 2002; Skaar et al., 2003). In heavy traffic this strategy is less feasible, and older drivers may select shorter gaps because of impatience in waiting (Pollatschek et al., 2002). Because older drivers tend to take more time to turn the steering wheel (Yan et al., 2007), accelerate (Hakamies-Blomqvist et al., 2004), and complete maneuvers (Parsonson et al., 1996), a quick decision may trigger an unsafe turn.
Prolonged acceleration affects stages one, two, four and five of the left-turn event sequence proposed by Chan et al. (2005). Diminished visual capabilities, such as depth and motion perception, affect the decision making process in stage three. With age-related declines, older drivers may experience greater difficulties at non-signalized intersections. In-vehicle driver assistance systems may improve driving safety by facilitating driver reaction to hazards (Kramer et al., 2007; Lee et al., 2002). One strategy for providing timely information on the trajectory of oncoming vehicles is augmented reality (AR), which combines real and artificial cues to improve operator performance (Azuma, 1997; Azuma et al., 2001). AR offers to improve driver performance by superimposing computer generated annotations or cues (Kearney et al., 2007) that highlight important roadway objects, regions, events, and hazards in the world.
While AR cues may be an effective countermeasure to age-related perceptual and/or cognitive decline, challenges exist in terms of their potential to cause distraction and affect driver trust. AR cues have been observed to benefit middle-aged and older drivers by directing their attention to potential hazards (Schall et al., 2013; Rusch et al., 2013) and similar advisories have been shown to improve gap judgments and TTC estimates in scenarios that involve turns across traffic (Gelau et al., 2011). However, AR cues have also been observed to occlude important visual information (Schall et al., 2010). Such distractions may overload the perceptual abilities of a driver, thereby leading to a greater risk of a collision and decrements in user trust (e.g., the driver may begin to ignore the cues). Further, poor system reliability such as high false alarm rates may affect user trust (Bliss, 1997; Sorkin, 1988) and lead to failures in driving performance (Bliss and Acton, 2003; Lees and Lee, 2007; Maltz and Shinar, 2004).
This study examined how AR cues may affect middle-aged and older drivers (with a broad range of UFOV abilities) to judge when it would be safe to make left turns across oncoming traffic at a simulated rural stop-sign controlled intersection. To isolate cueing benefits in early decision-making, we focused on stage three of the turning event (gap estimation) and kept a low mental workload (rural setting with no visual obstruction, low traffic density, and no pedestrians) to control complexity. Results from pilot data suggested that participants considered the simulator environment for the left-turn task to be realistic (e.g., comparisons of the windshield, gas pedal, engine, road, and passing cars were comparable to the real-world) and thus suitable as a testing platform.
We hypothesized that AR cues would increase the precision of driver gap judgment, especially for older drivers with UFOV impairment. We expected TTC to improve for drivers with the poorest UFOV scores indexed by decreases in TTC and gap time variation which would make their performance more comparable to middle-aged drivers. In a similar manner, we anticipated benefits in driver response rates indexed by more go than no go decisions. Consistent with much of the former literature, we expected females to be more conservative (longer TTC and smaller gap time variation measures) than males, regardless of age. A main effect of chronological time (later defined as instance) in a beneficial direction (e.g., more accurate TTC) may suggest a general learning or practice effect, whereas a main effect of instance in a detrimental direction (e.g., less accurate TTC) may suggest a potential fatigue effect. Finally, while driver distraction and trust were not a primary focus, we expected drivers to have positive reviews of the cueing characteristics in these categories (e.g., rating effectiveness, reliability).
2. Methods
2.1 Participants
Sixty-four drivers participated, including 17 middle-aged, 29 older-UFOV unimpaired, and 18 older-UFOV impaired (Table 1). Age groupings were based on comparable studies (e.g., Bao and Boyle, 2009; Nowakowski et al., 2008; Sifrit et al., 2010). The middle-aged group was selected to have a ten year spread from the older group so that differences in driving performance would be more distinct. All drivers had a valid US driver's license and reported no medical conditions on a standard telephone screen (e.g., neurodegenerative disease, anxiety, and depression) conducted by the researchers. The middle-aged, older-UFOV unimpaired, and older-UFOV impaired drivers had an average of 31, 55, and 60 years of driving experience, respectively (Table 1). All drivers had normal or corrected to normal vision (determined through near and far visual acuity and contrast sensitivity tests). Participants were compensated for their participation.
Table 1.
Driving Experience, Miles Per Week Traveled, and Mean and Standard Deviation for UFOV subtests.
| Middle-Aged (n = 17) | Older UFOV Unimpaired (n = 29) | Older UFOV Impaired (n = 18) | |
|---|---|---|---|
| Age (years) | |||
| Range | 35–54 | 65–82 | 65–89 |
| Mean (SD) | 46 (6) | 72 (5) | 78 (6) |
| Gender (n) | |||
| Male | 10 | 15 | 10 |
| Female | 7 | 14 | 8 |
|
| |||
| Driving Experience (years) | |||
| Mean (SD) | 31.07 (5.78) | 54.96 (9.81) | 60.38 (6.33) |
| Typical weekly travel (n) | |||
| 0–50 miles | 2 | 10 | 5 |
| 51–100 miles | 7 | 8 | 9 |
| 101–150 miles | 4 | 4 | 1 |
| 151+ miles | 4 | 7 | 3 |
|
| |||
| UFOV Scores1 | |||
| Processing Speed | 16 (0) | 20 (7) | 27 (23) |
| Divided Attention | 33 (40) | 51 (62) | 129 (136) |
| Selective Attention (SA) | 91 (54) | 182 (91) | 395 (143) |
| SA + Same/Different | 236 (86) | 311 (93) | 499 (3) |
| Overall | 375 (140) | 564 (188) | 1050 (235) |
UFOV = Useful Field of View; Scores are reported as Mean (SD). All middle-aged drivers were classified as UFOV unimpaired.
2.2 Useful Field of View Assessment
Participants were screened for UFOV impairment using the Visual Attention Analyzer, Model 3000 (Vision Resources, Chicago, IL; Ball and Owsley, 1993; Edwards et al., 2005). A total UFOV score was calculated by summing the four UFOV subtests measuring (a) processing speed, (b) divided attention, (c) selective attention, and (d) selective attention with a simultaneous same-different discrimination at fixation. UFOV scores on each subtest represent the threshold in milliseconds at which the individual correctly responds to 75% of the trials (Ball and Owsley, 1993). Scores of at least 350 on Subtest (c) or 500 on Subtest (d) defined UFOV impairment as in previous studies (Schall et al, 2013; Rusch et al, 2013). Table 1 presents the summary statistics for UFOV scores. Scores were highest (poorest) for the oldest drivers and lowest (best) for the youngest drivers.
2.3 Experimental Design and Procedure
To test differences associated with AR cueing, the experiment followed a factorial design with AR cueing and oncoming vehicle velocity as within-subject variables. Other independent variables included age (continuous), gender, and UFOV score (continuous). Three unique pairs of intersection scenarios (varied by cue accuracy and frequency) were presented to each driver with each pair consisting of one intersection scenario including AR cues (referred to as a “cued” scenario) and one intersection scenario without AR cues (referred to as an “uncued” scenario). The order of presentation of each pair was described by the instance number (Figure 1).
