

Abstract
Despite the known dangers of driver fatigue, it is a difficult construct to study empirically. Different forms of task-induced fatigue may differ in their effects on driver performance and safety. Desmond and Hancock (2001) defined active and passive fatigue states that reflect different styles of workload regulation. In 2 driving simulator studies we investigated the multidimensional subjective states and safety outcomes associated with active and passive fatigue. Wind gusts were used to induce active fatigue, and full vehicle automation to induce passive fatigue. Drive duration was independently manipulated to track the development of fatigue states over time. Participants were undergraduate students. Study 1 (N = 108) focused on subjective response and associated cognitive stress processes, while Study 2 (N = 168) tested fatigue effects on vehicle control and alertness. In both studies the 2 fatigue manipulations produced different patterns of subjective response reflecting different styles of workload regulation, appraisal, and coping. Active fatigue was associated with distress, overload, and heightened coping efforts, whereas passive fatigue corresponded to large-magnitude declines in task engagement, cognitive underload, and reduced challenge appraisal. Study 2 showed that only passive fatigue reduced alertness, operationalized as speed of braking and steering responses to an emergency event. Passive fatigue also increased crash probability, but did not affect a measure of vehicle control. Findings support theories that see fatigue as an outcome of strategies for managing workload. The distinction between active and passive fatigue is important for assessment of fatigue and for evaluating automated driving systems which may induce dangerous levels of passive fatigue.
Keywords: fatigue, automation, driving scenarios, simulated driving, performance
Driver fatigue is a serious safety problem that costs many people their lives (Lee, 2006; Neubauer, Matthews, & Saxby, 2012). Fatigue has been implicated in approximately 35% of all fatal crashes occurring in rural areas and 12% of those in urban areas (Hartley, 2004). Driver fatigue has multiple sources including circadian rhythms and sleep disturbance (Wijesuriya, Tran, & Craig, 2007; Williamson et al., 2011). The present study is concerned with the task-induced “cognitive fatigue” that is derived directly from prolonged performance of demanding or cognitively involving tasks (Ackerman, 2011). Specifically, we investigated whether two forms of task-induced fatigue, active and passive fatigue (Desmond & Hancock, 2001), differed in their impacts on the driver’s subjective states, cognitive processing, and objective performance.
Brown (2001) suggested that excessive workload, if prolonged, results in “strain” that is experienced as fatigue. Studies show that professional drivers exposed to higher workloads are more vulnerable to fatigue (Feyer & Williamson, 2001; Morrow & Crum, 2004), and prolonged, high workloads may deplete attentional resources and impair sustained attention (Matthews, Davies, Westerman, & Stammers, 2000; Warm, Parasuraman, & Matthews, 2008). Hence, reducing workload may alleviate driver fatigue and resource depletion. Indeed, automobile manufacturers promote automated technology that lowers driver workload as a safety-enhancing feature (Cottrell & Barton, 2013; Funke, Matthews, Warm, & Emo, 2007; Ma & Kaber, 2005). Existing systems of this kind include Adaptive Cruise Control (ACC) and active steering (AS); future advancements in automation supporting driverless vehicles promise to reduce driver workload further. However, there may be different forms of task-induced fatigue, depending on the cognitive load of the task, and the driver’s strategy for workload regulation. Specifically, Desmond and Hancock (2001) distinguished between active fatigue, associated with cognitive overload, and passive fatigue derived from underload and monotony. Workload reduction may be effective only for active fatigue, with passive fatigue calling for different countermeasures (May & Baldwin, 2009). In the present study, we investigated how these states can be understood in relation to contemporary cognitive theories of stress and workload-regulation, as well as their effects on safety.
Active Versus Passive Fatigue
Equating fatigue with the strain of prolonged high workload (Brown, 2001) is known to be an oversimplification. Brown (2001) himself pointed out that the engineering metaphor of strain breaks down in that fatigued operators are aware of their own potential impairment, and may develop adaptive strategies for performance in consequence. The adaptive regulation of stress and fatigue has been elaborated in Hockey’s (1997, 2011, 2012) compensatory control model (CCM), which differentiates “strain” and “disengagement” modes for handling prolonged high-demand/low-control task environments. Broadly, strain is experienced as a combination of effort, negative emotion, and fatigue when the operator strives to maintain performance despite high demands and lack of control. However, fatigue often leads to setting reduced goals for performance that allows for alleviation of discomfort through reduced effort, leading to disengagement from the task and potential performance impairment.
Adaptive workload regulation may be disrupted in both overload and underload conditions (Hancock & Warm, 1989). Desmond and Hancock (2001, p. 601) defined active fatigue as the state change resulting from “continuous and prolonged, task-related psychomotor adjustment.” For example, driving on a busy freeway necessitates frequent steering and pedal responses. Thus, active fatigue is associated with high cognitive workload. By contrast, passive fatigue develops when there is a requirement for “system monitoring with either rare or even no overt perceptual-motor requirements” (Desmond & Hancock, 2001, p. 601). Desmond and Hancock (2001) see active driver fatigue as the form more typically experienced during driving. However, passive fatigue may be induced by driving in low-workload conditions, requiring infrequent use of the controls (especially if cruise control is engaged), but continued vigilance for hazards. Truckers driving on straight highways of low traffic density may be vulnerable. Vehicle automation increasingly places drivers in supervisory roles, which reduces active control and encourages passive fatigue (Desmond, Hancock, & Monette, 1998; May & Baldwin, 2009). Given recent advancements in automated vehicle technology (e.g., ACC), it is important to test for safety risks in automated vehicle operation under fatigue.
Both active and passive fatigue may generate core features of the subjective fatigue response, such as tiredness and aversion to effort (e.g., Fairclough, 2001; Philip et al., 2005). Differences in the subjective expression of the two fatigue types may be assessed using multidimensional measurement frameworks. Matthews et al. (2002) and Matthews, Szalma, Panganiban, Neubauer, and Warm (2013) developed a hierarchical factor model of the affective, motivational, and cognitive states experienced in performance settings. Eleven primary factors support three higher-order factors: task engagement, distress, and worry. Factors are measured by the Dundee Stress State Questionnaire (DSSQ: Matthews et al., 2002). Fatigue corresponds most closely to loss of task engagement, which is defined by energy, interest in the task, and concentration. Task engagement declines especially when the task is monotonous and affords little scope for active control by the operator (Matthews et al., 2002; Matthews, Saxby, Funke, Emo, & Desmond, 2011; Matthews et al., 2013). Both forms of fatigue should depress engagement, but the effect should be larger in magnitude for passive fatigue. By contrast, distress is elevated when workload is high (Funke et al., 2007; Matthews & Campbell, 2009), implying that active fatigue may be associated with heightened distress.
Cognitive Stress Process in Fatigue
The term fatigue can refer both to external agents (sleep loss, circadian rhythms, and prolonged performance) and to the psychophysiological state changes induced by those agents (e.g., tiredness, slow-wave brain activity). The present research aimed to use different task scenarios as the external sources of fatigue, together with assessments of subjective state change. Thus, active fatigue potentially defines both an external task-based manipulation and a pattern of subjective state response. The two perspectives on fatigue are integrated within the transactional theory of driver stress and fatigue. The theory attributes state change to the dynamic interplay between external demands and the operator’s attempts to understand and manage those demands (Lazarus, 1999;Matthews, 2001, 2002). Appraisal and coping processes mediate the impact of the traffic environment on driver state responses (Matthews, 2002; Neubauer et al., 2012). Coping strategies include active management of task demands (task–focus), management of internal discomfort (emotion–focus) and avoidance of noxious situations (Endler & Parker, 1990; Lazarus, 1999). The workload-regulation processes described in leading theories of fatigue and performance (Hancock & Warm, 1989; Hockey, 2012; Szalma & Hancock, 2008) may be associated with distinct styles of appraisal and coping.
Each of the three state factors defined by Matthews et al. (2002) corresponds to a distinctive pattern of appraisal and coping (see Matthews, Warm, Reinerman, Langheim, & Saxby, 2010; Matthews et al., 2013, for reviews). For example, engagement correlates especially with challenge appraisal, high task focus, and low avoidance. Thus, loss of engagement produced by passive fatigue should be associated with congruent changes in these processes. Similarly, if active fatigue elevates distress, it should also influence the cognitive processes underpinning the distress response to overload (e.g., Matthews & Campbell, 2009): appraisals of threat and lack of controllability of the task environment, and increased use of emotion-focused coping.
According to the transactional model, cognitive stress processes may also generate performance change (Matthews, 2001, 2002). Passive but not active fatigue is expected to reduce task-focused coping, leading to loss of performance. The overload associated with active fatigue may produce Hockey’s (1997) “strain” mode, in which the driver is able to fully or partially compensate for the impact of stress on performance by maintaining effort. In this case, active fatigue effects on performance should be less severe than those of passive fatigue.
Matthews and Desmond (2002) addressed some of these issues in a simulator study. Following fatigue induction, drivers showed significant performance impairments (increased heading error) on straight road sections, but not on curved road sections, for which workload was higher. Drivers may have underestimated task demands in the low-workload, straight road sections and withdrawn necessary task focus and effort, accordingly. The fatigue impairment was attributed to maladaptive regulation of underload (Hancock & Warm, 1989), including lowering of performance standards (Hockey, 1997). Fatigue reduced task-directed effort, as shown both by lowered scores on a scale for task-focused coping, and by reduced frequency of smaller-magnitude steering movements on straight sections. The compensatory effort associated with strain (Hockey, 1997) may have served to maintain performance on curved road sections. However, while road curvature may have influenced the type of fatigue experienced, no attempt was made to distinguish active and passive fatigue operationally.
