

Abstract
Recent studies of human mobility largely focus on displacements patterns and power law fits of empirical long-tailed distributions of distances are usually associated to scale-free superdiffusive random walks called Lévy flights. However, drawing conclusions about a complex system from a fit, without any further knowledge of the underlying dynamics, might lead to erroneous interpretations. Here we show, on the basis of a data set describing the trajectories of 780,000 private vehicles in Italy, that the Lévy flight model cannot explain the behaviour of travel times and speeds. We therefore introduce a class of accelerated random walks, validated by empirical observations, where the velocity changes due to acceleration kicks at random times. Combining this mechanism with an exponentially decaying distribution of travel times leads to a short-tailed distribution of distances which could indeed be mistaken with a truncated power law. These results illustrate the limits of purely descriptive models and provide a mechanistic view of mobility.
 Many human mobility studies have shown empirically long-tailed distance distributions, which are usually associated to Lévy flights. Here, the authors show that the behavior of private vehicles could be misinterpreted as Lévy flights but is fully captured by a class of accelerated random walks.
Many human mobility studies have shown empirically long-tailed distance distributions, which are usually associated to Lévy flights. Here, the authors show that the behavior of private vehicles could be misinterpreted as Lévy flights but is fully captured by a class of accelerated random walks.
Understanding individual mobility has important implications for traffic forecasting1, epidemics spreading2,3 or the evolution of cities4,5,6. With the development of Information and Communication Technologies7, the investigations' focus shifted from the traditional travel diary surveys8,9,10 to several new data sources. In particular, it became possible to follow individual trajectories from mobile phone calls11,12,13, location-sharing services14,15,16 and microblogging17, or directly extracted from public transport ticketing system10,18, global positioning system (GPS) tracks of taxis10,19,20,21,22,23, private cars24,25,26 or single individuals27,28. For most data sources, the spatial position r is the most reliable quantity. This information can be used for studying two different aspects of human mobility: how far and where we are moving. The second question is far more complex than the first and can be approached with several different tools, from aggregated origin–destination matrices29 for mobility prediction30 or land use analysis31 to individual mobility networks and patterns suitable for describing the natural tendency to return frequently to a few locations (such as homes, offices and so on)11,12,24,25,26,32. On the other hand, the first question, generally characterized by the distribution P(Δr) of the individuals' displacements Δr across all users, although apparently simple is still far from being completely understood. Indeed, even if the study of the distribution P(Δr) has become a trademark for recent works on human mobility, there are still no consensus about the functional form of this distribution. At a large scale (national or inter-urban), one may observe a long tail behaviour9,11,12,14,15,17,20,22,33 characterized by a power law decay for long displacements. At a smaller (urban) scale, the distribution seems to have an exponential tail10,13,19,21,22,24,25. The unclear nature of this probability distribution makes its interpretation difficult and dependent on the data set used, the scale and possible empirical and fitting errors34. It is therefore necessary to obtain data as clean as possible and to propose a model that can be tested against empirical results. So far, essentially power law fits were used and led the authors to draw conclusions about the nature and mechanisms of the mobility, but this way of proceeding could actually lead to erroneous conclusions. Similar unresolved controversy also exists in the study of animal's foraging movements: relying only on a fit of the empirical data, the same distribution can be understood in different ways, leading to contrasting conclusions on the nature of the underlying process35, 36, 37, 38.
Remarkably enough, what appears to be under-evaluated in the study of human mobility is the relevance of travel itself. Human travelling behaviour can in general be described as a sequence of rest times of duration  and jumps Δr in space12. These two processes need to be separated for modelling human mobility, since costs are in general associated to trips while a positive utility can be associated to activities performed during stops1. However, proposed models usually neglect the role of travel time and the moving velocity and assume instantaneous jumps. This is essentially a consequence of the limitations inherent to data sources: phone calls or social networks capture the spatial character of individuals' movements39, but are limited by sampling rates or by the bursty nature of human communications40,41 and are thus not suitable for an exhaustive temporal description of human mobility.
and jumps Δr in space12. These two processes need to be separated for modelling human mobility, since costs are in general associated to trips while a positive utility can be associated to activities performed during stops1. However, proposed models usually neglect the role of travel time and the moving velocity and assume instantaneous jumps. This is essentially a consequence of the limitations inherent to data sources: phone calls or social networks capture the spatial character of individuals' movements39, but are limited by sampling rates or by the bursty nature of human communications40,41 and are thus not suitable for an exhaustive temporal description of human mobility.
In this paper, we show that the observed truncated power laws in the jump size distribution can be the consequence of simple processes such as random walks with random velocities42. We test this model over a large GPS database describing the mobility of 780,000 private vehicles in Italy, where travels and pauses can be easily separated, as the transition is identified by the moment when the engine is turned on or off (but we introduce a lower threshold of 5 min in the elapsed time, to distinguish real stops from accidentally switched off of the engine during a trip). This allows us to evaluate accurately not only the displacements Δr, but also travel times t, speeds v and rest times  .
