

Abstract
Goals fall into two broad types – approach and avoidance. Research on infants’ early goal understanding has focused only on approach goals, usually assuming that infants will encode an ambiguous display where an actor picks one object over another as the actor wanting to approach the former rather than avoid the latter. We investigated infants’ understanding of approach and avoidance separately by presenting 7-month-olds with a hand either consistently approaching, or consistently avoiding, an object. Infants dishabituated to a disruption of the consistent approach pattern, but not of the consistent avoidance pattern. In the second experiment, we show that 14-month-olds, who have a richer understanding of goals, still do not dishabituate when a hand first reaches to and picks up an object it has consistently avoided before. A third experiment found that 7-month-olds successfully dishabituated to the first motion of a previously stationary object when all the objects moved on their own with no hand present, ruling out several low-level interpretations of infants’ failure to dishabituate to the violations of the avoidance pattern in Experiments 1 and 2. We conclude that infants do not represent avoidance from the same type of evidence they can use to represent approach.
Keywords: goal attribution, theory of mind, negativity bias, omission effect, infant cognition
Convergent research indicates that young infants, even neonates, create representations of agents and attribute intentions to their actions (e.g. Senju & Csibra, 2008; Sommerville, Woodward & Needham 2005; Woodward, 1998; Luo & Johnson, 2009; Gergeley & Csibra, 2003; Onishi & Baillargeon, 2005; Senju, Southgate, Snape, Leonard, & Csibra, 2011; see Baillargeon, Scott, He, Sloane, Setoh, Jin, Wu, & Bian, 2014 for a review). Much less is understood, however, about the form those representations take and how they are computed.
Consider a paradigm introduced by Woodward (1998) to investigate infants’ representations of goals. In this paradigm infants are habituated to an experimenter repeatedly reaching for and touching one of two objects (e.g. a ball over a bear). On the critical test trials that follow, the two objects switch locations and the experimenter reaches again, either for the same target (the ball contacted during habituation, which is now in a new location) or for the same location (the bear that the experimenter had never before touched, now sitting in the location where the experimenter had formerly reached). Infants dishabituate to a reach to the new object in the old location, but not to a reach for the old object in a new location. This paradigm has been extended to displays where the agent picks up the object (Phillips, Wellman & Spelke, 2002; Sodian & Thoermer, 2004), and ones where the entire agent approaches the object rather than reaching for it (Hernik & Southgate, 2012; Lakusta, Wagner, O’Hearn, & Landau 2007). In all of these cases, experimenters concluded that infants’ intentional construal of the event was of the agent fulfilling its goal to contact the object. More recently, these and other manipulations have also been interpreted as providing information to the child that the agent has a positive disposition toward the approached object, which in turn leads to the prediction that the agent will approach the object in the future (Baillargeon, et al., 2014).
There is, however, another possibility. When an agent consistently chooses a ball over a bear, this action is consistent not only with the agent having a goal to obtain the ball, but also with the agent not having a goal to obtain the bear, or with a goal to avoid it. Either of these representations alone would be sufficient to explain dishabituation in the Woodward paradigm, and neither is mutually exclusive with the standard interpretation: Infants might represent goals alongside non-goals, or approach alongside avoidance. This ambiguity is present in the account where infants represent agents as having a particular disposition towards an object as well. Not only is the Woodward paradigm ambiguous with respect to the evidence the child uses to establish the agent’s disposition (approach to one object or avoidance of the other), it is also ambiguous with respect to which attributed disposition underlies the child’s attention to the unexpected event (attributing to the agent a positive disposition toward the approached object or a negative disposition toward the avoided object).
Although these alternative possibilities have not received much attention, a number of considerations lend them some plausibility. From an evolutionary perspective, avoiding is often more critical for survival than approaching –a single encounter with a predator could well be deadly. Representing, noticing and learning from others’ avoidance goals are therefore likely to be important for young humans, as for other animals. Furthermore, recent work on a negativity bias in both adults’ and infants’ processing of valenced information suggests infants do attend to negative information. Three-month-old infants prefer neutral over antisocial agents, but not prosocial over neutral agents (Hamlin, Wynn, & Bloom, 2010). Studies of social referencing show that infants generally modify their own behavior more in response to negative than to positive affective information from their caregivers (see Vaish, Grossman, & Woodward, 2008, for a review). Twelve-month-old infants faced with an ambiguous new toy play with it less if their caregiver looks disgusted rather than neutral, but do not play with it more if the caregiver emotes positively, rather than neutrally, towards the toy (Hornik, Risenhoover, & Gunnar, 1987).
Additionally, a number of other studies test infants’ sensitivity to others’ positive and negative emotions and preferences, by providing both kinds of information within the same condition. These studies indicate infants’ sensitivity to valenced intentional information, even if they do not allow us to compare positive to negative directly. Thus, by 18 months, infants will give an agent an object she emoted positively rather than negatively towards, (Egyed, Király, & Gergely, 2013), match the food preference of a prosocial or novel agent who indicated liking one food and disliking another (but not of an antisocial agent; Hamlin & Wynn, 2012), and override their own preference to give an agent a food that the agent has shown a preference rather than a dispreference for (Repacholi & Gopnik, 1997). This literature suggests that infants in the Woodward paradigm might indeed attend to the consistent avoidance, and perhaps even attend to it preferentially over a consistent approach, and might indeed attribute a negative disposition toward that object to the agent.
Most studies using the Woodward paradigm are ambiguous on this point, because every trial with a persistently reached-for object has always included a persistently not-reached for object. Some relevant evidence comes from studies where the habituation display involves only one object that is consistently approached. If an agent simply approaches a single object along a straight path, as in the Woodward paradigm, infants do not expect the agent to continue approaching that object (Luo and Baillargeon, 2005). However, when the agent approaches the object by taking an efficient path around an obstacle, infants successfully predict an approach to the same object during test (e.g. Biro, Verschoor, & Coenen, 2011; Hernik & Southgate, 2012). These studies indicate that infants can represent a consistent approach, since there is no consistent avoidance during habituation. However, they do not bear on the question of whether infants also represent avoidance given evidence consistent with both avoidance and approach, as in the canonical and widely-used Woodward paradigm.
The present study addresses this ambiguity through a modification of the original Woodward paradigm. As in the original, two objects are present during habituation. But, while one of the objects stays the same across all trials, the other object’s identity changes on every trial. Infants see one of two habituation displays: either a consistent reach to the same fixed object (the Approach condition), or a consistent reach to the always-novel, variable object and, therefore, a consistent avoidance of the fixed object (the Avoidance condition). The Approach and Avoidance conditions each provide equivalent evidence for an approach goal or an avoidance goal, as well as for a positive or a negative disposition toward the fixed object, respectively.
If infants only require that one fixed reached-for object be paired with a foil in order to establish that the agent has the goal of contacting that fixed object, then they should succeed at the Approach condition. Similarly, if infants need only one unreached-for fixed object and a foil to establish that the agent has the goal of avoiding or of not picking up the fixed object, they should succeed at the Avoidance condition. If infants succeed in both of these conditions, that would suggest that imputing positive and negative valences, goals to approach and goals to avoid, are equally available to young infants as they make sense of the events in the basic Woodward paradigm. We begin our investigation with 7-month-old infants, who have been shown to succeed robustly in multiple versions of the basic Woodward paradigm (Woodward, 1998; Luo & Baillargeon, 2005; Luo & Johnson, 2009).
