

Abstract
This study presents an animal mobility system, equipped with a positioning running wheel (PRW), as a way to quantify the efficacy of an exercise activity for reducing the severity of the effects of the stroke in rats. This system provides more effective animal exercise training than commercially available systems such as treadmills and motorized running wheels (MRWs). In contrast to an MRW that can only achieve speeds below 20 m/min, rats are permitted to run at a stable speed of 30 m/min on a more spacious and high-density rubber running track supported by a 15 cm wide acrylic wheel with a diameter of 55 cm in this work. Using a predefined adaptive acceleration curve, the system not only reduces the operator error but also trains the rats to run persistently until a specified intensity is reached. As a way to evaluate the exercise effectiveness, real-time position of a rat is detected by four pairs of infrared sensors deployed on the running wheel. Once an adaptive acceleration curve is initiated using a microcontroller, the data obtained by the infrared sensors are automatically recorded and analyzed in a computer. For comparison purposes, 3 week training is conducted on rats using a treadmill, an MRW and a PRW. After surgically inducing middle cerebral artery occlusion (MCAo), modified neurological severity scores (mNSS) and an inclined plane test were conducted to assess the neurological damages to the rats. PRW is experimentally validated as the most effective among such animal mobility systems. Furthermore, an exercise effectiveness measure, based on rat position analysis, showed that there is a high negative correlation between the effective exercise and the infarct volume, and can be employed to quantify a rat training in any type of brain damage reduction experiments.
Keywords: Behavior, Issue 115, Positioning running wheel (PRW), brain damage reduction, adaptive acceleration curve, infrared sensors, middle cerebral artery occlusion (MCAo), modified neurological severity scores (mNSS), inclined plane test
Introduction
Strokes exist continuously as a financial burden to countries globally, leaving countless patients physically and mentally disabled1,2. There is clinical evidence to suggest that regular exercise can improve nerve regeneration and strengthen neural connections3,4, and it is also shown that exercise can decrease the risk of suffering ischemic strokes5. With either a treadmill or a running wheel as an exercise training system, rodents, such as rats, serve as a proxy for humans for testing the effectiveness of exercises in a vast majority of clinical experiments6-8. A training system normally involves training a rat for a certain period of time, during which a rat runs at a certain speed. Therefore, the training intensity is generally calculated according to the exercise speed and duration6-8. The same approach is applied to estimate the amount of exercise required for neurophysiological protection. However, the experimental exercises are sometimes found to be ineffective, such as when a rat stumbles, falls, or grabs the rails once they are unable to catch up with the running wheel speed9-11. Needless to say, incidents of ineffective exercise significantly reduce the exercise benefit. Even though there is no any universally accepted approach currently to quantify the effective exercises for reducing brain damage, the level of effective exercises still stands as an objective appraisal for clinical researchers to illustrate the benefits of exercise in the discipline of neurophysiology.
There exist a number of limitations on commercially available animal mobility systems used in today's brain damage reduction experiments12. In a treadmill case, rats are forced to run by means of electric shocks, inducing tremendous psychological stress on the animals and thereby interference in the final neurophysiological test results8,13,14. Running wheels can be categorized into two types, namely voluntary and forced. Voluntary running wheels allow rats to run naturally, creating excessive variability due of the differences in the rats' physical traits and abilities15, while motorized running wheels (MRWs) employ a motor to turn the wheel, forcing rats to run. Despite also being a form of forced training, MRWs imposes less psychological stress on rats than treadmills13,16,17. However, experiments using MRWs have reported that rats sometimes interrupt the exercise by grabbing the rails on the wheel track and refusing to run at speeds exceeding 20 m/min9. These examples show that animal mobility systems currently available have an inherent disadvantage that inhibits effective exercising. For objective rat training purposes, the development of a highly effective training system but with low interference is therefore viewed as an urgent issue for neurophysiological exercise experiments.
This study presents a highly effective running wheel system for experiments on reducing the severity of the effects of the stroke11. In addition to a reduced number of interference factors during a training process, this system detects the running position of a rat using infrared sensors embedded in the wheel, thereby achieving a more reliable estimate of effective exercise activity. The psychological stress imposed by traditional treadmills and the frequent exercise interruptions in MRWs both skew the objectivity of the resulting exercise estimates. A positioning running wheel (PRW) system presented in this study is developed in an attempt to minimize the unwanted interference while providing a reliable training model for quantifying effective exercise.
Protocol
Ethics Statement: The experimental procedures were approved by the animal ethics committee of Southern Taiwan University of Science and Technology Laboratory Animal Center, National Science Council, Republic of China (Tainan, Taiwan).
1. Constructing the Running Wheel Structure
NOTE: All acrylic should be transparent. Wash the disassembled wheel with water, then use alcohol to wipe the rubber track and acrylic sheets after each use.
Obtain an acrylic running wheel to be 55 cm in diameter and 15 cm in width. NOTE: This wheel is larger than a traditional running wheel (diameter = 35 cm; width = 12 cm) (Figure 1A).