Two studies were run using a driving simulator to test for differential effects of active and passive fatigue inductions on subjective state and performance. Study 1 tested three driving simulation scenarios (active, passive, and control) as a way to elicit and differentiate between active and passive fatigue in relation to different patterns of multidimensional state response, cognitive stress processes, and mental workload. Study 2 employed these scenarios, followed by a performance assessment phase, in order to investigate the impact of the fatigue manipulations on driving performance and safety. We present the two studies separately, followed by a general discussion of their implications for fatigue theory, driver fatigue assessment, and vehicle automation.
Study 1
Study 1 was conducted to validate driving scenarios for inducing active and passive fatigue, by showing that they elicited different patterns of workload, state, and cognitive stress processes. Only limited attention has been given to designing standard scenarios that allow researchers to investigate the effects of stress and fatigue on performance (Matthews et al., 2011). In fact, the development of appropriate simulator program scenarios is one of the challenges to overcome in driving research (Rosenthal, Allen, Christos, & Aphonso, 2004; Klee & Radwan, 2004). Important factors that are likely to induce fatigue include length of drive, lack of variability in stimulation, and workload (Oron-Gilad & Hancock, 2005).
For Study 1, we developed two scenarios derived from the Desmond and Hancock (2001) definitions of active and passive fatigue, quoted previously. In the active fatigue scenario, drivers were exposed to frequent wind gusts requiring corrective steering movements. In the passive fatigue scenario, the vehicle was fully automated. The driver had only to monitor the automation, with no control movements needed. In a control condition, the participant drove normally. Three types of outcome variable were assessed: mental workload, subjective states, and cognitive stress processes. Hypotheses were derived from Desmond and Hancock’s (2001) conceptual account of active and passive fatigue, and empirical studies that link stress processes and workload to subjective state response (Matthews et al., 2013).
Hypothesis 1: Mental workload should be highest in the active fatigue condition and lowest in the passive fatigue condition.
Hypothesis 2: Passive fatigue is characterized by monotony and reduced frequency of vehicle control responses. Hence, it should produce low levels of task engagement, reduced challenge appraisal, and a preference for avoidance rather than task-focused coping.
Hypothesis 3: Active fatigue is characterized by cognitive overload and the need for frequent control responses to prevent performance impairment. Hence, it should produce stress symptoms associated with overload including distress, appraisals of threat and low controllability, and emotion-focused coping, in addition to loss of task of engagement (less than in passive fatigue).
Hypothesis 4: The effects of fatigue are expected to cumulate over time, so that the patterns of response just described should increase in magnitude with increasing drive duration.
Method
Participants
There were 108 participants (66 women, 42 men). All were undergraduates at the University of Cincinnati and ranged in age from 18–40 (M = 19.92 years, SD = 2.65). All participants had a valid driver’s license. Participants with visual impairments were required to wear corrective lenses as indicated by their driver’s license. Cellular phones and watches were removed from participants prior to the start of the drive.
Design
Two parameters of the simulated drive, fatigue condition and task duration, were manipulated independently to create a 3 (fatigue condition) × 3 (drive duration) between-subjects design, with 12 participants assigned at random to each condition.
Task simulation
A Systems Technology, Inc., STISIM Model 400 simulator, was used. It was equipped with a car seat, full-size steering wheel (Logitech MOMO Racing Force Feedback Wheel), and pedals. Speed sensitive “steering feel” was provided by a torque motor. A 42-in high-definition Westinghouse LVM-42w2 Liquid Crystal Display video monitor displayed the roadway and instruments. The three programmed drive conditions (active, passive, and control) consisted of the same road geometry (e.g., straights, curves, hills) and the same background scenery. There was oncoming traffic, but no vehicles in the driver’s lane. Drive durations were 10, 30, and 50 minutes. The road geometry for the 10-min drive was simply repeated three times for the 30-min drive and five times for the 50-min drive. Background scenery was altered across 10-min repetitions to prevent boredom effects, given that monotonous background scenery alone impacts driver fatigue and performance (Thiffault & Bergeron, 2003). Features of the scenery included schools, grocery stores, farms, factories, gas stations, shopping centers, and walking roadside pedestrians. Active fatigue was elicited by programming simulated wind gusts, which required frequent steering and acceleration changes. In the passive fatigue condition, speed and steering were fully automated. Drivers were informed about the automation, and they were told to monitor for a critical signal indicating an automation failure. In this case, one of two red diamonds located in the top left and top right of the display would turn to a downward-pointing arrow. The driver was to respond by pressing the turn signal control. Although automation never actually failed, this feature ensured that drivers were at least somewhat engaged in the supervision of the automated system and not “sleeping at the wheel.” The control condition lacked simulated wind gusts and participants were in full control of the vehicle.
Questionnaire measures
The DSSQ (Matthews et al., 2002) assesses 11 scales for mood, motivation, and cognition in performance settings, grouped into three higher-order factors associated with task engagement (energy, task motivation, concentration), distress (tension, unpleasant mood, low confidence), and worry (self-focus, low self-esteem, task-related thoughts, task-unrelated thoughts). These three factors were estimated from the 11 primary scales using regression weights obtained from a large normative sample (Matthews et al., 2002). They are scaled as standard scores. Primary scales α values ranged from .74–.89 (Matthews et al., 2002); data on validity are reviewed by Matthews et al. (2013). Workload was measured using an embedded version of the NASA-TLX (Hart & Staveland, 1988) that required participants to rate six workload components on 0–10 scales, postdrive. Overall workload was computed as an average of the ratings, ranging from 0–10.
The Appraisal of Life Events scale (ALE: Ferguson, Matthews, & Cox, 1999) measured threat and challenge (six items per scale). These authors reported α values of 0.83 and 0.86, respectively. An additional 8-item scale for uncontrollability (Matthews & Campbell, 2009) was also included (α = .74). Participants rated the task on various attributes, such as “frightening” (threat), “stimulating” (challenge), and “likely to get out of control” (uncontrollability). The ALE was validated in studies of life event stressors (Ferguson et al., 1999), and the extended scale in a study of stress induced by time pressure (Matthews & Campbell, 2009). The Coping Inventory for Task Situations (CITS: Matthews & Campbell, 1998) assesses three basic coping strategies differentiated by Endler and Parker (1990), with items relevant to performance environments. Sample items refer to “making every effort to meet one’s goals” (task-focused coping), “blaming oneself for becoming too emotional” (emotion-focused coping), and “staying detached from the situation” (avoidance). Matthews and Campbell (1998) showed α values for the scales ranging from 0.84–0.86, as well as appropriate sensitivity to task demands.
Procedure
Table 1 specifies the exact sequence of events for both Study 1 and Study 2. In both studies, participants first completed measures of dispositional driver stress not reported here, followed by the pretask DSSQ. After a 3-min practice drive, they performed in the experimental condition to which they were assigned, followed by the posttask DSSQ, including Task Load Index (TLX), ALE and CITS.
Table 1.
Sequence of Events for Studies 1 and 2
| Study 1 | Study 2 |
|---|---|
|
|
Results
Mental workload
Three of the outcome measures proved to be sensitive to both fatigue condition and duration; they are graphed in Figure 1. The upper panel shows workload. Workload was highest in the active fatigue condition. The figure also suggests an interactive effect of condition and duration on workload. In the control condition, workload rose with time, but it was stable in the other two conditions. In the whole sample, mean (and SD) of workload was 4.61 (1.80), a value a little below the scale midpoint of 5, indicating moderate cognitive demand. Effects of task conditions were analyzed using a 3 × 3 (fatigue condition × duration) between-subjects ANOVA. Significant main effects of fatigue condition, F(2, 99) = 44.50, p < .01, partial η2 = .47, and duration, F(2, 99) = 4.23, p < .05, partial η2 = .08, were found, and the interaction between the two factors was also significant, F(4, 99) = 2.60, p < .05, partial η2 = .10. Post hoc Sidak tests were run to test Hypothesis 1. The Sidak test is a variation of the Bonferroni test, which is slightly more powerful as it allows for additional control for experimental error with multiple comparisons (De Muth, 2006). The Sidak tests revealed that workload levels were significantly higher in the active fatigue condition compared to the passive fatigue and control conditions, p < .01 in all cases. In addition, drivers in the passive fatigue condition experienced significantly lower perceived workload compared to those in the control conditions (p < .05).
Figure 1.

Workload (upper panel), task engagement (middle panel), and challenge appraisal (lower panel) by duration and fatigue condition (Study 1). Error bars in all figures are standard errors.
Subjective state
Analyses of subjective state tested whether task-induced changes in state were influenced by the experimental manipulations. We also checked that the groups were equated on the state variables prior to the drives.
Figure 2 shows state change scores (posttest-score–pretest score) as a function of condition, averaged across duration. Means (and SDs) for predrive task engagement, distress, and worry were, respectively, .31 (.87), −.48 (.87), and .10 (.93). Compared to the normative mean of zero, the sample were somewhat elevated in engagement and low in distress; perhaps due to (misplaced) anticipation of enjoyment of the driving simulator. To test for preexisting differences in subjective state scales between groups, we analyzed each pretask scale using a series of 3 (drive duration) × 3 (fatigue condition) between-subjects ANOVAs. Analyses showed no significant pretest differences.
Figure 2.
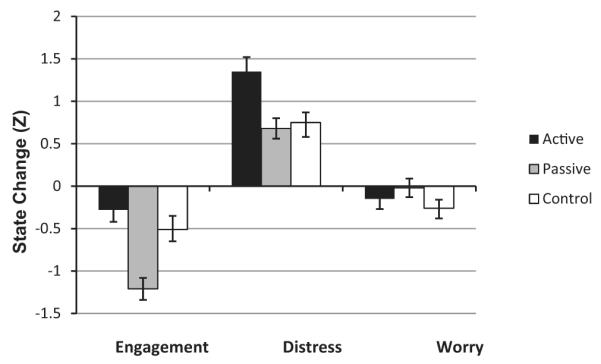
Standardized change scores for subjective state factors by fatigue condition (Study 1).