.
Results
The current empirical view
Several studies suggested that the displacements' distribution P(Δr) has a fat tail, and power law fits display a wide range of exponent values depending on the data set and the fitting form used (see Table 1). We note that, strictly speaking, the distribution cannot be scale-free since displacements are always limited in space43. Thus, human movements could possibly be identified as truncated Lévy flights only11,44. In contrast, displacements at the urban scale consistently display an exponential tail19,24,25. Short tails also emerge when studying the distribution P(t) of travel times t of individual trajectories originating in different cities. For private cars' mobility, as in the data set studied here, we observe that P(t) is indeed characterized by an exponential decay  as in refs 9, 19, 28, 45 (see Fig. 1), where
as in refs 9, 19, 28, 45 (see Fig. 1), where  is the average travel time that may vary among cities (see Supplementary Note 1 and Supplementary Fig. 1). For public transportation, we also observe a rapidly decreasing tail for the travel times between metro stations (see ref. 18 and Supplementary Fig. 2). A short tail is expected for these distributions, since the total daily travel time spent in public46 or private transportation45 has an exponential tail (see Supplementary Note 1 and Supplementary Fig. 3 for the analysis of the distribution P(
is the average travel time that may vary among cities (see Supplementary Note 1 and Supplementary Fig. 1). For public transportation, we also observe a rapidly decreasing tail for the travel times between metro stations (see ref. 18 and Supplementary Fig. 2). A short tail is expected for these distributions, since the total daily travel time spent in public46 or private transportation45 has an exponential tail (see Supplementary Note 1 and Supplementary Fig. 3 for the analysis of the distribution P( ) of rest times
) of rest times  ).
).
Table 1. Parameter values for the fit of the displacement distribution with a truncated power law found in previous studies.
| Data source | Trajectories | β | κ | Δr0 |
|---|---|---|---|---|
| Dollar bills33 | 464 K | 1.59 | ∞ | 0 |
| Mobile phones11 | 100 K | 1.75 | 400 km | 1.5 km |
| Mobile phones11 | 206 | 1.75 | 80 km | 1.5 km |
| Mobile phones12 | 3 M | 1.55 | 100 km | 0 |
| Location sharing14 | 220 K | 1.88 | ∞ | 0 |
| GPS tracks27 | 101 | [1.16,1.82] | ∞ | 0 |
| Location sharing15 | 900 K | 1.50 | ∞ | 2.87 km |
| Location sharing15 | 900 K | 4.67 | ∞ | 18.42 km |
| Taxis19 | 12 K | 0 | 4.29 km | — |
| Taxis20 | 7 K | 1.2 | 10 km | 0.31 km |
| Mobile phones13 | 3 M | 0 | [2, 5.8] km | — |
| Travel diaries9 | 230 | 1.05 | 50 km | 0 |
| Tweets17 | 13 M | 1.62 | ∞ | 0 |
| Location sharing16 | 521 K | 0 | 300 km | — |
| Taxis21 | 34 K | 0 | [2, 4.6] km | — |
| Taxis23 | 1,100 | [0.50, 1.17] | [4.5, 6.5] km | 0 |
This list includes studies on different data sources and spatial or temporal scales. Only fits consistent with the function  proposed in ref. 11 are presented here. The case κ=∞ is associated to non-truncated power laws, while β=0 to exponential distributions. When Δr0=0 this parameter was omitted in the fit, and we set β=0 when this value is not defined. Further studies propose: (i) a polynomial form close to an exponential behaviour for private cars24; (ii) two different behaviours for urban and inter-urban trajectories for cars and taxis22,25; and (iii) a lognormal distribution for individual GPS tracks28.
proposed in ref. 11 are presented here. The case κ=∞ is associated to non-truncated power laws, while β=0 to exponential distributions. When Δr0=0 this parameter was omitted in the fit, and we set β=0 when this value is not defined. Further studies propose: (i) a polynomial form close to an exponential behaviour for private cars24; (ii) two different behaviours for urban and inter-urban trajectories for cars and taxis22,25; and (iii) a lognormal distribution for individual GPS tracks28.
Figure 1. Travel time distribution in the six largest Italian cities.

The probability distribution P(t) is well fitted by an exponential function. As demonstrated by the data collapse shown here, differences among cities are encoded in a single parameter: the average travel time  .
.
We have therefore ambiguous empirical results and purely descriptive models, leading to a very unclear view of human mobility. Here we investigate the statistics of displacements starting from simple assumptions about the dynamics that governs mobility. In contrast with empirical and descriptive approaches, we start by modelling this mechanism and show that our predictions are consistent with data. To model mobility, we must understand the relationship between the duration of a trip and its average velocity. Velocity is a natural quantity for describing the mobility, and classical traffic modelling focuses on predicting its average value in freeways or in cities with different vehicle's densities47. The relevance of velocity appears to be underestimated in recent studies even when the hierarchy of transportation networks is suggested to be at the origin of the fat tail48. As discussed above, this omission is a consequence of data sources limitations. To go beyond descriptive approaches, it is necessary to obtain richer data such as the large GPS database used here.
