

Abstract
We present two methods for observing bumblebee choice behavior in an enclosed testing space. The first method consists of Radio Frequency Identification (RFID) readers built into artificial flowers that display various visual cues, and RFID tags (i.e., passive transponders) glued to the thorax of bumblebee workers. The novelty in our implementation is that RFID readers are built directly into artificial flowers that are capable of displaying several distinct visual properties such as color, pattern type, spatial frequency (i.e., “busyness” of the pattern), and symmetry (spatial frequency and symmetry were not manipulated in this experiment). Additionally, these visual displays in conjunction with the automated systems are capable of recording unrewarded and untrained choice behavior. The second method consists of recording choice behavior at artificial flowers using motion-sensitive high-definition camcorders. Bumblebees have number tags glued to their thoraces for unique identification. The advantage in this implementation over RFID is that in addition to observing landing behavior, alternate measures of preference such as hovering and antennation may also be observed. Both automation methods increase experimental control, and internal validity by allowing larger scale studies that take into account individual differences. External validity is also improved because bees can freely enter and exit the testing environment without constraints such as the availability of a research assistant on-site. Compared to human observation in real time, the automated methods are more cost-effective and possibly less error-prone.
Keywords: Neuroscience, Issue 93, bumblebee, unlearned behaviors, floral choice, visual perception, Bombus spp, information processing, radio-frequency identification, motion-sensitive video
Introduction
A key problem in studying unlearned choice behavior by bumblebees and honeybees is that flower-naïve, untrained workers do not readily enter the testing space where preferences can be measured. As a result, many researchers rely on a less than ideal technique: pre-training workers to feed inside the testing space from ostensibly neutral stimuli that researchers deem to be different from the experimental stimuli. However, recent experiments have shown that stimuli that were thought to be neutral (i.e., stimuli that do not influence subsequent choice behavior in a testing session) have influenced preferences in unexpected ways1. Automated systems that include Radio Frequency Identification (RFID)2 and motion-sensitive video recordings may offer an opportunity solve this problem. The aim of the study was twofold: (1) primarily to contribute to the literature on unlearned floral preferences by bumblebees, (2) and secondarily to evaluate two choice measurement systems, as recorded by two different automated recording devices.
Two automated systems3 were implemented in the present study to observe unlearned choice behavior: RFID and motion-sensitive video recordings. Two crucial elements of both systems are that choices are not rewarded, and the display of different visual cues can be manipulated. Motion-sensitive video (high definition, recording at 1 mp resolution) not only allows continuous observation of freely exploring workers in a flight room, but is critical for the efficient observation of relatively rare events4.
The research question in Experiment 1 relates to how different visual properties interact when displayed together. This study seeks to explore the relative importance of pattern positioning in relation to pattern type. Using a 2 x 2 design, radial (i.e., sunburst) and concentric (i.e., bull’s eye) pattern types are placed either centrally or peripherally on an artificial flower (see Figure 1 for examples of stimuli). RFID readers are built into these specially designed artificial flower stimuli, and bumblebees receive RFID enabled tags that allow us to record each tagged worker that enters the artificial flower stimulus. RFID observation works by the reader mechanism (built into the artificial flowers) sending signals at radio frequencies (13.56 MHz in this case), which are modulated by the presence of passive tags. The reader can detect and record these signal modulations, which vary slightly across tags enabling tag unique identification.
The questions of Experiment 2 are threefold. First, are flower-entry, as measured by RFID, and landing, as measured by video recordings equivalent choice criteria? Choice is measured at different points (landing for video, and flower entry for RFID), which may translate into different measures of preference. Second, what is the effect of central vs peripheral positioning? It is not known whether or not workers would choose a central pattern if a combination consisting of two radial patterns in different positions were presented (see Figure 4b). Third, what is the relative importance of pattern position vs pattern type? In other words, will bumblebees land on patterns of the preferred pattern type, or the preferred pattern position? Bees could prefer central-radial to a peripheral-concentric pattern, but the preference could be due to the pattern type or its central positioning. In this experiment, two variables were pitted against each other5 (see Figure 4c, d).
In Experiment 2, we used motion-sensitive video recordings on flower-like stimuli. Artificial flowers were placed inside a flight cage, and motion-sensitive high-definition camcorders were pointed at these flowers from the front and the top. More specifically, two camcorders were positioned so as to capture the frontal view of each of the two stimuli in the testing space. An additional camcorder was positioned between the stimuli to record hovering behavior from above, and captured behavior from both artificial flowers. Bumblebees were identified using number tags that could be read on high-definition video clips. Hovering, antennation and landing behaviors were observed.
