

Abstract
Scientists are exploring elastic and soft forms of robots, electronic skin and energy harvesters, dreaming to mimic nature and to enable novel applications in wide fields, from consumer and mobile appliances to biomedical systems, sports and healthcare. All conceivable classes of materials with a wide range of mechanical, physical and chemical properties are employed, from liquids and gels to organic and inorganic solids. Functionalities never seen before are achieved. In this review we discuss soft robots which allow actuation with several degrees of freedom. We show that different actuation mechanisms lead to similar actuators, capable of complex and smooth movements in 3d space. We introduce latest research examples in sensor skin development and discuss ultraflexible electronic circuits, light emitting diodes and solar cells as examples. Additional functionalities of sensor skin, such as visual sensors inspired by animal eyes, camouflage, self-cleaning and healing and on-skin energy storage and generation are briefly reviewed. Finally, we discuss a paradigm change in energy harvesting, away from hard energy generators to soft ones based on dielectric elastomers. Such systems are shown to work with high energy of conversion, making them potentially interesting for harvesting mechanical energy from human gait, winds and ocean waves.
1. Introduction
We are surrounded by soft matter, materials in a variety of physical and chemical states that are easily deformed when exposed to external stimuli. Have a look at our human hand, a soft endoskeleton-based machine with which we easily manipulate, rotate and reposition objects by moving thumb and fingers together without even actively thinking.1 Imagine human skin – a great example of an ultra-compliant large area electronic circuit, sensitive to touch, temperature changes, humidity and many other environmental stimuli.2 Scientists are inspired by the apparent simplicity and true complexity of nature, dreaming to mimic nature to create a world of engineered soft matter devices.
It is impossible to cover all high technology applications of soft materials in a single paper. Instead of challenging the task of a complete review of current soft matter research, we rather wish to highlight a few areas of currently on-going cross-disciplinary research with unusual materials science aspects, applying soft materials in situations where hard materials alone will fail. We hope that the discussions presented here will lead to an exchange of ideas between different research communities and to new incentives for future work. In section 2 we briefly discuss soft robots with multiple degrees of freedom based on elastomeric materials. Section 3 summarizes recent research on ultrathin electronic sensor skin, solar cells and light emitting diodes, visual sensors, camouflage, self-cleaning and -healing, and on-skin energy storage. These emerging technologies promise applications in diverse fields from architectural design, consumer and mobile electronic appliances, biomedical systems, healthcare and sports and will help soft robots to appropriately operate in unexpected situations and unstructured environments. In section 4 we will discuss a paradigm shift in energy generation, away from traditionally hard generators towards soft ones based on elastomers; potentially useful for harvesting mechanical energy from renewable energy sources. We currently see new developments in those selected fields at a breath-taking speed, indicating a bright future for applied soft materials research.
2. Soft Robots
Robots employed in manufacturing are usually designed to be stiff; composed of rigid materials like alloys, metals, and magnets, they are perfect for repetitive work due to their fast, precise and strong operation. The natural world is different, ranging from the fully soft-bodied octopus to living beings with stiff endo- (e.g. humans) or exoskeletons (insects for example). Figure 1 illustrates two extremes of robots, hard robots with at least one actuator for each joint, and soft robots with actuators typically integrated and distributed throughout the robot’s structure.[3a] Robots are dexterous, able to monitor and precisely control position in space, they should be able to manipulate and load objects. Detailed information on the robotic aspects is given in two recent reviews.3b, c
Figure 1.
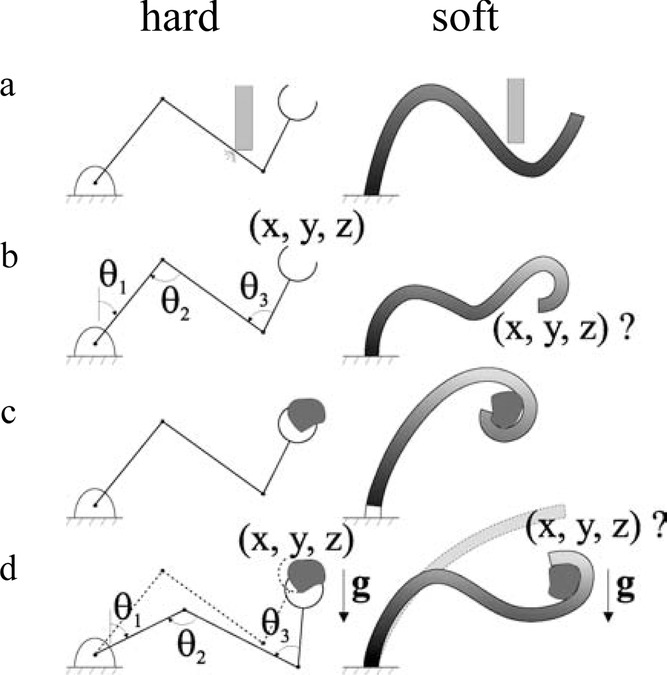
Two extremes: Hard and soft robots. Hard robots are rigid-linked, with actuators for every joint. Soft robots on the other hand have actuators integrated and distributed throughout the robot. Robots are (a) dexterous, (b) able to monitor and control position, (c) able to manipulate and (d) to load objects. Reproduced with permission.3a Copyright 2008, Taylor & Francis.
In the last decades the field of soft robots came into the view of materials scientists, enabling the development of new materials for actuation, including shape-memory materials,4 ionic liquids and polymers,5 polyelectrolyte gels,6 electro-active polymers,7 and carbon nanotubes.8 In this review we only focus on two actuation schemes to illustrate the multi-degree of freedom actuation capabilities of soft robots. The first actuation mechanism rests upon dielectric elastomers – an example of an electro-active polymer,7b, c the second relies on pneumatic networks of channels in elastomers,9 which inflate very much like balloons. What are the challenges to create such machines? First of all we need to gain experience in working with strongly deformable structures. Hard robots rely on stiff and mechanically strong materials, soft robots employ mechanically highly nonlinear materials, which often change their stiffness when rapidly stretched, or display creep under constant loads. Maximum strain before rupture, hysteresis in the stress-strain curves, toughness and fatigue are mechanical properties that need to be better understood in future soft materials research. These time and history dependent properties of soft materials not only make modelling challenging, they also require distributed sensory feedback in the practical design of soft robots.
Figure 2 shows how completely different material combinations with disparate actuation mechanisms lead to similar robotic actuators with capabilities for actuation with multiple degrees of freedom. Bending and gripping are simple actuation mechanisms of our hand that can be mimicked by dielectric elastomers.10a, b Figure 2a displays a gripping element based on dielectric elastomers,10b the element was fabricated using planar process steps only. The device fabrication starts with a pre-stretched elastomer, laminated on a flexible frame structure. Upon release, the elastomer relaxes to reduce its elastically stored energy, while the frame bends, increasing its bending energy. The elastomer is coated with compliant electrodes to form a deformable electrostatic capacitor. The final equilibrium state without applied voltage resembles the form of a gripping element with three fingers (Figure 2a left). When a voltage of 3kV is applied to the elastomer, the thickness of the elastomer reduces, and the area expands, resulting in an opening of the three fingers (Figure 2a middle). Finally, by removing the voltage the three fingers grasp the object (Figure 2a right). Dielectric elastomers even allow for the operation of actuators without attached electrodes. In such a configuration charges are sprayed on the elastomer surface. A step further is a reconfigurable robot that folds into various 3d shapes from an initial flat configuration. Examples include magnet-based systems folding into different configurations, like a “paper airplane” and a “boat”.11a Thermally responsive programmable materials based on carbon nanotube-hydrogel polymer composites have been shown to enable structures folding into a cube, and sheets folding into “flowers”.11b
Figure 2.

Grippers based on dielectric elastomers and PneuNets. (a) Dielectric elastomer actuator gripping a small Teflon cylinder. Reprinted with permission.10 Copyright 2007, American Institute of Physics. (b) Finite element modelling of the dielectric elastomer actuator in (a). Reprinted with permission.12a Copyright 2008, American Institute of Physics. (c) PneuNet actuator gripping a raw egg. Reprinted with permission.9a Copyright 2011, Wiley-VCH.
Figure 2b illustrates the challenges in mechanically modelling soft robots with distributed actuation.12a The developed computational code can be embedded in commercial finite element software. The modelling is based on a general, nonlinear electromechanical theory of dielectric elastomers.[12b Figure 2b shows the simulation of the self-assembly of the robotic element from the planar structure (Figure 2b, left), as well as the opening (Figure 2b, middle) and closing (Figure 2b, right) of the element. Such modelling needs to be developed to describe the programmable deformation of soft robots in three dimensions, and may be widely used to describe also elements with other materials and actuation concepts, as shown for example in Figure 2c.