Random uncorrelated accelerations
A first remark is that apparent truncated power laws can result from interrupting at random times simple processes49 such as random walks in the velocity space. To illustrate the problem with this simple approach, we consider the evolution of the velocity v described by a Brownian motion with diffusion coefficient D
 |
where θ is time and ξ is a white noise. This random acceleration model has been the subject of many theoretical studies (see ref. 50 and references therein) and provides here an interesting null model. We define the displacement for a given time time t as  where >0 is the average velocity. To compute the displacement distribution, we use the fact that
where >0 is the average velocity. To compute the displacement distribution, we use the fact that  is a Gaussian variable and that the travel time distribution is approximatively exponential
is a Gaussian variable and that the travel time distribution is approximatively exponential  . Using a saddle-point approximation (see Supplementary methods), we obtain a stretched exponential distribution for large displacements
. Using a saddle-point approximation (see Supplementary methods), we obtain a stretched exponential distribution for large displacements
 |
with γ=3/4, δ=1/2 and C a free parameter. We show in Supplementary Fig. 4(a) the best fit with C=0.49 km−0.5. At this stage, this model offers an already reasonable description of the empirical pattern usually described by a truncated power law with three parameters11 which results here from the combination of a random walk and a random duration model. In addition, this simple random model (equation (1)) implies a relation51 between the travel time t and the average velocity modulus of the form  ∝t1/2. However, for both private cars (see Fig. 2) and public transportation (see Supplementary Fig. 5(a) and Supplementary Note 2), we find that average speed grows linearly with the travel time. This important empirical observation invalidates our first simple model (which might still be relevant for describing different mobility patterns, such those of animals52) and one has to understand the origin of this uniform acceleration. Our idea here is that this behaviour results from the optimal use of the hierarchical nature of the transportation networks for longer trips. Indeed, it is likely that faster transportation modes or faster roads are used more frequently for longer trajectories25,53. In the following, we propose a stochastic model based on this idea, which correctly predicts both travel speed and displacement distributions.
∝t1/2. However, for both private cars (see Fig. 2) and public transportation (see Supplementary Fig. 5(a) and Supplementary Note 2), we find that average speed grows linearly with the travel time. This important empirical observation invalidates our first simple model (which might still be relevant for describing different mobility patterns, such those of animals52) and one has to understand the origin of this uniform acceleration. Our idea here is that this behaviour results from the optimal use of the hierarchical nature of the transportation networks for longer trips. Indeed, it is likely that faster transportation modes or faster roads are used more frequently for longer trajectories25,53. In the following, we propose a stochastic model based on this idea, which correctly predicts both travel speed and displacement distributions.
Figure 2. Acceleration of private transportation.

Empirical average speeds (blue dots) versus the duration of the trip for our GPS data set. The red solid line represents a constant average acceleration  =v0+at with v0=17.9 km h−1 and a=16.7 km h−2. For t>2 h the speed reaches a saturation at
=v0+at with v0=17.9 km h−1 and a=16.7 km h−2. For t>2 h the speed reaches a saturation at  ≈55 km h−1 imposed by the finite number of layers (see Methods section and Supplementary information). The dashed line represents the best fit with
≈55 km h−1 imposed by the finite number of layers (see Methods section and Supplementary information). The dashed line represents the best fit with  ∝t1/2 (as predicted by the simple random model equation (1) with uncorrelated accelerations).
∝t1/2 (as predicted by the simple random model equation (1) with uncorrelated accelerations).
Random acceleration kicks
In contrast with the assumption underlying equation (2), accelerations are not uncorrelated: in Fig. 3a, we indeed observe that an average trip can be separated into a first half where one uses progressively faster roads and a second half with deceleration until the velocity reaches back the base speed at time t. We use this simple representation in a stochastic model (see the schematic in Fig. 3b) and make the following assumptions. The transportation network is modelled by n layers Ln, corresponding to different travel speeds vn (we neglect saturation effects, see Methods section and Supplementary methods). The speed differences between layers are taken constant and equal to δv, and the speed on layer Lk is then vk=v0+kδv. An individual starts then her trip of duration t in the layer L0 with base speed v0, and we assume that there are two phases in a trip, acceleration and deceleration, of roughly the same duration. In both the ascending and descending phases, we define a Poissonian process where all individuals have the same probability per unit time p to jump to the successive layer and to change their speed.
Figure 3. Empirical evidence and schematic representation of the model.

