

Abstract
This study investigates the detection of the drowsiness state (DS) for future application such as in the reduction of the road traffic accidents. The electroencephalography, electrooculography, driving quality, and Karolinska sleepiness scale data of 7 males during approximately 20 h of sleep deprivation were recorded. To reduce the eye blink artifact, an automatic mechanism based on the independent component analysis method and Higuchi's fractal dimension has been applied. After recordings, for selecting the best subset of features, a new combined method, called class separability feature selection-sequential feature selection, has been developed. This method reduces the time of calculations from 6807 to 2096 s (by 69.21%) while the classification accuracy remains relatively unchanged. For diagnosis of the DS and classification of the state, a new approach based on a self-organized map network is used. First, using the data obtained from two classes of awareness state (AS) and DS, the network achieved an accuracy of 76.51 ± 3.43%. Using data from three classes of AS, AS/DS (passing from awareness to drowsiness), and DS to the network, an accuracy of 62.70 ± 3.65% was achieved. It is suggested that the DS during driving is detectable with an unsupervised network.
Keywords: Driving drowsiness, eye blink artifact, feature selection, independent component analysis, self-organized map network
INTRODUCTION
Due to the drowsiness state (DS), the drivers’ capability for remaining alert and making appropriate decisions might drastically decrease. Driving in a drowsy state can involve serious risks. As reported by the World Health Organization, most road casualties are due to the drivers’ drowsiness.[1] Therefore, detection of the DS at the wheel and application of a viable tool for the DS prediction is a major challenge for different research groups. Numerous methods have already been proposed for the DS detection based on the behavior and reactions of the drivers.[2,3] Some studies have proposed techniques for detection of the driver's drowsiness based on his/her eye and head movements.[4,5] In these techniques, a camera is required to record the individual's body movements.[2] Lal and Craig[6] recorded individuals’ eye movement and blink. Consequently, they found that the fast movements of the eyes as well as the natural eye blinks in the awareness phase are replaced by the short, fast, and regular eye blinks in the DS. Kurylyak et al.[7] offered a noninvasive visual system for recognition of the eye blink artifact and measurement of the tiredness level. In their system, a webcam was designed to record the driver's images. Using the technique of frame differences and thresholding, the amount of openness or closeness of the driver's eyes was thus determined. McIntire et al.[8] used an eye tracker to investigate the eye parameters. They showed that during activities and by the pass of the time, the frequency and time duration of the individuals’ eye blinks drastically change. With the decrease in the individual's level of awareness, the frequency and duration of the eye blink increase. Although the image-based techniques have some benefits, most drivers, nevertheless, do not like to be always monitored by cameras. Conversely, the methods based on the biosignals have proven to be more acceptable. Biosignals are especially useful for collecting information about the body response during a DS. Electroencephalography (EEG) is the most widely used technique for measuring the electric activity of the brain.[8] Several researchers have proposed the EEG analysis for recognition of the DS.[9,10] Brookhuis and Waard showed the inactivation of the cerebral cortex in response to the continuous and monotonous driving.[11] Lal and Craig demonstrated the relationship among the delta, theta, alpha, and beta waves during driving.[12] According to them, as a shift to the DS happens, the ranges of the delta and theta waves considerably increase throughout the individual's head. Besides, as the DS begins, delta and theta activities are observed to be centralized mostly in the central, middle, and front parts of the brain. Numerous studies have already focused on the changes in the power of the EEG signals of the drivers in the theta, alpha, and beta or their combinational wavebands.[13] Mardi et al.[10] used statistical properties and chaos theory for the detection of the DS among drivers. Using appropriate properties, they found an accuracy of 83.3% for the classification of the awareness and DSs. Using mathematical approaches, Li et al.[14] attempted to reduce the number of the channels required for the detection of DS during driving. They performed signal record using 16 channels. Moreover, through the application of the kernel principal component analysis method, they introduced O1 and Fp1 channels as the most valuable channels in recognition of DS during driving. Simon et al.[15] offered the EEG alpha spindles as a criterion for judgment about the driver's drowsiness during driving. Alpha spindles are defined as short time occurrences in the alpha band. According to these researchers, the EEG alpha spindle parameters increase the sensitivity and specificity of recognizing DSs as compared to the power of the alpha band.
