

Abstract
Land use regression (LUR) models rely on air pollutant measurements for their development, and are therefore limited to recent periods where such measurements are available. Here we propose an approach to overcome this gap and calculate LUR models several decades before measurements were available. We first developed a LUR model for NOx using annual averages of NOx at all available air quality monitoring sites in Israel between 1991 and 2011 with time as one of the independent variables. We then reconstructed historical spatial data (e.g., road network) from historical topographic maps to apply the model’s prediction to each year from 1961 to 2011. The model’s predictions were then validated against independent estimates about the national annual NOx emissions from on-road vehicles in a top-down approach. The model’s cross validated R2 was 0.74, and the correlation between the model’s annual averages and the national annual NOx emissions between 1965 and 2011 was 0.75.
Information about the road network and population are persistent predictors in many LUR models. The use of available historical data about these predictors to resolve the spatial variability of air pollutants together with complementary national estimates on the change in pollution levels over time enable historical reconstruction of exposures.
Graphical Abstract
INTRODUCTION
Cohort studies relating past exposure levels to traffic related air pollution (TRAP) with present health outcomes require information about historic pollution levels.1,2 However, in the absence of direct measurements of air pollutants from earlier decades, predicting past exposure levels has many uncertainties that cannot be resolved. A major unknown is the change in vehicle emissions over time. These may change as a function of different engine and exhaust technologies (e.g., introduction of catalytic converter), maintenance level of the vehicles, different gasoline used and even the maintenance level of the road network. Another source of uncertainty is the change over time in total mileage traveled which is related to population size, the number of vehicles per capita, fuel costs, family income, intervention measures3 and other factors4.
Other studies have shown a decrease in vehicle emissions of NOx in the USA5–7, while in Europe a mix of trends was observed (see Supporting Information for more details). For Israel, the kilometers traveled per year increased from 5,892 million km year−1 in 1970 to 50,693 in 2010. This increase is in part attributable to the increase in the total population of Israel from 2.2 million in 1961 to 7.8 million in 2011 and in the number of vehicles from 0.08 to 2.7 million vehicles over the same period (Figure S1a, Supporting Information). And yet, more recent model vehicles have better air pollution controls, which sharply reduce TRAP emissions. As these two trends counter each other, it is difficult to provide an accurate prediction about the resulting ambient pollution levels.
One approach to estimate past exposure levels is to extrapolate land use regression (LUR) model predictions to earlier decades. In these models, the measured levels of air pollution at multiple measuring sites are taken as the dependent variable and regressed in a multivariable model on independent variables such as road network, traffic density, population size, land cover, etc.8,9 LUR models have been used in many studies mainly because they are relatively easy to develop and can resolve intra-urban variability in TRAP. They are limited, however, in their temporal resolution as they rely on long term averages of pollution levels.
Back-extrapolation of LUR models is, however, a challenging task, because of the scarcity and lower reliability of past measurements and the fact that many assumptions embodied in current day models are not valid for earlier periods. For example, the correlations found between population density and pollution levels stem, in part, from the number of vehicles per household and the availability of public transport, both of which are likely to change over time. Furthermore, both pollutant mix and emission rates from vehicles have changed as vehicle technology and fuels improved over time, so that correlations between traffic load and pollution levels have also varied accordingly.
Few studies have attempted to back-extrapolate LUR models. Eeftens et al.10 tested a model’s stability over time by comparing two sets of NO2 measurements at the same locations eight years apart, one for 1999–2000 and one for 2008. They found good agreement in the spatial patterns over that time period. Wang et al.11 have also tested the stability of LUR models for NO and NO2 over a seven year period for Metropolitan Vancouver, Canada. They found that the models provided a reliable estimate over that time frame. Chen et al.1 presented three methods for back-extrapolation of a LUR model from 2005–2006 to 10 and 20 years back by multiplying the present day LUR prediction by the ratio of past-to-present measured NO2 levels at available monitoring sites. In another study, Gulliver et al.2 back-extrapolated NO2 levels over all of Great Britain from LUR models developed for 2009 and 2001 to 1991. The back-extrapolation was based on available measurements at 5 monitoring sites that operated at the three time periods.
All four above-mentioned studies used air pollution measurements in earlier periods and the ratios of past-to-present pollution levels. In many locations such measurements are not available or are unreliable. Moreover, this approach does not account for changes in the physical environment within the study domain such as new roads. A different approach is therefore needed for back-extrapolating exposures that can be applied instead of direct measurements.
