

Abstract
We examined whether the direction of balance rather than an otolith reference determines the perceived upright. Participants seated in a device that rotated around the roll axis used a joystick to control its motion. The direction of balance of the device, the location where it would not be accelerated to either side, could be offset from the gravitational vertical, a technique introduced by Riccio, Martin, and Stoffregen (J Exp Psychol Hum Percept Perform 18: 624–644, 1992). Participants used the joystick to align themselves in different trials with the gravitational vertical, the direction of balance, the upright, or the direction that minimized oscillations. They pressed the joystick trigger whenever they thought they were at the instructed orientation. Achieved angles for the “align with gravity” and “align with the upright” conditions were not different from each other and were significantly displaced past the gravitational vertical opposite from the direction of balance. Mean indicated angles for align with gravity and align with the upright coincided with the gravitational vertical. Both mean achieved and indicated angles for the “minimize oscillations” and “align with the direction of balance” conditions were significantly deviated toward the gravitational vertical. Three control experiments requiring self-settings to instructed orientations only, perceptual judgments only, and perceptual judgments during passive exposure to dynamic roll profiles confirmed that perception of the upright is determined by gravity, not by the direction of balance.
Keywords: gravity, balance, orientation, otoliths, vehicle control, inverted pendulum
significant inertial accelerations are associated with self-motion, including head on torso movements (Imai et al. 2001), rectilinear and curvilinear locomotion (Dai et al. 1989), and even postural sway when standing (Fitzpatrick et al. 1994). The ability to perform such activities is often taken as evidence that a central nervous system (CNS) mechanism has evolved for decomposing a gravitational reference direction from the net gravitoinertial acceleration vector at any moment. Identifying the computational and neural basis of this decomposition remains a persisting research challenge (Angelaki and Cullen 2008; Glasauer 1992; Merfeld et al. 1999; Mittelstaedt and Mittelstaedt 1996). Various dynamic models have been proposed, including spectral decomposition of otolithic linear acceleration (Angelaki et al. 1999; Kaptein and Van Gisbergen 2006; Zupan et al. 2000), commensuration of angular velocity signals from the semicircular canals with a portion of the otolithic linear acceleration signal (Green and Angelaki 2010; Hain 1986; Laurens and Angelaki 2011), and feedforward cancellation of active translation (Carriot et al. 2013). A recent model proposes that the outputs of the otolith organs and of somatic touch and pressure sensors are interpreted in relation to the 1-g background acceleration of Earth gravity (Bortolami et al. 2006). The rationale is that the vestibular system evolved in a context where departures from 1 g were primarily associated with voluntary self-motion, whereas acceleration during passive transport in vehicles is a recent phenomenon. Thus there was no pressure for the CNS to evolve a mechanism for distinguishing between inertial and gravitational accelerations when the organism is not actively moving. This model makes unique predictions about orientation errors in hypergravity conditions that have been confirmed (Bryan et al. 2007; Lackner and DiZio 2009).
These models all produce an estimate of the “upright” direction by extracting the gravitational acceleration vector from the gravitoinertial resultant. This underlying assumption that an otolithic reference signal is important for perceiving the upright was challenged by Stoffregen and Riccio (1988). Modeling body sway about the ankles as an inverted pendulum, they proposed that the upright could be achieved and perceived through the minimization of ankle torque, which occurs at the direction of balance (DOB) where the body is not subjected to a gravitational torque. The gravitational vertical and the DOB are the same under normal terrestrial conditions, so to test their hypothesis they developed an apparatus in which seated blindfolded participants could use a joystick to set themselves to the upright when the DOB of the apparatus was displaced with respect to the gravitational vertical (Riccio et al. 1992). Their assertions, “. . .in our view the direction of balance should be perceived as upright or vertical” and “if control is important for the perception of orientation, the effect of balance would be significantly smaller or absent for passive subjects,” if correct, are of especial significance for understanding human spatial orientation and vehicle control.
They programmed their “roll-axis tracking simulator” (RATS) to approximate the dynamics of an inverted pendulum. The individual seated in the device used an isometric force joystick to control the RATS, which had a rotation axis in the seat pan. Its balance point (the DOB) could correspond with the gravitational vertical or be displaced up to ±15°. The blindfolded participants were told to set themselves to the upright, where the upright was intentionally not further defined. After each 30-s trial, they made a verbal estimate of their average direction and angle during the trial with regard to the upright. These reports were compared with the actual average RATS orientations for the different DOBs. The DOB was found to have an influence on the upright that was magnified when the DOB was farthest from the gravitational vertical.
We revisited this classic study because if the active maintenance of balance influences the perceived upright, then this has important implications for the perception of body orientation in dynamic conditions, including flight. Our approach was to test the dissociability of the DOB from the perceived gravitational vertical in an active self-balancing task under a broader set of conditions than the original study of Riccio et al. (1992). We programmed a multiaxis rotation system (MARS) to mimic inverted pendulum behavior in the roll plane and had participants use a spring-loaded joystick to control the apparatus and to give perceptual indications. Our goal was to quantify the relative influences of the DOB and the gravitational vertical on perceived and achieved orientations. For our initial experiment, we gave participants four types of instructions: 1) “align with gravity”; 2) “align with the upright”; 3) “align with the direction of balance”; and 4) “align so that you minimize oscillations.” Riccio et al. (1992) had used the sole instruction to “set yourself to the upright.” Two of the instructions gave explicit orientations to achieve (align with gravity and align with the DOB). One instruction (minimize oscillations) gave the participants a strategy for finding the DOB. The last instruction (align with upright) was the instruction used in the original experiment (Riccio et al. 1992). In addition to controlling the roll movement of the MARS through left and right joystick deflections, we asked participants to use their index finger to press a trigger on the joystick at moments when they felt that they were aligned with the instructed orientation to determine whether achieved and perceived orientations would directly correspond. We also recorded the motion of the MARS throughout the experiment so that this motion could later be played back passively in subsequent control experiments.
Gage et al. (2004) have shown that quiet stance can be modeled as an inverted pendulum. To determine whether balancing in the MARS employs capabilities common with maintaining stance under normal conditions, we measured the static postural stability of participants standing in the sharpened Romberg stance (heel to toe) before testing them in the MARS device.
