

Abstract
When lifting novel objects, individuals' fingertip forces are influenced by a variety of cues such as volume and apparent material. This means that heavy-looking objects tend to be lifted with more force than lighter-looking objects, even when they weigh the same amount as one another. Expectations about object weight based on visual appearance also influence how heavy an object feels when it is lifted. For instance, in the “size-weight illusion,” small objects feel heavier than equally weighted large objects. Similarly, in the “material-weight illusion,” objects that seem to be made from light-looking materials feel heavier than objects of the same weight that appear to be made from heavy-looking materials. In this study, we investigated these perceptual and sensorimotor effects in IW, an individual with peripheral deafferentation (i.e., a loss of tactile and proprioception feedback). We examined his perceptions of heaviness and fingertip force application over repeated lifts of objects that varied in size or material properties. Despite being able to report real weight differences, IW did not appear to experience the size- or material-weight illusions. Furthermore, he showed no evidence of sensorimotor prediction based on size and material cues. The results are discussed in the context of forward models and their possible influence on weight perception and fingertip force control.
Keywords: size-weight illusion, material-weight illusion, grip force, load force, deafferentation
although vision plays an important role in guiding our actions, other sensory modalities also contribute to the successful completion of goal-directed tasks. Our sense of touch, for example, is critical for a range of behaviors, from simple manual localization (Rao and Gordon 2001) to complex object interaction. Indeed, recent work has even suggested that haptic feedback might underpin the apparent skill with which the famous visual form agnosic patient DF grasps objects that she cannot visually distinguish (Schenk 2012; see Whitwell and Buckingham 2013 for discussion). It is clear that the role of haptic feedback in sensorimotor control is complex and relatively understudied. In the context of object interaction, it is known that haptic feedback plays a role beyond guiding our behavior online. Lifting objects, even when they are new to us, tends to be a predictive process, with fingertip force parameters reflecting the apparent, rather than actual, weight of what is being lifted. Because of the feed-forward nature of object-lifting behaviors, slight errors in the parametrization of fingertip forces are commonplace. In this context, fingertip afferents signal object contact and, if necessary, automatically trigger corrective responses when too much or too little force is applied (for review, see Johansson and Flanagan 2009). Similar mechanisms also guide trial-by-trial corrective processes, ensuring that subsequent lifts are undertaken with more appropriate grip and load forces. Vision also appears to play a role in this so-called fingertip force adaptation (Buckingham and Goodale 2010a; Buckingham et al. 2011a), although it is far from clear what information is provided by vision and touch when detecting and correcting these grip and load force errors.
For many, the sense of touch is more associated with the conscious perception of object properties than it is with the control of action. Indeed, humans are quite skilled at identifying a range of properties with their fingertips (e.g., surface compliance, Drewing and Ernst 2006; shape, Lederman and Klatzky 2009). A perceptual property that can only be detected through tactile cues is an object's weight. Interestingly, even though an object's weight can only be experienced by interacting with the object, the conscious experience of how heavy an object feels can be influenced by a variety of factors. The subjective nature of weight perception is most dramatically demonstrated in the “size-weight illusion” (SWI), where small items feel heavier than equally weighted large items (Charpentier 1891; Nicolas et al. 2012). This robust, unchanging, and cognitively impenetrable misperception of object weight is thought to reflect the role of cognitive expectations on subsequent perception of heaviness (Flanagan et al. 2008). Due to a lifetime of experiencing the positive correlation between size and mass, lifters expect large objects to outweigh small objects and therefore experience large objects as feeling lighter than expected, and vice versa (for review, see Buckingham 2014). Indeed, a single object can be made to feel as if it has substantially different weights if an individual is primed to expect to be lifting something heavier or lighter than the object they eventually interact with (Buckingham and Goodale 2010a; Buckingham et al. 2011b). Similar illusory weight differences can also be induced by varying the surface material properties of sets of objects such that a cube of low-density material will feel heavier than an identically weighted cube of apparently higher density material, the so-called “material-weight illusion” (MWI) (Ellis and Lederman 1999; Seashore 1899).
Despite over 100 years of research on this effect, little is known about the physiological mechanisms underpinning these weight illusions (Ernst 2009). Even though a wide range of peripheral factors can also influence weight perception (e.g., surface friction, grip aperture, Flanagan and Bandomir 2000), the magnitude of these illusions are is related to grip and load force rates on a trial-by-trial basis (Buckingham et al. 2009; Flanagan and Beltzner 2000; Grandy and Westwood 2006; Mon-Williams and Murray 2000). Furthermore, the SWI does not appear to interact with or influence the lifter's level of fatigue in the context of exercise behavior (Buckingham et al. 2014).
To shed light on how central factors interact with peripheral factors to drive weight perception, we examined the perception of heaviness and fingertip force control in IW, an individual with long-term peripheral deafferentation who has been living without tactile feedback or proprioception for the past three decades. IW has been studied at great length, and his contributions have been fundamental to understanding the role of haptic feedback in a variety of tasks and a model for the degree to which visual feedback can replace these cues (for an informal review, see Cole and Paillard 1995). Some of the earliest studies on IW have already gone some way to determining his capacity and methods used for weight discrimination. This work has shown that when permitted to lift an object with visual feedback of his action, he is able to discriminate weights with surprising skill, at a similar threshold to control subjects (Cole and Sedgwick 1992; for similar findings with a different deafferented individual, see Fleury et al. 1995). IW is, unsurprisingly, substantially worse than controls when making these judgments with his eyes closed, being able to distinguish 100% changes in weight only. It is thought that he is able to use visual cues to report object weight by lifting each object with a set force pulse and then using relative velocity and distance of movement as a cue to mass; a lighter weight will lead to a faster arm lift, in which the object moves farther. When lifting without vision, his ability to detect gross changes in object weight may arise from a number of sensory signals, such as subtle associated movements in the head and vestibular apparatus (his impairments in touch and proprioception are below the neck) that cannot be isolated completely from his arm movements (Cole and Sedgwick 1992; Miall et al. 2000).