Active fatigue was distinguished by a large magnitude increase in distress, passive fatigue by a large decrease in task engagement. A series of 3 × 3 × 2 (fatigue condition × duration × phase) mixed-model ANOVAs was used to analyze the effects of experimental manipulations on the three DSSQ factors, testing Hypotheses 2 and 3. Phase contrasted pre- and postdrive states. The main effect of phase, indicating a state change over time, was significant for task engagement, F(1, 99) = 85.03, p < .01, partial η2 = .46, distress, F(1, 99) = 138.44, p < .01, partial η2 = .58, and worry, F(1, 99) = 5.04, p < .05, partial η2 = .05. In the pooled data, engagement declined from pre- to posttask by .67 SD, distress increased by .93 SD, and worry decreased by .13 SD. Main effects of phase were moderated by various significant interactions with fatigue condition and duration. Next, we report these interactions for each DSSQ factor in turn.
Figure 1 (middle panel) shows task engagement as a function of condition and duration. It illustrates two significant interactions: phase × condition, F(2, 99) = 15.05, p < .01, partial η2 = .23, and phase × duration, F(2, 99) = 13.29, p < .01, partial η2 = .21. Task engagement declined most strongly in the passive condition, followed by the control and active conditions (see also Figure 2). Planned follow-up ANOVAs confirmed that the main effect of phase was independently significant in active, F(1, 33) = 5.22, p < .05, partial η2 = .14, passive, F(1, 33) = 93.49, p < .01, partial η2 = .74, and control conditions, F(1, 33) = 15.79, p < .01, partial η2 = .32. Sidak tests run to compare postdrive engagement means showed a significant difference between active and passive conditions (p < .01). Mean engagement in the control condition was lower than in the active condition (p < .05), but higher than in the passive condition (p < .05).
Figure 1 (middle panel) also illustrates the phase × duration interaction. Loss of engagement tended to be higher at longer durations. Sidak tests comparing posttask scores showed that the means for 10 and 50 min differed significantly (p < .01), but neither differed significantly from the 30-min mean. The figure suggests an earlier decline in engagement in the passive than in the other two conditions, but the phase × condition × duration interaction was nonsignificant.
For distress, there was a significant phase × fatigue condition interaction, F(2, 99) = 7.31, p < .01, partial η2 = .13, but the phase × duration interaction was not significant. The main effect of condition was also significant, F(2, 99) = 3.11, p < .01, partial η2 = .06. Figure 2 shows that distress increased from pre- to postdrive, especially in the active fatigue condition. Sidak tests for postdrive means confirmed that distress was higher in the active than in the passive (p < .01) and control (p < .05) conditions, but passive and control conditions did not differ significantly.
For worry, the phase × duration interaction was significant, F(2, 99) = 3.83, p < .05, partial η2 = .07. Posttask means (and SDs) for the 10-, 30- and 50-min durations were −.57 (0.85), .05 (1.03), and −.24 (.95). Sidak tests showed a significant difference (p < .05) between 10 and 30 min only. Short duration drives depressed worry below the pretask level of .10, but worry returned to values close to baseline at longer durations. The elevations of worry seen in field studies (Desmond & Matthews, 2009) may not be evident over the relatively short durations used here.
Appraisal and coping
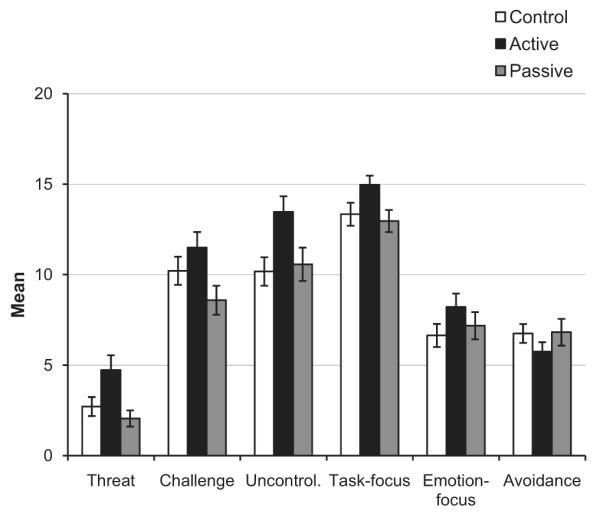
Figure 3 shows the means for ALE and CITS data, suggesting higher values for all variables in the active compared to the passive condition. ALE and CITS data were analyzed using a series of 3 × 3 (fatigue condition × duration) ANOVAs. Main effects of fatigue condition were significant for threat, F(2, 99) = 12.55, p < .01, partial η2 = .20; challenge, F(2, 99) = 18.59, p < .01, partial η2 = .27; uncontrollability, F(2, 99) = 24.91, p < .01, partial η2 = .34; task-focus, F(2, 99) = 3.29, p < .05, partial η2 = .06; and emotion-focus, F(2, 99) = 24.91, p < .01, partial η2 = .25. Sidak tests showed that individuals in the active fatigue condition had significantly higher levels (p < .05 or better) of all five variables compared to the control condition. Means in active and passive conditions also differed significantly for all variables except for task-focused coping. The only difference between passive and control conditions was for challenge appraisal (p < .05), which was lower in the passive fatigue condition.
Figure 3.
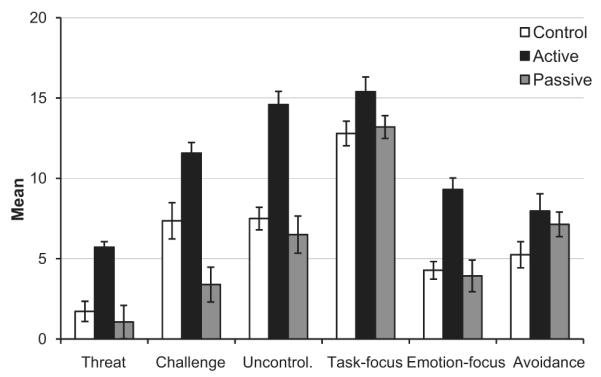
Appraisal and coping scales by condition (Study 1). (Uncontrol. = Uncontrollability)
Three appraisal and coping dimensions proved to be sensitive to duration as illustrated in Figure 4. Main effects of duration were significant for uncontrollability, F(2, 99) = 3.29, p < .05, partial η2 = .06, and for emotion-focused coping, F(2, 99) = 4.32, p < .05, partial η2 = .08. Figure 4 suggests a curvilinear effect of duration on both variables, with highest scores obtained at 30 min. Two significant (p < .05) differences in means for these variables were revealed by Sidak tests. Uncontrollability was higher at 30 min compared to 10 min, and emotion-focus was lower at 50 min compared to 30 min. Thus, uncontrollability reached a maximum at 30 min, whereas use of emotion-focus tended to decline at the longest duration. Finally, there was a significant interactive effect of condition and duration for challenge, F(4, 99) = 2.50, p < .05, partial η2 = .09. The interactive effect of condition and duration on challenge is shown in Figure 1 (lower panel). Temporal change in challenge was largely limited to the control condition, in which challenge was initially high, but declined to a level similar to passive fatigue at the 50 min duration.
Figure 4.

Uncontrollability and emotion-focus coping over time (Study 1).
Table 2 summarizes the characteristics of active and passive fatigue based on the analyses of subjective measures. Each entry corresponds to a significant difference between the fatigue condition and the control condition, as confirmed by the Sidak test.
Table 2.
Summary of Characteristics of Active and Passive Fatigue, Relative to the Control Condition, Based on the Outcomes of Post Hoc Sidak Tests (Study 1)
| Workload | Subjective state | Appraisal | Coping | |
|---|---|---|---|---|
| Active fatigue | High workload | High distress | High challenge | High task focus |
| High task engagement | High threat | High emotion focus | ||
| High uncontrollability | ||||
| Passive Fatigue | Low workload | Low task engagement | Low challenge |
Discussion
Study 1 confirmed that the active and passive fatigue conditions elicited qualitatively different patterns of subjective state, stress process, and workload response, mostly as predicted from the Desmond and Hancock (2001) theory. In addition, the influence of duration on state change differed for the two fatigue inductions. Results also suggested that wind gust and automation manipulations are effective techniques for inducing fatigue in simulator studies.
Consistent with Hypothesis 1, workload was highest in the active fatigue condition, and lowest in passive fatigue. Thus, the findings conflict with a simplistic strain model in which high workload directly elicits fatigue. Passive fatigue effects, specified in Hypothesis 2, were partly confirmed. As expected, loss of task engagement, the primary index of fatigue state, was greatest in the passive fatigue condition. Furthermore, challenge appraisal was lowest in passive fatigue, despite efforts to reduce monotony through interesting background scenery (see Thiffault & Bergeron, 2003). Methodologically, configuring the simulator to manipulate perceived challenge may thus be the key to controlling passive fatigue experimentally. However, predicted effects of passive fatigue on coping were not found, implying that participants remained motivated toward maintaining performance standards. Thus, the lack of challenge afforded by automated driving may be the primary influence on the large-magnitude loss of engagement induced by the passive fatigue manipulation.
The predicted effects of the active fatigue manipulation (Hypothesis 3) were largely confirmed. Active fatigue produced a stable, large-magnitude increase in distress; task engagement was actually higher in the active fatigue condition than in the control condition. Active fatigue also had wide-ranging impacts on stress processes. The task was appraised as more threatening, challenging, and uncontrollable, and both task-focused and emotion-focused coping were elevated. Broadly, the task was as much stressful as fatiguing, and the response pattern was suggestive of Hockey’s (1997) “strain mode,” in which compensatory effort is applied to maintain task focus and performance under cognitive load. The increase in emotion-focus might be interpreted as a consequence of the loss of control experienced due to the simulated wind gusts.