(a) We compute for different trips the empirical average free-flow speeds 〈vfree〉 for the used roads, measured in the absence of congestion (see Methods section). We then aggregate the trips according to their duration t, and we plot the evolution of the relative average free-flow speed 〈vfree〉/〈vfree〉max, where 〈vfree〉max is the maximal average free-flow speed reached at θ≈t/2. We observe symmetrical curves with a progressive increase of velocity in the first half of the trip, a short flat central part followed by a deceleration. The curves do not collapse, since longer trips have a larger fraction of their trajectory spent at a maximal speed. The maximal speed 〈vfree〉max is reached at the middle of the trip and increases from 79 km h−1 for trips with a duration t=0.5 h to 106 km h−1 for a duration of t=1.5 h. (b) Schematic representation of the random acceleration model (equation (3)). Each trajectory starts with an acceleration phase, where the speed increases by constant kicks equal to δv. These kicks happen at random times with an uniform probability per unit time p. When approaching the destination, there is a deceleration phase with random kicks of −δv (with the same probability p). The symmetry of the problem implies that the maximal speed vm is reached on average at tm=t/2 and depends on δv and p: vm=v0+k(tm)δv, where k(θ) is the number of kicks after a time θ and follows a Poisson distribution of average 〈k(θ)〉=pθ. The average speed  of the trajectory is evaluated by estimating the shaded area and leads to
of the trajectory is evaluated by estimating the shaded area and leads to  =(v0+vm)/2.
=(v0+vm)/2.
Within this model, we can estimate the maximal speed vm=v0+k(tm)δv, where k(tm) is the number of jumps at mid trajectory tm=t/2, and get approximatively the average speed  ≈(v0+vm)/2. Since the process is Poissonian, we have 〈k(tm)〉=ptm and the average speed is given by
≈(v0+vm)/2. Since the process is Poissonian, we have 〈k(tm)〉=ptm and the average speed is given by
 |
where the brackets denote the average over the Poisson variable k. The average speed thus grows linearly with t, in agreement with empirical observations. Remarkably enough, this model allows us to predict also the shape of the conditional probability distribution  . Indeed, the number of jumps k is distributed following the Poisson distribution
. Indeed, the number of jumps k is distributed following the Poisson distribution  with λ=pt/2. Using the Gamma function as the natural analytic continuation of the factorial k!=Γ(1+k), we obtain the distribution
with λ=pt/2. Using the Gamma function as the natural analytic continuation of the factorial k!=Γ(1+k), we obtain the distribution
 |
where p′=p/2 and δv′=δv/2 are free parameters fitted using empirical speeds (see Fig. 4). The shape of the displacement distribution P(Δr) can then be computed as a superimposition of Poisson distributions (see Supplementary Fig. 4(b)) and is given by
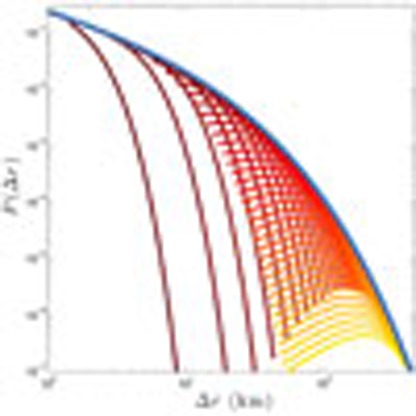
Figure 4. Conditional distribution  of the average speeds for different travel times.
of the average speeds for different travel times.

We fit simultaneously the curves  given by equation (4) in the interval [v0, vmax], with v0=17.9 km h−1 and vmax=130 km h−1 and for t=5, 10, 15, 20, …, 180 min (see Methods section). Each plot refers to a different trip durations (t=5, 15, 30, 60, 120, 180 min). The dots are the empirical data whereas the solid line is the fit obtained using equation (4). The best fit value of the parameters are p′=1.06 jumps per hour, δv′=20.9 km h−1 (and v0=17.9 km h−1). We therefore get δv≈40 km h−1 for the speed gap, in excellent agreement with the progression of the most common speed limits in Italy: 50 km h−1 (urban), 90 km h−1 (extra-urban) and 130 km h−1 (highways). These results suggest that a multilayer hierarchical transportation infrastructure can explain the constant acceleration observed in both public and private transportation.
given by equation (4) in the interval [v0, vmax], with v0=17.9 km h−1 and vmax=130 km h−1 and for t=5, 10, 15, 20, …, 180 min (see Methods section). Each plot refers to a different trip durations (t=5, 15, 30, 60, 120, 180 min). The dots are the empirical data whereas the solid line is the fit obtained using equation (4). The best fit value of the parameters are p′=1.06 jumps per hour, δv′=20.9 km h−1 (and v0=17.9 km h−1). We therefore get δv≈40 km h−1 for the speed gap, in excellent agreement with the progression of the most common speed limits in Italy: 50 km h−1 (urban), 90 km h−1 (extra-urban) and 130 km h−1 (highways). These results suggest that a multilayer hierarchical transportation infrastructure can explain the constant acceleration observed in both public and private transportation.
 |
where δ(x) is the Dirac delta function. This equation (5) is our main analytical result and its exact form cannot be exactly computed, but the limiting behaviour for large Δr is again equation (2) (see Supplementary methods). In particular, this distribution is not fat-tailed, in clear contrast with Lévy flights which have divergent moments and are governed by large fluctuations. Therefore, all phenomena associated to Lévy flights such as superdiffusion, for example, are not expected from our model. In Fig. 5, we compare the empirical P(Δr) with our prediction and show that the proposed random acceleration model (together with the exponential behaviour for P(t)) is in excellent agreement with data.
