

Abstract
Two general approaches to the visual control of action have emerged in last few decades, known as the on-line and model-based approaches. The key difference between them is whether action is controlled by current visual information or on the basis of an internal world model. In this paper, we evaluate three hypotheses: strong on-line control, strong model-based control, and a hybrid solution that combines on-line control with weak off-line strategies. We review experimental research on the control of locomotion and manual actions, which indicates that (a) an internal world model is neither sufficient nor necessary to control action at normal levels of performance; (b) current visual information is necessary and sufficient to control action at normal levels; and (c) under certain conditions (e.g. occlusion) action is controlled by less accurate, simple strategies such as heuristics, visual-motor mappings, or spatial memory. We conclude that the strong model-based hypothesis is not sustainable. Action is normally controlled on-line when current information is available, consistent with the strong on-line control hypothesis. In exceptional circumstances, action is controlled by weak, context-specific, off-line strategies. This hybrid solution is comprehensive, parsimonious, and able to account for a variety of tasks under a range of visual conditions.
Keywords: action control, on-line control, off-line control, current information, internal model
1. Introduction
Locomotor and manual actions are fundamental to daily human interactions with a complex dynamic environment. The mechanisms underlying the perceptual control of action are of central importance to our understanding of both the function of perception and the organization of action. Two general approaches to visual control have emerged over the last few decades, often referred to as the on-line approach and the model-based approach. The fundamental difference between the two lies in the underlying basis for control. In on-line control, action is guided by current visual information that is available during the ongoing movement. In contrast, in model-based control, action is guided by an internal representation of the physical world and the actor. In this paper, we review the evidence regarding on-line and model-based control drawn from research on locomotion and manual actions, and arrive at some conclusions about the plausibility of each approach.
A primary role for current information in the control of action was originally emphasized by Gibson (1958, 1979). According to Gibson, various types of information are available to specify the properties of the environment. Detection of visual information by an attuned perceptual system enables humans to be aware of the specified environmental properties and to control their actions successfully with respect to those properties. As Gibson (1979) asserted, “Locomotion and manipulation … are controlled not by the brain but by information, that is, by seeing oneself in the world. Control lies in the animal-environment system.” Following Gibson's seminal work, the role of visual information in action control has been increasingly recognized (see Warren, 1998, 2009). A growing number of studies have identified specific optical variables and proposed control laws that couple action to the environment. For example, it has been shown that walking can be steered by using the currently available optic flow, which specifies one's heading relative to a target (Bruggeman, Zosh, & Warren, 2007; Warren, Kay, Zosh, Duchon, & Sahuc, 2001). The locomotor trajectory and even anticipatory behavior emerges from the actor-environment system as a consequence of lawful regularities governing the coupled system's behavior (Stepp & Turvey, 2010; Warren, 2006).
The concept of an internal model was introduced by Kenneth Craik (1943/1967) in his influential book, The nature of explanation. Craik proposed that the brain “imitates” a physical process by creating an “internal model of reality” with a similar “relation-structure,” thereby enabling prediction of external events in the physical world (p. 50-53, 81-82). In engineering, internal model control was developed to compensate for the time delays inherent in feedback control by incorporating an internal model of the controlled system (Conant & Ashby, 1970; Garcia & Morari, 1982). Similarly, internal models of the musculoskeletal system have been promoted in computational motor control (Kawato, 1999; Wolpert & Ghahramani, 2000), while world models have been incorporated into control architectures for mobile robots (Moravec, 1982; Thrun, 1997). Echoing Craik, Wolpert describes internal models as “putative neural systems that mimic physical systems outside the brain,” whose “primary role is to predict the behavior of the body and the world” (Davidson & Wolpert, 2005, p. S313; Wolpert & Ghahramani, 2000, p. 1212). The standard concept of an internal model thus satisfies Clark and Grush's (1999) description of a “full-blooded” representation: an inner surrogate for an extra-neural state of affairs that can be decoupled (at least temporarily) from ongoing environmental input. Wolpert and Ghahramani (2000) offer the analogy of predicting the future path of a thrown ball, using a model that includes the equations of projectile motion (Newton's laws), the fixed parameters of the system (gravitational constant, air resistance, ball diameter and mass), and takes information about the ball's initial state (position, velocity, spin) as input.
Whereas the on-line approach emphasizes the perceiver's coupling to the environment by means of optical information, the model-based approach emphasizes the role of an internal model of the world, including the environment and the actor's state. Successful action thus typically depends on a close correspondence between the physical world and its internal model. As an action unfolds, the state of the actor is continuously monitored based on sensory information and/or motor efference, and is used to update the world model. The primary role in controlling action – whether or not visual information is concurrently available – is thus played by an internal representation of the external world. There is evidence that action can be guided without concurrent visual information in some circumstances, which we will refer to as off-line control. For example, in the blind walking task, blindfolded participants are able to walk successfully to a target they have previously viewed. Loomis and Beall (1998, 2004) proposed that visual and other sensory input is processed to construct an internal 3D model of the environment, which they called “perceptual space.” Based on this internal model, they argued, locomotor behavior is planned and executed and the actor's state is updated in relation to the model. Results from the blind walking paradigm thus provide evidence that locomotion can be guided by some form of spatial memory.
One problem we face in trying to evaluate the two approaches is that the properties of internal world models are seldom clearly specified in the literature. Some internal models appear to have a wide scope, such as the laws of projectile motion or a detailed 3D model of the environment. Others are said to represent specific situations with a narrow scope, such as the extrapolated trajectory of a given object or the spatial location of a particular target. Sometimes specific knowledge of fixed parameters or constants, such as Earth's gravitational acceleration or a ball's diameter or elasticity, is also referred to as an internal model. We will reserve the term “internal model” for an inner surrogate that mimics an external physical process; constants do not meet this standard, although they can act as constraints on the calibration of optical variables or visual-motor control laws (Gómez & López-Moliner, 2013; Jacobs & Michaels, 2006). Further, the fidelity of an internal model, as well as its temporal duration, are rarely specified. This makes it difficult to operationalize and test the predicted accuracy, precision, and time course of model-based action. The hypothesis is thus rather unconstrained and its predictions quite malleable, to the point where it may be scientifically untestable (Chemero, 2009; Haselager, de Groot, & van Rappard, 2003; Hecht, 2001). We approach this problem by trying to conceptually clarify strong and weak positions and evaluating the empirical claims for on-line and model-based control made in the experimental literature.
Both the on-line and model-based approaches have something to contribute to our understanding of the control of action. The on-line approach contributes by identifying specific information in natural environments and characterizing control laws that map the information into movement control variables. Its advantage lies in its parsimony, in reducing the computational burden of constructing and simulating a high-fidelity world model to guide every movement. The proper domain of the on-line approach is, by definition, action that is controlled by currently available visual information; it does not purport to apply to off-line situations in which environmental information is unavailable, such as blind walking. Conversely, the natural domain of the model-based approach is action that is performed off-line without concurrent visual information, like blind walking. The primary question at issue is whether the model-based approach normally applies to both domains, even in the presence of visual information that could be used to guide action on-line. A secondary question is whether a full-blooded internal model is necessary to account for off-line control, or whether weaker strategies are sufficient. The advantage of a strong model-based view is that it provides a common account of visual-motor control under both conditions.
In what follows, we try to conceptually clarify and evaluate three hypotheses regarding the control of action under both normal vision and visual occlusion conditions. To introduce the hypotheses, consider the classic outfielder problem, in which a baseball player runs to catch a fly ball (Figure 1). The ball is launched at a given distance and flies in the general direction of the fielder. First, according to the strong on-line control hypothesis (Figure 2a), action is normally controlled on the basis of current visual information, without the involvement of an internal model (e.g. Chapman, 1968; McBeath, Shaffer, & Kaiser, 1995). This hypothesis implies that performance would deteriorate if vision were withdrawn, depending on the spatio-temporal demands of the task, but it does not aim to account for action control in the absence of visual information. One way to test this hypothesis is to eliminate the current information by visually occluding the ball, and to measure the fielder's subsequent behavior. If performance is significantly impaired under such conditions, it would suggest that the fielder ordinarily uses current visual information to control catching.
Figure 1.
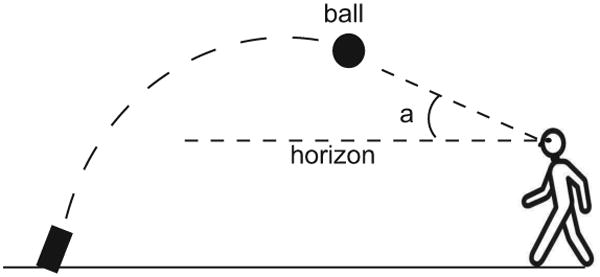
An outfielder catching a fly ball.
Figure 2.

The three hypotheses of action control.
Another test is to manipulate the visual information about the ball's flight and determine the control law that guides the fielder's behavior in real time. For example, the Optical Acceleration Cancellation (OAC) theory proposes that the fielder moves forward or backward so as to null the vertical acceleration of the ball's optical projection, and left or right to keep the ball in a constant bearing (CB) direction (Chapman, 1968; McLeod, Reed, & Dienes, 2006, Michaels & Oudejans, 1992). If the ball's current vertical optical velocity (dtana/dt in Figure 1) is increasing, the fielder should speed up in the backward direction, whereas if dtana/dt is decreasing, the fielder should speed up in the forward direction. By keeping the upward optical velocity approximately constant, the fielder will arrive at the right place at the right time to catch the ball. Indeed, experimental manipulation of the ball's trajectory produces adjustments by the fielder that are consistent with this on-line control strategy (Fink, Foo, & Warren, 2009; McLeod, Reed, Gilson, & Glennerster, 2008). This theory offers an illustrative example of anticipatory behavior arising from a specific coupling between actor and environment due to lawful regularities that govern the coupled system.
However, neither of these tests can rule out the possibility that current information is used to update an internal world model, which is in turn used to control action. On this hypothesis, information does not control action directly – only indirectly, via its effects on an internal model. Specifically, according to the strong model-based control hypothesis (Figure 2b), action is normally controlled by an internal world model. The world model is constructed using information about the physical environment and the actor's state, and is used to control action even when visual information is available. Under conditions of visual occlusion, the world model persists and continues to guide action. In the outfielder example (Figure 1), the fielder visually perceives the ball's initial distance and velocity, computes the ball's trajectory based on an internal model of the laws of projectile motion and knowledge of fixed parameters, and predicts its landing place and time (Saxberg, 1987). Consequently, the fielder should be able to catch the ball even when it is visually occluded shortly after launch. (We note that evidence for this particular theory is lacking: at outfield distances of 30 m, absolute distance and velocity are not accurately perceived, and even skilled baseball players cannot identify correct trajectories or predict landing points (Shaffer and McBeath, 2005).
A critical issue is how long an internal world model can be expected to persist and how accurately it can control behavior after decoupling from environmental information. If an internal model is assumed to decay rapidly, successful action would require continuous updating by current information. Withdrawal of information would thus lead to increasing model error, resulting in impaired performance – depending, of course, on the spatio-temporal demands of the task. Positing a short-lived world model thus renders strong model-based control indistinguishable from strong on-line control, because both require continuous visual input and predict degraded performance under occlusion. Hence, a rapidly-decaying internal model is not an empirically testable hypothesis. It is also a more complex one, for it is not clear what a continuously-updated internal model would add to the explanatory account if behavior can be controlled by environmental information directly. Finally, a rapidly-decaying internal model seems to undermine the raison d'etre of such an internal representation: to predict the state of the world when decoupled from environmental information. This proposal thus has obvious logical weaknesses, so we will assume that a world model persists long enough and is accurate enough to leave empirically measurable traces. We hope to shed some light on this issue by reviewing studies in which the duration of visual occlusion was manipulated.
