

Abstract
We study the spatial evolutionary public goods game (SEPGG) with voluntary or optional participation on a complete graph (CG) and on dense networks. Based on analyses of the SEPGG rate equation on finite CG, we find that SEPGG has two stable states depending on the value of multiplication factor r, illustrating how the “tragedy of the commons” and “an anomalous state without any active participants” occurs in real-life situations. When r is low ( ), the state with only loners is stable, and the state with only defectors is stable when r is high (
), the state with only loners is stable, and the state with only defectors is stable when r is high ( ). We also derive the exact scaling relation for r*. All of the results are confirmed by numerical simulation. Furthermore, we find that a cooperator-dominant state emerges when the number of participants or the mean degree, 〈k〉, decreases. We also investigate the scaling dependence of the emergence of cooperation on r and 〈k〉. These results show how “tragedy of the commons” disappears when cooperation between egoistic individuals without any additional socioeconomic punishment increases.
). We also derive the exact scaling relation for r*. All of the results are confirmed by numerical simulation. Furthermore, we find that a cooperator-dominant state emerges when the number of participants or the mean degree, 〈k〉, decreases. We also investigate the scaling dependence of the emergence of cooperation on r and 〈k〉. These results show how “tragedy of the commons” disappears when cooperation between egoistic individuals without any additional socioeconomic punishment increases.
The emergence and evolution of cooperation is central to understanding the evolution and human activity-associated dynamics. One of the most popular theoretical frameworks that is used to shed light on such issues is evolutionary game theory. Game theory has also been successfully applied in diverse fields such as evolutionary biology and psychology1, computer science and operations research2,3, political science and military strategy4,5, cultural anthropology6, ethics and moral philosophy7, economics8,9, traffic flow research10,11 and public health12. When preferences and goals of participating agents are in conflict, game theory can explain and predict interactive decisions13. The central aim of game theory research is to determine conditions needed for cooperation to emerge between egoistic individuals14,15,16. Two of the most famous models for game theory include the prisoner's dilemma (PD) and public goods game (PGG)17. While the PD for a pairwise interaction attracted the attention of biologists and social scientists, PGG for group interactions was the focus of studies in experimental economics18. The PGG was often studied to identify effects of collective action arising from joint group decisions. Although sometimes the group interactions can be modeled as repeated simple pair interactions as with the PD, the most fundamental unit of the game is irreducible multi-agent nature13,19,20. The PGG offers valuable insight into prevailing socioeconomic problems such as pollution, deforestation, mining, fishing, climate control and environmental protection13. In identifying potential solutions to these issues, PGGs with various strategies13,17,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47 have been suggested and studied. Economists have mainly studied PGG with two strategies, C and D, in which all agents participate and share a single common pool21,22,23,24.
In this report, we focus on a PGG with voluntary participation25 in which three strategic players (cooperators (C), defectors (D) and loners (L)) are considered. Each C contributes c to the common pool, whereas D attempts to exploit the resource at no cost. Then, each C gets the payoff PC as PC = rcnC/(nC + nD) − c, whereas each D obtains PD as PD = rcnC/(nC + nD). Here, nC (nD) denotes the number of C's (D's) participating in the game, and r(>1) is the multiplication factor, which describes synergistic effects of cooperation. In contrast, L refuses to participate in the game and relies only on private payoff σ. In this report the condition, 0 < σ < c(r − 1), is imposed25.
Recently, the spatial evolutionary PGG (SEPGG) has been intensively studied to understand how steady-state strategies emerge on various structures and to identify characteristic features of such steady-state strategies17,25,26,28,29,30,31,32,33. In the SEPGG, each agent is assigned to a node on a lattice or network. In a unit game of the SEPGG, only a randomly selected agent and its linked neighbors participate26. Then, in each update of the SEPGG, a randomly selected agent i adopts the strategy of a randomly selected neighbor j of i with a transition probability fij that depends on payoffs Pi and Pj17. The SEPGG studies have revealed interesting results such as cyclic dominance25,27, transition nature26, and payoff distribution28. The effects of underlying topology on the SEPGG properties17,28,29,30,31,32,33 have also been found, such as the spatial reciprocity on diluted networks34 and multiplex networks35,36,37,38,39,40.
Since the SEPGG on regular lattices and sparse networks has considered only local interactions, the number of participants in a unit game centered at a node i cannot exceed ki + 1, where ki is the degree (or coordination number) of i. Thus, the SEPGG on sparse networks is hardly a theoretical model of real-life examples with very large participants such as taxes, provision levels, tolls, user fees, etc.48. Such cases involving public resources which anyone can overuse can be mapped into “tragedy of the commons” problem49,50. However, SEPGG in which all agents participate in a unit game has been rarely studied. Thus, we focus on SEPGG with very large participants.
In this report, the SEPGG with three strategies on a complete graph (CG) and dense complex networks is considered to understand the SEPGG with large participants. The CG is a simple undirected graph in which any node on the graph is linked to all other nodes. Thus, the number of links on the CG is N(N − 1)/2, where N is the number of nodes. In the SEPGG on the CG, all agents participate in a unit game. From analytically exact rate equations of the SEPGG on the CG, two stationary states depending on r and N are found. The state with only L agents (or L-state) is stable for low  . The state with only D agents (or D-state) is stable for high
. The state with only D agents (or D-state) is stable for high  . r* at which the crossover from the L-state to the D-state occurs is analytically obtained and also confirmed by numerical simulation. In the SEPGG on the CG, a C-dominant state cannot be stable even for very high r. These stationary states on the CG are very peculiar compared to the C-dominant state (or C-state) on regular lattices and sparse networks for very high r28,30,31,32,33. The L-state on the CG is also very peculiar in the sense that the L-state occurs only for σ > c(r − 1) in the PGG game with the well-mixed population26, whereas the L-state on the CG occurs even when 0 < σ < c(r − 1) or r is quite high.
. r* at which the crossover from the L-state to the D-state occurs is analytically obtained and also confirmed by numerical simulation. In the SEPGG on the CG, a C-dominant state cannot be stable even for very high r. These stationary states on the CG are very peculiar compared to the C-dominant state (or C-state) on regular lattices and sparse networks for very high r28,30,31,32,33. The L-state on the CG is also very peculiar in the sense that the L-state occurs only for σ > c(r − 1) in the PGG game with the well-mixed population26, whereas the L-state on the CG occurs even when 0 < σ < c(r − 1) or r is quite high.
More specifically, the time evolution of the SEPGG on the CG for high r is shown to have the following stages. In early time, the numbers of both C and L agents decrease, whereas the number of D agents hardly varies. Eventually, the D-state becomes stable. Hence, the time evolution of the SEPGG for high r describes key processes to the “tragedy of the commons” very well49,50, because the key processes are the following processes: First, the most of agents overuse the public resource in the commons as defector. Then, the overuse of the public resource will ruin it.