To better understand how weight illusions are related to the discrimination of real object mass, as well as to examine a novel aspect of IW's perceptual and sensorimotor repertoire, we examined fingertip forces and perceptions of heaviness over repeated lifts of various stimuli that varied in mass and surface material. When lifting such stimuli, unimpaired individuals will initially lift the objects with forces that reflect how heavy they look, meaning that large objects will be lifted at a higher rate of force than small objects and dense-looking objects will be lifted at a higher rate of force than less dense-looking objects, regardless of their mass (Buckingham et al. 2009; Buckingham and Goodale 2010b). When reporting how heavy these objects feel, normal populations also experience size- and material-weight illusions, reporting that small objects feel heavier than identically weighted larger objects in the case of the former, and materials that appear to be high density feel lighter than identically weighted objects that appear to be made from low-density materials. Given IW's well-established reliance on vision for controlling his movement, we expected him to give a particularly strong weighting to visual cues to object mass. Thus it was likely that he would show normal or supranormal levels of sensorimotor prediction, lifting the heavy-looking stimuli at a far higher rate of force than the light-looking stimuli in the size- and material-weight conditions. Furthermore, although less was known about IW's perceptual capabilities, given that he is able to distinguish object weight when watching himself lift, a process mediated by visual feedback, we predicted that the visual cues to object mass would influence his perception of heaviness to an even greater degree than unimpaired individuals and that he would experience larger-than-average size- and material-weight illusions.
METHODS
Participant
IW is a left-handed male who suffered a complete large myelinated fiber sensory peripheral neuronopathy at age 19 yr due to an illness. He has no sense of proprioception or light touch below spinal level C3 and has little or no sense of haptic feedback. He is able to experience thermal cues and pain and has normal motor nerve and muscle function as assessed through electromyography. Following a lengthy period of rehabilitation, he has regained his ability to move, albeit slowly, which requires a high degree of attention and constant visual supervision. A more complete case description can be found from earlier work by Cole and Sedgwick (1992). At the time of testing, IW was 62 yr old. IW's perceptual reports and lifting performance were compared with those of a group of seven right-handed control participants (5 male; mean age 59.3 yr, range 55–63 yr), all of whom were members of staff at Heriot-Watt University. IW and the control participants undertook all procedures with their dominant hand, because previous work has shown no difference in this task between left- and right-handed individuals (Buckingham et al. 2012). All participants gave informed consent prior to testing, and all procedures were approved by the local ethics board.
Materials and Procedure
Size-weight illusion.
IW gripped and lifted a series of six black plastic cylinders that varied in size and weight (Fig. 1A). Three of the cylinders (the heavy set) weighed 550 g, and the other three (the light set) weighed 400 g. All cylinders were 10 cm tall, and the large cylinders had a diameter of 10 cm, the medium cylinders had a diameter of 7.5 cm, and the small cylinders had a diameter of 5 cm. These objects were designed to induce the SWI, and unimpaired individuals will usually report that the small cylinder feels substantially heavier than the large cylinder (for review, see Buckingham 2014). The cylinders had small rubber feet attached to their bottom surface and a plastic mount attached to their top surface. This mount facilitated the quick attachment and removal of an aluminum and plastic handle containing a pair of ATI Nano17 force transducers, which IW used to lift the object using a precision grip on textured grasp pads (Fig. 1C). These transducers recorded forces in 3 dimensions at 1,000 Hz. Grip force was defined as the force applied orthogonal to the transducer's surface, whereas load force was the vector sum of the remaining forces. These forces were filtered with a 14-Hz 4th-order Butterworth filter and differentiated using a 5-point central difference equation to yield grip force rate and load force rate. The peak value of the rates of change served as the dependent variables reflecting sensorimotor prediction (peak grip force rate and peak load force rate).
Fig. 1.

The 6 size-weight illusion (SWI)-inducing objects used in experiment 1 (A), the 3 material-weight illusion (MWI)-inducing objects used in experiment 2 (B), and the handle used to lift the objects in both experiments (C).
With full visual feedback, IW lifted and judged the weight of the SWI-inducing cylinders at his home in front of a large dining table while seated in a comfortable chair. Following a series of practice trials with nonexperimental objects, IW was asked to rate how heavy he expected each cylinder to be on the basis of its visual appearance by using an arbitrary numerical scale, with larger numbers indicating heavier-looking objects (i.e., an absolute magnitude estimation; Zwislocki and Goodman 1980). He then rested his dominant left hand on the table surface and closed his eyes while one of the cylinders was placed directly in front of him. On each trial, an auditory cue signaled him to open his eyes and lift the cylinder a short distance off the table surface with a thumb and forefinger precision grip on the grasp handle in a smooth, controlled, and confident fashion. He was asked to keep the object still at the apex of his lift until a second cue (5 s after the first) signaled him to gently place the object back on the table. Once he had released the object, he then gave the numerical rating of how heavy the object felt on that trial. These values were normalized to a Z distribution to remove individual variability in the range of their arbitrary scale, and the average of these values for each cylinder served as the dependent variable reflecting perceptions of heaviness.