The third hypothesis combines strong on-line control with a weak version of model-based control to account for action in the absence of vision. According to this hybrid control hypothesis (Figure 2c), action is ordinarily controlled on-line by current visual information. Under special conditions, such as when the target is occluded, its motion is stereotyped, or available information is inadequate, action may be guided by an alternative off-line strategy. The nature of this strategy is an open question: it might be as complex as full-blooded world model, but it is more likely a simpler strategy derived from previous experience with the task, such as a heuristic, a visual-motor mapping, or a rough spatial memory. Such a weak off-line strategy would complement on-line control without placing an undue computational burden on the visual-motor system.
Consider the outfielder problem once again (Figure 1). Imagine that a strong wind is blowing from fielder's left. If the fielder continuously tracks the ball, the OAC and CB theories predict adaptive on-line control of catching. But if the ball goes out of sight while the fielder is running, action must be controlled by an off-line strategy. For example, assume the fielder has learned from previous observations that flying objects tend to drift downwind. This could support a qualitative heuristic to veer rightward if the ball goes out of sight. Alternatively, the fielder might have learned a more specific mapping from the ball's horizontal optical velocity to the lateral component of running speed. Based on this mapping, the fielder could guide movement in approximately the right direction after the ball goes out of sight. Neither of these strategies guarantees a successful catch, and presumably on-line control would take over again if the ball comes back into view.
Thus, according to the hybrid hypothesis, on-line control is normally used when visual information is available. If this information is withdrawn, off-line heuristic or mapping strategies can be used, although they are likely to yield less accurate control and less successful action. But what distinguishes such off-line strategies from a full-blooded internal model? We maintain that model-based control differs from a heuristic or mapping strategy in two important respects. First, model-based control implies that intervening states of the world are internally “mimicked” or simulated with some degree of accuracy, such as computing intermediate positions on the ball's trajectory. This implies that the internally represented intervening states can be probed experimentally. In contrast, heuristics and mappings are based on relations between initial information and later environmental states or action variables, and thus intervening states of the world are not represented and cannot be probed. Second, a full-blooded internal model is generative and should transfer to new conditions within the model's domain, supporting accurate performance in novel situations. An internal model of projectile motion, for example, may be expected to generalize to unfamiliar initial conditions (ball distance, speed, launch angle) and even new tasks (catching with a butterfly net, moving a marker to the landing point) after the ball is occluded. In contrast, simple heuristic and mapping strategies are expected to be situation- and task-specific. A learned mapping between initial optical velocity and running forward or backward would only hold over a narrow range of launch angles, and would not transfer to catching with a net. It is difficult to distinguish such off-line strategies from a decaying internal model empirically, because they both predict degraded performance under occlusion conditions. However, experiments could be designed to probe whether intervening states are represented, or to test the domain of generalization to novel conditions.
In the remainder of this article, we proceed by reviewing relevant experimental studies on the visual control of locomotor and manual actions. The first section focuses on model-based control. Our purpose here is to determine whether a hypothesized internal world model is sufficient for accurate and precise control of action, or whether current visual information is necessary. These studies typically manipulate the availability of information and analyze performance under different visual conditions. In the second section, we review the on-line control literature, with the aim of determining whether current information is sufficient for accurate and precise action control, and whether action is normally guided on-line. In the third section, we consider the literature on anticipatory control in interception tasks, including off-line strategies such as heuristics and mappings. Finally, we use this evidence to evaluate the three main hypotheses about action control and draw preliminary conclusions.
2. Model-based control: Is an internal model sufficient?
According to the model-based approach, action is normally controlled on the basis of a 3D world model. This view implies that such an internal representation alone should be sufficient to control action in the absence of visual information, at a comparable level of performance, for some period of time. Numerous studies address this question by manipulating the availability of visual information. If visual input is withdrawn and task performance remains accurate and precise, this would imply that such an internal representation is sufficient to control action. But it would not imply that action is normally model-based when visual information is available. Conversely, if performance deteriorates, this would imply that concurrent visual information is necessary for normal levels of performance. But it would be agnostic as to whether the information is used to guide action directly or to update a short-lived internal model. Studies manipulating the duration of visual occlusion might shed some light on this question.
2.1.Visual occlusion leads to degraded performance
Research on visually directed action is often regarded as evidence for model-based control in human locomotion (Loomis & Beall, 2004; Loomis & Philbeck, 2008). For example, in the typical blind walking task, human participants briefly view a target on the ground at a distance, close their eyes, and walk without vision to the remembered target location. This task has been extensively investigated over the last three decades. It is usually reported that human actors are able to perform blind walking successfully with target distances up to 30 m (Loomis, DaSilva, Fujita, & Fukusima, 1992; Rieser, Ashmead, Talor, & Youngquist, 1990; Thomson, 1983). Participants are able to walk to the target location after viewing it for only 150 ms, and even without directly fixating the target (Philbeck, 2000). Successful performance is also observed in other directed walking tasks (Loomis et al., 1992; Philbeck, Loomis, & Beall, 1997). For example, in “triangulation by walking”, participants view a target at a distance and then walk blindfolded along an oblique path until instructed to turn and walk to the remembered target location – which they can do with reasonable accuracy (Philbeck et al., 1997). This result suggests that blind walking is based on a spatial memory of the target location in the environment and updating of the actor's position, not simply a perceived egocentric distance, a pre-planned action, or a visual-motor mapping.
Studies of visually directed walking thus indicate that humans are able to perform certain actions without guidance by concurrent visual information. However, they do not imply that action is normally model-based when such information is available. This question hinges on a comparison of blind walking performance with that of sighted walking. Moreover, null results must be interpreted cautiously, for the degree of error is likely to depend on the spatial demands of the task. Very few studies have directly compared walking in visual and nonvisual conditions. Thomson (1983) originally asked participants to walk to a previewed target with or without vision. Participants walked with similar accuracy and precision in both conditions for target distances of 9 m or less, but variability in walked distance increased dramatically in the occlusion condition for targets at 12 m or more. In Farrell and Thomson (1999), participants walked to a target line and placed the toe of a specified foot against the line. Variability in final toe position was significantly greater in the occlusion condition than that in the normal vision condition. One might expect larger differences for tasks that place greater demands on spatial memory. These studies indicate that visual occlusion leads to degraded performance compared with normal vision, with greater variability implying spatial uncertainty. Therefore, spatial memory alone cannot guide locomotion with the same precision, demonstrating an ongoing role for current visual information.
Driving a car is an everyday activity with greater spatio-temporal demands than locomotion on foot because of higher speed and more complex maneuvers. Initial reports indicated comparable driving performance under full vision and visual occlusion conditions when participants changed lanes on a straight road or negotiated a curve (J. Godthelp, 1985; H. Godthelp, 1986). For example, J. Godthelp (1985) investigated whether drivers can change lanes without continuous visual information. Measures of steering-wheel activity and the car's spatial path with full vision were compared with visual occlusion at start of the lane change. The occlusion duration lasted 1 s in a driving simulator and 3 s in a real car. In both cases, participants successfully performed lane changes under both the full vision and visual occlusion conditions.
With longer occlusion durations, however, greater performance degradation was subsequently observed (Cloete & Wallis, 2009; Wallis, Chatziastros, & Bülthoff, 2002; Wallis, Chatziastros, Tresilian, & Tomasevic, 2007). Wallis et al. (2002) asked participants to perform a lane change on a straight road in a driving simulator, under normal light or dark-tunnel conditions. In the tunnel, all visual information was removed and participants did not receive visual feedback about their performance. Participants were able to change lanes very well in normal light, but they could not successfully perform the task in the dark-tunnel condition, and usually failed to adjust their driving direction in the new lane. This failure persisted even when visual feedback was provided at the end of each trial.
One possible reason for the severe performance degradation in Wallis et al. (2002) is the extended visual occlusion, which lasted the whole course of lane change. Even with occlusion of 3 s, J. Godthelp's (1985) participants were usually in the midst of the lane change when visual information became available again, so they could make final corrections to their maneuvers in the new lane. However, in Wallis et al., visual information was removed during the entire lane change, so participants could not make visual corrections and were completely dependent on spatial memory.
To analyze the influence of visual occlusion duration on driving performance, Hildreth, Beusmans, Boer, and Royden (2000) tested a lane correction task in a driving simulator, in which the car's position was perturbed and the screen went blank, and the driver tried to steer back to the center of the lane. Errors began to accrue in the second phase of correction with visual occlusion of only 1.5 s, and variability in steering angle and lateral position in the first phase increased significantly at 4 s. The results indicate that even short occlusion durations yield a decline in performance, consistent with on-line control.
We recently investigated the effect of occlusion in a more demanding locomotor task, walking a slalom course of five targets (Zhao & Warren, 2013). Participants walked in a virtual environment while the visibility of the upcoming targets was manipulated and the walking trajectory was recorded. An analysis of the passing distance for each target revealed that increasing the number of visible upcoming targets from 1 to 5 did not improve steering accuracy or precision, indicating no advantage of a longer preview. In contrast, when the next upcoming target was visually occluded, performance significantly deteriorated, and greater errors were observed with occlusion of the upcoming two targets. The same pattern of results was observed by Duchon and Warren (1997) when participants steered a slalom course with a joystick. These results imply that steering is normally guided to the next target in an on-line manner, one target at a time.
So far, the findings for walking and driving appear to be consistent. Withdrawal of visual information generally leads to a decline in performance, although the effect of occlusion duration depends on the spatio-temporal demands of the task. This emphasizes the importance of current visual information for accurate and precise performance, consistent with on-line control. It also provides evidence of off-line control strategies that can be used in the absence of current information, based on spatial memory that decays rapidly over a few seconds. The outstanding question is the role of this current information: whether it normally controls action on-line, or is used to update an internal model that continually controls action.
The research on manual actions such as reaching or catching is consistent with the findings for locomotion. Manual actions differ from locomotor actions with respect to both effectors and spatial-temporal scale, and often demand higher accuracy and/or precision for successful performance. In early studies on catching, Whiting and colleagues (Sharp & Whiting, 1974; Whiting & Sharp, 1974) found that participants were able to perform a one-handed catching task successfully when the ball was visually occluded for a short duration (less than 280 ms) before interception. But longer occlusion durations led to significantly degraded performance.
Westwood, Heath, and Roy (2001) asked participants to reach to a target in the midsagittal plane. The target was either fully visible, or was occluded 0 to 2 s before the reaching signal and remained occluded during the reach. Visual occlusion during the reach resulted in greater endpoint errors, with longer occlusion times producing even greater errors. Similar effects of occlusion duration have been reported in other studies of manual reaching (Elliott & Calvert, 1990; Heath, Westwood, & Binsted, 2004).
Binsted, Rolheiser, and Chua (2006) examined the time course of the decay of the remembered location of a target. Participants were asked to repeatedly tap between two targets presented in the transverse plane. Both targets were illuminated for the first 5 s, and then disappeared for the remaining 6 s of a trial. Tapping was highly accurate when the targets were visible, but endpoint variability significantly increased immediately after they disappeared, and continued to increase through the occlusion period. This result is consistent with on-line control when visual information is available, and off-line control that decays rapidly after information is withdrawn.
Related studies have investigated the effect of intermittent vision on catching and reaching. In general, performance degrades significantly when the gap between visual samples is more than 80 ms (Bennett, Elliott, Weeks, & Keil, 2003; Bennett, Ashford, & Elliott, 2003; Elliott, Chua, & Pollock, 1994; Elliott, Pollock, Lyons, & Chua, 1995; Lyons, Fontaine, & Elliott, 1997). For example, Bennett et al. (2003) asked participants to catch an approaching tennis ball with visual samples of 20 ms separated by visual occlusion intervals of 0, 20, 40 or 80 ms. Catching performance with simultaneous binocular samples was unaffected by occlusion intervals of 0 to 40 ms, but performance deteriorated significantly with gaps of 80 ms, with both greater position error and a higher rate of failure. Thus, while continuous visual information may not be necessary for successful action, relatively short occlusion intervals significantly impair performance. This is quite consistent with on-line control, but would imply that any internal model of the ball's trajectory is extremely short-lived, raising doubts about strong model-based control.