Protocol
The Animal Care Committee of the University of Ottawa has approved our experimental protocol, which delineates safety procedures for personnel working with bees.
1. Testing Environment Preparation
Prepare an empty space (isolated room, or metal-screen covered flight cage) of 2 m x 2 m x 2 m. NOTE: If the room is chosen as the testing space, ensure that bees cannot escape through windows, spaces under doors, and air exchange ducts.
Add small entry points (e.g., approx. 2 cm diameter holes) to the flight cage where bees can enter and exit the testing space without obstruction. Design a mechanism to block access points to keep bees out of the testing space during periods reserved for maintenance and equipment configuration. NOTE: We used Bombus impatiens Cresson workers.
Connect one or two colony boxes to the testing-space using a connector. Ensure that a dead bee cannot block the connector. NOTE: Here, use two types of connecting structures: a wooden “bridge” structure with a glass top cover, and a wire mesh tube. They are easy to clean and they provide traction for the bees.
- Place two artificial flower holders inside the testing-space.
- Place flower holders in the center of the testing-space, or attach them to the wall.
- Connect a “2k6 head” RFID reader to the top of the cylinder portion of the artificial flower using masking tape (see Figure 1 for positioning). Use a 1.2 m tall wooden stand to which to attach artificial flowers. NOTE: The top of the stand should feature an attachment mechanism where artificial flowers can be connected. See Figure 2 for a schematic drawing
Add high-frequency (min. 200 Hz) fluorescent light fixtures to adequately light the testing-space. Use a high frequency electronic ballast to ensure that light flicker is above bumblebees’ visual flicker fusion threshold6. NOTE: Here, use 12 daylight fluorescent bulbs that produce about 1,200 Lux light intensity for a space of 2 x 2 x 2 m.
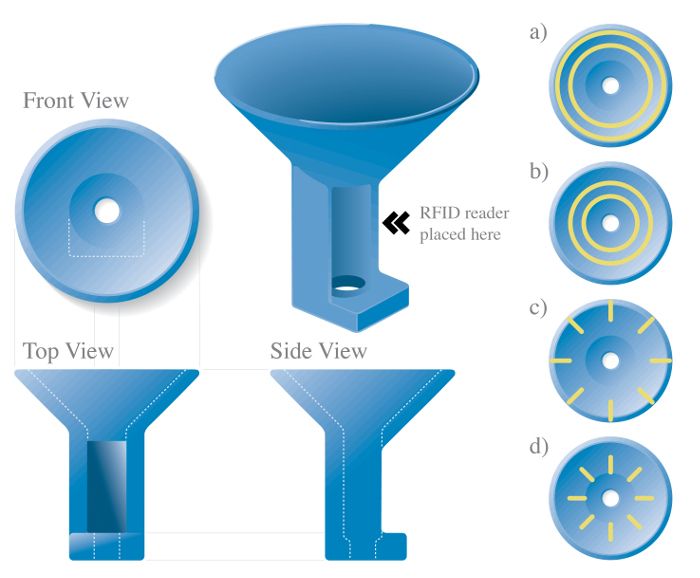 Figure 1. RFID Artificial Flower Design. Schematic diagram of the RFID-enabled artificial flower used in Experiment 1. The RFID reader rested on top of the open cylinder through the center of the flower. Stimuli patterns and positions: a. peripheral-concentric, b. central-concentric, c. peripheral-radial and d. central-radial. This figure has been modified from Orbán et al.11.
Figure 1. RFID Artificial Flower Design. Schematic diagram of the RFID-enabled artificial flower used in Experiment 1. The RFID reader rested on top of the open cylinder through the center of the flower. Stimuli patterns and positions: a. peripheral-concentric, b. central-concentric, c. peripheral-radial and d. central-radial. This figure has been modified from Orbán et al.11.