Our experimental results indicated that control and perception of the DOB and gravitational vertical are dissociable, whereas Riccio et al. (1992) had concluded that the gravitational vertical was dependent on the DOB. We thought it possible that pressing the trigger to indicate the instructed orientation had served as a distractor in our experiment affecting the participant's ability to control the device. Therefore, in a control experiment (control 1), we ran additional participants using identical instructions and conditions but without requiring perceptual indications. The achieved MARS settings were the same as in the main experiment. We also wanted to determine whether subjects actively controlling the MARS differed in their perceptual performance from those passively exposed. To do this, we used passive playback of trials recorded during the main experiment with blindfolded participants simply using trigger presses to indicate when they were at the instructed orientations. Control 2A involved participants from the original experiment who were passively played back their own trials. Control 2B involved participants who had not been in the MARS before. There was no difference between the performances of the experienced and naïve participants, and the results corresponded to those obtained in our main experiment.
MAIN EXPERIMENT
Methods
Apparatus.
A custom-built Neuro Kinetics MARS was programmed to simulate the behavior of an inverted pendulum by rolling the seated participant around an axis in the midsagittal plane located 15 cm above the surface of the chair seat and coinciding approximately with the center of mass of a typical human seated with the thighs slightly elevated (Clauser 1963), as shown in Fig. 1A. The participant's head was firmly secured in a normal attitude by a foam restraint. The feet and knees were restrained with straps, and the torso, shoulders, and legs were secured with a lap belt, chest belt, lateral support plates, a five-point safety harness, and leg straps. Except where noted, all angles of the MARS device are reported relative to the gravitational vertical with positive angles indicating left ear down.
Fig. 1.

A: multiaxis rotation system (MARS) balancing task. The left illustrates a participant in the MARS device holding with his right hand a joystick that controls roll motion (leftward deflection positive, rightward deflection negative). The MARS axis of rotation is indicated by the ⊗ on the right. The MARS direction of balance (DOB) could be offset from the gravitational vertical, and a DOB offset of +30°, left ear down, is illustrated. The MARS accelerates away from the DOB with an angular acceleration proportional to the sine of the angle φ between the chair axis and the DOB. When the MARS axis is between the DOB and the gravitational vertical, the MARS will move toward and past the gravitational vertical. B: schematic overview of the control hardware/software of the MARS device. The direction of balance could be offset relative to gravity by an angle that varied each trial. Variables fixed for the experiment included: joystick sensitivity (kJ = 12°/s at full deflection), pendulum constant (kp), and kinematic limits (φl = ±60°, φ̇l = ±300°/s, φ̈l = ±180°/s2). Variables updated every cycle of the software control loop include: angular position, velocity, and acceleration relative to the DOB (φ, φ̇, and φ̈); commanded angular position, velocity, and acceleration (φ^, φ̇^, and φ̈^); and angular position relative to gravitational vertical (φg). NI, National Instruments.
The participant used a Logitech Freedom 2.4 Cordless Joystick mounted on the right armrest of the MARS to control its motion. Throughout this report, leftward joystick deflections are reported as positive. The maximum joystick displacement was ±30°, and a light spring returned it to the center position when released. We chose a displacement rather than an isometric joystick because its use was more intuitive for participants, i.e., if the body rolls too far to the left, then they would move the joystick to the right to counter the motion. The joystick signal was conveyed by a wireless connection (Hawking Technologies HMPS2U Wireless-N USB) to the computer running the control loop.
MARS control algorithm.
The DOB was the roll angle at which the MARS could in principle remain stationary with minimal control inputs by the participant. The DOB is, however, an unstable equilibrium point so that a slight deviation of the MARS to either side of the DOB would result in it falling away from the DOB. In our experiments, the DOB was offset up to ±30° from the gravitational vertical. Inverted pendulum dynamics were simulated by the control scheme shown in Fig. 1B. The symbol φ represents the angle between the long axis of the MARS and the DOB and can be considered a measure of how “off-balance” the MARS is at a given time. The nonlinear equation describing simple inverted pendulum motion (φ̈ = kpsinφ) was integrated numerically by an algorithm based on a fourth-order Runge-Kutta (RK4) solver (Lambert 1973). The integration step was set to the time elapsed since the previous integration (20.7 ± 1.1 ms). The calculated trajectory was translated into a continuous torque signal for the MARS servomotor by a National Instruments PCI-7340 motion controller that has a precision of 0.7°/s. For participant comfort and safety, angular velocity and angular acceleration were limited to 300°/s and 180°/s2, respectively. If the MARS rolled past ±90° from the DOB, the participant was presumed to have lost control and the MARS was automatically returned to the current DOB at a rate of 4°/s. The participant was notified by an automated auditory message when the MARS was being repositioned and when to resume the task.
The kp (Fig. 1B) used in the inverted pendulum dynamics simulation was determined empirically. Four individuals, all naïve to the MARS, attempted to balance it at the gravitational vertical as the kp value was modified. The largest kp value for which each person could maintain control of the MARS for 3 min was noted, and these four kp values were averaged to obtain the experimental kp of 350°/s2. This programmed value corresponds roughly to the 8 rad/s2 stiffness of the gravitational spring for active human quiet stance (Morasso and Schieppati 1999).
As shown in Fig. 1B, a velocity increment proportional to the lateral joystick displacement was added to the instantaneous angular velocity computed by the dynamics algorithm and the integration process. In a pilot study, we found no noticeable difference in perceived difficulty among position, velocity, and acceleration control, so we used a velocity control approach to conform to the original study by Riccio and colleagues (1992). The proportionality coefficient of the joystick signal (joystick gain), kJ, was set empirically during a pilot study. A joystick gain that was too low would have prevented the participant from recovering from high accelerations at a large angle φ, whereas a joystick gain that was too high would have led to operator-induced oscillations. A gain of kJ = 12°/s at full deflection of the joystick was chosen because it was the minimum value that would still allow recovery at the maximum rotation angle.
To determine the response latency of the system, we replaced the joystick input with four sinusoidal forcing functions of 0.1–6.4 Hz and amplitudes of 1–50°. Data were recorded for 50 s with the MARS axis either aligned with the gravitational vertical or tilted by 30°. For frequencies up to 1.6 Hz, the average delay was near constant up to 40° amplitude across DOBs at ∼30 ms. As shown in Fig. 5B below, the frequencies of joystick inputs stayed below 1.6 Hz throughout the experiment.
