

Abstract
Introduction Minimally invasive operative techniques are being used increasingly in gynaecological surgery. The expansion of the laparoscopic operation spectrum is in part the result of improved imaging. This study investigates the practical advantages of using 3D cameras in routine surgical practice.
Materials and Methods Two different 3-dimensional camera systems were compared with a 2-dimensional HD system; the operating surgeonʼs experiences were documented immediately postoperatively using a questionnaire.
Results Significant advantages were reported for suturing and cutting of anatomical structures when using the 3D compared to 2D camera systems. There was only a slight advantage for coagulating. The use of 3D cameras significantly improved the general operative visibility and in particular the representation of spacial depth compared to 2-dimensional images. There was not a significant advantage for image width. Depiction of adhesions and retroperitoneal neural structures was significantly improved by the stereoscopic cameras, though this did not apply to blood vessels, ureter, uterus or ovaries.
Conclusion 3-dimensional cameras were particularly advantageous for the depiction of fine anatomical structures due to improved spacial depth representation compared to 2D systems. 3D cameras provide the operating surgeon with a monitor image that more closely resembles actual anatomy, thus simplifying laparoscopic procedures.
Key words: laparoscopy, 3D, advantage, clinical use
Zusammenfassung
Einleitung In der gynäkologischen Chirurgie sind minimalinvasive Operationsmethoden zunehmend auf dem Vormarsch. Die Erweiterung des laparoskopischen OP-Spektrums resultiert u. a. aus einer zunehmenden Verbesserung der Bildgebung. In dieser Arbeit wird untersucht, welche praktischen Vorteile der Einsatz von 3-D-Kameras in der operativen Routine mit sich bringt.
Material und Methoden Es wurden 2 unterschiedliche 3-dimensionale Kamerasysteme mit einem 2-dimensionalen HD-System verglichen. Direkt postoperativ wurden hierzu die Erfahrungen der Operateure mittels Fragebogen erhoben.
Ergebnisse Im Vergleich zum 2-D-Kamerasystem ergaben sich signifikante Vorteile durch die Verwendung von 3-D-Kamerasystemen beim Nähen und Schneiden von Strukturen. Dagegen waren die Vorteile beim Koagulieren nur gering. Die allgemeinen Sichtverhältnisse und insbesondere die Tiefendarstellung des Raumes war durch die Verwendung von 3-D-Kameras signifikant verbessert im Vergleich zum 2-dimensionalen Bild. Dagegen zeigte sich in der Bildbreitendarstellung kein signifikanter Vorteil der stereoskopischen Kameras. Die Darstellung von Adhäsionen und nervalen Strukturen des Retroperitoneums zeigte sich bei 3-D-Kameras signifikant verbessert. Diese Signifikanz war bei Gefäßen, Ureter, Uterus und Ovarien nicht gegeben.
Schlussfolgerung Durch die räumliche Tiefendarstellung ergaben sich besonders signifikante Vorteile gegenüber 2-dimensionalen Kameras bei der Darstellung feiner anatomischer Strukturen. Mit dem Einsatz von 3-D-Kameras wird dem Operateur ein dem realen Situs näheres Monitorbild vermittelt. Daraus resultiert eine Erleichterung des laparoskopischen Operierens.
Schlüsselwörter: Laparoskopie, 3-D, Vorteil, klinischer Nutzen
Introduction
In recent years there has been a sharp increase in the use of minimally invasive operative techniques in gynaecological surgery. Various studies have shown that minimally invasive surgery has advantages over open surgery for simple and moderately difficult procedures 1, 2, 3, 4, 5.
The expansion of the spectrum of laparoscopic operations is largely due to technical advances. These include the development of special instrumentation, e.g. ultrasonic scissors, and most importantly, improved optics. The introduction of HD (= high definition) cameras and monitors improved the visual depiction of anatomical structures, which operating surgeons experience as advantageous, and improves operative safety 6.
A 3-dimensional camera system was used in gynaecology for the first time in 1993 7. The stereoscopic, i.e. 3-dimensional (= 3D) view lead to a significant reduction of time in operative steps. This time-saving was particularly relevant for complex procedures 8.
With the da Vinci robotic surgical system a 3D camera system was widely used in endoscopic surgery for the first time. This system is an expensive alternative to open and laparoscopic surgery.
For example, given sufficient case numbers, the extra cost of a pyeloplasty using a robot instead of laparoscopic surgery is estimated at 20 % 9. Today more and more 3D camera systems of various types are becoming available for conventional laparoscopic surgery.
In our hospital we offer the full spectrum of laparoscopic operations, including radical carcinoma surgery. These procedures are mostly performed using a 2D video system, though the da Vinci operating robot is also used.
From the patient perspective the minimally invasive surgical approach has significant advantages, such as less postoperative pain and need for analgesics, shorter hospital stay, quicker return to normal daily activities and, not least, better cosmetic results 10, 11.