Figure 1.
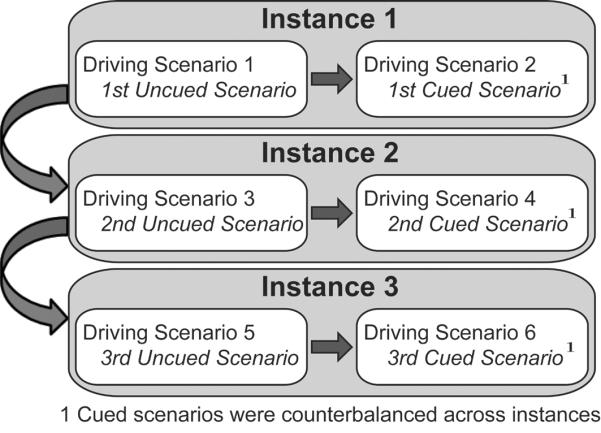
Flow Diagram of Instances. All participants completed every scenario (represented by white boxes). Each scenario included six blocks (30 trials). The diagram includes a general overview of the cue presentation. For example, the following includes one of the sequences: 1) uncued instance one, 2) cued instance one (the cue was accurate most of the time with some occasional false alarms), 3) uncued instance two, 4) cued instance two (the cue was always activated on time), 5) uncued instance three, 6) cued instance three (the cue was accurate most of the time with some occasional misses).
2.3.1 Instance and cueing design
According to Parasuraman et al. (1997), even highly accurate systems are likely to have a high rate of false alarms (FAs) and thus have the potential to be considered a nuisance to drivers. However, researchers suggest that systems with inaccuracies are not always viewed as a nuisance and FAs have actually been observed to be beneficial (Smith et al., 2010). In such cases, Wickens and Dixon (2007) have shown that a critical crossover point for performance in terms of reliability in many situations is approximately 70% (i.e., no automation may be better than automation that is less than 70% reliable).
Taking these factors into account, we included conditions with various levels of inaccuracy. Driver trust and reliance was not a focus of this study therefore system reliability was never less than 85%. In each instance (i.e., pair of two scenarios), an uncued scenario always preceded the cued scenario (Figure 1). The uncued scenarios were not counterbalanced across instances, allowing us to potentially control for confounding practice effects. Participants were informed that each of the three cued scenarios included a different level of cue reliability, namely: 1) 0% FAs and 0% misses (no misrepresentation of cue), 2) 15% FAs, 0% misses, or 3) 15% misses, 0% FAs.
The cued scenarios were counterbalanced across instances to avoid participant bias related to reliability of the AR cue. False alarms were presented between vehicles when vehicles were at a safe TTC (e.g., over six seconds away) and the driver could turn without incident. In these cases the cue would flash for one second. This presentation style was selected to mimic an actual sensor error that might occur in the real world (e.g., a random object blowing across the path of a sensor).
2.3.2 Driving simulator
The experiment was conducted using the Simulator for Interdisciplinary Research in Ergonomics and Neuroscience (SIREN) (see Rusch et al., 2013 for a detailed description). Johnson et al. (2011) observed electronic measures in SIREN have correlated with real-world safety errors, especially stop-sign errors and turning errors (e.g., ability to stay in correct lane while turning). Further, pilot testing was conducted where questionnaire data was collected to evaluate the experimental design and procedure. Most questions involved comparisons to the driver's actual vehicle. The questionnaire included questions with a likert-scale format that was based on a scale of 1 to 7 with 4 being good when comparisons were involved (i.e., suggesting the simulator was the same as their vehicle; see Emerson et al., 2010 for a detailed description). For questions that evaluated the realism of the simulator the scale was indexed where 1=`Realistic' and 7= `Not Realistic'. Results indicated that driver ratings of the simulator were comparable to those observed in the real-world. For example, comparisons of the gas pedal were rated as similar to an actual vehicle (median=4.00, mode=4.00) and roadway appearance also received good ratings (median=2.00, mode=2.00).
2.3.3 Driving scene and task design
In all scenarios, the driver's vehicle was positioned at the entrance of the intersection just beyond the painted stop strip (Figure 2), a point at which drivers tend to position themselves prior to performing a turn across opposing traffic. Road geometry (i.e., number of lanes, lane width, etc.) was similar for all scenarios.
Figure 2.

The AR advisory used to notify drivers of a potentially unsafe turning window. The cue was located in a position offset just to the left of the center of the oncoming traffic lane (i.e., the point of potential conflict with oncoming vehicles). This location was optimal because it allowed the driver to keep their attention focused on a fixed region. If the cue were further off to the left or right it would require extra eye movements to scan back and forth. Driver TTC was calculated based on a point close to this position (approximately 1.2 meters in front of the subject's vehicle).
All scenarios included six vehicle convoys, with five vehicles in each convoy (travelling at various velocities ranging between 50 and 81 mph), for a total of 30 trials per scenario. A new convoy was generated every 40 seconds. Each vehicle was assigned a set headway of 3–6 or 9–12 seconds between itself and the vehicle in front. Speed was manipulated so that there was a variable quasi-random (and thus unpredictable) gap size between each vehicle in each convoy. For example, if the first vehicle of a convoy was traveling 56 mph and the gap size between it and the following vehicle was randomized to be small (e.g., 3 sec) then the following vehicle would travel at a speed to maintain that constant headway. Drivers judged when it would be safe to make a left-turn across oncoming traffic convoys approaching the driver from the opposite direction of the intersection.
While AR seems like a promising solution for assisting older drivers with left-turns, challenges exist in terms of testing and presentation. Because intersections involve variable complexities (e.g., environmental complexity, approaching vehicle velocity) it is difficult to safely investigate the benefits of driving countermeasures in a real-world setting. Virtual simulators can be used as an alternative test bed, but they are not always ideal when driving tasks involve a lot of turns that can cause simulator adaptation syndrome. To get around this problem, researchers have modified their intersection task by avoiding actual turning maneuvers and instead captured response times for “would be made events” through button clicks (e.g., Skaar et al., 2003), partial steering wheel motions (e.g., Roenker et al., 2003), and braking (e.g., Cantin et al., 2009). Additionally, a number of hazard perception task studies have involved previewing pre-recorded video and captured RT measures using comparable methods (e.g., Horswill et al., 2008). In a similar fashion, our task involved a “would be made event”. Drivers were instructed to activate the high beam lever the moment they judged it safe to begin a turn and to release the lever the moment they felt it was unsafe.
Presentation of cueing can be particularly challenging due to ambiguity that exists in determining an appropriate placement of cues above oncoming vehicles. Tonnis et al. (2006) demonstrated that when objects are projected virtually into an environment, complications may arise in the perception of virtual position. Sign posts or pillars may provide extra location information (e.g., attaching it to the ground). In our scenarios which involved AR cues, a transparent `no turn left sign' cue assisted the driver. It was positioned where oncoming traffic crossed the intersection, subtended 10°, signaled 2–4s TTC (cf., Nowakowski et al., 2008; Caird and Hancock, 1994), and persisted until oncoming traffic passed (Figure 2).