Fig. 5.
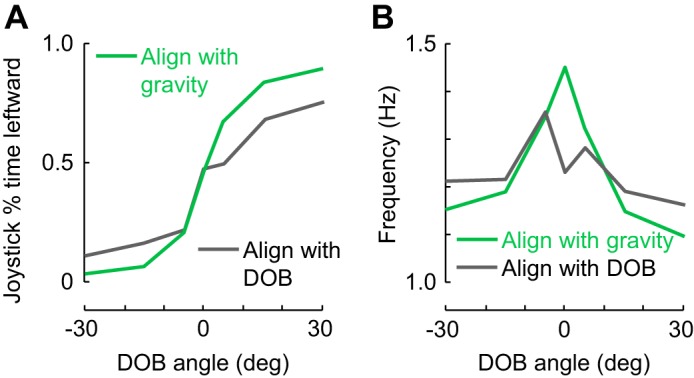
Joystick input. A: normalized percentage duration of leftward joystick deflections for the align with gravity and align with the direction of balance (DOB) instructions. Normalized percentage was calculated as %leftward/(%leftward+%rightward) for lateral joystick deflections >10% of the maximum. B: upper limit of the frequency band containing 90% of power in joystick deflections.
Participants.
Sixteen adults (6 women), 30.3 ± 9.5 yr of age, were recruited from students and staff members of Brandeis University. Three had previous experience in the MARS. All but two were right-handed, and none reported health or balance disorders. All gave informed, written consent to the procedures as approved by the university Institutional Review Board.
Procedure.
Before the first experimental session, each participant's static balance ability was tested using a Kistler force plate (model 9261A). The participant stood in a sharpened Romberg stance with eyes closed and hands crossed over the chest with palms resting on the shoulders for four 1-min trials. The center of pressure was recorded for both anterior-posterior and medial-lateral directions and was used to calculate the mean sway amplitude (MSA; Winter 1995). The first trial was for familiarization and was not analyzed.
The experimenter then explained the inverted pendulum dynamics of the MARS to the participant using an analogy with a pencil falling over after being balanced on its point. The DOB was defined as the orientation where the MARS would stay with minimal intervention, and it was explained that displacements to either side would result in falling to that side without joystick intervention. The direction of gravity was explained as the direction an object would fall if dropped. Care was taken to ensure that each participant understood the difference between the gravitational vertical and the DOB by asking the participant to predict the resulting direction of motion of the MARS if it were deviated in different directions in relation to the DOB. After the participants demonstrated that they understood the distinction, they were informed that the DOB would change during the experiment but not when or in which direction. Instruction concluded with a 3-min familiarization period in which the participant sat at a desk facing the back of the MARS device and used a desk-mounted joystick to balance the MARS at the gravitational vertical while watching its motion. During this period, the participant was also trained how to use the joystick trigger button to indicate when the MARS was at the desired orientation. After familiarization, the participant was secured in the MARS and blindfolded. The room lights were turned off during the experiment. Auditory localization cues were minimized by means of earplugs and a noise-canceling headset into which a masking sound or verbal instructions were played.
Eight blocks of trials were divided across 2 experimental sessions conducted at least 24 h apart, as shown in Fig. 2. Each block contained 15 trials. Seven DOBs were each presented twice in a random order: ±30, ±15, ±5, and 0° from the gravitational vertical. The 1st trial in each block always had the DOB at 0° and was not included in the data analysis. Each trial lasted a minimum of 45 s. If a participant lost control of the MARS during a trial, the trial timer was restarted after the MARS had been returned to the DOB. This process was repeated until the participant had completed 45 s of continuous control at that DOB. Between trials, the DOB was moved to its new position at a rate of 4°/s. The participant was not cued to the beginning or end of DOB transitions and had joystick control throughout.
Fig. 2.

Experimental design. Eight blocks of trials were conducted over 2 experimental sessions. After postural measurement and a familiarization session (Fam.), the participant was given 1 of 4 instructions to carry out, in counterbalanced order, during the 15 trials of each block.
One of four instructions was given before the beginning of each block: 1) “Keep the chair aligned with the direction of gravity” (hereafter referred to as the GRAVITY instruction); 2) “Keep the chair in the position that you feel is upright” (UPRIGHT); 3) “Keep the chair aligned with the direction of balance” (BALANCE); or 4) “Keep the chair in the position that minimizes oscillations” (OSCILLATION). The order of instructions was counterbalanced, with each being given for two blocks, so that each combination of instruction and DOB was tested four times. The participants were further instructed to press the joystick trigger each time that they felt themselves to be at the instructed orientation.
Data reduction.
Control performance was measured by continuously recording the angle between the MARS axis and the gravitational vertical. This value will be referred to as the “achieved angle.” The achieved angle, angular velocity of the MARS, and joystick deflection were all sampled at 48 Hz (20.7 ± 1.1-ms sampling interval). Perception of orientation was measured by recording the angle between the MARS axis and the gravitational vertical each time the participant pressed the joystick trigger button, hereafter referred to as the “indicated angle.” The term “joystick task” refers to the two uses of the joystick: lateral displacements to set the MARS to the instructed orientation and trigger presses to indicate perceived attainment of the instructed orientation. The raw data for a single trial from a typical participant are shown in Fig. 3A. At the start of a trial, the DOB was moved from its position in the previous trial to its new position. The end of a trial was defined as the moment when the participant had maintained control for 45 consecutive seconds without losing control. Data analysis focused on these 45-s periods.
Fig. 3.

Typical trial data. Data from a participant for the “align with the direction of balance” instruction and a DOB of −30°. A: unprocessed, raw data. The solid black lines represent achieved angle (top), angular velocity (middle), and joystick deflection (bottom). The thick dashed black line (long dashes) in the top graph represents the DOB, and the blue dots represent joystick trigger presses when the participant indicated he thought he was aligned with the DOB. Gray shaded regions of the timeline indicate when the DOB was being moved to a new position. Dark gray shaded regions indicate when the participant had lost control and the MARS was being repositioned. The participant is controlling the MARS in the unshaded and light gray shaded regions. The last 45 s of the unshaded region were used for analysis. Positive angles and velocities are left ear down (LED) for the MARS or leftward deflection (L) for the joystick, and negative angles and velocities are right ear down (RED) for the MARS or rightward deflection (R) for the joystick. deg, Degrees. B: power spectral densities of indicated angle, velocity, and joystick deflection.