In addition to the use of the biosignals for DS recognition during driving, some researchers have deployed signals obtained from the vehicle as well as the individual's driving quality (DQ) signals.[16] In these studies, the driving patterns of the driver are assumed to be different in the awareness and DSs. At present, to detect DS during driving, some products have been produced based on DQ parameters such as steer angle, velocity, speed, and distance from the road lines. However, further studies are required to be conducted on the use of such DQ parameters for detection of the drivers’ DS during driving.[16]
In the present study, using a simple and realistic protocol, EEG, electrooculography (EOG), DQ, and Karolinska sleepiness scale (KSS) signals have been recorded during driving. After reduction of the eye blink artifact, a new combined method has been proposed for selection of the best-extracted feature from the signals. Then, a novel idea based on the self-organized map (SOM) networks was implemented. One objective of the present study is to find differences among the data samples related to the awareness state, the passing from awareness to sleepiness state, and DSs regardless of their corresponding scales. Implementation of this idea can be considered an invaluable step toward a more straightforward detection of DS at the wheel while the need for the use of an external observer and teaching is considerably removed. Furthermore, the aforesaid idea makes it possible to evaluate the results of KSS. The obtained results have then been discussed in next steps.
DATABASE
The research data have been recorded based the driving simulator at Shahed University, Tehran. To record the EEG and EOG data, a 16 channel bio-signal amplifier (g.USBamp, gtec, Austria) has been used. Moreover, DQ data have been recorded using a driving simulation software (accessible at http://opends.de/). The signal recording has been peformed from seven male volunteer students who had experienced around 20 h of sleep deprivation before the test. For consideration of the drowsiness habits of subjects, the Epworth sleepiness scale (ESS) questionnaire has been employed. ESS is an 8-stage questionnaire for recognition of the general state of daily sleepiness.[17] Based on reference,[18] since the average ESS result for our considered volunteers is found to be 11.42, these volunteers are all assumed to be highly sleepy individuals.
During the test, for a better evaluation of DS, KSS has been applied.[19] According to this scale, the span between awakening and beginning of sleep can be divided into 9 stages (shown by the numbers 1–9). Accordingly, number 1 shows the highly aware state, whereas number 9 demonstrates the highly sleepy state. Every 10 min, from the start of the driving, by popping up a rectangle at the bottom of the driving monitor, the driver announces a number from 1 to 9 as KSS test. Fifteen channels of EEG signals were recorded based on the 10–20 electrode standards. Moreover, one channel was assumed for the EOG signal from the left eye. Sampling frequency was set to 256 Hz. The EEG channels are CZ, PZ, O2, P4, F4, FPZ, C4, T6, F8, O1, O3, FP1, T5, T3, and F7. FZ was used as the device ground, and A2 was the signal recording reference. The internal filters of the device for signal recording involved a band-pass filter with the cut-off frequencies of 0.5 Hz and 30 Hz and a notch filter of 50 Hz. The notch filter of 50 Hz has been used to further weaken the signals in the frequency range of the town power. The duration of signal recording per individual was about 50 min. DQ signals obtained from the driving simulation software involve three position signals, four vehicle direction signals, steering angle, gas pedal position, and brake pedal position. The recording frequency of these signals has been about 17 Hz. These signals have then been upsampled to 256 Hz so that they can be synchronized with the biosignals. The driving route is here a rectangular monotonic road with a perimeter of about 1.5 km. There is no other vehicle or obstacle to induce a more natural DS. Thus, the used protocol is straightforward, cost-effective, and based on the real conditions. To enhance the storage of events during the records, the driver's face image, as well as the road image, has been recorded using a webcam. For labeling the data gathered from the results of KSS test, the aforementioned two footages and the notes made during the test have been used. These notes included the abrupt movements of the driver and his specific body postures. After labeling the recorded data, a data set containing 641 observations of both AS and DS classes, as well as 311 observations in AS/DS class, has been used and analyzed.
PREPROCESSING
In the preprocessing stage, we tried to reduce the eye blink artifact as much as possible. To this end, Samavati et al.'s approach have been taken into account.[20] This study proposes a method based on Higuchi's fractal dimension for recognition of the eye blink artifact. This can be explained by the fact that the eye blink artifact production system is different from the dynamic system of generating brain activities. As expected, the system dynamics of the eye blink is simpler than the generation dynamics of the brain activities; hence, the eye blink system dynamics has a lower fractal dimension. The pseudo-code for reduction of the eye blink artifact is as follows:
Calculate independent component analysis (ICA) for each observation
Calculate Higuchi's fractal dimension of each independent component (IC)
Normalize the dimensions
Select IC with the smallest Higuchi's fractal dimension as the main source of the eye blink artifact
Set this IC to zero
Apply reversed ICA on the ICs and find the EEG and EOG channels with reduced eye blink artifact.