Drivers did not complete actual turns for each trial to avoid simulator adaptation syndrome (i.e., discomfort). Instead, average turning time was collected by having participants drive around one city block and complete between one and four left-turns (depending on the comfort of the driver). Each stretch of roadway consisted of a speed limit sign (45 mph), a construction vehicle and barrels, and oncoming vehicles in the opposing lane (the driver had to pass through a gap at each stop-controlled intersection). The timing required to complete each turn was recorded. An observed reduction in estimated TTC below the time recorded to complete a full turn would suggest the system may not be advantageous to the driver.
2.4 Dependent variables
Four outcome measures were used to evaluate the effectiveness of AR cueing related to performance: Time-to-Contact (TTC), Gap Time Variation (GTV), Response Rate, and Gap Response Variation (GRV) (Table 2).
Table 2.
Outcome measures to assess effectiveness of AR cues1
| Outcome Measure | Definition |
|---|---|
| Time: | |
| Time-to-Contact (TTC) | The time in seconds between an oncoming vehicle (with variable speeds) and the participant's vehicle when the driver identified it was safe to begin a turn (Figure 2). Larger TTC values indicate duration gaps (cf., SAE J2944 definition and calculation for longer MTTC). |
| Gap Time Variation (GTV) | The variation (standard deviation) in seconds between an oncoming vehicle and the participant vehicle when the driver identified it was safe to begin a turn from scenario to scenario (i.e., all possible combinations of instance and cueing). Larger GTV values indicate larger variations gaps in gap choice. |
| Response: | |
| Response Rate | The total number of times in a scenario that a participant identified a gap in oncoming traffic and signaled it was safe to begin a turn (inclusive of both safe and unsafe responses). |
| Gap Response Variation (GRV) | The variation in response rate between an oncoming vehicle and the participant's vehicle when the driver signaled it was safe to begin a turn. Larger GRV values indicate larger variations in the frequency of responses (in each scenario). |
An additional outcome measure, Turn Time (the time in seconds needed to complete an actual turn during the city block scenario - was also collected to validate any behavior modifications participants made during the experimental task (Table 6). This outcome measure was not included in any modeling presented in the results.
2.5 Analysis
Likelihood-based methods were used to fit linear mixed models to the data for the four outcome variables. For TTC and response rate, these models estimated the effect of cueing, instance, velocity, age, gender, UFOV, and for interactions between cueing, instance, velocity, and UFOV. A preliminary analysis indicated that cueing accuracy had no effect when comparing differences among individual cued conditions (e.g., cueing with FAs versus cueing with misses). Therefore, cueing data was merged into two categories (uncued or cued) and analyzed in general terms. Follow up Tukey pair-wise tests assessed differences in least square means. Slopes were estimated for covariates, along with linear combinations of slopes when an interaction between covariates and factors was significant.
A sensitivity analysis was performed to examine the effects of outliers on these models. Outliers were identified by examining points on plots which appeared to be affecting the direction of regressions (Figures 3 and 4). For example, for TTC the results mainly suggest cueing had a substantial and consistent effect on TTC, with some exceptions. First, in several cases, regressions of instance two were not between regressions of instance one and three (e.g., most pronounced in the uncued, < 55 mph condition; Figure 3A). Additionally, in Figure 3C a substantial leap can be observed from a negative regression (instance one) to positive regressions (instance two and three). These effects were attributed to a suspected outlier. We reexamined both the model and plots following the removal of the outlier participant's data (where UFOV >1400). The removal improved the regression in Figure 3A, but not in Figure 3C. The significance of the covariates within the model did not change when the model was re-evaluated. Further, the participant outlier was not an anomaly for other outcome variables. Therefore, there was no apparent justification to remove the outlier because it only affected a small portion of the results.
Figure 3.

Time to Contact (TTC) for driver types as a function of cueing (columns), UFOV (horizontal axis), velocity (vertical axis), and instance (lines).
Figure 4.

Response rate for driver types as a function of cueing (columns), UFOV (x axis), velocity (rows), and instance (lines).
For GTV and GRV, models were tested for differences between cueing, instance (order), age, gender, UFOV, and for interactions between cueing, instance, and UFOV. Most participants only responded 1–3 times per block and thus data was limited in terms of replication on the velocity variable (e.g., in the case of one response only one velocity category was reported for that block). Because GTV and GRV dealt with a measure of standard deviation, analyzing models which included velocity typically produced estimates of zero therefore the velocity variable was excluded from these models due to lack of data at each velocity level.
When testing for effects of GTV, an instance by UFOV interaction (F (2, 1046) = 7.92, p < 0.01) was observed. This result was also considered spurious because slope estimates did not follow a logical sequence and was likely caused by the outlier as previously described (instance one slope = 0.0006 (0.0003) and instance three slope = 0.0005 (0.0003) were different from instance two slope = 0.0003 (0.0003); p < 0.01). The model and plots were reexamined following removal of the outlier. Similar to TTC, the significance of the covariates within the model did not change when the model was re-evaluated and the participant outlier was not an anomaly for other outcome variables.
Perceived differences between cueing conditions were evaluated through driver ratings collected from a questionnaire. The questionnaire included questions with a likert-scale format that was based on a scale of 1 to 5 where 1 was indexed as poor, 3 as neutral, and 5 as good in most cases. For example, for cue effectiveness 1= `Very Distracting', 3= `Neutral', and 5= `Very Effective'. Special exceptions which did not index 3= `Neutral' are denoted in Table 7. Likelihood-based methods were also used to fit linear mixed models to the data for average ratings of each question. The model estimated the effects of age, gender, UFOV (middle-age unimpaired, older unimpaired, old impaired), cueing (0% FAs/0% misses; 15% FAs; 15% misses), a two-way interaction between gender and cueing, a two-way interaction between UFOV and cueing, and a three-way interaction between gender, UFOV, and cueing.
Table 7.
Average Responses to Visual Cue Questionnaire
| Reliability1 | Timing2 | Effectiveness1 | Overall Judgment1 | |
|---|---|---|---|---|
| 0% False Alarms (FAs), 0% Misses | 3.17(0.17) | 2.44(0.11) | 3.22(0.14) | 3.36(0.13) |
| 15% FAs, 0% Misses | 3.28(0.17) | 2.52(0.10) | 3.25(0.14) | 3.38(0.13) |
| 0%FAs, 15% Misses | 2.99(0.17) | 2.42(0.11) | 3.22(0.14) | 3.29(0.13) |
Responses were based on a five-point likert scale numbered 1–5. On average, ratings fell between 2.5 and 3.5 which typically corresponded to a `neutral' rating.
The scale for timing was presented as: 1) Much too short, 2) Somewhat short, 3) Acceptable, 4) Somewhat long, 5) Much too long. Therefore ratings between 2.5 and 3.5 corresponded to a positive (not neutral) response.