Here we present an alternative method for back-extrapolating LUR models. We first apply a 21 year long record (1991–2011) of air quality monitoring network (AQMN) data in Israel to develop a LUR model for traffic related NOx (NOx ≡ NO+NO2) over the entire country with time as one of the predictors. We then apply the model for each year between 1961–2011 using geographical information system (GIS)-based predictors reconstructed for each decade between the 1960s and 2000s and interpolated for each year separately. The model’s predictions are then evaluated against independent estimates of national NOx emissions from on-road vehicles calculated from data about the vehicle fleet composition and mileage traveled in each year and the relevant emission factors by car type and age.
METHODOLOGY
Study region
The study region includes an area of 14,000 km2 covering most of the populated areas of Israel (Figure S2, Supporting Information), encompassing a population of 7.84 million in 201112. Major emission sources include traffic and industry, as well as several power plants shown in Figure S2b. During the study period (1961–2011) the population increased from 2,234,000 to 7,836,600 and the number of cars increased from 80,000 to 2,683,00012 (Figure S1a).
Air quality data
Ambient air pollution measurements in Israel are performed routinely by the National Air Quality Monitoring Center at the Israel Ministry of Environmental Protection, several Municipal Associations for Environmental Protection and the Israel Electric Corporation, together including over 100 sites. The first air quality measurements in Israel started in 1969 around the Reading Power Plant in Tel Aviv.13 Continuous measurements began in 1975 in and around towns neighboring the power plants along the coast. However these monitors were not consistent between the different operating organizations in terms of their instrumentation and were unreliable in terms of data availability.13 More consistent NOx measurements started in 1991 and continue to the present. The number of air quality (AQ) sites changed from year to year and by pollutant measured. Figure S1b shows the number of sites measuring NOx at each year with more than 75% data availability per year, together comprising 765 annual averages from 104 sites. Basic statistics for each year (1991–2011) are provided in Table S1.
The LUR model was developed for NOx rather than NO2 that is usually modeled in other studies2,14 the main reason being that NOx includes NO and therefore accounts for both near-road (mainly NO) and off-road (mainly NO2) concentrations. Furthermore, NOx has been shown to correlate better than NO2 with other traffic-related air pollutants, when using on-road measurements15,16. Last, there were more monitoring sites reporting NOx than NO2 in the 1990’s in Israel.
For the period of 1997–2011, annual averages of NOx and percent availability of each site were extracted from the Technion Center of Excellence in Exposure Science and Environmental Health (TCEEH) Air Pollution Monitoring Database of all air quality monitoring sites after being quality assured. Earlier measurements were taken from archived annual reports of all the relevant monitoring agencies.
Geo-location data including latitude, longitude, elevation above sea level and air sample inlet elevation above street level were collected for each monitoring site. The location data underwent quality assurance by either GPS or Google Street View improving the accuracy of site locations and changes in location over time (location of some of the monitoring station was changed over the years). Only sites with more than 75% data available for a specific year were included in the analysis.
Generation of spatial variables
In order to model past exposures, only variables that were available for past decades were included. Consequently, we developed and reconstructed historical GIS data on a national scale at decade intervals since the 1960s. We scanned and geo-referenced 1:50,000 topographic maps and major city maps of Israel since the 1960s onwards, using maps from the Map Library of the Hebrew University of Jerusalem in Mt. Scopus. In addition, we collated satellite imagery (Corona and Landsat, courtesy of the U.S. Geological Survey) since the 1960s. These databases enabled us to identify and digitize changes in the built-up areas, road network and population distribution of Israel in past decades, following the same methodology as in Levin et al., 2013.17 In addition we constructed a database of annual changes in the traffic volume of Israel’s highways based on samples of vehicle counts (Figure S1c) and in the fleet composition of Israel’s towns and cities from records of Israel’s Central Bureau of Statistics (ICBS) (some of which were available online at http://www.cbs.gov.il, the rest from printed volumes and special issues of the ICBS).
Road network
We used the GIS vector layers of the 2011 road network (GISrael database of MAPA: http://www.gisrael.co.il/eng/) as the base layers upon which we based our reconstruction of past GIS layers of roads in the 1990s, 1980s, 1970s and 1960s (following the same methodology as in Levin et al., 201317). First, the 1990s roads layer was created by overlaying the 2011 road layer on the 1990s topographic and urban maps and modifying the attributes and geometry of each road according to the details of the 1990s maps. For example, a road that existed in 2011 but did not exist in the 1990s was marked as nonexistent in the 1990s layer, etc. This procedure was repeated between all consecutive decades (1980s, 1970s and 1960s). During this process we also determined the class of each road on each decade. All 19 road types (as classified in the GISrael database) were aggregated to three types which can be identified on topographic maps by their symbols (highways, main roads and local roads) and then summed at each buffer distance, for each road type and each decade.