Power spectral density plots of the raw data (Fig. 3B) were used to determine cutoff frequencies for filtering high-frequency noise from the data. Zero-phase, five-pole Butterworth filtering was applied to all trial data, with cutoff frequencies for roll angle (5 Hz), angular velocity (10 Hz), and joystick deflections (5 Hz). These filtered data were used in all subsequent analyses. The power spectra also showed that 90% of the power in the chair roll angle was below 0.74 Hz. Consequently, the system delay between joystick deflection and chair response remained constant at ∼30 ms according to our system tests described above.
For each participant, the four trial repetitions for each combination of DOB and instruction were aggregated, and the mean achieved and indicated angles were calculated across every sample of the combined data. In keeping with the analytic approach used by Riccio et al. (1992), these means were used in subsequent analyses. We also repeated the analyses using medians. This had a small influence on the absolute but not the relative biases of achieved and indicated angles and did not result in statistically significant differences with the analyses using means. To characterize each participant's performance, we computed regression slopes and intercepts for the straight line fits of mean achieved and indicated angles as functions of DOB.
Results
The plots in Fig. 4 present achieved and indicated angles as a function of DOB for each instruction, averaged across participants. Statistical analyses of the slopes and intercepts of angles vs. DOB were performed for individual participants. A 4 (instruction) × 2 (joystick task: achieved or indicated angle) repeated-measures multivariate ANOVA (MANOVA) was performed on the slopes and intercepts. Significant effects of both instruction (F6,90 = 6.231, P < 0.001, η2 = 0.293, power = 0.998) and joystick task (F2,14 = 19.124, P < 0.001, η2 = 0.732, power = 0.999) were found as well as an interaction between these two factors (F6,90 = 2.238, P = 0.039, η2 = 0.134, power = 0.779). These results show that participants responded differently to the various instructions and that they oriented the MARS to a different angle than what they indicated to be the instructed orientation. Subsequent univariate ANOVAs showed that regression intercepts were not affected (all P > 0.22), indicating that our manipulations did not introduce a bias toward one side. The univariate analyses of regression slopes showed significant effects of both joystick task (F2,14 = 19.124, P < 0.001, η2 = 0.732, power = 0.999) and instruction (F1.681,25.208 = 15.240, P < 0.001, η2 = 0.504, power = 0.995). All further analyses will focus on the regression slopes.
Fig. 4.
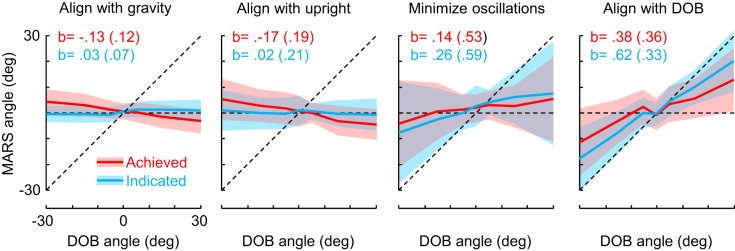
Summary data. Achieved (red) and indicated (blue) angles across instructions and DOBs, N = 16. Solid lines show average angles relative to the gravitational vertical across all participants, and shaded areas show standard deviations. Each plot shows the means and standard deviations for slopes, b, of the regressions for individual participants. A horizontal dashed line represents ideal performance for the “align with gravity” and “align with upright” instructions, whereas a diagonal dashed line represents ideal performance for the “minimize oscillations” and the “align with DOB” instructions. Positive DOB angles represent left ear down.
Achieved angle vs. indicated angle.
For all four instructions, there were significant differences between the regression slopes of achieved and indicated angles (P < 0.008 in each case) with the indicated angle being closer than the achieved angle to the instructed orientation. This implies that the participants were better able to perceive the instructed orientation than to set the MARS to that orientation.
Effect of instruction.
The regression slopes of both achieved and indicated angles were compared for each pair of instructions. Bonferroni corrections were performed on these and all subsequent paired t-tests. The regression slopes did not differ significantly between the GRAVITY and UPRIGHT instructions for either the achieved (P = 0.33) or the indicated (P = 0.23) angles, suggesting that the participants equated these instructions. However, regression slopes for both the GRAVITY and UPRIGHT instructions differed significantly from the BALANCE instruction (achieved angle P < 0.001 in both cases, indicated angle P < 0.001 in both cases). Finally, when participants tried to minimize oscillations (OSCILLATION), the regression slopes of achieved angles differed from the slopes for all other instructions (P < 0.04 in each case), but the regression slopes of indicated angles differed only from those in the BALANCE instruction (P = 0.006, all other instructions P > 0.05).
Effect of DOB on the perception and control of orientation.
If the DOB affects the control of orientation for a given instruction, then the slope of the regression of achieved angle on DOB will differ from 0. The positive slopes of the achieved and indicated angle regressions show that both shifted in the direction of the DOB when participants were instructed to align with the DOB. The slopes of achieved (mean = 0.38, SD = 0.36) and indicated angles (mean = 0.62, SD = 0.33) were significantly different (P < 0.001, paired t-tests). Paired t-tests revealed that the regression slopes for indicated angles were not significantly different from 0 for the GRAVITY (mean = 0.03, SD = 0.07, P = 0.10) and UPRIGHT (mean = −0.02, SD = 0.21, P = 0.67) instructions. However, the slopes for achieved angle were significantly negative for both GRAVITY (mean = −0.13, SD = 0.12, P < 0.001) and UPRIGHT (mean = −0.17, SD = 0.19, P = 0.004) instructions. In the GRAVITY and UPRIGHT conditions, participants accurately indicated the gravitational vertical but tended to position the MARS past the gravitational vertical, away from the DOB.
Effect of gravity on the perception and control of orientation.
If gravity affects the control and perception of orientation, then the slopes of the regressions of achieved angles and indicated angles on DOB should be <1. For the BALANCE instruction, the slopes for both achieved (P < 0.002) and indicated (P < 0.002) angles were significantly less than unity (paired t-tests). Thus, when the participants were instructed to align with the DOB, both achieved and indicated angles were intermediate between the DOB and the gravitational vertical. The participants tended to fall into 2 groups with 1 group having achieved and indicated angles closer to the gravitational vertical and the other group with achieved and indicated angles closer to the DOB (but with a slope still significantly less than 1).