We expected that fatigue states would become more pronounced over time (Hypothesis 4). In fact, effects of duration were typically of smaller magnitude than those of fatigue condition. As predicted, task engagement decreased over time; indeed, the effect of duration was independently significant in all three conditions, and so all can be said to be “fatiguing.” Similarly, in a study of real driving, Desmond and Matthews (2009) found that trip duration was negatively correlated with energetic arousal, one of the components of task engagement. However, effects of duration on the stress process variables were modest and, in the cases of uncontrollability and emotion-focus, nonmonotonic. Challenge declined only in the control condition, implying that normal simulated driving was initially interesting, but became monotonous over time. Thus, low and/or declining challenge may contribute to loss of engagement, but it cannot fully account for the temporal trend in the fatigue state.
Study 1 confirmed that manipulations of active and passive fatigue elicited differing patterns of state response and cognitive stress processes, consistent with existing theories (Desmond & Hancock, 2001; Hockey, 2012; Matthews, 2001; May & Baldwin, 2009). However, subjective state changes do not indicate directly how active and passive fatigue may influence safety. Thus, Study 2 compared the effects of active versus passive fatigue on objective performance measures, including a measure of lateral control of the vehicle, as well as braking and steering response times to an emergency event.
Study 2
Although Study 1 confirmed that manipulations of active and passive fatigue elicited differing patterns of state response, subjective state change does not necessarily signal performance impairment (Hockey, 1997). Nevertheless, the distinct fatigue states observed in Study 1 might impact driver performance and safety differently. Low task engagement has been linked to impairments in vigilance (Matthews, Warm, Reinerman, Langheim, Washburn et al., 2010), visual search (Matthews et al., 2011), and impaired executive control (Matthews & Zeidner, 2012). Distress, which overlaps with anxiety, is also linked to a variety of deficits in attention and working memory (Eysenck & Derakshan, 2011;Matthews & Campbell, 2010). Study 2 was designed to test how active and passive fatigue inductions influence objective performance.
Active fatigue increases the risk of overload of attention. Cognitive stress processes elicited by overload, especially perceived lack of control and emotion-focused coping, divert attention from the task (Matthews & Campbell, 2009). Other research suggests drivers may manage overload relatively well. In Hockey’s (1997, 2012) account of “strain” mode, compensatory effort often preserves performance effectively. Driver stress is more damaging to performance in underload than in overload conditions (Matthews, 2002). Similarly, Matthews and Desmond (2002) found that fatigue impaired vehicle control only during low-workload driving.
To test the hypothesis that passive fatigue produces larger performance deficits than active fatigue, a modified version of Study 1 was conducted. A short supplementary drive was performed following fatigue induction, so that performance could be assessed under the same task conditions. During this drive, a critical emergency event requiring rapid evasive response was programmed, providing a direct test of driver alertness. We also used durations of 10 and 30 min only, given that in Study 1 the latter was long enough to provoke substantial loss of engagement, and to differentiate the three participant groups. It was also hypothesized that fatigue condition would have similar effects on subjective state and cognitive processes to those seen in Study 1.
Method
Participants
One-hundred and 68 (108 women, 60 men) University of Cincinnati undergraduates took part in this study. Ages ranged from 18–30 (M = 19.43 years, SD = 1.86). All participants had a valid driver’s license for a mean duration of 3.52 years (SD = 1.97). Participants with visual impairments were required to wear corrective lenses as indicated by their driver’s license. Cellular phones and watches were removed from participants prior to the start of the drive.
Design
A 2 (drive duration) × 3 (fatigue condition) between-subjects design was used. Twenty-eight participants were assigned at random to each of the six cells of the design. Drive durations were 10 and 30 minutes; fatigue conditions were passive, active and a control condition.
Task simulations
Tasks were similar to those of Study 1 with the following differences. The number and intensity of wind gusts were increased in the active fatigue condition in order to elevate workload levels. Also, additional elements of road geometry (e.g., more hills and road curvature) were included and background scenery was elaborated to include sandy beaches, bicycle races, tunnels, more roadside towns, and “mountain zones.” The intent was to maintain task interest in the control condition. The supplementary drive used for performance assessment lasted 4 min and began immediately following the main drive (i.e., after 10 or 30 min). The road was flat and straight with oncoming traffic, but no traffic in the driver’s lane. Wind gusts were turned off for the active fatigue condition and automation was terminated for the passive fatigue condition. At approximately 2 min and 30 s into the supplementary drive, an emergency event was introduced (a parked van unexpectedly pulled out in front of the participant’s vehicle). Performance was assessed by measuring standard deviation of lateral position (SDLP) as well as braking and steering response times (RTs) to the event.
Procedure
Questionnaires were completed pre- and postdrive as in Study 1. Performance (SDLP) was assessed in the 3-min practice phase, in order to assess any initial differences in driving skill between groups. The supplementary drive immediately followed the main drive. Participants in the passive fatigue condition were informed in advance that they would need to regain control of the vehicle should automation fail, which took place between main and supplementary drives.
Results
Workload
A 2 (drive duration) × 3 (fatigue condition) between-subjects ANOVA was conducted to analyze for effects on perceived mental workload. A significant main effect was found for condition, F(2, 162) = 5.82, p < .01, partial η2 = .07. As in Study 1, post hoc Sidak tests revealed that workload was significantly higher in the active fatigue condition than the passive condition, p < .01. There were no main or interactive effects of duration.
Subjective state
Means (and SDs) for predrive task engagement, distress and worry were, respectively, .23 (.86), −.35 (.79) and −.07 (1.01). Predrive DSSQ scores were analyzed using a series of 2 (drive duration) × 3 (fatigue condition) between-subjects ANOVAs. Analyses for task engagement and worry showed no significant pretest differences, p < .05. The ANOVA for distress showed a significant condition × duration interaction, F(2, 162) = 3.07, p = .05; however, post hoc Sidak tests were not significant, p > .05. The small magnitude of effect combined with the nonsignificant post hoc tests implies minor preexisting differences in distress.
Figure 5 shows state changes as a function of fatigue condition, averaged across duration. Similar to Study 1, the largest decline in engagement was seen in the passive condition, and decreases in worry were small in all conditions. Contrasting with Study 1, increases in distress were similar in all conditions. Effects on state were analyzed using 3 × 2 × 2 (fatigue condition × duration × phase) mixed-model ANOVAs. The main effect of phase was significant for task engagement, F(1, 162) = 35.04, p < .01, partial η2 = .18; distress, F(1, 162) = 136.95, p < .01, partial η2 = .46; and worry, F(1, 162) = 21.26, p < .01, partial η2 = .12. Averaged across all conditions, means (and SDs) for the three states in the posttask data were, respectively, −.08 (.99), .40 (.91), and −.30 (1.07). Relative to baseline, engagement decreased (Δ = −.31 SD), distress increased (Δ = .75), and worry decreased (Δ = −.23).
Figure 5.
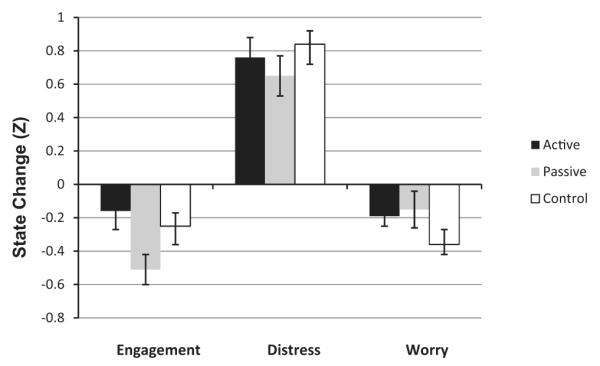
Standardized change scores for subjective state factors by fatigue condition (Study 2).
Further interactions between factors were found only for task engagement. The effect of phase was modified by both condition and duration, as shown in Figure 6. A significant condition × phase interaction, F(2, 162) = 4.19, p < .05, partial η2 = .05, confirmed the sensitivity of engagement to passive fatigue. Post hoc Sidak tests conducted on the postdrive scores revealed that the passive fatigue condition elicited significantly lower task engagement compared to the active fatigue condition, p < .01. Means in the control condition did not differ significantly from those in the other two conditions.
Figure 6.
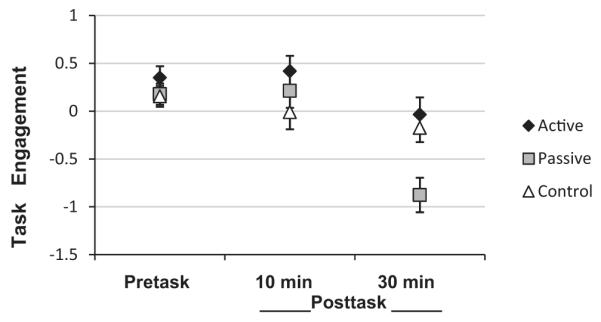
Task engagement by duration and fatigue condition (Study 2).
Figure 6 shows that engagement declined across time, especially in the passive fatigue condition. The duration × phase interaction was indeed significant for task engagement, F(1, 162) = 22.57, p < .05, partial η2 = .12, as was the main effect of duration, F(1, 162) = 6.58, p < .05, partial η2 = .04. However, although there was a significant condition × duration interaction, F(1, 162) = 3.65, p < .05, partial η2 = .04, the condition × duration × phase interaction was nonsignificant. No further effects of the task variables were found for distress or worry, p > .05.