Ref. 26 revealed that the dominant state on sparse networks for high r is the C-state. Hence, we investigate crossover behaviors of the L-state or the D-state on dense networks such as the CG to a C-state on sparse networks by numerical simulation. For low r, first the crossover from the L-state to a D-state occurs, and the D-state successively crosses over to a C-state as mean-degree 〈k〉 decreases. Furthermore, the D-state for moderate 〈k〉 remains even in the limit N → ∞. We also quantitatively find that cooperation gradually increases as the number of participants or 〈k〉 decreases, which is the origin of two crossovers. Hence, the crossovers for low r describe how the enhanced cooperation on sparse networks with low 〈k〉 overcomes “tragedy of the commons”, resulting in the C-state. For high r the direct crossover from the D-state to the C-state occurs. This direct crossover is nearly the same as that from the D-state to the C-state for low r.
Results
SEPGG on the complete graph
From fij in Eq. (11) using {Pi} on the CG, exact rate equations of densities on the CG are written as
 |
 |
and
 |
where  , etc.
, etc.
To obtain stationary states from general initial configurations with  ,
,  and
and  , early time behaviors of ρC, ρD, and ρL must be considered. Early time behaviors of ρC, ρD, and ρL are determined based on competition between two terms of Eqs. (1)–(3), respectively. As ρCρD tanh(−βc/2) ≤ 0 in Eq. (1) and ρCρD tanh(βc/2) ≥ 0 in Eq. (2) for any non-negative ρC, ρD, β and c, two distinctive steady states are achievable depending on the value of ρC. When
, early time behaviors of ρC, ρD, and ρL must be considered. Early time behaviors of ρC, ρD, and ρL are determined based on competition between two terms of Eqs. (1)–(3), respectively. As ρCρD tanh(−βc/2) ≤ 0 in Eq. (1) and ρCρD tanh(βc/2) ≥ 0 in Eq. (2) for any non-negative ρC, ρD, β and c, two distinctive steady states are achievable depending on the value of ρC. When  ,
,  in Eq. (1),
in Eq. (1),  in Eq. (2), and
in Eq. (2), and  in Eq. (3). Thus,
in Eq. (3). Thus,  and
and  , which make
, which make  in Eq. (1) and
in Eq. (1) and  after some time. From these relations we find that the state of {
after some time. From these relations we find that the state of { ,
,  ,
,  } appears when
} appears when  . Similarly, when
. Similarly, when  ,
,  and
and  , which also make
, which also make  in Eq. (3) and
in Eq. (3) and  after some time. As a result, when
after some time. As a result, when  , the state of {
, the state of { ,
,  ,
,  } appears. We call this state the D-state. In contrast, when
} appears. We call this state the D-state. In contrast, when  ,
,  and
and  , which make
, which make  in Eq. (2) and
in Eq. (2) and  after some time. Thus, the state of {
after some time. Thus, the state of { ,
,  ,
,  } appears. We call this state the L-state. As the D-state or the L-state appears depending on the condition
} appears. We call this state the L-state. As the D-state or the L-state appears depending on the condition  , we now examine the stability of the D-state based on rate equations (1)–(3). If the D-state is unstable, the L-state should be stable.
, we now examine the stability of the D-state based on rate equations (1)–(3). If the D-state is unstable, the L-state should be stable.
In the D-state with { ,
,  ,
,  }, the rate equation (1) becomes
}, the rate equation (1) becomes
 |
because  . By solving Eq. (4) for time t, we obtain
. By solving Eq. (4) for time t, we obtain
 |
Similarly, the rate equation (3) also becomes
 |
When  ,
,  and
and
 |
As ρC decreases with t, the condition  for the D-state breaks down for t > t*. From the Eq. (5) and the condition
for the D-state breaks down for t > t*. From the Eq. (5) and the condition  with
with  ,
,  . Therefore, on the CG with N → ∞, the L-state is the only stationary state. However, on the CG with finite N, the nonzero-minimum of ρL is 1/N and thus ρL = 0 if ρL(t) < 1/N. Therefore, if
. Therefore, on the CG with N → ∞, the L-state is the only stationary state. However, on the CG with finite N, the nonzero-minimum of ρL is 1/N and thus ρL = 0 if ρL(t) < 1/N. Therefore, if  , then ρL(t > t*) = 0 and the D-state is still the stationary state. These results mean that the SEPGG on the CG with finite N has the following stationary state. For
, then ρL(t > t*) = 0 and the D-state is still the stationary state. These results mean that the SEPGG on the CG with finite N has the following stationary state. For  , the D-state becomes stable, where
, the D-state becomes stable, where
 |
or
 |
More specifically, this D-state for high r or  has never been found on regular lattices and sparse networks. As emphasized in our introductory remarks, this state also describes “tragedy of the commons” very well. In contrast, for
has never been found on regular lattices and sparse networks. As emphasized in our introductory remarks, this state also describes “tragedy of the commons” very well. In contrast, for  , the L-state becomes stable. This L-state for
, the L-state becomes stable. This L-state for  has never been found on regular lattices and sparse networks either. The L-state is also anomalous and surprising, because no body remains as an active participant in the PGG for
has never been found on regular lattices and sparse networks either. The L-state is also anomalous and surprising, because no body remains as an active participant in the PGG for  . No C-dominant stationary state is found on the CG even for high r. Compared to the C-dominant stationary states on a square lattice17,26 and on sparse networks28,30,31,32,33 for high r, the stationary states on the CG are unique and anomalous.
. No C-dominant stationary state is found on the CG even for high r. Compared to the C-dominant stationary states on a square lattice17,26 and on sparse networks28,30,31,32,33 for high r, the stationary states on the CG are unique and anomalous.
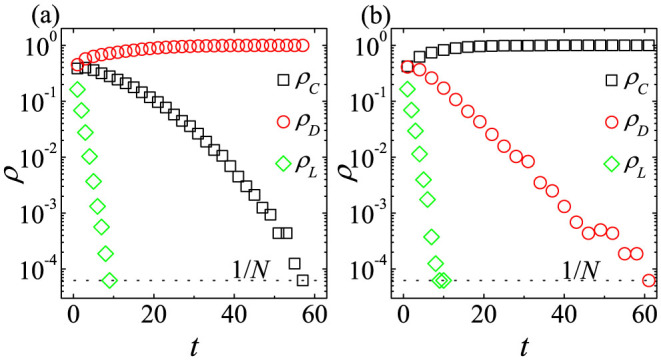
In Fig. 1, ρC(t), ρD(t), and ρL(t) from a single run of simulation on the CG with N = 105 are plotted. ρC(t) and ρL(t) decay exponentially in the early time regardless of the r value. For  , the time dependences of ρC(t) and ρL(t) are sustained throughout, and the stationary D-state eventually appears as shown in Fig. 1(a) (r = 2000). In contrast, when
, the time dependences of ρC(t) and ρL(t) are sustained throughout, and the stationary D-state eventually appears as shown in Fig. 1(a) (r = 2000). In contrast, when  , ρL(t) increases after some time or for t > t* and the L-state eventually appears as shown in Fig. 1(b) (r = 60). Hence, simulation data presented in Fig. 1 exactly reproduce the analytical results of rate equations (1)–(3). More specifically, early time behaviors of ρL ~ exp(−t) and
, ρL(t) increases after some time or for t > t* and the L-state eventually appears as shown in Fig. 1(b) (r = 60). Hence, simulation data presented in Fig. 1 exactly reproduce the analytical results of rate equations (1)–(3). More specifically, early time behaviors of ρL ~ exp(−t) and  are confirmed by fittings to simulation data as shown in Figs. 1(a) and 1(b). Furthermore, the crossover time t* for r = 60 is t* = 8.86 in Fig. 1(b), which is nearly identical to t* obtained from
are confirmed by fittings to simulation data as shown in Figs. 1(a) and 1(b). Furthermore, the crossover time t* for r = 60 is t* = 8.86 in Fig. 1(b), which is nearly identical to t* obtained from  .