Figure 2c depicts a six-fingered pneumatically-driven soft gripping element with embedded pneumatic networks (PneuNets) in elastomers.9a Although the design and actuation mechanism is different to the robotic element in Figure 2a, the behaviours of the grippers are very similar. From a technological point of view, the fabrication relies on concepts well known in soft lithography and micro-fluidics, namely: formation of channels in elastomers. Critical for the success of the PneuNet technology are adhesives that strongly bond different elastomeric layers and facilitate fabrication. The PneuNet gripper is shown to be able to safely grip sensitive objects, like an uncooked egg. Multi-gait soft robots,9b robotic tentacles9c and soft robots powered by chemical explosions9d were reported by the same research group.
There are many other possibilities to produce grippers, such as jamming of granular material.13 The materials science aspect in soft robots is manifold, from the development of new materials towards the combination of largely different materials. One example are elastomeric origami, where paper and elastomers are combined to form pneumatic actuators.14 In dielectric elastomer research, materials are needed with a wide range of elastic moduli, combined with very low viscosity and electrical conductivity, high dielectric constant and breakdown strength. Additionally stretchable conductors are required which do not significantly impart the mechanics of the actuator. Detailed reviews on dielectric elastomer actuators15 and on stretchable conducting electrodes are available16; therefore we selected only a few recent actuator and material developments published the last and this year to highlight impulses for future research.
Instabilities in dielectric elastomer actuators under applied voltage were used to achieve a voltage triggered actuation with a huge area expansion of around 1700%.17a, b The wrinkling instability of dielectric elastomer actuators under large electric fields was exploited in a twist actuator that produced in-plane rotation.17c Larger voltage triggered deformation was achieved with a dielectric elastomer under equibiaxial loading with a dead load. The use of dead load suppressed electrical breakdown, which enabled the elastomer actuator to survive the snap-through electromechanical instability.17d The development of soft robots with large stroke actuation enabled by instabilities in elastomeric systems seems to be an urgent task for future research. Programmable bi-stable elastomer actuators with shape memory were developed based on interpenetrating polymer networks,18a featuring compliant silver nanowire-polymercomposite electrodes.18b Applications of such systems may occur in Braille displays. PDMS appears to be promising for dielectric elastomer actuators, being less viscous than acrylic rubbers,19a exhibiting long lifetime and fault-tolerance when used with self-clearing carbon nanotube compliant electrodes.19b Organically modified silicone polyurethane networks promise tailored dielectric elastomer materials.19c Cross-linked carbon black/PDMS conducting elastomer electrodes,20a self-healing printable, stretchable and conductive composites of graphite nanoplatelets in silicone,20b and ultra-stretchable conductors based on liquid metals and cross-linked thermoplastic elastomer gels20c mark some developments in stretchable electrodes. There is still significant room for improvement of materials to meet industrial requirements regarding lifetime and fault-tolerance, which are essential for applications in actual robotic devices. What about biodegradable dielectric elastomers? This would enable soft robots to ultimately behave like natural beings at the end of their life-span.
The PneuNet approach resulted in a series of soft robot demonstrators, where the design is mostly based on intuition.9a–d Material development is an apparent issue; for example adhesives that allow bonding of different elastomeric layers.9a Some of the materials developed for dielectric elastomers may also be useful in PneuNet robots. A strong focus of future research should be on the underlying mechanics and physics of PneuNets, with the development of standard procedures for robot testing. Being based on the inflation of balloon like cavities, instabilities may occur in PneuNet robots, which ultimately may be exploited for actuators with large actuation strokes, as was shown with dielectric elastomers.
3. Sensor Skin
Flexible and stretchable electronic skin is the next ubiquitous platform.21a The history, present and potential future of electronic skin has been thoroughly reviewed this year in this journal.21b Skin is stretchable, and so electronic skin should also be stretchable. Many research groups concentrated their work on the tactile sensing abilities of our skin, but skin has many more functions helping us to respond properly to surroundings varying unpredictably. Although stretchable electronics is a rather new field of research, there are already many reviews available, summarizing the state-of-the-art in the field until 2012.22 In this chapter we briefly discuss most recent developments in ultrathin electronic skin,23–25 in light emitting diodes and displays26–28 and conformable solar cells.29–31 We also discuss visual systems, which are interesting due to their ability to match nonplanar image sources, or their wide fields of view. Camouflage, self-cleaning and healing are further properties of many animals, ultimately helping them to adapt to and survive in their respective environment. Mimicking such structures technically poses challenging research questions in materials science with potential for new products and applications.
3.1. Ultrathin Electronic Skin
Scientists are interested in the extremes; they are encouraged to raise questions such as “how flexible” and “how light” electronics can be. Conformable sensors, biodegradable electronics and rollable displays require highly flexible electronic circuits.
Figure 3 illustrates important steps toward ultra-flexibility of electronic devices. Figure 3a displays organic transistors on a support film with a thickness of 12 μm. The device could be bent with a radius of 100 μm without degradation, with potential applications in catheters for monitoring physical and chemical properties in long and narrow tubes such as blood vessels.23a Electronics that achieved thickness, elastic moduli and stiffness perfectly matched to human skin may enable direct measurement of heart, brain, muscle and other human activities.24a Epidermal electronics in ultrathin format directly bonded on skin improved the mechanics and robustness of the devices. Figure 3b shows an epidermal electronic skin with a releasable connector, enabling reversible and low resistance electrical contacts by van der Waals adhesion forces.24b Figure 3c shows an example of ultrathin silicon integrated circuits on plastic developed by industrial research.25 The silicon circuits used in this work were only a few μm thick and included ring oscillators and memory cells, paving the way for ultra-light flexible nanoelectronics. Figure 3d finally displays the most lightweight and flexible organic circuit available today. The sensor film with a total thickness of only 2 μm contains an active matrix organic transistor backplane coupled with a resistive tactile frontplane, it weighs only 3 g/m,2 it can be wrapped into a radius of 5 μm and crumpled like a piece of paper.23b
Figure 3.
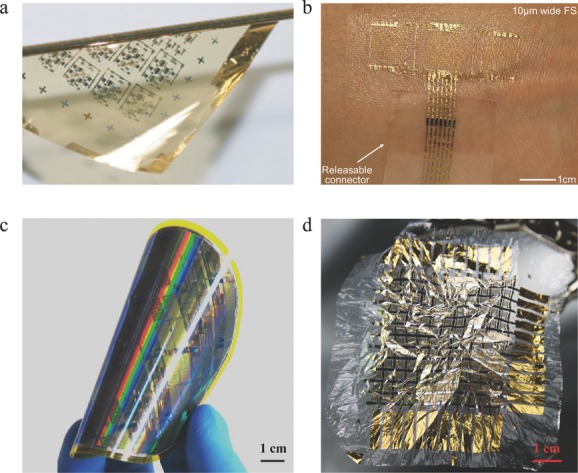
Examples of ultrathin and flexible electronic circuits. (a) Organic transistor circuits on plastic films enabling bending down to a radius of 100 μm. Reprinted with permission.23a Copyright 2010, Macmillan Publishing Ltd. (b) Epidermal electronic systems with releasable connectors directly on skin Reprinted with permission.24b Copyright 2013, Wiley-VCH. (c) Ultrathin silicon circuits on plastic films. Reprinted with permission.25 Copyright 2013 American Chemical Society. (d) Imperceptible tactile sensor film that can be crumpled like a piece of paper. Reprinted with permission.23b Copyright 2013, Macmillan Publishing Ltd.
This progress in device demonstrations is achieved by advances in materials development. There are several reviews available on various aspects of organic electronics, including growth and morphology,32a charge injection,32b operational and environmental stability32c and device fabrication.32d–f Here we briefly mention two studies with a focus on thermal stability: organic semiconductors able to withstand autoclaving;33a and organic semiconductors with a thermal stability up to 250 °C.33b It is also interesting to note that highly crystalline solution processed small molecule organic semiconductors grown on thin plastic sheets are intrinsically highly flexible.33c Gate dielectrics are crucial for organic electronic circuits;34 recent advances in potentiostatic anodization revealed dense high-k aluminium oxide gate dielectrics for thin film capacitors,35a memories35b and active matrix integrated circuits.23b Initial studies on electronics with biodegradable parts36 led to the development of a transient form of silicon electronics, where all parts of the electronic circuits are biocompatible and –degradable.37 Inspiration from nature38 triggered the test of new paradigms in organic semiconductor materials with strong intermolecular hydrogen-bonding, delivering high mobility materials coupled with stability in air.39 Not surprising, there are now many reports of electronics coupled to living organisms, for example to record neuronal activities.40 The currently available library of materials allows for device fabrication in organic and hybrid systems with an unprecedented level of system complexity, however, the way to the market still seems to be long.