Appraisal and coping
Figure 7 shows that ALE and CITS means were highest in the active condition for all scales except avoidance coping. Data were analyzed using 3 × 2 (fatigue condition × duration) ANOVAs. Main effects of condition were found for threat, F(2, 162) = 5.06, p < .05, partial η2 = .06; challenge, F(2, 162) = 3.49, p < .05, partial η2 = .04; and task-focused coping, F(2, 162) = 3.26, p < .05, partial η2 = .04. Post hoc Sidak tests revealed that challenge, threat, and task-focus were all significantly higher (p < .05) in active than in passive fatigue; the test for uncontrollability fell short of significance (p = .058). Also, uncontrollability was higher in the active fatigue than in the control condition (p < .05). The only other significant effect was the main effect of duration on challenge appraisal, F(2, 162) = 15.17, p < .01, partial η2 = .09. Mean challenge declined from 11.85 at 10 min to 8.35 at 30 min.
Figure 7.
Appraisal and coping scales by fatigue condition (Study 2). (Uncontrol. = Uncontrollability)
Performance measures
A 3 × 2 (fatigue condition × duration) ANOVA revealed no significant differences in baseline SDLP across conditions during the initial performance phase, F(2, 162) = .67, p > .05, partial η2 = .01. We analyzed vehicle control data prior to the critical event—that is, the van suddenly pulling in front of participants—after the conclusion of the main drive (fatigue induction). Precritical event SDLP was sampled during a two min 30 s interval, divided into five 30 s sections. We also analyzed response latencies for use of the controls following the critical event, as the van pulled into the road in front of the driver.
Precritical event SDLP
Individuals in the passive drive had to gain control of steering after automation shut down. Figure 8 shows SDLP as a function of 30 s section and fatigue condition, confirming higher SDLP during the first 30 s section. Thus, data from the last four sections only were analyzed, using a 2 (drive duration) × 3 (fatigue condition) × 4 (section) mixed-model ANOVA. The only significant effect was the main effect of condition, F(2, 162) = 3.69, p < .05, partial η2 = 03. Post hoc Sidak tests showed that the passive fatigue condition led to significantly (p < .05) lower SDLP (M = .75, SD = .26) compared to the active fatigue condition (M = .89, SD = .30).
Figure 8.
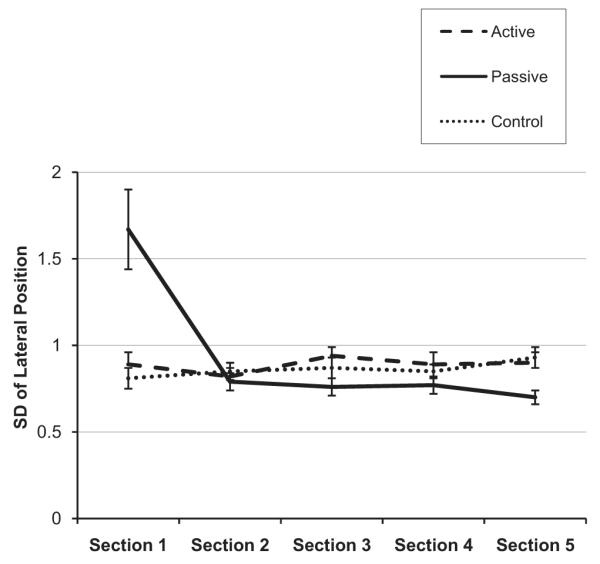
Precritical event SDLP for five 30 s intervals, by fatigue condition (Study 2).
Response times
Mean braking and steering RTs for participants in the active, passive, and control conditions are illustrated in Figure 9. Braking and steering (swerving) RTs to the unexpected event were recorded. Drivers who did not respond at all using the specified control were excluded from the relevant analysis, leaving ns of 146 and 157 for the steering and braking analyses, respectively. For steering reaction time (RT), a main effect of condition was found, F(2, 140) = 4.03, p < .05, partial η2 = .05. Post hoc Sidak tests revealed that individuals in the active condition (M = .65, SD = .58) had significantly faster steering RTs than those in the passive condition (M = 1.02, SD = .73). A main effect of condition was found for braking, F(2, 151) = 6.92, p < .01, partial η2 = .08. Drivers in the active condition (M = 1.16, SD = .30) and control condition (M = 1.22, SD = .28) had faster braking RTs than those in the passive condition (M = 1.38, SD = .35), p < .01.
Figure 9.
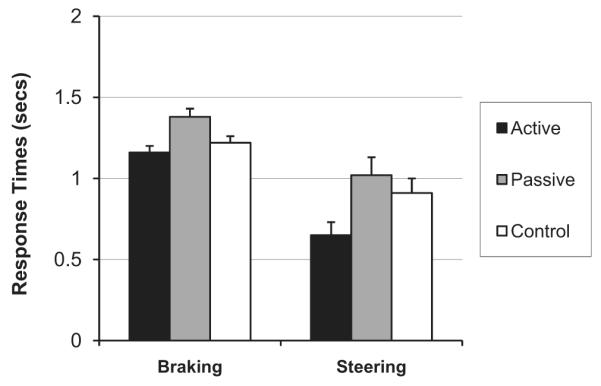
Response times for braking and steering by fatigue condition (Study 2).
Collision data
The majority of drivers collided with the van; Figure 10 gives the frequencies (out of 28) for drivers who avoided collision in each condition. Drivers in the active fatigue condition were most likely to avoid collision, followed by those in the control and passive fatigue conditions. Individuals in the 10-min drive were more likely to avoid collision than during the 30-min drive. Indeed, no drivers in the 30-min passive fatigue condition were able to avoid collision. A chi-square test was performed to examine the relation between the three fatigue conditions and the frequency of collision avoidance, on the basis of the 3 × 2 contingency table relating frequencies of colliders and noncolliders to condition. Duration was not included because expected frequencies in some cells of the contingency table fell below 5, violating an assumption of the test. The relative proportions of colliders in the three conditions deviated significantly from chance expectations, χ2(2, N = 168) = 9.04, p < .05.
Figure 10.
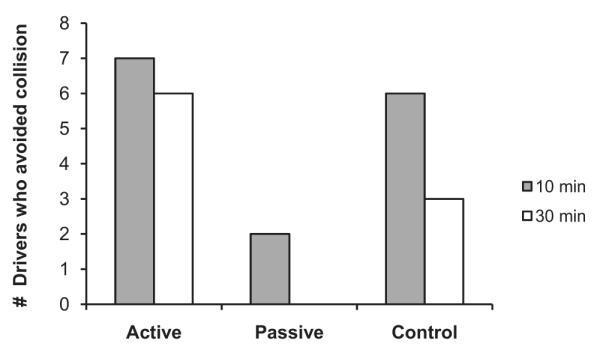
Number of participants able to avoid collision by fatigue condition and duration (Study 2).
Discussion
As in Study 1, task engagement and challenge appraisal were lowest in the passive fatigue condition. Increasing drive duration also tended to depress engagement and challenge. Duration and fatigue condition had additive effect on these variables. As in Study 1, active fatigue elevated task-focused coping and appraisals of threat and uncontrollability. However, unlike the previous study, distress was elevated across all conditions, and condition did not influence emotion-focused coping. A difference between the studies is that, in Study 2, drivers rated how they felt in the supplementary drive, which was the same for all drivers, whereas in Study 1 drivers rated how they felt in the latter part of the relevant fatigue condition. Thus, Study 2 picked up aftereffects of the fatigue manipulations that persisted into the supplementary drive. Lowered engagement in passive fatigue demonstrated such persistence, but the elevation of distress and emotion-focus produced by active fatigue in Study 1 may be more transient. Also, the emergency event may have provoked similar distress responses in all three conditions.
Drivers in the passive fatigue condition had the slowest steering and braking RTs to the unexpected event. They were also most likely to collide with the van. Thus, placing drivers in supervisory roles as opposed to being actively engaged in the driving task impairs performance as well as subjective state. Young and Stanton (2007) also found that braking RTs were slowed by automated driving. Unexpectedly, vehicle control (measured by SDLP) was actually best in the passive fatigue condition. Although SDLP is widely used to measure driver performance (Brookhuis, De Waard, & Fairclough, 2003), it may not be a valid index of driver alertness. In fact, reduced SDLP may not always indicate better performance. In a study involving conversation and driving, Becic et al. (2010) noted, “A variably moving system is potentially a more responsive system; thus, the greater variability in the continuous driving measures when there is no conversation may help explain nonconversing drivers’ faster reactions to sudden external events” (pp. 6). Reduced SDLP may to an extent signal limits on the driver’s attention and ability to respond quickly and effectively.
General Discussion
Together, Studies 1 and 2 confirmed the theoretical and practical utility of Desmond and Hancock’s (2001) model of active and passive fatigue, and validated simulator methodologies for eliciting these states. In both studies, the passive fatigue conditions produced large-magnitude loss of task engagement, together with reductions in challenge and task-focus, and slowed responding to the emergency event in Study 2. Active fatigue combined stress—illustrated most consistently by elevations of threat and uncontrollability appraisals, and elevated distress in Study 1—with at most modest loss of engagement. Active fatigue did not impair performance. Fatigue responses somewhat resembling passive fatigue were also seen in the control condition, especially at the longest duration in Study 1. Thus, both states are associated with characteristic patterns of cognitive stress processes, defining differing styles of workload regulation, broadly as suggested by existing fatigue theory (Hockey, 1997; Matthews, 2001). Passive fatigue poses a more immediate threat to safety than active fatigue, implying that caution is needed in the development and implementation of automated vehicle systems. Indeed, the results suggest that reducing mental workload via automation may actually exacerbate passive fatigue, and impair the safety-critical performance abilities of alertness and fast response to hazards. We will discuss further the theoretical and practical implications of the present findings.