.
Figure 1. Simulation results of the SEPGG on the CG.
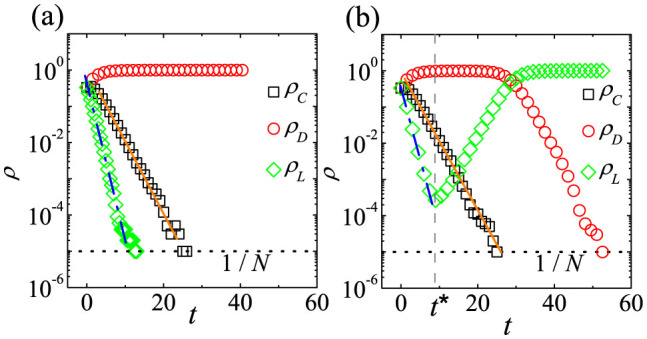
Plots of ρC(t), ρD(t), and ρL(t) of the SEPGG with c = 1, σ = 1, and β = 1 from a single simulation run with N = 105. The dotted horizontal line denotes the value of 1/N. (a) When r = 2000, the stationary D-state appears. By fitting the data to Eqs. (5) and (7), ρC ~ exp(~αCt) with  (solid line) and ρL ~ exp(−αLt) with αL = 1.00(2)(~1.0) (dash-dotted line) are obtained. (b) When r = 60, the stationary L-state eventually appears. The vertical dashed line denotes the value of
(solid line) and ρL ~ exp(−αLt) with αL = 1.00(2)(~1.0) (dash-dotted line) are obtained. (b) When r = 60, the stationary L-state eventually appears. The vertical dashed line denotes the value of  . By the fitting, ρC ~ exp(−αCt) with
. By the fitting, ρC ~ exp(−αCt) with  (solid line) and ρL ~ exp(−αLt) with αL = 0.97(4)(~1.0) (dash-dotted line) are obtained for t < t*.
(solid line) and ρL ~ exp(−αLt) with αL = 0.97(4)(~1.0) (dash-dotted line) are obtained for t < t*.
When  and in the limit of N → ∞, the time dependences of ρC, ρD and ρL on the CG shown in Fig. 1(b) effectively present the process to the anomalous L-state with no active participants. The process means the following three steps. First, most agents defect one another. C then changes his strategy to D, and ρC(t) decreases. Thus, D cannot receive enough payoff50, causing ρD(t) to decrease and ρL(t) to increase. Finally, most agents become L, as no one remains in the commons. Consequently, the stationary L-state eventually appears for
and in the limit of N → ∞, the time dependences of ρC, ρD and ρL on the CG shown in Fig. 1(b) effectively present the process to the anomalous L-state with no active participants. The process means the following three steps. First, most agents defect one another. C then changes his strategy to D, and ρC(t) decreases. Thus, D cannot receive enough payoff50, causing ρD(t) to decrease and ρL(t) to increase. Finally, most agents become L, as no one remains in the commons. Consequently, the stationary L-state eventually appears for  .
.
To analyze the dependence of stationary states on the multiplication factor r,  ,
,  , and
, and  are obtained from simulations for various N and r by averaging over 1,000 realizations. Simulation results of
are obtained from simulations for various N and r by averaging over 1,000 realizations. Simulation results of  and
and  for various N and r are shown in the insets of Fig. 2. As shown in insets of Fig. 2, the crossover value of r, i.e., r*, from the stationary L-state to the stationary D-state increases with N as expected from Eq. (9). More specifically,
for various N and r are shown in the insets of Fig. 2. As shown in insets of Fig. 2, the crossover value of r, i.e., r*, from the stationary L-state to the stationary D-state increases with N as expected from Eq. (9). More specifically,  and
and  in Fig. 2 exactly depend on the single scaling parameter r0 defined as
in Fig. 2 exactly depend on the single scaling parameter r0 defined as  . The scaling behaviors confirm that the L-state crosses over to the D-state at
. The scaling behaviors confirm that the L-state crosses over to the D-state at  as Eq. (9).
as Eq. (9).
Figure 2. Simulation results of the SEPGG on the CG for various r and N.
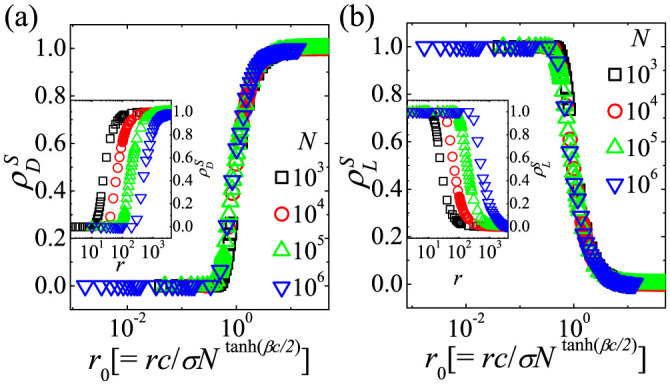
Plots of (a)  and (b)
and (b)  against
against  for N = 103, 104, 105, and 106. c = 1, σ = 1, and β = 1 are used. Inset of (a): Plots of
for N = 103, 104, 105, and 106. c = 1, σ = 1, and β = 1 are used. Inset of (a): Plots of  against r. Inset of (b): Plots of
against r. Inset of (b): Plots of  against r.
against r.
Crossover from the behavior on dense networks to that on sparse networks
A dense network is a network in which the mean-degree 〈k〉 satisfies 〈k〉 ∝ N51. For example, the CG is a typical dense network, as 〈k〉 = N − 1 in the CG. In a sparse network, 〈k〉 = finite51. In the SEPGG on the CG, either the L-state or the D-state is stable depending on r and N and the C-dominant state cannot be stable. In contrast, the C-dominant state is stable for relatively high r in the SEPGG on sparse networks such as random networks30,33 and two dimensional square lattices17,26. Therefore, it is interesting to study how crossover from the L-state and the D-state on dense networks to the C-dominant state on sparse networks occurs for given values of r and N.