3.2. LEDs and Solar Cells
Active matrix organic light emitting diode displays have successfully entered the market for mobile appliances and may be the next generation TVs, replacing liquid crystals. In the natural world, plants use light for energy generation and many animals use light for communication. Taken as examples from nature, they inspired work to develop stretchable forms of light emitting diodes 26–28 and solar cells.29–31
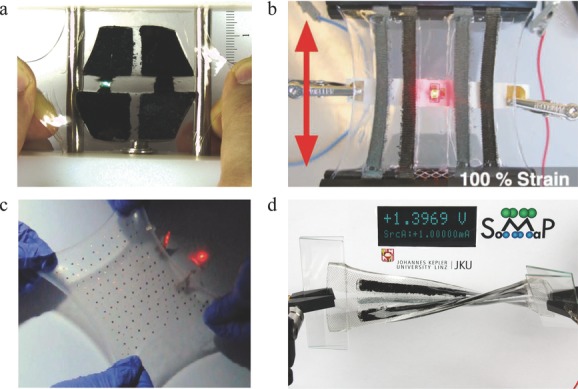
Figure 4 displays stretchable light emitting diodes and solar cells. Figure 4a shows arrays of interconnected ultrathin inorganic AlInGaP light-emitting diodes on stretchable substrates. The devices are waterproof and may enable applications on gloves, catheters, clinical medicine and robotics.26 Figure 4b illustrates polymer-based light-emitting electrochemical cells with electrodes consisting of a network of conducting carbon nanotubes embedded in a polymer host. When heated up to 70 °C, the light emitting cell is intrinsically stretchable to an extent of 45%.27 Figure 4c displays organic polymer light emitting diodes on ultrathin polymer film substrates. Such PLEDs can be crumpled, they become stretchable when laminated on a pre-stretched elastomer. Upon relaxation of the elastomer the diodes wrinkle without noticeable device degradation.28
Figure 4.
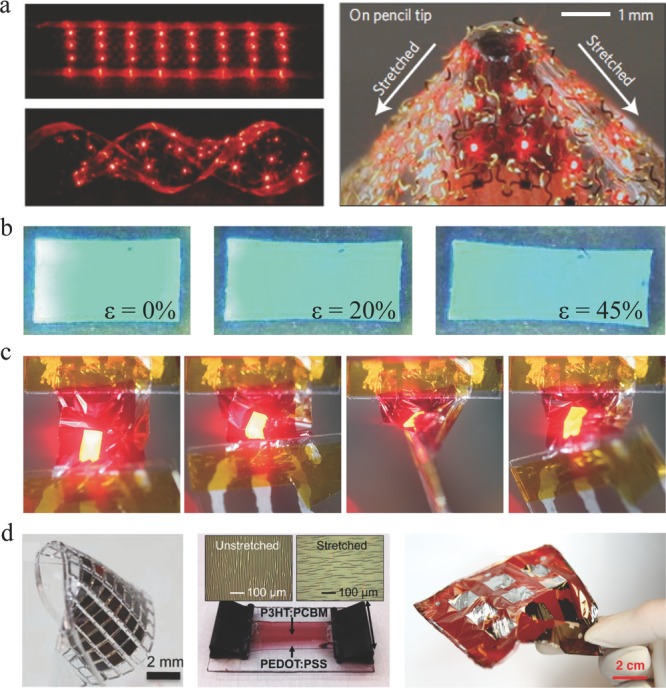
Stretchable light emitting diodes and displays and stretchable organic solar cells. (a) Waterproof ultrathin inorganic AlInGaP light emitting diodes on stretchable substrates. Reprinted with permission.26 Copyright Macmillan Publishing Ltd. (b) Intrinsically stretchable polymer based light emitting electrochemical cells. Reprinted with permission.27 Copyright 2011, Wiley-VCH. (c) Ultrathin organic polymer light emitting diodes withstanding crumpling like a piece of paper. Reprinted with permission.28 Copyright 2013, Macmillan Publishing Ltd. (d) Stretchable GaAs solar cells with high areal coverage (left image) (Reprinted with permission.29 Copyright 2011, Wiley-VCH); stretchable organic solar cell (middle image). (Reprinted with permission.30 Copyright, Wiley-VCH), and ultrathin and lightweight organic solar cell (right image) (Reprinted with permission.31b Copyright 2013, IEEE).
Organic solar cells developed from a scientific curiosity to a technology close to the market. Efficiencies around 10% and lifetimes of thousands of hours mark the state of the art in the field.41 Making solar cells stretchable to enable on-electronic-skin energy generation is a technological challenge. Several research teams were able to show stretchable forms of solar cells. Inorganic thin GaAs based solar cells were employed with high areal coverage on stretchable elastomeric substrates to form compliant solar cells (Figure 4d left image).29 The first stretchable organic solar cell used liquid metal alloy electrodes (Figure 4d middle image).30 Solar cells fabricated on ultrathin polymer film substrates show a high specific power of 10 W/g,[31a due to their ultra-lightweight structure (Figure 4d right image).[31b Such solar cells become stretchable in a similar manner to the stretchable ultrathin light emitting diodes. Stretchable OLEDs and solar cells are still in a very infant state but they show promise in a wide range of applications spanning from robotics to clinical healthcare.
3.3. Tuneable Colors and Camouflage
Cephalopods, many insects, and chameleons are astonishing in their ability to change their coloration for camouflage. Only recently scientists started to replicate the color changing abilities of animals with soft systems, potentially enhancing the function of robots and prosthetics. Nature offers many ways to obtain structural colours, which inspired scientists to develop biomimetic photonic materials with tunable structural colors.42 Figure 5 shows examples of tunable colors, which may be used to camouflage soft machines. Figure 5a shows a rubberlike elastic hydrogel with microdomains of bilayers periodically stacked into the polymer network.43 The hydrogel is able to tune color reversibly over the entire visible spectrum. Immediate applications arise in strain sensors able to detect local strains optically by means of color changes. Figure 5b displays an example of an electrically controlled structural color. In this work, polymer opals are combined with dielectric elastomers to produce voltage-tuneable colors on large scale.44 Figure 5c shows a very interesting application of the surface wrinkling of elastomeric coatings. In the flat state, the elastomer is transparent (left image), in the wrinkled state the elastomer becomes translucent (right image).45 The wrinkled state is induced by applying a voltage across the elastomer coating. Practical applications may arise in smart switchable glass windows. The most advanced demonstration of a camouflage system is depicted in Figure 5d.46 The Figure shows a soft robot with microfluidic channels embedded in elastomers. When filled with coloured liquids the soft robot is able to adapt to different surroundings. By using liquids of different temperatures it is possible to camouflage the object in the infrared and/or visible spectral range.
Figure 5.
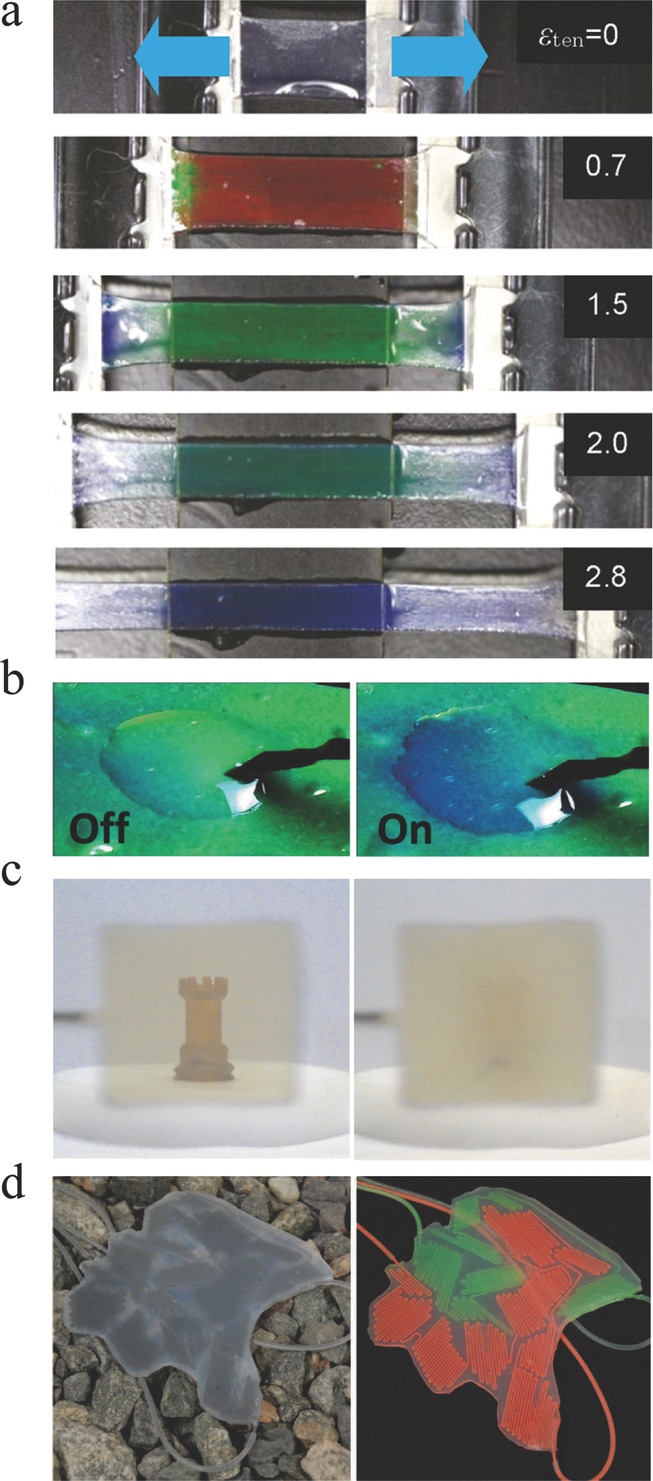
(a) Mechanically tunable colours in a hydrogel with microdomains of bilayers periodically stacked in the polymer host. Reprinted with permission.43 Copyright 2011, American Chemical Society). (b) Tunable structural color by combining polymer opals and dielectric elastomer actuators. Under an applied voltage the color changes from green to blue. Reprinted with permission.44 Copyright 2012, American Institute of Physics. (c) Electrically triggered surface wrinkling in elastomeric coatings changes the appearance of the coating from transparent to translucent. Reprinted with permission.45 Copyright 2013, Wiley-VCH. (d) Camouflage and display of soft machines by pumping coloured liquids into networks of microfluidic channels. Reprinted with permission.46 Copyright 2012, AAAS.
