

Abstract
The population of older adults in America is expected to reach an unprecedented level in the near future. Some of them have difficulties with performing daily tasks and caregivers may not be able to match pace with the increasing need for assistance. Robots, especially mobile manipulators, have the potential for assisting older adults with daily tasks enabling them to live independently in their homes. However, little is known about their views of robot assistance in the home. Twenty-one independently living older Americans (65–93 years old) were asked about their preferences for and attitudes toward robot assistance via a structured group interview and questionnaires. In the group interview, they generated a diverse set of 121 tasks they would want a robot to assist them with in their homes. These data, along with their questionnaire responses, suggest that the older adults were generally open to robot assistance but were discriminating in their acceptance of assistance for different tasks. They preferred robot assistance over human assistance for tasks related to chores, manipulating objects, and information management. In contrast, they preferred human assistance to robot assistance for tasks related to personal care and leisure activities. Our study provides insights into older adults' attitudes and preferences for robot assistance with everyday living tasks in the home which may inform the design of robots that will be more likely accepted by older adults.
Keywords: Older adults, Assistive robotics, Activities of daily living, Robot acceptance
1 Introduction
In many parts of the world, the older adult population is growing at an unprecedented rate. In fact, it is estimated that almost 20 % of the U.S. population will be over age 65 in 2030 [1]. Normal aging is associated with cognitive, motor, and perceptual changes that impact one's ability to perform daily activities. Thus, of the millions of adults over 65 years of age worldwide, even the most healthy and independent may still benefit from some types of assistance as a result of limitations associated with normal aging. Moreover, nearly 40 % of Americans over 65 report having a severe disability (e.g., hearing, vision, cognition, ambulation, self-care) and this percentage rises to 56 % for Americans over 80 years [1]. In this paper, we focus on older Americans' attitudes and preferences for robot assistance in the home to identify the potential for domestic robots.
1.1 Age-Related Challenges to Living Independently
As Americans age, many want to remain as independent as possible while remaining in their homes [2], whether that be a single family home, an apartment, or in a senior living community. To lead independent and healthy lives in their own homes, people must be able to perform a wide range of tasks related to activities of daily living including self-maintenance, instrumental, and enhanced activities of daily living [3, 4]. Self-maintenance activities of daily living (ADLs) are essential to maintaining one's independence and include the ability to toilet, feed, dress, groom, bathe, and ambulate. Instrumental activities of daily living (IADLs) are usually more cognitively demanding than ADLs. They include the ability to successfully use the telephone, shop, prepare food, do the housekeeping and laundry, manage medications and finances, and use transportation. Enhanced activities of daily living (EADLs) include participation in social and enriching activities, such as learning new skills and engaging in hobbies [4].
Age-related declines in physical, perceptual, and cognitive abilities can make performing these tasks challenging for older adults. Physical limitations such as motor impairment and difficulty balancing were identified as the source of nearly 40 % of the difficulties in performing tasks of everyday living mentioned by community-dwelling older adults [4]. Such impairments can limit the performance of ADLs (e.g., ambulation, grooming), IADLs (e.g., housekeeping, meal preparation), and EADLs (e.g., hobbies) [5, 6]. Consequently, older adults could benefit greatly from assistance with physically demanding tasks.
Perceptual declines in vision and hearing are common among older adults and tend to worsen with age [7, 8]. Older adults report difficulty performing ADLs (e.g., dressing), IADLs (e.g., hearing the telephone, driving), and EADLs (e.g., sewing) due to vision or hearing impairments [4, 9].
Cognitive declines, such as memory loss, could also negatively impact older adults' abilities to perform IADLs (e.g., transportation, medication management) and EADLs (e.g., learning something new) [4, 6, 9, 10]. Even activities that are less cognitively demanding, can be negatively affected by age-related memory limitations (e.g., burning pots while cooking, remembering where items are stored) [4].
These needs for assistance can be met in an individual's private home by informal and formal caregivers, or by moving to a facility that provides personal and medical care, such as an assisted living or skilled nursing facility [11]. However, in many instances these options are not possible or ideal. For instance, in the United States approximately 30 % of adults 65 and older live alone in a private home [12]. Moreover, almost half of the older adults in the U.S. who do not live alone live with a spouse [13] who may not be able to provide assistance and may have his or her own needs for assistance as well.
Formal (i.e., professionals paid to care for patients) and informal caregivers (i.e., people who care for patients without pay) provide assistance to 28.4 % of Americans over 65 with disabilities who live in the community [14]. However, the caregiving they provide is contingent on financial resources and/or Medicaid and Medicare allotments. Furthermore, assisted living and skilled nursing facilities may not be optimal given older adults' preference for staying in their own homes [2]. Moreover, long-term care facilities can negatively impact feelings of autonomy, an effect that is associated with mental and physical declines (e.g., [15]).
1.2 How Older Adults Address Age-Related Challenges
The Selection, Optimization, and Compensation (SOC) model of successful aging describes strategies that individuals, including older adults, engage in to address challenges encountered as they age [16]. The SOC model highlights the importance of considering older adults' preferences for assistance in addition to their needs.
This model conceptualizes three strategies older adults take when addressing age-related challenges: selection, optimization, and compensation. First, selection refers to two processes: (a) elective selection which involves choosing the goals an individual wants to pursue from all possible options; and (b) loss-based selection which involves the pruning of goals an individual can no longer complete. Second, optimization refers to the allocation of resources to continue performing tasks at a similar level. Third, compensation refers to use of new processes to continue performing tasks at a similar level. Of note, the use of one strategy does not preclude the use of another strategy.
The strategy chosen by an individual may vary depending on the task [5]. For example, Mrs. Smith may have several options to how she responds to her motor limitations. She could select a subset of tasks to perform herself (e.g., gardening for a limited time each day), optimize her ability (e.g., weeding when she is not tired), or compensate (e.g., hiring someone else to garden for her).
The SOC model can be applied as a starting point to understand the potential of domestic robots for older adults. Robot assistance might be a way for older adults to select, optimize, or compensate for age-related deficits. For instance, a robot could suggest to Mrs. Smith that gardening is a good activity at a particular time because the weather is really nice (selection). To address the challenges of gardening, she could only grows plants that her robot researched as growing well in her region or that require less watering (optimization), and she could have a robot carry heavy bags of soil (compensation).
1.3 Robots Have the Potential to Provide Assistance
Technology, such as robots, may be able to provide support for older adults with the difficulties and challenges associated with aging. Robots, particularly, human-sized mobile manipulators, have great potential for providing assistance to older adults in their own homes. Mobile manipulators are robots capable of manipulating the world with the potential to provide physical assistance to diverse users with a wide variety of tasks. These capabilities are well-suited for providing support for a wide range of activities in a home environment. Because of their range of capabilities, mobile manipulators are a good candidate for supporting older adults in maintaining independence longer at home. Such robots have the potential to assist older adults by supporting the selection, optimization, and compensation of tasks. For instance, a mobile manipulator could assist with difficult aspects of a task (e.g., lifting a mattress), allowing the person to continue to do as much of the task that he or she can independently perform (e.g., tucking a sheet under a mattress).
Presently, little is known about older adults' preferences for robot assistance in their homes, including tasks. Attitudes, such as preferences for assistance, are a predictor to accepting robots [17]. Acceptance is critical to understand, because it increases the likelihood that people will utilize robot assistance. As a result, we studied older adults' attitudes and preferences for robot assistance in this research. By understanding older adults' attitudes and acceptance for robot assistance, we can design robot capabilities and interactions between robots and older adults to serve human needs.
1.4 Older Adults' Acceptance of Robots
There has been rather limited research on older adults' acceptance of robots. Some evidence that their attitudes may be generally positive comes from a survey conducted by Ezer and her colleagues [18, 19]. They found that older adults were no less willing than younger adults to have robot assistance with tasks [18, 19]. They reported positive attitudes toward intention to accept robots [18]. Understanding older adults' acceptance is also informed by theoretical frameworks that outline the important factors influencing acceptance. Two of the most applicable robot acceptance frameworks for understanding older adults' acceptance of robot assistance in the home are the Domestic Robot Ecology (DRE) and the Almere Model. These models provide general insights about older adults' acceptance and informed the present study.
1.4.1 Domestic Robot Ecology (DRE)
The DRE is an acceptance framework that emphasizes the dynamic relationships that occur between domestic robots and their environment—including humans—over time [20]. Sung and colleagues [20] found that in the U.S. the physical and social space, social actors, and intended tasks impacted these robot-environment relationships over six months. The context of the physical (indoor environment including floors, furniture) and social environment (the lifestyle and activities of a family) impacts the interactions between humans and robots [20]. The environment not only impacts the robot, but the robot can impact the physical and social environment. For example, people may move furniture to ensure more optimal robot use or they may share stories and photos of their experiences with robots with friends. Also impacting interactions with robots are social actors who are the individuals and pets living in the home. Different social actors may interact in different ways and in different frequencies with a robot. Lastly, tasks performed in the home may be changed by the introduction of the robot into the household as well as new tasks may be added that did not exist before. For instance, using a robotic vacuum cleaner required users to decrease clutter on the floor more often so it can operate effectively in that area or introduce the new task of cleaning the robot.
Although some older adults (up to 67 years old) were included in the field study that served as this framework's foundation, they were not the main focus. Thus, generalization of this framework to older adults has yet to be investigated. Additionally, the DRE is somewhat restricted by the robotic platform, because it was based on human interaction with the Roomba, a robot that performs the single task of vacuuming. In fact, Sung et al. [20] projected that interactions with a more advanced domestic robot (e.g., a robot that performs multiple tasks) would be different than those interactions described in their framework. They suggested that advanced robots would likely be able to interact with intelligent appliances in the home, be perceived as more of a social actor than a tool, and lessen the amount of home modification users perform to enhance the robot's task performance.