Using a cutter, cut a quarter-circle opening into one side of the running wheel to act as an entrance and an exit as well for rats (Figure 1B). Place a layer of high-friction rubber track on the inside of the acrylic wheel (Figure 1B).
Place an iron rod with bearings to connect the running wheel (Figure 1B). Place two acrylic triangular columns on either side of the running wheel to act as the support frame (Figure 1B).
Attach a 1 mm thick semicircular, transparent acrylic sheet to the external sides of the two triangular columns using screws. Use this sheet to deploy the infrared sensors. Ensure that the acrylic sheets are approximately 3 cm away from each side of the running wheel.
2. Deploying the Infrared Sensors and Defining the Effective Exercise Area
NOTE: Take into account the running wheel size and the rat length in the design of an infrared system. A rat only triggers a single sensor at a time. In this experiment, rats are between 20 and 23 cm long.
Drill a hole in the acrylic sheets every 45° (arc interval = 21 cm), with the distance between two holes being roughly equivalent to the length of a test rat. Make the holes the same size as the infrared sensors (Figure 2A). NOTE: For traditional MRWs, drill a hole every 70° (arc interval = 21 cm, Figure 2B).
During a PRW experiment, maintain the rats at a steady state of running between 0° to 135°. NOTE: Thus define this area as the effective exercise area, while view all the other sections as the ineffective exercise areas. For traditional MRWs, define the effective exercise area as the portion between 0° to 140° (Figure 2B).
3. Driving the Running Wheel
Use a brushless DC motor and a motor driver to drive the running wheel.
Mount a 10 cm diameter rubber disk on the motor’s central axis (Figure 1B).
Using the iron frame and springs to support the motor, connect the rubber disk from the motor’s central axis to the outer side of the running wheel. NOTE: The springs must cooperate with the screws to allow dynamic motor height adjustments and to prevent rubber disk from being disconnected to the running wheel track because of loose springs.
Operate the motor to drive the 10 cm diameter rubber disk using a microcontroller, and observe the wheel rotate due to the friction between the rubber disk and the runway of wheel, creating a motorized running wheel platform.
Mount four infrared sensors sequentially between 0° to 135° (Figure 2A). NOTE: For traditional MRWs, mount sensors between 0° to 140° (Figure 2B).
Connect four pairs of infrared sensors mounted in both acrylic sheets to the microcontroller’s general pins using single core cables, thereby forming a positioning running wheel system.
4. Constructing an Adaptive Acceleration Curve
- Three days before the commencement of official 3 week exercise training, train rats by manually operating the running wheel. NOTE: The goal is to allow the rats to become familiar with the running environment, and is to test whether each rat can endure running at 20 m/min.
- During the manually operated training, gradually accelerate the running speed until a rat is unable to keep pace. When this occurs, decrease the speed until the rat regains a steady running pace, and then gradually increase the speed again until the rat reaches 20 m/min (dashed lines in Figure 3). The manual training involves seven rats to construct the training curves.
Using a numerical equation to fit the measured data on Day 3 of the manual testing, calculate the acceleration curves closest to the manual training (the curve with circles, Figure 3). Fit Equation 1 to raw data, where Cini = 8, Cfin = 20 and τ = 30 represent the initial velocity, the final velocity and the time constant, respectively). NOTE: This equation adapts to a rat’s body condition. Therefore, refer to the calculated curve as an adaptive acceleration-training model.
 (1)
(1)Use Equation 1 for Week 1 of the formal training.
For Weeks 2 and 3 of the training, adjust the parameters of Equation 1, that is to say, change A from 12 to 22, to allow the speed to reach 30 m/min.
5. Controlling the Software Program
NOTE: Exclusively develop a code for the microcontroller-based motor operation and for signal transmission from the infrared sensors to a computer for subsequent data analysis.
- Use C programming language to write a software control program containing one main program and two interrupt-service routines for the timer in the microcontroller18.
- Ensure that the main program initializes the microcontroller’s register and constructs an adaptive acceleration curve model in the microcontroller’s memory.
- Use the interrupt-service routine of Timer 0 to activate the adaptive acceleration curve and calculate the entire training duration.
- Use the interrupt-service routine of Timer 1 to extract the signal data from the infrared sensors and to transfer the data to the computer.
- Use the main program to record the position of 0o to adjust the speed of running wheel.
Once the receiving IR sensor at 0° is triggered, interpret it as a fall incidence, which is accumulated by the main program. The moment the occurrence times of fall incidences hits the 10% threshold of the number of the rat position detections, deaccelerate the running wheel automatically as a safety measure for trained rats. NOTE: The speed of running wheel is reduced until the rat can return to the safe zone (0o to 135o) and maintain a stable running state for the safety measure.
6. Operating the Positioning Running Wheel System
- Turn on the microcontroller and wait for an operator to press the button to start each week’s training model.