Population density
Population data was based on the ICBS censuses of 2008, 1995, 1983, 1972 and 1961 (e.g., Figure S2a for 2008). As the boundaries of ICBS census tracks have changed with time, we have scanned and georeferenced past maps of the ICBS census units, to reconstruct past GIS layers for each of the ICBS censuses.
Power plants
Distance to the nearest of four major power plants was calculated for each monitoring site. The power plants included are steam-powered and were built along the coast between the 1930’s (in Haifa and Tel Aviv) until the mid-1980’s (Ashkelon and Hadera) and were upgraded over time. They burned fuel oil at first and coal since the 1980’s. Stack heights are up to 265 m.
Land use
Given that many AQMN site locations were selected to reflect either community level pollution or emissions from industry, only two types of land use were extracted: residential and industrial. The development of built-up areas at the scale of neighbourhood polygons was reconstructed in a similar method to that described above for the road network.17
Vegetation cover
We used a series of Landsat-5 satellite images from the US Geological Survey (www.usgs.gov) converted to Normalized Difference Vegetation Index (NDVI) values18 to derive within-pixel proportional woody vegetation, annual vegetation, and bare earth cover values19. NDVI was calculated for 2003, 1998 and 1986/7 images for two seasons, spring and late summer, representing maximum and minimum greenness, respectively. Satellite imagery over Israel was not available in the 1970’s and 1960’s for this purpose. We converted the NDVI values into percent cover (Pv) of green vegetation19. The late summer Pv (minimum Pv) corresponded to the percentage cover of perennial vegetation; the difference between the spring and late summer Pv (maximum and minimum Pv) corresponded to the percentage cover of herbaceous (annual) vegetation; and 100% minus Spring (Maximum) Pv corresponded to the percentage cover of bare soil.
Traffic volumes
Traffic counts for a selected sample of highways and main roads were done routinely by the ICBS since 1970 at an increasing number of roads each year. Each road was sampled over a random two weeks period of each year. These data were used to calculate the median traffic volume for all highways and main roads for each year, following Su et al.20.
Vehicle count
To account for the annual growth in the number of vehicles in the country, data on the number of vehicles in each city, local council and regional council reported by the ICBS since 1970 were collected. The data were normalized by the population size and joined spatially with the location of the monitoring sites.
Type of AQ site
AQ type was included as a categorical variable (i.e., “near-road” or “general”). Since roads in the GIS are represented by lines with no width, there is a potential error when calculating AQ distance to the nearest road. Considering a typical road width of several meters, for near-road AQ sites this can cause a significant error, which could be aggravated by any inaccuracy in the site’s location. Near-road sites in Israel are typically located at the curbside when possible or up to 10 meters from the road.
Altogether, 22 predictors were calculated (in 10 groups), 11 of them were extracted at 28 different radii each (buffers of 50 m to 3000 m around monitoring stations, listed in Table S2, Supporting Information). Predictors calculated at decadal resolution were linearly interpolated to annual resolution for inclusion in the statistical analysis.
Model selection
Our modeling approach was to find the model that will produce the best predicted NOx levels over the entire study domain while assuring that the predictors match apriori knowledge about their effect on TRAP. We therefore were not concerned about collinearity of predictors but did require statistical significance for each. A supervised forward step-wise procedure was used to select the best model21. First, a univariate model was calculated for each predictor against the natural logarithm of NOx, testing for both linear and non-linear effects and using the generalized additive model (GAM, mgcv package in R version 2.15.122) with spline-based smoothing functions, accounting for 3 to 10 dimensions of the smoothing basis k. GAM was shown to perform better than linear regression for TRAP in LUR models.23 The NOx data were positively skewed. A log transformation provided a better fit for the required normality assumption (Figure S3).
The predictor with the highest adjusted R2 and p-value lower than 0.05 was considered, as long as it met a subjective rejection criterion for predictors that do not behave according to a-priori knowledge of the direction of effect. Second, each remaining predictor was tested in turn for its contribution to the model in terms of adjusted-R2 using GAM, again testing both linear and non-linear effects. At this stage only predictors meeting the criteria described above, not belonging to the same group of predictors of an already selected predictor (i.e., the same variable at a different buffer distance, Table S2) and as long as they did not alter the direction of effect of predictors already selected, were included in the model. The second step was repeated until no additional predictor could improve the adjusted-R2 by more than 1%.
We then tested the type of AQ site as a categorical predictor to account for the sharp gradient in pollution near highways and main roads. Time (i.e., year of measurement) was treated identically to all other predictors, though after selecting the predictors they were each tested for interactions with time as it plays an important role in back extrapolating the model’s prediction.