3. Results
The following results include findings for outcomes related to time, response rate, actual turning time, and driver ratings of the different cueing designs. There were no significant findings for gender and therefore this factor was not reported. Results on GTV were also excluded due to a lack of substantial findings. In summary, notable observations were three-fold. First, drivers with the poorest UFOV became less conservative with less variation in their performance over time for measures of both timing and response rate (more comparable behavior to middle-aged drivers). Additionally, TTCs for all drivers were less variable in the cued conditions than the uncued conditions.
Secondly, main effects of instance for TTC and response rate were not suggestive of potential practice or fatigue effects. Both of these measures included multiple interactions between instance, cueing, and other factors which were suggestive of performance modifications associated with cueing exposure. For example, a two-way interaction was observed between cueing and instance for timing, where TTCs were typically longest for the first (TTC = 4.91 (0.21); 95% CI [4.46, 5.21]) and second (TTC = 5.02 (0.19); 95% CI [4.48, 5.20]) instances of the uncued condition. Relevant higher order interactions are described in the subsequent sections. Thirdly, for velocity, TTC for vehicles traveling at slower speeds (< 55 mph) was 0.39 to 0.59 seconds shorter than that observed for vehicles traveling at faster speeds (≥65 mph; p < 0.01).
3.1 Outcomes associated with Time: TTC
Table 3 presents the results from a linear mixed model that tested for effects of cueing, instance, velocity, and UFOV on TTC. Individual three-way interactions were not interpreted given the significant four-way interaction. Figure 3 shows the significant four-way interaction occurring between all of these variables (p<0.01).
Table 3.
Fixed Effects for Time to Contact (TTC).
| Effect | Numerator Degrees of Freedom | Denominator Degrees of Freedom | F | p |
|---|---|---|---|---|
| Cueing | 1 | 92.2 | 5.95 | 0.02 |
| Instance | 2 | 2464 | 5.10 | 0.01 |
| Velocity | 3 | 2449 | 3.43 | 0.02 |
| Gender | 1 | 55 | 0.06 | 0.80 |
| Age | 1 | 54.5 | 11.14 | <0.01 |
| UFOV | 1 | 58.5 | 0.51 | 0.48 |
| Cueing*Instance | 2 | 2475 | 5.31 | 0.01 |
| Cueing*Velocity | 3 | 2467 | 1.92 | 0.12 |
| Cueing*UFOV | 1 | 95.9 | 2.48 | 0.12 |
| Instance* UFOV | 2 | 2475 | 3.60 | 0.03 |
| Velocity* UFOV | 3 | 2452 | 16.24 | <0.01 |
| Instance*Velocity | 6 | 2445 | 1.63 | 0.14 |
| Cueing*Instance* UFOV | 2 | 2480 | 7.30 | <0.01 |
| Cueing*Velocity* UFOV | 3 | 2461 | 3.45 | 0.02 |
| Instance*Velocity* UFOV | 6 | 2458 | 3.42 | <0.01 |
| Cueing*Instance*Velocity* UFOV | 6 | 2466 | 5.40 | <0.01 |
3.1.1 Effects associated with cueing and UFOV
Drivers with the highest (poorest) UFOV scores became increasingly conservative as velocity increased for both uncued and cued scenarios (see Figure 3, TTCs on the right side of each plot increase as velocity increases). This finding did not hold for drivers with the lowest (best) UFOV scores, who maintained a fairly consistent TTC average for all velocity ranges (Figure 3, TTC on the left side of each plot remains relatively constant for all levels of velocity). When considering the two-way interaction between UFOV score and velocity, TTC did not depend on UFOV, particularly for speeds less than 55 mph. Plots for the highest velocities (i.e., ≥65 mph; Figures 3E–3H) show that regressions were more positive as UFOV scores increased. These observations were supported by the significant interaction between velocity and UFOV (p < 0.01), where slopes were very small (minimum of −0.0015 for the lowest speeds and maximum of 0.0003 for the highest speeds), with differences ranging between 0.0003 and 0.0018 (p < 0.01). When considering the separation between these regressions in relationship to UFOV and instance, we note that over time the gap became smaller as demonstrated by the two-way UFOV by instance interaction (p = 0.03) where the slope was more negative for instance one (slope = −0.0009, SE = 0.0007) than for instances two and three (slope = −0.0003, SE = 0.0007; p = 0.02). This pattern suggests UFOV impaired drivers behaved more conservatively for higher speeds of oncoming traffic and the earliest instance of the experiment. Other notable findings were observed for age (typically associated with UFOV impairment). Age affected TTC with the oldest drivers having the highest TTC (slope = 0.055, SE = 0.016) indicating that they were more conservative.
3.1.2 General effects of cueing
Drivers' TTC values were less variable in the cued conditions than the uncued conditions, but the magnitude depended on the driver and the roadway situation. Plots of TTC at velocities < 75 mph for the uncued condition (Figures 3A, 3C, and 3E) had regression lines that were more parallel and closer to each other compared to the cued condition (Figures 3B, 3D, and 3F). Drivers in the cued conditions (95% CI [4.34, 5.05]) had a mean TTC that was 0.17 seconds shorter (d = 0.39) than in uncued conditions (p = 0.03, 95% CI [4.50, 5.23]), which suggests that drivers were less conservative when responding to cued vehicles.
3.2 Outcomes associated with Response: Response Rate
Table 4 presents the results from a linear mixed model that tested for effects of cueing, instance, velocity, and UFOV on response rate. Figure 4 shows a significant four-way interaction occurring between all of these variables (p < 0.01). The plots in Figure 4 generally mirror those in Figure 3 (as would be expected) and suggest that drivers are most comfortable selecting safe gaps to turn when vehicles approach at intermediate speeds (55–64 mph and 65–75 mph) compared to when vehicles approach at lower (< 54 mph) and higher speeds (> 75 mph).
Table 4.
Fixed Effects for Response Rate.
| Effect | Numerator Degrees of Freedom | Denominator Degrees of Freedom | F | P |
|---|---|---|---|---|
| Cueing | 1 | 60.9 | 7.39 | <0.01 |
| Instance | 2 | 1359 | 28.16 | <0.01 |
| Velocity | 3 | 1359 | 85.06 | <0.01 |
| Gender | 1 | 59.8 | 0.82 | 0.37 |
| Age | 1 | 59.6 | 4.54 | 0.04 |
| UFOV | 1 | 59.8 | 0.51 | 0.48 |
| Cueing*Instance | 2 | 1359 | 5.97 | <0.01 |
| Cueing*Velocity | 3 | 1359 | 10.54 | <0.01 |
| Cueing*UFOV | 1 | 61.2 | 0.54 | 0.47 |
| Instance* UFOV | 2 | 1359 | 13.98 | <0.01 |
| Velocity* UFOV | 3 | 1359 | 7.23 | <0.01 |
| Instance*Velocity | 6 | 1359 | 5.04 | <0.01 |
| Cueing*Instance* UFOV | 2 | 1359 | 4.30 | 0.01 |
| Cueing*Velocity* UFOV | 3 | 1359 | 1.89 | 0.13 |
| Instance*Velocity* UFOV | 6 | 1359 | 2.22 | 0.04 |
| Cueing*Instance*Velocity* UFOV | 6 | 1359 | 14.78 | <0.01 |
3.2.1 Effects associated with UFOV
UFOV impairment played an important role in gap selection. There was a smaller instance by UFOV effect in cued scenarios versus uncued scenarios, as demonstrated by regression lines in Figure 4 (i.e., lines are closer together and more parallel in panels B, D, F, H versus A, C, E, G). Specifically, for intermediate speed levels, as UFOV scores increased, drivers responded more conservatively in selecting gaps. Drivers with the poorest UFOV responded less often to vehicles travelling 55–75 mph (average slope = −0.00056, SE= 0.00038) compared to vehicles travelling at other velocities (average slope = 0.00004, SE= 0.00038; p < 0.05). The oldest individuals, typically having the largest UFOV scores, responded the least often (slope = −0.019, SE = 0.008).