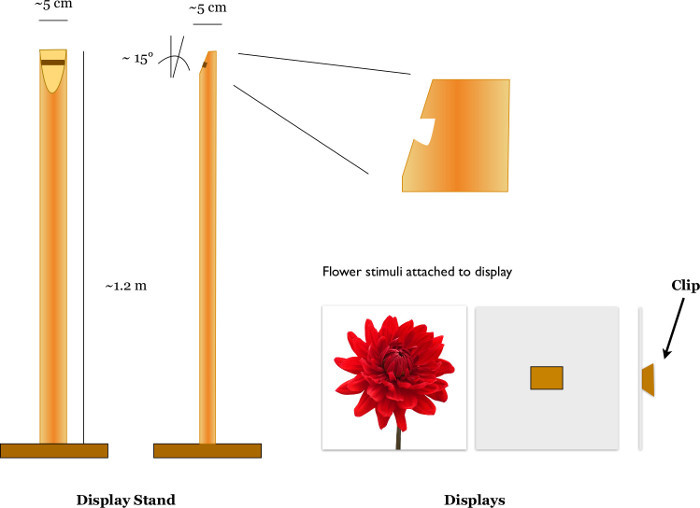 Figure 2. Stimulus Display Stand. A schematic drawing showing the design of the artificial flower stimulus stand, and attachment clip. The attachment clip is glued to the artificial flower and is used to quickly attach and detach the stimuli to and from the stimuli stands. This configuration was used in the motion-sensitive video experiment. Please click here to view a larger version of this figure.
Figure 2. Stimulus Display Stand. A schematic drawing showing the design of the artificial flower stimulus stand, and attachment clip. The attachment clip is glued to the artificial flower and is used to quickly attach and detach the stimuli to and from the stimuli stands. This configuration was used in the motion-sensitive video experiment. Please click here to view a larger version of this figure.
2. Bumblebee Colony Preparation
Upon arrival of commercially ordered colonies, connect the colony box to the flight cage.
- Provide pollen (collected by honeybees from a variety of plants) and sugar-water (1:1 by volume) ad libitum until the start of the testing sessions.
- Boil 1 L of water, and mix in the same volume of sugar to create the sugar-water solution.
- Purchase pollen from an apiarist or the commercial supplier of bumblebee colonies. Grind the pollen with a mortar and pestle, and mix with honey and water (as needed) to make it into a moist paste.
Once the experiment begins, provide 15–40 ml of sugar water (quantity proportional to the colony size) daily. Continue to provide pollen ad libitum. Adjust sugar-water quantity according to storage levels in the honey pots. NOTE: Keeping food storage levels low provides an incentive for workers to leave the nest to seek more food.
Allow bees to enter the testing environment via the connector structure, as described in step 1.3. NOTE: Bees move freely between the nest and the testing environment throughout the experiment.
3. Preparation for Observation by Radio-frequency Identification
Start gluing RFID tags to the thorax of the workers as soon as the colony arrives, and continue throughout the experiment, as new workers emerge.
- Gluing Technique
- Place all workers in individual containers during initial tagging. Cool workers down for approximately 1 hr in the fridge (approximately 7 °C) to slow them down. NOTE: Cooling down workers in advance of tagging helps make aggressive colonies more manageable. This minimizes the chance of stings.
- Using the tagging apparatus and non-toxic glue (provided by the tag provider), attach the RFID tag to the thorax of the worker. Glue RFID tags to workers as they emerge, while they are still in callow stage (before they are capable of flying).
- Wait a minimum of 10 min before placing the worker back in the colony to ensure the RFID tag cannot be removed by the worker.
Dispose of workers that were not tagged during their callow stage, or workers that have lost their RFID tags (as seen by glue residue or bald patch on the thorax). NOTE: These bees may have had experience outside the colony.
- RFID Reader software
- Use a personal computer (PC) to configure the RFID reader software. Change the operating system’s date format to yyyy-mm-dd hh:mm:ss to ensure the downloaded RFID data are correctly encoded. Adjust the program supplied with the RFID readers using C++ programming language to allow exporting the data on the RFID reader as Comma Separated Values (CSV).
- Connect the RFID reader to the computer using an RS-232 to USB connector. Download the data to the RFID reader periodically, before the reader reaches storage capacity (up to 32,000 records). Use RFID readers to record date, time and a thirteen character unique string associated with each tag. Import the downloaded CSV file into a relational database management system (RDBMS).
4. Artificial Flower Preparation for RFID Readers
Purchase blue and yellow bake clay from a local crafts store.
Create a blue cylinder with a diameter of 1.5 cm, and cut a 1.5 cm x 3 cm hole on the side. NOTE: The hole on the side of the cylinder will serve as the receptacle for the RFID reader.
Create a blue cone with a diameter of 8 cm on one end, and 1.5 cm on the other end.
Merge the cylinder and the cone.
Create a 20 cm long and 0.5 cm wide strand of yellow clay.
Cut the yellow strand to size, and work into the blue cone and the cylinder. NOTE: Radial shapes will require 5 cm long straight lines, and concentric shapes will require 4–8 cm long circular lines.
Bake clay at 130 °F until fully hardened.
