Scientific Reports 5: Article number: 1076810.1038/srep10768; published online: June112015; updated: September212015
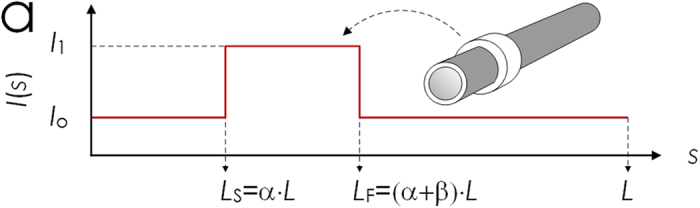
This Article contains a typographical error in Fig. 3a, where ‘LF = β·L’ should read ‘LF = (α + β) · L’. The correct Fig. 3a appears below as Fig. 1.
Figure 1.