In the proposed method by Samavati et al., after normalization of the dimensions, based on training data, a threshold is defined, and ICs with dimensions under the threshold are removed as sources of eye blink artifact. For simplicity of calculations alleviate of the need for training and thresholding procedures, in this study, IC with the smallest Higuchi's fractal dimension is considered the main source of eye blink artifact and removed. For ICA calculation, the FASTICA toolbox (accessible at http://research.ics.aalto.fi/ica/fastica) has been employed. Furthermore, calculations related to the Higuchi's fractal dimension are done using the method.[20]
FEATURE EXTRACTION
To ensure that the signal is stationary, it is divided into 3-s segments, and 756 features are extracted from the whole 27 channels of EEG, EOG, and DQ. Time domain features involve maximum, minimum, standard deviation (SD), and average values. For extraction of the features related to the frequency domain, first, the average of each 3-s segment is removed. Next, power spectral density (PSD) of each segment is estimated using Burg's method (with an AR model of order 20).[21] The extracted features from PSD involve the central frequency, peak frequency, ratio of H to L (RH/L) with H and L standing for absolute value integral of the signal for the frequency ranges of 7–30 Hz and 0–7 Hz, first quarter frequency (Q1F), third quarter frequency (Q3F), SD, interquartile range, skewness coefficient, and kurtosis coefficient.
Wavelet transform is a popular method for extracting different signal dynamics.[22] Using wavelet transform, 15 features have been extracted for each part. The parts have been analyzed using the second order Daubechies discrete wavelet transform which gives a better classification than the other conventional wavelets.[9] The features obtained from subbands D4, D5, and A5 involve zero crossing (ZC), integral of the absolute data (ID), average, SD, and subband wavelet entropy (SWE).[21,22]
FEATURE SELECTION AND CLASSIFICATION
One common method for feature selection is the sequential forward selection (SFS).[23] SFS algorithm starts with an empty subset. The features are singularly added to the considered subset and the new subset is then evaluated. Feature selection is subject to the maximization of the classification accuracy. In the present study, the sum of Mahalanobis distances of the data in each class from the center of the other classes is used as the evaluation function to be maximized.
Using the amount of class separability based on the scattering matrix with respect to the ratio of the corresponding values in between class scattering matrix, Sb, to the values in within class scattering matrix, Sw, is a well-known method for selecting a subset of features. A subset of features which provides high-class separability is assumed as the desired subset. Han and Liu[24] proposed an efficient method for selecting a subset of features (channels), called class separability feature selection (CSFS). This method is based on a new criterion, between variable scattering matrix, Sf, that is defined preventing the features with redundancy be selected. Sf expresses the capability for class separability between the channels that are not selected and the subsets associated with the selected channels. As Sf becomes larger, the amount of redundancy between the channels decreases. In what follows, the steps in this method are explained as pseudo-codes.
Step 1: Feature extraction: Calculate MI[25] using MIToolbox[26] for each pair of the channels and then extract MI (I), according to Eq.1, for the signals of the size m × m.
Where Xi, i = 1, 2,…, m shows the ith channel. Column vector βji = [Ij (X1, (Xi)Ij(X2, Xi)...Ij (Xm, Xi)]T, i = 1, 2,...,m is assumed to be the ith feature from the jth observation. The obtained average for each feature is a vector.
Step 2: Selection of the first onward feature: Calculate Sbi and Swi for each feature using MI matrix obtained from step 1. Then, arrange all channels based on the ratio of Sbi to Swi.

According to Eq. 2, select the variable with the largest value for Jmi as the first member of the subset of S optimal features. Selection of the ith feature as an optimal feature indeed corresponds to the selection of the ith channel as the optimal channel.
Step 3: Select the second, the third, etc., features: For selection of the next channel, it is required to estimate the redundancy between channels. The redundancy value of Sfi can quantitatively be introduced using Eq. 3.

As Jri is larger, more importance is attached to the ith channel for classification. The channel with the largest value of Jri enters the S value.
Step 4: Stop criterion: If ∣S∣ = K, then the algorithm is stopped; otherwise, it starts over from step 3.
In this work, a new method has been developed for selection of optimal features. This method is a combination of the aforementioned SFS and CSFS methods, and hence called CSFS-SFS. In the proposed method, first, a subset of optimal channels is selected based on CSFS. Then, the said features are extracted from the chosen channels. Subsequently, using SFS, a subset of the best features among the best channels is selected.