To explicitly examine the effects of sensorimotor prediction on IW's initial lifts, a specifically designed trial order was used. First, he lifted the 400-g medium-sized cylinder 5 times in a row (the “lead-in phase”). He then lifted the large 400-g cylinder, followed by the small 400-g cylinder. Typically behaving participants would, under such circumstances, grip and lift the large object with a higher rate of force than the medium object and grip and lift the small object with lower rate of force than the other two objects. The rest of the objects were then presented 10 times apiece in a pseudorandom order for a total of 65 lifts over the course of ∼45 min. Control participants undertook exactly the same procedure, with the same lifting order, in a laboratory at Heriot-Watt University.
Material-weight illusion.
In the second experiment, IW gripped and lifted three cubes that appeared to be made from polystyrene, wood, and stone (Fig. 1B). All cubes were the same size (10 × 10 × 10 cm) and weight (700 g). The polystyrene cube was formed from a hollow plywood cube surrounded with ∼1-cm-thick expanded polystyrene, whereas the wood and stone cubes were plywood cubes covered in thin sheets of countertop veneer (stained oak and granite effect, respectively). All cubes were centrally weighted with lead shot to their target weight and provided convincing simulacra of solid cubes made from their apparent materials.
The procedure for this second experiment was identical to the first. In terms of stimulus presentation, a similar trial order was utilized. IW first lifted the wooden object five times in a row, followed by the polystyrene cube, and then the stone cube. A typical participant would, under such circumstances, use lower grip and load force rates to pick up the polystyrene cube than the wooden cube and higher rates to grip and lift the stone cube than the rest of the set. Following these initial 3 trials, the objects were presented in a pseudorandom order 10 times apiece (35 lifts in total) over the course of ∼20 min. Again, control participants also undertook this task in the laboratory, immediately after they had completed the SWI task.
RESULTS
Size-Weight Illusion
Before lifting, IW reported that he expected the large cylinders to outweigh the medium cylinders, which he in turn expected to outweigh the small cylinders. In terms of his perception of how heavy the objects felt after lifting, IW clearly reported that the heavy objects felt, on average, heavier than the light objects. However, his perception of object weight was apparently unaffected by object volume: he experienced the small, medium, and large objects in each set as having similar weights to one another when collapsed across object mass (Fig. 2A). In other words, even though he readily reported a real 150-g weight difference, IW did not experience the SWI. By contrast, our control sample appeared to experience the illusory weight difference as being approximately the same magnitude as the real weight difference (Fig. 2B). We confirmed this observation by comparing IW's perception illusory and real weight differences with those of our control sample. To do this, we first calculated a metric of the perceived magnitude of the illusion by averaging the small-large difference score for the light and heavy objects. Next, we calculated a metric of the perceived magnitude of the real 150-g weight difference by averaging the heavy-light difference scores for the small, medium, and large objects. We then compared the magnitude of IW's real and illusory weight perception with that of our control sample using Crawford's modified significance test (Crawford et al. 2010), which is designed to test whether an individual case's score is significantly different from that of a small control sample while controlling for inflated type-1 error rate. These tests confirmed that IW experienced a significantly smaller SWI than the control participants [0.06 vs. 0.82; t(6) = 3.21, P = 0.018], whereas his perception of a real 150-g weight difference was approximately the same as that of the control participants [0.90 vs. 1.11; t(6) = 1.14, P = 0.31; Fig. 2C].
Fig. 2.
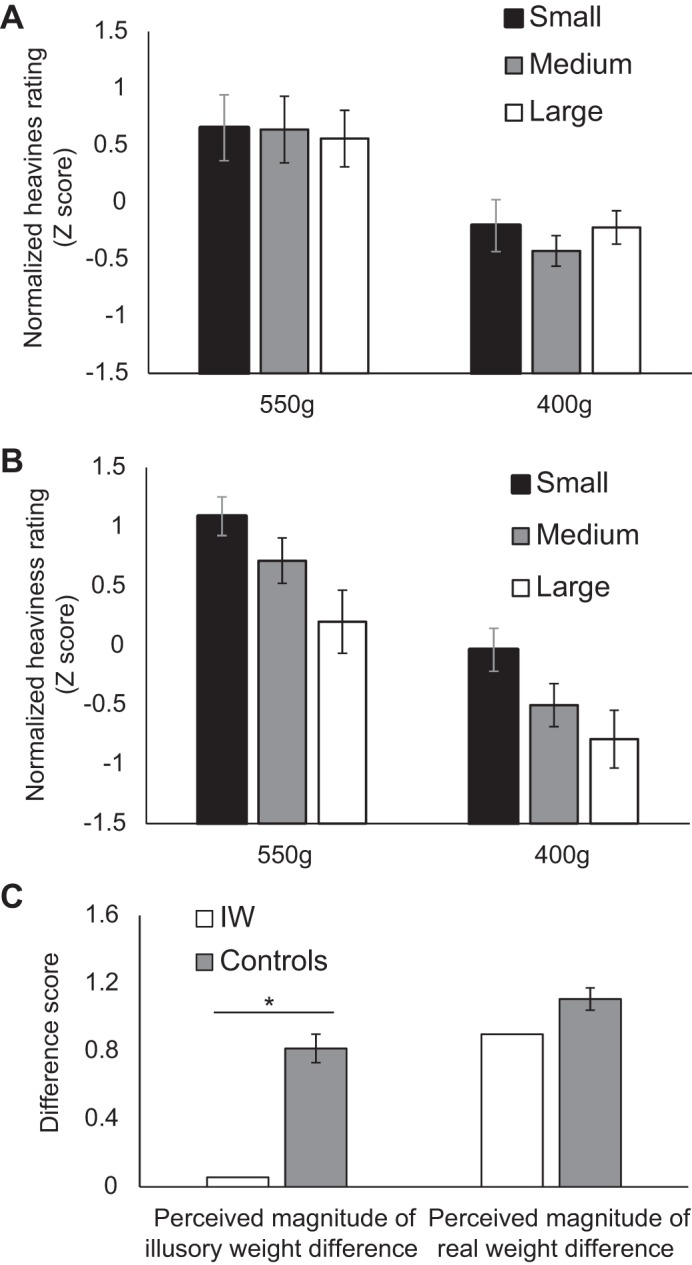
Average heaviness ratings given across the 10 lifts of each of the objects lifted in this task following the lead-in trials reported by IW (A) and the control sample (B). Error bars in A and B show IW's SE and average control sample SE, respectively. The perceived magnitudes of the real and illusory weight differences (small–large and heavy–light, respectively) for IW and the control sample are shown in C. Error bars show average control sample SE. *P < 0.05 indicates a significant difference.