5. Preparation for Observation by Motion-sensitive Video Recording
Start gluing colored plastic number tags to the thorax of the worker bees as soon as the colony arrives, and continue throughout the experiment as new workers emerge.
Remove all workers during the initial tagging session to ensure that every individual receives a number tag. Place workers back in the colony immediately after tagging. NOTE: Unlike RFID tags, number tags are more difficult for workers to remove.
As new workers emerge, tag them while they are still callow. Tagging frequency varies with the state of colony cycle, but averages to about 7–10 workers every 2–3 days. Dispose of workers that were not tagged during their callow stage because they may no longer be flower-naïve.
- System for tagging more workers than available tag numbers NOTE: If the experiment continues for a period of months and multiple colonies are involved, there is a good chance that available tag numbers run out. There are about 7 distinguishable tag colors, each numbered from 1 to 99 allowing up to 693 concurrently tagged workers. An experiment running for 3 months using 3–4 colonies will have well over 693 workers in total, but never concurrently alive.
- Ensure that numbers tags are positioned systematically (e.g., top side of the tag number is always aligned with the bee’s head), especially for the following numbers: 6, 9, 66, 69, 99.
- Remove dead workers, and record their tag number as “freed up”. Maintain a database of tag numbers and colors that are “available” or “in use” to ensure that a unique tag is not used on multiple bees at the same time. NOTE: Additional tag combinations may be produced by adding colors to already existing colors. For example, adding a yellow dot to a blue tag with a sharpie pen can create new combinations.
- Video Data Processing
- Place two internet protocol (IP) camcorders (minimum 1 mp picture resolution) in front of each floral display, outside the testing environment (see Figure 3).
 Figure 3. Testing Environment. A photograph of the testing environment showing the two frontal camcorders in the foreground, the ceiling camcorder in between the light fixtures, and the stimuli stands with sample stimuli in the middle of the room. NOTE: A glass divider between the IP camcorders and the artificial flowers ensures that the artificial flowers are clearly visible. The IP camcorders may be up to 5 m away from the stimuli. Please click here to view a larger version of this figure.
Figure 3. Testing Environment. A photograph of the testing environment showing the two frontal camcorders in the foreground, the ceiling camcorder in between the light fixtures, and the stimuli stands with sample stimuli in the middle of the room. NOTE: A glass divider between the IP camcorders and the artificial flowers ensures that the artificial flowers are clearly visible. The IP camcorders may be up to 5 m away from the stimuli. Please click here to view a larger version of this figure.
- Replace the stock lenses with 1.8 mm vari-focal lenses. These lenses allow sufficient zoom and focus on the artificial flowers.
- Place an additional IP camcorder directly above the artificial flower, focusing on an area 1–2 m in front of the artificial flowers. This camcorder captures hovering and antennation behaviors.
- Connect the IP camcorders to a PC via a secondary network interface controller (NIC), and an Ethernet hub.
- Configure the PC’s dynamic host configuration protocol (DHCP) to dynamically distribute IP addresses to the IP camcorders.
- Configure a file transfer protocol (FTP) server on the PC.
- Configure an FTP client process to automatically deposit video clips on the PC.
- Configure the IP camcorder to record a 10 sec video clip each time motion is detected.
- Video Clip Analysis
- Open a video clip, and view the contents frame-by-frame using a video viewer of choice.
- Record a bee’s plastic tag number, date and time of recording in a spreadsheet or an RDBMS. Here, define a landing as a bee’s legs coming into contact with the artificial flower. NOTE: Discard choices that are socially influenced (landing while another bee is present on the stimulus).
6. Artificial Flower Preparation for Video Observation
Design visual properties using a graphics editing software. NOTE: Ensure that the printed pattern can be cut and folded into a cone. Use geometrical calculations to produce the cutout shape that results in a cone with an 8 cm diameter.
Print, cut, and fold the visual property into a cone.
Glue attachment clips to stimulus (see Figure 2).
7. Statistical Analysis
In both experiments, compute a choice proportion for each bee (e.g., a particular bee made x choices of one flower out of a total of y).
Analyze these proportions with a replicated Goodness of Fit Test7. NOTE: A replicated G-Test computes a heterogeneity value (Gh) that indicates the amount of variability of replicates (i.e., each bee), and a pooled value (Gp) that indicates the overall significance of all choice proportions. The G values are compared to χ2 values in tests of significance.
8. Stimuli Presentation Sequence
Attach artificial flowers to the flower stands inside the testing space. Change the combination and location of displayed stimuli at regular time intervals (e.g., daily) to avoid location effects.