We first investigate how the L-state on dense networks crosses over to the C-dominant state on sparse networks. Since the L-state is stable for low r0 on the CG as shown in Fig. 2, the crossover behaviors for low r0 are studied by simulations on random networks with 〈k〉. For a given N and 〈k〉,  ,
,  , and
, and  are obtained by averaging over 2,000 realizations. Typical crossover behaviors for r0 = 0.3 are shown in Fig. 3. As shown in Fig. 3(a), two crossovers occur successively as 〈k〉 decreases. The L-state is stable when 〈k〉 is quite high. The C-state of {
are obtained by averaging over 2,000 realizations. Typical crossover behaviors for r0 = 0.3 are shown in Fig. 3. As shown in Fig. 3(a), two crossovers occur successively as 〈k〉 decreases. The L-state is stable when 〈k〉 is quite high. The C-state of { ,
,  ,
,  } is stable when 〈k〉 is low enough. For moderate 〈k〉 the D-state is stable. Therefore, for low r0, the stationary state is first changed from the L-state to a D-state and crossover from the D-state to a C-state occurs as 〈k〉 decreases.
} is stable when 〈k〉 is low enough. For moderate 〈k〉 the D-state is stable. Therefore, for low r0, the stationary state is first changed from the L-state to a D-state and crossover from the D-state to a C-state occurs as 〈k〉 decreases.
Figure 3. Simulation results of the SEPGG on random networks for  .
.
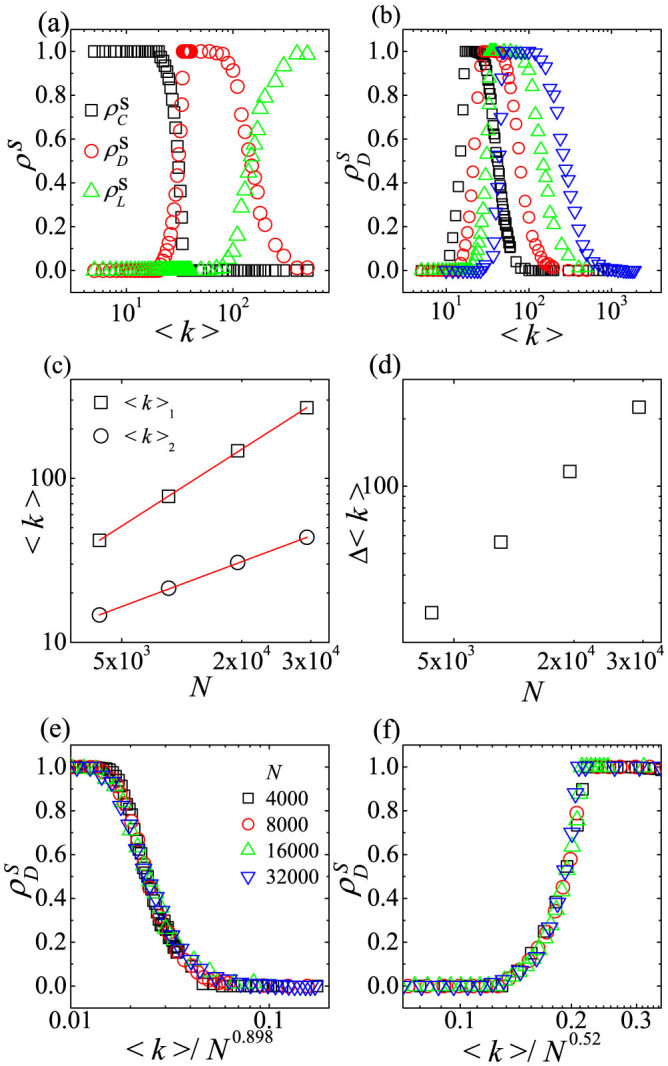
(a) Plots of  ,
,  , and
, and  against 〈k〉 for N = 16000. c = 1, σ = 1, and β = 1 are used. (b) Plots of
against 〈k〉 for N = 16000. c = 1, σ = 1, and β = 1 are used. (b) Plots of  against 〈k〉 for N = 4000, 8000, 16000, and 32000. Here,
against 〈k〉 for N = 4000, 8000, 16000, and 32000. Here,  and
and  are not shown, because
are not shown, because  for high 〈k〉 and
for high 〈k〉 and  for low 〈k〉. (c) Plots of 〈k〉1 and 〈k〉2 against N. The straight lines denotes fittings of
for low 〈k〉. (c) Plots of 〈k〉1 and 〈k〉2 against N. The straight lines denotes fittings of  with
with  and
and  with
with  to corresponding data. (d) Plot of Δ 〈k〉 (≡〈k〉1 − 〈k〉2) against N. (e) Plot of
to corresponding data. (d) Plot of Δ 〈k〉 (≡〈k〉1 − 〈k〉2) against N. (e) Plot of  against
against  with ν1 in (c). (f) Plot of
with ν1 in (c). (f) Plot of  against
against  with ν2 in (c).
with ν2 in (c).
The stability of the D-state for moderate 〈k〉 in the limit N → ∞ is studied using the following methods. From simulation data of  ,
,  and
and  as in Figs. 3(a) and 3(b), we first obtain 〈k〉1 at which relations
as in Figs. 3(a) and 3(b), we first obtain 〈k〉1 at which relations  and
and  hold simultaneously. We also obtain 〈k〉2 at which
hold simultaneously. We also obtain 〈k〉2 at which  and
and  hold. For example, dependences of 〈k〉1 and 〈k〉2 on N for r0 = 0.3 are shown in Fig. 3(c). The dependence of Δ 〈k〉 (≡〈k〉1 − 〈k〉2) is also shown in Fig. 3(d). As shown in Fig. 3(d), Δ 〈k〉 increases monotonically with N, guaranteeing the stability of the D-state for moderate 〈k〉 in the limit N → ∞. Furthermore, as shown in Fig. 3(c), 〈k〉1 and 〈k〉2 satisfy power laws
hold. For example, dependences of 〈k〉1 and 〈k〉2 on N for r0 = 0.3 are shown in Fig. 3(c). The dependence of Δ 〈k〉 (≡〈k〉1 − 〈k〉2) is also shown in Fig. 3(d). As shown in Fig. 3(d), Δ 〈k〉 increases monotonically with N, guaranteeing the stability of the D-state for moderate 〈k〉 in the limit N → ∞. Furthermore, as shown in Fig. 3(c), 〈k〉1 and 〈k〉2 satisfy power laws  and
and  . By fitting these power laws to data presented in Fig. 3(c), crossover exponents are obtained as ν1 = 0.898(2), ν2 = 0.520(2). The result ν1 > ν2 also guarantees the stability of the D-state for moderate 〈k〉. The crossover property from the L-state to the D-state presented in Fig. 3(b) is adequately described by the single exponent ν1 obtained in Fig. 3(c).