3.2.2 General effects of cueing
Cueing positively affected response rate for drivers of all ages and this effect increased over time where instance (first, second, or third) and cueing all had significant effects. Drivers made 0.27 (0.0002) additional safe responses in cued conditions (95% CI [1.64, 2.01]) than in uncued conditions (95% CI [1.37, 1.74]; p < 0.01; d = 1.19). The difference between the first and third uncued conditions (difference = −0.45; p < 0.01; d = 0.31) was significantly larger than the cued conditions (difference = −0.24; p = 0.03; d = 0.16). For cueing, response rates were generally quite stable. In contrast, for uncued scenarios there were large changes in both instance and velocity, which depended on UFOV.
3.3 Outcomes associated with Response: GRV
Table 5 presents the results from a linear mixed model that tested for effects of cueing, instance, and UFOV on GRV (where larger values indicate larger variation in responses). There was a three-way interaction between cueing, instance, and UFOV (Figure 5). When an AR cue was shown, the mean GRV decreased by an average 0.33 of a response. Further, variation for drivers with the poorest UFOV appeared to decrease over time, especially in the uncued scenarios (Figure 5A). The decrease in GRV was also reflected in an interaction between cueing and instance (Figure 6).
Table 5.
Fixed Effects for Gap Response Variation (GRV).
| Effect | Numerator Degrees of Freedom | Denominator Degrees of Freedom | F | p |
|---|---|---|---|---|
| Cueing | 1 | 307 | 24.90 | <0.01 |
| Instance | 2 | 306 | 2.49 | 0.08 |
| Gender | 1 | 59 | 2.73 | 0.10 |
| Age | 1 | 58.6 | 1.51 | 0.22 |
| UFOV | 1 | 59 | 0.00 | 1.00 |
| Cueing*Instance | 2 | 306 | 5.22 | 0.01 |
| Cueing*UFOV | 1 | 310 | 3.71 | 0.06 |
| Instance* UFOV | 2 | 306 | 4.23 | 0.02 |
| Cueing*Instance* UFOV | 2 | 306 | 6.56 | <0.01 |
Figure 5.
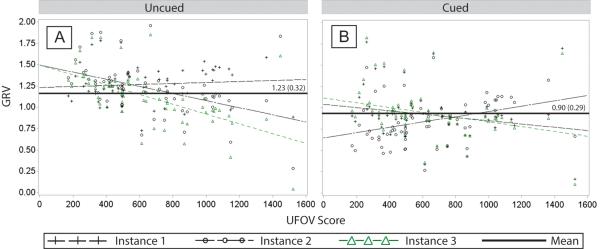
GRV three-way interaction between cueing, instance, and UFOV
Figure 6.
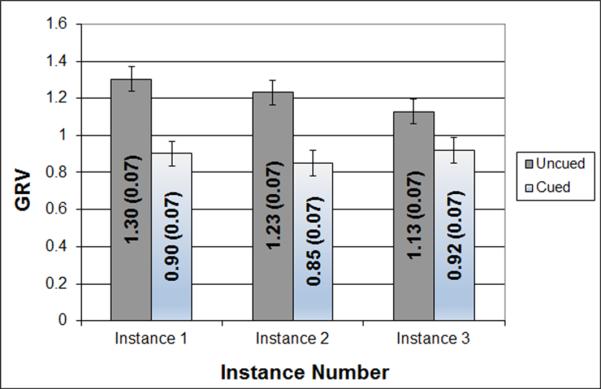
GRV interaction between cueing and instance.
3.4 Summary of Turn Time Data
Left-turn drive time data were reported for 49 drivers (Table 6), as fifteen did not complete the drive portion of the experiment due to discomfort in the simulator.
Table 6.
Summary statistics on actual turning time
| Age Group | N | Average Turns1 | Turning Time (sec) |
|---|---|---|---|
| Middle-Aged | 15 | 3.27 (1.28) | 2.37 (1.21) |
| Older UFOV Unimpaired | 21 | 3.43 (1.21) | 2.97 (1.30) |
| Older UFOV Impaired | 13 | 3.46 (1.13) | 3.00 (0.97) |
Drivers completed between one and four left-turns. Those drivers who were not able to complete all four left-turns often stopped short due to simulator adaptation syndrome.
3.5 Outcomes associated with driver ratings of cueing
A linear mixed model that tested the effects of age, gender, UFOV, and cueing on driver ratings of cueing indicated no significant results. Table 7 shows the descriptive statistics for all three cueing conditions.
4. Discussion
This study investigated the effects of AR cues on middle-aged and older drivers with a range of UFOV impairment, deciding on when to make left-turns across oncoming traffic at a rural stop-controlled intersection. We tested the hypothesis that AR cues would affect driver performance indexed by decreases of TTC and GTV, increased response rate, and decreased GRV measures especially for drivers with poor UFOV scores. Results suggested that AR cueing improved TTC estimation and increased response rate for drivers with and without UFOV impairment. Additionally, variation in gap response rate decreased when AR cues were present. As expected, driver performance of individuals with the highest UFOV scores was modified so that it became more similar to middle-aged drivers. General learning did not appear to confound cueing effects. Additionally, driver ratings indicated that neither reliability nor distraction affected the perceived usefulness of the cues. Females were not more conservative as we had anticipated. This finding may have been due to a small sample size, however, there are mixed reviews on such trends, it is thus difficult to draw conclusions.
4.1 Outcomes associated with Time
Drivers estimated TTC was substantially shorter in cued conditions than in uncued conditions, suggesting AR cues can enhance driver performance during left-turns across oncoming traffic at rural stop sign-controlled intersections. Drivers adjusted their behavior to become consistent (more dependent) with the AR cue, especially drivers with the poorest UFOV scores. It also appears that these adaptations carried over to scenarios when the cue was not present. These findings were observed in a beneficial direction (decreases in performance over time) and thus fatigue effects were ruled out. Changes in behavior are likely the result of cue-related exposure because differences were only present for uncued scenarios (not cued scenarios).
Differences between older UFOV impaired and unimpaired drivers may be related to decision strategies. Researchers are finding that older drivers rely primarily or exclusively on perceived distance to perform gap-acceptance judgments and suggest that it may be related to a reduced ability to integrate time based on speed and distance information with increasing age (Yan et al., 2007; Staplin et al., 1993). Such impairments could likely be linked with UFOV abilities and thus explain why AR cueing was more helpful to them.