Theoretical Implications
Fatigue, task demands, and coping
Broadly, findings support Hancock and Warm’s (1989) effort regulation theory, which asserts that operator discomfort reflects dynamic instability in workload management, rather than level of workload per se. Active and passive fatigue reflect dysfunction in workload regulation associated with overload and underload, respectively. Similarly, in terms of Hockey’s (1997, 2011, 2012) control theory, active fatigue might correspond to adaption to workload through strain (effort with distress), whereas passive fatigue could be a form of disengagement (distress without effort).
Findings with the cognitive stress process measures illuminate the differing styles of workload regulation associated with active and passive fatigue. In fact, active fatigue resembles Hockey’s strain mode (effort with distress), but passive fatigue differs from Hockey’s (2011) description of disengagement mode in two respects. First, although effort reduction produces distress but not fatigue, the passive fatigue manipulation elicited the lowest levels of task engagement. Second, the coping findings here do not suggest any voluntary attempt to manage fatigue by effort reduction. Passive fatigue produced less task focus than active fatigue, but task focus did not differ in passive and control conditions. Avoidance was insensitive to the fatigue manipulation. Moreover, CITS means suggested that task focus was the predominant mode of coping in all conditions, as in most performance settings (Matthews & Campbell, 1998). Fatigued drivers may be effort averse (Brown, 2001), but participants did not simply “give up” on the task. By contrast, vigilance tasks evoke more pronounced changes in coping, including decreases in task focus and increases in avoidance (Matthews, Warm, Reinerman, Langheim, Washburn et al., 2010).
Lack of control and fatigue
Active and passive fatigue might both be forms of Hockey’s (2011, 2012) strain mode, differing in the strength of activation of task goals. Hockey (2011) describes fatigue as a state of goal conflict, in which fatigue reflects awareness of both the need for high task-directed effort and of failure to maintain task goals. On monotonous tasks, such as vigilance, goal activation decays as cognitive fatigue develops. Frequent exogenous demands for control activities, as with wind gusts, maintain task goal activation, alleviating the goal conflict and hence fatigue. In automated driving, however, the driver must maintain endogenous attention to goals, which may be difficult to sustain, eliciting the passive fatigue response. Goal activation may be especially hard to sustain if the task lacks intrinsic interest, as shown here by the effects of passive fatigue on challenge appraisal, and if the task is highly constrained, as shown by results from vigilance studies (Szalma et al., 2004). Tasks that allow the operator more scope for controlling task demands help to maintain task engagement (Matthews, Warm, Reinerman, Langheim, & Saxby, 2010).
Task duration and fatigue
Dynamic control theories (Hancock & Warm, 1989) suggest that sustaining workload management in demanding performance should lead to increasing state changes over time. Here, state and process differences between the conditions became evident over fairly short durations, and certainly after 30 min. Task engagement and challenge appraisal were the variables most prone to show phase × duration interactions. In Study 1, challenge declined with duration only in the passive fatigue condition, showing a dissociation between duration effects on challenge and on task engagement, which declined in all three conditions. Coping was not consistently affected by duration. Thus, loss of task engagement cannot be fully attributed to temporal changes in appraisal and coping variables. The effects of duration may also reflect self-regulative processes that the current cognitive measures fail to index, such as metacognitions of fatigue (Maher-Edwards, Fernie, Murphy, Wells, & Spada, 2011), and/or implicit processes that are not well measured by self-report (Matthews, Desmond & Hitchcock, 2012).
Effects of active versus passive fatigue on performance
Drivers in the passive fatigue condition combined more accurate vehicle control with significantly delayed brake and steering RTs. Detrimental effects of fatigue on alertness may be attributed either to loss of attentional resources, as in vigilance (Warm et al., 2008), or to strategic reduction in allocation of effort (Hockey, 1997). The two mechanisms may be dissociated by testing for moderator effects of workload: increasing workload should exacerbate performance effects due to resource insufficiency, and alleviate effects due to effort underallocation. In simulated driving, both fatigue (Matthews & Desmond, 2002) and stress (Matthews, Sparkes & Bygrave, 1996) effects are more prevalent when task demands are low, supporting an effort-regulation hypothesis. On-road studies also demonstrate driver vulnerability to underload (Oron-Gilad & Ronen, 2007). The present data fit this explanation, in that fatigue was more harmful in the lowest workload condition (i.e., passive fatigue induction). However, with no workload manipulation during the performance assessment phase of the drive, the explanation remains tentative. It cannot be excluded that passive fatigue effects on alertness are mediated by the loss of resources associated with low task engagement (Matthews, Warm, Reinerman, Langheim, Washburn et al., 2010).
Applications
We highlight two applications for the research. First, the qualitative differences between active and passive fatigue show the importance of multidimensional assessment of fatigue states in applied settings. Second, the ease with which passive fatigue is induced has implications for use of automation in vehicles.
Implications for driver fatigue assessment
Performance measures are often considered the “gold standard” for fatigue measurement. Nevertheless, despite the limitations of self-reports (see Ingre, Akerstedt, Peters, Anund, & Kecklund, 2006), the present studies reveal the utility of multivariate subjective measures in differentiating qualitatively different fatigue states and behavioral prediction. For example, the “improved” vehicle control shown by the drivers in the passive fatigue condition fails to align with their likelihood of collision and decreased response times. Rather, the loss of safety associated with passive fatigue may be best predicted from state and process indicators, that is, the combination of low workload, decreased task engagement and low challenge. The rapid onset of the passive fatigue state suggests that subjective scales may pick up vulnerabilities to performance deterioration that occur prior to performance change. In the Hancock and Warm (1989) model, subjective discomfort serves as an early warning of dynamic instability.
Practical contexts in which objective measures should be supplemented with multidimensional subjective measures include the evaluation of safe work shift durations for commercial drivers, and evaluation of driver populations especially sensitive to fatigue including less experienced drivers (Belz, Robinson, & Casali, 2004), and those with clinical disorders such as Parkinson’s disease (Zesiewicz et al., 2002). Given concerns about in-vehicle technologies, multidimensional assessment should also be used in evaluating the impact of automated systems during extended-duration driving. We focus here on driving, but findings may generalize to other venues for human–computer interaction (Szalma & Hancock, 2008). Relevant industrial and transportation contexts that feature automation include process control (Sauer, Kao & Wastell, 2012) and operation of remotely piloted vehicles (Tvaryanas & MacPherson, 2009).
Implications for vehicle automation
Findings support May and Baldwin’s (2009) claim that discrimination of active and passive fatigue will lead to improved development and implementation of fatigue countermeasures. Countermeasures directed toward crash prevention, including lane departure warnings and collision avoidance warning systems, should be effective for both types of fatigue. However, automation that reduces workload may only be effective for active fatigue. For passive fatigue, May and Baldwin recommend delivery of secondary tasks that enhance the novelty and demands of driving. For example, Gershon, Ronen, Oron-Gilad, and Shinar (2009) showed that an interactive trivia question game was effective in reducing the fatigue of underload.
Existing automated systems such as ACC and AS may increase passive fatigue, and the technologies supporting future driverless vehicles may be even more dangerous. The impairments in alertness evident in both subjective and behavioral data raise serious concerns regarding current safety recommendations pertaining to the use of automated systems. For example, statutory institutions (VicRoads, 2007) currently recommend that cruise control may help reduce fatigue during long drives. Yet, the present studies support existing concerns about vehicle automation (Young & Stanton, 2004, 2007) by demonstrating that removing workload when task demands are already low may place fatigued drivers at increased risk for accidents. Studies of real-life driving accidents demonstrate that underload conditions are often implicated in fatal road crashes involving fatigue (Road Safety, 2005). Consequently, even currently used automated systems should be used with caution.
Limitations
Obviously, simulator findings may not generalize to real driving. However, the patterns of subjective fatigue and stress responses seen in simulator studies correspond, at least approximately, to those seen in real drives (Desmond & Matthews, 2009; Matthews, 2002; Matthews et al., 2011). Furthermore, the tendency of drivers to use task focus rather than avoidance coping suggests that they took the task seriously, even in the more trying conditions. The controlled environments afforded by simulation may be especially helpful in identifying the specific psychological mechanisms and processes that may operate in real driving, including loss of attention, choice of coping strategies, decision making, and reluctance to apply effort (Fairclough, 2001; Matthews et al., 2011).
The durations used were relatively short; real driving may occupy periods of several hours. Certainly, differing patterns of subjective and performance change might emerge over durations exceeding one hour. In particular, prolonged active fatigue may come to be more hazardous than the present findings suggest, especially if the temporal trend in task engagement seen in Study 1 continued. In defense of the present method, patterns of subjective response do not differ greatly from those seen in longer-duration real driving (Desmond & Matthews, 2009). Indeed, the manipulations seem effective in producing rapid state change.Reinerman, Warm, Matthews, and Langheim (2008) showed that a 36-min monotonous simulated drive produced declines in cerebral blood flow velocity (CBFV) indicative of loss of alertness.
The present study also focused only on task-induced fatigue. Sleepiness and the effects of circadian rhythms may present more severe threats to safety (Williamson et al., 2011). It is important to investigate further the role of fatigue from sources other than driving itself. Effects of task-induced fatigue may interact with sleepiness (May & Baldwin, 2009), so that it may be important to differentiate active and passive fatigue in relation to sleep and circadian processes.
Another issue is that Study 2 investigated aftereffects of the fatigue inductions during the supplementary drive, rather than measuring performance change during the induction itself. A reviewer of an earlier draft of this article made the plausible suggestion that the supplementary drive might itself influence fatigue state. In fact, comparison of Figures 1 and 6 suggests that loss of engagement after 30 min was of similar magnitude in both studies. Averaging across conditions, mean postdrive engagement at 30 min was −.30 in Study 1 and −.35 in Study 2; the emergency event did not seem to raise engagement. By contrast, the lack of effect of fatigue condition on distress in Study 1 might be attributed to the emergency event. In general, though, the states experienced by drivers during the emergency event correspond to those experienced at the end of the fatigue induction. However, performance monitoring during the fatigue induction would add to understanding of safety impacts. Future studies might use a secondary detection or memory task to assess attention during the induction period, or monitor alertness using psychophysiological indices (Craig & Tran, 2012; Reinerman et al., 2008).