For classification, a classifier with linear discrimination function has been used. It is assumed that the data from both classes follow a Gaussian distribution. About 75% and 25% of the data have been used for training and testing of the classifier, respectively.
SELF-ORGANIZED MAP NETWORK
Kohonen introduced a nonlinear projection called SOM.[27,28] SOM weights are related to regular neurons arranged in a two-dimensional network. SOM algorithm regulates the structure weights so that the more similar weights are connected to the neighboring neurons in the network and vice versa. Training of SOM network can be divided into two separate phases. First, in which competition occurs, and the winning neuron is determined, the degree of similarity of the inlet data to all neurons is estimated. The neuron with the most similarity to the input data is selected as the winning neuron. Then, the weights related to the winning neuron and the neurons in its neighborhood are updated. In our problem, when data of different classes are designated to an SOM network, the labeling criteria and the results of the KSS test can be evaluated since the SOM network is unsupervised.
RESULTS
In this section, the results of the suggested CSFS-SFS method for feature selection are compared with the conventional SFS method. In the next part, the results obtained from implementation of the new SOM idea are given in two phases. In the first phase, through the application of the data from two classes of AS and DS to the SOM network and investigation of the classification results, the criteria related to the labeling of the said data, which are largely based on the films and reports during the test, are evaluated. Then, using the data of three classes of AS, AS/DS, and DS, the SOM network is trained and tested. Algorithms have been implemented using MATLAB 2013 (The MathWorks, Inc) running on a PC with 3.01 GHz AMD CPU and 1 GB Ram.
Feature Selection Results
First, using SFS method, a subset of optimal features has been selected and the classification results have been found. Then, using CSFS-SFS method, a 13-member subset of optimum channels has been selected. Then, the introduced features among the selected channels have been extracted and an optimum subset has been chosen from them.
Figure 1 shows the results for the accuracy of the linear classification versus the number of the selected features using SFS (the right-hand diagram) and CSFS-SFS (the left-hand diagram). The reported results are associated with the average of 15 times of training and testing of the classifier. The best accuracy, in both methods, is achieved by selecting a 100-member subset of the features. For this subset of features, in SFS method, the median value and first- and third-quarters are 70.41%, 67.99%, and 73.61%, respectively. The corresponding values in CSFS-SFS method are 69.60%, 71.00%, and 67.56%, respectively. The calculations times for obtaining a 100-member subset of features using the SFS and CSFS-SFS methods are 6807 s and 2096 s, respectively. The 69.21% decrease in the time of calculations under the CSFS-SFS method can be ascribed to the substantial decrease in the repeated calculations by selection of the best channels in the first phase of the calculations. From the 100 selected features, in SFS method, an average number of 67.46 and 32.54 features among the biosignals and DQ signals, respectively, have been selected. The results for the CSFS-SFS method show that an average number of 8.33 channels and 4.66 channels are related to the biosignals and the DQ signals, respectively. These results show that, in both methods, the informative value of the extracted features from the biosignals is two times as great as the informative value of the extracted features from the DQ signals.
Figure 1.

Accuracy of classification through the feature selection under sequential forward selection (right diagram) and class separability feature selection-sequential forward selection (left diagram) methods
For investigation and comparison of the informative values of the 28 calculated features, the selection percentage of each of these two methods is calculated and shown in Figure 2. In the SFS method, the features of STD_D4, SWE_D5, F_Q1F, ID_A5, and SWE_D4 are ranked 1–3 and have the most informative value. In the suggested CSFS-SFS method, the three best features are the ID_D5, ZC_D5, and ID_D4. It can be observed that in these three best features, in both methods, the most selected feature is related to the wavelet transform domain. In the biosignals, the approximations and details used in the wavelet transform are associated with the frequency bands of delta, theta, and alpha, and the features obtained from them are the most important.
Figure 2.