9. Study Termination
Place the colonies in the deep freezer at -10 °C for 3 days to kill the bees.
Representative Results
Experiment 1: RFID Data
All 375 workers in the colony were RFID tagged, and 318 of these workers (85%) entered the flight-cage at some point during the study. A total of 197 (62% of bees that left the colony) visited at least one of four artificial flower stimuli.
Definition of a choice
A choice was defined as a worker entering into the artificial flower (see Figure 1). We labeled this behavior as “floral exploration.” This definition of a choice is stricter than the ones used in the literature, which, depending on the study, use some combination of hovering, antennation or landing. Floral exploration is a stricter definition of choice because it requires that bees not only attend to a stimulus by hovering, antennating, and landing on it, but also by exploring it.
Data management
RFID techniques have the capacity to collect an enormous amount of data relative to other methods. This experiment produced 310,221 records. A database program such as MySQL is an indispensable tool to store this amount of data and equally important are the SQL queries used to tease out answers to the research questions. For example, one issue is the definition of a choice. The RFID readers were configured to record the presence of a tag every 1 msec, which, in the case of bees that stayed inside the artificial flowers for minutes or even hours, can translate into several thousand recordings. Our definition of a choice was a visit that lasted at least 1 msec, but a new visit would not be counted until the current string of recordings was broken by at least a 1 min break.
Summary of experiment
Four-replicated goodness of fit tests were performed on all choices from a bees’ “naïve session” to compare choice proportions to a theoretical value of chance7. A bee's naïve session refers to the first testing condition in which the bee “participated”. The G-tests reveal a preference for central positioning (see Table 1) and radial pattern type. Figure 4b shows that pattern preference is reversed when the concentric pattern is positioned centrally and the radial pattern is positioned peripherally. However, if positioning is held constant as in Figure 4a and d, pattern preference is towards the radial pattern. Figure 4 shows that the relative proportions of first choices for each pattern for each combination were comparable to the proportions shown for all choices.
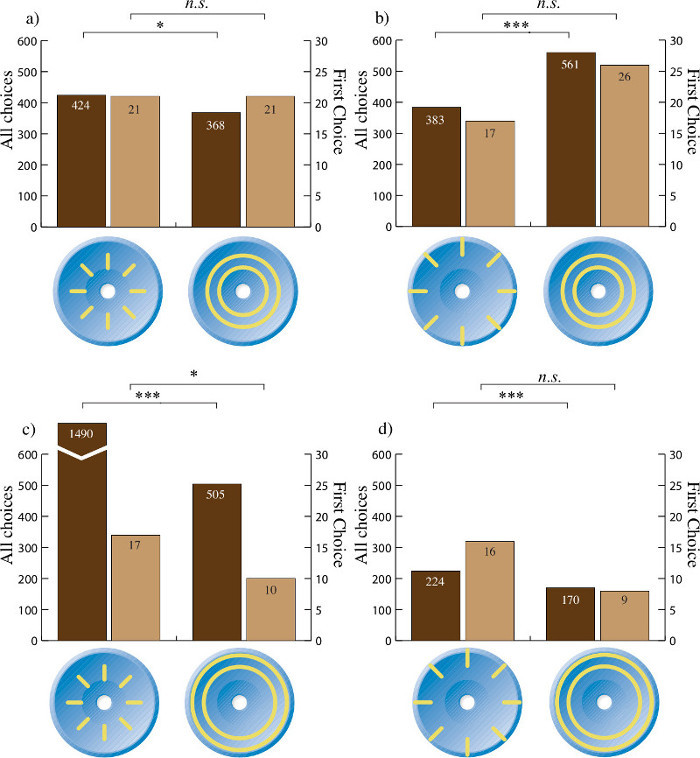 Figure 4. RFID Experimental Results. Choice frequencies at the four different flower combinations in Experiment 1. The dark brown bar graphs show all choices from the bee's naïve session (left-side y-axis), and the light brown bars indicate the first choice of each worker (right-side y-axis). “All choices” show comparable patterns to “first choice”, but with greater statistical power. The bar charts show that the positioning of patterns is more important than the type of a pattern. A centrally positioned pattern was preferred even if the pattern type displayed an otherwise less preferable concentric pattern. Asterisks indicate a choice proportion that is significantly different from chance. Note. * p < .05, ** p < .01, *** p < .001. This figure has been modified from Orbán et al.11.