Model application to entire domain
To apply the model to the entire domain, the selected predictors were calculated at each grid cell, with the exception of the elevation above ground level which was implemented at 1.5 m above ground. The type of AQ site predictor was defined as “near-road” when the distance of the grid center point to either a highway or a main road was less than ten meters and “general” otherwise.
Because of the national coverage of the domain and the need to resolve intra-urban variability, a nested grid approach was adopted. All predictors were calculated at a coarse spatial resolution of 200 m over the entire domain (~350,000 grid points) and a finer resolution of 50 m over the residential areas only (~1 million grid points). After calculating the model’s prediction for each grid, the two grids were joined into a final grid of 50 m by assigning every four grid points in the final grid the value of a single 200 m grid point and then overriding these values by the finer grid cell values only over residential areas.
Back-extrapolation
Back-extrapolation of the model was done by calculating each of the selected predictors for both coarse and fine grid cells and for each decade using the census years (1961, 1972, 1983, 1995 and 2008) as the “reference year” for the population density predictor and the mid-year in each decade (1965, 1975, 1985 and 1995) and the original 2011 data for the road network.
The predictors were then interpolated linearly over time for each grid point at each of the two resolutions so as to calculate the predictors for every year between 1961 and 2011. For predictors extending beyond the range of data in the model (e.g., year), the GAM allows for a linear extrapolation of the smoothed predictors. The above procedure was repeated for each year separately, producing 51 NOx surfaces. Error estimation was also calculated for each year using R’s GAM options.
National emissions of NOx from vehicles – the top-down approach
The emissions of NOx from on-road vehicles were calculated on a national scale based on the ICBS records of the vehicle fleet size and composition between 1960–2012, vehicle ages and the distance in kilometers traveled by each vehicle group. A detailed description of the emissions is given in the Supporting Information, along with a discussion about sources of uncertainty and a comparison to other countries.
RESULTS
Model evaluation
Nine predictors were included in the final model at buffer distances ranging from 150 m to 3000 m (Table 1). Since the model was to be applied to the entire Israel domain, special care was given to cases where the predictors had a wider range of values over the entire domain compared to the sample of the AQMN sites. The selected model was therefore tested for providing feasible prediction over the entire domain by a graphical sensitivity test. The minimum and maximum values were calculated for each predictor over the entire domain and the model’s prediction was calculated over that range, while holding the other predictors at their median value (Figure 1).
Table 1.
predictors included in the model:
| Predictor | Buffer (m) | Smoothed/Linear | R2 in univariate model (p-value in final model) |
|---|---|---|---|
| Instruments’ inlet elevation above ground level (m) | NA | S | 0.0681 |
| Year | NA | S | 0.0371 |
| Type of AQ site | NA | L | 0.3621 |
| Distance to highway* | NA | S | 0.1451 |
| Distance to main road | NA | S | 0.2591 |
| Length of all roads | 150 | S | 0.3562 |
| Length of main roads | 800 | L | 0.2841 |
| Length of highways | 1500 | L | 0.1351 |
| Sum of population density | 3000 | L | 0.4051 |
predictor includes interaction with time.
p < 0.001.
p < 0.01
Figure 1.

Sensitivity analysis of the predictors included in the model. Gray shadings denote prediction errors. Ticks at the bottom mark observations included in the model. Boxplots above each panel provide descriptive statistics for that variable.
The buffered variables in Figures 1a–d show an increase in predicted NOx as the road lengths and population increase. Distance to highways and main roads is associated with high concentrations near the roads (up to 10 m) and a decrease with distance away from the roads, as observed in other studies16. The elevation above ground shows a mixed trend of decreasing NOx in the first ten meters and then increasing. However, since the model was applied to a height of 1.5 m above ground (approximately breathing level), the trend above ten meters was less relevant. The change over time is discussed in greater detail in the following section.
The model’s leave-one-out cross validation (CV) adjusted-R2 was 0.74 (p-value ≪ 0.0001), root mean squared error (RMSE) 11.15 ppb and the slope of the CV was 1.01 (95% CI 0.97 to 1.06) (Figure 2 and Table S3). Separating the AQ sites to near-road and general sites in Figure 2 shows that the model successfully predicts NOx levels near roads. There is a significant under estimation for only two measurements, both at an AQ site in downtown Jerusalem with multiple bus routes and busy traffic in 1999 and 2002, both predictors that were unavailable or not included in the model.
Figure 2.