Tunable structural colours are perfect playgrounds for nanotechnology, enabling the construction of a wide range of nano-architectures. When combined with different actuation schemes, such adjustable colours open applications in the camouflage of soft machines. Alternative routes are in the further development of devices based on microfluidics, which may also be combined with dielectric elastomer actuators.47 Smart glass and windows with tunable colours may be an immediate application of such technologies.
3.4. Self-Cleaning and -Healing
Self-cleaning technology is quite new with the potential for broad applications from glass for windows, mobiles and TVs to solar cells; further developments include anti-smudge and anti-fouling as environmentally green technologies.48 In this review we have selected work describing an anti-fouling elastomeric surface.49 Self-cleaning and -healing are also features of plants and animals, and may be highly useful in electronic skin, robotics, healthcare and many other application areas. There are reviews available on self-healing polymers,50 so the following discussion is very brief with few selected examples of self-healing elastic materials.
Figure 6 shows examples of self-cleaning and -healing demonstrators. Figure 6a illustrates the self-cleaning of elastomer surfaces. An applied electric field significantly deforms the elastomer surface (left image), and leads to detachment of biofilms (middle and right images before and after voltage application).49a The technique shows potential for anti-fouling applications. It is interesting to note that crumpled graphene films form superhydrophobic surfaces, allowing for coatings with tunable wettability.51 Figure 6b depicts a thermoreversible rubber formed from low cost raw ingredients, such as fatty acids and urea, healing at room temperature.52 Inspired by such self-healing properties of rubbers researchers have taken the challenge to develop electrically and mechanically self-healing composites.53 Figure 6c shows an example of a self-healing composite based on a supramolecular organic polymer with embedded nickel nanostructured microparticles.53a The composite reached conductivities up to 40 S/cm and healing was achieved after 15 s. The mechanical properties are completely restored after 10 minutes, potentially expanding the applicability of electronic skin systems. Figure 6d shows another example of a healable, semitransparent polymer composite conductor with embedded silver nanowires. The copolymer selected is formed from monomers with two maleimide groups and four furan groups. The image sequence in Figure 6d shows the composite conductor before cutting, after cutting and after healing at 110 °C for 3 min.53b Self-cleaning and healing are promising developments and the emerging technologies have obvious potential for applications in mobile and consumer devices, such as displays, in robots and also in healthcare and sports. Material design aspects should concentrate on room temperature healable materials, so that we might have complex self-repairing electronic circuits in the future.
Figure 6.
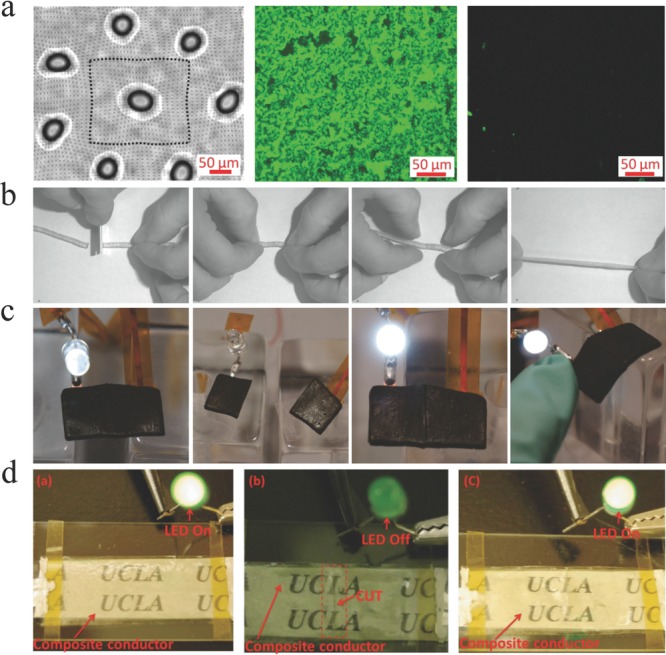
Self-cleaning and healing. (a) Voltage controlled dynamic topography surfaces based on dielectric elastomers for detaching bacterial biofilms. The electric field causes deformation of the elastomer surface (left image), which detaches over 95 % of the biofilm (middle and right image before and after deformation). Reprinted with permission.49a Copyright 2013, Wiley-VCH. (b) Rubber composite healing at room temperature. The sequence of images shows cutting, joining, mending and stretching the rubber after healing. Reprinted with permission.52 Copyright 2008, Macmillan Publishing Ltd. (c) and (d) show two examples of electrically and mechanically self-healable polymer composites, in (c) the composite contains nickel microparticles Reprinted with permission.53a Copyright 2012 Macmillan Publishing Ltd.) in (d) silver nanowires to achieve electrical conductivity. Reprinted with permission.53b Copyright 2013, Wiley-VCH.
3.5. Visual Sensors
Although not a direct part of skin, most developed living organisms have highly sophisticated visual systems; some of them are very different from our eye, a single-chambered camera with a retina and a single lens with an adjustable focal length. Insects have compound eyes with many lenses, in total- at least ten schemes are known how eyes form images.54 Figure 7 illustrates two examples of electrically controllable single lenses based on dielectric elastomers (a,b)55a, b and two distinct eyes, mimicking our single-chambered eye with a curved photodetector instead of a retina (c) and a compound eye, similar to the eyes of many insects (d).56a, b
Figure 7.
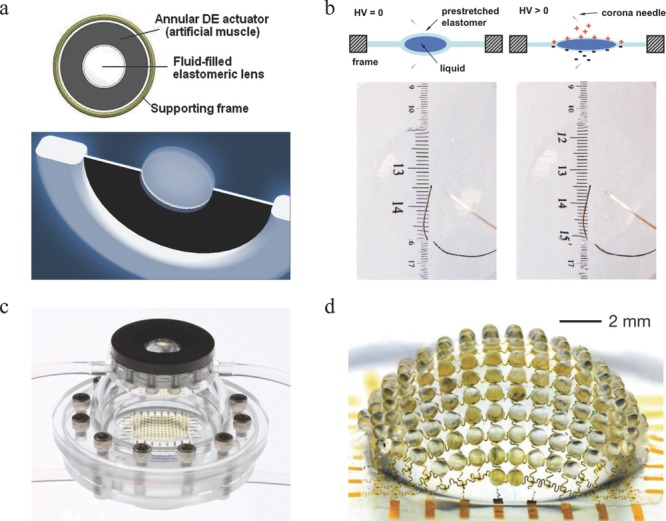
Artificial eye demonstrators. (a) Fluid filled elastomeric lens with an annular dielectric elastomer actuator working as an artificial muscle. Reprinted with permission.55a Copyright 2011, Wiley-VCH. (b) Electrode-free configuration of a fluid filled elastomeric lens with electrically tunable focal length. Reprinted with permission.55b Copyright 2010, National Academy of Sciences USA. The focal length is tuned by spraying charges on the elastomer surfaces. (c,d) Hemispherical eye (Reprinted with permission.56a Copyright 2011, National Academy of Sciences USA), and insect-like eye demonstrators (Reprinted with permission.56b Copyright 2013, Macmillan Publishing Ltd). with inorganic photodetector arrays on elastomeric surfaces deformable in hemispherical shapes.
Figure 7a shows a single fluid filled elastomeric lens with an annular elastomeric actuator working as an artificial muscle. When a voltage (between 1 to 3 kV) is applied to the annular actuator, the artificial muscle deforms the lens and changes the focal length. Advantages of the device are silent operation, compact size and low weight.55a Figure 7b shows a fluid filled elastomeric lens without any electrodes. This lens is driven by spraying electrical charges onto the elastomer by means of a corona discharge.[55b The current disadvantage of this technique is the high voltage needed, but there are options to spray charges on elastomers by using carbon-nanotube field emitters. There is a multitude of ways to adjust the focal length of lenses and some systems are already on the market. We note here the dielectric elastomer lens of Optotune and the TAG lens of TAG optics.57 There are clear incentives for future research, such as the development of highly transparent and stretchable electrodes. The eye camera demonstrations in Figure 7c and d56a, b are inspired by the human eye and by the eyes of insects. The hemispherical eye camera in Figure 7c employs inorganic photodetector arrays on thin elastomeric membranes. The photodetector arrays reversibly deform into a hemispherical shape, with hydraulically adjustable radii of curvature. The device is combined with a hydraulically tunable, fluidic lens to form a model eye. The technology might be interesting for soft robots, enabling them to see, and also in areas where compact cameras with adjustable focus are required, for example in mobile phones or endoscopic imaging.[56a The demonstrator in Figure 7d combines elastomeric optical elements with deformable arrays of silicon photodetectors on elastic sheets that can be deformed to hemispherical shapes to form an insect-inspired eye with a wide-angle view.[56b There are clear visions for future research, by combining the technology illustrated in Figure 7c and d with the artificial muscle technology depicted in Figure 7a and b.