Despite these patient factors laparoscopic surgery has a number of disadvantages from the surgeonʼs perspective, such as limited scope for movement and restricted instrument ergonometry, which together result in increased stress levels for the operating surgeon 11, 12, 13. Technical innovations can reduce this stress. We tested two 3D camera systems to investigate whether, and in which surgical situations, 3D intraoperative imaging is advantageous. The benefits of 3D laparoscopy systems with respect to precision and efficiency have been shown under experimental conditions in numerous studies 14, 15, 16, 17, 18, 19. In our study the systems were implemented in real, everyday surgical situations.
Two skills are paramount for performing laparoscopic surgery: firstly the ability to convert 2D information into a 3D understanding of the anatomy, and secondly hand-eye coordination 20.
The aim of this study was to test the suitability of 3D camera systems for everyday use and to elucidate whether, and in which operative situations, 3D imaging is beneficial compared to 2D systems.
Materials and Methods
Test modalities
Two 3D camera systems were tested by a total of 5 experienced surgeons. Following initial training in the use of the systems by product representatives from the respective firms there was a 3-week familiarisation phase in which the 5 trained operating surgeons undertook operations of all grades of difficulty in order to develop a degree of routine in using the camera systems, and to become accustomed to the 3D view.
Thereafter followed the actual test phase of the study in which both systems were in routine use on a daily basis over a number of consecutive weeks.
The systems were used for operations of diverse levels of difficulty, the surgeons completing a questionnaire after each procedure. In addition to the set questions the questionnaire allowed for free comment on the imaging apparatus used.
A total of 257 operations were performed using both 3D camera systems. Of these, 134 were performed with the 3D camera from the manufacturer Storz, and 123 with the camera manufactured by Aesculap. An additional 146 operations were performed with the Storz 2D system (Fig. 1).
Fig. 1.
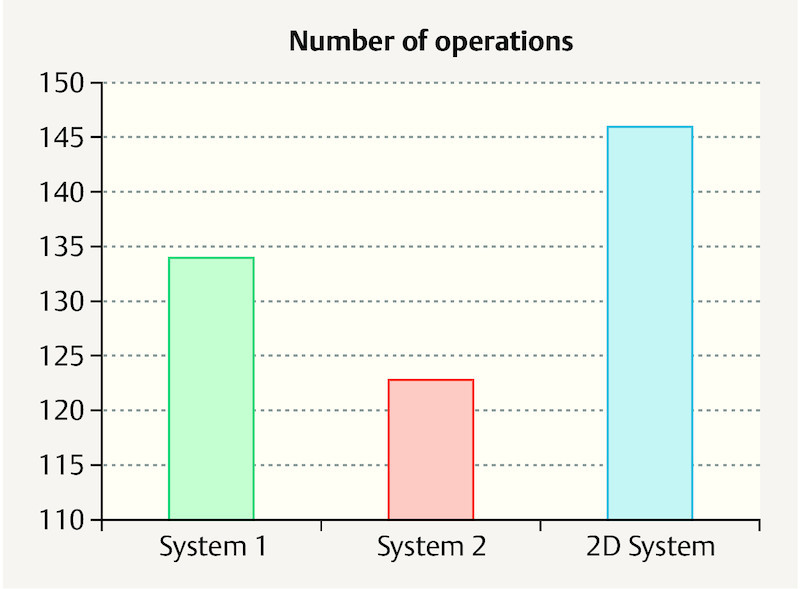
Number of operations using the various systems; system 1 = Storz 3D system, system 2 = Aesculap 3D system; Sturz 2D HD system.
Study laparoscopy systems
The systems tested were the Karl Storz 3-D-System (Karl Storz GmbH & Co. KG, Tuttlingen), in this article subsequently referred to as system 1, and the EinsteinVision® System (Aesculap AG & Co. KG, Tuttlingen/B. Braun Melsungen AG, Melsungen), subsequently referred to as system 2. Modified versions of both systems are now available, thus neither of the producers will have been disadvantaged by this article. (Indeed, the Aesculap system has since been significantly modified and is no longer controlled by the robotic arm described here). The tested systems differed fundamentally in terms of camera control: the camera of the Aesculap EinsteinVision® system was steered using a remotely controlled robotic arm in a sterile sleeve; the Storz 3D camera was guided freehand.
Data acquisition
The questionnaire contained 9 main questions, some of which were subdivided into further questions making a total of 18 questionnaire points (Table 1).
Table 1 List of study parameters.
| Camera control |
| View |
|
| Manual actions |
|
| Depiction of anatomical structures |
|
| Movement |
| Lens fogging |
| Overall assessment compared to 2D systems |
| Autofocus function (only offered by one system) |
| Instrumentation |
Each questionnaire point was rated from 1 to 5 with 1 representing a significant improvement, and 5 a negative rating. The systems were used in routine practice on an alternating basis.
Statistics
Statistical analysis was carried out with the program SOFA Statistics version 1.4.1. Analysis of the normally distributed groups was conducted using the Mann-Whitney U test, Fisherʼs exact test and the χ2 test.