Figure 4. RFID Experimental Results. Choice frequencies at the four different flower combinations in Experiment 1. The dark brown bar graphs show all choices from the bee's naïve session (left-side y-axis), and the light brown bars indicate the first choice of each worker (right-side y-axis). “All choices” show comparable patterns to “first choice”, but with greater statistical power. The bar charts show that the positioning of patterns is more important than the type of a pattern. A centrally positioned pattern was preferred even if the pattern type displayed an otherwise less preferable concentric pattern. Asterisks indicate a choice proportion that is significantly different from chance. Note. * p < .05, ** p < .01, *** p < .001. This figure has been modified from Orbán et al.11.
| Conditions | Pooled | Heterogeneity | |||||
| Gp | df | p | Gh | df | p | ||
| Central-Radial vs Central-Concentric | 3.96 | 1 | 0.047 | 197.55 | 41 | 0.000 | |
| Peripheral-Radial vs Central-Concentric | 33.77 | 1 | 0.000 | 210.81 | 42 | 0.000 | |
| Central-Radial vs Peripheral-Concentric | 508.31 | 1 | 0.000 | 345.78 | 30 | 0.000 | |
| Peripheral-Radial vs Peripheral-Concentric | 7.42 | 1 | 0.000 | 84.06 | 24 | 0.000 |
Table 1. Inferential Statistics of RFID Data. Experiment 1. This table has been modified from Orbán et al. (2013)11. Gp refers to significant deviation of a group proportion from chance, and Gh refers to the tests for individual differences (i.e., heterogeneity). Please refer to the manuscript for full details on the statistical tests.
Experiment 2: Video Data
A total of 264 choices were recorded across the four conditions over three testing sessions. Table 2 shows the number of workers and choices contributed from each colony.
Definition of a choice
Video data allows the recording of three types of choice behavior: hovering, antennation and landing. While all three types of behaviors can be observed, hovering and antennation are difficult to associate with a tag number due to quick motions that camcorders with poor resolution, or low speed cannot record. It is crucial to use a high-definition camcorder (though this was not available to us, ideally a high-frame rate camcorder should be used to minimize blurring) to ensure tag numbers that may appear only on a small number of frames can be read. This method was also used to compare choice patterns with the RFID technique, which detects floral exploration.
Motion sensitivity considerations
One of the key issues in producing a successful experiment is the configuration of the motion-sensitive camcorders. A camcorder that is too sensitive will record too much data that is impractical and can become very expensive to process. For example, initially our camcorder was triggered by regular vibrations in the building (e.g., people passing by on the hallway, air conditioner, etc.), which resulted in 1–2 valid data points for every 150–200 recorded video clips. On the other hand, an even more serious error is a low sensitivity configuration, which can miss key data. It is crucial to configure all camcorders in the same way, otherwise, sampling errors can skew the results.
Summary of experiment
Four replicated goodness of fit tests found three group proportions that deviated significantly from chance, and one non-significant overall proportion (see Table 3 and Figure 5). (1) Pattern is important: a significant preference for the central-radial over the central-concentric pattern was found (see Table 3). (2) Position of the radial pattern is less important: the presentation of the central-radial and peripheral radial combination showed no significant difference from chance. (3) The central-radial and peripheral-concentric combination resulted in a strong preference towards the central-radial pattern. The central-concentric and peripheral-radial combination elicited significant preference towards the peripheral-radial pattern. Pattern trumped location. Individual differences were non-significant in all four combinations (see Table 3).
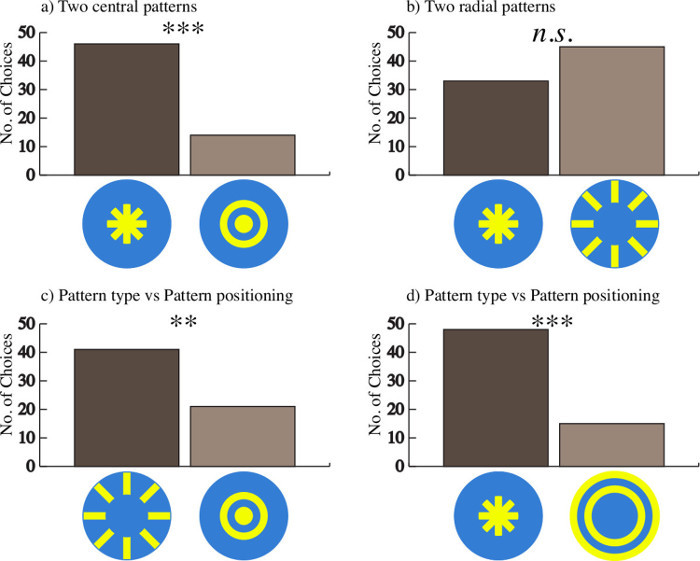 Figure 5. Motion-Sensitive Video Results. Choice frequencies at the four different flower combinations in Experiment 2. The results show the importance of pattern type over pattern positioning: Radial patterns were preferred even if the patterns were positioned peripherally. Values indicate the number of choices of the displayed pattern. Asterisks indicate a choice proportion that is significantly different from chance. Note. ** p < 0.01, *** p < 0.001. This figure has been modified from Orbán11.