3.6. Batteries for Energy Storage
Soft robots and also stretchable electronic items need energy storage elements. There exist several ways to store electrical energy in stretchable electronic systems58; here we solely discuss stretchable batteries and accumulators. Batteries are well-known components in electronics, so it may seem surprising that mechanically stretchable batteries were demonstrated only recently.59–61 Figure 8 displays several stretchable battery concepts, starting with an electrochemical zinc carbon cell that could be stretched up to 100% (Figure 8a).[59a The battery uses the chemically active elements in gel form, and a geometry with laterally arranged electrodes that prevents short circuits during mechanical stretching. An improvement of the technique is shown in Figure 8b where the current collectors are formed by textile meshes.60 The first stretchable and rechargeable Li-ion battery is illustrated in Figure 8c. This concept uses lithium ion batteries connected with self-similar serpentine interconnects, which are charged wireless. This rechargeable battery assembly showed extreme stretchability up to 300%, with a capacity of 1 mAh/cm2.61 Alkaline manganese batteries are also rechargeable, and the cell shown in Figure 8d uses this chemistry concept to build a stretchable energy storage element that withstood 700 mechanical stretch-relaxation cycles up to 25% strain and more than 20 full charge-discharge cycles.[59b 3d printing seems to be a promising tool for the fabrication of such stretchable battery systems. In a recent work interdigitated Li-ion microbatteries were fabricated by printing concentrated lithium oxide based inks.62
Figure 8.
Stretchable batteries. (a) Zinc carbon chemistry based battery stretched biaxially. Reprinted with permission.59a Copyright 2010 Wiley-VCH. (b) Zinc carbon based battery with stretchable textile meshes as current collectors. Reprinted with permission.60 Copyright 2012 Wiley-VCH. (c) Ultra-stretchable and rechargeable Li-ion battery with serpentine interconnects. Reprinted with permission.61 Copyright 2013 Macmillan Publishing Ltd. (d) Alkaline manganese rechargeable battery twisted and stretched during charging. Reprinted with permission.59b Copyright 2013 Royal Society of Chemistry.
Future research in sensor skin will likely focus on the combination of the various elements described in this review. Sensor skin coupled with actuators allows proprioception in soft robots. Interactive input and control devices are imaginable by an electronic skin with haptic and/or optical feedback, potentially useful in control panels and clinical diagnostics tools. Fully autonomous systems will most likely have highly flexible and stretchable power sources integrated, as well as energy efficient computation systems to process the received stimuli.
4. Energy Harvesters
Whenever we think of electrical energy generation, constructs formed with rigid and stiff materials, for example electromagnetic energy generators, are the predominant picture. With the use of dielectric elastomers as strongly deformable capacitors soft materials were suddenly considered as a base for energy generation. The state of the art in dielectric elastomer energy generation has been reviewed,15c, 22e so the final part of this paper aims to provide a flavor of soft matter energy generation discussing recent developments in the last two years. The idea behind dielectric elastomer energy generation is quite elementary. A dielectric elastomer with two compliant electrodes forms a mechanically deformable capacitor. When such a capacitor is stretched, its capacitance increases. When connected to a voltage source the capacitor is charged. Upon mechanical relaxation under open circuit conditions, charges are moved against the electrical field. Since the capacitance of the dielectric elastomer capacitor decreases, voltage increases and so does the electrical energy stored in the capacitor. In a simple way, the dielectric elastomer generator can be viewed as a charge pump, which pumps electrical charges from a low to a high potential. This fundamental and robust principle is at the heart of an emerging technology for the conversion of mechanical into electrical energy- and is to a large extent based on soft materials.
Figure 9a displays in a sketch the paradigm shift for ocean wave energy harvesting, where a rigid harvester made of steel and concrete components like the Pelamis63 is compared with a soft generator based on rubber tubes. There is industrial interest to use such elastomeric tube capacitors for ocean wave energy harvesting (Figure 9b), because elastomers are well suited to the harsh conditions found in open sea water.64 Figure 9c displays an example of a soft energy generator for small scale energy harvesting. The most remarkable feature of this harvester is the sole use of soft materials, elastomers, plastic frames and soft electronics based on carbon black/oil conductors [645]. The technology of dielectric elastomer energy harvesting is attractive because theoretical estimates indicate a large energy of conversion above 1 J/g.66 Energy of conversion is defined as electrical energy gained in a working cycle of the energy harvester. There are challenges that need to be solved before the technology will reach commercial maturity. In terms of material development it is necessary to identify the best-suited material. Newly developed dielectric elastomers must have excellent mechanical stretching properties with low viscous losses, they must display large rupture strain and slow mechanical fatigue combined with large dielectric permittivity and high dielectric breakdown strength. When operated in harsh environments, such as ocean water, dielectric elastomers must be chemically resistant and insensitive to swelling. We most likely do not even know all the material parameters that influence the performance of dielectric elastomer energy harvesters. Based on calculations, natural rubber seems to be a viable material candidate, but other materials like silicones and urethanes may also be considered as well.66b While the field is still in an infant state, experimentally a high energy of conversion from 0.12 J/g67a to more than 0.5 J/g67b was recently demonstrated.
Figure 9.

Hard and soft energy generators. (a) Rigid versus soft ocean wave energy converters (WEC). In the rigid generator steel and concrete dominate as used materials, whereas for the soft generator one may deploy rubber tubes into the ocean to be deformed by waves. (b) Experimental rubber tube system under water, showing the deformation by caused by waves Reprinted with permission.64 Copyright 2012, SPIE. The varying pressure level is indicated with a Ruben’s tube. (c) Soft energy harvester employing only soft materials, rubber, plastics and stretchable carbon black/oil composite conductors. Reprinted with permission.65 Copyright 2011, American Institute of Physics.
5. Conclusion
The last few years have seen an explosion of soft matter based demonstrators in robotics, electronic skin and energy harvesters. Soft robots with smooth and highly complex multi-degree of freedom 3d actuation are a reality, as is extremely flexible, bendable and stretchable electronic skin. Stretchable solar cells use the light of the sun to generate electrical energy; stretchable displays enable visual communication with compliant electronics. Energy can be stored in batteries and accumulators. Electronic skins with self-cleaning, self-healing and camouflage functionality have been demonstrated. We hope this review helps to convince the reader that with the currently available science and technology we are at the verge of witnessing the demonstration of truly complex bionic systems, eventually similar to the android “Data”, the visionary character from Star Trek. Without much doubt, the future of soft materials research is bright, and this century may later be termed “the soft matter age”.
Acknowledgments
This article is part of an ongoing series celebrating the 25th anniversary of Advanced Materials. All authors contributed equally to this review. Work partially supported by the Austrian Science Funds and by the European Research Council.
Note: The licence of this manuscript was updated after initial online publication.