Experiment 1
Method
Participants
Sixteen full-term infants participated in the Approach condition (mean age 7;3, range 6;15-7;15, 11 female) and another 16 in the Avoidance condition (mean age 7;1, range 6;15-7;15, 10 female). One other infant was excluded from analysis and subsequently replaced due to fussiness, and another one due to parental interference.
Stimuli
Up to 19 objects were used for each infant: one “fixed” object present on every trial and 18 “variable” objects each used on one trial only. The identity of the fixed object was varied across participants. The objects were similarly sized, but differed in material, texture, color, shape and semantic category. They included, for example, a small section of a wooden branch, a rubber duck, a plastic carrot, a shoe brush, and a jewelry box.
Setup
Infants sat on a parent’s right knee about 90 centimeters from a stage surrounded by black curtains. Parents were instructed to close their eyes throughout the experiment and not to direct the infant’s attention. The stage had exits on each side with black curtains shielding the experimenters from view. A black plank spanned the width of the stage, extending out of both side exits. This plank had strips of velcro attached, corresponding to the three locations where objects could be placed. Objects, each with a strip of velcro underneath to keep them from rolling off or from wiggling relative to the plank as it was moved, were placed on the sliding plank and shuttled to one side or the other such that the fixed object and one variable object were in view on each trial (see Fig. 1).
Fig. 1.
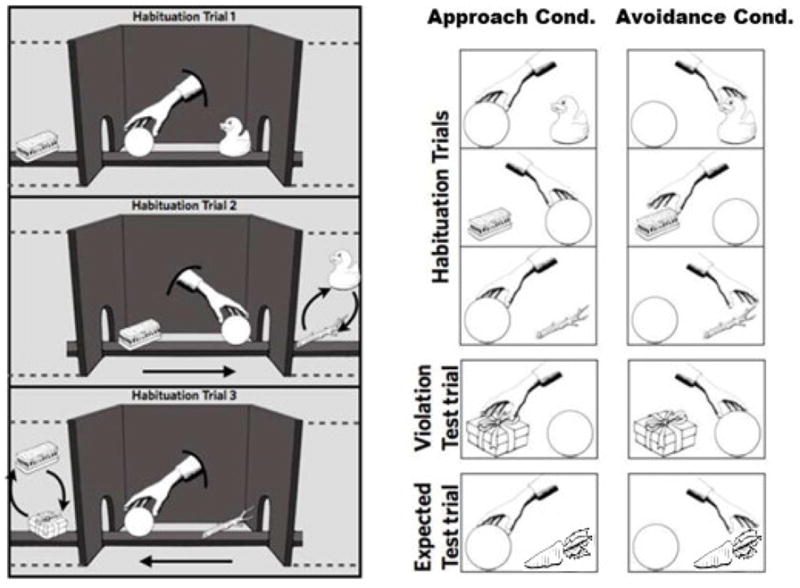
The stage setup (left) allows for a single fixed object to be shuttled from one side of the stage to the other via the sliding bar on which it is placed. The variable objects are switched after they are shuttled off stage and out of sight of the infant. The procedure, illustrating the pattern of alternating reaches (right) is shown only for the Approach condition, although all conditions involved the same alternation of positions for the fixed and variable objects. In the Approach condition, the hand always reaches for the ball during habituation. On the first test trial, it reaches for a novel object (and breaks the alternation) for the first time. This first test trial always violated expectation.
A camera behind the infant recorded events on stage, while another hidden in the stage curtains recorded the infant’s gaze. Two trained coders in another room (hence blind to condition) recorded infants’ looking times. A primary coder’s input determined the end of a trial. Average percent agreement on all trials was 94.1 for Experiment 1, reflecting the proportion of 100 ms time segments during which both coders agreed about whether the baby was looking at the display.
Procedure
Both conditions consisted of a habituation phase followed by a test phase. Habituation lasted until the infant’s looking time on three consecutive trials was less than half that for the first three trials, with a maximum of 14 habituation trials. This habituation phase was followed by four test trials. In the first and third test trials the hand reached to the unexpected object, while the second and fourth trials maintained the pattern of reaching established during habituation. All trials began when the infant looked onstage for at least 0.5 seconds and ended when the infant looked offstage for at least 2 seconds.
In the Approach condition, all habituation trials consisted of a hand emerging from the back stage curtain, reaching for the fixed object, picking it up and shaking it in the air until the end of the trial before replacing it and retreating behind the curtain. Avoidance condition habituation trials consisted of an identical action performed on the variable object. No curtain or barrier was used to block view of the stage between trials.
The variable object was swapped off-stage between each trial. The fixed object sat at the center of the plank and remained in full view of the infant throughout the experiment. Variable objects were placed on either side of the fixed object and shuttled on- and off-stage on the plank. When a new variable object was shuttled onstage from the right, the old variable object exited to the left, and vice-versa. Once off-stage the old variable object was replaced with a new one. Thus, the relative location of the fixed and variable object (right stage versus left stage) alternated on every habituation trial, as did the direction of the hand’s reach (see Fig. 1).
In both conditions, the first test trial was always an unexpected trial, in which the hand reached for the variable object in the Approach condition and the fixed object in the Avoidance condition. This broke the left-right alternation of reaches. However, because the pattern of alternation was established identically and broken identically across both conditions, differential patterns of dishabituation between them cannot be attributed to the sequence of right stage versus left stage reaches.
Results
Habituation Trials
The first two panels of Figure 2 shows the looking times during the first three habituation trials, the last three, plus the violation and expected test trials of the Approach and Avoidance conditions of Experiment 1. Infants habituated similarly in both conditions. Thirteen reached criterion in the Approach condition and 14 in the Avoidance condition. An ANOVA examined the effects of condition (Action vs. Avoidance) and habituation trial block (first 3 vs. last 3) on looking times during habituation. There was a main effect of habituation block, F(1,30) = 52.59, p < 0.0001, indicating that infants looked less over time (M first 3 = 19.52 seconds; M last 3 = 8.78 seconds. There was no main effect of condition, F(1,30) = 0.2, p = 0.66, nor did condition interact with habituation block, F(1,30) = 0.95, p = 0.34. Thus, infants entered the test trial phase in similar attentional states.
Fig. 2.

Results from both conditions of Experiment 1 and Experiments 2 and 3, showing looking time per trial averaged across participants. Error bars indicate 1 S.E. from the mean.
Test Trials
We excluded data when the difference between the violation and expected test trials exceeded 2 standard deviations from the mean difference across subjects, considering the first and second pairs of test trials separately. One pair of second test trials was excluded in each condition.