1.4.2 Almere Model
The Almere Model is an acceptance model adapted from the Unified Theory of Acceptance and Use of Technology (UTAUT) [17]. Heerink and colleagues [17] extended the UTAUT to the acceptance of assistive social agents by older adults in the Netherlands. Attitudes toward using robots as well as perceptions of usefulness, ease of use, enjoyment and social influence were found to significantly influence older adults' intentions to use an assistive social agent. For example, when older adults perceived an agent as more useful, they had a greater intention to use that agent. Perceptions of adaptivity, sociability and social presence as well as one's anxiety level also impacted intention to use but were mediated by the aforementioned factors. Interestingly, trust did not directly impact intention to use an agent; it impacted perceived sociability (for more details [17]).
Unlike the DRE, the Almere Model specifically targeted older adults as a user population and was based on short interactions with three different agents performing non-physical tasks (e.g., reminders, obtaining weather forecasts, assisting with online purchases) [17]. The only embodied agent that older adults interacted with was a stationary desktop robot, the Philips iCat. A video of the mobile manipulator RoboCare and the virtual agent Steffie were also used to investigate older adults' acceptance of robots.
Attitudes were found to significantly impact intention to use a socially assistive agent for a non-physical task in the Almere Model [17]. However, it remains an open question how user characteristics and situation impact these attitudes, given that person-related (e.g., sex, education) and task-related factors (e.g., task domain, criticality) have yet to be incorporated in this model.
Both the DRE and the Almere Model are high level acceptance frameworks, which may be due to the early state of this emerging research area. The DRE [20] takes a holistic approach to describing trends and relationships that emerge over time between the Roomba and its environment, including people. The DRE could benefit from a way to measure these trends and relationships with a more succinct and objective quantitative assessment that applies to a variety of domestic robots. In contrast, the Almere Model [17] has a very succinct, self-report quantitative measure of older adults' acceptance that applies to several assistive social agents. However, it could benefit from considering the situation in which human-robot interactions take place, such as the task to be performed and the user's characteristics. In the current study, we added to the existing research by investigating American older adults' preferences for assistance from a robot relative to assistance from a human with physical and non-physical tasks in the home.
1.5 What Tasks Do Older Adults Want Robot Assistance with?
To refine models of technology acceptance and develop robots that are more likely to be accepted, we must understand the tasks for which older adults would need and want robot assistance. Robots should match a person's needs and abilities [21–24]. Older adults may have different needs and capabilities than younger adults and could potentially benefit from different types of robotic assistance. Evidence is mixed whether there are significant age-related differences in what tasks people want robots to perform [18, 19, 25, 26].
Many studies have included a wide range of ages, including older adults, when asking about tasks for a robot [24– 30]. However, the detailed results reported in these studies are aggregated across age groups and thus, older adults' responses cannot be evaluated separately.
Other research specifically reported older adults' data separately [18, 19, 31–33]. These five studies aimed to determine what tasks the older adults were willing to accept assistance from a robot. For an imagined domestic robot, older adults in the U.S. reported a greater willingness for robots to perform infrequent, but important, tasks requiring little human-robot interaction (e.g., warning of danger in the home) versus service tasks requiring more interaction (e.g., bringing objects from another room, preparing a meal) [19]. Older adults reported being least willing to have a robot perform tasks that are not critical but require extensive human-robot interaction (e.g., have a conversation with the robot). Moreover, Ezer and colleagues [18] found that older adults most preferred a robot to have performance-oriented traits (e.g., efficient, reliable, helpful) over socially-oriented traits (e.g., playful, friendly). The older adults least preferred a robot to have non-productive traits (e.g., wasteful, chaotic) [18].
Two studies were conducted with older adults in a New Zealand retirement community that included a range of capabilities from self-care to more skilled care (e.g., dementia unit, hospital) [31]. In Study 1, seven older adults discussed tasks that a robot could help with in the community in a focus group (e.g., lifting objects and people; reminding people to take medications and of daily appointments). In Study 2, 32 older adults used a predetermined list of 30 tasks to rate a healthcare robot as most useful for detecting falls and calling for help, lifting heavy objects, reminding, housework, and mobility assistance. In contrast, they rated a healthcare robot as least useful for highly personal tasks with a lot of interaction between a robot and human (e.g., showering, social activities). Of note, participants in Study 2 did not see or interact with a healthcare robot, but those in Study 1 were verbally asked in the focus group about preferences for the robot's appearance.
In a similar study, 64 older adults living in Germany, Spain, and Italy rated the usefulness of 25 tasks that a robot could help with inside (e.g., laundry) and outside the home (e.g., shopping, taking out the trash) [33]. Tasks were supported with static illustrations and pictures of robots and humans. These older adults were living at home but were experiencing difficulties with IADLs. Older adults rated emergency assistance (e.g., help after a fall), reaching for objects, and reading small text as the most useful tasks. In contrast, social (e.g., companionship, playing board games) and more personal tasks (e.g., bathing) were rated as the least useful tasks.
When referring to a humanoid robot sketch while responding to open ended survey questions, older adults in the United Kingdom reported they would ask their robot to mainly perform servant tasks such as housework (e.g., cleaning), food preparation (e.g., fixing breakfast), personal service (e.g., shopping), and guarding the house [32]. Older adults did not mention collaborative tasks as something they would ask a robot to do. However, question wording (e.g., “What will you ask your robot to do today?”) may have biased participants away from mentioning social or more interactive tasks, even though participants were never explicitly told that the robot worked for them [32, p. 362].
Across all five studies [18, 19, 31-33], older adults were most positive toward robot assistance with emergency situations (e.g., help with falls), lifting and reaching for objects, reminders of appointments and medications, and housework. In contrast, older adults tended to be least positive toward tasks more social (e.g., playing games, conversing) or personal in nature (e.g., bathing, showering). However, many tasks did not have a clear trend. For example, food preparation was reported as a task older adults would ask their humanoid robot to do [32] whereas it was rated one of the least useful tasks for robot assistance by older adults experiencing difficulties with IADLs [33]. Table 1 shows a summary of the current research as well as open questions for age-related challenges, robot acceptance, and tasks for robot assistance.
Table 1. Summary of background research and open questions.
| Summary of background | Open questions |
|---|---|
| Age-related challenges | |
|
|
| Robot acceptance | |
|
|
| Tasks for robot assistance | |
|
|
1.6 Goals of Research
Attitudes are important for older adults' acceptance of robots and other technology as they are indicative of technology use and intention to use [17, 34]. Despite their importance, little is known about the nature of older adults' attitudes towards robot assistance or about their preferences for robot assistance in the home. Hence, the first goal of this research was to explore the extent to which older adults were willing to accept robot assistance in their homes. We identified home-based tasks for which older adults were willing or not willing to accept robot assistance. Of note, the participants in this study lived in various types of homes, including single-family houses, condominiums, and apartments in senior living communities.
The second goal of this study was to understand older adults' preferences for robot assistance by exploring the influence of an alternative to robot assistance and task type. We investigated older adults' preferences for assistance with home-based tasks from a robot versus a human. The tasks we examined were informed by tasks that older adults report having to do to maintain their home [5] as well as by general needs of older adults.
For the third goal of this study, we explored in detail the actions older adults wanted robots to perform and the objects they wanted robots to manipulate. Knowing what actions older adults want a robot to perform with what objects can have direct implications for what range of capabilities to design into a robot.
Our goals for this publication:
Discover extent to which American older adults are willing to accept robot assistance in the home.
Determine the actions American older adults want robots to perform and the objects they want the robots to manipulate.
Understand American older adults' preferences for assistance by identifying tasks older adults were willing or not willing to accept robot assistance with in the home.
1.7 Overview of Study
To achieve our research goals, we used multiple methods with an older adult sample to ascertain both their group and individual attitudes and preferences toward a mobile manipulator. Specifically, structured group interviews and questionnaires were used. A group interview is advantageous for participants to react to one another's ideas for tasks a robot could perform by generating new tasks or rejecting suggested ones. Group interviews are especially helpful for populations, such as the participants in our study, who have limited knowledge of the topic (e.g., capabilities of robots to perform tasks in the home; see [35] for more details of the advantages of group interviews). We also assessed participants' individual preferences through questionnaires to ensure that each person's view was recorded while lessening the propensity toward socially acceptable answers.
One of our questionnaires, the Assistance Preference Checklist, used a novel approach to assess what tasks older adults are willing to have robot assistance with in the home. We did so by comparing assistance from a robot versus a human for 48 home-based tasks. Decisions in daily life involve choosing the solution out of many possibilities that works best for an individual's situation.
As the context for our study, we used a human-sized mobile manipulator that looks mechanical and has grippers instead of hands. This particular class of robot was chosen because human-sized mobile manipulators have great potential to assist people within the human environment. Mobile manipulators can move around as well as physically handle objects within said environment. Willow Garage's human-sized mobile manipulator, the Personal Robot 2 (PR2), was specifically designed to interact with humans in their environment (e.g., in the home or office setting).
Previous studies required participants to use their imaginations about robot appearance and capabilities [19, 31] or to refer to a static illustration of a robot [32, 33]. We showed a video of a PR2 performing tasks as well as demonstrating its capabilities to provide participants with a foundation of knowledge. Previous research had participants draw their own domestic robot [18, 19], did not show a robot [31], or presented static illustrations of robots [32, 33]. In our study, participants were given the same information for the same robot which provided common ground to discuss—in an informed manner—robot assistance with tasks in the home. Otherwise, participants may not have been able to generate a broad range of tasks for robot assistance.
1.8 Novel Contributions
The methodology and findings of this publication were novel in five major ways. First, this study differed methodologically from previous studies by showing a video of a robot's capabilities to participants [18, 19, 31–33]. Previous research had participants draw their own domestic robot [18, 19], did not show a robot [31], or presented static illustrations of robots [32, 33]. In related studies published in the International Journal of Social Robotics, participants interacted directly with robots (e.g., [17, 20]), which is thought to be important for acceptance [21]. We presented a video because we wanted the participants to react to a demonstration of a robot's capabilities that was clear, realistic, error-free and consistent across participants.
Second, we employed multiple methods (structured group interviews and questionnaires) with the same sample of participants to ascertain older adults' attitudes toward a diverse set of home-based tasks. Although [31] also used mixed methods, they were conducted on different samples which limits comparison. Other work used either qualitative or quantitative methodologies respectively [18, 19, 32, 33].