- Press the “Start” button to begin the training model for Week 1. NOTE: The motor automatically accelerates based on the adaptive acceleration curve until it reaches 20 m/min, and automatically stops after 30 min.
- Press the “Start” button to begin the training model for Week 2. NOTE: The motor automatically accelerates based on the adaptive acceleration curve until it reaches 30 m/min, and automatically stops after 30 min.
- Press the “Start” button to begin the training model for Week 3. NOTE: The motor automatically accelerates based on the adaptive acceleration curve until it reaches 30 m/min, and automatically stops after 60 min. NOTE: Throughout the entire training process, transmit the signal data received from the infrared sensors to a computer wirelessly.
Using a computer, analyze the location data to obtain an effective exercise measure for the entire exercise process (
 ). See Equation 2.
). See Equation 2.  (2) NOTE: EEE, EED and IED represent the effective exercise measure, the effective and ineffective exercise durations, respectively.
(2) NOTE: EEE, EED and IED represent the effective exercise measure, the effective and ineffective exercise durations, respectively.
7. Training the Rats
Randomly divide adult male Sprague-Dawley rats into five groups (n = 9 for each group): the sham, control, treadmill, MRW and PRW groups.
Conduct a 3 week exercise training for the three exercise groups, i.e. the treadmill, MRW and PRW groups, while do not for the sham and the control groups. NOTE: The 3 week exercise training for each exercise group is 20 m/min for 30 min during Week 1, 30 m/min for 30 min during Week 2 and 30 m/min for 60 min during Week 3.
8. Animal and Stroke Model
As stated in Sec. 7.1, randomly divide all the involved adult male Sprague-Dawley rats, weighing between 250-280 g, into 5 groups.
- Weigh all the animals to ensure accurate drug dosage calculations. Anesthetize the rats with sodium pentobarbital (25 mg/kg, intraperitoneally [i.p.]) and a mixture containing ketamine (4.4 mg/ kg, intramuscularly [i.m.]), atropine (0.02633 mg/kg, [i.m.]) and xylazine (6.77 mg/kg, [i.m.]).
- Assess the anesthetic depth by monitoring the breathing rate (normal 70-115 breaths/min), rhythm, depth of respiration, mucous membrane color and regular testing of reflexes, e.g. toe pinch, tail pinch, eyelid/eyelash and palpebral.
Insert temperature probes into the rectum, and maintain the rectal temperatures between 37 to 37.5 °C using separate heating lamps.
- Induce focal ischemia, transient middle cerebral artery occlusion (MCAo) by inserting a filament into the internal carotid artery to occlude the orifice of the middle cerebral artery via external carotid artery approach19.
- Perform the same operating procedures on the sham-operated animals, while do not insert a filament into the internal carotid artery. Maintain focal cerebral ischemia for 1 hr, remove the filament, close the incision, and then leave 1 cm of the nylon suture protruding, which could be withdrawn to allow reperfusion.
Administer subcutaneous (s.c.) injections of an analgesic (buprenorphine (0.05 mg/kg, s.c.)), into the animals for analgesia twice a day for 3 days.
9. Assessing Neural Damage
Evaluate neurological and motor functions, respectively, by the neurological severity score (mNSS)20 and an inclined plane test21. NOTE: mNSS is a composite of the motor (muscle status, abnormal movement), sensory (visual, tactile and proprioceptive) and reflex tests. Give one point for failure to perform a task. Rate neurological function on a scale of 0-18 (normal score = 0; maximal deficit score = 18).
Assess all the rats in terms of behavioral performance the day before and daily over a time span of 7 days after the surgery.
- Measure the hind limb grip strength of the rat using an inclined plane.
- Place rats on the inclined climbing apparatus on a daily basis, and acclimatize the rats to the apparatus and the testing conditions 1 week before testing.
- Place each rat on the apparatus and encourage the rat to climb the platform until the top of the apparatus during the acclimatization period.
- Place the rat at the top of the apparatus with the head downward during testing. Ensure that the body axis of the rat stays along to a 20 x 20 cm2 rubber ribbed surface on the inclined plane starting at an angle of 25°.
- Increase the angle dynamically using a ball screw connected with a stepper motor to determine the maximal angle at which an animal could hold to the plane. Increase the angle of the inclined plane gradually until the mouse failed to hold on the inclined plane, and then detect a sliding down event. The baseline degree of inclined plane is 25° in the beginning.
- Ask two observers (unaware of what treatment the rats had been given), to independently examine and score all the behavioral tests, i.e. the mean of the left- and right-side maximal angles.
Sacrifice all the animals on day 7 after MCAo. Perfuse the hearts of the animals under deep anesthesia (sodium pentobarbital 100 mg/kg, i.p.) with saline22. Remove and then immerse the brain tissue in cold saline for 5 min, which is then sliced into 2.0 mm coronal sections using a tissue slicer22.
Submerge the fresh brain sections into 2, 3, 5-triphenyltetrazolium chloride (TTC) at 37 °C for 30 min, then transfer the slices to 5% formaldehyde solution for fixation at 4 °C for 24 hr. Place the stained brain slices on a plexiglas holder.