Figure 5. Displacements distribution.

We show (circles) the aggregated empirical distribution P(Δr) for all the ≈780,000 cars in the data set. The solid line is the model prediction (and not an a posteriori best fit) based on our model equation (5) with: (i) v0=17.9 km h−1 estimated as the intercept of the fit in Fig. 2; (ii) p′=1.06 jumps per hour and δv′=20.9 km h−1 estimated from the fit of  in Fig. 4; and (iii)
in Fig. 4; and (iii)  =0.30 h coming from the average of the travel times for all selected trips (see Methods section). This remarkable prediction has a quality comparable with the commonly used direct fits by a truncated power law with three free parameters (see Supplementary Fig. 4).
=0.30 h coming from the average of the travel times for all selected trips (see Methods section). This remarkable prediction has a quality comparable with the commonly used direct fits by a truncated power law with three free parameters (see Supplementary Fig. 4).
Discussion
The identification of an approximate power law behaviour of a complex system is rarely scientifically useful by itself43 but needs to be model-informed. Since multiple competing models can explain the same pattern40,41, it even risks to swamp future research with years of replicating the same, and possibly wrong, pattern analysis (see Table 1). Proposing models with simple, reasonable assumptions and processes can help in identifying the fundamental constituents of the problem, and provide predictions that can be tested and trigger future research and improvements. In the case of human mobility, the random acceleration model proposed here allows for a deeper quantitative understanding, leads to predictions in excellent agreement with data, and brings evidence that the long-standing interpretation with Lévy flights is incorrect. The central idea of our model is the existence of a hierarchical organization of transportation layers with different velocities. The main ingredients that describe the variability of P(Δr) among cities (see Supplementary Note 3 and Supplementary Fig. 6) are different travel times (Supplementary Fig. 1), the base speed, the speed gap between layers, and the effective acceleration (Supplementary Fig. 7), which is proportional to the jumping rate to a different layer. An important assumption in this model is that these quantities are constant, but this is not necessarily true. Deviations observed in empirical distributions at the urban level suggest the need for more elaborate velocity models, able to include spatial and temporal inhomogeneities of transportation systems by allowing v0, p and δv to vary across cities or during the day.
Methods
Private transportation data
We compute spatial displacements and travel times for private car transportation from a database of GPS measures sampling the trajectories of private vehicles in the whole Italy during the month of May 2011. The data are collected for insurance reasons by a device installed on the vehicles and are mainly related to private vehicles, since taxi cabs or delivery companies use their own GPS systems and do not contribute to it. A small percentage of vehicles belongs to private companies and are used for professional reasons. This database includes ≈2% of the vehicles registered in Italy, containing a total of 128,363,000 trips performed by 779,000 vehicles. Records contain information about the engine starts and stops, and travel times include the time spent looking for parking. We introduce a lower threshold of 5 min in the elapsed time to define the end of a trip and to distinguish real stops related to an activity. When the quality of the satellite signal is good, we have an average spatial accuracy of the order of 10 m, but during a trip, the error fluctuations may increase up to 30 m or more54. The error in temporal resolution is negligible.
We have applied correction and filtering procedures to exclude from our analysis data affected by systematic errors. Approximately 10% of the data were discarded for this reason. When the engine is switched on or when the vehicle is parked inside a building, there are errors due to signal loss. In such cases, we use the redundant information given by the previous stopping point to correct 20% of the data. When the engine was off for <30 s, the subsequent trajectory is always considered as a continuation of the same trip, except if the vehicle is going back towards the origin of the previous trajectory segment.
For privacy reasons, the drivers' city of residence is unknown. Therefore, it has been necessary to associate to each car an urban area using available information. We do that by identifying a driver as living in a certain city if the most part of its parking time is spent in the corresponding municipality area. For each driver we then consider all trips both within and outside this ‘residence' urban area.
Measuring the free-flow speed
Each trajectory is sampled at a spatial scale at most equal to 2 km or, in highways, at a time scale of 30 s. Using trajectory reconstructions55,56, we estimate for each road the average speed for all the trajectories passing through that road. Using the distribution of the travel speed, the free-flow speed of a road is defined as the speed corresponding to the 85% of percentile. As a matter of fact, the free-flow speed corresponds to trajectories carried out during the night and the choice of 85% of percentile takes into account the individual heterogeneity: in many cases there are individuals driving at a speed much larger than the average and that are neglected in the computation of an average free-flow speed.