Third, this study used an innovative metric—the Assistance Preference Checklist—to determine preferences for robot assistance versus human assistance for 48 home-based tasks. None of the prior research enabled participants to make such direct comparisons about their preferences.
Fourth, this study targeted Americans whereas several of the previous studies with older adults targeted New Zealanders and Europeans [31–33]. Thus, the data add to the corpus of understanding older adults' attitudes.
Fifth, this study's findings not only determined the tasks older adults' were willing to have robot assistance compared with human assistance in the home, but also identified the actions that older adults want a robot to perform and the objects with which to perform those actions with. These data provide insights about the abilities that personal robots should have to support the needs of older adults.
2 Method
2.1 Participants
2.1.1 Demographics
Five structured group interviews were conducted, each comprised of two to five independently living older adults (N = 21) between the ages of 65 and 93 (M = 80.25 years; SD = 7.19 years). Participants were recruited from two different senior centers, located in areas of metro Atlanta known to differ in socioeconomic status (SES). We collected information about participants' demographics, health, and technology experience using standardized materials developed by the Center for Research and Education on Aging and Technology Enhancement (CREATE) [36].
Participants varied in their educational background (correlated with socioeconomic status), with 33.4 % having less than formal college education, 38.1 % with some college, and 28.5 % with at least some post graduate training. Participants' race/ethnicity was diverse; 57.7 % reported themselves as White/Caucasian and 42.9 % as Black/African American. Participants were widowed (42.9 %), married (28.6 %), divorced, (19 %) or single (9.5 %). Participants lived independently in an apartment in a senior community (66.7 %), in a house/apartment/condominium (28.5 %), or in a relative's home (4.8 %).
2.1.2 Health
Participants reported they were in good health (M = 3.09, SD = 0.61; where 1 = poor, 3 = good, 5 = excellent); however, they still indicated some limitations. Limitations were reported most often for walking more than a mile, for climbing several flights of stairs, for moderate activities (e.g., moving a table, pushing a vacuum cleaner, bowling, or playing golf), and for vigorous activities (e.g., running, lifting heavy objects, or participating in strenuous sports). The most prevalent chronic health conditions reported were arthritis, hypertension, diabetes, and heart disease, which is representative of chronic illness trends in the general older adult population [37].
2.1.3 Robot Experience
To assess participants' experience with robots, we administered a questionnaire measuring familiarity as well as the frequency of using 13 different types of robots (e.g., manufacturing robots, entertainment/toy robots, personal robots, surgical robots).1 Overall participants were somewhat familiar with, yet inexperienced using robots (M = 1.47, SD = 0.80; where 0 = not sure what it is; 1 = never heard about, seen or used it; 2 = have only heard about or seen this robot; 3 = have used or operated it only occasionally; 4 = have used or operated it frequently). More specifically, most participants reported having seen or heard about surgical robots (M = 1.95, SD = 0.22), robot lawn mowers (M = 1.76, SD = 0.43), space exploration robots (M = 1.76, SD = 0.62), and manufacturing robots (M = 1.67, SD = 0.80). Yet, none to very few participants reported having experience actually using any of these robots.
2.2 Personal Robot 2 (PR2)
The mobile manipulator used in this study was Willow Garage's (www.willowgarage.com) Personal Robot 2 (PR2; Fig. 1). The PR2 is a commercially available human-sized robot, with a telescoping spine allowing the robot to range in height from 130 cm to 160 cm. The PR2 has an omnidirectional wheeled base, with a footprint the size of an average wheelchair. It has two 8-degrees-of-freedom arms/grippers that permit it to manipulate objects in the environment. Its pan-tilt head carries two stereo camera pairs and a light emitting diode texture projector. The PR2 was specifically designed to interact with humans in their environments. It was used in the current study to provide participants with examples of what a mobile manipulator could potentially do in the home.
Fig. 1. A screenshot of the Willow Garage's mobile manipulator, the Personal Robot 2 (PR2), as shown in a video to participants.

2.3 Video of Mobile Manipulator
Participants were introduced to the PR2 via an 8-minute narrated video consisting of a collage of video clips. The purpose of the video was to introduce the PR2 and depict its capabilities. The video clips were a combination of clips locally developed, as well as adapted, with permission, from the Willow Garage video blog (http://www.willowgarage. com/blog). The video consisted of three chapters that explained the physical features of the PR2, its capabilities, and a range of tasks the robot could perform (Table 2). The goal was to provide a best-case scenario of the robot's capabilities; therefore, we emphasized to participants that the robot was not limited to what was shown in the video. The video used in the experiment can be viewed as supplemental material (Online Resource 1).2
Table 2. Video overview of the Personal Robot 2 (PR2) mobile manipulator. See Online Resource 1 (electronic supplementary material) for the video participants viewed.
| Video Chapter | What was shown | |
|---|---|---|

|
PR2 physical features | Layperson overview of robot's head, base, arms, and grippers |

|
PR2 capabilities | Navigation; grasping and manipulating objects; telescoping spine |

|
PR2 performing tasks | Opening a door; delivering objects; folding towels; plugging self in; playing billiards |
2.4 Robot Opinion and Assistance Preference Questionnaires
We developed a Robot Opinion Questionnaire to measure older adults' attitudinal acceptance of robots, based on standard technology acceptance scales (e.g., [34]). Participants were instructed to indicate their agreement with 12 questionnaire items about using a robot, 6 relating to the usefulness of the robot and 6 relating to the ease of using the robot (Table 4). Participants responded using a 7-point Likert-type scale (1 = Extremely unlikely, 4 = Neither unlikely or likely, 7 = Extremely likely). The questionnaire was administered both before and after the group discussion (i.e., pre and post).
Table 4. Older adults' scores pre and post group interview on the Robot Opinions Questionnaire. Participants responded using a 7-point Likert-type scale (1 = Extremely unlikely; 4 = Neither unlikely or likely; 7 = Extremely likely). The last row is the aggregate values for all 12 items on the questionnaire.
| Robots Opinion Questionnaire Item | Pre discussion | Post discussion | Z | n | p | ||
|---|---|---|---|---|---|---|---|
|
|
|
||||||
| Mdn | Range | Mdn | Range | ||||
| *My interaction with a robot would be clear and understandable. | 6 | 3–7 | 6 | 1–7 | −1.61 | 21 | .11 |
| I would find a robot useful in my daily life. | 6 | 2–7 | 5 | 1–7 | −1.67 | 21 | .10 |
| Using a robot would enhance my effectiveness in my daily life. | 5 | 3–7 | 5 | 1–7 | −1.35 | 21 | .18 |
| Using a robot in my daily life would increase my productivity. | 5 | 2–7 | 5 | 1–7 | −0.48 | 21 | .63 |
| Using a robot would make my daily life easier. | 5 | 2–7 | 5 | 1–7 | −0.27 | 21 | .79 |
| Using a robot would improve my daily life. | 5 | 2–7 | 5 | 1–7 | −0.09 | 21 | .93 |
| Using a robot in my daily life would enable me to accomplish tasks more quickly. | 5 | 2–7 | 6 | 1–7 | −0.52 | 20 | .60 |
| *I would find a robot easy to use. | 5 | 2–7 | 6 | 1–7 | −1.36 | 21 | .17 |
| *I would find a robot to be flexible for me to interact with. | 5 | 3–7 | 5 | 1–7 | −0.20 | 21 | .84 |
| *It would be easy for me to become skillful at using a robot. | 6 | 1–7 | 6 | 1–7 | −0.99 | 21 | .32 |
| *I would find it easy to get a robot to do what I want it to do. | 5 | 1–7 | 6 | 1–6 | −1.76 | 21 | .08 |
| *Learning to operate a robot would be easy for me. | 6 | 1–7 | 6 | 1–7 | −1.09 | 21 | .28 |
| Median of 12 Items | 5.5 | 1–7 | 6 | 1–7 | −0.32 | 21 | .76 |
Perceived ease of use items. The other items represent perceived usefulness. Mdn = median score. Range = the minimum and maximum Likert-type responses selected by participants. Z = Wilcoxon sign-rank test statistic. n = number of participants who responded. p = probability of type 1 error for the Wilcoxon sign-rank test
For the pre discussion Robot Opinions Questionnaire, the internal consistency reliability of the usefulness scale (Cronbach's alpha, α = .93) and ease of use scale (α = .92) were high. For the post discussion Robot Opinions Questionnaire, the internal consistency reliability of the usefulness scale (α = .96) and ease of use scale (α = .95) were also high. Reliabilities for the Robot Opinions Questionnaire scales both pre and post discussion were similar to levels reported by [34].
We also developed an Assistance Preference Checklist to assess older adults' preferences for human versus robot assistance on 48 tasks in the home (α = .97). The questionnaire was based on tasks older adults reported as important for maintaining their homes [5] and general needs of older adults. Participants were instructed to assume they needed assistance with performing these tasks and the robot could perform the tasks to the level of a human. Participants rated their preference for assistance for each task on a 5-point Likert-type scale (1 = only a human, 3 = no preference, 5 = only a robot).
2.5 Interview Script Design
The design of the interview script followed the methodology provided by Fisk and colleagues [38]. Categories of interview questions and materials were systematically developed based on the literature and pilot testing. The interview environments were selected to have few distractions and to respect the privacy of the participants. Participants were recruited according to approved Institutional Review Board guidelines. Moderators, who lead the group discussion, were well trained and practiced at systematically interviewing and administering questionnaires. For more details, see Fisk et al. [38].
2.6 Structured Group Interview Procedure
The interview groups were divided by participant sex to create a homogeneous group environment (Table 3) and to encourage open discussions [38].
Table 3. Each participant was interviewed in one of the five interview groups stratified by participant sex.
| Interview group | Participants |
|---|---|
| 1 | 5 females |
| 2 | 5 females |
| 3 | 5 females |
| 4 | 4 males |
| 5 | 2 males |
An overview of the study procedure is depicted in Fig. 2. Before the session, participants were mailed a packet that contained an informed consent, as well as demographics, health, and technology experience questionnaires. These materials were expected to be filled out before the interview. Upon arrival to the interview session, participants provided written informed consent, and completed the Robot Experience and the Robot Opinions questionnaires.