. By fitting these power laws to data presented in Fig. 3(c), crossover exponents are obtained as ν1 = 0.898(2), ν2 = 0.520(2). The result ν1 > ν2 also guarantees the stability of the D-state for moderate 〈k〉. The crossover property from the L-state to the D-state presented in Fig. 3(b) is adequately described by the single exponent ν1 obtained in Fig. 3(c).  for higher 〈k〉 and various N are plotted against the scaling variable
for higher 〈k〉 and various N are plotted against the scaling variable  with the obtained ν1 as in Fig. 3(e), which shows that
with the obtained ν1 as in Fig. 3(e), which shows that  for higher 〈k〉 is a function of the single scaling variable
for higher 〈k〉 is a function of the single scaling variable  . As shown in Fig. 3(f), crossover from the D-state to the C-state also satisfies the scaling property that
. As shown in Fig. 3(f), crossover from the D-state to the C-state also satisfies the scaling property that  for lower 〈k〉 is a function of the single scaling variable
for lower 〈k〉 is a function of the single scaling variable  with the obtained exponent ν2. Using the same method ν1's and ν2's for various low r0(<1) are obtained as shown in Fig. 4. Because ν1 > ν2 in Fig. 4, the D-state for moderate 〈k〉 and low r0(<1) is stable in the limit N → ∞.
with the obtained exponent ν2. Using the same method ν1's and ν2's for various low r0(<1) are obtained as shown in Fig. 4. Because ν1 > ν2 in Fig. 4, the D-state for moderate 〈k〉 and low r0(<1) is stable in the limit N → ∞.
Figure 4. Plots of exponents ν1 and ν2 against r0.
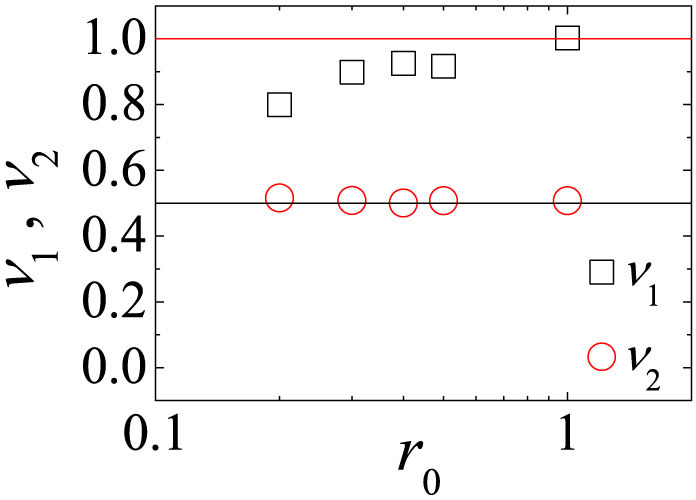
c = 1, σ = 1, and β = 1 are used. In the limit N → ∞, the D-state for moderate 〈k〉 is stable, because ν1 > ν2.
Furthermore, the dependences of  ,
,  , and
, and  on 〈k〉 for low r0 in Fig. 3(a) are quite similar to the time dependences of ρC(t), ρD(t), and ρL(t) on the CG for low r0 shown in Fig. 1(b). In Fig. 1(b), initially there are enough Cs. As t increases, D governs the system. Finally L dominates, because D cannot receive enough payoff. Likewise, in Fig. 3(a), for low 〈k〉 there are also enough Cs. For moderate 〈k〉 D governs the system. When 〈k〉 becomes high enough, L dominates. Hence, it is very interesting to compare dynamical behaviors on the CG to static crossover behaviors depending on 〈k〉.
on 〈k〉 for low r0 in Fig. 3(a) are quite similar to the time dependences of ρC(t), ρD(t), and ρL(t) on the CG for low r0 shown in Fig. 1(b). In Fig. 1(b), initially there are enough Cs. As t increases, D governs the system. Finally L dominates, because D cannot receive enough payoff. Likewise, in Fig. 3(a), for low 〈k〉 there are also enough Cs. For moderate 〈k〉 D governs the system. When 〈k〉 becomes high enough, L dominates. Hence, it is very interesting to compare dynamical behaviors on the CG to static crossover behaviors depending on 〈k〉.
We thus now focus on the time dependence of ρC(t), ρD(t), and ρL(t) for various 〈k〉 to understand crossover behaviors for low r0 in Fig. 3(a). The time dependences of ρC, ρD, and ρL for moderate 〈k〉 are shown in Fig. 5(a), and those for low 〈k〉 are shown in Fig. 5(b). For high 〈k〉, the time dependence is nearly identical to that on the CG shown in Fig. 1(b). For moderate 〈k〉 and high 〈k〉, ρC and ρL decrease, but ρD increases in early time. However, the stationary state is strongly affected by the subsequent time dependence of ρC. If 〈k〉 is quite high or if  , ρC decays quickly and ρD cannot receive enough payoff. As a result, ρL increases for t > t* and the stationary L-state appears as explained in Fig. 1(b). In contrast, for moderate 〈k〉 or
, ρC decays quickly and ρD cannot receive enough payoff. As a result, ρL increases for t > t* and the stationary L-state appears as explained in Fig. 1(b). In contrast, for moderate 〈k〉 or  , ρC(t) decreases relatively slowly, and ρL(t) never have a chance to increase reversely before the time at which ρL(t) ≤ 1/N [see Fig. 5(a)]. This means that the cooperation is effectively enhanced for moderate 〈k〉 and D receives enough payoff until L disappears due to the enhanced cooperation. This first crossover is quite similar to the crossover from the L-state in Fig. 1(b) to D-state in Fig. 1(a) on the CG. For low 〈k〉 or
, ρC(t) decreases relatively slowly, and ρL(t) never have a chance to increase reversely before the time at which ρL(t) ≤ 1/N [see Fig. 5(a)]. This means that the cooperation is effectively enhanced for moderate 〈k〉 and D receives enough payoff until L disappears due to the enhanced cooperation. This first crossover is quite similar to the crossover from the L-state in Fig. 1(b) to D-state in Fig. 1(a) on the CG. For low 〈k〉 or  , ρC(t) never decreases as on sparse networks28,30,31,32,33 [see Figs. 5(b)], and
, ρC(t) never decreases as on sparse networks28,30,31,32,33 [see Figs. 5(b)], and  . Hence, the crossover from the D-state to the C-state (or C-dominant state) occurs for 〈k〉 ~ 〈k〉2 as 〈k〉 decreases.
. Hence, the crossover from the D-state to the C-state (or C-dominant state) occurs for 〈k〉 ~ 〈k〉2 as 〈k〉 decreases.
Figure 5. Time dependence of ρC(t), ρD(t), and ρL(t) on random networks with N = 16000 for r0 = 0.3.