Figure 5. Motion-Sensitive Video Results. Choice frequencies at the four different flower combinations in Experiment 2. The results show the importance of pattern type over pattern positioning: Radial patterns were preferred even if the patterns were positioned peripherally. Values indicate the number of choices of the displayed pattern. Asterisks indicate a choice proportion that is significantly different from chance. Note. ** p < 0.01, *** p < 0.001. This figure has been modified from Orbán11.
| Conditions | Session 1 | Session 2 | Session 3 | ||
| Colony 1 | Colony 2 | Colony 3 | Colony 4 | Colony 5 | |
| No. of Workers | 45 | 7 | 2 | 8 | 23 |
| No. of Choices | 151 | 25 | 2 | 20 | 65 |
Table 2. Descriptive Statistics of Motion-Sensitive Video Data. Total number of choices recorded at the artificial flowers in Experiment 2 for each colony, and the number of workers making these choices. This table has been modified from Orbán et al.11. Please refer to the manuscript for full details.
| Conditions | Pooled | Heterogeneity | ||||
| Gp | df | p | Gh | df | p | |
| Central-Radial vs Central-Concentric | 17.98 | 1 | 0.000 | 40.72 | 29 | 0.073 |
| Central-Radial vs Peripheral Radial | 1.85 | 1 | 0.173 | 53.63 | 39 | 0.060 |
| Peripheral Radial vs Central Concentric | 6.57 | 1 | 0.010 | 26.31 | 27 | 0.500 |
| Central Radial vs Peripheral Concentric | 18.18 | 1 | 0.000 | 41.92 | 37 | 0.256 |
Table 3. Inferential Statistics Motion-Sensitive Video Data. Experiment 2. This table has been modified from Orbán et al.11. Gp refers to significant deviation of a group proportion from chance, and Gh refers to the tests for individual differences (i.e., heterogeneity). Please refer to the manuscript for full details on the statistical tests.
Discussion
RFID technology enables studying hundreds of individual workers with ease and high precision, but the characteristics of the recorded behavior is different from observations by humans and video recordings. The choice behavior recorded by RFID can be described as floral exploration. This is a very strict criterion of preference compared to criteria used in other studies, such as approach8, entry into a maze-arm9,10, antennal reaction8, or landing on a pattern11,12. In order to compare the validity of choice behavior definitions, and to validate the new RFID method for unrewarded behavior, video recordings of landing were observed in Experiment 2. All choice measures are not equal: the RFID criterion as measured by floral entry, indicated that the visual property of pattern positioning is more important to bee choice, while the video data indicated that the visual property of pattern type is more important to bee choice.
One of the general challenges in studying unlearned choice behavior is that it is very difficult to attract flower naïve, untrained bees to artificial flowers that do not offer any pollen or nectar. Indeed, many of the previous experiments resorted to training bees in the testing environment on stimuli that are thought to be irrelevant to choice behavior at testing stimuli. RFID and motion-sensitive video recordings overcome this obstacle by allowing continuous recording, 24 hr a day, without the constant supervision of the researcher, and by increasing the sample size from 15–20 bees to several hundred bees. While unrewarded choices by untrained bees remain a rare occurrence, these new experimental design parameters make the observation possible.
Other improvements offered by these two techniques include the elimination of sample bias, the improvement of external validity, and tracking of individual differences. Sample bias may be introduced when only studying a dozen or so bees in a colony. There are significant differences in behavioral idiosyncrasies across individual workers even within the same colony that are likely missed because only those workers are observed that happen to “cooperate” with the researcher at a given time. Studying 15–20 bees in a colony of 300 or more bees, represents as little as 5% of the total colony, in which case sampling bias may be significant. Tagging and observing the behavior of all workers eliminates this issue altogether. The number of simultaneous stimuli choices can also be manipulated. We offered binary choices in our experiment for technical reasons, but single choice or several choice designs are also feasible.