An analysis of variance examined the effects of the within-subject variables of trial type (Violation vs. Expected) and trial pair (first vs. second pair) and the between-subject variable of condition (Approach vs. Avoidance) on looking times during the test trials. Critically, this revealed an interaction between trial type and condition, F(1, 28) = 19.81, p < 0.001, indicating dishabituation to violation trials selectively in the Approach condition. This pattern was strongest for the first pair of test trials, leading to a significant three-way interaction between trial type, trial pair and condition F(1, 28) = 4.69, p = 0.04. Finally, a main effect of trial pair F(1, 28) = 10.85, p < 0.01 indicated that looking times were longer overall on the first pair of test trials. There were no other significant main effects or interactions.
Planned comparisons illuminate the source of the interaction between trial type and condition. The results of these comparisons and the associated parametric statistics are shown on Table 1.1
Table 1.
Differences between means of the average looking times on the trials indicated.
| Approach 7 month olds (Exp. 1a) | Avoidance 7 month olds (Exp. 1b) | Avoidance 14 month olds (Exp. 2) | Inherent Motion 7 month olds (Exp. 3) | |
|---|---|---|---|---|
| Violation 1 – Avg. of Last 3 Hab (n = 16) | 9.18 ** | −0.90 | 2.76 | 7.81 |
| t(15)=3.02 | t(15) = −0.48 | t(15) = 1 | t(15) = 1.56 | |
| d=0.95 | d=0.12 | d=0.26 | d=0.39 | |
| Violation 1 – Expected 1 (n = 16) | 8.43 ** | −5.73 † | 1.16 | 7.84 |
| t(15) = 3.78 | t(15) = −1.96 | t(15) = 0.32 | t(15) = 1.58 | |
| d=0.95 | d=0.49 | d=0.08 | d=0.40 | |
| Violation 2 – Expected 2 (n = 15) | 3.69 * | −0.94 | −2.95 | 10.71 † |
| t(14) = 2.31 | t(14) = −0.92 | t(14) = −0.76 | t(14) = 1.90 | |
| d=0.60 | d=0.24 | d=0.20 | d=0.49 | |
| Avg. Violation – Avg. Expected (n = 16) | 6.17 *** | −3.45 * | −0.34 | 9.45 ** |
| t(15) = 4.32 | t(15) = −2.49 | t(15) = −0.13 | t(15) = 3.52 | |
| d=1.08 | d=0.62 | d=0.03 | d=0.88 |
Significance was obtained from planned paired-sample t-test comparisons, 2-tailed.
p < .1;
p ≤.05;
p < .01,
p < .001.
d-values are point estimates of Cohen’s d measure of effect size.
In the Approach condition infants looked significantly longer at violation trials than expected trials, both for the first pair of test trials and for the second pair, indicating that they expected the hand to continue reaching for the fixed object. This conclusion is further supported by their longer looking on the first violation test trial than on to the last three habituation trials. However, in the Avoidance condition infants did not look longer at violation trials than expected trails; in fact they trended in the opposite direction. Nor did they recover interest to the first violation test trial relative to the last three habituation trials. Thus, infants in the Avoidance condition apparently failed to expect that the hand would continue not reaching for the fixed object. Nonparametric analyses confirmed these results. Fourteen out of 16 infants looked longer at the violation than the expected test trials in the Approach condition, which was significantly different from chance according to a Wilcoxon Signed Ranks Test (z = 2.99, N = 16, p < 0.01). In contrast, 4 out of 16 infants looked longer at the violation events in the Avoidance condition, which was also different from chance, but in the other direction (z = −2.17; N = 16, p = 0.03); that is, infants looked longer at the expected outcome.
Discussion
In the Approach condition infants expected a hand that consistently reached for one object to continue reaching for that object. In contrast to the basic Woodward paradigm, the setup of the Approach condition rules out the possibility that infants’ dishabituation depended upon encoding a consistent avoidance of one of the objects. Rather, consistent with previous interpretations, they apparently took the repeated approach to the fixed object as evidence for a positive disposition toward it, and encoded the fixed object as the hand’s goal, showing surprise when the hand approached, for the first time, one of the variable objects.
In contrast, infants in the Avoidance condition did not form an expectation that the hand’s goal was always the variable object, and never the fixed object, or did not attribute a negative disposition toward this object to the agent. In fact, in the Avoidance condition, infants looked longer at the first expected than the first violation trial. That is, they looked longer at the trials when the hand reached for a novel variable object, even though they had been habituated to the hand always reaching for the variable object rather than the fixed object (e.g., a ball). This counterintuitive result has a number of possible explanations. It may reflect a powerful tendency to impute approach goals to agents. Recall that the first expected trial always followed the first violation trial. Infants may be rapidly encoding the fixed object as a goal on the first test trial, when the hand reaches for the fixed object (e.g., the ball) for the first time. This reach towards the ball does not surprise infants, consistent with our interpretation that they had failed to encode the habituation trials as the agent avoiding the ball. Next, on the second test trial the hand reaches for some entirely new object, now avoiding the ball. For the first time in the experiment, infants are confronted with a non-reach to a previously reached-for object – the ball – that is still onstage. This may explain greater interest on the second and fourth test trials – the trials that would be “expected”, if infants represented the habituation events in the Avoidance condition as consistent avoidances, which apparently they did not. Alternatively, infants may have represented the identity of the object that is reached for on every trial, without forming a representation of the agent’s goal from a single trial. They may have learned a pattern: after an object is reached for, it is replaced. The first expected trial presents a violation of this pattern, which causes infants to dishabituate.
Experiment 2
Although 7-month-olds already have sophisticated representations of others’ intentional states, these representations continue to be greatly enriched throughout development. Between 9 and 15 months, infants increasingly show a capacity for joint attention and attention-following, among other skills (Carpenter, Nagel, & Tomasello, 1998). By 10 months, but not at 9, infants expect agents to look at another agent they are interacting with (Beier & Spelke, 2012). Representations of others’ goals in particular are enriched as well. By 12 months, but not at 7, infants interpret the direction of an agent’s gaze (Woodward, 2003) and pointing behavior (Woodward & Guajardo, 2002) as object-directed. Fourteen-month-olds, but not 10-month-olds, look predictively in anticipation of the outcomes of goal-directed reaching events in which objects were moved around, but not to similar hand movements with a closed fist (Gredebäck, Stasiewicz, Falck-Ytter, Rosander, & van Hofsten, 2009). Many other studies have not explicitly compared younger and older infants, but have reported abilities in 12–14 month-olds that have not been reported in infants any younger. Infants at these ages differentiate between an agent who is unwilling versus one who is unable to complete a goal-directed giving action (Behne, Carpenter, Call, & Tomasello, 2005) and, knowing two out of the three components of the teleological analysis of rational actions (environmental constraints, goals, means), infer the third (Gergely & Csibra, 2003).
Unlike older infants, 7-month-olds also have severely limited domain-general information processing capacities. For example, working memory increases greatly between 6.5 and 12-months, probably due to maturation of prefrontal cortex (Diamond & Goldman-Rakic, 1989). Other executive functions, such as the capacity to inhibit prepotent responses also show marked developmental changes over this age range (Diamond, 1991). Relatively impoverished goal representations, plus domain-general information processing limitations, may have contributed to the failure of the 7-month-olds in the avoidance condition. Perhaps their failure reflects a relatively superficial bias in favor of approach over avoidance representations as well as information processing limitations that preclude overcoming this bias. If this is so, much older babies, relative experts at goal representations, with markedly increased executive function, might succeed at the avoidance condition of Experiment 1. Experiment 2 tests this hypothesis with 14-month-olds.