Fig. 2. Procedure for the larger study. * = Data included in current publication.
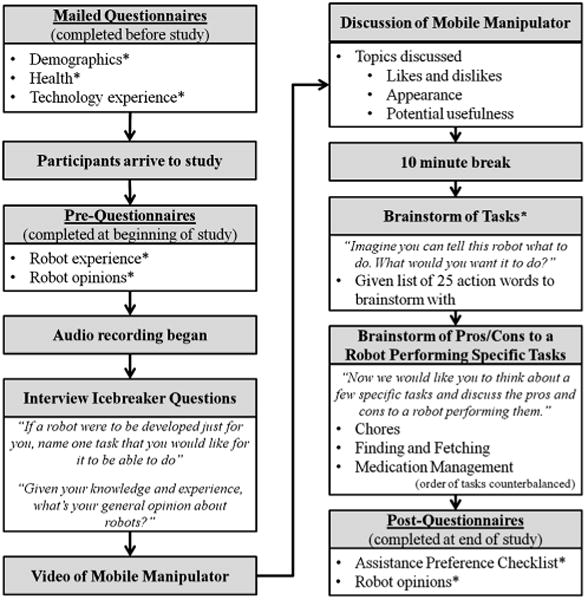
Participants were informed that the interview discussion would be digitally recorded and transcribed for analysis. The moderator outlined the goals and topic of the structured group interview, as well as the rules for the conversation (e.g., not to interrupt other participants).
The interview then followed a specific structured order so that all groups would have the same flow of discussion:
icebreaker questions
the video depicting the PR2 robot (Fig. 1; Online Resource 1)
questions about the older adults' opinions of the PR2
a brainstorm of tasks a robot may perform in the home. Pilot testing indicated that older adults had difficulties brainstorming tasks so a list of 25 action words was given to participants to facilitate the discussion (Online Resource 2).3
a brainstorm of pros/cons to a robot performing three specific tasks (i.e., medication management, finding and fetching items, and chores). These tasks were counterbalanced to mitigate potential order effects.
At the conclusion of the structured group interview, the participants completed the Assistance Preference Checklist and again, the Robot Opinions questionnaire. The digital audio recordings of the group interviews were transcribed verbatim by a professional transcription company.
3 Results
3.1 Older Adults' Acceptance of Robots
The older adult participants were generally open to accepting robots as evidenced by the median scores of the Robot Opinions Questionnaire (Table 4). The median score of all 12 questionnaire items did not change significantly from pre to post discussion (Table 4). This finding suggests that watching the video of a PR2 and discussing robots did not change the participants' average acceptance of robots. The pre and post discussion scores were both above 5.0 (5 = slightly likely; Table 4), which indicates that older adults were generally positive about accepting robot assistance in their homes.
Additional support for older adults being willing, or “slightly likely” to accept robots was found by comparing the pre and post discussion means computed for each of the 12 questionnaire items (Table 4). None of the 12 item means were significantly different from pre to post discussion (Table 4). For 8 of the 12 questionnaire items, the means for pre-discussion and post-discussion was greater than or equal to 5.0, suggesting that older adults were positive toward robot assistance. The remaining four items had means greater than 4.0 (4 = neither unlikely or likely), suggesting that older adults were open to robot assistance as they were neither greatly negative nor positive. In sum, these data support that older adults were largely positive toward or open to accepting robot assistance.
3.2 Home Tasks for Mobile Manipulators
Although the older adults in our study were generally accepting of robot assistance in the home, older adults reported preferring robot assistance for some tasks and human assistance for other tasks. This pattern is evidenced by data collected both from the structured group interview (i.e., brain-storming tasks for robot assistance) as well as the Assistance Preference Checklist questionnaire.
3.2.1 Brainstorming Tasks for Robot Assistance
Participants were instructed to brainstorm what tasks they would want robot assistance with in the home. During the group discussion, older adults reported a diverse set of home-based tasks for robotic assistance. From the transcripts of the interviews, we noted each task that older adults reported wanting robot assistance with in the home. Each task was counted only once per group interview session. Next, we grouped the tasks that were basically the same (e.g., clean the dishes, wash the dishes). The method and data analysis of the brainstorming session of the interview were chosen to elicit the range of tasks that older adults want a robot to perform in the home.
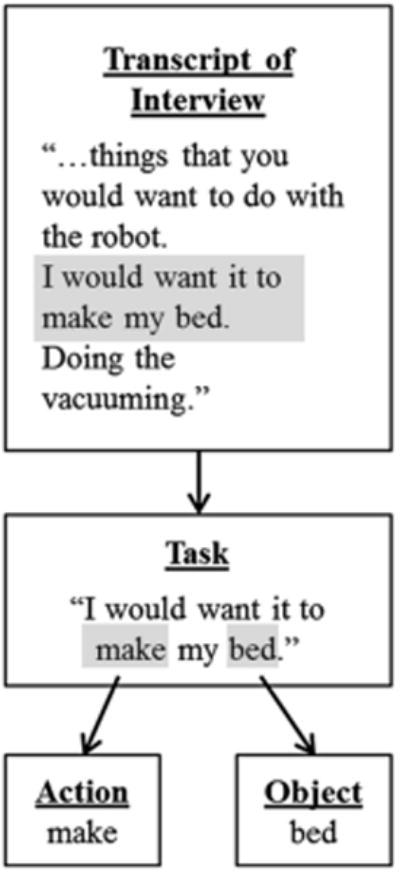
Participants brainstormed a total of 121 different tasks for robot assistance in the home. Using a method similar to [39], each task (e.g., “I would want it to make my bed.”) was decomposed into its action (e.g., make) and its object (e.g., bed; Fig. 3). The goal of decomposing the tasks was to indicate the range of actions and the range of objects that older adults reported wanting a robot to perform in their homes. If participants said they would not want a robot to do a task, then it was excluded from this analysis.
Fig. 3. Overview of procedure for identifying actions and objects from transcripts of the interviews.
Within the 121 tasks, older adults' specified 64 actions for a robot to perform in their homes (see Table 5) with 67 different objects (see Table 6). We include a subset of all the tasks participants listed during the brainstorming session because a majority of the tasks were only mentioned by one interview group. Thus, we decomposed the task into actions and objects to collapse the data to be able to talk about trends as well as the range of tasks.
Table 5. Actions that older adults report wanting a robot to perform in their homes. Each action was specified in three or more group interviews.
| Action | Example |
|---|---|
| Clean | Clean kitchen; Clean refrigerator |
| Remind | Remind medication; Remind social events |
| Straighten/organize | Straighten/organize groceries; Straighten/organize papers |
| Bring | Bring socks; Bring drink; Bring phone |
| Pick up | Pick up drink; Pick up phone |
| Select/pick | Select/pick book; Select/pick suit |
| Connect | Connect to the Internet; Connect to the television |
| Make | Make bed; Make breakfast |
| Play | Play games; Play cards |
| Walk | Walk the dog |
Table 6. Objects that older adults report wanting a robot to perform tasks with in their homes. Each object was specified in two or more group interviews.
| Object | Example |
|---|---|
| Me (person) | Pick me up; Train me; Protect me; Wake me; Get me |
| Book | Bring book; Straighten/organize books |
| Dog | Walking dog |
| Bed | Make bed |
| Clothing | Fold clothing; Straighten/organize clothing |
| Computer | Act like a computer; Connected to the computer |
| Dishes | Put up dishes; Washing dishes |
| Heavy things | Pick up heavy things; Carry heavy things |
| Door | Close the door; Open the door |
| Drink | Bring drink; Pick up drink |
The tasks were generated by the participants (not the researchers) so it is possible that one action word may have different meanings across participants and objects. For example, organize groceries and organize papers are two conceptually different tasks. In this analysis, organize would be counted as one action, and groceries and papers are two objects.
In the group discussion, older adults reported wanting robot assistance with many home-based tasks. This suggests that the older adults would be open to robot assistance with a diverse set of tasks in the home (e.g., cleaning, reminding, playing games). However, it was also important to assess the older adults' individual preferences for robot assistance with a predetermined set of home-based tasks. The Assistance Preference Checklist was used to assess older adults' individual preferences for robot assistance with tasks that are important to maintain their homes.
3.2.2 Assistance Preference Checklist
When asked to indicate their preferences for robot assistance versus human assistance for a variety of home-based tasks, older adults were selective about what tasks they preferred robot assistance. We grouped the 48 tasks on the Assistance Preference Checklist into one of four domain categories: leisure activities, personal care, health, or chores. If a task did not fit into the aforementioned four domain categories (e.g., reminding of appointments, reaching for an object), we then grouped it into one of two general categories: information management or manipulating objects. Priority was given to domain categories because they are more informative than the general categories. The categories were mutually exclusive such that each task could be in only one (i.e., 4 domains and 2 general categories). Refer to Table 7 for category definitions, examples, number of tasks and internal reliabilities, as well as the mean and standard deviation of participants' preference ratings.