An apparent exception is a study of catching by López-Moliner, Brenner, Louw, and Smeets (2010), in which balls were repeatedly tossed from a distance of 75 cm, with a mean flight time of 483 ms, and randomly occluded for 250ms. Occlusion did not affect the “quality” of the catch, as long as the ball's motion was visible at release or 400-200 ms before the catch. The results indicate that a continuous visual coupling is not necessary for this task; the ball's launch contained sufficient information to guide catching. Nonetheless, the authors concluded that movements are normally continuously adjusted and that performance is a smooth function of the time information is available. We will return to this observation in Section 4 on anticipatory control.
In sum, walking, driving, catching, and reaching tasks are generally impaired under visual occlusion conditions. Although some tasks can be performed successfully with short occlusion durations, it is consistently observed that longer occlusion leads to a larger decline in accuracy and/or precision. The magnitude of error obviously depends on the spatio-temporal demands of the task, and the literature demonstrates that more demanding tasks can produce significant errors with very short occlusion periods. This pattern of findings casts doubt on strong model-based control, for the evidence indicates that any such representation decays extremely rapidly upon withdrawal of visual information. At a minimum, such an internal model would have to be continuously updated, and hence model-based control also critically depends on current visual information. Thus, the occlusion paradigm indicates that an internal world model is by itself insufficient to account for the accuracy and precision of normal action; this level of performance appears to require concurrent visual information. Conversely, this observation is consistent with strong on-line control, the claim that action is normally controlled by current visual information.
2.2.Visual occlusion leads to a different movement pattern
In the previous section, we reviewed literature on task performance under visual occlusion conditions, leading to the conclusion that a world model alone is not sufficient to account for ordinary levels of performance. In this section, we consider research showing that the pattern of movement changes under visual occlusion.
A number of studies have reported that visual occlusion can influence the movement pattern in manual catching (Dessing, Oostwoud-Wijdenes, Peper, & Beek, 2009; Mazyn, Savelsbergh, Montagne, & Lenoir, 2007; Tijtgat, Bennett, Savelsbergh, De Clercq, & Lenoir, 2011). Mazyn et al. (2007) asked participants to catch an approaching ball with full vision and in a visual occlusion condition in which the ball was occluded at the onset of catching hand-movement. First, participants performed a block of 10 trials of visually-guided catching. Then, they were trained in the occlusion condition on blocks of 10 trials until they reached a criterion (catching 7 out of 10 balls), followed by another block of occluded trials. Number of successful catches significantly dropped in the first occlusion block compared to the full vision block, then improved in the last occlusion block, but remained worse than with full vision. Of greater interest is an observed change in the spatial and temporal characteristics of the catching movement. Compared to the full vision block, the movement was initiated significantly later in the first visual occlusion block, and even later in the last occlusion block. Similarly, the movement time significantly decreased and the peak wrist velocity increased in the first occlusion block, and even more so in the last occlusion block. The peak hand aperture also increased and participants caught the ball closer to their bodies in the visual occlusion condition, compared to the full vision condition. Thus it appears that participants postponed their response to keep the ball visible for a longer time, and the movement kinematics compensated for the late initiation. The peak hand aperture also increased to facilitate successful catching in the occlusion condition.
Delaying movement initiation in the occlusion condition thus served to maintain the visibility of the flying target, enabling participants to detect more information about its motion before it disappeared. The shorter movement time also produced a shorter occlusion time before the catch, reducing uncertainty about the target's trajectory. Increasing the hand aperture helped to compensate for remaining uncertainty about the ball's trajectory. These coordinated changes in the movement pattern suggest that the visual-motor system adapts to reduced information by seeking to maximize the period of on-line control, minimize the period of off-line control, and compensate for uncertainty about the target's motion. This pattern of results is consistent with the hypothesis that on-line control is the preferred mode of action guidance.
3. On-line control: Is current information sufficient?
Whereas model-based control emphasizes the role of an internal representation in guiding action, on-line control emphasizes the role of current visual information. The approach seeks to identify both the information that is used and the control laws that map that information into the control variables for action (Warren, 2006).
3.1.On-line control of locomotor behavior
According to the on-line approach, locomotion is normally controlled on the basis of current visual information, without relying on an internal representation such as a world model or a pre-planned path. Under normal circumstances, humans control their actions by detecting current information and coupling it to movement control variables in real time (with a visual-motor delay), avoiding the computational demands of maintaining an internal model and a path plan in a complex environment that is continuously changing.
Much evidence has shown that multisensory information is used to perceive one's current direction of travel (heading) and control steering, including optic flow (Bruggeman et al., 2007; M. G. Harris & Carré, 2001; Li & Cheng, 2013; Turano, Yu, Hao, & Hicks, 2005; Warren et al., 2001), proprioception (J. M. Harris & Bonas, 2002; Rushton, Harris, Lloyd, & Wann, 1998; Wilkie & Wann, 2003), and vestibular information (Butler, Smith, Campos, & Bülthoff, 2010). The steering dynamics theory developed by Warren and his colleagues (Fajen & Warren, 2003; Warren & Fajen, 2008) offers an existence proof that on-line control based on such information is sufficient to account for basic locomotor behavior, including steering to stationary and moving targets, and avoiding stationary and moving obstacles (see also Wilkie & Wann, 2003, 2005). Steering is treated as a nonlinear dynamical system that takes information about the current heading and the directions and distances of objects as input, and generates a new heading direction as output, without an internal representation of the environment or the future path.
Consider the example of steering to a stationary goal. Fajen and Warren (2003) modeled steering with a second-order differential equation in which the angular acceleration of turning is a function of the current difference between the heading direction and the goal direction (Φ − ψg) and the distance of the goal (dg):
| (1) |
This theoretical model can be thought of as an angular mass-spring system (Figure 3). The model effectively nulls the target-heading angle by creating an attractor of heading in the goal direction. The damping term −bΦ˙ reflects a frictional force that is proportional to the turning rate, preventing oscillations about the goal. The stiffness term −kg(Φ − ψg) reflects the observation that the strength of the attractor linearly increases with the target-heading angle. The stiffness is modulated by goal distance e−C1dg + c2, reflecting the observation that the attractor strength decays exponentially with distance.
Figure 3.
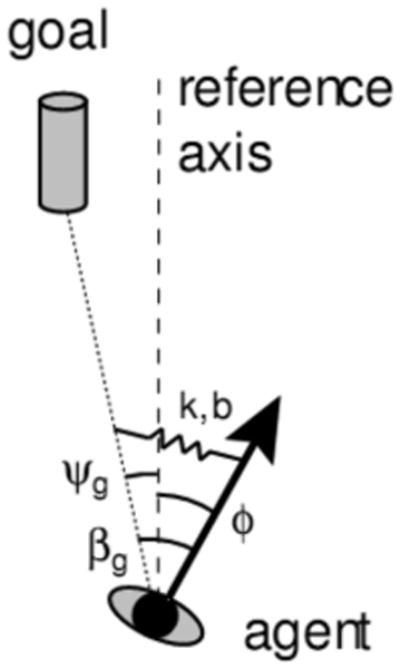
Definition of variables as an agent walks to a stationary goal: heading direction (Φ), goal direction (ψg), target-heading angle (βg = Φ − ψg), metaphorical spring stiffness (k) and damping coefficient (b). Adapted from Warren (2006).
Fajen and Warren (2003) found that this theoretical model closely reproduces walking trajectories as goal distance and target-heading angle are varied. Participants turned onto a straight path to the goal in the early part of a trajectory, and they did so earlier when the goal was closer and when the target-heading angle was greater. The model generalizes to new conditions with fixed parameter values (b, k, c1, c2). Moreover, similar components for other elementary behaviors have been developed, which can be linearly combined to account for more complex behavior (Warren & Fajen, 2008).
Taken together, the steering dynamics theory demonstrates that on-line control is sufficient to explain basic human locomotor behavior when concurrent information is available. Of course, it is also possible to create conditions that invoke off-line control, by removing environmental information (e.g. blind walking), imposing task demands that render the available information inadequate, or introducing a strategic element (e.g. team sports). But it does not follow that model-based strategies are normally used to guide locomotion when on-line control is sufficient.
3.2.On-line control of manual actions
It is widely observed that manual action is adjusted based on incoming visual information even after movement onset (Brenner & Smeets, 1997; Brenner, Smeets, & de Lussanet, 1998; Caljouw, van der Kamp, & Savelsbergh, 2006; Diedrichsen, Nambisan, Kennerley, & Ivry, 2004; Gosselin-Kessiby, Messier, & Kalaska, 2008; Sarlegna et al., 2003; Saunders & Knill, 2004, 2005). Brenner and Smeets (1997) found that participants rapidly adjust their hand movement to the target's perturbed position in a manual hitting task. Participants were asked to hit a stationary disk with a rod as soon as the disk appeared on a screen. In some trials, the disk was suddenly displaced to the left or right as participants initiated their hand movement. Hand trajectories indicated that participants shifted their hand movement toward the disk's new position about 110 ms after its displacement. In another study (Brenner et al., 1998), participants hit a moving target with a rod; on some trials, the target velocity suddenly increased or decreased after movement initiation. The results indicated that participants adjusted their hand movement on-line with a visual-motor delay about 200 ms, responding to the perturbation on the target's velocity.
Gosselin-Kessiby et al. (2008) required participants to first align their hand with the orientation of a target then reach to the target. Participants were explicitly instructed not to change their hand orientation during reaching, yet the initial alignment error was reduced during the reach. This result suggests that on-line adjustment of hand movements may be carried out involuntarily based on the available information.
In the previous section, we found that when manual tasks are performed under visual occlusion, performance typically deteriorates and movement patterns change to compensate for the loss of visual information (e.g. Mazyn et al., 2007). The results imply that an internal representation is by itself insufficient to account for normal levels of performance, inconsistent with model-based control. Conversely, the present studies indicate that manual actions are continuously guided by the available information and are rapidly adjusted in response to new information. The evidence thus demonstrates that current information is sufficient to account for the guidance of locomotor and manual actions, consistent with on-line control.
4. Anticipatory control of interceptive action: Is an internal model necessary?
To interact successfully and efficiently with a dynamic environment, action is often anticipatory. In this section, we will examine whether anticipatory control of interceptive action is based on current information, or whether some form of prediction based on an internal model is necessary. Two anticipatory control strategies have been proposed for interceptive action: predictive control, which is model-based, and prospective control, which is information-based1 (Lee & Young, 1985; Warren, 2006; Zago, McIntyre, Senot, & Lacquaniti, 2009). We note that these terms are used inconsistently in the literature, so we will define our usage here.
According to (1) predictive control, an internal world model is used to predict the future state of the environment based on input about its current state, and to plan an appropriate action. For instance, in the outfielder problem, the initial position and velocity of the ball would be input to an internal model of projectile motion, which would be used to compute the ball's trajectory, predict its landing place and time, and plan a running path to the interception point (Saxberg, 1987). Predictive control is thus a form of model-based control. In contrast, (2) prospective control (Lee & Young, 1985) guides anticipatory action based on current visual information, and is thus a form of on-line control. As pointed out by Peper, Bootsma, Mestre, and Bakker (1994), prospective control might be based on information that either (a) continuously guides action to a goal state, or (b) specifies the future spatio-temporal location of the goal state.
In the first case of prospective control, movement is guided by continuous control information that leads the actor to the goal state, in accordance with a control law (Bootsma & van Wieringen, 1990). The OAC strategy for catching a fly ball is a good example: optical acceleration does not specify the ball's future landing point, but continuously guides the actor to the right place at the right time. If the ball goes out of sight, guidance is lost, and action can continue on the established course but cannot be adaptively adjusted further. The level of performance thus depends upon the continuous availability of information, and if information is withdrawn, upon the spatio-temporal demands of the task.