Photograph the TTC-stained slices with a calibrated scale using a CCD camera linked to a personal computer loaded with image processing software. Use a semi-automated image analysis system as well to estimate the infarcted area (mm2) from each TTC-stained brain slice23.
Calculate the total infarct volume for each slice by summation of infarcted areas of all brain slices. Mark the unstained area (ischemic brain) separately on each side of 2 mm thick slices, then calculate the infarct volume and the mean value.
Calculate the corrected infarct volume (CIV) as CIV= {LT- (RT- RI)}
 d (3) NOTE: Where LT and RT denote the areas of the left and right hemispheres in mm2, respectively, RI is the infarcted area in mm2, and d = 2 mm is the slice thickness.
d (3) NOTE: Where LT and RT denote the areas of the left and right hemispheres in mm2, respectively, RI is the infarcted area in mm2, and d = 2 mm is the slice thickness.
Representative Results
This section is devoted to comparisons, made 1 week after surgery, on the mNSS scores, incline plane test results and brain infarct volumes among five groups. Figure 4A and 4B present the average mNSS scores and the average of incline plane test results, respectively. The PRW group appears as the best in terms of mNSS improvement. The significant differences between PRW and MRW and between treadmill and PRW clearly suggest that the PRW protects against stroke more effectively than other animal mobility systems currently available. Inclined plane tests are performed at significantly steeper inclination angles in all the exercise groups than in the control group over a time span of seven days after surgery, clearly demonstrating the benefits of exercise as a means of reducing the severity of the effects of the stroke. Particularly, the inclination angle in the PRW group was demonstrated as the steepest among all the exercise groups, and is even comparable with that in the sham group, showing a higher level of recovery than treadmill and MRW. Furthermore, Figure 4C shows that, after extracting the brain sections following 7 days of neural damage assessment, the PRW group not only exhibited a significantly smaller infarct volume than the control group but also exhibited the smallest infarct volume among all the exercise groups. It is hence clearly demonstrated that the rats trained using a PRW suffered significantly less amount of brain infarction damage than those using commercially available training systems, verifying the superiority of PRW in respect of brain damage reduction training.
This study presented a scientific approach for quantifying effective exercise activity in brain damage reduction training. During 3 weeks of training, there is a 98% effective exercise measure in PRW, whereas only 68% in MRW (Table 1). This significant difference in the effective exercise rate demonstrates that the superiority of the PRW training mechanism. The ineffective exercise measure, defined as 1 – the effective exercise measure and correlated with the mNSS score (Figure 4A), gives an 88% correlation with the mNSS score (Table 1). In addition, there exists an 85% correlation between the effective exercise measure and the incline plane angle (Table 1), and a 92% correlation between the ineffective exercise measure and the infarct volume (Table 1). Particularly, an effective exercise measure as high as 98% is correlated with an extreme low infarct volume in the PRW case. A significant correlation is hence demonstrated between the ineffective exercise and the extent of neurological damage.
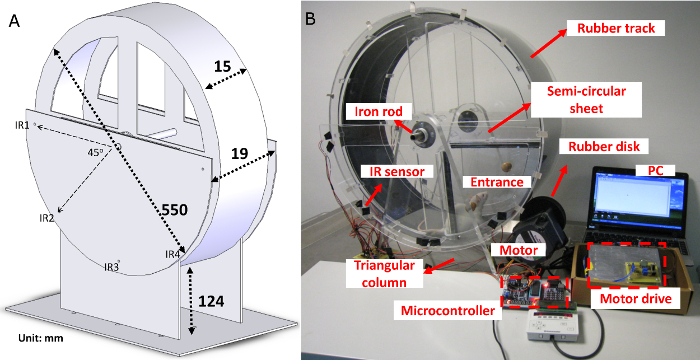 Figure 1: PRW system. (A) Design drawing of a PRW. The running wheel is 55 cm in diameter and 15 cm in width. On the lower half of the running wheel, a hole has been drilled every 45° for infrared sensors installment. (B) Actual picture of the PRW. A layer of high friction rubber track is positioned on the inside of the acrylic wheel. A quarter-circle opening on one side of the running wheel acts as an entrance and an exit as well for the trained animals. An iron rod with bearings connects the running wheel to the triangular columns, supporting the running wheel. A motor is set on the outside of the running wheel track and is connected to the running wheel track by a 10 cm central-axis-mounted rubber disk. A microcontroller operates the motor and thereby commands the running wheel. A pair of semicircular, transparent acrylic sheets are attached to the triangular columns, and four pairs of infrared sensors are embedded in the acrylic sheets. Please click here to view a larger version of this figure.
