
Figure 1.
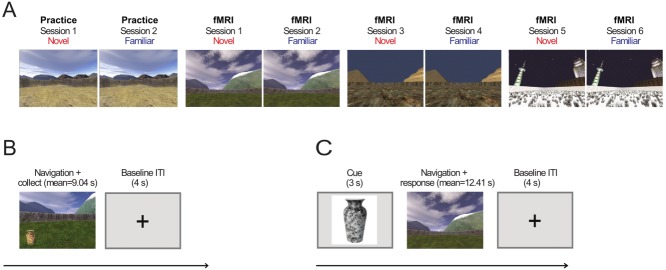
Experimental Structure. A: Experimental environments shown from the participants' (first-person) perspective. Four different environments are presented in eight experimental sessions. The first two sessions (always the desert environments) provided practice outside of the scanner. Sessions 3–8 contained three novel-familiar environment repetitions with environment order, counterbalanced across participants. B: Learning phase trial structure. During learning trials, participants use a button box to navigate and “collect” three novel and three familiar (previously presented) objects (vase shown as example) four times each (a total of 24 trials per session). C: The object replacement phase, trial structure. After being cued for 3 s with a picture of an object that had been collected in the learning phase of the current session, participants were placed back in the environment and had to navigate to where they thought the object (object replacement) had been located during that learning period. [Color figure can be viewed in the online issue, which is available at wileyonlinelibrary.com.]