In the second case, movement is guided by current information that specifies a future spatio-temporal state. Confusingly, this has sometimes been called “predictive information” (Lee, 1998; Morice, Francois, Jacobs, & Montagne, 2010; Peper et al., 1994); we will refer to it as prospective information. For example, under certain conditions, the relative rate of optical expansion (tau) of an approaching object specifies its time-to-contact (TTC) – the time that remains before a future collision (Lee, 1976; Hecht & Savelsbergh, 2004; Pepping & Grealy, 2007; but see López-Moliner & Keil, 2012; Tresilian, 1999; Wann, 1996). Instead of a future state being predicted by an internal model, the future state is specified by current information. The actor can thus sample the information in advance to coordinate action with a future goal despite occlusion, according to some control law. For instance, a prospective variable like tau can be used to guide subsequent action by parameterizing an attractor, to which the system relaxes without further input (Schöner, 1991; Warren, 2006). Note that prospective information like tau might be sampled discretely to initiate or control subsequent movement, or coupled continuously to adapt an unfolding action (Lee, Young, Reddish, Lough, & Clayton, 1983). In sum, prospective control -- whether it is based on continuously coupled or discretely sampled information -- is a form of information-based on-line control.
The concept of prospective information also offers a bridge to off-line control strategies such as mappings and heuristics. Whereas prospective information uniquely specifies a future state under normal task conditions and supports successful action, weaker relations between optical variables and future states may also exist. If specific information is unavailable, the visual-motor system can learn to exploit such regularities, which often hold in restricted contexts (see Michaels, Arzamarski, Isenhower, & Jacobs, 2008; Smith, Flach, Dittman, & Stanard, 2001). A heuristic is the weakest relation, a qualitative rule of thumb that serves to put action into the ballpark of the task goal. A mapping is a quantitative correlation between optical variables and action variables or goal-states that can be used to guide behavior. As an example, recall López-Moliner et al.'s (2010) observation that, when tossing a ball back and forth, random occlusion did not affect catching if the ball was visible at release. The authors conclude that catching is normally continuously controlled, but can be guided by the ball's initial motion if the trajectory is occluded. In this case, the situational constraints -- such as repeated throws at the same distance with similar release and catch heights – could make new regularities available: e.g. with a consistent launch speed, the arrival place and time would be correlated with the release angle. Thus, catching might be controlled by a learned mapping from release angle to arrival point, without invoking an internal model that generates the intervening trajectory.
In the remainder of this section we consider whether an internal model is necessary to explain anticipatory behavior in cases of locomotor and manual interception, or whether weaker heuristic and mapping strategies offer a viable alternative. In most cases, these alternatives have not been explicitly tested, so we suggest further analyses or tests that may reveal these strategies.
4.1.Locomotor interception
In locomotor interception tasks, the actor travels to intercept a target that is moving in the horizontal plane. In initial studies, participants travelled on a linear path (e.g. a track or a treadmill) and only controlled their speed. The results were consistent with the constant bearing (CB) strategy, such that speed was varied to keep the target in a constant direction in space, leading to successful interception (Chardenon, Montagne, Laurent, & Bootsma, 2005; Lenoir, Musch, Janssens, Thiery, & Uyttenhove, 1999; Lenoir, Musch, Thiery, & Savelsbergh, 2002). To study the control of both heading and speed, Fajen and Warren (2004) asked participants to intercept a moving target by walking in a virtual environment. Instead of heading toward the target's current position, participants led the target, maintaining it in a constant bearing direction. When tested against other possible control strategies, the CB strategy best explained the data, indicating that it is sufficient to account for locomotor interception (Fajen & Warren, 2007; but see Fajen, 2013).
Subsequently, Diaz, Phillips, and Fajen (2009) suggested that prediction might play a role in guiding interception. Participants used a foot pedal to control their simulated speed on a straight path, in order to intercept a moving ball displayed on a large screen. In the first experiment, after the target moved for 2.5 to 3.25s, it usually accelerated to new speed sampled from a normal distribution. Contrary to the CB strategy, participants learned to accelerate before the target actually changed its speed. In the second experiment, participants intercepted a target that moved on a linear, concave, or convex curvilinear path in the horizontal plane. On concave trials, participants accelerated early and then decelerated later in the trial, consistent with the CB strategy. But on convex trials, they also accelerated early as the target approached – contrary to the CB strategy – so that they did not lose the target as it turned later in the trial. The authors fit this data with a model that combined the CB strategy with a short-term prediction of the target's future motion (Δt = 0.5-3.5s), based on a learned internal model of the convex trajectory. In their theoretical model, travel speed is adjusted to null change in the bearing angle at that future time (t+Δt). Diaz et al. thus suggested that an internal model of the target's trajectory plays a role in guiding interception, together with the CB strategy.
However, the spatio-temporal demands of the trajectories in Diaz et al. (2009) were designed so that the CB strategy would often fail, and indeed participants missed the target on nearly half the trials (∼ 45% in the last block of both experiments). These are precisely the conditions that evoke off-line control strategies. In Experiment 2, participants appeared to use the CB strategy in conditions when it was likely to succeed (linear and concave paths), and another strategy when it was insufficient (convex path). They thus learned to anticipate the target's later motion by accelerating more than required by the CB strategy early in these trials. We suggest that this could be due to a situation-specific heuristic that depends on current information (but often fails): for example, rather than keeping the target's bearing angle constant, the bearing angle could be increased at a rate that depends on the target's initial motion.
In contrast, when it is possible to intercept the target successfully (80-90% of trials), behavior is consistent with the CB strategy (Bastin, Craig, & Montagne, 2006; Morice et al., 2010). Participants walked on a treadmill in a virtual environment displayed on a screen to intercept a ball that moved on linear, concave or convex paths. With the concave path, participants usually accelerated and then decelerated, whereas with the convex path they decelerated and then accelerated. People thus seem to prefer the on-line CB strategy when it is sufficient for the task. However, on half the trials Morice et al. (2010) marked the target's entire path with a colored stripe just below the ball; they also provided 36 training trials and feedback on successful interception. When the stripe was visible, participants learned to adjust their walking speed based on the target's TTC with the interception point, rather than the CB strategy. Marking the target's path during straight walking specified the interception point as well as the target's 3D trajectory and velocity, providing information about TTC. Although the authors conclude that control is based on predictive information for TTC, the data suggest continuous control of walking speed based on an evolving estimate of TTC, such as a learned mapping. Either way, an internal model of the target's trajectory need not be invoked to explain the results, because the trajectory was visually specified.
The work of Diaz et al. (2009) and Morice et al. (2010) implies that the CB strategy is not the only solution for locomotor interception: human actors are able to adopt different strategies under different conditions, demonstrating a certain flexibility in visual-motor control. Recall, however, that participants could only control their speed in these studies, whereas in normal locomotion both speed and heading must be controlled. Research by Owens and Warren (2010, described in Warren & Fajen, 2008) asked participants to intercept a target that moved on a circular path while walking in a virtual environment on the ground plane. The results indicated that participants usually walked a smoothly curved trajectory at a preferred speed to intercept the target, consistent with the CB strategy. When the target traveled repeatedly on the same circular path, some participants learned a heuristic after 6 to 10 trials: they took a short-cut across the circle and picked up the target on at the far side using the CB strategy. The heuristic was thus used during the early stage of interception when precise control was not essential, but the CB strategy phased in during the late stage when the spatio-temporal demands of the task were high. Yet when the target could move on two different circular paths, this heuristic was abandoned and participants reverted to the CB strategy for the entire interception path.
These results indicate that the constant bearing strategy is a basic, robust strategy for locomotor interception. Although heuristics can be learned under certain conditions, they are approximate, specific to those conditions, and unstable. Adopting a heuristic-then-online strategy in the context of a repeated target trajectory is a manifestation of the flexibility in human visual-motor control, yet it did not generalize to a highly similar situation with only two possible trajectories. Even when an off-line strategy is adopted, it appears to be a rough heuristic that applies in narrow contexts, rather than an accurate, generalizable world model.
4.2.Manual interception
Anticipatory manual interception might also be based on current visual information or an internal world model. Whereas locomotor interception takes place over several seconds and tolerates larger errors, manual interception often occurs within a second and demands a great degree of accuracy. Under such spatio-temporal demands, visual control faces the further difficulty of a visuomotor delay, the duration required for visual processing and action initiation (about 200 ms, Nijhawan, 2008) or modulation of ongoing action (100-200 ms, Bootsma & van Wieringen, 1990). Indeed, an early motivation for model-based control was the need to compensate for time delays inherent in sensory feedback by basing control on a predicted future state. Here we observe that prospective on-line control, or off-line heuristics and mappings, can serve the same function without invoking internal models.
Numerous studies indicate that online control is sufficient to account for manual interception of an approaching ball. Peper et al. (1994) considered two prospective control strategies for catching a ball on a linear approach path, which illustrate control by continuous and prospective information, respectively. According to the required velocity model, lateral hand velocity is continuously controlled by information about the current lateral distance between hand and ball, divided by the ball's current TTC, which evolves during the approach (Bootsma, Fayt, Zaal, & Laurent, 1997; Dessing, Bullock, Peper, & Beek, 2002; Dessing, Peper, Bullock, & Beek, 2005; Montagne, Laurent, Durey, & Bootsma, 1999). Other evidence appears to favor a control strategy based on prospective (“predictive”) information, in which the future passing distance of the approaching ball (in units of ball diameter) is specified by the ratio between its lateral optical velocity and its optical expansion; this ratio can also be used to continuously control lateral hand position (Arzamarski, Harrison, Hajnal, & Michaels, 2007; Craig et al., 2009; Jacobs & Michaels, 2006; Michaels, Jacobs, & Bongers, 2006).
Note that the second strategy presumes that the ball's diameter is known, based on previous experience with the ball. Indeed, Peper et al. (1994) reported over- and under-estimates of passing distance with unexpected ball sizes, but not with specified ball sizes. A constant like ball diameter does not meet the criterion of an internal model, but it can provide a context-specific constraint on the calibration of the optical ratio that specifies passing distance. That is, the learned scaling constant that maps the optical ratio to hand position depends on whether one is playing baseball or softball. In sum, there is no reason to introduce an internal model of the ball's trajectory in order to account for these manual interception data.
The need for an internal model has been more pointedly raised in the case of catching a free-falling object, where gravitational acceleration significantly influences the timing of interception. Although the tau variable was originally proposed to specify TTC with an object moving at a constant velocity, Lee et al. (1983) argued that it could also be used to control timing when hitting an accelerating object. A ball was dropped from different heights toward a participant who leapt up to punch it. The results indicated that the timing of leg and arm movements was geared to the first-order estimate of TTC given by tau, which evolved during the movement. This suggested that prospective information is used to control interception on-line, even with accelerating objects.
In contrast, Lacquaniti and his colleagues argued that interception of a free falling object is predictively controlled based on an internal model of earth's gravity (Lacquaniti & Maioli, 1989a, 1989b; McIntyre, Zago, Berthoz, & Lacquaniti, 2001; Senot, Zago, Lacquaniti, & McIntyre, 2005; Zago et al., 2004). For example, McIntyre et al. (2001) asked participants to catch a ball that was projected downward with three initial velocities from a height 1.6m above their hand. On Earth, catching responses and anticipatory peak bicep EMG activity were closely synchronized with the arrival of the ball regardless of its initial velocity. But when the task was performed in microgravity (about 0 g) on board the space shuttle, participants still appeared to correct for Earth's gravitational acceleration: the peak bicep EMG occurred earlier before contact, inconsistent with using first-order TTC or the ball's actual motion. Considering that object acceleration is poorly perceived (Brouwer, Brenner, & Smeets, 2002, Werkhoven, Snippe, & Toet, 1992), the authors proposed that a “second-order internal model of gravity” including “knowledge about the law of motion” is used to predict the movement of a falling object.