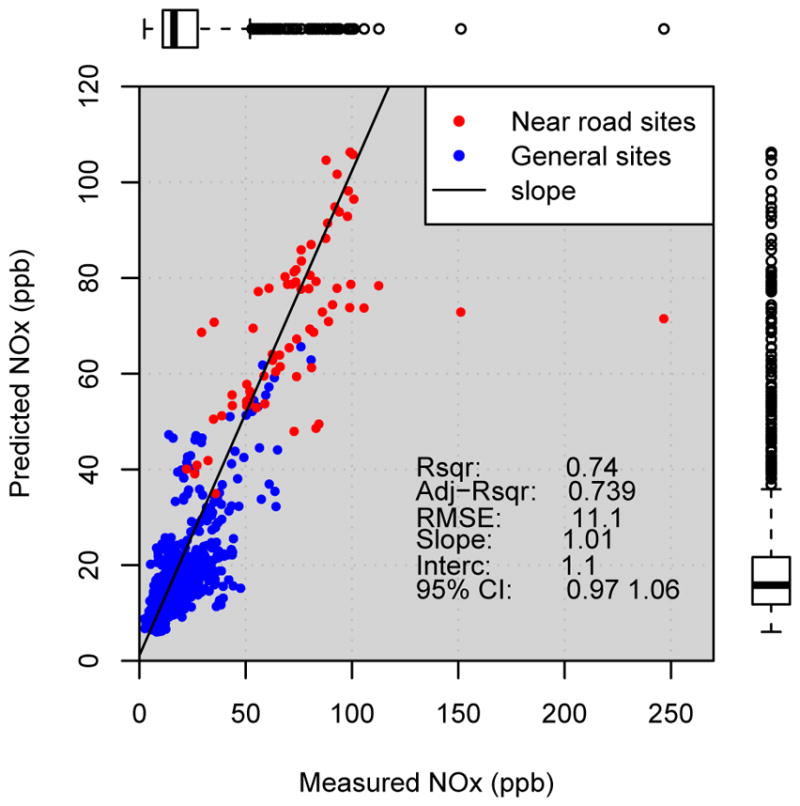
Leave-one-out cross validation of the predicted vs. measured NOx at each site and year. Statistics are for all sites.
Statistical evaluation was also done by a CV stratified by year, where all the samples for a given year were excluded at each iteration. This approach avoids a potential spatial bias in the sample, i.e., when a random subset of measurements includes several sites from the same geographical area which might be correlated. The model’s CV stratified by year, leave-10-out CV and 2012 CV (against the 2012 NOx measurements) yielded very similar results to the leave-one-out cross validation for all parameters (Table S3).
Temporal variations
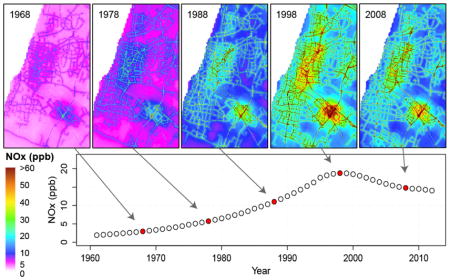
Figure 3a shows a quantitative measure of the change in model predictions as a time series of boxplots calculated over residential areas only (i.e., the 50 m grid) for each year between 1961 and 2011. Prediction error is also given for each year in gray shading. The finer grid is presented as it is more relevant to the national emissions described later. The mean predicted level of NOx is lower for the earlier years (1.9 ppb in 1961) as can be expected from the input data (i.e., fewer roads and a smaller population further back in time) and gradually increases to a maximum of 18.8 ppb in 1998 and then decreases to 14.3 ppb in 2011. The highest values calculated over these areas for each year change accordingly from 23.1 to 227.9 and 164.7 ppb. Figure S4, Supporting Information, shows maps of the model prediction and prediction error for each decade.
Figure 3.

Time series of: a) boxplots of the LUR prediction over residential areas (50 m domain) with the mean of the prediction error over that area (gray shading), as well as weighted LUR prediction according to the national emissions and a smoothing weighted LUR prediction; b) reconstructed national NOx emissions from vehicles; c) annual boxplots of NOx measured at all available AQM sites, mean NOx at near road sites (red) and general sites (blue).
As the modeled pollution levels increase over time between 1961 and 1998, the prediction errors decrease. The mean errors calculated by the model over the residential areas are largest in the earlier years (3.7 ppb in 1961) and gradually decrease over time to 1.1 ppb from 1992 onward. For any given year, the largest errors over the entire domain are for the remote rural parts of the country, distant from roads and population (Figure S4). However, given the sparse population in these regions, this will have a minimal effect on the exposure assessment in relation to studies of health effects.