Although we observed reductions in estimated safe TTC (cf., Chan et al., 2005; Nowakowski et al., 2008 for definitions on safe TTC), the mean TTC never fell below the threshold for actual drive time (3 seconds; Table 6). Thus, we did not consider there to be a critical overlap between chosen gaps and drive time required to complete a safe turn. These findings may suggest training benefits of the technology and user trust implications. It also illustrates how drivers might adapt to cues.
When considering the effect of velocity on TTC, vehicles traveling at slower speeds were estimated to arrive 0.39 to 0.58 seconds sooner than vehicles traveling at faster speeds (consistent with Marmeleira et al., 2007). FARS and GES reported that most collisions (fatal, injury and property-damage only crashes) occur when vehicles are travelling at speeds ranging between 35 and 40 mph (National Highway Traffic and Safety Administration, 2003). Despite the fact that these crash data may be a greater reflection of exposure than velocity, drivers make less accurate estimations of TTC for slower moving vehicles. These crash statistics may reflect drivers' tendency to rely on distance and not speed (Hunt et al., 2011) and illustrate the potential benefit of in-vehicle driver assistance systems. Additionally, because cues appear to have a strong potential for affecting driver behavior, they may likely provide benefits for interpreting the trajectory of oncoming vehicles travelling at low velocities. This is an area of potential future work.
4.2 Outcomes associated with Response
We expected that exposure to the AR cue would cause drivers to be less likely to rely on compensatory strategies and potentially help alleviate erratic decisions, especially for those drivers with the poorest UFOV abilities. This result was reflected through outcome measures of response rate and GRV. Drivers made approximately one-fourth more of a response (a judgment of a safe turning opportunity) in cued conditions than in uncued conditions and GRV appeared to decrease for all drivers in scenarios that contained AR cues. Further, drivers responded most frequently in the latest part of the study, especially in cued scenarios. The cued by instance interaction was most likely affected by UFOV and velocity given the multiple interactions between each of these factors.
The increase in response rate is consistent with the findings noted for TTC. Drivers appeared to adapt their behavior as shown by increased compliance to the cues over time. Comparable to findings with TTC, differences were exclusive between cued and uncued scenarios and thus practice effects were not likely. For UFOV, in contrast, the opposite was observed to be true whereas drivers with the poorest UFOV made fewer responses in later instances. This finding may be the result of a fatigue effect or compensation strategy whereas drivers chose to respond less frequently to avoid risk.
4.3 Outcomes associated with driver ratings
Preliminary analysis of the data set suggested cueing accuracy (i.e., reliability) did not affect performance. Driver ratings were used to further assess cueing reliability and distraction. Ratings for reliability fell between 2.99 and 3.17 and were neutral on average with no significant differences between cueing conditions. Differences across conditions would have suggested variable levels of trust (consistent with Wickens and Dixon, 2007).
Distraction was assessed based on ratings of effectiveness and an overall judgment (in terms of annoyance) of the cue. Ratings for effectiveness were neutral on average, ranging between 3.22 and 3.25, with no significant differences between conditions. Low ratings would have suggested that the cue was considered to be distracting. Ratings on the nuisance factor ranged between 3.29 and 3.36 and were neutral on average with no significant differences between conditions. Low ratings would have suggested that the cue was considered to be annoying. Because this study dealt with an older population particularly susceptible to performance deficits in relation to the division of attention, these findings are useful as they illustrate the potential benefits of AR cueing which can be yielded without being a distraction.
4.4 Implications, limitations, and future work
Results suggested that drivers responded to the presentation of AR cues, especially those with UFOV impairments. However, mean TTC measures never fell below the threshold for actual drive time necessary to make a full left-turn, as confirmed by having drivers complete a series of real turns. Therefore, we conclude that the cues were effective in motivating driver responses which did not result in safety violations with regard to the amount of time to turn. The drivers' tendency to comply with technology illustrates the need for careful design in terms of cue timing. Shladover et al. (2005) proposed cues should be presented with enough time to allow for the full sequence of events involved with a left-turn (e.g., decision making time, creeping into the turn, etc.). They and others (Chan et al., 2005; Nowakowski et al., 2008) propose 3.5 to 4.5 seconds for collision avoidance alerts that signal safe left-turns (based upon on-road evaluations). While their research provides a helpful guide, our findings suggest that there is greater need for developing timing parameters that consider age-related declines that affect cognition and motor movements. For example, gap selection can be dependent on driver UFOV impairment and approaching vehicle velocity. Timing parameters that take these factors into account have the potential to reduce erratic decisions and the frequency of left-turns across opposing stream of traffic collisions.
While our findings are compelling, data was limited for actual drive time. Further research that involves more replication of actual drive time would help to strengthen our argument. Factors such as an obstructed view or the presence of a tailing vehicle could also play a role in the driver's choice of when to go (Chen et al., 2013; Dawson et al., 2013). The current study did not explore such scenarios as we did not manipulate distraction (e.g., dual-task performance) or social pressure. Other variables important to consider are reliability (below 85%), testing in real world settings that involve actual turns, and evaluating alternative strategies of using vehicle distance versus speed judgments in choosing gaps. All of these areas merit further investigation. Further, future work that examines a between-subject design (i.e., one group receiving cued and uncued conditions and one group receiving only the uncued condition) would potentially provide more support for dissociating changes in behavior resulting from cue exposure versus general learning.
Highlights.
Augmented reality cueing improved driver time-to-contact estimation.
Driver judgments of safe turning opportunities increased when cues were presented.
Variation in gap response rates decreased when cues were presented.
Driver ratings indicated that augmented reality cueing was not distracting.
Acknowledgements
Funding for this study was made possible by Grants from the National Institute of Health (NIH R01AG026027) and from support provided through the Iowa Injury Prevention Research Center, the Heartland Center for Occupational Health and Safety, and the Iowa Center for Research by Undergraduates.