References
- 1.Lenarcic J, Bajd T, Stanisic MM. Robot Mechanisms. Heidelberg, New York, London: Springer; 2013. , chapters 9 and 10. [Google Scholar]
- 2a.Tobin DJ. Chem. Soc. Rev. 2006;35:52. doi: 10.1039/b505793k. [DOI] [PubMed] [Google Scholar]
- 2b.Dahiya RS, Valle M, Sandini G. IEEE Trans. Robotics. 2010;26 [Google Scholar]
- 3a.Trivedi D, Rahn CD, Kier WM, Walker ID. Appl. Bion. Biomech. 2008;5:99. [Google Scholar]
- 3b.Pfeifer R, Lungarella M, Iida F. Commun. ACM. 2012;55 [Google Scholar]
- 3c.Kim S, Laschi C, Trimmer B. Trends. Biotechnol. 2013;31 doi: 10.1016/j.tibtech.2013.03.002. [DOI] [PubMed] [Google Scholar]
- 4a.Langer RA, Tirell DA. Nature. 2004;428:487. doi: 10.1038/nature02388. [DOI] [PubMed] [Google Scholar]
- 4b.Behl M, Lendlein A. Mater. Today. 2007;10 [Google Scholar]
- 4c.Debdatta R, Karger-Kocsis J. J. Mater. Sci. 2008;43 [Google Scholar]
- 4d.Takashima K, Noritsugu T, Rossiter J, Guo S, Mukai T. J. Rob. Mech. 2012;24 [Google Scholar]
- 4e.Voit W, Ware T, Dasari RR, Smith P, Danz L, Simon D, Barlow S, Marder SR, Gall K. Adv. Mater. 2010;20 [Google Scholar]
- 5a.Armand M, Endres F, MacFarlane DR, Ohno H, Scrosati B. Nat. Mater. 2009;8:621. doi: 10.1038/nmat2448. [DOI] [PubMed] [Google Scholar]
- 5b.Jaeger EWH, Smela E, Inganäs O. Science. 2000;290 doi: 10.1126/science.290.5496.1540. [DOI] [PubMed] [Google Scholar]
- 5c.Pugal D, Jung K, Aabloo A, Kim KJ. Polym. Int. 2010;59 [Google Scholar]
- 5d.Zheng W, Razal JM, Whitten PG, Ovalle-Robles R, Wallace GG, Baughman RH, Spinks GM. Adv. Mater. 2011;23 doi: 10.1002/adma.201100512. [DOI] [PubMed] [Google Scholar]
- 5e.Otero TF, Martinez JG, Arias-Pardilla J. Electrochimica Acta. 2012;84 [Google Scholar]
- 6.Glazer PJA, van Erp M, Embrechts A, Lemay SG, Mendes E. Soft Matter. 2012;8:4421. [Google Scholar]
- 7a.Zhang QM, Bharti V, Zhao X. Science. 1998;280:2101. doi: 10.1126/science.280.5372.2101. [DOI] [PubMed] [Google Scholar]
- 7b.Pelrine R, Kornbluh R, Pei Q, Joseph J. Science. 2000;287 doi: 10.1126/science.287.5454.836. [DOI] [PubMed] [Google Scholar]
- 7c.Carpi F, Bauer S, De Rossi D. Science. 2010;330 doi: 10.1126/science.1194773. [DOI] [PubMed] [Google Scholar]
- 8.Foroughi J, Spinks GM, Wallace GG, Oh J, Kozlov ME, Fang S, Mirfakhrai T, Madden JDW, Shon Mk, Kim SJ, Baughman RH. Science. 2011;334:494. doi: 10.1126/science.1211220. [DOI] [PubMed] [Google Scholar]
- 9a.Ilievski F, Mazzeo AD, Shepherd RF, Chen X, Whitesides GM. Angew. Chem. Int. Ed. 2011;50:1890. doi: 10.1002/anie.201006464. [DOI] [PubMed] [Google Scholar]
- 9b.Shepherd RF, Ilievski F, Choi W, Morin SA, Stokes AA, Mazzeo AD, Chen X, Wang M, Whitesides GM. Proc. Natl. Acad. Sci. USA. 2011;108 doi: 10.1073/pnas.1116564108. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9c.Martinez RV, Branch JL, Fish CR, Jin L, Shepherd RF, Nunes RMD, Suo Z, Whitesides GM. Adv. Mater. 2013;25 doi: 10.1002/adma.201203002. [DOI] [PubMed] [Google Scholar]
- 9d.Shepherd RF, Stokes AA, Freake J, Barber J, Snyder PW, Mazzeo AD, Cademartiri L, Morin SA, Whitesides GM. Angew. Chem. Int. Ed. 2013;52 doi: 10.1002/anie.201209540. [DOI] [PubMed] [Google Scholar]
- 10a.Kofod G, Paajanen M, Bauer S. Appl. Phys. A. 2006;85:141. [Google Scholar]
- 10b.Kofod G, Wirges W, Paajanen M, Bauer S. Appl. Phys. Lett. 2007;90 [Google Scholar]
- 11a.Paik JK, Kramer RK, Wood RJ. IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, USA: 2011. pp. 414–420. presented at, September 25–30, [Google Scholar]
- 11b.Zhang X, Pint CL, Hyung Lee M, Schubert BE, Jamshidi A, Takei K, Ko H, Gillies A, Bardhan R, Urban JJ, Wu M, Fearing R, Javey A. Nano Lett. 2011;11 doi: 10.1021/nl201503e. [DOI] [PubMed] [Google Scholar]
- 12a.Zhao X, Suo Z. Appl. Phys. Lett. 2008;93:251902. [Google Scholar]
- 12b.Suo Z, Zhao X, Greene WH. J. Phys. Mech. Sol. 2008;56 [Google Scholar]
- 13.Brown E, Rodenberg N, Amend J, Mozeika A, Steltz E, Zakin MR, Lipson H, Jaeger HM. Proc. Natl. Acad. Sci. USA. 2010;107:18809. [Google Scholar]
- 14.Martinez RV, Fish CR, Chen X, Whitesides GM. Adv. Funct. Mater. 2012;22:1376. [Google Scholar]
- 15a.Shankar R, Ghosh TK, Spontak RJ. Soft Matter. 2007;3:1116. doi: 10.1039/b705737g. [DOI] [PubMed] [Google Scholar]
- 15b.Brochu P, Pei Q. Macromol. Rapid Commun. 2010;31 doi: 10.1002/marc.200900425. [DOI] [PubMed] [Google Scholar]
- 15c.Anderson IA, Gisby TA, McKay TG, O’Brien BM, Calius EP. J. Appl. Phys. 2012;112 [Google Scholar]
- 16.Rosset S, Shea HR. Appl. Phys. A. 2013;110:281. [Google Scholar]
- 17a.Keplinger C, Li T, Baumgartner R, Suo Z, Bauer S. Soft Matter. 2012;8:285. [Google Scholar]
- 17b.Li T, Keplinger C, Baumgartner R, Bauer S, Yang W, Suo Z. J. Mech. Phys. Sol. 2013;61 [Google Scholar]
- 17c.Conn AT, Rossiter J. Appl. Phys. Lett. 2012;101 [Google Scholar]
- 17d.Huang J, Li T, Foo CC, Zhu J, Clarke DR, Suo Z. Appl. Phys. Lett. 2012;100 [Google Scholar]
- 18a.Niu X, Yang X, Brochu P, Stoyanov H, Yun S, Yu Z, Pei Q. Adv. Mater. 2012;24:6513. doi: 10.1002/adma.201202876. [DOI] [PubMed] [Google Scholar]
- 18b.Yun S, Niu X, Yu Z, Hu W, Brochu P, Pei Q. Adv. Mater. 2012;24 doi: 10.1002/adma.201104101. [DOI] [PubMed] [Google Scholar]
- 19a.Akbari S, Rosset S, Shea HR. Appl. Phys. Lett. 2013;102:071906. [Google Scholar]
- 19b.Stoyanov H, Brochu P, Niu X, Lai C, Yun S, Pei Q. RSC Advances. 2013;3 [Google Scholar]
- 19c.Kussmaul B, Risse S, Wegener M, Bluemke M, Krause J, Wagner J, Feller T, Clauberg K, Hitzlbeck J, Gerhard R. Proc. SPIE (EAPAD) 2013;8687 [Google Scholar]
- 20a.Bozlar M, Punckt C, Korkut S, Zhu J, Foo CC, Suo Z, Aksay IA. Appl. Phys. Lett. 2012;101:091907. [Google Scholar]
- 20b.Michel S, Chu BTT, Grimm S, Nüesch FA, Borgschulte A, Opris DM. J. Mater. Chem. 2012;22 [Google Scholar]
- 20c.Mineart KP, Lin Y, Desai SC, Krishnan AS, Spontak RJ, Dickey MD. Soft Matter. 2013;9 [Google Scholar]
- 21a.Nathan A, Ahnood A, Cole MT, Lee S, Suzuki Y, Hiralal P, Bonaccorso F, Hasan T, Garcia-Gancedo L, Dyadyusha A, Haque S, Andrew P, Hofmann S, Moultrie J, Chu D, Flewitt AJ, Ferrari AC, Kelly MJ, Robertson J, Amaratunga GAJ, Milne WI. Proc. IEEE. 2012;100:1485. [Google Scholar]
- 21b.Hammock ML, Chortos A, Tee BC-K, Tok JB-H, Bao Z. Adv. Mater. 2013 doi: 10.1002/adma.201302240. . early view. [DOI] [PubMed] [Google Scholar]