Plots of ρC(t), ρD(t), and ρL(t) (a) for moderate 〈k〉 ( = 30) and (b) for low 〈k〉 ( = 10). (a) For moderate 〈k〉 ( = 30), ρD increases with t, whereas ρC and ρL decreases. Finally, the stationary D-state emerges. (b) For low 〈k〉 ( = 10), ρC increases with t, whereas ρD and ρL decreases. Finally, the stationary C-state appears. The time dependences for high 〈k〉 are not shown, because they are nearly the same as those shown in Fig. 1(b).
The two crossovers for low r0 thus derive from a gradual increase of cooperation as the number of participants (or 〈k〉) decreases. Therefore, the crossovers that describe the disappearance of both the anomalous state with no active participants and “tragedy of the commons” quantitatively show that agents in the larger group hardly cooperate relative to those in the smaller group45,46. However, this dependence on the group size is not necessarily accurate, because a recent study on PGG44 reported that increasing the group size does not necessarily lead to mean-field behaviors.
Finally, we study the crossover from the D-state to a C-state for high r0(>1). Typical crossover behaviors for high r0 are shown in Fig. 6(a). As shown in Fig. 6(a), for high r0( = 10), the D-state is stable when 〈k〉 is quite high. The C-state is stable when 〈k〉 is low enough. Therefore, for high r0, the direct crossover from the D-state to the C-state occurs as 〈k〉 decreases. To analyze the dependence of this direct crossover on N,  for various N are obtained by simulation as shown in Fig. 6(b). The dependence of the direct crossover on N can be obtained by the ansatz
for various N are obtained by simulation as shown in Fig. 6(b). The dependence of the direct crossover on N can be obtained by the ansatz  , where at 〈k〉3 both
, where at 〈k〉3 both  and
and  hold. From the dependence of 〈k〉3 on N,
hold. From the dependence of 〈k〉3 on N,  is obtained for r0 = 10. This direct crossover satisfies the scaling property that
is obtained for r0 = 10. This direct crossover satisfies the scaling property that  is a function of the single scaling variable
is a function of the single scaling variable  with ν3 = 0.51. As shown in Fig. 6(d), ν3's for various high r0(>1) are obtained using the same method. The data in Fig. 6(d) show that the value of ν3 increases as r0 increases. As the D-state is always stable on the CG or dense networks with 〈k〉 ∝ N, the upper bound of ν3 should be equal to 1. We also confirm that the time dependences of ρC(t), ρD(t), and ρL(t) for high r0 are nearly the same as those in Fig. 1(a) for high 〈k〉 and as those in Fig. 5(b) for low 〈k〉, respectively. Hence, this direct crossover is nearly identical to the second crossover from the D-state to the C-state for low r0.
with ν3 = 0.51. As shown in Fig. 6(d), ν3's for various high r0(>1) are obtained using the same method. The data in Fig. 6(d) show that the value of ν3 increases as r0 increases. As the D-state is always stable on the CG or dense networks with 〈k〉 ∝ N, the upper bound of ν3 should be equal to 1. We also confirm that the time dependences of ρC(t), ρD(t), and ρL(t) for high r0 are nearly the same as those in Fig. 1(a) for high 〈k〉 and as those in Fig. 5(b) for low 〈k〉, respectively. Hence, this direct crossover is nearly identical to the second crossover from the D-state to the C-state for low r0.
Figure 6. Simulation results of the SEPGG on random networks for  .
.
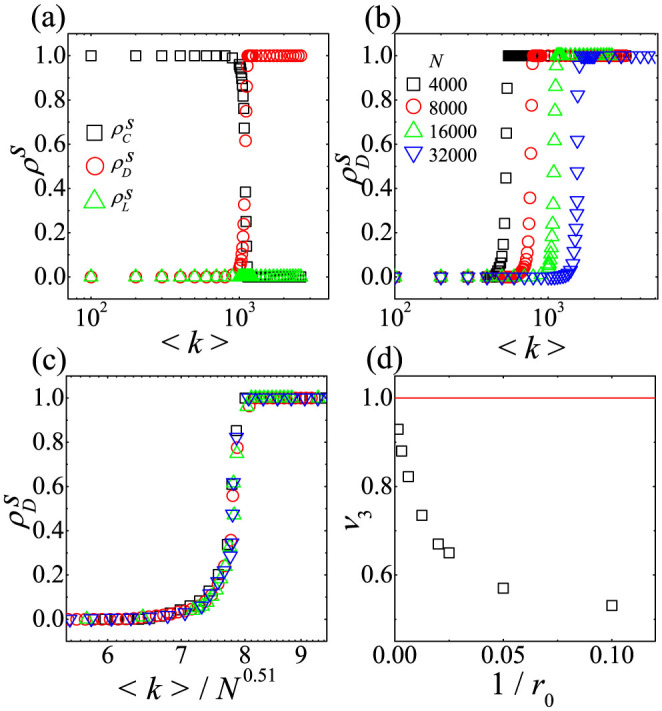
(a) Plots of  ,
,  , and
, and  against 〈k〉 for N = 16000. c = 1, σ = 1, and β = 1 are used. The stationary state is changed from the D-state to a C-state as 〈k〉 decreases.
against 〈k〉 for N = 16000. c = 1, σ = 1, and β = 1 are used. The stationary state is changed from the D-state to a C-state as 〈k〉 decreases.  for any 〈k〉. (b) Plots of
for any 〈k〉. (b) Plots of  against 〈k〉 for N = 4000, 8000, 16000, and 32000. (c) Plot of
against 〈k〉 for N = 4000, 8000, 16000, and 32000. (c) Plot of  against
against  with
with  . (d) Plot of ν3 against 1/r0.
. (d) Plot of ν3 against 1/r0.
Discussion
In summary, we have studied the SEPGG on the CG and complex dense networks to understand behaviors of the SEPGG with very large participants. By analyses of the rate equations, we have shown that the L-state of { ,
,  ,
,  } is stable on the CG for r < r* with
} is stable on the CG for r < r* with  . In contrast, the D-state of {
. In contrast, the D-state of { ,
,  ,
,  }, representing “tragedy of the commons”, is stable for r > r*. These analytic results on the CG have been confirmed by simulation.
}, representing “tragedy of the commons”, is stable for r > r*. These analytic results on the CG have been confirmed by simulation.
We have also studied crossover behaviors from the L-state or the D-state on dense networks to the C-dominate state on sparse networks by numerical simulation on random networks with a mean degree 〈k〉. For r < r*, the L-state first crosses over to a D-state, and successively this D-state crosses over to a C-state as 〈k〉 decreases. We have investigated the dependence of the crossovers on N for low r0 using the ansatz  and
and  , where the L-state is stable for
, where the L-state is stable for  , the D-state is stable for
, the D-state is stable for  , and the C-state is stable for
, and the C-state is stable for  . From the numerical simulations, ν1 and ν2 have been obtained. Since ν1 > ν2 for r < r*, we have found that the D-state for moderate 〈k〉 is stable even in the limit N → ∞. We have also studied the time dependences of ρC, ρD, and ρL on random networks with 〈k〉 to understand the crossover behaviors for r < r*. For moderate 〈k〉, the D-state is stable, because ρC decreases relatively slowly. For low 〈k〉, cooperation is enhanced and the C-state is stable. The two crossovers for r < r* derive from a gradual increase of cooperation as the number of participants (or 〈k〉) decreases. The crossovers thus show how the enhanced cooperation on sparse networks with low 〈k〉 produces the C-state, overcoming both the anomalous state with no active participants and “tragedy of the commons” for low r0.