Loss of control.
Participants rarely lost control of the MARS, on average falling once every 23 trials. Seven participants never lost control, whereas the participant with the poorest performance lost control 26 times over the 120 trials. The number of times that a participant lost control did not depend on the instruction (F3,45 = 1.486, P = 0.23, η2 = 0.090, power = 0.366).
Joystick deflections.
We measured how participants' joystick control actions changed as a function of instruction and DOB. For each trial, we considered joystick deflections that were >10% of the maximum deflection and used those data to calculate the percentage of time that the joystick was deflected leftward vs. rightward. Figure 5A shows that for the GRAVITY instruction, joystick deflections to the left and right were made equally often with the DOB at 0°. With the DOB at 30° (left ear down), participants aligned themselves slightly to the right of the gravitational vertical (described above) and controlled the MARS with leftward joystick deflections exclusively. The reverse was true for a DOB of −30°. For the BALANCE instruction and a DOB of 0°, joystick deflections to the left and right were equally common. With the DOB shifted from 0°, participants oriented themselves between gravity and the DOB (described above), and the asymmetry in joystick displacement direction was less pronounced than for the GRAVITY instruction. The smaller joystick asymmetry across DOBs in the BALANCE instruction was confirmed with a repeated-measures ANOVA that showed a significant interaction between instruction and DOB (F6,90 = 13.81, P = 0.004, η2 = 0.479). Post hoc pairwise tests showed that the asymmetries were significantly lower at the ±30 and ±15° DOBs (P < 0.005 in both cases) but were not significantly different at DOB = −5, 0, and +5°.
We also computed the frequency range of joystick inputs that covered 90% of the power spectral density for each trial. Figure 5B shows that for the GRAVITY instruction the upper frequency of joystick deflections was the highest when the DOB corresponded with the gravitational vertical. When the DOB was displaced from the gravitational vertical, the upper frequency range of joystick deflections decreased. For the BALANCE instruction, the frequency of joystick deflections was less affected by the DOB. A repeated-measures ANOVA showed a significant interaction of instruction × DOB (F2.42,36.29 = 3.432, P = 0.035, Greenhouse-Geisser adjusted, η2 = 0.186, power = 0.930). Figure 5B shows an inverted V-shaped function of DOB for the GRAVITY instruction and a function with a lower peak and higher tails for the BALANCE instruction. The joystick frequency showed a significant quadratic trend across DOBs for GRAVITY (F1,15 = 8.78, P = 0.01, η2 = 0.369) but not for BALANCE. In pairwise comparisons between instructions, the joystick deflection frequency differed only when the DOB was aligned with gravity, with a higher frequency for the GRAVITY instruction than the BALANCE instruction.
MARS performance and pretest postural stability.
The postural stability of participants in the sharpened Romberg stance with their eyes closed was computed in terms of lateral MSA from force plate measurements taken before the MARS experimental trials, where with and xi as the sampled center of foot pressure displacement. Balance data from one participant were lost due to a software error. Correlations between MSA and MARS performance were calculated for the GRAVITY and BALANCE instructions, the two instructions with clearly defined instructed orientations. MSA was not significantly correlated with the mean or standard deviation of achieved or indicated angles for either the GRAVITY (P > 0.46) or the BALANCE (P > 0.12) instructions.
CONTROL EXPERIMENT 1
Methods
Our main experiment involved two potential ly competing attentional demands: controlling the MARS with joystick deflections and making orientation judgments with joystick trigger presses. To determine whether indicating the instructed orientation with a joystick trigger press affected the ability to set the MARS to the instructed orientation, we repeated the main experiment while omitting the indication task.
Participants.
Eight new participants, including 3 women, took part. Their ages ranged from 18 to 39 yr (mean = 29.5 yr). Three had previous experience in the MARS in unrelated tasks. All were without sensory or motor impairments and had signed informed consent statements approved by the Brandeis Institutional Review Board.
Procedure.
Four blocks of trials were presented to the participants. The composition of the blocks was identical to that of the main experiment. At the beginning of each block, 1 of 2 counterbalanced instructions from the main experiment was given, either GRAVITY or BALANCE. Only these 2 instructions were used because the results of the main experiment were nearly identical for the UPRIGHT and GRAVITY instructions, and the OSCILLATION instruction proved a lesser version of the BALANCE instruction. Blindfolded participants seated in the MARS controlled its orientation with the joystick but did not indicate instructed orientations with joystick trigger presses. Their performance was compared with that of the 16 participants in the main experiment.
Results
The data from the 8 new participants were compared with those of the 16 participants in the main experiment who controlled the MARS and made trigger presses to indicate instructed orientations. Figure 6 shows the achieved angles for both instructions (GRAVITY and BALANCE) across DOBs for both experiments. A regression of achieved angle on DOB was calculated for each participant. A 2 (instruction and within-subjects) × 2 (joystick task and between-subjects) mixed MANOVA was performed to determine whether these factors affected regression slopes and intercepts. There was no main effect of joystick task (F1,22 = 2.717, P = 0.11, η2 = 0.110, power = 0.351) and no interaction effect between joystick task and instruction (F2,21 = 0.572, P = 0.57, η2 = 0.052, power = 0.132).
Fig. 6.
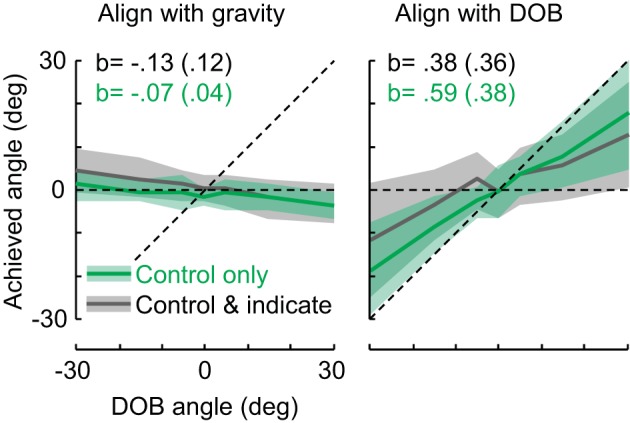
Achieved angles across joystick tasks, instructions, and DOBs. Green: joystick balance control task only; data from control 1, N = 8. Gray: joystick balance control and indication tasks; achieved angle data from main experiment, N = 16. Solid lines show average achieved angles relative to the gravitational vertical, and shaded areas show group standard deviations. Means and standard deviations for slopes, b, of the regressions are inset in the graphs.