Selection percentage of features in 15 times selection process using sequential forward selection (orange) and class separability feature selection-sequential forward selection (blue) methods
Self-organized Map Network Results
In the first phase for implementation of the idea of using the SOM network, the number of data for either of the classes of AS and DS is 641. Using 75% of the involved data, the 9 × 9 SOM network is trained. These data are described with 100 selected features using the CSFS-SFS method. The network setups are considered in compliance with the default setups in the MATLAB software toolbox. After the unsupervised SOM network is trained, any single neuron can be labeled based on the available labels from the training data. It should be emphasized that these labels were not used for the training of the SOM. The neuron is labeled by the class with the most number of times of selecting the said neuron. Figure 3 shows the designation of the labels related to each neuron in the SOM network for both classes of AS (1) and DS (2) after training procedure. To test the network, test data from class AS and class DS were applied to the network, and we compared the label of the selected neuron with the real input label. For 5 times of training and testing of the network, the accuracy of 76.51 ± 3.43% has been obtained. SOM network training is unsupervised, and so it can be regarded as a criterion for evaluation of the procedure defined for labeling. The high compatibility between the results of the SOM network and those of the performed labeling is indicative of the accuracy of our defined labeling system. For labeling of the AS and DS data, decision priority is given to the criterion related to the films and reports.
Figure 3.
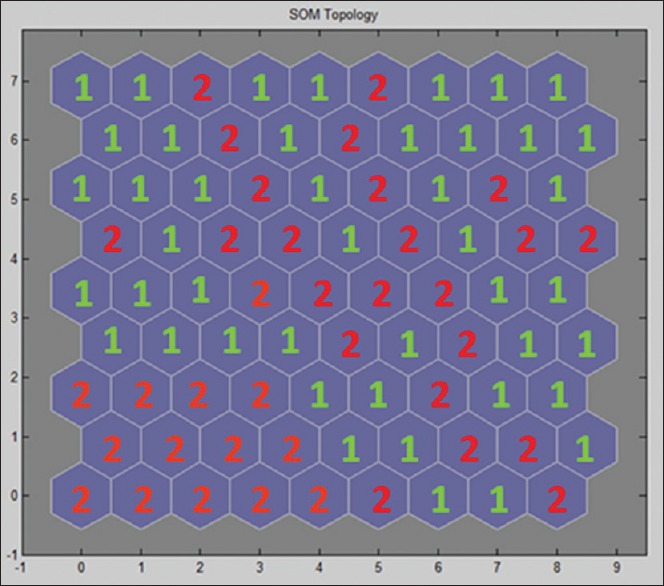
Neurons’ labels in self-organizing map network for awareness state (1) and drowsiness state (2) classes after training procedure
Under the assumption that the results related to the feature selection are reliable for three classes of AS, AS/DS, and DS, 75% of observations are separated and a number of 100 features are selected using the CSFS-SFS method. For equality of the number of data, 310 observations are considered for each class. These data are applied to an SOM network with dimensions of 8 × 8. After the SOM network is trained, the neurons are labeled [Figure 4]. After training, the test data related to each class are separately applied to it, for which a detection accuracy of 62.70 ± 3.65% is obtained. This result shows that the drowsiness trend during driving is detectable and can be determined calculation methods. As long as the driver's state is at the place of neurons 1, the driving condition is safe. By entering into the place of neurons 2, the driver is indeed in an alert state. If the driver enters the location of neurons 3, the driving is highly risky, and decisions should be made to avoid problems. Since in the labeling procedure of the AS/DS data, decision-making about the KSS criterion is prioritized, the results of the SOM network are thus a verification of the KSS results. This also demonstrates a bilateral agreement between the said test and the mathematical calculations from the unsupervised SOM procedure.
Figure 4.