In addition to perceptions of heaviness, we also examined IW's gripping and lifting force rates on the initial lift of each object and compared his behavior with that of our control sample. One control participant's lifting data were lost due to experimental error, so the control group for this analysis contains six individuals. First, we examined whether he initially lifted in an unusual fashion by comparing the magnitude of his initial fingertip forces used on the first lift of each cylinder to that of our control sample. We found no differences between IW and controls average fingertip forces, in terms of either grip force rate [35.6 vs. 65.1 N; t(5) = 1.3, P = 0.26] or lift force rate [15.3 vs. 27.6 N; t(5) = 0.8, P = 0.46], suggesting that IW gripped and lifted in a broadly normal fashion. IW's raw grip and load force profiles, and the associated force rates, are shown in Fig. 3.
Fig. 3.

Grip force (A), load force (B), grip force rates (C), and load force rates (D) used by IW to initially lift the medium, large, and small cylinders. The arrows indicate the peak values used for the analysis of sensorimotor prediction, shown in Fig. 4. Note the initial blue spike in load force rate in D was likely a consequence of IW accidentally bumping the transducer with his fingers before picking up the object (clearly visible in B) and thus was not analyzed.
With regard to sensorimotor prediction, our control participants showed the expected behavior, initially gripping and lifting the large cylinder with a higher rate of force than the small cylinder (Fig. 4, right). Qualitatively, IW showed little evidence of sensorimotor prediction based on volume cues with his gripping behavior (Fig. 4A, left) but some evidence of sensorimotor prediction from volume cues in terms of his load force rates (Fig. 4B, left). To directly compare the effect of object size on initial sensorimotor prediction, we subtracted the force rate used to initially lift the small cylinder from the force rate used to lift the large cylinder, and compared the difference for IW with that for the control sample using Crawford's modified significance test, finding no statistical difference between IW and the controls in terms of grip force rate prediction [−0.9 vs. 13.5 N; t(5) = 0.43, P = 0.68] or lift force rate prediction [5.8 vs. 5.1 N; t(5) = 0.06, P = 0.96].
Fig. 4.
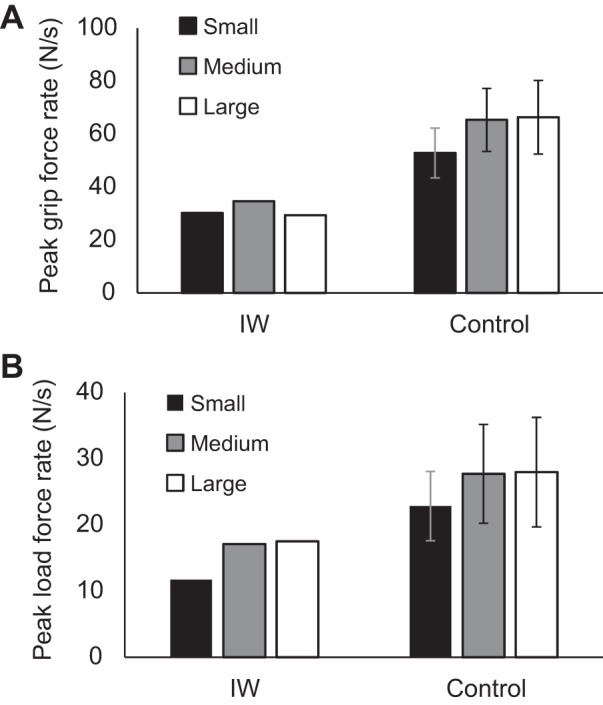
Peak grip force rates (A) and peak load force rates (B) used during the initial lift of the large light, medium light, and small light cylinders following the lead-in trials for IW and the control participants. A greater application of force for the large object than the small object would be evidence of the utilization of volume cues in guiding fingertip forces. Error bars show average control group SE.
Material-Weight Illusion
Before lifting, and based on visual appearance alone, IW reported that he expected the polystyrene cube to be the lightest of the three objects and that he expected the wooden and stone cubes to weigh the same amount as one another. When lifting the cubes and judging their weight, IW reported that the polystyrene cube felt slightly heavier than the wooden cube, which in turn felt slightly heavier than the stone cube. On a trial-by-trial basis, however, he only reported that the polystyrene cube outweighed the stone cube in 4 of 10 instances. To examine whether IW's perception of the magnitude of the MWI differed from that experienced by our control sample, we calculated a metric of the MWI by subtracting the average ratings given to the stone cube from the average ratings given to the polystyrene cube. We then compared the magnitude of the illusion experienced by IW and the control group with the same Crawford's statistical procedure outlined above, finding no difference [0.49 vs. 0.29; t(7) = 0.29, P = 0.79].