Table 7. Categories organizing the 48 tasks in the Assistance Preference Checklist. The first four categories listed are based on domain whereas the latter two are general. Tasks were grouped first by domain. If a task did not fit in a domain, then it was grouped into a general category. Categories are mutually exclusive in terms of task.
| Category | Definition | Examples | Num tasks | α | M | SD |
|---|---|---|---|---|---|---|
| Personal care | Tasks performed that involve direct physical contact with a person to assist with daily needs and hygiene | Shaving, bathing, eating/feeding, walking | 7 | .81 | 2.26 | 0.96 |
| Leisure activities | Tasks performed for enjoyment | Entertainment, social activities, games, hobbies | 6 | .77 | 2.65 | 1.07 |
| Health | Tasks to maintain health and well-being without direct physical contact | Medication management, exercise, calling doctor | 5 | .73 | 2.71 | 1.14 |
| Chores | Tasks performed inside and outside of home to maintain order | Housework, yard work, cooking | 21 | .96 | 3.26 | 1.02 |
| Information management | Tasks involved in the collection, handling, and distribution of information | Reminders, monitoring home, finding information | 4 | .83 | 3.49 | 1.05 |
| Manipulating objects | Tasks performed regardless of purpose or context | Reaching or fetching objects, open/close drawers, finding items | 5 | .93 | 3.64 | 0.92 |
Num tasks = number of tasks in each category. α = Cronbach's alpha measure of internal consistency reliability for each category. M = participants' mean preference rating on a 5-point Likert-type scale (1 = only a human, 3 = no preference, 5 = only a robot). SD = standard deviation of preference ratings
Figure 4 contains the mean rating (on a scale of 1 to 5, with 1 = only a human, 3 = no preference, 5 = only a robot) for preference for human versus robot assistant for each of the 48 tasks. Within each category, the tasks are shown ordered from greatest mean preference for human assistance to greatest preference for robot assistance. Overall, participants reported preferring human assistance for the domains of personal care (e.g., shaving) followed by leisure activities (e.g., entertaining guests), and health (e.g., deciding what medication to take). In contrast, participants reported an overall preference for robot assistance with chores (e.g., cleaning kitchen) and with the general categories of information management (e.g., monitor home and warn about dangers) and manipulating objects (e.g., fetching objects) (Table 7).
Fig. 4. The older adults' mean preference ratings for robot versus human assistance by task. Within each group, tasks are arranged from preferring human assistance to preferring robot assistance. Error bars represent standard error of the mean.
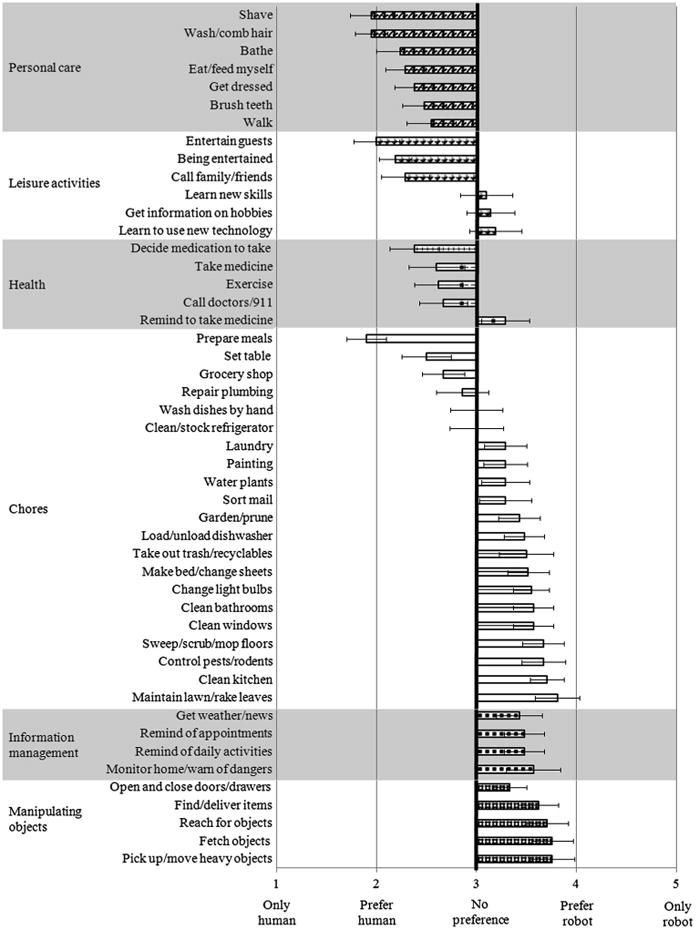
To determine if older adults had a significant preference for either robot or human assistance for each task, we performed one-sample Wilcoxon sign-rank tests to compare each task median against 3.00, where 3.00 = no preference. See Tables 8 and 9 for the tasks that older adults reported either a significant preference for robot assistance or for human assistance compared to no preference at all.
Table 8. Tasks for which older adults significantly preferred robot assistance compared to no preference. Fifteen tasks were significant at the p < .05 level but after controlling for Type 1 error using a Bonferroni correction, no tasks were significant at the p < .001 level.
| Task | M | SD | Mdn | Range | n | p |
|---|---|---|---|---|---|---|
| Maintaining lawn/raking leaves | 3.81 | 1.03 | 4 | 1–5 | 21 | .006 |
| Picking up/moving heavy objects (e.g., furniture) | 3.76 | 1.00 | 4 | 1–5 | 21 | .006 |
| Fetching objects from floor (e.g., remote control) or other room (e.g., drink from refrigerator) | 3.76 | 0.94 | 4 | 1–5 | 21 | .006 |
| Cleaning kitchen | 3.71 | 0.78 | 4 | 1–5 | 21 | .002 |
| Reaching for objects | 3.71 | 0.96 | 4 | 1–5 | 21 | .007 |
| Sweeping/scrubbing/mopping | 3.67 | 0.97 | 4 | 1–5 | 21 | .009 |
| Controlling for pests/rodents | 3.67 | 1.02 | 4 | 1–5 | 21 | .013 |
| Finding/delivering items (e.g., car keys, glasses) | 3.62 | 0.92 | 4 | 1–5 | 21 | .011 |
| Cleaning bathrooms | 3.57 | 0.93 | 4 | 1–5 | 21 | .015 |
| Cleaning windows | 3.57 | 0.93 | 4 | 1–5 | 21 | .015 |
| Changing light bulbs | 3.55 | 0.83 | 4 | 1–5 | 20 | .013 |
| Making bed/changing sheets | 3.52 | 0.98 | 4 | 1–5 | 21 | .031 |
| Being reminded of appointments | 3.48 | 0.93 | 4 | 1–5 | 21 | .039 |
| Loading/unloading dishwasher | 3.48 | 0.93 | 4 | 1–5 | 21 | .035 |
| Being reminded of daily | 3.48 | 0.93 | 4 | 1–5 | 21 | .039 |
| activities |
M = participants' mean preference rating on a 5-point Likert-type scale (1 = only a human, 3 = no preference, 5 = only a robot). SD = standard deviation of preference ratings. Mdn = participants' median preference rating on a 5-point Likert-type scale. Range = the minimum and maximum Likert-type responses selected by participants. n = number of participants who rated a task. p = probability of type 1 error for a one-sample Wilcoxon sign-rank test comparing each task median to no preference (= 3)
Table 9. Tasks for which older adults significantly preferred human assistance compared with no preference. Eleven tasks were significant at the p < .05 level but after controlling for Type 1 error using a Bonferroni correction, one task was significant at the p < .001 level.
| Task | M | SD | Mdn | Range | n | p |
|---|---|---|---|---|---|---|
| Preparing meals/cooking | 1.90 | 0.91 | 2 | 1–4 | 20 | .001 |
| Shaving | 1.95 | 0.91 | 2 | 1–3 | 19 | .001 |
| Washing/combing hair | 1.95 | 0.74 | 2 | 1–4 | 21 | <.001 |
| Entertaining guests | 2.00 | 1.05 | 2 | 1–4 | 21 | .001 |
| Being entertained (e.g., playing games, dancing) | 2.19 | 0.75 | 2 | 1–4 | 21 | .001 |
| Bathing | 2.24 | 1.09 | 2 | 1–4 | 21 | .007 |
| Eating/feeding myself | 2.29 | 0.90 | 2 | 1–4 | 21 | .005 |
| Calling family/friends | 2.29 | 1.10 | 2 | 1–4 | 21 | .010 |
| Deciding what medication to take | 2.38 | 1.16 | 2 | 1–4 | 21 | .025 |
| Getting dressed | 2.38 | 0.92 | 2 | 1–4 | 21 | .009 |
| Brushing teeth | 2.48 | 1.03 | 2 | 1–4 | 21 | .032 |
M = participants' mean preference rating on a 5-point Likert-type scale (1 = only a human, 3 = no preference, 5 = only a robot). SD = standard deviation of preference ratings. Mdn = participants' median preference rating on a 5-point Likert-type scale. Range = the minimum and maximum Likert-type responses selected by participants. n = number of participants who rated a task. p = probability of type 1 error for a one-sample Wilcoxon sign-rank test comparing each task median to no preference (= 3)
As illustrated in Table 8, the older adults preferred robot assistance over human assistance for the categories of tasks (as described Table 7) related to chores, manipulating objects, and information management. Even for the task older adults reported the most extreme preference for robot assistance, there were individual differences (Fig. 5). They reported the most extreme preference for robot assistance (M = 3.81) for the chore of maintaining the lawn/raking leaves out of all 48 tasks (Table 8). However, even though many reported wanting robot assistance, not all older adults did (Fig. 5). Two older adults indicated that they preferred or wanted only human assistance with maintaining their lawn/raking leaves, whereas 15 older adults preferred or wanted only robot assistance.
Fig. 5. Frequency of older adults' preferences for assistance with maintaining the lawn and raking leaves.

In contrast, older adults preferred human assistance with tasks mainly related to personal care and leisure activities (Table 9). And again, even for the task older adults reported the most extreme preference, individuals varied in their preferences (Fig. 6). They had the most extreme preference for human assistance (M = 1.90) for preparing meals and cooking out of all 48 tasks (Table 9). However, not all older adults reported wanting human assistance with this task (Fig. 6). Two older adults indicated preferring robot assistance with preparing meals, whereas 17 older adults preferred or wanted only human assistance.
Fig. 6. Frequency of older adults' preferences for assistance with preparing meals and cooking.

3.2.3 Synthesis of Home Tasks for Mobile Manipulators
The older adults we interviewed reported being open to robot assistance with home tasks as indicated by the results of the brainstorming session and the Assistance Preference Checklist. The brainstorming session was during the group interview whereas the Assistance Preference Checklist was administered after the interview. As such, participants were naïve to the tasks on the Assistance Preference Checklist while brainstorming tasks.
Of the 121 tasks brainstormed during the group interviews, 45.5 % of the tasks were not on the Assistance Preference Checklist, 19.6 % of the tasks matched tasks on the checklist, 22.3 % were more specific than the checklist (e.g., bring me socks vs. fetch objects from floor or other room), and 12.5 % were more general than the checklist (e.g., call help vs. call doctor). All the tasks that older adults significantly preferred robot assistance on the checklist (Table 8) were mentioned during the brainstorming session except for maintaining the lawn/raking leaves. Six tasks of 11 that older adults' significantly preferred human assistance (Table 9) were not mentioned during the brainstorming session of any of the group interviews.