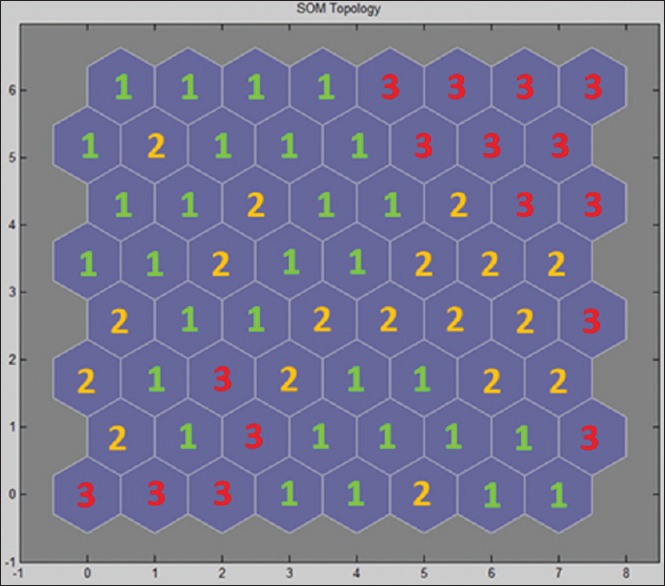
Neurons’ labels in self-organizing map network for alert state (1), alert state/drowsiness state (2), and drowsiness state (3), classes after training procedure
DISCUSSION
In this study, an analysis of the existing patterns in the recorded EEG, EOG, and DQ signals for detection of drowsiness during driving has been provided. Advantages of the defined protocol are shown the reliability and the realistic nature of the data involved. The monotonous and repetitive nature of the road, along with the nonexistence of any other vehicle or traffic signs in the track, might contribute to the passing from AS to DS. In addition, by simultaneous recording of three signal groups, we tried to produce complete datasets. Previous studies have simply been conducted on a single group of signals. Due to the ESS test, obtained dataset is related to a group of nonprofessional drivers, for whom are subsumed under the highly sleepy group of individuals. The homogeneity of the daily drowsiness record of the considered participants in the recording procedure can be regarded as another strongpoint of proposed protocol. To reduce the eye blink artifact, it has been attempted to determine the main source of the artifact based on ICA and Higuchi's fractal dimension. The advantage of this method is its automaticity and alleviation of the need for training procedure. Moreover, in this method, the detection of eye blink artifact is performed quickly and just through one single observation. These advantages allow for the easy hardware implementation of the system.
In the proposed CSFS-SFS method, CSFS and SFS methods are combined, and thus, the best features among the best channels are selected. This is a strategically important consideration since any decrease in the number of the required sensors for equipment production might result in the decrease in the calculation time and production costs. In this method, redundant calculations drastically decrease and a 69.21% reduction in the time of calculations is achieved, compared to SFS method. The average accuracy per a 100-member subset in the SFS and CSFS-SFS methods are 70.33 ± 3.45% and 69.73 ± 3.45%, respectively. The 0.6% reduction in the classification accuracy of the suggested method is not significant considering the SD of 3.45%. Accordingly, the implementation of the proposed method and its use in the practical systems is easier since, in these systems, great importance is attached to the low volume of calculations, processor occupancy level, and power losses.
Through a statistical comparison of the selected channels in the SFS method and the selected channels in the first stage of our proposed method, it can be observed that, in both methods, a number of selected channels associated with the biosignals are approximately two times as large as the selected channels related to the DQ signals. This result shows that the informational value of the biosignals is twice greater than the informational value of the DQ signals. Statistically viewed, as indicated by the recorded literature, most previous studies on the drowsiness during driving have already focused on the investigation of the biosignals. These two statistical results demonstrate that the information obtained from the biosignals is more reliable that the information from DQ signals. However, better detection can be achieved through the combination of the gathered information from both signal groups. In this study, the three channels of C4, O1, and T3 are, respectively, the best channels among the biosignals. Mardi et al.[10] suggested the channels of T3, F7, and O1 as the most valuable channels in diagnosis of drowsiness during driving. However, Li et al.[14] assumed Fp1 and O1 to be the most valuable channels. Although the present study makes use of the DQ signals, in addition to the biosignals (in previous studies, only the biosignals were considered), nevertheless, the close correspondence between the best channels for biosignals indicates that the presence of the DQ signals along with the biosignals has not produced fundamental changes in the order of importance for the biosignal channels. Based on the results of the present study and those of the two previous works,[11,15] it can be seen that, in diagnosis of the DS during driving, the data from the left brain hemisphere have more informative value than the data obtained from the right cerebral hemisphere. Figure 2 shows that in both methods, almost all superior features are related to the field of wavelet transform. Due to the best features and the double value of the biosignals compared to the DQ signals, it can be understood that the extracted features from the approximation A5 and details D5 and D4, which are equal to the frequency bands of delta, theta, and alpha in biosignals, respectively, are of the most informative importance. Last, the wavelet transform has successfully afforded to diagnose and extract the different dynamics in the signals and has thus provided the most valuable diagnostic information.