Method
Participants
Sixteen full-term infants (mean age 14;1, range 13;18-14;22, 5 female) participated in Experiment 2. Three additional infants were tested, but were excluded from analysis due to fussiness.
Procedure
The stimuli, setup and procedure were identical to the Avoidance condition of Experiment 1.
Results
As in Experiment 1 we excluded data when the difference between the violation and expected test trials exceeded 2 standard deviations from the mean difference across subjects, considering the first and second pairs of test trials separately. Two pairs of second test trials were excluded on this basis. The results are shown on Figure 2.
Habituation
Nine infants reached the habituation criterion, and a paired samples t-test indicated that infants looked less over time during habituation (M first 3 = 32.2; M last 3 = 15.8; t(15) = 3.96, p = 0.001). Comparing the 14 month old infants in Experiment 2 to the 7 month olds in the Avoidance condition of Experiment 1, an ANOVA examined the effects of experimental group (7 m.o. vs. 14 m.o.) and habituation trial (first 3 vs. last 3) on looking times during habituation. There was no significant interaction, F(1,30) = 0.87; p = 0.36, suggesting that infants of different ages did not habituate at different rates to the Avoidance display; There was a significant main effect of experiment, F(1,30) = 8.23; p < .01, indicating that the older infants looked longer over the habituation phase (M 14 m.o. = 24.01; M 7 m.o. = 14.7).
Test Trials
An ANOVA examined the effects of the within-subject variables of trial type (Violation vs. Expected), trial pair (first vs. second pair) and experiment (7 m.o. vs. 14 m.o.) on looking times during the test trials. This revealed a main effect of trial pair, F(1,28) = 4.5, p = 0.04, with infants looking longer overall on the first pair of test trials. There was also a main effect of experiment, F(1,28) = 9.8, p < 0.01, with older infants looking longer than younger ones at the test events. Importantly, there was no significant interaction of trial type and experiment, suggesting that older infants did not differentiate the expected from the unexpected events any more than did younger infants. Planned comparisons (see Table 1) found that the 14-month-olds failed to dishabituate to the first violation test trial, relative to the last three habituation trials, and did not differentiate the violation test trials from the expected test trials, nor on the first or second pairs of test trials, nor overall.2 Nine out of 16 infants looked longer at the violation test trials than the expected trials, which was not significantly different from chance according to a Wilcoxon Signed Ranks test.
Thus, 14-month-olds, like 7-month-olds, failed to predict that the hand would continue to avoid the fixed object, in favor of the variable ones.
Discussion
Like younger infants, 14 month-olds do not look longer at violation than expected events in this Avoidance condition. Given all the additional capacities of 14-month-olds over 7-month-olds, both domain general capacities such as increased working memory and executive function (Diamond, 1991), and domain specific capacities relevant to intentional attributions (Gredebäck, et al., 2009; Beier & Carey, 2013; Woodward, 2003, Carpenter, et al., 1998, Behne, et al., 2005; Gergely & Csibra, 2003), the older infants’ failure to represent avoidances in the present study is particularly striking.
We do not claim that 14-month-old infants cannot represent avoidance behavior under any circumstances, since it is of course possible that they would succeed if given additional cues that the agent’s goal is in fact to avoid the fixed object. The same is true of 7-month-olds. Further work is required to characterize the extent of infants’ difficulty with avoidance and the conditions necessary for them to represent avoidance goals. For example, if the agent showed a negative emotional reaction towards the avoided fixed object, or if the hand hovered over the avoided object repeatedly, as if considering reaching for it, before reaching for the variable object every time, infants may be more likely to notice the avoidance. Nevertheless, the experiments presented here show that there is a significant asymmetry between the evidence infants need to represent a goal-directed approach versus an avoidance. While the evidence given 7-month-olds in the Approach condition suffices to lead them to consistently expect continued approach, perhaps having taken consistent approach as evidence for a positive disposition toward the fixed object, the same sort and amount of evidence is not enough for 7-month-olds, or even 14-month-old infants to expect continued avoidance.
Experiment 3
Experiments 1 and 2 show that infants do not encode consistent reaches to and away from an object with equal ease, given the same kind of evidence. It is possible that on the basis of observed actions, avoidance goals are more difficult to encode than approach goals because of the basic structure of infants’ capacity for goal inference. We will return to why that might be so. However, infants may also have failed to encode the consistent avoidance in experiments 1 and 2 because of general cognitive demands of the Avoidance condition that are not specific to representations of the agent’s attitudes toward the objects or to the agent’s goals. For instance the movement of each object may be an overpowering attentional draw, such that on every trial infants encode only the moved object and fail to encode the object that remains still on the stage. This would lead to encoding the identity of the fixed object in the Approach condition, since it is the one that always moves, and failure to encode the identity of the fixed object in the Avoidance condition, since it never moves. Relatedly, it may be that the cognitive resources necessary to represent what is happening to the bear preclude an additional representation of what isn’t happening to the ball. Or perhaps infants represent the entire Avoidance display as, “a different object moves every time” – a representation not possible in the Approach condition – in which case the violation test event is not a violation of the rule and would not be expected to cause dishabituation. Finally, perhaps infants simply assume that the fixed object is part of the plank, and thus don’t attend to it at all.
Experiment 3 tests these alternative accounts. Instead of a hand reaching for each variable object, we draw the infant’s attention to the variable objects by making the objects move on their own, rising into the air and dangling (pulled up on invisible strings controlled by the experimenter). The fixed object never moves during habituation, moving only on the violation event during the test phase. If the attentional pull or processing demands of the moving object preclude attention to or inferences about the stationary object, then 7-month-old infants will fail to dishabituate to the violation event here as well. In contrast, if the failure in Experiments 1 and 2 reflects constraints on representing intentional actions per se, 7-month-olds may succeed in Experiment 3, where the inherent motion of the objects does not signal any goal-directed action. Since there are no reaching actions, there is no avoidance to represent in this case, and no dispositional attitudes of an agent towards the object. Infants would need to encode only that there is one exceptional object, which sits still while all the others move, in order to dishabituate when that fixed object finally moves on the violation test event.
The stage and object setup of Experiment 3 was identical to the Avoidance condition of Experiment 1. Variable and fixed objects were attached to thin wire which allowed them to be lifted and dangled in the air (exhibiting motion similar to Experiment 1, but without a hand). Following the design of the Avoidance condition of Experiment 1, the variable object dangled in the air on every habituation trial, while the fixed object never did. Thus, Experiment 3 was identical to the Avoidance condition of Experiment 1 except that the motion of the objects was not caused by a visible hand.
Method
Participants
Sixteen full-term infants participated in the study (mean age 7;3, range 6;15-7;15, 7 female). Ten additional infants were excluded and replaced: 9 due to fussiness and 1 due to parental interference.