Conclusion
Using joystick trigger presses in the main experiment to indicate the instructed orientations did not affect participants' ability to set the MARS to the instructed orientation.
CONTROL EXPERIMENT 2A
Methods
We conducted a second control study to determine whether attempting to set the MARS to an instructed orientation affected the ability to indicate the instructed orientation with a joystick trigger press. In this control, participants were passively moved and pressed the joystick button when they felt they were at the instructed orientation.
Participants.
Six participants from the main experiment took part. All were men and had signed informed consent protocols approved by the Brandeis Institutional Review Board. Their ages ranged from 21 to 34 yr (mean = 30.3 yr).
Procedure.
During the main experiment, recordings had been made of the motion of the MARS. In this control study, each participant's own motion recordings were replayed using embedded time stamps to ensure accurate playback. The participant's sole task was to press the joystick trigger when the MARS was at the gravitational vertical or the DOB as appropriate for the given block (GRAVITY and BALANCE). As in the main experiment, participants were seated in the MARS and blindfolded.
Results
Each participant's performance was compared with his own performance in the main experiment. Figure 7 shows the indicated angles across DOBs, instructions, and control modes (active participant control or passive replay of movement). A regression of achieved angle on DOB was calculated for every participant. A 2 (instruction) × 2 (control mode) repeated-measures MANOVA was performed to determine the influence of these factors on the regression slopes and intercepts. There was no main effect of control mode (F2,4 = 4.183, P = 0.11, η2 = 0.677, power = 0.406) and no interaction effect between control mode and instruction (F2,4 = 2.637, P = 0.19, η2 = 0.569, power = 0.276).
Fig. 7.
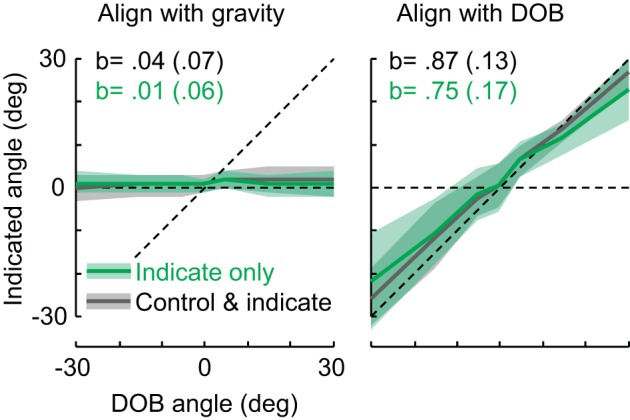
Indicated angles across joystick tasks, instructions, and DOBs. Green: passive motion; data from control 2A, N = 6. Gray: active control; data from main experiment, N = 6. Solid lines show average indicated angles relative to the gravitational vertical, and shaded areas show standard deviations. Means and standard deviations for slopes, b, of the regressions are shown.
Conclusion
Actively displacing the joystick in the balance task in the main experiment did not affect a participant's ability to indicate the instructed orientation by pressing the joystick trigger.
CONTROL EXPERIMENT 2B
Methods
Participants in control 2A had taken part in the main experiment before being tested on passive playback of their own motion recordings. In control 2B, we examined whether naïve and experienced participants differed in their ability to signal the instructed orientation with joystick trigger presses during passive movement replay.
Participants.
Six naïve participants (5 men) took part. Their ages ranged from 18 to 28 yr (mean = 21.3 yr). They were without sensory or motor impairments and had signed informed consent statements approved by the Brandeis Institutional Review Board.
Procedure.
Four blocks of trials were presented during a single session. In each block, a motion recording made during the main experiment was replayed to a blindfolded participant seated in the MARS. The six sets of motion recordings used were the same as in control 2A, and the protocol included the GRAVITY and BALANCE instructions from the main experiment. The participant was instructed to press the joystick trigger when the MARS passed through the gravitational vertical or the DOB as appropriate for the given instruction block (GRAVITY or BALANCE).
Results
The indicated angles from the six naïve participants in control 2B and the six experienced participants from control 2A are shown in Fig. 8. A regression of achieved angle on DOB was calculated for each participant. A 2 (instruction and within-subjects) × 2 (experience level: naïve exposure or repeated exposure and between-subjects) mixed MANOVA was performed to determine whether these factors affected the regression slopes and intercepts. There was no main effect of experience level (F1,10 = 0.000, P = 0.99, η2 = 0.000, power = 0.050) and no interaction effect with instruction (F2,9 = 0.035, P = 0.97, η2 = 0.008, power = 0.054).
Fig. 8.
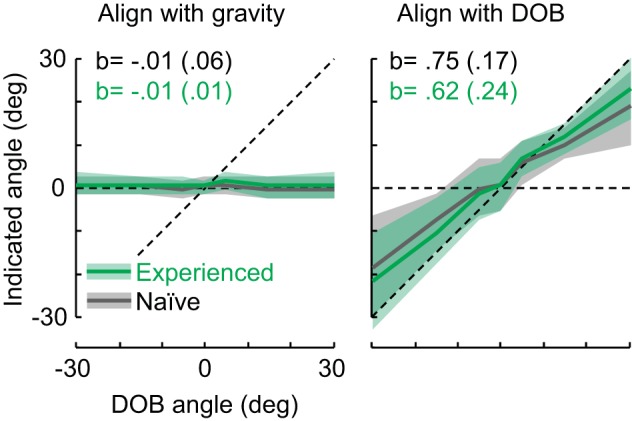
Indicated angles across experience levels, instructions, and DOBs. Gray: naïve exposure; data from control 2B, N = 6. Green: repeated exposure; data from control 2A, N = 6. Solid lines show average indicated angles relative to the gravitational vertical, and shaded areas show standard deviations. Each plot shows the means and standard deviations for slopes, b, of the regressions.
Conclusion
Naïve participants were as accurate as experienced participants in indicating the instructed orientation by joystick trigger presses even though they had never actively controlled the MARS motion.