The implemented idea based on the SOM network is an intervention, which permits the visualization and diagnosis of the drowsiness trend. As the first step of this idea, the data of classes AS and DS have been applied to the SOM network. The accuracy of 76.51 ± 3.43% obtained completely verifies the labeling criteria of the two classes. In general, one important challenge to the studies on the diagnosis of the DS during driving is to show how the data can be labeled. Therefore, some researchers prefer to use the recorded data related to the study of the sleep process. Due to the differences such as the voluntary and involuntary sleep conditions,[29] these groups of studies do not have any considerable functional value for the diagnosis of the DS during driving. By the second step of the suggested idea concerning the use of the SOM network, the data of three classes of AS, AS/DS, and DS are applied to the network. The results with an accuracy of 62.70 ± 3.66% show that these data select different neurons in the network. Consequently, the movement from the AS to the DS state can be diagnosed, and thus, proper decisions are made to control the driver's conditions. Besides, this mapping can be projected on a screen, which is continually shown to the driver. This tactic can help the drivers to have a better understanding of their mental states in practice. One concern by the researchers in the field of the signal processing is to determine the reliability of the tests used as the subjective indexes for the DS diagnosis. In this study, for the data labeling, especially the data related to class AS/DS, priority is given to the KSS results. SOM results and their agreement with the KSS ones verify the reliability of the KSS results.
This study can be considered a reliable attempt to develop a comprehensive system for the diagnosis of the drivers’ DSs. In this context, it is hoped that our obtained results will be used as a basis for the conduction of further studies in this field.
Financial Support and Sponsorship
Nil.
Conflicts of Interest
There are no conflicts of interest.
BIOGRAPHIES

Seyed Mohammad Reza Noori received his B.Sc. degree in Electronic Engineering from Shahid Chamran University, Ahvaz, Iran 2012, and his M.Sc degree in Biomedical Engineering from Shahed University, Tehran, Iran, in 2015. His research interests include biological signal/image processing and bioinstrumentation.
E-mail: smrezanoori@gmail.com

Mohammad Mikaeili received a B.Sc. Degree in Electronic Engineering from Tehran University, Tehran, Iran, in 1989, and M.Sc. and Ph.D. Degrees in Biomedical Engineering from the Amirkabir University, Tehran, Iran, in 1994 and 2001, respectively. Since 2001, he has been with Shahed university, where he is currently an Assistant Professor at Engineering faculty. His current research interests include Biomedical signal processing, Sleep EEG analysis and BCI systems.
E-mail: m_mikaili@yahoo.com
REFERENCES
- 1.Word Health Organization, Global Health Observatory Data Repository. 2013 [Google Scholar]
- 2.Chang TH, Hsu CS, Wang C, Yang LK. Onboard measurement and warning module for irregular vehicle behavior. IEEE Trans Intell Transp Syst. 2008;9:501–13. [Google Scholar]
- 3.Sandberg D, Åkerstedt T, Anund A, Kecklund G, Wahde M. Detecting driver sleepiness using optimized nonlinear combinations of sleepiness indicators. IEEE Trans Intell Transp Syst. 2011;12:97–108. [Google Scholar]
- 4.Smith P, Shah M, Da-Vitoria-Lobo N. Determining driver visual attention with one camera. IEEE Trans Intell Transp Syst. 2003;4:205–18. [Google Scholar]
- 5.Dikkers HJ, Spaans M, Dactu D, Novak M, Rothkrantz LJ. Facial recognition system for driver vigilance monitoring. Proc IEEE Syst Man Cybern. 2004;4:3787–92. [Google Scholar]
- 6.Lal SK, Craig A. Driver fatigue: Electroencephalography and psychological assessment. Psychophysiology. 2002;39:313–21. doi: 10.1017/s0048577201393095. [DOI] [PubMed] [Google Scholar]
- 7.Kurylyak Y, Lamonaca F, Mirabelli G. Proceedings of the IEEE International Symposium on Medical Measurements and Applications Proceedings (MeMeA); 2012. Detection of the Eye Blinks for Human's Fatigue Monitoring. [Google Scholar]