In terms of the initial fingertip force application in this experiment, we first confirmed IW did not grip and lift these objects with inappropriately low or high force rates by comparing IW's average first-trial forces with those of the control group using Crawford's t-tests. One control participant was excluded from these analyses due to levels of sensorimotor prediction lower than 2 SD above or below the mean, leaving a sample of 6 controls. No differences between IW and the control group were observed in terms of grip force rate [40.2 vs. 82.1 N; t(5) = 1.0, P = 0.36] or lift force rate [15.0 vs. 28.1 N; t(5) = 1.0, P = 0.35]. IW's forces and force rates for his initial lifts of each object are presented in Fig. 6.
Fig. 6.

Grip force (A), load force (B), grip force rates (C), and load force rates (D) used by IW to initially lift the wood, polystyrene, and stone cubes. The arrows indicate the peak values used for the analysis of sensorimotor prediction, shown in Fig. 7.
In terms of initial sensorimotor prediction based on visual material cues, our control sample gripped the MWI-inducing cubes with force rates that reflected their material properties such that the heaviest-looking cube was gripped at a higher rate of force than the lightest-looking cube (see also Buckingham et al. 2009, 2011b, 2015a; Buckingham and Goodale 2013). IW, by contrast, showed no evidence that visual material cues influenced his initial fingertip forces (Fig. 7).
Fig. 7.
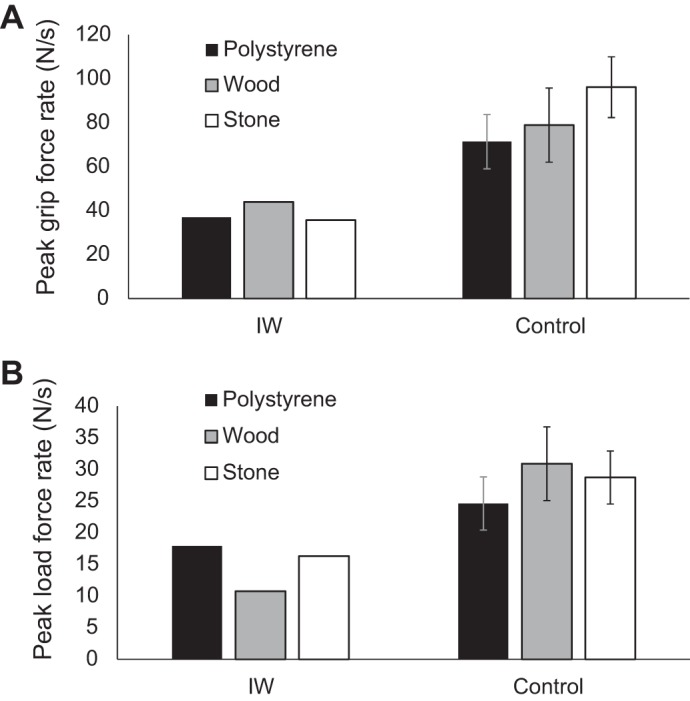
Peak grip force rates (A) and peak load force rates (B) used during the initial lift of the identically weighted polystyrene, wood, and stone cubes following the lead-in trials for IW and the control participants. A greater application of force for the stone cube than the other objects would be evidence of the utilization of material cues in guiding fingertip forces. Error bars show average control group SE.
However, when comparing IW's level of sensorimotor prediction with that of the control group, we observed no statistical difference in this measure [−1.3 vs. 24.8 N; t(5) = 1.25, P = 0.27], presumably due to the high level of variability in the control group's sensorimotor prediction. Interestingly, as was the case with IW, we found no evidence that material cues influenced the control sample's load force rates, and thus no difference in lift force rate sensorimotor prediction [−1.6 vs. 4.1 N; t(5) = 0.36, P = 0.73; Fig. 5].
Fig. 5.
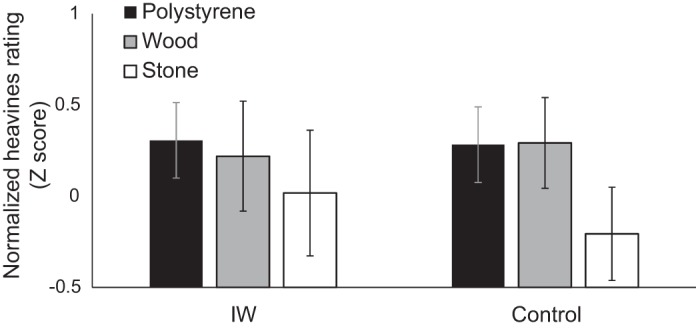
Average normalized heaviness ratings given across the 10 lifts of the identically weighted polystyrene, wood, and stone cubes following the lead-in trials. Error bars at left and right show IW's SE and the average control group SE.
DISCUSSION
In the current work, we examined how an individual with long-term peripheral sensory deafferentation but intact motoric output interacted with and perceived the weight of a variety of stimuli that varied in mass, volume, and surface material. Before lifting objects, IW showed intact cognitive expectations about how heavy he thought each of the objects would be in relation to one another to such a degree that he (correctly) assumed that the stone cube was “imitation granite” rather than a solid block of stone.
In terms of his perceptual abilities, we replicated earlier work showing that, with full vision, IW was able to discriminate between objects that actually varied in weight to approximately the same degree as a small group of age-matched controls (Cole and Sedgwick 1992). By contrast, he did not appear to experience SWI or MWI; his perceptual judgments of object heaviness were largely unaffected by visual cues to volume or material properties. This finding stands in stark contrast to multiple studies showing how size and material cues can influence the conscious perception of object weight in a wide range of special populations (Buckingham et al. 2015a, 2015b; Ellis and Lederman 1993; Li et al. 2011; Rabe et al. 2009). Indeed, to our knowledge, this is only the second reported example in a clinical context of an individual who does not report experiencing the SWI, the other being an individual with a large lesion to the left parietal lobe who does not experience SWI when lifting with his ipsi-lesional hand (Li et al. 2007). This dissociation between the ability to detect real and illusory weight differences is, to our knowledge, a novel finding which provides the first indication that the mechanisms underpinning weight illusions may be fundamentally different to those underpinning normal weight perception, a proposition in line with neuroimaging work showing left ventral premotor adaptation to manipulations of illusory, but not real, object mass (Chouinard et al. 2009).