Baurès, Benguigui, Amorim, and Siegler (2007; Hecht, 2001) argued that the results are actually consistent with a heuristic strategy based on qualitative knowledge of the effects of gravity (e.g. “falling objects speed up”) to modulate action timing, and do not require an internal model of gravitational motion. Indeed, the authors (Zago, McIntyre, Senot, & Lacquaniti, 2008) subsequently backed away from a strong model-based interpretation, concluding that their findings were “indicative of a rather unsophisticated model of effects of gravity,” and stressing “the notion of implicit, approximate, probabilistic knowledge of the effects of gravity on object motion, as opposed to the notion of explicit, precise, analytic knowledge of Newtonian mechanics.”
Related studies have shown that continuous visual information is not necessary to intercept an object in free fall (Katsumata & Russell, 2012; Lacquaniti & Maioli 1989a). Lacquaniti and Maioli (1989a) reported that participants were able to catch a ball that was dropped from different heights and was occluded after its release. But in contrast to the visible condition, they did not produce consistent anticipatory EMG activity in the occlusion condition, casting doubt on the internal representation of intervening states. Moreover, participants could have learned a simple mapping from the three drop heights to the three drop durations in early trials, and used it to control the timing of interception in the occlusion condition (Baurès et al., 2007). Indeed, in a study of virtual ball bouncing, Siegler, Bardy, and Warren (2010) found that participants use the duration of the ball's ascent to control the timing of racket motion during the ball's descent. Consequently, they immediately adjust racket motion to a covert change in the gravitational constant, demonstrating that movement is not controlled based on an internal model of Earth's gravity.
Such a temporal mapping strategy could also be used to intercept fast-moving objects when there is insufficient time to detect information about the trajectory. In major league baseball, for example, a fastball takes about 410 ms from release to arrive at the plate, and passes the batter at speeds approaching 100 mph (44.7 m/s). The batter's pre-swing usually begins about 200 ms before the ball's arrival. Thus, the batter must rely on brief visual information early in the ball's flight, sometimes prior to release, to control hitting, rendering continuous control information insufficient.
Gray (2002) asked experienced baseball batters to hit a simulated approaching baseball displayed on a screen. The ball was launched horizontally from constant height (1.8 m) and distance (18.5 m) and was only affected by the force of gravity. In the first experiment, pitch speed varied randomly over a large range (28.2-35.8 m/s, flight times 500-650 ms). The temporal accuracy of hitting was much better than the spatial accuracy. When only slow and fast pitches (about 31.3 and 38.0 m/s) were presented in the second experiment, spatial accuracy significantly improved and batters hit significantly more balls. If batting were based on an internal model of each trajectory, there is no reason to expect such an improvement. Alternatively, it is possible that restricting the number of trajectories allowed participants to learn a situation-specific mapping from the two initial optical motions to two spatial positions for the swing. By contrast, in the first experiment the variation in initial conditions may have been too great to learn a mapping in 60 trials. One might expect experienced batters to already possess such mappings based on their experience with a wide range of natural conditions, but the simulated conditions were not natural (e.g. the pitcher was not visible) and different situation-specific mappings were available.
In addition, a pitch sequence effect was observed in the second experiment. For example, performance on a fast pitch was better when it followed several fast pitches than when it followed several slow pitches. The authors explained this as an expectancy effect, but learning a mapping could provide a mechanism for such an effect. Specifically, a fast-pitch mapping may be activated and tuned by a sequence of fast pitches, resulting in better performance on the next fast pitch. Switching to a slow-pitch mapping would depend on the first couple hundred milliseconds of the next pitch, incurring a cost in performance that would improve over subsequent slow pitches.
Recently, Hayhoe and her colleagues (Diaz, Cooper, & Hayhoe, 2013; Diaz, Cooper, Rothkopf, & Hayhoe, 2013; Hayhoe, McKinney, Chajka, & Pelz, 2012; Hayhoe, Mennie, Sullivan, & Gorgos, 2005; also Land & McLeod, 2000) have reported anticipatory eye movements in ball interception tasks. They proposed that an internal model of the world's dynamics is constructed and used to predict upcoming events and plan movements. For example, Diaz, Cooper, Rothkopf, et al. (2013) asked participants to hit a ball with a racquet in a virtual environment, after it bounced once on the ground. The ball traveled a constant distance on three sets of parabolic trajectories and then bounced near a fixed location (about 3.25 m away); the ball's elasticity determined the ratio of prebounce to postbounce vertical velocity, and was changed half-way through the experiment (after 208 trials). Participants usually tracked the ball after it was released, made a downward saccade about 150-200 ms before the bounce and maintained that gaze direction until the ball bounced back up near the line of sight, after which they tracked the ball again before hitting it. Analysis revealed that, given the ball's elasticity and pre-bounce velocity, the fixed gaze direction was close the ball's post-bounce trajectory about 170 ms after the bounce. The authors suggested that participants made predictive saccades based on an internal model of the ball's dynamics.
We note, however, that the ball's post-bounce trajectory spanned a rather large visual angle, and thus the saccade did not need to be very accurate or precise to arrive near this trajectory. This suggests that a simple mapping might be learned from the three initial trajectories to three saccade targets for each ball elasticity, to maintain a 170 ms interval. Such a mapping strategy may be able to account for anticipatory saccades more parsimoniously than assuming a generative dynamic world model. Potential tests of this alternative include analyzing the accuracy and precision actually required for successful and unsuccessful saccades in this task, and determining whether experience with one set of ball trajectories generalizes to new trajectories or requires learning a new mapping.
Overall, there is little evidence to suggest that an internal model of gravity or elasticity is necessary to explain control of manual interception. In general, interception appears to be controlled on-line by visual information when it is available. In certain circumstances, when information is unavailable (e.g., visual occlusion), near threshold (e.g. baseball batting), or object trajectories are limited, context-specific heuristic or mapping strategies appear be learned. The advantage of these simple strategies over an accurate internal model is their parsimony in explaining interception behavior. However, it is a challenge to empirically distinguish hybrid on-line and off-line control from a predictive internal model that is continually updated by current information. To do so, experiments should be designed to probe the representation of intervening states expected under predictive control, analyze situation-specific correlations that may reveal heuristic and mapping strategies, and test the domain of generalization they predict.
5. Discussion
How is human action ordinarily controlled? We have reviewed the experimental literature on two general approaches to the control of action, the on-line approach and the model-based approach. We close by taking stock of the evidence for each.
5.1.Strong model-based control
The model-based approach seeks to account for the control of action based on an internal world model. In particular, the strong model-based hypothesis states that vision is used to construct an internal model of the environment and the actor, and action is controlled exclusively based on this world model, whether or not visual information is concurrently available. However, the properties of an internal world model are seldom clearly specified, making the hypothesis difficult to test.
Successful performance in visually directed action such as blind walking is regarded as an existence proof of an internal world model. However, it does not follow that such a world model guides walking when the eyes are open. Indeed, the literature shows that performance with vision is significantly more precise than performance without vision, increasingly so as the spatio-temporal demands of the task increase. Moreover, it is widely reported that longer occlusion times lead to progressively impaired performance. These findings imply that a world model by itself is not sufficient to guide action, contrary to the strong model-based control hypothesis. The difficulty is that the temporal persistence of a world model is unspecified, and thus degraded performance under occlusion, no matter how rapid, can be attributed to the decay of an internal model.
A world model is often posited to account for anticipatory actions as well, for example in locomotor or manual interception of a moving target. On this view, interceptive actions are predicatively controlled, where the prediction is based on an internal model of the target's motion or object dynamics. We suggest that these results may be explained either by prospective on-line control, or else simpler heuristic or mapping strategies. Generally speaking, the existing data are insufficient to justify the strong model-based control hypothesis in the face of more parsimonious explanations.
In sum, without clear specification, the existence and role of an internal world model are difficult to operationalize and test empirically. First, the content and scope of the concept are very broad. In the literature we reviewed, a world model could be a spatial memory (e.g., Loomis & Beall, 2004), a model of Earth's gravitational acceleration (e.g., McIntyre et al., 2001), knowledge of an object's dynamic properties (e.g. ball elasticity in Diaz, Cooper, Rothkopf, et al., 2013), or a spatiotemporal model of a specific trajectory (e.g. a convex path in Diaz et al., 2009). Second, the expected accuracy and temporal persistence of an internal world model are unspecified. Although humans can perform certain tasks under visual occlusion, longer occlusion usually leads to progressive deterioration in performance. If model decay is rapid and requires frequent visual updating, at some point the model-based hypothesis collapses into the on-line control hypothesis, for action is strongly dependent upon current information. In such cases, we conclude that on-line control is more parsimonious than model-based control.
Taken together, the hypothesis of an internal world model as used in the literature appears to be too ill-specified to serve as a useful scientific hypothesis, subject to operationalization and empirical test (Haselager et al., 2003; Hecht, 2001). Thus, it is no longer sufficient to invoke the concept casually. It is incumbent upon proponents of model-based control to formally specify a proposed internal model, operationalize its predictions, and compare it with alternative hypotheses.
In conclusion, there is little evidence to support the use of model-based control when visual information is concurrently available. When visual information is removed, task performance deteriorates rapidly, implying that an internal world model alone is not sufficient to guide action. Both approaches thus recognize that current information is necessary for normal levels of performance, given the spatio-temporal demands of the task. Under these circumstances, positing an internal world model is gratuitous. Even proponents of the concept (Zago et al., 2008) have conceded the lack of support for “precise, analytic knowledge” and accepted “unsophisticated, approximate knowledge” that we would term heuristic. We conclude that the evidence militates against the strong model-based hypothesis.
5.2.Strong on-line control
The strong on-line control hypothesis states that action is controlled on the basis of current visual information, when such information is available. The literature review demonstrates that visual information is sufficient to account for on-line control of a number of locomotor and manual tasks. In addition, performance tends to be progressively impaired by longer visual occlusion, indicating that current information is necessary for normal levels of performance. These findings support the conclusion that human action is normally controlled by current information, consistent with the strong on-line control hypothesis.
Whereas an internal model cannot be directly manipulated to test its influence on action, the on-line control hypothesis has the advantage that visual information can be manipulated and control laws can be tested experimentally. In numerous cases, informational variables have been mathematically characterized and control laws formally specified. A number of studies have reported evidence supporting the view that particular variables or control laws are used to guide action in a range of tasks. More work is required, however, to experimentally test these hypotheses and firmly establish proposed control laws, including their level of generality.
Moreover, it must be emphasized that strong on-line control is not a comprehensive account of the control of action, for it does not attempt to explain behavior under conditions when visual information is unavailable. For a complete theory, an account of off-line control is also needed.
5.3.The hybrid hypothesis
The hybrid hypothesis aims to be a comprehensive account of the control of action by combining strong on-line control with complementary off-line control strategies. This hypothesis accepts that action is normally controlled online by current information. But under exceptional conditions, such as visual occlusion, near visual threshold, or repeated object motion, action may be controlled by simple off-line strategies such as heuristics, mappings, or spatial memory. For example, in visually directed locomotion, an approximate spatial memory of the target location appears to guide blind walking after vision is removed.
These weak off-line strategies do not guarantee successful or general control of action. Spatial memory is approximate, capacity-limited, and subject to interference and decay over time.
A heuristic is a qualitative rule of thumb without much predictive accuracy, but gets the actor into the ball-park for the task. A mapping strategy is based on a correlation between optical variables and action variables or goal-states that holds in a limited context. For example, a simple mapping from three drop heights to three drop durations may be learned during normal catching, and then used when the motion is occluded (Lacquaniti & Maioli, 1989a).
We find that existing evidence does not call for an accurate world model, and can often be explained by a simple heuristic or mapping. For example, participants walking to intercept a target that moved on a fixed circular path learned a short-cut strategy (Owens & Warren, 2010), but on-line control phased in on the far side of the circle. Moreover, the strategy was context-specific and did not generalize to multiple target paths with different radii and directions. This has the hallmarks of a heuristic. Baseball batters operating near the limits of visual performance appeared to learn a simple mapping from the ball's two initial motions to two arrival locations. Such results are more consistent with context-specific mappings than a general internal model of the projectile motion.