Model corroboration
To corroborate the model’s predictions in the earlier decades (i.e., 1960s–1980s) for which monitoring data were not available, the national emission estimates of NOx from vehicles were used (Figure 3b). An increase in vehicle emissions is estimated from 1960 to 1995 (from 20.9 to 122.6 Gg NOx/year), followed by a decrease to 49.1 Gg NOx/year in 2010. The increase in emissions up to the late 1990’s is due to the increase in the total number of vehicles (Figure S1a) and mileage traveled. With the improvements in vehicle technology during the 1990’s, and particularly the gradual introduction of the catalytic converter in 1994, the total emissions start to decline. However, due to coarse resolution of the emissions data in these years (every 5 years), it is not possible to point to the year with highest emissions.
This behavior in the national vehicle emissions of NOx is not unusual and was observed in other countries as well (Figure S5). A similar temporal trend was reported for traffic-related lead pollution from the coastal plain of Israel, reaching its highest levels around 1990, before the phasing out of leaded petrol in Israel.24
Examining whether ambient pollution levels reflect national emissions, the time series of estimated national emissions was correlated with the annual averages of NOx at all available monitoring sites as well as near-road sites and general sites, separately, between 1991 and 2011 (shown in Figure 3c). Good agreement was found with all sites (Figure 4a) with Pearson’s correlation coefficient of 0.87, and also when the sites were separated to general and near-road (r = 0.89 and 0.85, respectively).
Figure 4.

Scatter plot of national emissions of NOx against (a) the annual mean NOx as measured by all AQMN sites (empty circles), general sites (blue) and near-road sites (red); (b) the mean of model predicted NOx over the residential areas. Lines represent the linear correlations.
Considering the fact that these are two separate metrics of air pollution levels (i.e., emissions vs. ambient concentrations), the good correlation between them and the general agreement in temporal behavior in Figure 3 demonstrate the relevance of the calculated national NOx emissions from vehicles as a proxy for the changes in ambient levels over time. We therefore used the latter time series to corroborate the model’s prediction for the earlier years. A Pearson correlation coefficient of r = 0.75 was found between the model’s mean NOx over the populated regions and the national emissions (Figure 4b).
DISCUSSION
In this paper we propose an alternative approach for back-extrapolating LUR models to past years that is not based on direct measurements taken in earlier periods. We first developed a LUR model with time as one of the predictors and apply the model to reconstructed predictors between 1961 and 2011. We then support the model’s predictions by correlating it against independent estimates about the total annual emissions of NOx from the national fleet of on road vehicles. Our results demonstrate how the use of reconstructed historical data about road network and population together with complementary data about the change in pollution levels over time in a top-down approach is a viable approach for reconstructing historic exposures.
It should be noted that the model’s ability to predict the change in the trend of vehicles emissions in the 1990’s was only possible because some AQMN measurements were available in the early 1990’s, before the change in the national emissions trend. Had the change in trend occurred in the 1980’s or earlier (as happened in European countries such as Germany, France and the United Kingdom, Figure S5), our approach would necessarily have been different. One possible way to reconstruct spatial patterns of historic exposure levels and their temporal trends is to apply the model’s prediction to the historic predictors so as to obtain the spatial patterns of pollution levels at any period in time and then give weights to each year according to the reconstructed national emissions derived from a top-down approach. Such weights could be, for example, the ratio of past to present national emissions. In Figure 3a we demonstrate this by applying a correction factor to each year from the calculated national emissions. The weights were calculated by applying the slope and intercept of the linear regression between the national NOx emissions and the mean LUR prediction (Figure 4b) to the mean LUR prediction so as to obtain the “weighted LUR”. We then spline smoothed over the entire period (1960–2011) to obtain individual annual weights (Figure 3a).
When evaluating the model’s prediction, two separate aspects should be considered – spatial pattern and magnitude. With respect to the spatial pattern, it is likely that the relations found between present-day predictors (i.e., roads and population) and pollution levels were different in earlier decades. As described in the Introduction, this is mainly due to the changes in technology and population. Nevertheless, it is reasonable to expect that the model’s prediction is valid, or at least the best estimate that can be derived, being based on the reconstructed road network and census data of the relevant decades. These two factors have been shown repeatedly to be correlated with TRAP.11,25 As for the absolute levels of NOx predicted by the model, the agreement between calculated national emissions from vehicles and the ambient pollution levels measured by the AQMN for recent years on the one hand, and national emissions and the model prediction over the populated parts of the country on the other hand, lends confidence that the prediction for past decades is indeed proportional to actual levels experienced by the population.