Stimuli and Setup
We modified the stimuli used in Experiment 1 by gluing a small magnet on top of each object. While objects were onstage, this magnet was connected to a thin wire, allowing the experimenter to lift and dangle each object by tugging on the wire from above (out of the infant’s view). Once each variable object was shuttled offstage, the experimenter disconnected it from the wire and swapped a new variable object into place.
Procedure
The procedure was identical to Experiment 1, except that instead of a hand reaching for an object in the infant’s view, that object was lifted by the wire and dangled, jiggling, until the infant looked way and the trial ended. We attempted to give the strongest possible impression of a freely floating object by using black wire against a black background.
Results
Habituation
The results are depicted on Figure 1 and in Table 1. Looking times decreased significantly during habituation (first 3 trials M = 28.8; last 3 trials M = 15.09; t = 2.55, p < .05). Nine infants in Experiment 3 reached criterion, which was significantly fewer than the 14 infants who reached criterion on the Avoidance condition of Experiment 1 (χ2(1, N = 32) = 3.87, p < 0.05). However, an ANOVA comparing habituation (first vs. last three trials) between this experiment and the Avoidance condition of Experiment 1 (Inherent Motion vs. Avoidance) found no interaction, F(1,30) = 0.07, p = 0.79. Infants, therefore, entered the Test Trials of Experiment 3 having lost interest in the habituation trials to a similar degree as infants in the Avoidance condition of Experiment 1. There was also a marginal main effect of condition, F(1,30) = 3.76, p = 0.06. Infants’ overall looking to the free-floating objects was greater than to those lifted by hand, perhaps because they do not expect objects such as these to move by themselves and float.
Test Trials
One infant’s second pair of test trials was excluded from analysis because the difference in looking time between expected and violation trials was greater than two standard deviations from the mean. As can be seen from Table 1, averaging across the first and second pair of test trials, infants looked significantly longer to violation trials than expected trials t(15) = 3.52, p < 0.013. This pattern was observed on both the first and second pairs of test trials, although not significantly on each pair. A non-parametric analysis confirmed this result. Fourteen out of 16 infants looked longer at the two violation trials than the two expected events, significantly more than expected by chance according to a Wilcoxon Signed Ranks test (z = 2.69, N = 16 p < 0.01). Thus, infants were more surprised to see floating by a previously non-floating object, compared to floating by a novel object.
To confirm that the difference in the pattern of results from the Avoidance condition in Experiment 1 and those from Experiment 3 was statistically reliable, an ANOVA examined the effects of trial type (expected vs. violation), trial order (first pair vs. second pair), and Experiment (Avoidance condition of Experiment 1 vs. Experiment 3) on looking times during the test trials. This analysis revealed a significant interaction of trial type and condition, F(1, 29) = 14.45, p = .001, and no other significant main effects or interactions. The interaction reflected the fact that infants looked longer at the unexpected test trials only in Experiment 3, the reverse pattern compared with the Avoidance condition of Experiment 1 (see Figure 2).
Discussion
In Experiment 3 infants looked reliably longer when an object rose and jiggled if that particular object had repeatedly failed to do so on previous trials, compared to when a novel object moved. Thus, infants were able to notice that the fixed object was always still and expected it to continue being still. This finding constrains our interpretation of Experiment 1, in which infants were not surprised to see a hand lift and jiggle an object when, previously, that object had never moved.
Many experiments show that even young infants may take the capacity for self-generated motion as evidence that an entity is a dispositional causal agent, whereas evidence that an entity moves only upon contact leads to its categorization as dispositionally inert (e.g., Luo & Baillargeon, 2005; Saxe, Tenenbaum, & Carey, 2005; Saxe, Tzelnic, & Carey, 2007; Muentener & Carey, 2010; Luo, Kaufman & Baillargeon, 2009). That is, both of the categories dispositional causal agent and inert object are available to infants, and both have inferential consequences in predictions about future events that involve that type of entity. Thus, it seems possible that the intermittent self-generated movement of each variable object provided a sufficient cue to it falling in the former category, while the still object was more saliently inert by contrast. Infants’ surprise at the violation trial of this experiment may be due to an object that they thought was inert moving on its own for the first time, effectively revealing itself to be a causal agent.
Nevertheless, in order to make such an inference, infants must have attended to the fixed object and represented its inertness. Thus, infants’ failure in the Avoidance condition of Experiments 1 and 2 cannot reflect a complete inability to process information about persistent inertness, given infants’ success in Experiment 3. Nor can it reflect an inability to attend to the non-moving fixed object during habituation, nor their representing these situations as “a different object moves every time”, nor discounting the fixed object as affixed to the plank and thereby irrelevant, nor an inability to entertain two simultaneous representations – both of what is dangling and what is, by contrast, still. All these would have predicted a failure on Experiment 3. Rather, infants’ failure in the Avoidance condition of Experiment 1 and Experiment 2 may reflect a more narrow processing bias or constraint, specific to the domain of interpreting goal-directed behavior and agent’s positive or negative dispositions toward objects.
It is possible that a hand’s picking up an object and shaking it is a more powerful attentional draw than is that object’s moving by itself, such that the failure to dishabituate in the avoidance condition does reflect a failure to attend to the stationary object after all, in spite of infants’ attending to this object in Experiment 3. Several considerations speak against this explanation. Previous research shows that the standard reaching paradigm only works when the hand reaches in a goal directed manner (not in a “flop”), suggesting that attentional biases towards hands or reaching things generally cannot account for infants’ successes (Woodward, 1999). Additionally, infants had ample opportunity to attend to the avoided object in the Avoidance condition: it was present on-stage for the full duration of the experiment (including between trials, when no hands were present), it was never occluded from view, and it was shuttled across the stage between each trail. Finally, overall looking was greater in Experiment 3 than in the Avoidance condition of Experiment 1, suggesting that various objects moving on their own are a powerful attentional draw. We do not deny, of course, that the reaching and grasping hand in Experiments 1 and 2 is the relevant difference between these experiments and Experiment 3, for this is what sets up the context for representations of approach and avoidance, and positive or negative dispositions towards objects.
General Discussion
Experiment 1 demonstrates that 7-month-old infants expect consistency in the approach behavior of a goal-directed hand, but not in a hand’s avoidance behavior. If an object has been consistently approached in favor of diverse others, infants expect the hand to continue to approach that object. In contrast, if an object has been consistently avoided in favor of diverse others infants do not predict that the agent will continue to avoid that object. Experiment 2 shows that this failure to generalize across instances of avoidance extends at least until 14 months. Experiment 3 shows that if the objects move on their own instead of being picked up by a hand, 7-month-olds do expect an object that has never moved to continue being still, thereby controlling for a number of low level alternative explanations. These findings allow us to specify more precisely the contents of infants’ early representations of others’ mental states, particularly in the most commonly used paradigm to study early goal attributions and attributions of agents’ dispositions towards objects.