However, consider the possibility that off-line control is based on a full-blooded internal world model. Despite the vagueness of the hypothesis, we believe that an internal model can be distinguished from these weaker strategies. The original concept of an internal model entails computing and representing intervening states of the world with some degree of accuracy. It also implies that the model is generative, such that model-based control should generalize to new conditions within the model's domain. For instance, an internal model of projectile motion would represent intervening states of a ball's trajectory, and may be expected to generalize to new initial distances, launch speeds and angles, and ball elasticities, depending on its scope. Intervening positions on a target's trajectory can be probed by analyzing adaptive adjustments during occlusion (Zhao & Warren, 2014), or by unexpectedly revealing the target and analyzing mid-course corrections. Generalization can be tested by training participants on a subset of ball trajectories and transferring them to new trajectories. Such properties can thus be empirically evaluated, but testable predictions depend on specifying the scope and content of the internal model.
Conversely, heuristics and mappings must also be formally specified and experimentally tested. We have suggested a number of these alternative strategies above, some of which could be evaluated by reanalysis of existing data. Empirical tests of possible mappings require analyzing correlations between optical variables and goal-states that could guide action in a restricted task situation, and comparing their predictions with those of an internal model. The domain of generalization can be investigated by transfer to new situations in which the observed mapping no longer holds, providing a strong test of both hypotheses. Thus, experiments can be explicitly designed to disentangle the predictions of a general internal model from situation-specific heuristics and mappings.
6. Summary
In this paper, we considered the evidence regarding on-line and model-based control of action. We first introduced three hypotheses: strong on-line control, strong model-based control, and hybrid control. Second, we reviewed studies that manipulated the availability of visual information during locomotion and manual actions such as reaching and catching. The results show that performance in these tasks deteriorates rapidly with visual occlusion, and that actors adapt their movement patterns to maintain visual contact as long as possible. We conclude that an internal world model is insufficient to control behavior at normal levels of performance, and performance is strongly dependent on current information. Positing a short-lived, low-fidelity model that requires continual updating is a desperate measure that collapses into on-line control.
Third, we considered studies of the visual information that is used to guide locomotion and manual action, and the control laws by which information governs behavior. The evidence indicates that current information is normally sufficient to control action, without invoking an internal model. We conclude that action is ordinarily controlled on-line when current visual information is available.
Finally, we reviewed the literature on anticipatory control in interceptive actions. Results show that continuous control strategies are general and robust, and that strategies based on prospective information, in which current visual information specifies a future spatio-temporal goal state, can also be used for on-line control. In certain situations – under visual occlusion, near the limits of visual ability, or with limited trajectories – participants adopt a simple heuristic or mapping strategy, in which optical variables are mapped to an action variable or goal state. However, we find little evidence of model-based predictive control, in which an accurate internal model of an object trajectory is used to control interception. An internal world model is thus not necessary to account for off-line control.
We thus conclude that the strong model-based hypothesis is not sustainable. Action is ordinarily controlled on-line when current information is available, consistent with the strong on-line hypothesis. However a comprehensive account must also explain off-line control when sufficient visual information is unavailable. We believe that the hybrid hypothesis offers the most promising approach, combining on-line control under normal conditions with simple heuristic and mapping strategies in restricted circumstances. This hypothesis is comprehensive, parsimonious, and has the potential to account for a variety of tasks under a wide range of visual conditions. Further experiments are needed to distinguish the predictions of well-specified internal models from situation-specific heuristics and mappings, by probing intervening states and testing their domains of generalization.
Evidence is analysed for on-line and model-based control of action
A world model is neither sufficient nor necessary for normal levels of performance.
Current visual information is both necessary and sufficient for normal performance.
Under certain conditions, action is controlled by heuristic off-line strategies.
Thus, action is normally controlled on-line, with weak off-line back-up strategies.
Acknowledgments
This research was supported by NIH R01EY010923
Footnotes
A related strategy of strong anticipation has been developed for temporally coupled movements (Stepp & Turvey, 2010; Stephen, Stepp, Dixon, & Turvey, 2008), but unfortunately we do not have space to consider it here
Publisher's Disclaimer: This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final citable form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
References
- Arzamarski R, Harrison SJ, Hajnal A, Michaels CF. Lateral ball interception: Hand movements during linear ball trajectories. Experimental Brain Research. 2007;177:312–323. doi: 10.1007/s00221-006-0671-8. [DOI] [PubMed] [Google Scholar]
- Bastin J, Craig C, Montagne G. Prospective strategies underlie the control of interceptive actions. Human Movement Sciences. 2006;25:718–732. doi: 10.1016/j.humov.2006.04.001. [DOI] [PubMed] [Google Scholar]
- Baurès R, Benguigui N, Amorim MA, Siegler IA. Intercepting free falling objects: Better use Occam's razor than internalize Newton's law. Vision Research. 2007;47:2982–2991. doi: 10.1016/j.visres.2007.07.024. [DOI] [PubMed] [Google Scholar]
- Bennett SJ, Ashford D, Elliott D. Intermittent vision and one-handed catching: The temporal limits of binocular and monocular integration. Motor Control. 2003;7:378–387. [PubMed] [Google Scholar]
- Bennett SJ, Elliott D, Weeks DJ, Keil D. The effects of intermittent vision on prehension under binocular and monocular viewing. Motor Control. 2003;7:46–56. doi: 10.1123/mcj.7.1.46. [DOI] [PubMed] [Google Scholar]
- Binsted G, Rolheiser TM, Chua R. Decay in visuomotor representations during manual aiming. Journal of Motor Behavior. 2006;38:82–87. doi: 10.3200/JMBR.38.2.82-87. [DOI] [PubMed] [Google Scholar]
- Bootsma RJ, Fayt V, Zaal FTJM, Laurent M. On the information-based regulation of movement: Things Wann (1996) may want to consider. Journal of Experimental Psychology: Human Perception and Performance. 1997;23:1282–1289. [Google Scholar]
- Bootsma RJ, van Wieringen PCW. Timing an attacking forehand drive in table tennis. Journal of Experimental Psychology: Human Perception and Performance. 1990;16:21–29. [Google Scholar]
- Brenner E, Smeets JBJ. Fast responses of the human hand to changes in target position. Journal of Motor Behavior. 1997;29:297–310. doi: 10.1080/00222899709600017. [DOI] [PubMed] [Google Scholar]
- Brenner E, Smeets JBJ, de Lussanet MHE. Hitting moving targets, continuous control of the acceleration of the hand on the basis of the target's velocity. Experimental Brain Research. 1998;122:467–474. doi: 10.1007/s002210050535. [DOI] [PubMed] [Google Scholar]
- Brouwer AM, Brenner E, Smeets JBJ. Perception of acceleration with short presentation times: Can acceleration be used in interception? Perception & Psychophysics. 2002;64:1160–1168. doi: 10.3758/bf03194764. [DOI] [PubMed] [Google Scholar]
- Bruggeman H, Zosh W, Warren WH. Optic flow drives human visuo-locomotor adaptation. Current Biology. 2007;17:2035–2040. doi: 10.1016/j.cub.2007.10.059. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Butler JS, Smith ST, Campos JL, Bülthoff HH. Bayesian integration of visual and vestibular signals for heading. Journal of Vision. 2010;10:1–13. doi: 10.1167/10.11.23. [DOI] [PubMed] [Google Scholar]
- Caljouw SR, van der Kamp J, Savelsbergh GJP. The impact of task-constraints on the planning and control of interceptive hitting movements. Neuroscience Letters. 2006;392:84–89. doi: 10.1016/j.neulet.2005.08.067. [DOI] [PubMed] [Google Scholar]
- Chapman S. Catching a baseball. American Journal of Physics. 1968;36:868–870. [Google Scholar]
- Chardenon A, Montagne G, Laurent M, Bootsma RJ. A robust solution for dealing with environmental changes in intercepting moving balls. Journal of Motor Behavior. 2005;37:52–64. doi: 10.3200/JMBR.37.1.52-62. [DOI] [PubMed] [Google Scholar]
- Chemero A. Radical embodied cognitive science. Cambridge, MA: MIT Press; 2009. [Google Scholar]
- Clark A, Grush R. Towards a cognitive Robotics. Adaptive Behavior. 1999;7:5–16. [Google Scholar]
- Cloete SR, Wallis G. Limitations of feedforward control in multiple-phase steering movements. Experimental Brain Research. 2009;195:481–487. doi: 10.1007/s00221-009-1813-6. [DOI] [PubMed] [Google Scholar]
- Conant RC, Ashby WR. Every good regulator of a system must be a model of that system. International Journal of Systems Science. 1970;1:89–97. [Google Scholar]
- Craig CM, Goulon C, Berton E, Rao G, Fernandez L, Bootsma RJ. Optic variables used to judge future ball arrival position in expert and novice soccer players. Attention, Perception & Psychophysics. 2009;71:515–522. doi: 10.3758/APP.71.3.515. [DOI] [PubMed] [Google Scholar]
- Craik KJW. The nature of explanation. Cambridge, England: Cambridge University Press; 1943/1967. [Google Scholar]
- Davidson PR, Wolpert DM. Widespread access to predictive models in the motor system: A short review. Journal of Neural Engineering. 2005;2:S313–S319. doi: 10.1088/1741-2560/2/3/S11. [DOI] [PubMed] [Google Scholar]
- Dessing JC, Bullock D, Peper CE, Beek PJ. Prospective control of manual interceptive actions: Comparative simulations of extant and new model constructs. Neural Networks. 2002;15:163–179. doi: 10.1016/s0893-6080(01)00136-8. [DOI] [PubMed] [Google Scholar]
- Dessing JC, Peper CE, Bullock D, Beek PJ. How position, velocity and temporal information combine in the prospective control of catching: Data and model. Journal of Cognitive Neurosciences. 2005;17:668–686. doi: 10.1162/0898929053467604. [DOI] [PubMed] [Google Scholar]
- Dessing JC, Oostwoud-Wijdenes L, Peper CE, Beek PJ. Adaptations of lateral hand movements to early and late visual occlusion in catching. Experimental Brain Research. 2009;192:669–682. doi: 10.1007/s00221-008-1588-1. [DOI] [PubMed] [Google Scholar]