Finally, the current methodology provides a snapshot of driver state in various task conditions. It allows systematic investigation of workload and duration factors in driver fatigue, but questions remain about the generalization of results. Driver fatigue “in the wild” may not conform in simple fashion to one or other of the prototypical fatigue states defined here. Similarly, while active and passive fatigue can be operationalized as manipulations, following the Desmond and Hancock (2001) definitions, they do not necessarily constitute discrete psychological states. Further exploration of fatigue states and their performance consequences is needed to determine whether fatigue states correspond to discrete, qualitatively different adaptive modes, or to a continuous multidimensional space representing combinations of the different adaptive strategies varying in graded fashion.
Footnotes
Portions of the data have been previously published in two conference proceedings articles (Saxby, Matthews, Hitchcock, & Warm, 2007; Saxby et al., 2008). The samples used in the analyses reported by Saxby et al. (2007, 2008) are identical to those used for the present analyses. Note that for the current article we calculated workload scores to fall along a 0–10 scale, rather than the 0–60 scale used by Saxby et al. (2007). No other changes were made to the measures analyzed by Saxby et al. (2007, 2008).
The findings and conclusions in this report are those of the author(s) and do not necessarily represent the views of the National Institute for Occupational Safety and Health.
Contributor Information
Dyani J. Saxby, Department of Psychology, University of Cincinnati
Gerald Matthews, Institute for Simulation and Training, University of Central Florida.
Joel S. Warm, Air Force Research Laboratory, Wright-Patterson AFB, Ohio and Human Factors Group, University of Dayton Research Institute
Edward M. Hitchcock, National Institute of Occupational Safety and Health, Cincinnati, Ohio
Catherine Neubauer, Department of Psychology, University of Cincinnati.
References
- Ackerman PL. 100 years without resting. In: Ackerman PL, editor. Cognitive fatigue: The current status and future for research and application. American Psychological Association; Washington, DC: 2011. pp. 11–43. [Google Scholar]
- Becic E, Dell GS, Bock K, Garnsey SM, Kubose T, Kramer A. Driving impairs talking. Psychonomic Bulletin & Review. 2010;17:15–21. doi: 10.3758/PBR.17.1.15. [DOI] [PubMed] [Google Scholar]
- Belz SM, Robinson GS, Casali JG. Temporal separation and self-rating of alertness as indicators of driver fatigue in commercial motor vehicle operators. Human Factors. 2004;46:154–169. doi: 10.1518/hfes.46.1.154.30393. [DOI] [PubMed] [Google Scholar]
- Brookhuis KA, De Waard DD, Fairclough SH. Criteria for driver impairment. Ergonomics. 2003;46:433–445. doi: 10.1080/001401302/1000039556. [DOI] [PubMed] [Google Scholar]
- Brown I. Coping with driver fatigue: Is the long journey nearly over? In: Hancock PA, Desmond PA, editors. Stress, workload, and fatigue. Erlbaum; Mahwah, NJ: 2001. pp. 596–606. [Google Scholar]
- Cottrell ND, Barton BK. The role of automation in reducing stress and negative affect while driving. Theoretical Issues in Ergonomics Science. 2013;14:53–68. doi: 10.1080/1464536X2011.573011. [DOI] [Google Scholar]
- Craig A, Tran Y. The influence of fatigue on brain activity. In: Matthews G, Desmond PA, Neubauer C, Hancock PA, editors. Handbook of operator fatigue. Ashgate Press; Aldershot, UK: 2012. pp. 185–196. [Google Scholar]
- De Muth JE. Basic statistics and pharmaceutical statistical applications. Taylor and Francis Group; Boca Raton, FL: 2006. [Google Scholar]
- Desmond PA, Hancock PA. Active and passive fatigue states. In: Hancock PA, Desmond PA, editors. Stress, workload, and fatigue. Erlbaum; Mahwah, NJ: 2001. pp. 455–465. [Google Scholar]
- Desmond PA, Hancock PA, Monette JL. Fatigue and automation induced impairments in simulated driving performance. Transportation Research Record. 1998;1628:8–14. doi: 10.3141/1628-02. [DOI] [Google Scholar]
- Desmond PA, Matthews G. Individual differences in stress and fatigue in two field studies of driving. Transportation Research Part F: Traffic Psychology and Behaviour. 2009;12:265–276. doi: 10.1016/j.trf.2008.12.006. [DOI] [Google Scholar]
- Endler NS, Parker JD. Multidimensional assessment of coping: A critical review. Journal of Personality and Social Psychology. 1990;58:844–854. doi: 10.1037/0022-3514.58.5.844. [DOI] [PubMed] [Google Scholar]
- Eysenck MW, Derakshan N. New perspectives in attentional control theory. Personality and Individual Differences. 2011;50:955–960. doi: 10.1016/j.paid.2010.08.019. [DOI] [Google Scholar]
- Fairclough SH. Mental effort regulation and the functional impairment of the driver. In: Hancock PA, Desmond PA, editors. Stress, workload, and fatigue. Erlbaum; Mahwah, NJ: 2001. pp. 479–502. [Google Scholar]
- Ferguson E, Matthews G, Cox T. The Appraisal of Life Events (ALE) Scale: Reliability and validity. British Journal of Health Psychology. 1999;4:97–116. doi: 10.1348/135910799168506. [DOI] [Google Scholar]
- Feyer AM, Williamson AM. Broadening our view of effective solutions to commercial driver fatigue. In: Hancock PA, Desmond PA, editors. Stress, workload, and fatigue. Erlbaum; Mahwah, NJ: 2001. pp. 550–565. [Google Scholar]
- Funke G, Matthews G, Warm JS, Emo AK. Vehicle automation: A remedy for driver stress? Ergonomics. 2007;50:1302–1323. doi: 10.1080/00140130701318830. [DOI] [PubMed] [Google Scholar]
- Gershon P, Ronen A, Oron-Gilad T, Shinar D. The effects of an interactive cognitive task (ICT) in suppressing fatigue symptoms in driving. Transportation Research Part F: Traffic Psychology and Behaviour. 2009;12:21–28. doi: 10.1016/j.trf.2008.06.004. [DOI] [Google Scholar]
- Hancock PA, Warm JS. A dynamic model of stress and sustained attention. Human Factors. 1989;31:519–537. doi: 10.1177/001872088903100503. [DOI] [PubMed] [Google Scholar]
- Hart SG, Staveland LE. Development of NASA-TLX (task load index): Results of empirical and theoretical research. In: Hancock PA, Meshkati N, editors. Human mental workload. Elsevier; Amsterdam, The Netherlands: 1988. pp. 139–181. [Google Scholar]
- Hartley LR. Fatigue and driving. In: Rothengatter T, Huguenin RD, editors. Traffic and transport psychology: Theory and application. Elsevier; Oxford, UK: 2004. pp. 221–229. [Google Scholar]
- Hockey GRJ. Compensatory control in the regulation of human performance under stress and high workload: A cognitive-energetical framework. Biological Psychology. 1997;45:73–93. doi: 10.1016/S0301-0511(96)05223-4. [DOI] [PubMed] [Google Scholar]
- Hockey GRJ. A motivational control theory of cognitive fatigue. In: Ackerman PL, editor. Cognitive fatigue: The current status and future for research and applications. APA; Washington, DC: 2011. pp. 167–187. [DOI] [Google Scholar]
- Hockey GRJ. Challenges in fatigue and performance research. In: Matthews G, Desmond PA, Neubauer C, Hancock PA, editors. Handbook of operator fatigue. Ashgate Press; Aldershot, UK: 2012. pp. 45–60. [Google Scholar]
- Ingre M, Åkerstedt T, Peters B, Anund A, Kecklund G. Subjective sleepiness, simulated driving performance and blink duration: Examining individual differences. Journal of Sleep Research. 2006;15:47–53. doi: 10.1111/j.1365-2869.2006.00504.x. [DOI] [PubMed] [Google Scholar]
- Klee H, Radwan E. Assessment of the use of a driving simulator for traffic engineering studies. 2004 Retrieved from http://www.dot.state.fl.us/research-center/Completed_Proj/Summary_TE/FDOT_BC096_18.pdf.