. From the numerical simulations, ν1 and ν2 have been obtained. Since ν1 > ν2 for r < r*, we have found that the D-state for moderate 〈k〉 is stable even in the limit N → ∞. We have also studied the time dependences of ρC, ρD, and ρL on random networks with 〈k〉 to understand the crossover behaviors for r < r*. For moderate 〈k〉, the D-state is stable, because ρC decreases relatively slowly. For low 〈k〉, cooperation is enhanced and the C-state is stable. The two crossovers for r < r* derive from a gradual increase of cooperation as the number of participants (or 〈k〉) decreases. The crossovers thus show how the enhanced cooperation on sparse networks with low 〈k〉 produces the C-state, overcoming both the anomalous state with no active participants and “tragedy of the commons” for low r0.
For high r0, the D-state is stable when 〈k〉 is high. The C-state is stable when 〈k〉 is low. Therefore, for high r0, the direct crossover from the D-state to the C-state occurs as 〈k〉 decreases. The dependence of the direct crossover on N has been also analyzed by the ansatz  , where the D-state appears for
, where the D-state appears for  and the C-state appears for
and the C-state appears for  . From the numerical simulations, ν3 has been obtained. The value of ν3 increases to 1 as r0 increases, because the D-state always appears on the CG or dense networks with 〈k〉 ∝ N. The crossovers thus describe how the enhanced cooperation on sparse networks with low 〈k〉 overcomes “tragedy of the commons” and makes the C-state for high r0.
. From the numerical simulations, ν3 has been obtained. The value of ν3 increases to 1 as r0 increases, because the D-state always appears on the CG or dense networks with 〈k〉 ∝ N. The crossovers thus describe how the enhanced cooperation on sparse networks with low 〈k〉 overcomes “tragedy of the commons” and makes the C-state for high r0.
Finally, the cyclic dominance in Ref. 25 can also be found for very low r and 〈k〉. For example, for r0 = 0.1, the crossover from the C-state to the cyclic dominance occurs at  on the network with the size N = 104. This crossover behavior is not explained quantitatively here, because the crossover occurs only on sparse networks.
on the network with the size N = 104. This crossover behavior is not explained quantitatively here, because the crossover occurs only on sparse networks.
Methods
Let us define the SEPGG model on a given graph or network in detail. Each agent is assigned to a node on the network. Variable si of the agent on node i represents the strategy of i. The si is a cooperator (C), defector (D) or loner (L). The number of agents with a given strategy is denoted as  ,
,  , and
, and  , where N is the size of the network.
, where N is the size of the network.
In each update of SEPGG on the network, an agent i is randomly selected. Then, the payoff Pi of i depends on the strategies of ki + 1 participants, where ki is the degree of i. If ni,C is the number of agents with C, ni,D is the number of agents with D, and ni,L is the number of agents with L among the ki + 1 participants, ni,C + ni,D + ni,L = ki + 1. Pi is thus given by
 |
Here, c is the cost contributed by a C to the common pool, r(>1) is the multiplication factor and σ is the fixed payoff of a L26. We impose the condition 0 < σ < c(r − 1) as in Ref. 25. Even if only one active participant remains, the payoff of the agent still follows Eq. (10). Then, the strategy of i is updated through the comparison of Pi with Pj of a randomly selected neighbor j among ki neighbors in order to select a better strategy. If si ≠ sj, the agent i stochastically adopts the strategy sj of the neighbor j with transition probability fij. We use
 |
as in Ref. 17. Here β(≥0) controls the amount of noise. In each update of SEPGG, the payoffs in fij of Eq. (11) on regular lattices and sparse networks depend on the configuration of all the agents at the time of the update. In contrast, Pi in fij on the CG depends only on si and NC, ND, and NL, of the strategies on the entire graph, because all agents participate in each unit game. The payoff {Pi} on the CG is thus written as
 |
where the densities ρC(≡NC/N), ρD(≡ND/N), and ρL(≡NL/N) are used. To confirm the analytic results, simulations are performed for various N and r. Here, we mainly report the results of simulations with  , c = 1, σ = 1 and β = 1. Simulations with various combinations of
, c = 1, σ = 1 and β = 1. Simulations with various combinations of  ,
,  ,
,  , c, σ and β are tested and nearly identical results are obtained.
, c, σ and β are tested and nearly identical results are obtained.
Author Contributions
J.K., H.C., S.-H.Y. and Y.K. designed the study; H.C. performed the analytic calculation; J.K. performed the simulations and analyzed data; H.C., S.-H.Y. and Y.K. wrote the manuscript. All authors revised the manuscript.
Acknowledgments
This research was supported by Basic Science Research Program through the National Research Foundation of Korea(NRF) funded by the Ministry of Science, ICT & Future Planning (NRF-2013R1A1A2057791 and NRF-2012R1A1A2007430).