4 Discussion
Caregivers or facilities may not be able to keep pace with the increasing need for assistance engendered by the increasing number of older adults in the United States. Robots, particularly human-sized mobile manipulators, have great potential for assisting older adults with everyday tasks and may enable older adults to live independently at home. However, little is known about what tasks older adults are willing to accept robot assistance with in the home. The older adults in our study were generally open to robot assistance in the home but were selective in their acceptance of tasks. They reported wanting a robot to perform a wide range of tasks using a diverse set of actions and objects in the home (Tables 5 and 6). They also reported a preference for robot assistance over human assistance for tasks related to chores, manipulating objects, and information management whereas they were less immediately open to robotic assistance for personal care and leisure activities (Table 7). Our study provides insights into older adults' attitudes and preferences for robot assistance with home-based tasks; these data may inform the design of robots that are more likely to be accepted by older adults.
4.1 Actions for Robots to Perform
During the group discussion, older adults reported a diverse set of home-based tasks for robotic assistance. They reported many different interactions between the robot's action and an object. Oftentimes the same actions were referred to but with different objects. For example, older adults mentioned they would like a robot to straighten/organize a variety of objects in their homes including books, clothing, groceries, and papers (Fig. 7). These data give insight into how older adults think about tasks that robots could assist with in the home. Additionally, a robot may be programmed to have a core set of programs or behaviors that could be generalized to different object types.
Fig. 7. Older adults specified they wanted robotic assistance straightening/organizing their apartments, books, clothing, groceries, papers, and shelves.

Conversely, older adults also mentioned several actions to be performed with the same object. For example, they discussed having a robot help with waking “me”, protecting “me”, or even picking “me” up (Fig. 8). If people or certain objects are desired for the robot to perform several actions with, then designers could prioritize the study of properties of these objects to better program the robot's ability to interact with such objects. Also, a robot may be programmed to use similar code to implement different tasks with the same objects which may influence human-robot interaction.
Fig. 8. Older adults specified they wanted robotic assistance with picking “me” up, training “me”, waking “me”, and protecting “me”.

The participants in our study tended to speak about tasks at a higher level (e.g., straighten/organize apartment) rather than at the lower level of capabilities required for a task (e.g., grasping paper). They were not constrained by the list of action words provided to them to facilitate the discussion of tasks. They did not use all the action words that were provided (i.e., they used 17 of 25 given action words) and they generated words that were not provided (i.e., they generated 47 new action words). See Online Resource 2 for the list of 25 given action words.
These data offer insight into older adult acceptance for mobile manipulators. The older adult participants were surprisingly imaginative regarding what the robot could do to assist them. They devoted a lot of discussion to this topic, and generated action words beyond what was provided to them. They were engaged, active, and motivated to discuss robots. Thus, older adults are an important resource to evaluate designs or to guide ideation. With regard to acceptance, these data support that older adults are open to robots performing a wide range of home-based tasks.
4.2 Preference for Assistance—Robot or Human?
The older adults preferred robot assistance over human assistance for tasks related to chores, manipulating objects, and information management (Table 7). These findings are consistent with the literature where older adults rated chores (e.g., housework), manipulating objects (e.g., lifting heavy objects) and information management tasks (e.g., reminding, monitoring a person and transmitting information for help if the person falls) as useful tasks for a healthcare robot to perform [31]. For a domestic robot, older adults mentioned they would want a domestic robot to perform chores (e.g., housework, food preparation, shopping) and information management (e.g., guarding the house) [32].
Furthermore, older adults in our study preferred human assistance over robot assistance for tasks related to personal care and leisure activities. Although previous research has not directly compared human assistance to robot assistance, these findings are consistent with the literature where older adults rated tasks that are social (e.g., playing board games) or highly personal (e.g., bathing) as least useful for a healthcare [31] or domestic robot to perform [33]. For a domestic robot, older adults were less open to having a domestic robot perform tasks that required extensive human-robot interaction (e.g., having a conversation) either by report [19] or by not mentioning such tasks during a free response paradigm [32].
Task preferences may not generalize to older adults who currently need assistance with ADLs, IADLs, or EADLs, because the older adults in our study lived independently and did not currently need assistance. Healthy, independent older adults may want or require assistance with different tasks than older adults who need assistance with ADLs, IADLs, or EADLs. For example, persons with physical disabilities reported wanting robot assistance with tasks that require closer proximity with the user (e.g., lighting cigarettes, holding drink with straw to person's lips) than adults without physical disabilities [24].
We grouped the tasks in this study into domains and general categories for generalizing purposes. However, older adults were selective about tasks, even within a category. For example, older adults' responses regarding tasks in the health domain were mixed in terms of preferring human assistance to robot assistance. Participants tended to prefer robot assistance with reminding to take their medication, whereas they preferred human assistance with deciding what medication to take (Fig. 4; Table 9). Thus, for even highly related tasks, such as medication management, older adults were discriminating. Lastly, not all older adults had the same preferences (Figs. 5 and 6). Given the selectivity of older adults, generalization of their preferences for assistance should be made carefully. Robot designers should vet tasks with the intended user group to help determine users' preferences for assistance.
Little is known why older adults hold such preferences of robot assistance with home tasks. One explanation could be that older adults expect a robot to be more like an assistant or an appliance rather than a companion or friend [19, 25]. Thus, older adults' expectations of typical tasks that a robot performs are based on the robot's role. For example, a dishwasher is expected to clean, whereas a friend is expected to communicate socially.
Another potential explanation is that the older adults were accepting of robot assistance for tasks when they perceived a benefit to such assistance [19]. Using different data from this study, Beer and colleagues [40] found that older adults reported five categories of benefits of robotic assistance with chores, and fetching and finding objects around the home: a robot could compensate for their difficulties (i.e., robot performs a difficult aspect of task, or a task that the older adult can no longer perform); save them time; perform undesirable tasks; save them effort; and perform tasks well without getting tired [40]. Yet, older adults' acceptance of robotic assistance is multifaceted and depends on many factors, including concerns [31]. Older adults reported five categories of concerns with robot assistance regarding chores; fetching and finding objects around the home; damage to the environment; over-reliance on the robot (i.e., older adults would rather do a task themselves or avoid depending on the robot too much); unsure of robot's capabilities (i.e., older adults' perceptions of the robot's capabilities are limited so they assume a robot is not capable of doing a task); perform a task incorrectly; and limitations of space and storage (i.e., the robot's size makes it difficult to be in the home) [40]. Future research should further investigate the reasons why older adults hold certain preferences for certain tasks. In addition, attitudes and preferences need to be assessed following direct interactions with robots as well as over an extended time period.
4.3 Robot Support
Maintaining one's independence at home is a goal of older adults [2] but is often challenged by age-related declines in physical, perceptual, and cognitive capabilities. Such limitations tend to become more prevalent as people age [38]. According to the SOC model, successful aging is a process involving the selection of personal goals, the optimization of time or energy to those selected goals, and the compensation for loss of an ability [16]. Robotic assistance may be one way for older adults to select, optimize, or compensate for age-related deficits.4 Based on the older adult's needs and preferences, robot assistance could be tailored to that individual. For example, the older adults preferred human assistance over robot assistance with cooking a meal. Some older adults may choose to cook their own meals because they enjoy it even though many aspects are difficult for them. A robot could help assist the older adult by offering suggestions for new recipes (select), or healthier versions of favorite foods (optimize) while the older adult is cooking. Also, a robot could physically assist (compensate) the older adult by lifting a heavy bowl while he or she is cooking. If the older adult prefers to cook without robot assistance, then the robot could help only when asked instead of proactively assisting the older adult.
There is definite potential for robots to support older adults later in life because older adults will most likely need more assistance as they age. Robots would need to adapt with the individual, his or her needs, and the environment [17, 21, 22]. We posit that older adults could benefit from earlier assimilation of robots into their lives, because age-related declines may make learning how to use a robot more difficult. As such, it may prove to be more difficult to customize or train a robot to users' needs as they age. This may affect the amount of robot support for certain tasks, as well as the older adult's preferences for how a task is performed. It is also likely that people may prefer to use a robot and have the chance to develop trust in it before they have to rely on it to perform tasks critical for their independence. Over-reliance on robot assistance for home tasks is a concern that older adults have reported [40]. Finally, there may be safety reasons to consider.
In this study, we presented older adults with a video of a mobile manipulator that has the potential to perform multiple tasks around the home. They generated over 60 actions that the robot could perform with over 60 objects around the home. Many of these tasks require the robot to be able to manipulate and lift heavy objects. This information can inform roboticists to design robots that are able to perform the actions older adults mentioned (e.g., clean, pick up) with the corresponding objects (e.g., “me”, clothing, books) [40]. Alternatively, one could design and make available several single-purpose robots that perform the same tasks as one multi-purpose robot. Such single-purpose robots may be individually cheaper and smaller than a multi-purpose robot. Also, older adults could select which single-purpose robot would fit their needs and acquire more single-purpose robots as their needs change.
4.4 Methodological Strengths and Caveats
Although some argue that video trials are a useful methodology for assessing human-robot interaction (e.g., [17, 41]), future research should have older adults interact directly with robots and for longer periods of time. Many studies in this area have participants interact or observe a robot only long enough to ascertain their initial thoughts or attitudes (for exception see [20]). It would be ideal to go beyond measuring initial thoughts of robots to determine if and how attitudes or preferences change over time.
A video of a human sized mobile manipulator was used in this study because this robot was designed to interact with humans within their environment. Additionally, mobile manipulators have several useful capabilities, such as being able to move about the human environment as well as manipulate objects within this environment, for assisting people with home-based tasks. However, the generalization of the findings may not extend to other types of robots or even to other mobile manipulators. Yet, older adults' discrimination of tasks appropriate for robotic assistance was quite similar across different real or imagined robotic platforms (i.e., healthcare robot, imagined domestic robot, humanoid domestic robot sketch) [19, 31, 32]. More research is needed to determine if these trends are the same for other types of robots as well as for other mobile manipulators.