As opposed to the approach taken by some studies that back-extrapolated LUR models based on available measurements in earlier years1,2,10,11,26, the method presented here allows reconstructing exposure estimates in earlier periods for which measurements are not available. Furthermore, when compared to the method presented by Chen et al.1 which is based on multiplying the LUR prediction by the ratio of past to present pollution levels at few monitoring sites, our method can account for physical changes in the environment such as construction of new roads and highways, expansion of populated areas or changes in green spaces within cities. However, a limitation of our approach is the high cost associated with reconstructing historic GIS data. The substantial effort required is a function of the size of the region/country under study, the extent of change over time (in particular of urban development) and the breadth of the historical period of reconstruction.
One advantage of LUR models over other types of models (i.e., numerical and dispersion models) for estimating exposures is that they do not require detailed knowledge of the emission sources with accurate emission rates. Instead, they rely on the statistical correlations between physical features in the environment and ambient pollution levels. Our results demonstrate how this advantage can be further exploited by applying a LUR model to historical data about the environment to predict past exposures which can be used as metrics in longitudinal health studies.
Supplementary Material
Acknowledgments
This work was supported by the Environment and Health Fund (Israel) Grant Award no. RGA 1002. The authors would like to thank Prof. Barak Fishbain from the Faculty of Civil and Environmental Engineering, Technion – Israel Institute of Technology for providing the computational power needed for the analysis. We also thank Prof. Ronit Nirel from the Department of Statistics at the Hebrew University of Jerusalem and Prof. Ayala Cohen from the Industrial and Management Engineering Department, Technion, Israel Institute of Technology for their advice on the statistical model.
Footnotes
ASSOCIATED CONTENT: Supporting information includes a brief discussion of national NOx emissions from on-road vehicles, a table with descriptive statistics for NOx (ppb) at all available AQMN sites by year (Table S1), a table of predictors tested for the model (Table S2), a figure with time series describing the increase in population, vehicles, number of monitoring sites and mileage traveled since the 1960’s (Figure S1), maps of the study region (Figure S2), histograms of the annual averaged and log transformed NOx levels (Figure S3), maps of model predictions and errors for selected years (Figure S4) and a time series of national NOx emissions from vehicles at selected European countries (Figure S5). This material is available free of charge via the Internet at http://pubs.acs.org.
References
- 1.Chen H, Goldberg MS, Crouse DL, Burnett RT, Jerrett M, Villeneuve PJ, Wheeler AJ, Labrèche F, Ross NA. Back-extrapolation of estimates of exposure from current land-use regression models. Atmospheric Environment. 2010;44:4346–4354. [Google Scholar]
- 2.Gulliver J, de Hoogh K, Hansell A, Vienneau D. Development and Back-Extrapolation of NO2 Land Use Regression Models for Historic Exposure Assessment in Great Britain. Environ Sci Technol. 2013;47:7804–7811. doi: 10.1021/es4008849. [DOI] [PubMed] [Google Scholar]
- 3.Cesaroni G, Boogaard H, Jonkers S, Porta D, Badaloni C, Cattani G, Forastiere F, Hoek G. Health benefits of traffic-related air pollution reduction in different socioeconomic groups: the effect of low-emission zoning in Rome. Occupational and Environmental Medicine. 2012;69:133–139. doi: 10.1136/oem.2010.063750. [DOI] [PubMed] [Google Scholar]
- 4.Small KA, Van Dender K. Fuel efficiency and motor vehicle travel: the declining rebound effect. The Energy Journal. 2007:25–51. [Google Scholar]
- 5.Parrish DD. Critical evaluation of US on-road vehicle emission inventories. Atmospheric Environment. 2006;40:2288–2300. [Google Scholar]
- 6.Dallmann TR, Harley RA. Evaluation of mobile source emission trends in the United States. Journal of Geophysical Research: Atmospheres. 2010;115 n/a–n/a. [Google Scholar]
- 7.McDonald BC, Gentner DR, Goldstein AH, Harley RA. Long-Term Trends in Motor Vehicle Emissions in U.S. Urban Areas. Environ Sci Technol. 2013;47:10022–10031. doi: 10.1021/es401034z. [DOI] [PubMed] [Google Scholar]