In Fig. 3a, we have computed the free-flow velocity for the used roads in each trajectory and for different travel time durations (0.5±0.1 h, 1.0±0.1 h and 1.5±0.1 h).
Details of the model
The model proposed here assumes that urban mobility is performed at a baseline speed of v0≈18 km h−1. Very short trips hardly reach the base speed v0 that we impose in our model. For this reason, in all the measures proposed in this paper, we considered only trips longer than 1 km and with duration larger than 5 min.
The upper bound of 130 km h−1 limits the number of jumps to k=(130 km h−1−v0)/δv≈3. We have a jumping rate of order p′≈1 jump per hour and we expect significant deviations from our prediction for trips longer than 4 h. For such long trips, one cannot in principle approximate the area below the step function in Fig. 3b with a triangle. Indeed, the Poisson fit in Fig. 4 overestimates the frequency of trips faster than 110 km h−1 for t=120 and 180 min. In Supplementary methods, we show that if the acceleration kicks are limited by a finite number of layers, the speed grows linearly for small times and saturates to a finite limiting speed (see Supplementary Fig. 8). This saturation can be clearly observed at national level (see Fig. 2) and for five out of six of the cities represented in Supplementary Fig. 7.
Fitting the model parameters
The parameters are computed according to the following procedure. First, we estimate the value of v0 from a linear fit of the curve  (t) (Fig. 2 and Supplementary Fig. 7) in the interval [0, 2] h. Then, the study of the surface generated by the curve
(t) (Fig. 2 and Supplementary Fig. 7) in the interval [0, 2] h. Then, the study of the surface generated by the curve  for different durations t is limited to the speed interval [v0, 130] (in km h−1) and the time interval [2.5, 182.5] min. The values of speeds are binned at integer values in km h−1, whereas trip durations are binned at intervals of 5 min (the centres of the bins fall at t=5, 10, 15, …, 180 min). Finally, we estimate the parameters p′ and δv′ of equation (4) by minimizing the sum of the square errors for all curves (for all t bins) simultaneously. In Fig. 4 we show the fits of six sections of the surface. The last parameter needed is the average travel time
for different durations t is limited to the speed interval [v0, 130] (in km h−1) and the time interval [2.5, 182.5] min. The values of speeds are binned at integer values in km h−1, whereas trip durations are binned at intervals of 5 min (the centres of the bins fall at t=5, 10, 15, …, 180 min). Finally, we estimate the parameters p′ and δv′ of equation (4) by minimizing the sum of the square errors for all curves (for all t bins) simultaneously. In Fig. 4 we show the fits of six sections of the surface. The last parameter needed is the average travel time  and has been measured separately for each city (see Supplementary Fig. 1). To predict consistently the curve P (Δr), the value
and has been measured separately for each city (see Supplementary Fig. 1). To predict consistently the curve P (Δr), the value  =0.30 h used in Fig. 5 and Supplementary Fig. 6 refers to the trips considered only (Δr>1 km and t>5 min).
=0.30 h used in Fig. 5 and Supplementary Fig. 6 refers to the trips considered only (Δr>1 km and t>5 min).
Data availability
Anonymized displacement lengths and travel times for the private cars' data are available from the authors upon request.
Additional information
How to cite this article: Gallotti, R. et al. A stochastic model of randomly accelerated walkers for human mobility. Nat. Commun. 7:12600 doi: 10.1038/ncomms12600 (2016).
Supplementary Material
Supplementary Figures 1-8, Supplementary Notes 1-3, Supplementary Methods and Supplementary References.
Acknowledgments
We thank P. Krapivsky, M. Lenormand and R. Louf for useful discussions. We thank Octo Telematics S.p.A. for providing the GPS database.
Footnotes
Author contributions R.G. and M.B. designed and performed research. A.B. and S.R. obtained the data set and performed the data pre-elaboration. R.G., A.B. and M.B. wrote the paper. R.G. prepared the figures.