DISCUSSION
Our goal was to determine whether the active control and perception of balance are dissociable from perception and control of orientation to the gravitational vertical. To assess this possibility, we adopted and expanded the methodology of Riccio et al. (1992), who devised a clever way to uncouple the DOB from the gravitational vertical. We had participants orient themselves using a joystick while seated in our MARS device, which was programmed with inverted pendulum dynamics and a variable DOB. We used seven DOBs (−30, −15, −5, 0, +5, +15, +30°) that covered twice the angular span used by Riccio et al. (1992) to increase the range of physical dissociation of DOB from the gravitational vertical. We used four instructions: 1) align with gravity; 2) align with the upright; 3) align with the direction of balance; and 4) align so that you minimize oscillations. Riccio et al. (1992) had used the single instruction to participants to set themselves to the upright. In addition, our participants had to press the joystick trigger each time they thought they were aligned with the instructed orientation. We thus had measures of both the achieved MARS orientation in relation to the instructed orientation and a perceptual report (a trigger press) each time alignment with the instructed orientation was perceived.
The results show a disparity between the participants' perceptual responses and their positioning of the MARS. Perceptual indications were more accurate than achieved orientations for each instruction. The OSCILLATION condition had the greatest variability. In the GRAVITY and UPRIGHT conditions, participants overshot the gravitational vertical in the direction opposite the DOB. Despite this, they pressed the trigger in near-perfect coincidence with the gravitational vertical. When instructed to align with the DOB (BALANCE), the participants set the MARS between the DOB and the gravitational vertical, underestimating the DOB by about 2/3, but indications of the DOB with trigger presses underestimated the DOB by only about 1/3. These results show that the participants had a significantly more accurate perceptual recognition of both the gravitational vertical and DOB than the distribution of their achieved MARS orientations reflects.
We thought the discrepancy between our results and those of Riccio et al. (1992), who had only used an UPRIGHT condition, might be due to the dual task our participants were performing, both controlling the MARS and using trigger presses to indicate when instructed orientations were achieved. However, in our control studies, we found that the results for achieved angles were unchanged when participants only controlled the MARS. We also found that participants were equally good at perceptual indications of instructed orientations whether they were passively riding in the MARS or actively controlling it.
We were still left with a quandary. Why were the perceptual reports more accurate for the different conditions than the attained MARS orientations? The key came through the realization that the control inputs required to orient the MARS depend on the DOB. When the DOB is at 0° (the gravitational vertical), the MARS is symmetrically unstable. A comparable deviation of the MARS to the left or right can be compensated by joystick deviations of comparable magnitude but opposite directions. Consider what happens when the DOB is shifted to −30° but the participant is trying to set the MARS to 0° (GRAVITY). The MARS is now asymmetrically unstable. The MARS will continually attempt to accelerate away from the DOB, so to keep the MARS near 0° the participant will need to maintain a joystick displacement continually to one side. This asymmetric instability produces the small overshoot of achieved MARS angle away from the DOB seen in the GRAVITY and UPRIGHT conditions. The asymmetry in joystick control is less marked in the BALANCE condition because participants kept themselves aligned between the gravitational vertical and the DOB. Despite the smaller asymmetry in joystick deflections (Fig. 5A), the discrepancy between achieved and indicated angles was actually larger when orienting to the DOB than to the gravitational vertical.
In thinking about why participants in the BALANCE and OSCILLATION conditions might show a shift toward the gravitational vertical when the DOB is offset from 0°, it is important to bear in mind the actual physical situation. For example, in a BALANCE condition with a DOB of −30°, if the participant accurately set his or her body to the DOB, then the otolith organs would be tilted 30° from the gravitational vertical. It is well-known that when individuals are tilted from the vertical while blindfolded for more than several seconds, they will begin to feel less tilted than they actually are and when returned to the gravitational vertical will feel that they have been tilted past it (Mann and Passey 1951; Passey and Guedry 1949). Our trial durations of 45 s are long enough to maximize such a shift in apparent body orientation and may account for why there is a displacement toward gravity when the DOB is offset from 0° in the BALANCE and OSCILLATION conditions.
Postural stability (as measured by MSA) was not correlated with performance in the MARS in any of the conditions. We had thought that perhaps participants who are more stable during upright stance might be better able to control the MARS because it was programmed to exhibit inverted pendulum behavior. However, the absence of a correlation is consistent with the idea advanced by Kiemel et al. (2011) that the complex multilink inverted pendulum of human upright stance is kept stable by a control scheme that does not explicitly minimize sway amplitude.
In summary, our goal was to determine whether the active control of balance is dissociable from or is influenced by control and perception of orientation to gravity. We tested the proposal by Riccio et al. (1992) that “the direction of balance should be perceived as upright or vertical.” We found that the DOB did not influence the perceived direction of the upright and had only a small influence on achieved upright orientation (that could be explained by the asymmetry of the motor task in this condition rather than an alteration of the perceived vertical). Instead, we found the opposite relationship: gravity influenced both the perception of the DOB and the alignment with the DOB, shifting them toward the gravitational vertical. Additionally, we found that participants exposed to passive playback of motion profiles in the MARS were as accurate in their perceptual judgments as participants who were actively controlling the MARS motion. These findings stand in contrast with the assertion of Riccio et al. (1992) that “if control is important for the perception of orientation, the effect of balance would be significantly smaller or absent for passive subjects.” Curthoys and Wade (1990) had criticized Stoffregen and Riccio's original (1988) ecological analysis of balance and orientation, suggesting that it contained logical flaws in its interpretation of data on body orientation collected underwater. Riccio and Stoffregen (1990) replied that “what is needed is a situation in which the DOB can be manipulated independently of GIF” (gravitoinertial force). They went on to construct the clever experimental paradigm that we have used here as well. Our findings, however, show no influence of the act of balancing around an offset DOB on perceptual-motor judgments of the subjective upright or of the apparent gravitational vertical. Instead, we have found, in the absence of vision, otolith and somatosensory signals determine the apparent upright and apparent gravitational vertical.
GRANTS
This work was supported by Air Force Office of Scientific Research (AFOSR) Grant FA9550-12-1-0395.
DISCLOSURES
No conflicts of interest, financial or otherwise, are declared by the author(s).