In terms of external validity, studying bees in a laboratory environment has traditionally been highly artificial, which has impeded the generalizability of results. For example, researchers had to be present for data collection, bees had to forage in a testing environment one by one, and testing was restricted to a small time window. The new techniques described in this paper remove these artificial limitations by making the observation unsupervised and unrestricted. Finally, individual differences of behavior can be documented because we can ascertain whether these were repeated choices by a single bee or by several bees.
Motion-sensitive, high-spatial resolution camcorders have the edge over RFID techniques in terms of the flexibility of stimuli designs: the appearance of a visual stimulus can be almost any shape or form as long as the subject’s identification can be captured on at least a few frames. Processing videos is a little more time-consuming than processing RFID data because the identification needs to be read by the researcher, which requires manual inspection of each video clip. If the visual stimulus design can meet the constraints of RFID reader (i.e., the RFID tags on the bee must come to at least 3–4 mm of the RFID reader), then RFID technology has the edge over automated large-scale data collection. Qualitative research would likely continue to be favored by video analysis. As shown in this experiment, RFID readers can amass very large data sets that requires no manual coding. The slightly different advantages associated with each technique suggest that in the future they could be used in a complementary way.
The future of both technologies may lie in the precise quantification of rarely occurring behaviors. For example, one distinct possibility for future applications is to employ these techniques in greenhouses and other more naturalistic environments. The combination of naturalism and experimental control would allow addressing questions that were not possible to answer before. Broadly speaking, these techniques offer two new ways of observing behavior in a rigorous and efficient manner. RFID and motion-sensitive video are a significant step forward not just for researchers studying pollinators or insects, but these techniques may also appeal to other behavioral scientists.
Disclosures
The authors have no competing financial interests.
Acknowledgments
The experiments were supported by a grant from the Natural Sciences and Engineering Research Council of Canada to CMSP. We thank Koppert Canada for their bumblebee colony donations. Portions of this manuscript, including some figures and tables have been published in Naturwissenschaften11, and reproduced here with permission from Springer.
References
- Plowright CMS, Evans SA, Leung JC, Collin CA. The preference for symmetry in flower-naïve and not-so-naïve bumblebees. Learn. Motiv. 2011;42(1):76–83. [Google Scholar]
- Streit S, Bock F, Pirk CWW, Tautz J. Automatic life-long monitoring of individual insect behaviour now possible. Zool. 2003;106:169–171. doi: 10.1078/0944-2006-00113. [DOI] [PubMed] [Google Scholar]
- Chittka L. How human are insects, and does it matter. Formosan Entomol. 2011;31:85–99. [Google Scholar]
- Lihoreau M, et al. Radar tracking and motion-sensitive cameras on flowers reveal the development of pollinator multi-destination routes over large spatial scales. PLoS Biol. 2012;10(9):e1001392. doi: 10.1371/journal.pbio.1001392. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Brodbeck DR, Shettleworth SJ. Matching location and color of a compound stimulus: Comparison of a food-storing and a nonstoring bird species. J. Exp. Psychol. Anim. Behav. 1995;21(1):64–77. [Google Scholar]
- Srinivasan M, Lehrer M. Temporal resolution of colour vision in the honeybee. J. Comp. Physiol. A. 1985;157(5):579–586. doi: 10.1007/BF01351352. [DOI] [PubMed] [Google Scholar]
- Sokal RR, Rohlf FJ. In: Freeman WH, editor. New York, NY: 2011. [Google Scholar]
- Lunau K, Fieselmann G, Heuschen B, van de Loo A. Visual targeting of components of floral colour patterns in flower-naïve bumblebees (Bombus terrestris; Apidae). Naturwissenschaften. 2006;93(7):325–328. doi: 10.1007/s00114-006-0105-2. [DOI] [PubMed] [Google Scholar]
- Lehrer M, Horridge GA, Zhang SW, Gadagkar R. Shape vision in bees: Innate preference for flower-like patterns. Phil. Trans. R. Soc. B. 1995;347(1320):123–137. [Google Scholar]
- Thompson EL, Plowright CMS. How images may or may not represent flowers: picture-object correspondence in bumblebees (Bombus impatiens) Anim. Cognit. 2014. [DOI] [PubMed]
- Orbán LL, Plowright CMS. The effect of flower-like and non-flower-like visual properties on choice of unrewarding patterns by bumblebees. Naturwissenschaften. 2013;100(7):621–631. doi: 10.1007/s00114-013-1059-9. [DOI] [PubMed] [Google Scholar]
- Leonard AS, Papaj DR. X” marks the spot: The possible benefits of nectar guides to bees and plants. Funct. Ecol. 2011;25(6):1293–1301. [Google Scholar]