- Diaz G, Cooper J, Hayhoe M. Memory and prediction in natural gaze control. Philosophical Transactions of the Royal Society B. 2013;368(20130064):1–9. doi: 10.1098/rstb.2013.0064. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Diaz G, Cooper J, Rothkopf C, Hayhoe M. Saccades to future ball location reveal memory-based prediction in a virtual-reality interception task. Journal of Vision. 2013;13:1–14. doi: 10.1167/13.1.20. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Diaz G, Phillips F, Fajen BR. Intercepting moving targets: A little foresight helps a lot. Experimental Brain Research. 2009;195:345–360. doi: 10.1007/s00221-009-1794-5. [DOI] [PubMed] [Google Scholar]
- Diedrichsen J, Nambisan R, Kennerley SW, Ivry RB. Independent on-line control of the two hands during bimanual reaching. European Journal of Neuroscience. 2004;19:1643–1652. doi: 10.1111/j.1460-9568.2004.03242.x. [DOI] [PubMed] [Google Scholar]
- Duchon AP, Warren WH. Path planning vs. on-line control in visually guided locomotion. Investigative Ophthalmology and Visual Science. 1997;38:S79. [Google Scholar]
- Elliott D, Calvert R. The influence of uncertainty and premovement visual information on manual aiming. Canadian Journal of Psychology. 1990;44:501–511. doi: 10.1037/h0084263. [DOI] [PubMed] [Google Scholar]
- Elliott D, Chua R, Pollock BJ. The influence of intermittent vision on manual aiming. Acta Psychologica. 1994;85:1–13. doi: 10.1016/0001-6918(94)90016-7. [DOI] [PubMed] [Google Scholar]
- Elliott D, Pollock BJ, Lyons J, Chua R. Intermittent vision and discrete manual aiming. Perceptual and Motor Skills. 1995;80:1203–1213. doi: 10.2466/pms.1995.80.3c.1203. [DOI] [PubMed] [Google Scholar]
- Fajen BR. Guiding locomotion in complex, dynamic environments. Frontiers in Behavioral Neuroscience. 2013;7:85. doi: 10.3389/fnbeh.2013.00085. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Fajen BR, Warren WH. Behavioral dynamics of steering, obstacle avoidance, and route selection. Journal of Experimental Psychology: Human Perception and Performance. 2003;29:343–363. doi: 10.1037/0096-1523.29.2.343. [DOI] [PubMed] [Google Scholar]
- Fajen BR, Warren WH. Visual guidance of intercepting a moving target on foot. Perception. 2004;33:689–715. doi: 10.1068/p5236. [DOI] [PubMed] [Google Scholar]
- Fajen BR, Warren WH. Behavioral dynamics of intercepting a moving target. Experimental Brain Research. 2007;180:303–319. doi: 10.1007/s00221-007-0859-6. [DOI] [PubMed] [Google Scholar]
- Farrell MJ, Thomson JA. On-line updating of spatial information during locomotion without vision. Journal of Motor Behavior. 1999;31:39–53. doi: 10.1080/00222899909601890. [DOI] [PubMed] [Google Scholar]
- Fink PW, Foo PS, Warren WH. Catching fly balls in virtual reality: A critical test of the outfielder problem. Journal of Vision. 2009;9:1–8. doi: 10.1167/9.13.14. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Garcia CE, Morari M. Internal model control. A unifying review and some new results. Industrial and Engineering Chemistry Process Design and Development. 1982;21:308–323. [Google Scholar]
- Gibson JJ. Visually controlled locomotion and visual orientation in animals. British Journal of Psychology. 1958;49:182–194. doi: 10.1111/j.2044-8295.1958.tb00656.x. [DOI] [PubMed] [Google Scholar]
- Gibson JJ. The ecological approach to visual perception. Boston, MA: Houghton Mifflin Company; 1979. [Google Scholar]
- Godthelp J. Precognitive control: Open- and closed-loop steering in a lane-change maneuver. Ergonomics. 1985;28:1419–1438. doi: 10.1080/00140138508963268. [DOI] [PubMed] [Google Scholar]
- Godthelp H. Vehicle control during curve driving. Human Factors. 1986;28:211–221. doi: 10.1177/001872088602800209. [DOI] [PubMed] [Google Scholar]
- Gómez J, López-Moliner J. Synergies between optical and physical variables in intercepting parabolic targets. Frontiers in Behavioral Neuroscience. 2013;7:46. doi: 10.3389/fnbeh.2013.00046. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Gosselin-Kessiby N, Messier J, Kalaska JF. Evidence for automatic on-line adjustments of hand orientation during natural reaching movements to stationary targets. Journal of Neurophysiology. 2008;99:1653–1671. doi: 10.1152/jn.00980.2007. [DOI] [PubMed] [Google Scholar]
- Gray R. Behavior of college baseball players in a virtual batting task. Journal of Experimental Psychology: Human Perception and Performance. 2002;28:1131–1148. doi: 10.1037//0096-1523.28.5.1131. [DOI] [PubMed] [Google Scholar]
- Harris JM, Bonas W. Optic flow and scene structure do not always contribute to the control of human walking. Vision Research. 2002;42:1619–1626. doi: 10.1016/s0042-6989(02)00066-4. [DOI] [PubMed] [Google Scholar]
- Harris MG, Carré G. Is optic flow used to guide walking while wearing a displacing prism? Perception. 2001;30:811–818. doi: 10.1068/p3160. [DOI] [PubMed] [Google Scholar]
- Haselager P, de Groot A, van Rappard H. Representationalism vs. anti-representationalism: A debate for the sake of appearance. Philosophical Psychology. 2003;16:5–23. [Google Scholar]
- Hayhoe M, McKinney T, Chajka K, Pelz JB. Predictive eye movements in natural vision. Experimental Brain Research. 2012;217:125–136. doi: 10.1007/s00221-011-2979-2. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Hayhoe M, Mennie N, Sullivan B, Gorgos K. The role of internal models and prediction in catching balls. In: Castelfranchi C, Balkenius C, Butz M, Ortony A, editors. Technical Report FS-05-05; Proceedings of AAAI Symposium conducted at the meeting of AAAI; Menlo Park, CA, USA. 2005. Fall. [Google Scholar]
- Heath M, Westwood DA, Binsted G. The control of memory-guided reaching movements in peripersonal space. Motor Control. 2004;8:76–106. doi: 10.1123/mcj.8.1.76. [DOI] [PubMed] [Google Scholar]
- Hecht H. Regularities of the physical world and the absence of their internalization. Behavioral and Brain Sciences. 2001;24:608–617. doi: 10.1017/s0140525x01000036. [DOI] [PubMed] [Google Scholar]
- Hecht H, Savelsbergh GJP, editors. Time to contact. Amsterdam, The Netherlands: Elsevier; 2004. [Google Scholar]
- Hildreth EC, Beusmans JMH, Boer ER, Royden CS. From vision to action: Experiments and models of steering control during driving. Journal of Experimental Psychology: Human Perception and Performance. 2000;26:1106–1132. doi: 10.1037//0096-1523.26.3.1106. [DOI] [PubMed] [Google Scholar]
- Jacobs DM, Michaels CF. Lateral interception I: Operative optical variables, attunement, and calibration. Journal of Experimental Psychology: Human Perception and Performance. 2006;32:443–458. doi: 10.1037/0096-1523.32.2.443. [DOI] [PubMed] [Google Scholar]
- Katsumata H, Russell DM. Prospective versus predictive control in timing of hitting a falling ball. Experimental Brain Research. 2012;216:499–514. doi: 10.1007/s00221-011-2954-y. [DOI] [PubMed] [Google Scholar]
- Kawato M. Internal models for motor control and trajectory planning. Current Opinion in Neurobiology. 1999;9:718–727. doi: 10.1016/s0959-4388(99)00028-8. [DOI] [PubMed] [Google Scholar]
- Lacquaniti F, Maioli C. Adaptation to suppression of visual information during catching. The Journal of Neuroscience. 1989a;9:149–159. doi: 10.1523/JNEUROSCI.09-01-00149.1989. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Lacquaniti F, Maioli C. The role of preparation in tuning anticipatory and reflex responses during catching. The Journal of neuroscience. 1989b;9:134–148. doi: 10.1523/JNEUROSCI.09-01-00134.1989. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Land MF, McLeod P. From eye movements to actions: How batsmen hit the ball. Nature Neuroscience. 2000;3:1340–1345. doi: 10.1038/81887. [DOI] [PubMed] [Google Scholar]
- Lee DN. A theory of visual control of braking based on information about time-to-collision. Perception. 1976;5:437–459. doi: 10.1068/p050437. [DOI] [PubMed] [Google Scholar]
- Lee DN. Guiding movement by coupling taus. Ecological Psychology. 1998;10:221–250. [Google Scholar]
- Lee DN, Young DS. Visual timing of interceptive action. In: Ingle DJ, Jeannerod M, Lee DN, editors. Brain mechanisms and spatial vision. Dordrecht, The Netherlands: Nartinus Nijhoff; 1985. pp. 1–30. [Google Scholar]
- Lee DN, Young DS, Reddish PE, Lough S, Clayton TMH. Visual timing in hitting an accelerating ball. Quarterly Journal of Experimental Psychology A. 1983;35:333–346. doi: 10.1080/14640748308402138. [DOI] [PubMed] [Google Scholar]
- Lenoir M, Musch E, Janssens M, Thiery E, Uyttenhove J. Intercepting moving objects during self-motion. Journal of Motor Behavior. 1999;31:55–67. doi: 10.1080/00222899909601891. [DOI] [PubMed] [Google Scholar]
- Lenoir M, Musch E, Thiery E, Savelsbergh GJ. Rate of change of angular bearing as the relevant property in a horizontal interception task during locomotion. Journal of Motor Behavior. 2002;34:385–404. doi: 10.1080/00222890209601955. [DOI] [PubMed] [Google Scholar]
- Li L, Cheng JCK. Visual strategies for the control of steering toward a goal. Displays. 2013;34:97–104. [Google Scholar]
- Loomis JM, Beall AC. Visually controlled locomotion: Its dependence on optic flow, three-dimensional space perception, and cognition. Ecological Psychology. 1998;10:271–285. [Google Scholar]
- Loomis JM, Beall AC. Model-based control of perception/action. In: Vaina LM, Beardsley SA, Rushton SK, editors. Optic flow and beyond. Dordrecht, The Netherlands: Kluwer; 2004. pp. 421–441. [Google Scholar]
- Loomis JM, DaSilva JA, Fujita N, Fukusima SS. Visual space perception and visually directed action. Journal of Experimental Psychology: Human Perception and Performance. 1992;18:906–921. doi: 10.1037//0096-1523.18.4.906. [DOI] [PubMed] [Google Scholar]
- Loomis JM, Philbeck JW. Measuring spatial perception with spatial updating and action. In: Klatzky RL, MacWhinney B, Behrmann M, editors. Embodiment, ego-space, and action. New York, NY: Taylor & Francis; 2008. pp. 1–43. [Google Scholar]
- López-Moliner J, Brenner E, Louw S, Smeets JBJ. Catching a gently thrown ball. Experimental Brain Research. 2010;206:409–417. doi: 10.1007/s00221-010-2421-1. [DOI] [PubMed] [Google Scholar]
- López-Moliner J, Keil MS. People favour imperfect catching by assuming a stable world. PLoS One. 2012;7(4):e35705. doi: 10.1371/journal.pone.0035705. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Lyons J, Fontaine R, Elliott D. I lost it in the lights: The effects of predictable and variable intermittent vision on unimanual catching. Journal of Motor Behavior. 1997;29:113–118. doi: 10.1080/00222899709600826. [DOI] [PubMed] [Google Scholar]
- Mazyn LIN, Savelsbergh GJP, Montagne G, Lenoir M. Planning and on-line control of catching as a function of perceptual-motor constrains. Acta Psychologica. 2007;126:59–78. doi: 10.1016/j.actpsy.2006.10.001. [DOI] [PubMed] [Google Scholar]
- McBeath MK, Shaffer DM, Kaiser MK. How baseball outfielders determine where to run to catch fly balls. Science. 1995;268:569–573. doi: 10.1126/science.7725104. [DOI] [PubMed] [Google Scholar]
- McIntyre J, Zago M, Berthoz A, Lacquaniti F. Does the brain model Newton's laws? Nature Neuroscience. 2001;4:693–694. doi: 10.1038/89477. [DOI] [PubMed] [Google Scholar]