AUTHOR CONTRIBUTIONS
H.P., A.S.P., P.D., and J.R.L. conception and design of research; H.P. and A.S.P. performed experiments; H.P., A.S.P., and P.D. analyzed data; H.P., A.S.P., P.D., and J.R.L. interpreted results of experiments; H.P. and A.S.P. prepared figures; H.P. and A.S.P. drafted manuscript; H.P., A.S.P., P.D., and J.R.L. edited and revised manuscript; H.P., A.S.P., P.D., and J.R.L. approved final version of manuscript.
ACKNOWLEDGMENTS
We thank Alberto Pierobon for technical support and advice.
REFERENCES
- Angelaki DE, Cullen KE. Vestibular system: the many facets of a multimodal sense. Annu Rev Neurosci 31: 125–150, 2008. [DOI] [PubMed] [Google Scholar]
- Angelaki DE, McHenry MQ, Dickman JD, Newlands SD, Hess BJ. Computation of inertial motion: neural strategies to resolve ambiguous otolith information. J Neurosci 19: 316–327, 1999. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bortolami SB, Rocca S, Daros S, DiZio P, Lackner JR. Mechanisms of human static spatial orientation. Exp Brain Res 173: 374–388, 2006. [DOI] [PubMed] [Google Scholar]
- Bryan AS, Bortolami SB, Ventura J, DiZio P, Lackner JR. Influence of gravitoinertial force level on the subjective vertical during recumbent yaw axis body tilt. Exp Brain Res 183: 389–397, 2007. [DOI] [PubMed] [Google Scholar]
- Carriot J, Brooks JS, Cullen KE. Multimodal integration of self-motion cues in the vestibular system: active versus passive translations. J Neurosci 33: 19555–19566, 2013. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Clauser CE. Moments of inertia and centers of gravity of the living human body. In: Technical Documentary Report No. AMRL-TDR-63-36. Alexandria, VA: Defense Documentation Center for Scientific and Technical Information, 1963. [Google Scholar]
- Curthoys IS, Wade NJ. A balanced view of otolithic function: comment on Stoffregen and Riccio (1988). Psychol Rev 97: 13–134, 1990. [DOI] [PubMed] [Google Scholar]
- Dai MJ, Curthoys IS, Halmagyi GM. Linear acceleration perception in the roll plane before and after unilateral vestibular neurectomy. Exp Brain Res 77: 315–328, 1989. [DOI] [PubMed] [Google Scholar]
- Fitzpatrick R, Rogers DK, McCloskey DI. Stable human standing with lower-limb muscle afferents providing the only sensory input. J Physiol 480: 395–403, 1994. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Gage WH, Winter DA, Frank JS, Adkin AL. Kinematic and kinetic validity of the inverted pendulum model in quiet standing. Gait Posture 19: 124–132, 2004. [DOI] [PubMed] [Google Scholar]
- Glasauer S. Interaction of semicircular canals and otoliths in the processing structure of the subjective zenith. Ann NY Acad Sci 656: 847–849, 1992. [DOI] [PubMed] [Google Scholar]
- Green AM, Angelaki DE. Internal models and neural computation in the vestibular system. Exp Brain Res 200: 197–222, 2010. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Hain TC. A model of the nystagmus induced by off vertical axis rotation. Biol Cybern 54: 337–350, 1986. [DOI] [PubMed] [Google Scholar]
- Imai T, Moore ST, Raphan T, Cohen B. Interaction of the body, head, and eyes during walking and turning. Exp Brain Res 136: 1–18, 2001. [DOI] [PubMed] [Google Scholar]
- Kaptein RG, Van Gisbergen JA. Canal and otolith contributions to visual orientation constancy during sinusoidal roll rotation. J Neurophysiol 95: 1936–1948, 2006. [DOI] [PubMed] [Google Scholar]
- Kiemel T, Zhang Y, Jeka JJ. Identification of neural feedback for upright stance in humans: stabilization rather than sway minimization. J Neurosci 31: 15144–15153, 2011. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Lackner JR, DiZio P. Angular displacement perception modulated by force background. Exp Brain Res 195: 335–343, 2009. [DOI] [PubMed] [Google Scholar]
- Lambert JD. Computational Methods in Ordinary Differential Equations. New York: Wiley, 1973. [Google Scholar]
- Laurens J, Angelaki DE. The functional significance of velocity storage and its dependence on gravity. Exp Brain Res 210: 407–422, 2011. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Mann CW, Passey GE. The perception of the vertical: V. Adjustment to the postural vertical as a function of the magnitude of postural tilt and duration of exposure. J Exp Psychol 41: 108–113, 1951. [DOI] [PubMed] [Google Scholar]
- Merfeld DM, Zupan L, Peterka RJ. Humans use internal models to estimate gravity and linear acceleration. Nature 398: 615–618, 1999. [DOI] [PubMed] [Google Scholar]
- Mittelstaedt ML, Mittelstaedt H. The influence of otoliths and somatic graviceptors on angular velocity estimation. J Vestib Res 6: 355–366, 1996. [PubMed] [Google Scholar]
- Morasso P, Schieppati M. Can muscle stiffness alone stabilize upright standing? J Neurophysiol 82: 1622–1626, 1999. [DOI] [PubMed] [Google Scholar]
- Passey GE, Guedry FE Jr. The perception of the vertical: II. Adaptation effects in four planes. J Exp Psychol 39: 700–707, 1949. [DOI] [PubMed] [Google Scholar]
- Riccio GE, Martin EJ, Stoffregen TA. The role of balance dynamics in the active perception of orientation. J Exp Psychol Hum Percept Perform 18: 624–644, 1992. [DOI] [PubMed] [Google Scholar]
- Riccio GE, Stoffregen TA. Gravitoinertial force versus the direction of balance in the perception and control of orientation. Psychol Rev 97: 135–137, 1990. [DOI] [PubMed] [Google Scholar]
- Stoffregen TA, Riccio GE. An ecological theory of orientation and the vestibular system. Psychol Rev 95: 3–14, 1988. [DOI] [PubMed] [Google Scholar]
- Winter DA. Human balance and posture control during standing and walking. Gait Posture 3: 193–214, 1995. [Google Scholar]
- Zupan LH, Peterka RJ, Merfeld DM. Neural processing of gravito-inertial cues in humans. I. Influence of the semicircular canals following post-rotatory tilt. J Neurophysiol 84: 2001–2015, 2000. [DOI] [PubMed] [Google Scholar]