- 22a.Rogers JA, Someya T, Huang Y. Science. 2010;327:1603. doi: 10.1126/science.1182383. [DOI] [PubMed] [Google Scholar]
- 22b.Wagner S, Bauer S. MRS Bull. 2012;37 [Google Scholar]
- 22c.Suo Z. MRS Bull. 2012;37 [Google Scholar]
- 22d.Kim D-H, Lu N, Huang Y, Rogers JA. MRS Bull. 2012;37 [Google Scholar]
- 22e.Sekitani T, Someya T. MRS Bull. 2012;37 [Google Scholar]
- 22f.Kornbluh RD, Pelrine R, Prahlad H, Wong-Foy A, McCoy B, Kim S, Eckerle J, Low T. MRS Bull. 2012;37 [Google Scholar]
- 22g.Vanfleteren J, Gonzalez M, Bossuyt F, Hsu Y-Y, Vervust T, De Wolf I, Jablonski M. MRS Bull. 2012;37 [Google Scholar]
- 23a.Sekitani T, Zschieschang U, Klauk H, Someya T. Nat. Mater. 2010;9:1015. doi: 10.1038/nmat2896. [DOI] [PubMed] [Google Scholar]
- 23b.Kaltenbrunner M, Sekitani T, Reeder J, Yokota T, Kuribara K, Tokuhara T, Drack M, Schwödiauer R, Graz I, Bauer-Gogonea S, Bauer S, Someya T. Nature. 2013;499 doi: 10.1038/nature12314. [DOI] [PubMed] [Google Scholar]
- 23c.Khodagholy D, Rivnay J, Sessolo M, Gurfinkel M, Leleux P, Jimison LH, Stavrinidou E, Herve T, Sanaur S, Owens RM, Malliaras GG. Nat. Commun. 2013;4 doi: 10.1038/ncomms3133. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 24a.Kim D-H, Lu N, Ma R, Kim Y-S, Kim R-H, Wang S, Wu J, Won SM, Tao H, Islam A, Yu KJ, Kim T-il, Chowdbury R, Ying M, Xu L, Li M, Chung H-Y, Keum H, McCormick M, Liu P, Zhang Y-W, Omenetto FG, Huang Y, Coleman T, Rogers JA. Science. 2011;333:838. doi: 10.1126/science.1206157. [DOI] [PubMed] [Google Scholar]
- 24b.Yeo W-H, Kim Y-S, Lee J, Ameen A, Shi L, Li M, Wang S, Ma R, Jin SH, Kang Z, Huang Y, Rogers JA. Adv. Mater. 2013;25 doi: 10.1002/adma.201204426. [DOI] [PubMed] [Google Scholar]
- 25.Shahrjerdi D, Bedell SW. Nano Lett. 2013;13:315. doi: 10.1021/nl304310x. [DOI] [PubMed] [Google Scholar]
- 26.Kim R-H, Kim D-H, Xiao J, Kim BH, Park S-Il, Panilaitis B, Ghaffari R, Yao J, Li M, Liu Z, Malyarchuk V, Kim DG, Le A-P, Nuzzo RG, Kaplan DL, Omenetto FG, Huang Y, Kang Z, Rogers JA. Nat. Mater. 2010;9:929. doi: 10.1038/nmat2879. [DOI] [PubMed] [Google Scholar]
- 27.Yu Z, Niu X, Liu Z, Pei Q. Adv. Mater. 2011;23:3989. doi: 10.1002/adma.201101986. [DOI] [PubMed] [Google Scholar]
- 28.White MS, Kaltenbrunner M, Glowacki ED, Gutnichenko K, Kettlgruber G, Graz I, Aazou S, Ulbricht C, Egbe DAM, Miron MC, Major Z, Scharber MC, Sekitani T, Someya T, Bauer S, Sariciftci NS. Nat. Photon. 2013;7:811. [Google Scholar]
- 29.Lee J, Wu J, Shi M, Yoon J, Park S-Il, Li M, Liu Z, Huang Y, Rogers JA. Adv. Mater. 2011;23:986. doi: 10.1002/adma.201003961. [DOI] [PubMed] [Google Scholar]
- 30a.Lipomi DJ, Tee BC-K, Vosgueritchian M, Bao Z. Adv. Mater. 2011;23:1771. doi: 10.1002/adma.201004426. [DOI] [PubMed] [Google Scholar]
- 30b.Lipomi DJ, Bao Z. Energy Environ. Sci. 2011;4 [Google Scholar]
- 31a.Kaltenbrunner M, White MS, Glowacki ED, Sekitani T, Someya T, Sariciftci NS, Bauer S. Nat. Commun. 2012;3:770. doi: 10.1038/ncomms1772. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 31b.Kaltenbrunner M, White MS, Sekitani T, Sariciftci NS, Bauer S, Someya T. IEEE Photonics J. 2013;5 [Google Scholar]
- 32a.Virkar AA, Mannsfeld S, Bao Z, Stingelin N. Adv. Mater. 2010;22:3857. doi: 10.1002/adma.200903193. [DOI] [PubMed] [Google Scholar]
- 32b.Natali D, Caironi M. Adv. Mater. 2012;24 doi: 10.1002/adma.201104206. [DOI] [PubMed] [Google Scholar]
- 32c.Bobbert PA, Sharma A, Mathijssen SGJ, Kemerink M, de Leeuw D. Adv. Mater. 2012;24 doi: 10.1002/adma.201104580. [DOI] [PubMed] [Google Scholar]
- 32d.Kola S, Sinha J, Katz HE. J. Polym. Sci. B: Polym. Phys. 2012;50 [Google Scholar]
- 32e.Kang B, Lee WH, Cho K. ACS Appl. Mater. Interfaces. 2013;5 doi: 10.1021/am302796z. [DOI] [PubMed] [Google Scholar]
- 32f.Di C, Zhang F, Zhu D. Adv. Mater. 2013;25 doi: 10.1002/adma.201201502. [DOI] [PubMed] [Google Scholar]
- 32g.Baeg KJ, Caironi M, Noh Y-Y. Adv. Mater. 2013;25 doi: 10.1002/adma.201204979. [DOI] [PubMed] [Google Scholar]
- 33a.Kuribara K, Wang H, Uchiyama N, Fukuda K, Yokota T, Zschieschang U, Jaye C, Fischer D, Klauk H, Yamamoto T, Takimiya K, Ikeda M, Kuwabara H, Sekitani T, Loo Y-L, Someya T. Nat. Commun. 2012;3:723. doi: 10.1038/ncomms1721. [DOI] [PubMed] [Google Scholar]
- 33b.Yokota T, Kuribara K, Tokuhara T, Zschieschang U, Klauk H, Takimiya K, Sadamitsu Y, Hamada M, Sekitani T, Someya T. Adv. Mater. 2013;25 doi: 10.1002/adma.201300941. [DOI] [PubMed] [Google Scholar]
- 33c.Yi HT, Payne MC, Anthony JE, Pozdorov V. Nat. Commun. 2012;3 doi: 10.1038/ncomms2263. [DOI] [PubMed] [Google Scholar]
- 34.Facchetti A, Yoon MH, Marks TJ. Adv. Mater. 2005;17:1705. [Google Scholar]
- 35a.Mardare AI, Kaltenbrunner M, Sariciftci NS, Bauer S, Hassel AW. Phys. Status Solidi a. 2012;209:813. [Google Scholar]
- 35b.Kaltenbrunner M, Stadler P, Schwödiauer R, Hassel AW, Sariciftci NS, Bauer S. Adv. Mater. 2011;23 doi: 10.1002/adma.201103189. [DOI] [PubMed] [Google Scholar]
- 36a.Bettinger CJ, Bao Z. Adv. Mater. 2010;22:651. doi: 10.1002/adma.200902322. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 36b.Kim DH, Viventi J, Amsden JJ, Xiao J, Vigeland L, Kim YS, Blanco JA, Panilaitis B, Frechette ES, Contreras D, Kaplan DL, Omenetto FG, Huang Y, Hwang KC, Zakin MR, Litt B, Rogers JA. Nat. Mater. 2010;9 doi: 10.1038/nmat2745. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 36c.Irimia-Vladu M, Troshin PA, Reisinger M, Shmygleva L, Kanbur Y, Schwabegger G, Bodea M, Schwödiauer R, Mumyatov A, Fergus JW, Razumov VF, Sitter H, Sariciftci NS, Bauer S. Adv. Funct. Mater. 2010;20 [Google Scholar]
- 37a.Hwang S-K, Tao H, Kim D-H, Cheng H, Song J-K, Rill E, Brenckle MA, Panilaitis B, Won SM, Kim Y-S, Song YM, Yu KJ, Ameen A, Li R, Su Y, Yang M, Kaplan DL, Zakin MR, Slepian MJ, Huang Y, Omenetto FG, Rogers JA. Science. 2012;337:1640. doi: 10.1126/science.1226325. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 37b.Hwang S-W, Kim D-H, Tao H, Kim T-il, Kim S, Yu KJ, Panilaitis B, Jeong J-W, Song J-K-, Omenetto FG, Rogers JA. Adv. Funct. Mater. 2013;23 [Google Scholar]
- 38.Meredith P, Bettinger CJ, Irimia-Vladu M, Mostert AB, Schwenn PE. Rep. Prog. Phys. 2013;76:034501. doi: 10.1088/0034-4885/76/3/034501. [DOI] [PubMed] [Google Scholar]
- 39a.Irimia-Vladu M, Glowacki ED, Troshin PA, Susarova DK, Krystal O, Schwabegger G, Ullah M, Kanbur Y, Bodea MA, Razumov VF, Sitter H, Bauer S, Sariciftci NS. Adv. Mater. 2012;24:375. doi: 10.1002/adma.201102619. [DOI] [PubMed] [Google Scholar]