Figure 1: PRW system. (A) Design drawing of a PRW. The running wheel is 55 cm in diameter and 15 cm in width. On the lower half of the running wheel, a hole has been drilled every 45° for infrared sensors installment. (B) Actual picture of the PRW. A layer of high friction rubber track is positioned on the inside of the acrylic wheel. A quarter-circle opening on one side of the running wheel acts as an entrance and an exit as well for the trained animals. An iron rod with bearings connects the running wheel to the triangular columns, supporting the running wheel. A motor is set on the outside of the running wheel track and is connected to the running wheel track by a 10 cm central-axis-mounted rubber disk. A microcontroller operates the motor and thereby commands the running wheel. A pair of semicircular, transparent acrylic sheets are attached to the triangular columns, and four pairs of infrared sensors are embedded in the acrylic sheets. Please click here to view a larger version of this figure.
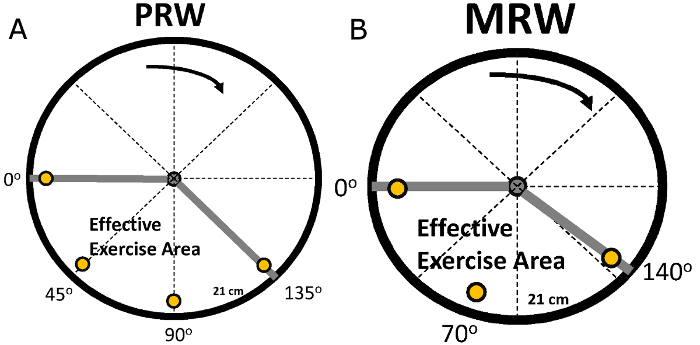 Figure 2: Deployment of infrared sensors. (A) According to the size of the PRW and the body length of a rat, a pair of infrared sensors were deployed every 45° between 0° and 135° (producing a total of 8 sensors). Between 0° and 135°, rats exhibited a state of normal running, and therefore this area was defined as the effective exercise area. (B) In the MRW case, a pair of infrared sensors were deployed every 70° between 0° to 140°. Please click here to view a larger version of this figure.
Figure 2: Deployment of infrared sensors. (A) According to the size of the PRW and the body length of a rat, a pair of infrared sensors were deployed every 45° between 0° and 135° (producing a total of 8 sensors). Between 0° and 135°, rats exhibited a state of normal running, and therefore this area was defined as the effective exercise area. (B) In the MRW case, a pair of infrared sensors were deployed every 70° between 0° to 140°. Please click here to view a larger version of this figure.
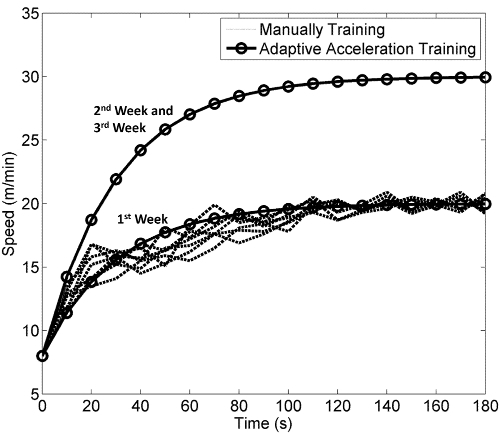 Figure 3: Construction of an adaptive acceleration-training model for smooth speed-up exercise. The dashed lines represent the manually specified acceleration curves for the training of seven rats on Day 3, and can be characterized as an exponential function. Nonlinear curve fitting is then performed accordingly. The curve with circles represents the initial adaptive acceleration curve for Week 1, the Week 1 curve for short. The curve for Weeks 2 and 3 is an adjusted version of the Week 1 curve with a final speed to 30 m/min (Cfin = 30). Please click here to view a larger version of this figure.
Figure 3: Construction of an adaptive acceleration-training model for smooth speed-up exercise. The dashed lines represent the manually specified acceleration curves for the training of seven rats on Day 3, and can be characterized as an exponential function. Nonlinear curve fitting is then performed accordingly. The curve with circles represents the initial adaptive acceleration curve for Week 1, the Week 1 curve for short. The curve for Weeks 2 and 3 is an adjusted version of the Week 1 curve with a final speed to 30 m/min (Cfin = 30). Please click here to view a larger version of this figure.
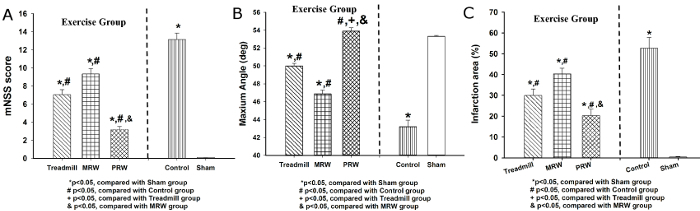 Figure 4: Comparison on neurological damage assessment among groups over a time span of 7 days after surgery (each group with 9 rats). (A) Average mNSS scores (mean ± SD). There exists a significant variation among all the exercise and the control groups, evidence that exercise benefits brain damage reduction. The PRW group provides the lowest score among the exercise groups, demonstrating a superior neuroprotective mechanism to the other training systems. (B) Average hind-leg test angles (mean ± SD). A much steeper angle is demonstrated in the PRW than in the control group, and is demonstrated as the steepest among all the exercise groups. In addition, there was little difference between the PRW and the sham groups, indicating that PRW regenerated rats' hind-leg grip to a higher level. (C) Comparison on the infarct volume (mean ± SD). PRW acquires much smaller volume than the control group, and ranks the lowest among all the exercise groups, validating the prominent effect of PRW on brain damage reduction. Please click here to view a larger version of this figure.