- 8.Gilliland F, Avol E, Kinney P, Jerrett M, Dvonch T, Lurmann F, Buckley T, Breysse P, Keeler G, de Villiers T, et al. Air pollution exposure assessment for epidemiologic studies of pregnant women and children: lessons learned from the Centers for Children’s Environmental Health and Disease Prevention Research. Environ Health Perspect. 2005;113:1447–1454. doi: 10.1289/ehp.7673. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Ryan PH, LeMasters GK. A Review of Land-use Regression Models for Characterizing Intraurban Air Pollution Exposure. Inhal Toxicol. 2007;19:127–133. doi: 10.1080/08958370701495998. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 10.Eeftens M, Beelen R, Fischer P, Brunekreef B, Meliefste K, Hoek G. Stability of measured and modelled spatial contrasts in NO2 over time. Occup Environ Med. 2011;68:765–770. doi: 10.1136/oem.2010.061135. [DOI] [PubMed] [Google Scholar]
- 11.Wang R, Henderson SB, Sbihi H, Allen RW, Brauer M. Temporal stability of land use regression models for traffic-related air pollution. Atmospheric Environment. 2013;64:312–319. [Google Scholar]
- 12.CBS. Statistical Abstracts of Israel. Vol. 58. Central Bureau of Statistics; Israel: 2013. [Google Scholar]
- 13.Israel Ministry of Environmental Protection. Air Quality in Israel. 17–18. Israel Ministry of Environmental Protection; Jerusalem, Israel: 1992. Air Quality in Israel; p. 257. [Google Scholar]
- 14.Allen RW, Amram O, Wheeler AJ, Brauer M. The transferability of NO and NO2 land use regression models between cities and pollutants. Atmospheric Environment. 2011;45:369–378. [Google Scholar]
- 15.Levy I, Mihele C, Lu G, Narayan J, Brook JR. Evaluating Multipollutant Exposure and Urban Air Quality: Pollutant Interrelationships, Neighborhood Variability, and Nitrogen Dioxide as a Proxy Pollutant. Environ Health Perspect. 2014;122:65–72. doi: 10.1289/ehp.1306518. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Levy I, Mihele C, Lu G, Narayan J, Hilker N, Brook JR. Elucidating multipollutant exposure across a complex metropolitan area by systematic deployment of a mobile laboratory. Atmos Chem Phys. 2014;14:7173–7193. [Google Scholar]
- 17.Levin N, Singer ME, Lai PC. Incorporating Topography into Landscape Continuity Analysis—Hong Kong Island as a Case Study. Land. 2013;2:550–572. [Google Scholar]
- 18.Tucker CJ. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sensing of Environment. 1979;8:127–150. [Google Scholar]
- 19.Levin N, Heimowitz A. Mapping spatial and temporal patterns of Mediterranean wildfires from MODIS. Remote Sensing of Environment. 2012;126:12–26. [Google Scholar]
- 20.Su JG, Jerrett M, Beckerman B, Wilhelm M, Ghosh JK, Ritz B. Predicting traffic-related air pollution in Los Angeles using a distance decay regression selection strategy. Environmental Research. 2009;109:657–670. doi: 10.1016/j.envres.2009.06.001. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 21.Beelen R, Hoek G, Vienneau D, Eeftens M, Dimakopoulou K, Pedeli X, Tsai MY, Künzli N, Schikowski T, Marcon A, et al. Development of NO2 and NOx land use regression models for estimating air pollution exposure in 36 study areas in Europe – The ESCAPE project. Atmospheric Environment. 2013;72:10–23. [Google Scholar]
- 22.Wood S. Generalized Additive Models: An Introduction with R. CRC Press; 2006. [Google Scholar]
- 23.Li L, Wu J, Hudda N, Sioutas C, Fruin SA, Delfino RJ. Modeling the Concentrations of On-Road Air Pollutants in Southern California. Environ Sci Technol. 2013;47:9291–9299. doi: 10.1021/es401281r. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 24.Zohar I, Bookman R, Teutsch N, Levin N, de Stigter H. The contamination history of lead and other trace metals reconstructed from an urban winter pond in the Eastern Mediterranean coast (Israel) Environ Sci Technol. 2014;48(23):13592–13600. doi: 10.1021/es500530x. [DOI] [PubMed] [Google Scholar]
- 25.Gonzales M, Myers O, Smith L, Olvera HA, Mukerjee S, Li WW, Pingitore N, Amaya M, Burchiel S, Berwick M. Evaluation of land use regression models for NO2 in El Paso, Texas, USA. Science of The Total Environment. 2012;432:135–142. doi: 10.1016/j.scitotenv.2012.05.062. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 26.Gulliver J, Morris C, Lee K, Vienneau D, Briggs D, Hansell A. Land Use Regression Modeling To Estimate Historic (1962–1991) Concentrations of Black Smoke and Sulfur Dioxide for Great Britain. Environ Sci Technol. 2011;45:3526–3532. doi: 10.1021/es103821y. [DOI] [PMC free article] [PubMed] [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.