Our results also bear on a debate concerning infants’ goal representations that derives from Luo and Baillargeon’s (2005) finding that, if there is only one object present during habituation, infants do not expect the agent to continue approaching that object during a subsequent test event in which there is a choice between it and a second object. Luo and Baillargeon argued that infants’ expectation of a consistent reach is contingent on seeing evidence of the agent’s relative preferences during habituation – for example, that the agent specifically prefers the ball to the bear, not just that the agent wants the ball. Further evidence for this interpretation derives from the fact that the nature of the foil matters (it must be a different basic-level kind from the target of the reach; Spaepen and Spelke, 2007) and the fact that 7- and 12-month-old infants are sensitive to whether the foil is visible to the reaching agent (Luo and Johnson, 2009; Luo and Baillargeon, 2007). Luo and Baillargeon concluded that infants are representing a preference between two particular objects.
However, infants’ success on the Approach condition of Experiment 1 supports Baillargeon’s and her colleagues’ revision of this hypothesis (Baillargeon, et al., 2014). In the violation test trials of the Approach condition, infants expected an agent to continue reaching for a ball over a brush (for instance), even though the brush had never appeared before and there was therefore no evidence of the agent’s preference between these two specific objects. This shows that infants do not require evidence of the agent’s preference of one out of two specific objects in order to form an expectation about the agent’s future reaches towards either object. If infants do represent the agent’s preference between the two objects, it is a generalized preference of the form the agent prefers X to other things rather than the agent prefers X to Y. Alternatively and perhaps most simply, as Baillargeon et al (2014) now argue, infants can infer that the agent has a general positive disposition towards the object – a representation that the agent likes X, though in some contexts an alternative choice or another cue to the agent’s disposition is needed to support this inference. Other recent results converge on this interpretation. Robson and Kuhlmeier (2013) found that infants who are habituated to a reach for X over Y – but not to a reach for X when presented alone – will dishabituate to a reach for a novel object Z over X, again suggesting that their expectation of continued reaching for X does not depend solely upon a representation of a preference of X over Y.
The news from the present results is the failure of both 7-month-old and 14- month-old infants to distinguish between violation and expected events in the test trials of the avoidance displays. This failure does not show that infants of these ages are incapable of encoding avoidances, or, alternatively, of attributing negative dispositions toward objects. Whether or not there exist other mechanisms that process avoidance, it is at least the case that avoidance is not spontaneously computed by the specific mechanism responsible for attributing goals or agents’ dispositions toward objects given consistent reaches to one object over another. This is the case even when the amount of information available to compute avoidance is strictly equated with the amount of information available to compute approach.
There are two possible biases, which are not mutually exclusive, that might explain infants’ failure. The first is a bias operating on representational inputs: This mechanism infers goals based on the representational input “approaches object”, as compared with the input “avoids object”. Although by presenting exactly two objects on each trial our study was designed to equate the statistics relevant to computations of approach and avoidance, these constraints rarely apply in natural settings. Typically, a hand reaching for a ball clearly means to grab the ball, while a hand reaching away from a bear (and for the ball) might not have any particular designs concerning the bear at all; it might simply want the ball. More generally, the number of actions an agent is performing at any given time is dwarfed by the number of actions that agent is not performing, and trying to compute for each non-action whether it is goal-directed is neither computationally plausible nor a good way of figuring out what the agent is likely to do next. Thus, it is plausible that there is a bias to attend selectively to approaches when encoding goals. The second possibility is a bias operating on representational outputs: This mechanism preferentially infers mental states of the type “wants or likes object”, “has the goal to touch the object” as compared with the types “doesn’t want or doesn’t like object” or “has the goal to avoid the object”.
In either case, the question arises how adults are able to represent avoidance goals. In order to verify that adults possess this competency and will spontaneously deploy it in our experimental design, we randomly assigned 16 adults to watch videos of either the Approach or Avoidance conditions, where the length and number of habituation trials matched the means from the respective conditions in the infant-directed paradigm in Experiment 1. Pausing the video at the end of the habituation trials, we asked adults to say what is happening in the video and to predict what would happen next. Although answers on the first question were generally under-informative (e.g. “A hand reaches out and grabs one of the objects. The objects get replaced”), in answer to the second question, every participant in both conditions described the hand’s pattern correctly and predicted that the hand would continue its pattern once the video resumed. Following these two prompts, adults saw a violation trial and were asked if this trial was what they expected. Again, every participant but one expressed surprise at the violation, saying that, for example, the hand was “going nuts”, “breaking with tradition”, or “undermining” its pattern in a way that was “shocking”. The one dissenting participant, who watched the Approach condition, had previously predicted that the hand would continue grabbing the same object but said he had “hoped” it would grab the other one next, “just to change things up”. This participant said he was not surprised when the hand violated its pattern, because he was “hoping that would happen”. Out of the eight adults who saw the Avoidance habituation display, six used some form of verbal negation to justify their prediction of what would happen next (e.g. the hand grabbed the new toy “and not” the old one, “never” touched the old object, “hadn’t” touched it, or “wasn’t” touching it). The remaining two described the hand as “avoiding” the object.
Perhaps the most significant resource available to adults is a facility with a combinatorial system of thought. This system can access the logical concept NOT, and can represent the avoidance condition as a series of events of the same kind – reaches for NOT the ball. However, the conceptual basis of adult’s competence in reasoning about avoidance remains an important topic for future research, as does the developmental process by which this competence is acquired. As a next step, it will be important for future work to determine the age at which infants or toddlers begin to succeed in representing avoidance from the same kind of information they use to represent approach.
The failure of infants to note the violation in the Avoidance display shows not only that the sequence of consistent non-reaches in the Avoidance condition doesn’t spontaneously trigger an avoid representation, but also that the approach representations that they do generate do not spontaneously enter into a domain-general computation with a negation operator. (“She wants the ball but not the bear… She wants the hat but not the bear… She wants the apple but not the bear….”, etc.) This account predicts that success on the Avoidance condition of Experiment 1 would be enabled as children gain facility with truth-functional negation – the knowledge that if some proposition P is true, than its negation, Not-P is false. Little is known about the developmental course of this capacity, but it does not appear in children’s speech until at least 24 months or, according to some, much later than that (24 months, Pea, 1982; around 28 months, Hummer, Wimmer and Antes, 1993; not until 4–5 years, Kim, 1985; Nordmeyer and Frank, 2013). While the findings of infants’ success in Experiment 3 might be seen as challenging to this hypothesis, they are far from showing that infants succeed in processing negation or attending to consistent non-events broadly. Rather, as we argued above, infants have categories of both self-moving dispositional causal agents and inert objects. If infants interpreted the variable floating objects as agents, they may have succeeded on Experiment 3 by noticing the contrast between these agents and the inert fixed object. Being surprised that what they thought was inert suddenly turned out to be an agent does not require use of a negation operator.
The distinction between approach and avoidance is related to the distinction between actions and omissions. The avoidances we presented to infants are a form of omission: The agent is not acting on the fixed object. The distinction between actions and omissions has been explored in the literature on adults, where it has been shown to influence adults’ judgments of causal responsibility, intent, and blame (Spranca, Minsk, & Baron, 1991; Ritov & Baron, 2010). For example, if adults read about Evan who deliberately tips over a bucket of water and Jeff who deliberately allows a shaky bucket to tip over on its own, they say that Evan caused and intended the water to spill more than Jeff did. (Cushman & Young, 2011). If they read about Evan who deliberately kills a man and Jeff who deliberately allows a man to die, they say that Evan committed a greater moral wrong (e.g., Spranca, et al., 1991).