Figure 4: Comparison on neurological damage assessment among groups over a time span of 7 days after surgery (each group with 9 rats). (A) Average mNSS scores (mean ± SD). There exists a significant variation among all the exercise and the control groups, evidence that exercise benefits brain damage reduction. The PRW group provides the lowest score among the exercise groups, demonstrating a superior neuroprotective mechanism to the other training systems. (B) Average hind-leg test angles (mean ± SD). A much steeper angle is demonstrated in the PRW than in the control group, and is demonstrated as the steepest among all the exercise groups. In addition, there was little difference between the PRW and the sham groups, indicating that PRW regenerated rats' hind-leg grip to a higher level. (C) Comparison on the infarct volume (mean ± SD). PRW acquires much smaller volume than the control group, and ranks the lowest among all the exercise groups, validating the prominent effect of PRW on brain damage reduction. Please click here to view a larger version of this figure.
| Group | Effective exercise measure % (EEE) | mNSS | Inclined plane angle | Infarct volume |
| PRW | 98.88 ± 1.11 | 23.54 ± 3.08 | 100 | 37.6 ± 1.08 |
| MRW | 68.05 ± 5.39 | 70.7 ± 6.48 | 34.23 ± 4.48 | 72.76 ± 6.52 |
| Control | 0 | 100 | 0 | 100 |
| Correlation coefficient (R2) with EEE | -0.88 | 0.85 | -0.92 |
Table 1: Comparison on correlation between effective exercise activity and neurological damage. Effective exercise activity comparison among the PRW, MRW and the control groups. The PRW and MRW groups give a 98% and a 68% average effective exercise measure, respectively, after a 3 week training, meaning that PRW provides a larger amount of effective training. There exist a 0.88 correlation between mNSS and ineffective exercise measure, a 0.85 correlation between the effective exercise measure and the inclined plane angle, and a 0.92 correlation between the ineffective exercise measure and the infarct volume, respectively. In particular, an effective exercise rate up to 98% is correlated with an extremely small infarct volume in PSW. The data of mNSS, inclined plane angle, and infarct volumes are normalized.
| Function | PRW (this study) | MRW | Treadmill |
| Exercise training | Forced (laterally motorized) | Forced (centrally motorized) | Forced (electrical shock) |
| Number of simultaneously training animals | Single | Single | Plurality |
| Runway structure | Textured rubber belt | Bars | Rubber belt |
| Trainable intensity | Low, intermediate, high | Low, intermediate | Low, intermediate, high |
| Adaptive acceleration training | Yes | No | No |
| Running position detection | Yes | No | No |
| Deceleration training | Yes | No | No |
| Effective exercise assessment | Yes | No | No |
Table 2: Comparison among animal mobility systems. PRW can be used at any level of training intensity. Combining a customized wheel with an adaptive training curve, PRW serves as a superior alternative to counterparts. Furthermore, infrared position detection technique is employed to quantify an effective exercise activity for brain damage reduction.
Discussion
This protocol describes a highly effective running wheel system for reducing the severity of the effects of the stroke in animals. As a rat-friendly testbed, this platform is designed as well in such a way that a stable running speed can be maintained by rats throughout a running process by means of a predetermined adaptive acceleration curve. In typical training systems, preset training speeds and durations are set manually. Once an exercise commences, a preset speed is reached very shortly. In this context, it is very likely that rats are unable to reach higher speeds, making them tumble and fall and affecting the stability of their runs accordingly. The critical steps are, 1.1, 4.1 and 4.2, which are the key features in PRW as opposed to MRW. The integration between a spacious running track, as described in step. 1.1, and an adaptive acceleration-training model construction, referred to in step. 4.1 and 4.2, is presented as an improved version of a typical MRW. Such key features lead to a reduced infarct volume than MRW. The overall design of the presented system is designed as a rat-friendly testbed for a reduction in ineffective exercise. More specifically, 4 pairs of infrared sensors are deployed to detect the real-time position of a rat, providing a measure to quantify an effective exercise activity, defined in step. 6.6, for comparisons on correlation with the mNSS scores, inclined plane angle and brain infarction volume. This measure can be used to quantify any type of neurophysiological experiments, unrealized yet in conventional training platforms. However, it is very likely that an effective exercise cannot be detected for a small rat due to a sparse distribution of IR sensors. Furthermore, a major disadvantage relative to a treadmill is that only a single rat can be trained at a time on this platform. The system troubleshooting involves two parts. One is an accurate sensor alignment for signal transmission and reception due to the high directivity of IR, while the other is the running wheel rotating at specified revolutions per minute (rpm). An IR source/detector pair need to be aligned until a strong signal can be received by the detector. With regard to the running wheel, the 10 cm diameter rubber disk is worn out gradually when the wheel is rotated for a long period of time. Therefore, a spring need to be loosened as a way to compensate an inadequate rubber disk friction for normal wheel rotation. Table 2 gives a comparison on the forced animal mobility systems used in brain damage reduction experiments.