References
- Smith J. M. & Price G. R. The logic of animal conflict. Nature 246, 15–18 (1973). [Google Scholar]
- Ben-David S., Borodin A., Karp R., Tardos G. & Wigerson A. On the power of randomization in on-line algorithms. Algorithmica 11, 2–14 (1994). [Google Scholar]
- Frederic S. H. & Gerald J. L. Introduction to operations research (Mc Graw Hill, 2010). [Google Scholar]
- Downs A. An economic theory of democracy (Harper and Row, New York, 1957). [Google Scholar]
- Melvin D. Games of strategy: Theory and applications (RAND corporation, 2007). [Google Scholar]
- Henrich J. et al. Foundations of human sociality: Economic experiments and ethnographic evidence from fifteen small-scale societies (Oxford University Press, New York, 2004). [Google Scholar]
- Quine W. V. Carnap and logical truth. Synthese 12, 350–374 (1960). [Google Scholar]
- Neumann J. & Morgenstern O. Theory of games and economic behavior (Princeton university press, Princeton, 1953). [Google Scholar]
- Friedman J. W. Game theory with applications to economics (Oxford university press, New York, 1990). [Google Scholar]
- Tanimoto J., Fujiki T., Wang Z., Hagishima A. & Ikegaya N. Dangerous drivers foster social dilemma structures hidden behind a traffic flow with lane changes. J. Stat. Mech. 1742–5468, P11027 (2014). [Google Scholar]
- Perc M. Premature seizure of traffic flow due to the introduction of evolutionary games. New. J. Phys. 9, 3 (2007). [Google Scholar]
- Wang Z., Zhang H. & Wang Z. Multiple effects of self-protection on the spreading of epidemics. Chaos, Solitons & Fractals 61, 1 (2014). [Google Scholar]
- Szabó G. & Fáth G. Evolutionary games on graphs. Phys. Rep. 446, 97–216 (2007). [Google Scholar]
- Axelrod R. The evolution of cooperation (Basic Books, New York, 1984). [Google Scholar]
- Maynard S. J. Evolution and the theory of game (Cambridge university press, Cambridge, England, 1982). [Google Scholar]
- Nowak M. Evolutionary dynamics: Exploring the equation of life (Harvard university, Cambridge, MA, 2006). [Google Scholar]
- Hauert C. & Szabo G. Game theory and physics. Am. J. Phys. 73, 405 (2005). [Google Scholar]
- Kagel J. H. & Roth A. E. The Handbook of Experimental Economics (Princeton University Press, Princeton, 1995). [Google Scholar]
- Pacheco J. M., Santos F. C., Souza M. O. & Skyrms B. Evolutionary Dynamics of Collective Action in n-person stag hunt dilemmas. Proc. R. Soc. B 276, 315–321 (2009). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Perc M., Gomez-Gardenes J., Szoloki A., Floria M. L. & Moreno Y. Evolutionary dynamics of group interactions on structured populations: a review. J. R. Soc. Interface 10, 20120997 (2013). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Ledyard J. O. Public goods: a survey of experimental research (Princeton University Press, Princeton, 1995). [Google Scholar]
- Fehr E. & Gächter S. Cooperation and Punishment in Public Goods Experiments. Am. Econ. Rev. 90, 980–994 (2000). [Google Scholar]
- Fischbacher U., Gächter S. & Fehr E. Are people conditionally cooperate? Evidence from a public goods experiment. Econ. Lett. 71, 397–404 (2001). [Google Scholar]
- Fehr E. & Gächter S. Altruistic punishment in humans. Nature 415, 137–140 (2002). [DOI] [PubMed] [Google Scholar]
- Hauert C., De Monte S., Hofbauer J. & Sigmund K. Volunteering as Red queen mechanism for cooperation in public goods games. Science 296, 1129–1132 (2002). [DOI] [PubMed] [Google Scholar]
- Szabo G. & Hauert C. Phase transitions and volunteering in spatial public goods games. Phys. Rev. Lett. 89, 11801 (2002). [DOI] [PubMed] [Google Scholar]
- Szolnoki A. et al. Cyclic dominance in evolutionary games: A review. J. R. Soc. Interface 11, 20140735 (2014). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Francsco C. S., Marta D. S. & Jorge M. P. Social diversity promotes the emergence of cooperation in public goods games. Nature 454, 213–216 (2008). [DOI] [PubMed] [Google Scholar]
- Szabo G. & Hauert C. Evolutionary prisoner's dilemma games with voluntary participation. Phys. Rev. E 66, 062903 (2002). [DOI] [PubMed] [Google Scholar]
- Szolnoki A., Perc M. & Szabo G. Topology-independent impact of noise on cooperation in spatial public goods games. Phys. Rev. E 80, 056109 (2009). [DOI] [PubMed] [Google Scholar]
- Yang H., Wang W., Wu Z., Lai Y. & Wang B. Diversity-optimized cooperation on complex networks. Phys. Rev. E 79, 056107 (2009). [DOI] [PubMed] [Google Scholar]
- Zhang H., Liu R., Wang Z., Yang H. & Wang B. Aspiration-induced reconnection in spatial public-goods game. Europhys. Lett. 94, 18006 (2011). [Google Scholar]
- Ohtsuki H., Hauertm C., Lieberman E. & Nowak M. A A simple rule for the evolution of cooperation on graphs and social networks. Nature 441, 502–505 (2006). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Wang Z., Szolnoki A. & Perc M. Percolation threshold determines the optimal population density for public cooperation. Phys. Rev. E 85, 037101 (2012). [DOI] [PubMed] [Google Scholar]
- Wang Z., Szolnoki A. & Perc M. Rewarding evolutionary fitness with links between populations promotes cooperation. J. Theo. Biol. 349, 50–56 (2014). [DOI] [PubMed] [Google Scholar]
- Wang Z., Szolnoki A. & Perc M. Optimal interdependence between networks for the evolution of cooperation. Sci. Rep. 3, 2470 (2013). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Boccaletti S. et al. The structure and dynamics of multilayer networks. Phys. Rep. 544, 1 (2014). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Wang Z., Szolnoki A. & Perc M. Interdependent network reciprocity in evolutionary games. Sci. Rep. 3, 1180 (2013). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Wang Z., Szolnoki A. & Perc M. Evolution of public cooperation on interdependent networks: The impact of biased utility functions. Europhys. Lett. 97, 48001 (2012). [Google Scholar]
- Szolnoki A., Wang Z. & Perc M. Wisdom of groups promotes cooperation in evolutionary social dilemmas. Sci. Rep. 2, 576 (2013). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Helbing D., Szolnoki A. & Szabó G. Evolutionary Establishment of Moral and Double Moral Standards through Spatial Interactions. PLoS Comput. Biol. 6, e1000758 (2010). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Szolnoki A., Szabó G. & Cazkó L. Competition of individual and institutional punishments in spatial public goods game. Phys. Rev. E 84, 046106 (2011). [DOI] [PubMed] [Google Scholar]
- Szolnoki A. & Perc M. Correlation of positive and negative reciprocity fails to confer an evolutionary advantage: Phase transition to elementary strategies. Phys. Rev. X 3, 041021 (2013). [Google Scholar]
- Szolnoki A. & Perc M. Group-size effects on the evolution of cooperation in the spatial public goods game. Phys. Rev. E. 84, 047102 (2011). [DOI] [PubMed] [Google Scholar]
- Isaac R. M. & Walker J. M. Group Size Effects in Public Goods Provision: The Voluntary contributions Mechanism. Quart. J. Econ. 103 179–199 (1988). [Google Scholar]
- Huang Z.-G., Wu Z.-X., Wu A.-C., Yang L. & Wang Y.-H. Role of collective influence in promoting cooperation. Euro. Phys. Lett. 84, 50008 (2008). [Google Scholar]
- Chen X., Szolnoki A. & Perc M. Probabilistic sharing solve the problem of costly punishment. New. J. Phys. 16, 083016 (2014). [Google Scholar]
- Cornes R. & Sandler T. the theory of externalities public goods, and club goods (Cambridge university press, Cambridge, England, 1986). [Google Scholar]
- Hardin G. The tragedy of the commons. Science 162, 1243–1248 (1968). [PubMed] [Google Scholar]
- Hardin G. Extensions of “The Tragedy of the Commons”. Science 280, 682–683 (1998). [Google Scholar]
- Newman M. E. J. Networks. (Oxford university press, New York, 2010). [Google Scholar]