Footnotes
Publisher's Disclaimer: This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final citable form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
References
- Alexander J, Barham P, Black I. Factors influencing the probability of an incident at a junction: results from an interactive driving simulator. Accident Analysis & Prevention. 2002;34(6):779–792. doi: 10.1016/s0001-4575(01)00078-1. [DOI] [PubMed] [Google Scholar]
- Azuma RT. A survey of augmented reality. Teleoperators and Virtual Environments. 1997;6(4):355–385. [Google Scholar]
- Azuma R, Baillot Y, Behringer R, Feiner S, Julier S, MacIntyre B. Recent advances in augmented reality. Computer Graphics and Applications, IEEE. 2001;21(6):34–47. [Google Scholar]
- Ball K, Owsley C. Identifying Correlates of Accident Involvement for the Older Driver. Human Factors. 1991;33(5):583–595. doi: 10.1177/001872089103300509. [DOI] [PubMed] [Google Scholar]
- Ball K, Owsley C. The useful field of view test: a new technique for evaluating age-related declines in visual function. Journal of the American Optometric Association. 1993;64(1):71–79. [PubMed] [Google Scholar]
- Bao S, Boyle LN. Driver performance at two-way stop-controlled intersections on divided highways. Transportation Research Record: Journal of the Transportation Research Board. 2008;2069(1):26–32. [Google Scholar]
- Bao S, Boyle LN. Age-related differences in visual scanning at median-divided highway intersections in rural areas. Accident Analysis amp; Prevention. 2009;41(1):146–152. doi: 10.1016/j.aap.2008.10.007. [DOI] [PubMed] [Google Scholar]
- Bliss JP. Alarm reaction patterns by pilots as a function of reaction modality. The International Journal of Aviation Psychology. 1997;7(1):1–14. [Google Scholar]
- Bliss JP, Acton SA. Alarm mistrust in automobiles: how collision alarm reliability affects driving. Applied ergonomics. 2003;34(6):499–509. doi: 10.1016/j.apergo.2003.07.003. [DOI] [PubMed] [Google Scholar]
- Caird JK, Hancock PA. The perception of arrival time for different oncoming vehicles at an intersection. Ecological Psychology. 1994;6(2):83–109. [Google Scholar]
- Caird JK, Hancock PA. Left-turn and gap acceptance crashes. In: Dewar RE, Olson P, editors. Human factors in traffic safety. Lawyers & Judges Publishing; Tucson, AZ: 2002. [Google Scholar]
- Cantin V, Lavallière M, Simoneau M, Teasdale N. Mental workload when driving in a simulator: Effects of age and driving complexity. Accident Analysis & Prevention. 2009;41(4):763–771. doi: 10.1016/j.aap.2009.03.019. [DOI] [PubMed] [Google Scholar]
- Chan CY, Ragland DR, Shladover SE, Misener JA, Marco D. Observations of driver time gap acceptance at intersections in left-turn across-path-opposite-direction scenarios. Transportation Research Record: Journal of the Transportation Research Board. 2005;1910(1):10–19. [Google Scholar]
- Chen KH, Anderson SW, Rusch M, Aksan N, Dawson J, Rizzo M. “Choking under pressure” in older drivers. Seventh International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design; 2013. [PMC free article] [PubMed] [Google Scholar]
- Darzentas J, McDowell MRC, Cooper DF. Minimum acceptable gaps and conflict involvement in a simple crossing manoeuvre. Traffic Engineering & Control. 1980;21(2) [Google Scholar]
- Dawson JD, Yu L, Chen KH, Rusch M, Johnson AM, Aksan NS, Rizzo M. Neuropsychological Predictors of Safety in Urban Left-Turn Scenarios. 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design; 2013. [PMC free article] [PubMed] [Google Scholar]
- Dewar DE. Age difference: drivers old and young. In: Dewar DE, Olson P, editors. Human factors in driving safety. Lawyers & Judges Publishing; Tucson, AZ: 2002. [Google Scholar]
- Edwards JD, Vance DE, Wadley VG, Cissell GM, Roenker DL, Ball KK. Reliability and validity of useful field of view test scores as administered by personal computer. Journal of Clinical and Experimental Neuropsychology. 2005;27(5):529–543. doi: 10.1080/13803390490515432. [DOI] [PubMed] [Google Scholar]
- Emerson J, Dawson J, Uc MD, Ergun Y, Anderson SW, Rizzo M. Predicting Simulator Adaptation Syndrome from Driver Visual Characteristics. Transportation Research Board 89th Annual Meeting (No. 10-1747).2010. [Google Scholar]
- Gelau C, Sirek J, Dahmen-Zimmer K. Effects of time pressure on left-turn decisions of elderly drivers in a fixed-base driving simulator. Transportation research part F: traffic psychology and behaviour. 2011;14(1):76–86. [Google Scholar]
- Hakamies-Blomqvist L, Sirén A, Davidse R. Older drivers: a review. Swedish National Road and Transport Research Institute; 2004. [Google Scholar]
- Ho G, Scialfa CT, Caird JK, Graw T. Visual search for traffic signs: The effects of clutter, luminance, and aging. Human Factors: The Journal of the Human Factors and Ergonomics Society. 2001;43(2):194–207. doi: 10.1518/001872001775900922. [DOI] [PubMed] [Google Scholar]
- Horswill MS, Marrington SA, McCullough CM, Wood J, Pachana NA, McWilliam J, Raikos MK. The hazard perception ability of older drivers. The Journals of Gerontology Series B: Psychological Sciences and Social Sciences. 2008;63(4):P212–P218. doi: 10.1093/geronb/63.4.p212. [DOI] [PubMed] [Google Scholar]
- Hunt M, Harper DN, Lie C. Mind the gap: Training road users to use speed and distance when making gap-acceptance decisions. Accident Analysis & Prevention. 2011;43(6):2015–2023. doi: 10.1016/j.aap.2011.05.020. [DOI] [PubMed] [Google Scholar]
- Johnson A, Dawson J, Rizzo M. Lateral Control in a Driving Simulator: Correlations with Neuropsychological Tests and On-Road Safety Errors. Driving Assessment 2011: 6th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design; 2011. [PMC free article] [PubMed] [Google Scholar]
- Kausler DH. Experimental psychology, cognition, and human aging. Springer-Verlag Publishing; 1991. [Google Scholar]
- Kearney JK, Rizzo M, Severson J. Virtual reality and neuroergonomics. In: Parasuraman R, Rizzo M, editors. Neuroergonomics: The brain at work. Oxford University Press; New York, NY: 2007. pp. 253–274. [Google Scholar]
- Kramer AF, Cassavaugh N, Horrey WJ, Becic E, Mayhugh JL. Influence of age and proximity warning devices on collision avoidance in simulated driving. Human Factors: The Journal of the Human Factors and Ergonomics Society. 2007;49(5):935–949. doi: 10.1518/001872007X230271. [DOI] [PubMed] [Google Scholar]
- Laberge JC, Creaser JI, Rakauskas ME, Ward NJ. Design of an intersection decision support (IDS) interface to reduce crashes at rural stop-controlled intersections. Transportation Research Part C: Emerging Technologies. 2006;14(1):39–56. [Google Scholar]
- Lajunen T, Summala H. Driving experience, personality, and skill and safety-motive dimensions in drivers' self-assessments. Personality and Individual Differences. 1995;19(3):307–318. [Google Scholar]
- Lajunen T, Corry A, Summala H, Hartley L. Cross-cultural differences in drivers' self-assessments of their perceptual-motor and safety skills: Australians and Finns. Personality and Individual Differences. 1998;24(4):539–550. [Google Scholar]