Tests give significantly better results in terms of the mNSS scores, incline angle and infarct volumes in the PRW group than in the control group (p <0.05). The PRW group was validated as the one providing the most amount of effective exercise training among all the exercise groups. In this study, when trained using the traditional MRW, rats are frequently found to hold onto the bars of the runway and refuse to run at a speed beyond 20 m/min, an agreement with a piece of prior work9. As a way to improve the rat training performance, the metallic runway is redesigned as a high-density rubber running track in this work. In a treadmill, psychological stress is inevitably imposed on the electric shock-driven rats, an unsolved problem in the discipline of physiology in the past. Therefore, a way must be found to reduce the tumble frequency and to ease the psychological stress imposed on rats during training. In this manner, test results can be interpreted more accurately, as a convincing way to demonstrate the exercise benefit to brain damage reduction. This is a major motivation behind this work.
This work successfully provides a quantitative measure of an effective exercise activity correlated with the infarct volume, the most direct evidence of stroke damage. Therefore, effective exercise in other types of animal-based tests can be qualified accordingly. As presented in6-8, both the exercise intensity and duration are user-specified in neurophysiological experiments, but not taking into account the effective amount of an exercise training. Effective exercise activity is validated as a key factor to stroke neuroprotection, using this rat-friendly and innovative animal mobility system.
It is believed that this platform can be applied to variable velocity training and related issues in the future. As pointed out in24,25, variable velocity training is viewed as a more effective training in the discipline of exercise physiology. Using infrared position detection technique as a basis, variable velocity training can be precisely conducted on athletes for a deep investigation into the neurophysiological protection mechanism.
Disclosures
The authors have nothing to disclose.
Acknowledgments
The authors would like to thank Dr. Jhi-Joung Wang, who is the Vice Superintendent of Education at Chi-Mei Medical Center, and Dr. Chih-Chan Lin from the Laboratory Animal Center, Department of Medical Research, Chi-Mei Medical Center, 901 Zhonghua, Yongkang Dist., Tainan City 701, Taiwan, for providing the shooting venue. They would also like to thank Miss Ling-Yu Tang and Mr. Chung-Ham Wang from the Department of Medical Research, Chi-Mei Medical Center, Tainan, Taiwan, for their valuable assistance in demonstrating the prototype system in real experiments with rats. The author gratefully acknowledges the support provided for this study by the Ministry of Science and Technology (MOST 104- 2218-E-167-001-) of Taiwan.
References
- Mayo NE, Wood-Dauphinee S, Cote R, Durcan L, Carlton J. Activity, participation, and quality of life 6 months poststroke. Arch Phys Med Rehabil. 2002;83(8):1035–1042. doi: 10.1053/apmr.2002.33984. [DOI] [PubMed] [Google Scholar]
- Duncan PW, Goldstein LB, Horner RD, Landsman PB, Samsa GP, Matchar DB. Similar motor recovery of upper and lower-extremities after stroke. Stroke. 1994;25(6):1181–1188. doi: 10.1161/01.str.25.6.1181. [DOI] [PubMed] [Google Scholar]
- Raichlen DA, Gordon AD. Relationship between exercise capacity and brain size in mammals. PLoS One. 2011;6(6) doi: 10.1371/journal.pone.0020601. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Trejo JL, Carro E, Torres-Aleman I. Circulating insulin-like growth factor I mediates exercise-induced increases in the number of new neurons in the adult hippocampus. J Neurosci. 2001;21(5):1628–1634. doi: 10.1523/JNEUROSCI.21-05-01628.2001. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Zhang F, Wu Y, Jia J. Exercise preconditioning and brain ischemic tolerance. Neuroscience. 2011;177:170–176. doi: 10.1016/j.neuroscience.2011.01.018. [DOI] [PubMed] [Google Scholar]
- Wang RY, Yang YR, Yu SM. Protective effects of treadmill training on infarction in rats. Brain Res. 2001;922(1):140–143. doi: 10.1016/s0006-8993(01)03154-7. [DOI] [PubMed] [Google Scholar]
- Ding Y, et al. Exercise pre-conditioning reduces brain damage in ischemic rats that may be associated with regional angiogenesis and cellular overexpression of neurotrophin. Neuroscience. 2004;124(3):583–591. doi: 10.1016/j.neuroscience.2003.12.029. [DOI] [PubMed] [Google Scholar]