Our findings suggest a possible connection between infant cognition and the adult bias to draw stronger inferences from representations of actions than from representations of omissions. Adults appear to place observed actions into a causal and moral framework spontaneously, but require some measure of cognitive control to treat omissions the same way (Cushman, Murray, Gordon-McKeon, Wharton & Greene, 2011). This suggests continuity across infants’ and adults’ representations of events. If infants’ capacity for goal attribution operates over actions more readily than over omissions – or if, in the extreme case, the capacity to engage in the controlled processing needed to see omissions and avoidances as goal-directed emerges later in development – the adult “omission effect” might reflect an enduring signature of the earliest-emerging psychological capacity for intentional attribution.
Infants’ representations of others’ approach and avoidance goals are asymmetrical
7-m.o.s represent approach goals given an agent picking one item over varying foils
7 and 14-m.o.s fail to represent avoidance goals given a consistently avoided item
Outside of a goal context, 7-m.o.s do represent an item as consistently inert
Acknowledgments
For assistance in this research project the authors thank Jay Costa, Logan Bailey, Jennifer Kim, Hannah Begley, McCaila Ingold-Smith and Caryn Harris.
Footnotes
Order of expected/unexpected trials in violation of expectancy experiments are usually counterbalanced, because usually they have some salient difference in overall structure that in itself might increase looking time. For example, in the Woodward paradigm, the location of the two objects is switched between habituation and test trials. However, in our design there is no break or any signal of difference between habituation and test trials, we did not counterbalance the order of test trials – violation trials were always presented first. This raises the potential concern that infants may dishabituate to the first test trial, regardless of its content. Critically, however, this cannot explain the different patterns of dishabituation between the Approach and Avoidance condition, and specifically, the lack of dishabituation to the first violation test trial in the Avoidance condition.
Furthermore, to verify that infants did not dishabituate on the first violation test trial only because it came first, we conducted pairwise comparisons, treating the last habituation trial each infant received as if it were the first expected test trial. Thus, the “1st pair” analysis in this case compares the last habituation trial and the first violation test trial. The 2nd pair comparison is between the first expected and the second violation test trial. And the comparison over the averages of violation and expected trials would take the average of the first and second members of these pairs. Analyzing the data in this way reveals essentially the same pattern of findings. Importantly infants in the Approach condition looked longer at the violation trials, t(15)=3.15, p=0.007, averaged across both pairs, whereas infants in the Avoidance condition did not differentiate, overall, between the two trial types, t(15)=1.51, p=0.15. In the Avoidance condition, infants looked significantly longer at the expected trial that follows the first violation trial relative to that violation trial, t(14)=2.65, p=0.02, an effect discussed in the text.
As in Experiment 1, we again analyze the data in a way that treats the last habituation trial as if it was the first test trial. So the “1st pair” analysis here compares the last habituation trial and the first violation test trial. The 2nd pair comparison is between the first expected and the second violation test trial. And the comparison over the averages of violation and expected trials would take the average of the first and second members of these pairs. Analyzing the data of Experiment 2 this way, there were no significant differences between violation and expected trials in Experiment 2.
As in Experiments 1 and 2, we again analyze the data in a way that treats the last habituation trial as if it was the first test trial. So the “1st pair” analysis here compares the last habituation trial and the first violation test trial. The 2nd pair comparison is between the first expected and the second violation test trial. And the comparison over the averages of violation and expected trials would take the average of the first and second members of these pairs. Analyzing the data of Experiment 3 this way, there is a significant difference between the averages of the two expected trials, on the one hand, and the two unexpected trials, on the other: t(15)=2.62, p=0.02.
Publisher's Disclaimer: This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final citable form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
Contributor Information
Roman Feiman, Department of Psychology, Harvard University.
Susan Carey, Department of Psychology, Harvard University.
Fiery Cushman, Department of Psychology, Harvard University.
References
- Baillargeon R, Scott RM, He Z, Sloane S, Setoh P, Jin K, Wu D, Bian L. Psychological and sociomoral reasoning in infancy. In: Mikulincer M, Shaver PR, Borgida E, Bargh JA, editors. APA handbook of personality and social psychology: Vol. 1. Attitudes and social cognition. Washington, DC: American Psychological Association; 2014. pp. 79–150. [Google Scholar]
- Behne T, Carpenter M, Call J, Tomasello M. Unwilling versus unable: infants’ understanding of intentional action. Developmental psychology. 2005;41(2):328. doi: 10.1037/0012-1649.41.2.328. [DOI] [PubMed] [Google Scholar]
- Beier JS, Carey S. Contingency is not enough: Social context guides third- party attributions of intentional agency. Developmental psychology. 2014;50(3):889–902. doi: 10.1037/a0034171. [DOI] [PubMed] [Google Scholar]
- Beier JS, Spelke ES. Infants’ developing understanding of social gaze. Child development. 2012;83(2):486–496. doi: 10.1111/j.1467-8624.2011.01702.x. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Biro S, Verschoor S, Coenen L. Evidence for a unitary goal concept in 12-month-old infants. Developmental science. 2011;14(6):1255–1260. doi: 10.1111/j.1467-7687.2011.01042.x. [DOI] [PubMed] [Google Scholar]
- Carpenter M, Nagel K, Tomasello M. Social cognition, joint attention, and communicative competence from 9 to 15 months of age. Monographs of the Society for Research in Child Development. 1998;63:176–176. [PubMed] [Google Scholar]
- Cushman F, Murray D, Gordon-McKeon S, Wharton S, Greene JD. Judgment before principle: engagement of the frontoparietal control network in condemning harms of omission. Social cognitive and affective neuroscience. 2011;7(8):888–895. doi: 10.1093/scan/nsr072. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Cushman FA, Young L. Patterns of moral judgment derive from nonmoral psychological representations. Cognitive Science. 2011;35:1052–1075. doi: 10.1111/j.1551-6709.2010.01167.x. [DOI] [PubMed] [Google Scholar]
- Diamond A. Neuropsychological insights into the meaning of object concept development. In: Carey S, Gelman R, editors. The epigenesis of mind: Essays on biology and knowledge. Hillsdale, NJ: Lawrence Erlbaum Associates; 1991. pp. 67–110. [Google Scholar]