Whereas unimpaired individuals lift heavy-looking objects at a higher rate of force than objects that they expect to feel lighter (Baugh et al. 2012; Buckingham et al. 2009; Gordon et al. 1991), IW showed no such tendency in the context of either size of material cues, despite being able to appropriately rank order the objects in terms of expected weight prior to lifting. Although his levels of sensorimotor prediction did not differ from those of our control sample, we find this lack of feedforward behavior particularly surprising in an individual who, presumably, would seem to be particularly reliant on visual cues. In other words, given the role visual supervision plays controlling all his actions, one might expect IW to show a very strong tendency to rely on vision when planning actions. Of course, given his reliance on vision, it might be possible that IW lifts objects in a qualitatively different way than unimpaired individuals. However, as can be seen in Figs. 3 and 6, his force profiles over the initial trials evolve over a sufficiently short time course to suggest a predictive element in his lifting behavior, an observation confirmed by the fact that his overall force rates are not significantly lower than those of unimpaired controls. However, his failure to use visual cues to guide his fingertip forces is particularly surprising because there is no a priori reason why haptic feedback should affect this feedforward process, which must be driven by a visual analysis of the object's properties on the initial interaction. It is possible that IW shows a strong tendency for hysteresis-like effects, seen when individuals lift objects that have no viable cues to mass (Chouinard et al. 2005; Loh et al. 2010), or a constant “safe” range of grip and load force values to interact with all objects (see below). Regardless of the mechanism, the fact that IW is unable (or unwilling) to use size or material cues to guide his fingertip forces when lifting novel objects for the first time highlights that these initial action parameters should not be taken as a proxy for cognitive expectations (Chang et al. 2008; Cole 2008).
Given the single-case nature of the current investigation and the length of time that has elapsed since IW's initial pathology, the current findings do not allow us to make strong claims about the way in which various cues are combined in unimpaired populations. However, in addition to providing a valuable addition to the ongoing case description of patient IW, the current work adds to the debate on what might cause the SWI and MWI. For example, our findings could be taken as evidence that an intact tactile/proprioception system is necessary to experience the SWI and MWI, indicating that these effects must stem from low-level, peripheral mechanisms. However, such a conclusion would appear to be at odds with the large body of work showing that the time course of the illusion is distinct from the rapidly changing afferent feedback gained from lifting over repeated trials (Buckingham et al. 2009; Flanagan and Beltzner 2000; Grandy and Westwood 2006). Furthermore, peripheral explanations of the illusions are difficult to reconcile with work showing the high-level nature of these effects, such as demonstrations that manipulating an individual's expectations of objects weight is sufficient to influence how heavy an object feels when it is lifted (Buckingham and Goodale 2010a; Buckingham et al. 2011b; Flanagan et al. 2008). Instead, we propose that IW does not use an adaptive forward model. An adaptive forward model is a concept put forward to reconcile the rapidity with which we undertake actions with the delay associated with sensory conductance. In short, it is thought likely that a typical sensorimotor repertoire involves a large degree of prediction, which is modified as we learn the dynamical properties of objects in the world, underpinned by a model that includes relevant properties of objects with which we interact. This hypothetical model not only allows movements to be completed more rapidly than they would if guided by online feedback, but also allows one to determine whether the motor command yielded the desired results (for review, see Flanagan and Johansson 2011). A lack of such a forward model in IW explains both the perceptual and sensorimotor prediction findings: he would have no means to use size or material cues to guide his fingertip force rates when lifting novel objects, nor would he have his perceptions of object weight influenced by his prior expectations. This conclusion fits well with what is known about the parameterization of fingertip forces in the context of object lifting: individuals typically prepare to lift objects in a predictive manner using either information provided by visual cues to weight or, if such information is unavailable, by the forces utilized in the previous lift (Baugh et al. 2012; Forssberg et al. 1992; Loh et al. 2010). Studies showing that IW modulated grip forces in response to self-generated dynamic changes in load force suggest he can operate in a predictive fashion (Hermsdörfer et al. 2008), and he appears to use a forward model when engaged in a mirror drawing task (Miall and Cole 2007). In the present study, however, there is no evidence that he engages in sensorimotor prediction based on external cues. Also, although there is still some debate over exactly what information is used to drive the prediction underpinning the context of perception (Buckingham 2014), there seems little doubt that analogous cognitive feedforward processes drive the conscious perception of object heaviness in these weight-illusion paradigms (Flanagan et al. 2008). Given that IW does not appear to experience weight illusions or apply forces in a predictive fashion, it is possible that he does not utilize a forward model when interacting with objects in the world around him, presumably due to his inability to use tactile/proprioceptive cues to adequately calibrate his forward model. Instead, IW appeared to initially use similar forces for all the objects he lifted, which is consistent with earlier work showing that his strategy for distinguishing light from heavy objects is to lift all objects with approximately the same force and judge their weight on the basis of their visual kinematics (Cole and Sedgwick 1992). This strategy would, of course, yield accurate and nonillusory perception of object weight. Thus IW's lack of illusion could be considered as a (somewhat paradoxical) enhanced perceptual skill, rather than a deficit in weight perception. Of course, because of the chronic nature of IW's condition, the current work cannot shed light on whether this apparent change in the use of forward models is a natural consequence of losing haptic cues or is specific to IW's reliance on visual feedback to control his actions. Future work can distinguish between these possible interpretations by examining the time course of any change in sensorimotor prediction following a transient sensory impairment, such as muscle vibration or the application of aesthetic to the digits.