- Lazarus RS. Stress and emotion: A new synthesis. Springer; New York, NY: 1999. [Google Scholar]
- Lee JD. Driving safety. In: Nickerson RS, editor. Reviews of human factors and ergonomics. Human Factors and Ergonomics Society; Santa Monica, CA: 2006. pp. 172–218. [Google Scholar]
- Ma R, Kaber DB. Situation awareness and workload in driving while using adaptive cruise control and a cell phone. International Journal of Industrial Ergonomics. 2005;35:939–953. doi: 10.1016/j.ergon.2005.04.002. [DOI] [Google Scholar]
- Maher-Edwards L, Fernie BA, Murphy G, Wells A, Spada MM. Metacognitions and negative emotions as predictors of symptom severity in chronic fatigue syndrome. Journal of Psychosomatic Research. 2011;70:311–317. doi: 10.1016/j.jpsychores.2010.09.016. [DOI] [PubMed] [Google Scholar]
- Matthews G. Levels of transaction: A cognitive science framework for operator stress. In: Hancock PA, Desmond PA, editors. Stress, workload and fatigue. Erlbaum; Mahwah, NJ: 2001. pp. 5–33. [Google Scholar]
- Matthews G. Towards a transactional ergonomics for driver stress and fatigue. Theoretical Issues in Ergonomics Science. 2002;3:195–211. doi: 10.1080/14639220210124120. [DOI] [Google Scholar]
- Matthews G, Campbell SE. Task-induced stress and individual differences in coping. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 1998;42:821–825. doi: 10.1177/154193129804201111. [DOI] [Google Scholar]
- Matthews G, Campbell SE. Sustained performance under overload: Personality and individual differences in stress and coping. Theoretical Issues in Ergonomics Science. 2009;10:417–442. doi: 10.1080/14639220903106395. [DOI] [Google Scholar]
- Matthews G, Campbell SE. Dynamic relationships between stress states and working memory. Cognition and Emotion. 2010;24:357–373. doi: 10.1080/02699930903378719. [DOI] [Google Scholar]
- Matthews G, Campbell S, Falconer S, Joyner L, Huggins J, Gilliland K, Warm J. Fundamental dimensions of subjective state in performance settings: Task engagement, distress, and worry. Emotion. 2002;2:315–340. doi: 10.1037/1528-3542.2.4.315. [DOI] [PubMed] [Google Scholar]
- Matthews G, Davies D, Westerman S, Stammers R. Human performance: Cognition, stress and individual differences. Psychology Press; Hove, Sussex, UK: 2000. [Google Scholar]
- Matthews G, Desmond A. Task-induced fatigue states and simulated driving performance. The Quarterly Journal of Experimental Psychology, A: Human Experimental Psychology. 2002;55:659–686. doi: 10.1080/02724980143000505. [DOI] [PubMed] [Google Scholar]
- Matthews G, Desmond PA, Hitchcock EM. Dimensional models of fatigue. In: Matthews G, Desmond PA, Neubauer C, Hancock PA, editors. Handbook of operator fatigue. Ashgate Press; Aldershot, UK: 2012. pp. 139–154. [Google Scholar]
- Matthews G, Saxby DJ, Funke GJ, Emo AK, Desmond PA. Driving in states of fatigue or stress. In: Fisher D, Rizzo M, Caird J, Lee J, editors. Handbook of driving simulation for engineering, medicine and psychology. Taylor and Francis; Boca Raton, FL: 2011. pp. 29-1–11–29. [DOI] [Google Scholar]
- Matthews G, Sparkes TJ, Bygrave HM. Stress, attentional overload and simulated driving performance. Human Performance. 1996;9:77–101. doi: 10.1207/s15327043hup0901_5. [DOI] [Google Scholar]
- Matthews G, Szalma J, Panganiban AR, Neubauer C, Warm JS. Profiling task stress with the Dundee Stress State Questionnaire. In: Cavalcanti L, Azevedo S, editors. Psychology of stress: New research. Nova Science; Hauppage, NY: 2013. pp. 49–92. [Google Scholar]
- Matthews G, Warm JS, Reinerman LE, Langheim LK, Saxby DJ. Task engagement, attention and executive control. In: Gruszka A, Matthews G, Szymura B, editors. Handbook of individual differences in cognition: Attention, memory and executive control. Springer; New York, NY: 2010. pp. 205–230. [DOI] [Google Scholar]
- Matthews G, Warm JS, Reinerman LE, Langheim L, Washburn DA, Tripp L. Task engagement, cerebral blood flow velocity, and diagnostic monitoring for sustained attention. Journal of Experimental Psychology: Applied. 2010;16:187–203. doi: 10.1037/a0019572. [DOI] [PubMed] [Google Scholar]
- Matthews G, Zeidner M. Individual differences in attentional networks: Trait and state correlates of the ANT. Personality and Individual Differences. 2012;53:574–579. doi: 10.1016/j.paid.2012.04.034. [DOI] [Google Scholar]
- May JF, Baldwin CL. Driver fatigue: The importance of identifying causal factors of fatigue when considering detection and countermeasure technologies. Transportation Research Part F: Traffic Psychology and Behaviour. 2009;12:218–224. doi: 10.1016/j.trf.2008.11.005. [DOI] [Google Scholar]
- Morrow PC, Crum MR. Antecedents of fatigue, close calls, and crashes among commercial motor-vehicle drivers. Journal of Safety Research. 2004;35:59–69. doi: 10.1016/j.jsr.2003.07.004. [DOI] [PubMed] [Google Scholar]
- Neubauer CE, Matthews G, Saxby DJ. Driver fatigue and safety: A transactional perspective. In: Matthews G, Desmond PA, Neubauer C, Hancock PA, editors. Handbook of operator fatigue. Ashgate Press; Aldershot, UK: 2012. pp. 365–377. [Google Scholar]
- Oron-Gilad T, Hancock PA. Road environment and driver fatigue. In: Rizzo M, Lee JD, McGehee DV, editors. Proceedings of the Third Driving Assessment Symposium. University of Iowa Public Policy Center; Iowa City, IA: 2005. pp. 318–324. [Google Scholar]
- Oron-Gilad T, Ronen A. Road characteristics and driver fatigue: A simulator study. Traffic Injury Prevention. 2007;8:281–289. doi: 10.1080/15389580701354318. [DOI] [PubMed] [Google Scholar]
- Philip P, Sagaspe P, Moore N, Taillard J, Charles A, Guilleminault C, Bioulac B. Fatigue, sleep restriction and driving performance. Accident Analysis & Prevention. 2005;37:473–478. doi: 10.1016/j.aap.2004.07.007. [DOI] [PubMed] [Google Scholar]
- Reinerman LE, Warm JS, Matthews G, Langheim LK. Cerebral blood flow velocity and subjective state as indices of resource utilization during sustained driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 2008;52:1252–1256. doi: 10.1177/154193120805201821. [DOI] [Google Scholar]
- Road Safety Rural crashes. 2005 Retrieved from http://www.transport.sa.gov.au/rss/content/safer_people/issues/rural_crashes.htm.
- Rosenthal TJ, Allen RW, Christos JP, Aphonso BL. A driving simulator for testing the visibility and conspicuity of highway designs and traffic control design placement. Proceedings of the 16th Biennial Symposium on Visibility and Simulation; Washington, DC. Transportation Research Board; 2004. [Google Scholar]
- Sauer J, Kao C, Wastell D. A comparison of adaptive and adaptable automation under different levels of environmental stress. Ergonomics. 2012;55:840–853. doi: 10.1080/00140139.2012.676673. [DOI] [PubMed] [Google Scholar]
- Saxby DJ, Matthews G, Hitchcock EM, Warm JS. Development of active and passive fatigue manipulations using a driving simulator. Proceedings of the Human Factors and Ergonomics Society Annual Meeting.2007. pp. 1237–1241. [Google Scholar]
- Saxby DJ, Matthews G, Hitchcock EM, Warm JS, Funke GJ, Gantzer T. Effects of active and passive fatigue on performance using a driving simulator. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 2008;52:1252–1256. [Google Scholar]
- Szalma JL, Hancock PA. Task loading and stress in human-computer interaction: Theoretical frameworks and mitigation strategies. In: Jacko JA, Sears A, editors. Handbook for human–computer interaction in interactive systems. 2nd Erlbaum; New York, NY: 2008. pp. 115–132. [Google Scholar]
- Szalma JL, Warm JS, Matthews G, Dember WN, Wiler EM, Meier A, Eggemeier T. Effects of sensory modality and task duration on performance, workload, and stress in sustained attention. Human Factors. 2004;46:219–233. doi: 10.1518/hfes.46.2.219.37334. [DOI] [PubMed] [Google Scholar]
- Thiffault P, Bergeron J. Monotony of road environment and driver fatigue: A simulator study. Accident Analysis and Prevention. 2003;35:381–391. doi: 10.1016/S0001-4575(02)00014-3. [DOI] [PubMed] [Google Scholar]
- Tvaryanas AP, MacPherson GD. Fatigue in pilots of remotely piloted aircraft before and after shift work adjustment. Aviation, Space, and Environmental Medicine. 2009;80:454–461. doi: 10.3357/ASEM.2455.2009. [DOI] [PubMed] [Google Scholar]
- VicRoads Active and passive safety features. 2007 Retrieved from http://www.vicroads.vic.gov.au/Home/RoadSafety/BuyingASafeCar/ActiveandPassiveSafetyFeatures.htm.
- Warm JS, Parasuraman R, Matthews G. Vigilance requires hard mental work and is stressful. Human Factors. 2008;50:433–441. doi: 10.1518/001872008X312152. [DOI] [PubMed] [Google Scholar]
- Wijesuriya N, Tran Y, Craig A. The psychophysiological determinants of fatigue. International Journal of Psychophysiology. 2007;63:77–86. doi: 10.1016/j.ijpsycho.2006.08.005. [DOI] [PubMed] [Google Scholar]
- Williamson A, Lombardi DA, Folkard S, Stutts J, Courtney TK, Connor JL. The link between fatigue and safety. Accident Analysis and Prevention. 2011;43:498–515. doi: 10.1016/j.aap.2009.11.011. [DOI] [PubMed] [Google Scholar]
- Young MS, Stanton NA. Taking the load off: Investigations of how adaptive cruise control affects mental workload. Ergonomics. 2004;47:1014–1035. doi: 10.1080/00140130410001686348. [DOI] [PubMed] [Google Scholar]
- Young MS, Stanton NA. Back to the future: Brake reaction times for manual and automated vehicles. Ergonomics. 2007;50:46–58. doi: 10.1080/00140130600980789. [DOI] [PubMed] [Google Scholar]
- Zesiewicz TA, Cimino CR, Malek AR, Gardner N, Leaverton PL, Dunne PB, Hauser RA. Driving safety in Parkinson’s disease. Neurology. 2002;59:1787–1788. doi: 10.1212/01.WNL.0000035636.83680.C6. [DOI] [PubMed] [Google Scholar]