- 8.McIntire LK, McKinley RA, Goodyear C, McIntire JP. Detection of vigilance performance using eye blinks. Appl Ergon. 2014;45:354–62. doi: 10.1016/j.apergo.2013.04.020. [DOI] [PubMed] [Google Scholar]
- 9.Ashtiani SN, Mardi Z, Mikaili M. 18th Iranian Conference on Biomedical Engineering; 2011. Spectral Characteristics Assessment in Recognition of Drivers’ Drowsiness Using Statistical Tests. [Google Scholar]
- 10.Mardi Z, Ashtiani SN, Mikaili M. EEG-based drowsiness detection for safe driving using chaotic features and statistical tests. J Med Signals Sens. 2011;1:130–7. [PMC free article] [PubMed] [Google Scholar]
- 11.Brookhuis KA, Waard D. The use of psychophysiology to assess driver status: Psychophysiological measures in transport operations (special issue) Ergonomics. 1993;36:1099–110. doi: 10.1080/00140139308967981. [DOI] [PubMed] [Google Scholar]
- 12.Lal SK, Craig A. Psychophysiological effects associated with drowsiness: Driver fatigue and electroencephalography. Int J Psychophysiol. 2000;35:39. [Google Scholar]
- 13.Borghini G, Astolfi L, Vecchiato G, Mattia D, Babiloni F. Measuring neurophysiological signals in aircraft pilots and car drivers for the assessment of mental workload, fatigue and drowsiness. Neurosci Biobehav Rev. 2014;44:58–75. doi: 10.1016/j.neubiorev.2012.10.003. [DOI] [PubMed] [Google Scholar]
- 14.Li W, He QC, Fan XM, Fei ZM. Evaluation of driver fatigue on two channels of EEG data. Neurosci Lett. 2012;506:235–9. doi: 10.1016/j.neulet.2011.11.014. [DOI] [PubMed] [Google Scholar]
- 15.Simon M, Schmidt EA, Kincses WE, Fritzsche M, Bruns A, Aufmuth C, et al. EEG alpha spindle measures as indicators of driver fatigue under real traffic conditions. Clin Neurophysiol. 2011;122:1168–78. doi: 10.1016/j.clinph.2010.10.044. [DOI] [PubMed] [Google Scholar]
- 16.Krajewski J, Sommer D, Trutschel U, Edwards D, Golz M. Proc. Fifth International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design; 2009. Steering Wheel Behavior Based Estimation Of Fatigue; pp. 118–24. [Google Scholar]
- 17.Johns MW. A new method for measuring daytime sleepiness: The Epworth sleepiness scale. Sleep. 1991;14:540–5. doi: 10.1093/sleep/14.6.540. [DOI] [PubMed] [Google Scholar]
- 18.Smyth C. The Epworth Sleepiness Scale (ESS) Medsurg Nurs. 2009;18:134. [PubMed] [Google Scholar]
- 19.Akerstedt T, Gillberg M. Subjective and objective sleepiness in the active individual. Int J Neurosci. 1990;52:29–37. doi: 10.3109/00207459008994241. [DOI] [PubMed] [Google Scholar]
- 20.Samavati M, Nasrabadi AM, Mohammadi MR. Proceeding of 20th Iranian Conference on Electrical Engineering, (ICEE 2012); 2012. Automatic Minimization of Eye Blink Artifacts Using Fractal Dimension of Independent Components of Multichannel EEG; pp. 15–7. [Google Scholar]
- 21.Al-Nashash HA, Paul JS, Thakor NV. 1st International IEEE EMBS Conference on Neural Engineering; 2003. Wavelet Entropy Method for EEG Analysis: Application to Global Brain Injury; pp. 348–51. [Google Scholar]
- 22.Garcés Correa A, Orosco L, Laciar E. Automatic detection of drowsiness in EEG records based on multimodal analysis. Med Eng Phys. 2014;36:244–9. doi: 10.1016/j.medengphy.2013.07.011. [DOI] [PubMed] [Google Scholar]
- 23.Reunanen J. Overfitting in making comparisons between variable selection methods. J Mach Learn Res. 2003;3:1371–82. [Google Scholar]
- 24.Han M, Liu X. Feature selection techniques with class separability for multivariate time series. J Neurocomputing. 2013;110:29–34. [Google Scholar]
- 25.Doquire G, Verleysen M. Feature selection with missing data using mutual information estimators. Neurocomputing. 2012;90:3–11. [Google Scholar]
- 26.Brown G, Pocock A, Zhao MJ, Lujan M. Conditional likelihood maximisation: A unifying framework for information theoretic feature selection. J Mach Learn Res. 2012;13:26–66. [Google Scholar]
- 27.Kohonen T. The Self-organizing maps. Proc IEEE. 1990;78:9. doi: 10.1109/72.80208. [DOI] [PubMed] [Google Scholar]
- 28.Kohonen T. Essentials of the self-organizing map. Neural Netw. 2013;37:52–65. doi: 10.1016/j.neunet.2012.09.018. [DOI] [PubMed] [Google Scholar]
- 29.Yeo MV, Li X, Wilder-Smith EP. Characteristic EEG differences between voluntary recumbent sleep onset in bed and involuntary sleep onset in a driving simulator. Clin Neurophysiol. 2007;118:1315–23. doi: 10.1016/j.clinph.2007.02.001. [DOI] [PubMed] [Google Scholar]