We employed structured group interviews in this study because of their many advantages. In particular, group interviews involve interaction among their participants, which facilitates the generation of new ideas [35]. This interaction is especially beneficial when participants have little to no experience or knowledge of a topic, which was the case with our participants. However, group interviews have known disadvantages [35], such as one person dominating the discussion and individual opinions not being expressed. To mitigate these issues, the moderators were well trained and the script was designed carefully. To keep a person from dominating the discussion, the moderators used subtle strategies (e.g., decreased eye contact, walking to another part of the room). To ensure that everyone in the group talked, there were periodic questions in the script that asked each person to generate a response in turn. Also, the moderators were trained to pay attention to when someone was quiet and would encourage discussion from the person by walking close to him or her, increasing eye contact, and verbal comments (e.g., “This side of room has been quiet. Does anyone have anything to add?”). Moreover, participants were encouraged and reminded that there were no right or wrong answers and to speak up if anyone had a differing opinion. Finally, the questionnaires were completed individually so at the very least participants had the opportunity to express their opinions. For more details of the advantages and disadvantages of group interviews, see [35].
Generalization of this study's findings may be limited to older adults similar to our sample, who reported some knowledge of robots but had not used them. To be able to generalize to more populations, future research should include larger scale questionnaire studies. The preferences reported in this study may be based on inexperience or misconceptions of what robots can and cannot do (e.g., a robot cannot touch water) [21, 40]. Technology experience or knowledge is important for users' perceptions of usefulness and ease of use, as well as users' acceptance of robots [19, 21]. In fact, a domestic robot was perceived as easier to use and more useful when people had more experience with technology, as compared to people with less experience with technology [19].
5 Conclusion
The number of older adults is increasing, and resources to assist them cannot keep pace with the increasing need for assistance. Robots could potentially help bridge the gap in assistance. In particular, mobile manipulators could provide this assistance within the human environment and help older adults maintain their independence longer in their homes. However, knowledge pertaining to what tasks older adults are willing to accept robot assistance with is limited. Our findings suggest that older adults are largely open to robot assistance in the home, but quite discriminating in their acceptance of tasks. During the group interview, they reported 121 different tasks they would want a robot to perform in the home. In the context of the questionnaires, older adults' reported a preference for robot assistance compared to human assistance for chores, manipulating objects, and information management (Table 7). In contrast, the older adults' preferred human assistance compared to robot assistance for personal care and leisure activities. Our results advance understanding of older adults' attitudes and preferences for robot assistance with everyday living tasks in the home which may inform the design of robots more likely to be accepted by older adults. Future research should investigate why older adults hold such preferences for assistance in the home as well as how older adults interact with a physical robot and how/if attitudes change over time.
Supplementary Material
Acknowledgments
This research was supported in part by a grant from the National Institutes of Health (National Institute on Aging) Grant P01 AG17211 under the auspices of the Center for Research and Education on Aging and Technology Enhancement (CREATE; www.create-center.org). Also, we gratefully acknowledge support provided for this work by the National Science Foundation (NSF) Graduate Research Fellowship Program, and NSF grants CBET-0932592, CNS-0958545, and ITS-1150157. This multidisciplinary effort between the Human Factors and Aging Laboratory (www.hfaging.org) and the Healthcare Robotics Laboratory (www.healthcare-robotics.com) was inspired by collaboration with Willow Garage who selected the Georgia Institute of Technology as a beta PR2 site for research (www.willowgarage.com). Video clips used in the PR2 video were adapted with permission from Willow Garage's video library (www.willowgarage.com/blog). Special thanks to Nachiketas Iyyengar for video development and Jennifer Megan Springman for assistance in data collection and creating experimental materials. Portions of data from this research study have been presented previously [40, 42].
Abbreviations
- ADLs
Self-Maintenance Activities of Daily Living
- IADLs
Instrumental Activities of Daily Living
- EADLs
Enhanced Activities of Daily Living
- PR2
Personal Robot 2
- M
Mean
- SD
Standard Deviation
- DRE
Domestic Robot Ecology
- t
t-test value
- df
degrees of statistical freedom
- p
probability of type 1 error in a statistical test
Biographies
Cory-Ann Smarr is an Engineering Psychology Ph.D. student at the Georgia Institute of Technology. She earned a B.S. in psychology at West Virginia University in 2007, and a M.S. in Engineering Psychology from Georgia Tech in 2011. Her research interests include human-robot interaction, assistive robots, acceptance, human factors, and aging.
Tracy L. Mitzner is a Senior Research Scientist at the Georgia Institute of Technology in Atlanta, Georgia. She is the Associate Director of the Human Factors and Aging Laboratory (www.hfaging.org), funded by NIH (National Institute on Aging) through the Center for Research and Education on Aging and Technology Enhancement (CREATE, www.create-center.org). Dr. Mitzner's research primarily focuses on understanding age-related changes and the potential of technology to support older adults, as well as those who provide support for older adults (e.g., caregivers).
Jenay M. Beer is an Engineering Psychology Ph.D. student at the Georgia Institute of Technology. She earned a B.A. in psychology at the University of Dayton, Ohio in 2006, and a M.S. in Engineering Psychology from Georgia Tech in 2010. Her research interests include human-robot interaction, assistive technology, human factors, technology acceptance, and aging.
Akanksha Prakash is an Engineering Psychology Ph.D. student at the Georgia Institute of Technology. She earned a Bachelor of Technology degree in Electrical Engineering from the Indian Institute of Technology (IIT), Roorkee, India, in 2007, and a M.S. in Engineering Psychology from Georgia Tech in 2013. Her research interests include human-robot interaction, social cognition, social connectedness, and aging.
Tiffany L. Chen is a Robotics Ph.D. Student at the Georgia Institute of Technology. She earned B.S. and M.S.E. degrees in Biomedical Engineering from Johns Hopkins University in 2007 and 2008, respectively. Her research has been published in the areas of human-robot interaction, assistive and rehabilitation robotics, and surgical training.
Charles C. Kemp is an Associate Professor at the Georgia Institute of Technology in the Department of Biomedical Engineering, and has adjunct appointments in the School of Interactive Computing and the School of Electrical and Computer Engineering. He earned a doctorate in Electrical Engineering and Computer Science (2005), an MEng, and BS from MIT. In 2007, he founded the Healthcare Robotics Lab at Georgia Tech (http://healthcare-robotics.com), which focuses on mobile manipulation and human-robot interaction.
Wendy A. Rogers is Professor of Psychology and Coordinator of the Engineering Psychology Program at the Georgia Institute of Technology. Her research interests include cognitive aging, automation, skill acquisition, human-robot interaction, and technology acceptance. She is Director of the Human Factors and Aging Laboratory (www.hfaging.org), funded by NIH (National Institute on Aging) through the Center for Research and Education on Aging and Technology Enhancement (CREATE www.create-center.org). She is an active member of the Aware Home Research Initiative (http://awarehome.imtc.gatech.edu) and is Editor of the Journal of Experimental Psychology: Applied
Footnotes
Electronic supplementary material: The online version of this article (doi:10.1007/s12369-013-0220-0) contains supplementary material, which is available to authorized users.
All stimulus materials described herein are available in full from the authors.
Online Resource 1: The narrated video that introduced Willow Garage's Personal Robot 2 (PR2) to the participants. The video consisted of a collage of video clips locally developed and adapted, with permission, from the Willow Garage video blog (http://www.willowgarage.com/blog). It showed the robot's physical features, capabilities, as well as it performing a range tasks. The goal of the video was to provide a best-case scenario of the PR2's capabilities and we emphasized to participants that the robot was not limited to what was shown in the video.
Online Resource 2 (see electronic supplementary material): The 25 action words given to older adults during the group interview to facilitate discussion of what tasks they would want robot assistance with in their homes
The use of one strategy (selection, optimization, compensation) does not preclude the use of another strategy in the SOC Model
Contributor Information
Cory-Ann Smarr, Email: cory-ann.smarr@gatech.edu, School of Psychology, Georgia Institute of Technology, 654 Cherry Street NW Atlanta, GA 30332-0170, USA.
Tracy L. Mitzner, School of Psychology, Georgia Institute of Technology, 654 Cherry Street NW Atlanta, GA 30332-0170, USA
Jenay M. Beer, School of Psychology, Georgia Institute of Technology, 654 Cherry Street NW Atlanta, GA 30332-0170, USA
Akanksha Prakash, School of Psychology, Georgia Institute of Technology, 654 Cherry Street NW Atlanta, GA 30332-0170, USA.
Tiffany L. Chen, Department of Biomedical Engineering, Georgia Institute of Technology, 828 West Peachtree Street NW, Atlanta, GA 30308, USA
Charles C. Kemp, Department of Biomedical Engineering, Georgia Institute of Technology, 828 West Peachtree Street NW, Atlanta, GA 30308, USA
Wendy A. Rogers, School of Psychology, Georgia Institute of Technology, 654 Cherry Street NW Atlanta, GA 30332-0170, USA
References
- 1.Administration on Aging. [Accessed 15 November 2012];A profile of older Americans: 2009. 2009 http://www.aoa.gov/aoaroot/aging_statistics/Profile/index.aspx.
- 2.American Association Retired Persons. [Accessed 15 November 2012];Beyond 50.05 survey. 2005 http://assets.aarp.org/rgcenter/il/beyond_50_05_survey.pdf.