References
- Axhausen K. W. & Gärling T. Activity-based approaches to travel analysis: conceptual frameworks, models, and research problems. Transp. Rev. 12, 323–341 (1992). [Google Scholar]
- Colizza V., Barrat A., Barthelemy M., Valleron A. J. & Vespignani A. Modeling the worldwide spread of pandemic influenza: baseline case and containment interventions. PLoS Med. 4, 95 (2007). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Balcan D. et al. Multiscale mobility networks and the spatial spreading of infectious diseases. Proc. Natl Acad. Sci. USA 106, 21459–21460 (2009). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Makse H. A., Havlin S. & Stanley H. E. Modelling urban growth patterns. Nature 377, 608–612 (1995). [Google Scholar]
- Bettencourt L. M., Lobo J., Helbing D., Kuhnert C. & West G. B. Growth, innovation, scaling, and the pace of life in cities. Proc. Natl Acad. Sci. USA 104, 7301–7306 (2007). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Louf R. & Barthelemy M. How congestion shapes cities: from mobility patterns to scaling. Sci. Rep. 4, 5561 (2014). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Vespignani A. Modelling dynamical processes in complex socio-technical systems. Nat. Phys. 8, 32–39 (2012). [Google Scholar]
- Axhausen K. W., Zimmermann A., Schönfelder S., Rindsfüser G. & Haupt T. Observing the rhythms of daily life: a six-week travel diary. Transportation 29, 95–124 (2002). [Google Scholar]
- Yan X.-Y., Han X.-P., Wang B.-H. & Zhou T. Diversity of individual mobility patterns and emergence of aggregated scaling laws. Sci. Rep. 3, 2678 (2013). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Liang X., Zhao J., Dong L. & Xu K. Unraveling the origin of exponential law in intra-urban human mobility. Sci. Rep. 3, 2983 (2013). [DOI] [PMC free article] [PubMed] [Google Scholar]
- González M. C., Hidalgo C. A. & Barabási A.-L. Understanding individual human mobility patterns. Nature 453, 779–782 (2008). [DOI] [PubMed] [Google Scholar]
- Song C., Koren T., Wang P. & Barabási A.-L. Modelling the scaling properties of human mobility. Nat. Phys. 6, 818–823 (2010). [Google Scholar]
- Kang C., Ma X., Tong D. & Liu Y. Intra-urban human mobility patterns: an urban morphology perspective. Physica A 391, 1702–1717 (2012). [Google Scholar]
- Cheng Z., Caverlee J., Lee K. & Sui D. Z. Exploring millions of footprints in location sharing services. ICWSM 2011, 81–88 (2011). [Google Scholar]
- Noulas A., Scellato S., Lambiotte R., Pontil M. & Mascolo C. A tale of many cities: universal patterns in human urban mobility. PLoS ONE 7, e37027 (2012). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Liu Y., Sui Z., Kang C. & Gao Y. Uncovering patterns of inter-urban trip and spatial interaction from social media check-in data. PLoS ONE 9, e86026 (2014). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Hawelka B. et al. Geo-located twitter as proxy for global mobility patterns. Cartogr. Geogr. Inf. Sci. 41, 260–271 (2014). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Roth C., Kang S. M., Batty M. & Barthelemy M. Structure of urban movements: polycentric activity and entangled hierarchical flows. PLoS ONE 6, e15923 (2011). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Liang X., Zheng X., Lv W., Zhu T. & Xu K. The scaling of human mobility by taxis is exponential. Physica A 391, 2135 (2012). [Google Scholar]
- Liu Y., Kang C., Gao S., Xiao Y. & Tian Y. Understanding intra-urban trip patterns from taxi trajectory data. J. Geogr. Syst. 14.4, 463–483 (2012). [Google Scholar]
- Wang W., Pan L., Yuan N., Zhang S. & Liu D. A comparative analysis of intra-city human mobility by taxi. Physica A 420, 134–147 (2015). [Google Scholar]
- Liu H., Chen Y.-H. & Liha J.-S. Crossover from exponential to power-law scaling for human mobility pattern in urban, suburban and rural areas. Eur. Phys. J. B 88, 117 (2015). [Google Scholar]
- Tang J., Liu F., Wang Y. & Wang H. Uncovering urban human mobility from large scale taxi GPS data. Physica A 438, 140–153 (2015). [Google Scholar]
- Bazzani A., Giorgini B., Rambaldi S., Gallotti R. & Giovannini L. Statistical laws in urban mobility from microscopic GPS data in the area of Florence. J. Stat. Mech. 2010, P05001 (2010). [Google Scholar]
- Gallotti R., Bazzani A. & Rambaldi S. Toward a statistical physics of human mobility. Int. J. Mod. Phys. C 23, 1250061 (2012). [Google Scholar]
- Gallotti R., Bazzani A., Degli Esposti M. & Rambaldi S. Entropic measures of individual mobility patterns. J. Stat. Mech. 2013, P10022 (2013). [Google Scholar]
- Rhee I., Shin M., Hong S., Lee K. & Kim S. On the levy-walk nature of human mobility. ACM Trans. Network. 19, 630–643 (2011). [Google Scholar]