- Li J, Luan XD, Clark JC, Rafols JA, Ding YC. Neuroprotection against transient cerebral ischemia by exercise pre-conditioning in rats. Brain Res. 2004;26(4):404–408. doi: 10.1179/016164104225016038. [DOI] [PubMed] [Google Scholar]
- Leasure JL, Jones M. Forced and voluntary exercise differentially affect brain and behavior. Neuroscience. 2008;156(3):456–465. doi: 10.1016/j.neuroscience.2008.07.041. [DOI] [PubMed] [Google Scholar]
- Chen CC, et al. A Forced running wheel system with a microcontroller that provides high-intensity exercise training in an animal ischemic stroke model. Braz J Med Biol Res. 2014;47(10):858–868. doi: 10.1590/1414-431X20143754. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Chen C-C, et al. Improved infrared-sensing running wheel systems with an effective exercise activity indicator. PLoS One. 2015;10(4) doi: 10.1371/journal.pone.0122394. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Fantegrossi WE, Xiao WR, Zimmerman SM. Novel technology for modulating locomotor activity as an operant response in the mouse: Implications for neuroscience studies involving "exercise" in rodents. J Neurosci Methods. 2013;212(2):338–343. doi: 10.1016/j.jneumeth.2012.10.020. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Hayes K, et al. Forced, not voluntary, exercise effectively induces neuroprotection in stroke. Acta Neuropathol. 2008;115(3):289–296. doi: 10.1007/s00401-008-0340-z. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Arida RM, Scorza CA, da Silva AV, Scorza FA, Cavalheiro EA. Differential effects of spontaneous versus forced exercise in rats on the staining of parvalbumin-positive neurons in the hippocampal formation. Neurosci Lett. 2004;364(3):135–138. doi: 10.1016/j.neulet.2004.03.086. [DOI] [PubMed] [Google Scholar]
- Waters RP, et al. Selection for aerobic capacity affects corticosterone, monoamines and wheel-running activity. Physiol Behav. 2008. pp. 1044–1054. [DOI] [PMC free article] [PubMed]
- Ke Z, Yip SP, Li L, Zheng X-X, Tong K-Y. The effects of voluntary, involuntary, and forced exercises on brain-derived neurotrophic factor and motor function recovery: A rat brain ischemia model. PLoS One. 2011;6(2) doi: 10.1371/journal.pone.0016643. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Caton SJ, et al. Low-carbohydrate high-fat diets in combination with daily exercise in rats: Effects on body weight regulation, body composition and exercise capacity. Physiol Behav. 2012;106(2):185–192. doi: 10.1016/j.physbeh.2012.02.003. [DOI] [PubMed] [Google Scholar]
- C8051F330/1/2/3/4/5 datasheet. Silicon Laboratories Inc; 2006. Available from: https://www.silabs.com/Support%20Documents/TechnicalDocs/C8051F33x.pdf. [Google Scholar]
- Longa EZ, Weinstein PR, Carlson S, Cummins R. Reversible middle cerebral artery occlusion without craniectomy in rats. Stroke. 1989;20(1):84–91. doi: 10.1161/01.str.20.1.84. [DOI] [PubMed] [Google Scholar]
- Chen JL, et al. Therapeutic benefit of intravenous administration of bone marrow stromal cells after cerebral ischemia in rats. Stroke. 2001;32(4):1005–1011. doi: 10.1161/01.str.32.4.1005. [DOI] [PubMed] [Google Scholar]
- Chang M-W, Young M-S, Lin M-T. An inclined plane system with microcontroller to determine limb motor function of laboratory animals. J Neurosci Methods. 2008;168(1):186–194. doi: 10.1016/j.jneumeth.2007.09.013. [DOI] [PubMed] [Google Scholar]
- Gartshore G, Patterson J, Macrae IM. Influence of ischemia and reperfusion on the course of brain tissue swelling and blood-brain barrier permeability in a rodent model of transient focal cerebral ischemia. Exp Neurol. 1997;147(2):353–360. doi: 10.1006/exnr.1997.6635. [DOI] [PubMed] [Google Scholar]
- Chen F, et al. Rodent stroke induced by photochemical occlusion of proximal middle cerebral artery: Evolution monitored with MR imaging and histopathology. Eur J Radiol. 2007;63(1):68–75. doi: 10.1016/j.ejrad.2007.01.005. [DOI] [PubMed] [Google Scholar]
- Almenning I, Rieber-Mohn A, Lundgren KM, Lovvik TS, Garnaes KK, Moholdt T. Effects of high intensity interval training and strength training on metabolic, cardiovascular and hormonal outcomes in women with polycystic ovary syndrome: a pilot study. PLoS One. 2015;10(9) doi: 10.1371/journal.pone.0138793. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Costigan SA, Eather N, Plotnikoff RC, Taaffe DR, Lubans DR. High-intensity interval training for improving health-related fitness in adolescents: a systematic review and meta-analysis. Br J Sports Med. 2015;49(19) doi: 10.1136/bjsports-2014-094490. [DOI] [PubMed] [Google Scholar]