- Diamond A, Goldman-Rakic PS. Comparison of human infants and rhesus monkeys on Piaget’s AB task: Evidence for dependence on dorsolateral prefrontal cortex. Experimental Brain Research. 1989;74(1):24–40. doi: 10.1007/BF00248277. [DOI] [PubMed] [Google Scholar]
- Egyed K, Király I, Gergely G. Communicating shared knowledge in infancy. Psychological Science. 2013;24(7):1348–1353. doi: 10.1177/0956797612471952. [DOI] [PubMed] [Google Scholar]
- Gergely G, Csibra G. Teleological reasoning in infancy: the naive theory of rational action. Trends in Cognitive Science. 2003;7:287–292. doi: 10.1016/s1364-6613(03)00128-1. [DOI] [PubMed] [Google Scholar]
- Gredebäck G, Stasiewicz D, Falck-Ytter T, Rosander K, von Hofsten C. Action type and goal type modulate goal-directed gaze shifts in 14-month-old infants. Developmental psychology. 2009;45(4):1190. doi: 10.1037/a0015667. [DOI] [PubMed] [Google Scholar]
- Hamlin JK, Wynn K. Who knows what’s good to eat? Infants fail to match the food preferences of antisocial others. Cognitive Development. 2012;27:227–239. [Google Scholar]
- Hamlin JK, Wynn K, Bloom P. 3-month-olds show a negativity bias in their social evaluations. Developmental Science. 2010;13(6):923–929. doi: 10.1111/j.1467-7687.2010.00951.x. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Hernik M, Southgate V. Nine-months-old infants do not need to know what the agent prefers in order to reason about its goals: on the role of preference and persistence in infants’ goal-attribution. Developmental science. 2012;15(5):714–722. doi: 10.1111/j.1467-7687.2012.01151.x. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Hornik R, Risenhoover N, Gunnar M. The effects of maternal positive, neutral, and negative affective communications on infant responses to new toys. Child Development. 1987:937–944. [Google Scholar]
- Hummer P, Wimmer H, Antes G. On the origins of denial negation. Journal of Child Language. 1993;20(03):607–618. doi: 10.1017/s0305000900008503. [DOI] [PubMed] [Google Scholar]
- Kim K. Development of the concept of truth-functional negation. Developmental Psychology. 1985;21(3):462. [Google Scholar]
- Lakusta L, Wagner L, O’Hearn K, Landau B. Conceptual foundations of spatial language: Evidence for a goal bias in infants. Language learning and development. 2007;3(3):179–197. [Google Scholar]
- Luo Y, Baillargeon R. Can a self-propelled box have a goal? Psychological reasoning in 5-month-old infants. Psychological Science. 2005;16(8):601–608. doi: 10.1111/j.1467-9280.2005.01582.x. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Luo Y, Kaufman L, Baillargeon R. Young infants’ reasoning about physical events involving inert and self-propelled object. Cognitive Psychology. 2009;58(4):441–486. doi: 10.1016/j.cogpsych.2008.11.001. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Luo Y, Johnson SC. Recognizing the role of perception in action at 6 months. Developmental Science. 2009;12(1):142–149. doi: 10.1111/j.1467-7687.2008.00741.x. [DOI] [PubMed] [Google Scholar]
- Muentener P, Carey S. Infants’ causal representations of state change events. Cognitive Psychology. 2010;61(2):63–86. doi: 10.1016/j.cogpsych.2010.02.001. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Nordmeyer AE, Frank MC. Measuring the comprehension of negation in 2- to 4-year-old children. Proceedings of the 35th meeting of the cognitive science society.2013. [Google Scholar]
- Onishi KH, Baillargeon R. Do 15-month-old infants understand false beliefs? Science. 2005;308(5719):255–258. doi: 10.1126/science.1107621. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Pea RD. Origins of verbal logic: Spontaneous denials by two-and three-year- olds. Journal of Child Language. 1982;9(3):597–626. doi: 10.1017/s0305000900004931. [DOI] [PubMed] [Google Scholar]
- Phillips AT, Wellman HM, Spelke ES. Infants’ ability to connect gaze and emotional expression to intentional action. Cognition. 2002;85(1):53–78. doi: 10.1016/s0010-0277(02)00073-2. [DOI] [PubMed] [Google Scholar]
- Repacholi BM, Gopnik A. Early reasoning about desires: Evidence from 14-and 18-month-olds. 1997 doi: 10.1037//0012-1649.33.1.12. [DOI] [PubMed] [Google Scholar]
- Ritov I, Baron J. Protected values and omission bias. Organizational Behavior and Human Decision Processes. 1999;79(2):79–94. doi: 10.1006/obhd.1999.2839. [DOI] [PubMed] [Google Scholar]
- Robson SJ, Kuhlmeier VA. Selectivity promotes 9-month-old infants to encode the goals of others. Poster presented at the meeting of the Society for Research in Child Development; Seattle, WA. 2013. [Google Scholar]
- Saxe R, Tenenbaum JB, Carey S. Secret Agents: Inferences about hidden causes by 10- and 12-month-old infants. Psychological Science. 2005;16(12):995–1001. doi: 10.1111/j.1467-9280.2005.01649.x. [DOI] [PubMed] [Google Scholar]
- Saxe R, Tzelnic T, Carey S. Knowing who dunnit: Infants identify the causal agent in an unseen causal interaction. Developmental Psychology. 2007;43(1):149–158. doi: 10.1037/0012-1649.43.1.149. [DOI] [PubMed] [Google Scholar]
- Senju A, Csibra G. Gaze following in human infants depends on communicative signals. Current Biology. 2008;18(9):668–671. doi: 10.1016/j.cub.2008.03.059. [DOI] [PubMed] [Google Scholar]
- Senju A, Southgate V, Snape C, Leonard M, Csibra G. Do 18-month-olds really attribute mental states to others? A critical test. Psychological science. 2011;22(7):878–880. doi: 10.1177/0956797611411584. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Sodian B, Thoermer C. Infants’ understanding of looking, pointing, and reaching as cues to goal-directed action. Journal of Cognition and Development. 2004;5(3):289–316. [Google Scholar]
- Sommerville JA, Woodward AL, Needham A. Action experience alters 3-month-old infants’ perception of others’ actions. Cognition. 2005;96(1):B1–B11. doi: 10.1016/j.cognition.2004.07.004. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Spaepen E, Spelke E. Will any doll do? 12-month-olds’ reasoning about goal objects. Cognitive Psychology. 2007;54:133–154. doi: 10.1016/j.cogpsych.2006.06.001. [DOI] [PubMed] [Google Scholar]
- Spranca M, Minsk E, Baron J. Omission and commission in judgment and choice. Journal of Experimental Social Psychology. 1991;27(1):76–105. [Google Scholar]
- Vaish A, Grossmann T, Woodward A. Not all emotions are created equal: the negativity bias in social-emotional development. Psychological bulletin. 2008;134(3):383. doi: 10.1037/0033-2909.134.3.383. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Woodward AL, Guajardo JJ. Infants’ understanding of the point gesture as an object-directed action. Cognitive Development. 2002;17:1061–1084. [Google Scholar]
- Woodward AL. Infants selectively encode the goal object of an actor’s reach. Cognition. 1998;69:1–34. doi: 10.1016/s0010-0277(98)00058-4. [DOI] [PubMed] [Google Scholar]
- Woodward AL. Infants’ ability to distinguish between purposeful and non-purposeful behaviors. Infant behavior and development. 1999;22(2):145–160. [Google Scholar]
- Woodward AL. Infants’ developing understanding of the link between looker and object. Developmental Science. 2003;6(3):297–311. [Google Scholar]