- Lee JD, McGehee DV, Brown TL, Reyes ML. Collision warning timing, driver distraction, and driver response to imminent rear-end collisions in a high-fidelity driving simulator. Human Factors: The Journal of the Human Factors and Ergonomics Society. 2002;44(2):314–334. doi: 10.1518/0018720024497844. [DOI] [PubMed] [Google Scholar]
- Lees MN, Lee JD. The influence of distraction and driving context on driver response to imperfect collision warning systems. Ergonomics. 2007;50(8):1264–1286. doi: 10.1080/00140130701318749. [DOI] [PubMed] [Google Scholar]
- Maltz M, Shinar D. Eye movements of younger and older drivers. Human Factors: The Journal of the Human Factors and Ergonomics Society. 1999;41(1):15–25. doi: 10.1518/001872099779577282. [DOI] [PubMed] [Google Scholar]
- Maltz M, Shinar D. Imperfect in-vehicle collision avoidance warning systems can aid drivers. Human Factors: The Journal of the Human Factors and Ergonomics Society. 2004;46(2):357–366. doi: 10.1518/hfes.46.2.357.37348. [DOI] [PubMed] [Google Scholar]
- Marmeleira JF, Ferreira IS, Godinho MB, Fernandes OM. Time-to-arrival and Useful Field of View: Associations with reported driving difficulties among older adults. Proceedings of the 4th International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design.2007. pp. 91–97. [Google Scholar]
- McGwin G, Jr, Brown DB. Characteristics of traffic crashes among young, middle-aged, and older drivers. Accident Analysis & Prevention. 1999;31(3):181–198. doi: 10.1016/s0001-4575(98)00061-x. [DOI] [PubMed] [Google Scholar]
- National Highway Traffic Safety. US Department of Transportation; Washington, DC: 2004. Administration. Traffic safety facts 2003: a compilation of motor vehicle crash data from the Fatality Analysis Reporting System and the General Estimates System. (Publication no. DOT HS 809 775) [Google Scholar]
- Nowakowski C, Cody D, O'Connell J. Comparison of infrastructure and in-vehicle driver interfaces for left-turn warnings. Transportation Research Record: Journal of the Transportation Research Board. 2008;2069(1):33–40. [Google Scholar]
- Oxley J, Fildes B, Corben B, Langford J. Intersection design for older drivers. Transportation Research Part F: Traffic Psychology and Behaviour. 2006;9(5):335–346. [Google Scholar]
- Parasuraman R, Hancock PA, Olufinboba O. Alarm effectiveness in driver centered collision-alert systems. Ergonomics. 1997;40:390–399. doi: 10.1080/001401397188224. [DOI] [PubMed] [Google Scholar]
- Parsonson BS, Isler RB, Hansson GJ. Transit New Zealand Research Report (No. 56) 1996. Driver behaviour at rural T-Intersections. [Google Scholar]
- Pollatschek MA, Polus A, Livneh M. A decision model for gap acceptance and capacity at intersections. Transportation Research Part B: Methodological. 2002;36(7):649–663. [Google Scholar]
- Preston H, Storm R, Donath M, Shankwitz C. Review of Minnesota's rural crash data: Methodology for identifying intersections for intersection decision support (IDS) Minnesota Department of Transportation; Minneapolis, MN: 2004. [Google Scholar]
- Retting RA, Weinstein HB, Solomon MG. Analysis of motor-vehicle crashes at stop signs in four US cities. Journal of Safety Research. 2003;34(5):485–489. doi: 10.1016/j.jsr.2003.05.001. [DOI] [PubMed] [Google Scholar]
- Roenker DL, Cissell GM, Ball KK, Wadley VG, Edwards JD. Speed-of-processing and driving simulator training result in improved driving performance. Human Factors: The Journal of the Human Factors and Ergonomics Society. 2003;45(2):218–233. doi: 10.1518/hfes.45.2.218.27241. [DOI] [PubMed] [Google Scholar]
- Romoser MR, Fisher DL. The effect of active versus passive training strategies on improving older drivers' scanning in intersections. Human Factors: The Journal of the Human Factors and Ergonomics Society. 2009;51(5):652–668. doi: 10.1177/0018720809352654. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Rusch ML, Schall MC, Jr, Gavin P, Lee JD, Dawson JD, Vecera S, Rizzo M. Directing driver attention with augmented reality cues. Transportation research part F: traffic psychology and behaviour. 2013;16:127–137. doi: 10.1016/j.trf.2012.08.007. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Schall MC, Jr., Rusch ML, Lee JD, Vecera S, Rizzo M. Attraction without distraction: Effects of augmented reality cues on driver hazard perception. Journal of Vision. 2010;10(7):236–236. [Google Scholar]
- Schall MC, Rusch ML, Lee JD, Dawson JD, Thomas G, Aksan N, Rizzo M. Augmented reality cues and elderly driver hazard perception. Human Factors: The Journal of the Human Factors and Ergonomics Society. 2013;55(3):643–658. doi: 10.1177/0018720812462029. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Scialfa CT, Guzy LT, Leibowitz HW, Garvey PM, Tyrrell RA. Age differences in estimating vehicle velocity. Psychology and aging. 1991;6(1):60. doi: 10.1037//0882-7974.6.1.60. [DOI] [PubMed] [Google Scholar]
- Shladover SE, VanderWerf J, Ragland DR, Chan CY. Design of alert criteria for an intersection decision support system. Transportation Research Record: Journal of the Transportation Research Board. 2005;1910(1):1–9. [Google Scholar]
- Sifrit KJ, Stutts J, Staplin L, Martell C. Intersection Crashes among Drivers in their 60s, 70s and 80s. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; SAGE Publications; Sep, 2010. pp. 2057–2061. [Google Scholar]
- Skaar N, Rizzo M, Stierman L. Traffic entry judgments by aging drivers. Second International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design.Jul, 2003. [Google Scholar]
- Smith K, Källhammer JE. Driver acceptance of false alarms to simulated encroachment. Human Factors: The Journal of the Human Factors and Ergonomics Society. 2010;52(3):466–476. doi: 10.1177/0018720810372218. [DOI] [PubMed] [Google Scholar]
- SAE International . SAE Recommended Practice J2944: Operational Definitions of Driving Performance Measures and Statistics (Draft) Society of Automotive Engineers; Warrendale, PA: 2012. [Google Scholar]
- Sorkin RD. FORUM: Why are people turning off our alarms? The Journal of the Acoustical Society of America. 1988;84:1107. [Google Scholar]
- Staplin L, Lococo K, Sim J. Traffic maneuver problems of older drivers: Final technical report (No. FHWA-RD-92-092) 1993. [Google Scholar]
- Staplin L. Simulator and field measures of driver age differences in left-turn gap judgments. Transportation Research Record. 1995;(1485):49–55. [Google Scholar]
- Tonnis M, Klinker G. Effective control of a car driver's attention for visual and acoustic guidance towards the direction of imminent dangers. Proceedings of the 5th IEEE and ACM International Symposium on Mixed and Augmented Reality; IEEE Computer Society; Oct, 2006. pp. 13–22. [Google Scholar]
- Wickens CD, Dixon SR. The benefits of imperfect diagnostic automation: A synthesis of the literature. Theoretical Issues in Ergonomics Science. 2007;8(3):201–212. [Google Scholar]
- Yan X, Radwan E, Guo D. Effects of major-road vehicle speed and driver age and gender on left-turn gap acceptance. Accident Analysis & Prevention. 2007;39(4):843–852. doi: 10.1016/j.aap.2006.12.006. [DOI] [PubMed] [Google Scholar]