DISCLOSURES
No conflicts of interest, financial or otherwise, are declared by the authors.
AUTHOR CONTRIBUTIONS
G.B. and J.C. conception and design of research; G.B., E.E.M., and J.C. performed experiments; G.B. and E.E.M. analyzed data; G.B. and J.C. interpreted results of experiments; G.B. prepared figures; G.B. drafted manuscript; G.B., E.E.M., and J.C. edited and revised manuscript; G.B., E.E.M., and J.C. approved final version of manuscript.
ACKNOWLEDGMENTS
We thank IW for his patience and good humor throughout testing, and we also thank his family for their hospitality. In addition, we thank three anonymous reviewers for comments on an earlier draft of this manuscript.
REFERENCES
- Baugh LA, Kao M, Johansson RS, Flanagan JR. Material evidence: interaction of well-learned priors and sensorimotor memory when lifting objects. J Neurophysiol 108: 1262–1269, 2012. [DOI] [PubMed] [Google Scholar]
- Buckingham G. Getting a grip on heaviness perception: a review of weight illusions and their probable causes. Exp Brain Res 232: 1623–1629, 2014. [DOI] [PubMed] [Google Scholar]
- Buckingham G, Bieńkiewicz M, Rohrbach N, Hermsdörfer J. The impact of unilateral brain damage on weight perception, sensorimotor anticipation, and fingertip force adaptation. Vision Res 115: 231–237, 2015a. [DOI] [PubMed] [Google Scholar]
- Buckingham G, Byrne CM, Paciocco J, van Eimeren L, Goodale MA. Weightlifting exercise and the size-weight illusion. Atten Percept Psychophys 76: 452–459, 2014. [DOI] [PubMed] [Google Scholar]
- Buckingham G, Cant JS, Goodale MA. Living in a material world: how visual cues to material properties affect the way that we lift objects and perceive their weight. J Neurophysiol 102: 3111–3118, 2009. [DOI] [PubMed] [Google Scholar]
- Buckingham G, Goodale MA. Lifting without seeing: the role of vision in perceiving and acting upon the size weight illusion. PLoS One 5: e9709, 2010a. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Buckingham G, Goodale MA. The influence of competing perceptual and motor priors in the context of the size-weight illusion. Exp Brain Res 205: 283–288, 2010b. [DOI] [PubMed] [Google Scholar]
- Buckingham G, Goodale MA. Size matters: a single representation underlies our perceptions of heaviness in the size-weight illusion. PLoS One 8: e54709, 2013. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Buckingham G, Milne JL, Byrne CM, Goodale MA. The size-weight illusion induced through human echolocation. Psychol Sci 26: 237–242, 2015b. [DOI] [PubMed] [Google Scholar]
- Buckingham G, Ranger NS, Goodale MA. The role of vision in detecting and correcting fingertip force errors during object lifting. J Vis 11: 4, 2011a. [DOI] [PubMed] [Google Scholar]
- Buckingham G, Ranger NS, Goodale MA. The material-weight illusion induced by expectations alone. Atten Percept Psychophys 73: 36–41, 2011b. [DOI] [PubMed] [Google Scholar]
- Buckingham G, Ranger NS, Goodale MA. Handedness, laterality and the size-weight illusion. Cortex 48: 1342–1350, 2012. [DOI] [PubMed] [Google Scholar]
- Chang E, Flanagan JR, Goodale MA. The intermanual transfer of anticipatory force control in precision grip lifting is not influenced by the perception of weight. Exp Brain Res 185: 319–329, 2008. [DOI] [PubMed] [Google Scholar]
- Charpentier A. Analyse expérimentale quelques éléments de la sensation de poids. Arch Physiol Norm Pathol 3: 122–135, 1891. [Google Scholar]
- Chouinard PA, Large M, Chang E, Goodale M. Dissociable neural mechanisms for determining the perceived heaviness of objects and the predicted weight of objects during lifting: an fMRI investigation of the size-weight illusion. Neuroimage 44: 200–212, 2009. [DOI] [PubMed] [Google Scholar]
- Chouinard PA, Leonard G, Paus T. Role of the primary motor and dorsal premotor cortices in the anticipation of forces during object lifting. J Neurosci 25: 2277–2284, 2005. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Cole J, Paillard J. Living without touch and peripheral information about body position and movement: studies with deafferented subjects. In: The Body and the Self, edited by Bermudez JL, Marcel AJ, Eilan NM. Cambridge, MA: MIT Press, 1995, p. 245–266. [Google Scholar]
- Cole JD, Sedgwick EM. The perceptions of force and of movement in a man without large myelinated sensory afferents below the neck. J Physiol 449: 503–515, 1992. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Cole KJ. Lifting a familiar object: visual size analysis, not memory for object weight, scales lift force. Exp Brain Res 188: 551–557, 2008. [DOI] [PubMed] [Google Scholar]
- Crawford JR, Garthwaite PH, Porter S. Point and interval estimates of effect sizes for the case-controls design in neuropsychology: rationale, methods, implementations, and proposed reporting standards. Cogn Neuropsychol 27: 245–260, 2010. [DOI] [PubMed] [Google Scholar]
- Drewing K, Ernst MO. Integration of force and position cues for shape perception through active touch. Brain Res 1078: 92–100, 2006. [DOI] [PubMed] [Google Scholar]