- 3.Lawton MP. Aging and performance of home tasks. Hum Factors. 1990;32(5):527–536. doi: 10.1177/001872089003200503. [DOI] [PubMed] [Google Scholar]
- 4.Rogers WA, Meyer B, Walker N, Fisk AD. Functional limitations to daily living tasks in the aged: a focus group analysis. Hum Factors. 1998;40(1):111–125. doi: 10.1518/001872098779480613. [DOI] [PubMed] [Google Scholar]
- 5.Fausset CB, Kelly AJ, Rogers WA, Fisk AD. Challenges to aging in place: understanding home maintenance difficulties. J Hous Elderly. 2011;25(2):125–141. doi: 10.1080/02763893.2011.571105. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 6.Seidel D, Crilly N, Matthews FE, Jagger C, Clarkson PJ, Brayne C. Patterns of functional loss among older people: a prospective analysis. Hum Factors. 2009;51(5):669–680. doi: 10.1177/0018720809353597. [DOI] [PubMed] [Google Scholar]
- 7.Cruickshanks K, Wiley TL, Tweed TS, Klein BE, Klein R, Mares-Perlman JA, Nondahl DM. Prevalence of hearing loss in older adults in Beaver Dam, Wisconsin: the epidemiology of hearing loss study. Am J Epidemiol. 1998;148:879–886. doi: 10.1093/oxfordjournals.aje.a009713. [DOI] [PubMed] [Google Scholar]
- 8.The Lighthouse Inc. [Accessed 15 November 2012];The Lighthouse national survey on vision loss: experience, attitudes, and knowledge of middle-aged and older Americans. 1995 http://www.lighthouse.org/research/archived-studies/national-survey/
- 9.Kelly AJ, Fausset CB, Rogers WA, Fisk AD. Responding to home maintenance challenge scenarios: the role of selection, optimization, and compensation in aging-in-place. J Appl Gerontol. 2012 doi: 10.1177/0733464812456631. [DOI] [PubMed] [Google Scholar]
- 10.Baltes MM, Lang FR. Everyday functioning and successful aging: the impact of resources. Psychol Aging. 1997;12(3):433–443. doi: 10.1037//0882-7974.12.3.433. [DOI] [PubMed] [Google Scholar]
- 11.Mitzner TL, Chen TL, Kemp CC, Rogers WA. Hum factors and ergonomics soc 55th annu meet. Las Vegas, NV: 2011. Older adults' needs for assistance as a function of living environment; pp. 152–156. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 12.Pew Research Center. [Accessed 15 November 2012];The return of the multi-generational family household. 2010 http://www.pewsocialtrends.org/files/2010/10/752-multi-generational-families.pdf.
- 13.Fields J. America's families and living arrangements: 2003 (Current Population Reports P20-553) U.S. Census Bureau; 2003. [Accessed 15 November 2012]. http://www.census.gov/prod/2004pubs/p20-553.pdf. [Google Scholar]
- 14.Houser A, Gibson MJ, Redfoot DL. Trends in family care-giving and paid home care for older people with disabilities in the community: data from the National Long-Term Care Survey. AARP Public Policy Institute; 2010. [Accessed 15 November 2012]. http://assets.aarp.org/rgcenter/ppi/ltc/2010-09-caregiving.pdf. [Google Scholar]
- 15.Boyle G. The role of autonomy in explaining mental ill-health and depression among older people in long-term care settings. Ageing Soc. 2005;25(5):731–748. [Google Scholar]
- 16.Baltes PB, Baltes MM. Psychological perspectives on successful aging: the model of selective optimization with compensation. In: Baltes P, Baltes M, editors. Successful aging: perspectives from the behavioral sciences. Cambridge University Press; New York: 1990. pp. 1–34. [Google Scholar]
- 17.Heerink M, Kröse B, Evers V, Wielinga B. Assessing acceptance of assistive social agent technology by older adults: the Almere model. Int J Soc Robot. 2010;2:361–375. doi: 10.1007/s12369-010-0068-5. [DOI] [Google Scholar]
- 18.Ezer N, Fisk AD, Rogers WA. Attitudinal and intentional acceptance of domestic robots by younger and older adults. Lect Notes Comput Sci. 2009;5615:39–48. doi: 10.1007/978-3-642-02710-9_5. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 19.Ezer N, Fisk AD, Rogers WA. (2009) More than a servant: self-reported willingness of younger and older adults to having a robot perform interactive and critical tasks in the home. Hum factors and ergonomics soc 53rd annu meet. 2009 Oct 1;2:136–140. doi: 10.1177/154193120905300206. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 20.Sung JY, Grinter RE, Christensen HI. Domestic robot ecology: an initial framework to unpack long-term acceptance of robots at home. Int J Soc Robot. 2010;2(4):417–429. doi: 10.1007/s12369-010-0065-8. [DOI] [Google Scholar]
- 21.Broadbent E, Stafford R, MacDonald BA. Acceptance of healthcare robots for the older population: review and future directions. Int J Soc Robot. 2009;1(4):319–330. doi: 10.1007/s12369-009-0030-6. [DOI] [Google Scholar]
- 22.Forlizzi J, DiSalvo C, Gemperle F. Assistive robotics and an ecology of elders living independently in their homes. Hum-Comput Interact. 2004;19:25–59. [Google Scholar]
- 23.Meng Q, Lee MH. Design issues for assistive robotics for the elderly. Adv Eng Inform. 2006;20(2):171–186. doi: 10.1016/j.aei.2005.10.003. [DOI] [Google Scholar]
- 24.Oestreicher L, Severinson Eklundh K. 15th IEEE int symposium on robot and hum interact commun. Sep 6–8, 2006. (2006) User expectations on human-robot co-operation; pp. 91–96. [DOI] [Google Scholar]
- 25.Dautenhahn K, Woods S, Kaouri C, Walters ML, Kheng Lee K, Werry I. (2005) What is a robot companion—friend, assistant or butler? IEEE/RSJ int conf on intell robots and syst. 2005 Aug 2–6;:1192–1197. doi: 10.1109/IROS.2005.1545189. [DOI] [Google Scholar]
- 26.Lohse M, Hegel F, Wrede B. Domestic applications for social robots - an online survey on the influence of appearance and capabilities. J Phys Agents. 2008;2(2):21–32. [Google Scholar]
- 27.Hegel F, Lohse M, Swadzba A, Wachsmuth S, Rohlfing K, Wrede B. (2007) Classes of applications for social robots: a user study. 16th IEEE int symposium on robot and hum interact commun. 2007:938–943. doi: 10.1109/ROMAN.2007.4415218. [DOI] [Google Scholar]
- 28.Hegel F, Lohse M, Wrede B. Effects of visual appearance on the attribution of applications in social robotics. 18th IEEE int symposium on robot and hum interact commun. 2009 Sep 27 2;Oct 27 2;:64–71. doi: 10.1109/ROMAN.2009.5326340. [DOI] [Google Scholar]
- 29.Khan Z. Attitudes towards intelligent service robots (TRITA-NA-P9821, IPLab-154) Royal Institute of Technology; 1998. [Accessed 15 November 2012]. ftp://ftp.nada.kth.se/IPLab/TechReports/IPLab-154.pdf. [Google Scholar]
- 30.Sung JY, Christensen HI, Grinter RE. (2009) Sketching the future: assessing user needs for domestic robots. 18th IEEE int symposium on robot and hum interact commun. 2009 Sep 27 2;Oct 27 2;:153–158. doi: 10.1109/roman.2009.5326289. [DOI] [Google Scholar]
- 31.Broadbent E, Tamagawa R, Patience A, Knock B, Kerse N, Day K, MacDonald BA. Attitudes towards health-care robots in a retirement village. Australas J Ageing. 2011 doi: 10.1111/j.1741-6612.2011.00551.x. [DOI] [PubMed] [Google Scholar]
- 32.Bugmann G, Copleston S. What can a personal robot do for you? In: Groß R, Alboul L, Melhuish C, Witkowski M, Prescott TJ, Penders J, editors. Towards autonomous robotic systems Lecture notes in computer science. Vol. 6856. Springer; Berlin: 2011. pp. 360–371. [DOI] [Google Scholar]
- 33.Mast M, Burmester M, Kruger K, Fatikow S, Arbeiter G, Graf B, Kronreif G, Pigini L, Facal D, Qiu R. User-centered design of a dynamic-autonomy remote interaction concept for manipulation-capable robots to assist elderly people in the home. J Hum-Robot Interact. 2012;1(1):96–118. doi: 10.5898/JHRI.1.1.Mast. [DOI] [Google Scholar]
- 34.Davis FD. Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. 1989;13(3):319–340. [Google Scholar]
- 35.Flick U. An introduction to qualitative research. 4th. SAGE; Los Angeles: 2009. [Google Scholar]
- 36.Czaja SJ, Charness N, Fisk AD, Hertzog C, Nair SN, Rogers WA, Sharit J. Factors predicting the use of technology: findings from the Center for Research and Education on Aging and Technology Enhancement (CREATE) Psychol Aging. 2006;21(2):333–352. doi: 10.1037/0882-7974.21.2.333. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 37.Federal Interagency Forum on Aging Related Statistics. Older Americans 2010: key indicators of well-being. U.S. Government Printing Office; Washington, DC: 2010. [Google Scholar]
- 38.Fisk AD, Rogers WA, Charness N, Czaja SJ, Sharit J. Designing for older adults: principles and creative human factors approaches. 2nd. CRC Press; Boca Raton: 2009. [Google Scholar]
- 39.Cakmak M, Takayama L. Towards a comprehensive chore list for domestic robots; 8th ACM/IEEE int. conf. on hum.robot interact; Tokyo, Japan. March 2013; 2013. pp. 93–94. [DOI] [Google Scholar]
- 40.Beer JM, Smarr CA, Chen TL, Prakash A, Mitzner TL, Kemp CC, Rogers WA. The domesticated robot: design guidelines for assisting older adults to age in place; 7th ACM/IEEE int. conf. on hum.robot interact; Boston, MA. March 2012; 2012. pp. 335–342. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 41.Woods S, Walters ML, Koay KL, Dautenhahn K. Methodological issues in HRI: a comparison of live and video-based methods in robot to human approach direction trials; 15th IEEE int. symposium on robot and hum. interact. commun; Hatfield, UK. 6–8 September 2006; 2006. pp. 51–58. [Google Scholar]
- 42.Smarr CA, Prakash A, Beer JM, Mitzner TL, Kemp CC, Rogers WA. Hum factors and ergonomics soc 56th annu meet. Boston, MA: 2012. Older adults' preferences for and acceptance of robot assistance for everyday living tasks; pp. 153–157. [DOI] [PMC free article] [PubMed] [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.