- 39b.Glowacki ED, Irimia-Vladu M, Kaltenbrunner M, Gasiorowski J, White MS, Romanazzi G, Suranna GP, Mastrorilli P, Sekitani T, Bauer S, Someya T, Torsi L, Sariciftci NS. Adv. Mater. 2013;25 doi: 10.1002/adma.201204039. [DOI] [PubMed] [Google Scholar]
- 40a.Khodagholy D, Doublet T, Quilichini P, Gurfinkel M, Leleux P, Ghestem A, Ismailova E, Herve T, Sanaur S, Bernard C, Malliaras GG. Nat. Commun. 2013;4:1575. doi: 10.1038/ncomms2573. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 40b.Minev IR, Chew DJ, Delivopoulos E, Fawcett JW, Lacour SP. J. Neural Engin. 2012;9 doi: 10.1088/1741-2560/9/2/026005. [DOI] [PubMed] [Google Scholar]
- 40c.Graudejus O, Morrison B, III, Goletiani C, Yu Z, Wagner S. Adv. Funct. Mater. 2012;22 doi: 10.1002/adfm.201102290. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 40d.Kim D-H, Viventi J, Amsden JJ, Xiao J, Vigeland L, Kim Y-S, Blanco JA, Panilaitis B, Frechette ES, Contreras D, Kaplan DL, Omenetto FG, Huang Y, Hwang K-C, Zakin MR, Litt B, Rogers JA. Nat. Mater. 2010;9 doi: 10.1038/nmat2745. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 41.Jorgensen M, Norrman K, Gevorgyan SA, Tromholt T, Andreasen B, Krebs FC. Adv. Mater. 2012;24:580. doi: 10.1002/adma.201104187. [DOI] [PubMed] [Google Scholar]
- 42.Xu J, Guo Z. J. Colloid Interface Sci. 2013;406:1. doi: 10.1016/j.jcis.2013.05.028. [DOI] [PubMed] [Google Scholar]
- 43.Haque MdA, Kurokawa T, Kamita G, Yue Y, Gong JP. Chem. Mater. 2011;23:5200. [Google Scholar]
- 44.Zhao Q, Haines A, Snoswell D, Keplinger C, Denk R, Kaltseis R, Graz I, Bauer S, Spahn P, Hellmann G, Baumberg J. Appl. Phys. Lett. 2012;100:101902. [Google Scholar]
- 45.van den Ende D, Kamminga J-D, Boersma A, Andritsch T, Steeneken PG. Adv. Mater. 2013;25:3438. doi: 10.1002/adma.201300459. [DOI] [PubMed] [Google Scholar]
- 46.Morin SA, Shepherd RF, Kwok SW, Stokes AA, Nemirowski A, Whitesides GM. Science. 2012;337:828. doi: 10.1126/science.1222149. [DOI] [PubMed] [Google Scholar]
- 47.Rossiter J, Yap B, Conn A. Bioinspir. Biomim. 2012;7:036009. doi: 10.1088/1748-3182/7/3/036009. [DOI] [PubMed] [Google Scholar]
- 48a.Nishimoto S, Bhushan B. RSC Advances. 2013;3:671. [Google Scholar]
- 48b.Li XM, Reinhoudt D, Crego-Calama M. Chem. Soc. Rev. 2007;36 doi: 10.1039/b602486f. [DOI] [PubMed] [Google Scholar]
- 49a.Shivapooja P, Wang Q, Orihuela B, Rittschof D, Lopez GP, Zhao X. Adv. Mater. 2013;25:1430. doi: 10.1002/adma.201203374. [DOI] [PubMed] [Google Scholar]
- 49b.Wang Q, Tahir M, Zang J, Zhao X. Adv. Mater. 2012;24 doi: 10.1002/adma.201200272. [DOI] [PubMed] [Google Scholar]
- 50a.Wool RP. Soft Matter. 2008;4:400. doi: 10.1039/b711716g. [DOI] [PubMed] [Google Scholar]
- 50b.Wu DY, Meure S, Solomon D. Prog. Polym. Sci. 2008;33 [Google Scholar]
- 50c.Hager MD, Greil P, Leyens C, van der Zwaag S, Schubert US. Adv. Mater. 2010;22 doi: 10.1002/adma.201003036. [DOI] [PubMed] [Google Scholar]
- 51.Zang J, Ryu S, Pugno N, Wang Q, Tu Q, Buehler MJ, Zhao X. Nat. Mater. 2013;12:321. doi: 10.1038/nmat3542. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 52a.Mynar JL, Aida T. Nature. 2008;451:895. doi: 10.1038/451895a. [DOI] [PubMed] [Google Scholar]
- 52b.Cordier P, Tournilhac F, Soulie-Ziakovic C, Leibler L. Nature. 2008;451 doi: 10.1038/nature06669. [DOI] [PubMed] [Google Scholar]
- 53a.Tee BC-K, Wang C, Allen R, Bao Z. Nat. Nanotechnol. 2012;7:825. doi: 10.1038/nnano.2012.192. [DOI] [PubMed] [Google Scholar]
- 53b.Gong C, Liang J, Hu W, Niu X, Ma S, Hahn HT, Pei Q. Adv. Mater. 2013;30 doi: 10.1002/adma.201301069. [DOI] [PubMed] [Google Scholar]
- 54.Land MF, Nilsson DF. Animal Eyes. Oxford, UK: Oxford Univ. Press; 2012. [Google Scholar]
- 55a.Carpi F, Frediani G, Turco S, De Rossi D. Adv. Funct. Mater. 2011;21:4152. [Google Scholar]
- 55b.Keplinger C, Kaltenbrunner M, Arnold N, Bauer S. Proc. Natl. Acad. Sci. USA. 2010;107 doi: 10.1073/pnas.0913461107. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 56a.Jung I, Xiao J, Malyarchuk V, Lu C, Li M, Liu Z, Yoon J, Huang Y, Rogers JA. Proc. Natl. Acad. Sci. USA. 2011;108:1788. doi: 10.1073/pnas.1015440108. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 56b.Song YM, Xie Y, Malyarchuk V, Xiao J, Jung I, Choi K-J, Liu Z, Park H, Lu C, Kim R-H, Li R, Crozier KB, Huang Y, Rogers JA. Nature. 2013;497 doi: 10.1038/nature12083. [DOI] [PubMed] [Google Scholar]
- 57a. http://www.optotune.com/ (last accessed October 2013);
- 57b. http://www.tag-optics.com/ (last accessed October 2013)
- 58.Kaltenbrunner M, Bauer S. Chapter 12. In: Someya T, editor. Stretchable Electronics. Weinheim: Wiley VCH; 2013. [Google Scholar]
- 59a.Kaltenbrunner M, Kettlgruber G, Siket C, Schwödiauer R, Bauer S. Adv. Mater. 2010;22:2065. doi: 10.1002/adma.200904068. [DOI] [PubMed] [Google Scholar]
- 59b.Kettlgruber G, Kaltenbrunner M, Siket CM, Moser R, Graz IM, Schwödiauer R, Bauer S. J. Mater. Chem. A. 2013;1 [Google Scholar]
- 60.Gaikwad AM, Zamarayeva AM, Rousseau J, Chu H, Derin I, Steingart DA. Adv. Mater. 2012;24:5071. doi: 10.1002/adma.201201329. [DOI] [PubMed] [Google Scholar]
- 61.Xu S, Zhang Y, Cho J, Lee J, Huang X, Jia L, Fan JA, Su Y, Su J, Zhang H, Cheng H, Lu B, Yu C, Chuang C, Kim T-il, Song T, Shigeta K, Kang S, Dagdeviren C, Petrov I, Braun PV, Huang Y, Paik U, Rogers JA. Nat. Commun. 2013;4:1543. doi: 10.1038/ncomms2553. [DOI] [PubMed] [Google Scholar]
- 62.Sun K, Wei T-S, Ahn BY, Seo JY, Dillon SJ, Lewis JA. Adv. Mater. 2013;25:4539. doi: 10.1002/adma.201301036. [DOI] [PubMed] [Google Scholar]
- 63. http://www.pelamiswave.com (last accessed October 2013)
- 64.Jean P, Wattez A, Ardoise G. Proc. SPIE. 2012;8340:83400C. [Google Scholar]
- 65.McKay TG, O’Brien BM, Calius EP, Anderson IA. Appl. Phys. Lett. 2011;98:142903. [Google Scholar]
- 66a.S JAKoh, Zhao XH, Suo ZG. Appl. Phys. Lett. 2009;94:262902. [Google Scholar]
- 66b.Koh SJA, Keplinger C, Li T, Bauer S, Suo Z. IEEE/ASME Trans. Mechatronics. 2011;16 [Google Scholar]
- 67a.Kaltseis R, Keplinger C, Baumgartner R, Kaltenbrunner M, Li T, Mächler P, Schwödiauer R, Suo Z, Bauer S. Appl. Phys. Lett. 2011;99:162904. [Google Scholar]
- 67b.Huang J, Shian S, Suo Z, Clarke DR. Adv. Funct. Mater. 2013;23 [Google Scholar]