- Ellis RR, Lederman SJ. The role of haptic versus visual volume cues in the size-weight illusion. Percept Psychophys 53: 315–324, 1993. [DOI] [PubMed] [Google Scholar]
- Ellis RR, Lederman SJ. The material-weight illusion revisited. Percept Psychophys 61: 1564–1576, 1999. [DOI] [PubMed] [Google Scholar]
- Ernst MO. Perceptual learning: inverting the size-weight illusion. Curr Biol 19: R23–R25, 2009. [DOI] [PubMed] [Google Scholar]
- Flanagan JR, Bandomir CA. Coming to grips with weight perception: effects of grasp configuration on perceived heaviness. Percept Psychophys 62: 1204–1219, 2000. [DOI] [PubMed] [Google Scholar]
- Flanagan JR, Beltzner MA. Independence of perceptual and sensorimotor predictions in the size-weight illusion. Nat Neurosci 3: 737–741, 2000. [DOI] [PubMed] [Google Scholar]
- Flanagan JR, Bittner JP, Johansson RS. Experience can change distinct size-weight priors engaged in lifting objects and judging their weights. Curr Biol 18: 1742–1747, 2008. [DOI] [PubMed] [Google Scholar]
- Flanagan JR, Johansson RS. Object representations used in action and perception. In: Motor Control: Theories, Experiments, and Applications, edited by Danion F, Latash M. Oxford: Oxford University Press, 2011, p. 30–49. [Google Scholar]
- Fleury M, Bard C, Teasdale N, Paillard J, Cole J, Lajoie Y, Lamarre Y. Weight judgment. The discrimination capacity of a deafferented subject. Brain 118: 1149–1156, 1995. [DOI] [PubMed] [Google Scholar]
- Forssberg H, Kinoshita H, Eliasson AC, Johansson RS, Westling G, Gordon AM. Development of human precision grip. II. Anticipatory control of isometric forces targeted for object's weight. Exp Brain Res 90: 393–398, 1992. [DOI] [PubMed] [Google Scholar]
- Gordon AM, Forssberg H, Johansson RS, Westling G. Visual size cues in the programming of manipulative forces during precision grip. Exp Brain Res 83: 477–482, 1991. [DOI] [PubMed] [Google Scholar]
- Grandy MS, Westwood DA. Opposite perceptual and sensorimotor responses to a size-weight illusion. J Neurophysiol 95: 3887–3892, 2006. [DOI] [PubMed] [Google Scholar]
- Hermsdörfer J, Elias Z, Cole JD, Quaney BM, Nowak DA. Preserved and impaired aspects of feed-forward grip force control after chronic somatosensory deafferentation. Neurorehabil Neural Repair 22: 374–384, 2008. [DOI] [PubMed] [Google Scholar]
- Johansson RS, Flanagan JR. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat Rev Neurosci 10: 345–359, 2009. [DOI] [PubMed] [Google Scholar]
- Lederman SJ, Klatzky RL. Haptic perception: a tutorial. Atten Percept Psychophys 71: 1439–1459, 2009. [DOI] [PubMed] [Google Scholar]
- Li Y, Randerath J, Goldenberg G, Hermsdörfer J. Grip forces isolated from knowledge about object properties following a left parietal lesion. Neurosci Lett 426: 187–191, 2007. [DOI] [PubMed] [Google Scholar]
- Li Y, Randerath J, Goldenberg G, Hermsdörfer J. Size-weight illusion and anticipatory grip force scaling following unilateral cortical brain lesion. Neuropsychologia 49: 914–923, 2011. [DOI] [PubMed] [Google Scholar]
- Loh MN, Kirsch L, Rothwell JC, Lemon RN, Davare M. Information about the weight of grasped objects from vision and internal models interacts within the primary motor cortex. J Neurosci 30: 6984–6990, 2010. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Miall RC, Cole J. Evidence for stronger visuo-motor than visuo-proprioceptive conflict during mirror drawing performed by a deafferented subject and control subjects. Exp Brain Res 176: 432–439, 2007. [DOI] [PubMed] [Google Scholar]
- Miall RC, Ingram HA, Cole JD, Gauthier GM. Weight estimation in a “deafferented” man and in control subjects: are judgements influenced by peripheral or central signals? Exp Brain Res 133: 491–500, 2000. [DOI] [PubMed] [Google Scholar]
- Mon-Williams M, Murray AH. The size of the visual size cue used for programming manipulative forces during precision grip. Exp Brain Res 135: 405–410, 2000. [DOI] [PubMed] [Google Scholar]
- Nicolas S, Ross HE, Murray DJ. Charpentier's papers of 1886 and 1891 on weight perception and the size-weight illusion. Percept Mot Skills 115: 120–141, 2012. [DOI] [PubMed] [Google Scholar]
- Rabe K, Brandauer B, Li Y, Gizewski ER, Timmann D, Hermsdörfer J. Size-weight illusion, anticipation, and adaptation of fingertip forces in patients with cerebellar degeneration. J Neurophysiol 101: 569–579, 2009. [DOI] [PubMed] [Google Scholar]
- Rao AK, Gordon AM. Contribution of tactile information to accuracy in pointing movements. Exp Brain Res 138: 438–445, 2001. [DOI] [PubMed] [Google Scholar]
- Schenk T. No dissociation between perception and action in patient DF when haptic feedback is withdrawn. J Neurosci 32: 2013–2017, 2012. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Seashore CE. Some psychological statistics. II. The material weight illusion. Univ Iowa Stud Psychol: 36–46, 1899.
- Whitwell RL, Buckingham G. Reframing the action and perception dissociation in DF: haptics matters, but how? J Neurophysiol 109: 621–624, 2013. [DOI] [PubMed] [Google Scholar]
- Zwislocki JJ, Goodman DA. Absolute scaling of sensory magnitudes: a validation. Percept Psychophys 28: 28–38, 1980. [DOI] [PubMed] [Google Scholar]