- Zhao K., Musolesi M., Hui P., Rao W. & Tarkoma S. Explaining the power-law distribution of human mobility through transportation modality decomposition. Sci. Rep. 5, 9136 (2015). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Sagarra O., Szell M., Santi P., Diaz-Guilera A. & Ratti C. Supersampling and network reconstruction of urban mobility. PLoS ONE 10, e0134508 (2015). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Simini F., González M. C., Maritan A. & Barabási A.-L. A universal model for mobility and migration patterns. Nature 484, 96 (2012). [DOI] [PubMed] [Google Scholar]
- Louail T. et al. From mobile phone data to the spatial structure of cities. Sci. Rep. 4, 5276 (2014). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Gärling T. & Axhausen K. W. Introduction: habitual travel choice. Transportation 30, 1–11 (2003). [Google Scholar]
- Brockmann D., Hufnagel L. & Geisel T. The scaling laws of human travel. Nature 439, 462–465 (2006). [DOI] [PubMed] [Google Scholar]
- Clauset A., Shalizi C. R. & Newman M. E. Power-law distributions in empirical data. SIAM Rev. 51, 661–703 (2009). [Google Scholar]
- Edwards A. M. et al. Revisiting Lévy flight search patterns of wandering albatrosses, bumblebees and deer. Nature 449, 1044–1048 (2007). [DOI] [PubMed] [Google Scholar]
- Edwards A. M. Overturning conclusions of Lévy flight movement patterns by fishing boats and foraging animals. Ecology 92, 1247–1257 (2011). [DOI] [PubMed] [Google Scholar]
- Petrovskii S., Mashanova A. & Jansen V. A. A. Variation in individual walking behaviour creates the impression of a Lévy flight. Proc. Natl Acad. Sci. USA 108, 8704–8707 (2011). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Jansen V. A. A., Mashanova A. & Petrovskii S. Comment on Lévy walks evolve through interaction between movement and environmental complexity. Science 335, 918 (2012). [DOI] [PubMed] [Google Scholar]
- Lenormand M. et al. Cross-checking different sources of mobility information. PLoS ONE 9, e105184 (2014). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Barabási A.-L. The origin of bursts and heavy tails in human dynamics. Nature 435, 207–211 (2005). [DOI] [PubMed] [Google Scholar]
- Malmgren R. D., Stouffer D. B., Motter A. E. & Amaral L. A. N. A Poissonian explanation for heavy tails in e-mail communication. Proc. Natl Acad. Sci. USA 105, 18153–18158 (2008). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Zaburdaev V., Schmiedeberg M. & Stark H. Random walks with random velocities. Phys. Rev. E 78, 011119 (2008). [DOI] [PubMed] [Google Scholar]
- Stumpf M. P. H. & Porter M. A. Critical truths about power laws. Science 335, 665–666 (2012). [DOI] [PubMed] [Google Scholar]
- Mantegna R. N. & Stanley H. E. Stochastic process with ultraslow convergence to a Gaussian: the truncated Lévy flight. Phys. Rev. Lett. 73, 2946 (1994). [DOI] [PubMed] [Google Scholar]
- Gallotti R., Bazzani A. & Rambaldi S. Understanding the variability of daily travel-time expenditures using GPS trajectory data. EPJ Data Sci. 4, 1–14 (2015). [Google Scholar]
- Kölbl R. & Helbing D. Energy laws in human travel behaviour. New. J. Phys. 5, 48.1–48.12 (2003). [Google Scholar]
- Helbing D. Traffic and related self-driven many-particle systems. Rev. Mod. Phys. 73, 1067–1141 (2001). [Google Scholar]
- Han X.-P., Hao Q., Wang B.-H. & Zhou T. Origin of the scaling law in human mobility: hierarchy of traffic systems. Phys. Rev. E 83, 036117 (2011). [DOI] [PubMed] [Google Scholar]
- Reed W. J. & Hughes B. D. From gene families and genera to incomes and internet file sizes: why power laws are so common in nature. Phys. Rev. E 66, 067103 (2002). [DOI] [PubMed] [Google Scholar]
- Burkhardt T. W. in First-Passage Phenomena and their Applications (eds Metzler R., Oshanin G., Redner S. Chapter 2 World Scientific (2014). [Google Scholar]
- Gallotti R. Statistical Physics and Modeling of Human Mobility PhD thesis University of Bologna79–80 ((2013). [Google Scholar]
- Viswanathan G. M., da Luz M. G. E., Raposo E. P. & Stanley H. E. The Physics of Foraging: An Introduction to Random Searches and Biological Encounters Cambridge University Press, (2011). [Google Scholar]
- Gallotti R. & Barthelemy M. Anatomy and efficiency of urban multimodal mobility. Sci. Rep. 4, 6911 (2014). [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bazzani A. et al. in Proceedings of the Privacy, Security, Risk and Trust (PASSAT) and 2011 IEEE Third International Conference on Social Computing (SocialCom), 1455–1459 (2011).
- Giovannini L. A Novel Map-Matching Procedure for Low-Sampling GPS Data with Applications to Traffic Flow Analysis PhD thesis University of Bologna ((2011). [Google Scholar]
- Bazzani A., Giorgini B., Giovannini L., Gallotti R. & Rambaldi S. in MIPRO, 2011 Proceedings of the 34th International Convention, 1615–1618 (2011).
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Supplementary Materials
Supplementary Figures 1-8, Supplementary Notes 1-3, Supplementary Methods and Supplementary References.
Data Availability Statement
Anonymized displacement lengths and travel times for the private cars' data are available from the authors upon request.