- McLeod P, Reed N, Dienes Z. The generalized optic acceleration cancellation theory of catching. Journal of Experimental Psychology: Human Perception and Performance. 2006;32:139–148. doi: 10.1037/0096-1523.32.1.139. [DOI] [PubMed] [Google Scholar]
- McLeod P, Reed N, Gilson S, Glennerster A. How soccer players head the ball: A test of optic acceleration cancellation theory with virtual reality. Vision Research. 2008;48:1479–1487. doi: 10.1016/j.visres.2008.03.016. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Michaels CF, Arzamarski R, Isenhower RW, Jacobs DM. Direct learning in dynamic touch. Journal of Experimental Psychology: Human Perception and Performance. 2008;34:944–957. doi: 10.1037/0096-1523.34.4.944. [DOI] [PubMed] [Google Scholar]
- Michaels CF, Jacobs DM, Bongers RM. Lateral interception II: Predicting hand movements. Journal of Experimental Psychology: Human Perception and Performance. 2006;32:459–472. doi: 10.1037/0096-1523.32.2.459. [DOI] [PubMed] [Google Scholar]
- Michaels CF, Oudejans RRD. The optics and actions of catching fly balls: Zeroing out optical acceleration. Ecological Psychology. 1992;4:199–222. [Google Scholar]
- Montagne G, Laurent M, Durey A, Bootsma RJ. Movement reversals in ball catching. Experimental Brain Research. 1999;129:87–92. doi: 10.1007/s002210050939. [DOI] [PubMed] [Google Scholar]
- Moravec H. The Stanford cart and the CMU rover. Proceedings of the IEEE. 1982;71:872–884. [Google Scholar]
- Morice AHP, Francois M, Jacobs DM, Montagne G. Environmental constraints modify the way an interceptive action is controlled. Experimental Brain Research. 2010;202:397–411. doi: 10.1007/s00221-009-2147-0. [DOI] [PubMed] [Google Scholar]
- Nijhawan R. Visual prediction: Psychophysics and neurophysiology of compensation for time delays. Behavioral and Brain Sciences. 2008;31:179–198. doi: 10.1017/S0140525X08003804. [DOI] [PubMed] [Google Scholar]
- Owens JM, Warren WH. Unpublished manuscript. Department of Cognitive, Linguistic, and Psychological Sciences, Brown University; Providence, RI, USA: 2010. Anticipation of moving targets in locomotion. [Google Scholar]
- Peper CE, Bootsma RJ, Mestre DR, Bakker FC. Catching balls: How to get the hand to the right place at the right time. Journal of Experimental Psychology: Human Perception and Performance. 1994;20:591–612. doi: 10.1037//0096-1523.20.3.591. [DOI] [PubMed] [Google Scholar]
- Pepping GJ, Grealy MA, editors. Closing the gap: The scientific writings of David N Lee. Mahwah, NJ: Lawrence Erlbaum Associates; 2007. [Google Scholar]
- Philbeck JW. Visually directed walking to briefly glimpsed targets is not biased toward fixation location. Perception. 2000;29:259–272. doi: 10.1068/p3036. [DOI] [PubMed] [Google Scholar]
- Philbeck JW, Loomis JM, Beall AC. Visually perceived location is an invariant in the control of action. Perception & Psychophysics. 1997;59:601–612. doi: 10.3758/bf03211868. [DOI] [PubMed] [Google Scholar]
- Rieser JJ, Ashmead DH, Talor CR, Youngquist GA. Visual perception and the guidance of locomotion without vision to previously seen targets. Perception. 1990;19:675–689. doi: 10.1068/p190675. [DOI] [PubMed] [Google Scholar]
- Rushton SK, Harris JM, Lloyd MR, Wann JP. Guidance of locomotion on foot uses perceived target location rather than optic flow. Current Biology. 1998;8:1191–1194. doi: 10.1016/s0960-9822(07)00492-7. [DOI] [PubMed] [Google Scholar]
- Sarlegna F, Blouin J, Bresciani JP, Bourdin C, Vercher JL, Gauthier GM. Target and hand position information in the online control of goal-directed arm movements. Experimental Brain Research. 2003;151:524–535. doi: 10.1007/s00221-003-1504-7. [DOI] [PubMed] [Google Scholar]
- Saunders JA, Knill DC. Visual feedback control of hand movements. The Journal of Neuroscience. 2004;24:3223–3234. doi: 10.1523/JNEUROSCI.4319-03.2004. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Saunders JA, Knill DC. Humans use continuous visual feedback from the hand to control both the direction and distance of pointing movements. Experimental Brain Research. 2005;162:458–473. doi: 10.1007/s00221-004-2064-1. [DOI] [PubMed] [Google Scholar]
- Saxberg BV. Projected free fall trajectories. 1. Theory and simulation. Biological Cybernetics. 1987;56:159–175. doi: 10.1007/BF00317991. [DOI] [PubMed] [Google Scholar]
- Schöner G. Dynamic theory of action-perception patterns: The ‘moving room’ paradigm. Biological Cybernetics. 1991;64:455–462. doi: 10.1007/BF00202609. [DOI] [PubMed] [Google Scholar]
- Shaffer DM, McBeath MK. Naive beliefs in baseball: Systematic distortion in perceived time of apex for fly balls. Journal of Experimental Psychology: Learning, Memory and Cognition. 2005;31:1492–1501. doi: 10.1037/0278-7393.31.6.1492. [DOI] [PubMed] [Google Scholar]
- Senot P, Zago M, Lacquaniti F, McIntyre J. Anticipating the effects of gravity when intercepting moving objects: Differentiating up and down based on nonvisual cues. Journal of Neurophysiology. 2005;94:4471–4480. doi: 10.1152/jn.00527.2005. [DOI] [PubMed] [Google Scholar]
- Sharp RH, Whiting HT. Exposure and occluded duration effects in a ball-catching skill. Journal of Motor Behavior. 1974;6:139–147. doi: 10.1080/00222895.1974.10734990. [DOI] [PubMed] [Google Scholar]
- Siegler IA, Bardy BG, Warren WH. Passive vs. active control of rhythmic ball bouncing: The role of visual information. Journal of Experimental Psychology: Human Perception and Performance. 2010;36:729–750. doi: 10.1037/a0016462. [DOI] [PubMed] [Google Scholar]
- Smith MRH, Flach JM, Dittman SM, Stanard T. Monocular optical constraints on collision control. Journal of Experimental Psychology: Human Perception and Performance. 2001;27:395–410. doi: 10.1037//0096-1523.27.2.395. [DOI] [PubMed] [Google Scholar]
- Stephen DG, Stepp N, Dixon JA, Turvey MT. Strong anticipation: Sensitivity to long-range correlations in synchronization behavior. Physica A. 2008;387:5271–5278. [Google Scholar]
- Stepp N, Turvey MT. On strong anticipation. Cognitive Systems Research. 2010;11:148–164. doi: 10.1016/j.cogsys.2009.03.003. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Thomson JA. Is continuous visual monitoring necessary in visually guided locomotion? Journal of Experimental Psychology: Human Perception and Perception. 1983;9:427–443. doi: 10.1037//0096-1523.9.3.427. [DOI] [PubMed] [Google Scholar]
- Thrun S. To know or not to know: On the utility of models in mobile robotics. AI Magazine. 1997;18:47–54. [Google Scholar]
- Tijtgat P, Bennett SJ, Savelsbergh GJP, De Clercq D, Lenoir M. To know or not to know: Influence of explicit advance knowledge of occlusion on interceptive actions. Experimental Brain Research. 2011;214:483–490. doi: 10.1007/s00221-011-2846-1. [DOI] [PubMed] [Google Scholar]
- Tresilian JR. Visually timed action: Time-out for ‘tau’? Trends in Cognitive Sciences. 1999;3:301–310. doi: 10.1016/s1364-6613(99)01352-2. [DOI] [PubMed] [Google Scholar]
- Turano KA, Yu D, Hao L, Hicks JC. Optic-flow and egocentric-direction strategies in walking: Central vs. peripheral visual field. Vision Research. 2005;45:3117–3132. doi: 10.1016/j.visres.2005.06.017. [DOI] [PubMed] [Google Scholar]
- Wallis G, Chatziastros A, Tresilian J, Tomasevic N. The role of visual and non-visual feedback in a vehicle steering task. Journal of Experimental Psychology: Human Perception and Performance. 2007;33:1127–1144. doi: 10.1037/0096-1523.33.5.1127. [DOI] [PubMed] [Google Scholar]
- Wallis G, Chatziastros A, Bülthoff H. An unexpected role for visual feedback in vehicle steering control. Current Biology. 2002;12:295–299. doi: 10.1016/s0960-9822(02)00685-1. [DOI] [PubMed] [Google Scholar]
- Wann JP. Anticipating arrival: Is the tau margin a specious theory? Journal of Experimental Psychology: Human Perception and Performance. 1996;22:1031–1048. doi: 10.1037//0096-1523.22.4.1031. [DOI] [PubMed] [Google Scholar]
- Warren WH. Visually controlled locomotion: 40 years later. Ecological Psychology. 1998;10:177–219. [Google Scholar]
- Warren WH. How do animals get about by vision? Visually controlled locomotion and orientation after 50 years. British Journal of Psychology. 2009;100:277–281. doi: 10.1348/000712609X414150. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Warren WH. The dynamics of perception and action. Psychological Review. 2006;113:358–389. doi: 10.1037/0033-295X.113.2.358. [DOI] [PubMed] [Google Scholar]
- Warren WH, Fajen BR. Behavioral dynamics of visually-guided locomotion. In: Fuchs A, Jirsa VK, editors. Coordination: Neural, behavioral, and social dynamics. Heidelberg, Germany: Springer; 2008. pp. 45–75. [Google Scholar]
- Warren WH, Kay BA, Zosh WD, Duchon AP, Sahuc S. Optic flow is used to control human walking. Nature Neuroscience. 2001;4:213–216. doi: 10.1038/84054. [DOI] [PubMed] [Google Scholar]
- Werkhoven P, Snippe HP, Toet A. Visual processing of optic acceleration. Vision Research. 1992;32:2313–2329. doi: 10.1016/0042-6989(92)90095-z. [DOI] [PubMed] [Google Scholar]
- Westwood DA, Heath M, Roy EA. The accuracy of reaching movements in brief delay conditions. Canadian Journal of Experimental Psychology. 2001;55:304–310. doi: 10.1037/h0087377. [DOI] [PubMed] [Google Scholar]
- Whiting HT, Sharp RH. Visual occlusion factors in a discrete ball-catching task. Journal of Motor Behavior. 1974;6:11–16. doi: 10.1080/00222895.1974.10734974. [DOI] [PubMed] [Google Scholar]
- Wilkie RM, Wann JP. Controlling steering and judging heading: Retinal flow, visual direction, and extraretinal information. Journal of Experimental Psychology: Human Perception and Performance. 2003;29:363–378. doi: 10.1037/0096-1523.29.2.363. [DOI] [PubMed] [Google Scholar]
- Wilkie RM, Wann JP. The role of visual and nonvisual information in the control of locomotion. Journal of Experimental Psychology: Human Perception and Performance. 2005;31:901–911. doi: 10.1037/0096-1523.31.5.901. [DOI] [PubMed] [Google Scholar]
- Wolpert DM, Ghahramani Z. Computational principles of movement neuroscience. Nature Neuroscience. 2000;3:1212–1217. doi: 10.1038/81497. [DOI] [PubMed] [Google Scholar]
- Zago M, Bosco G, Maffei V, Iosa M, Ivanenko YP, Lacquaniti F. Internal models of target motion: Expected dynamics overrides measured kinematics in timing manual interceptions. Journal of Neurophysiology. 2004;91:1620–1634. doi: 10.1152/jn.00862.2003. [DOI] [PubMed] [Google Scholar]
- Zago M, McIntyre J, Senot P, Lacquaniti F. Internal models and prediction of visual gravitational motion. Vision Research. 2008;48:1532–1538. doi: 10.1016/j.visres.2008.04.005. [DOI] [PubMed] [Google Scholar]
- Zago M, McIntyre J, Senot P, Lacquaniti F. Visuo-motor coordination and internal models for object interception. Experimental Brain Research. 2009;192:571–604. doi: 10.1007/s00221-008-1691-3. [DOI] [PubMed] [Google Scholar]
- Zhao H, Warren WH. Unpublished manuscript. Department of Cognitive, Linguistic, and Psychological Sciences, Brown University; Providence, RI, USA: 2013. On-line and off-line control of locomotion: Steering a slalom course. [Google Scholar]
- Zhao H, Warren WH. Unpublished manuscript. Department of Cognitive, Linguistic, and Psychological Sciences, Brown University; Providence, RI, USA: 2014. Locomotor interception of a moving target: On-line or model-based control? [Google Scholar]