Results
Camera control
Although the two camera systems were constructed very differently, they received similar ratings from surgeons. The mean score of 2.37 (median = 2; SD = 0.90) for the Aesculap system was almost identical to that (2.38) of the Storz unit (median = 2; SD = 0.99). With a p-value of 0.853 the difference between the systems was not significant.
Since the external assembly of the Storz 3D system did not differ from the 2D system from the same manufacturer, the camera guidance of the 2D system was not assessed separately. In the free comments section of the questionnaire it was repeatedly reported that the 3D camera heated up more markedly than the 2D camera and this was experienced as uncomfortable.
Manual actions
The manual actions evaluated were coagulating, cutting anatomical structures and suturing.
Table 2 shows the mean scores and p-values achieved by the different 3D systems for each of these actions. No significant differences were found between the two systems.
Table 2 Rating of manual actions for the different 3D systems.
| System 1 (mean) | System 2 (mean) | p-value | |
|---|---|---|---|
| Suturing | 1.63 | 1.67 | 0.83 |
| Cutting | 1,71 | 1.77 | 0.86 |
| Coagulating | 2.2 | 2.42 | 0.73 |
Table 3 shows the manual actions for all three systems. On comparison of system 1 with the 2D HD system it is notable that suturing (system 1: mean 1.63 vs. 2D system: mean 3.4; p = 0,044) and cutting (system 1: mean 1.71 vs. 2D system: mean 2.8; p = 0.049) were significantly improved using 3D imaging. Coagulation was only slightly, non-significantly improved (system 1: mean 2.52 vs. 2D system: mean 3.1; p = 0.11).
Table 3 Manual actions for 3D systems 1 and 2 compared to the 2D system.
| System 1 (mean) | 2D system | p-value | System 2 (mean) | 2D system | p-value | |
|---|---|---|---|---|---|---|
| Suturing | 1.63 | 3.4 | 0.044 | 1.67 | 3.4 | 0.047 |
| Dissecting | 1.71 | 2.8 | 0.049 | 1.77 | 2.8 | 0.0496 |
| Coagulating | 2.52 | 3.1 | 0.11 | 2.42 | 3.1 | 0.093 |
Performing manual actions with system 2 was also improved compared to the 2D system, for suturing (system 2: mean 1.67 vs. 2D system: mean 3.4; p = 0.047) and dissecting (system 2: mean 1.77 vs. 2D system: mean 2.8; p = 0.0496) significantly, and for coagulating non-significantly (system 2: mean 2.42 vs. 2D system 3.1; p = 0.093) (Table 3).
General visibility and spacial (operative field) depth
Operative visibility in general was rated better for both 3D systems compared to the 2D system (system 1: mean 1.44; median = 1, SD = 0.63 and system 2: mean 1.60; median = 2, SD = 0.64 vs. 2D system: mean 3.1; median = 2, SD = 0.51). There was no difference between the two 3D cameras on comparison with one another (system 1: mean 1.44 vs. system 2: mean 1.6; p = 0.53).
The subjective improvement in general visibility with 3D technology vs. the 2D lens was significant for both system 1 (mean 1.44 vs. 3.1; p = 0.041) and system 2 (mean 1.60 vs. 3.1; p = 0.049) respectively.
Similar to these findings for general visibility, the two 3D units did not differ from one another in their ratings for spacial depth depiction. The mean score for the Aesculap system was 1.49 (median = 1; SD = 0.56) and for the Storz unit 1.63 (median = 2; SD = 0.62; p-value = 0.15). In comparison, the 2D system had a mean score of 3.24 for this parameter (median = 2; SD = 0.64) making the improvement significant for system 1 (mean 1.63 vs. 3.24; p = 0.019) and highly significant for system 2 (mean 1.49 vs. 3.24; p = 0.01) compared to the 2D camera.
Image (operative field) width
For image width system 1 was rated at a mean score of 2.51 and system 2 at a mean of 2.48; a non-significant difference (p = 0.88) between the systems.
The 2D camera system was rated at a mean of 2.63 so that for this parameter there was no significant difference compared to system 1 (p = 0.83) or system 2 (p = 0.78).
Depiction of anatomical structures
Table 4 shows the mean scores of the different camera systems for the depiction of various pelvic anatomical structures. For the retroperitoneum the ability to visualise neural structure was rated.
Table 4 Mean scores of the different camera systems for depiction of various anatomical structures.
| Blood vessels (mean) | Ureter (mean) | Uterus (mean) | Ovaries (mean) | Adhesions (mean) | Retroperitoneum (mean) | |
|---|---|---|---|---|---|---|
| System 1 | 2.25 | 2.31 | 1.91 | 1.75 | 1.41 | 1.32 |
| System 2 | 1.96 | 2.44 | 1.83 | 1.81 | 1.45 | 1.42 |
| 2D system | 2.83 | 2.83 | 2.79 | 2.58 | 2.67 | 3.01 |
There were no significant differences between the two 3D camera systems for the various anatomical structures. Both 3D systems improved visualisation of the uterus and ovaries but not significantly. In contrast, they improved visualisation of nerves (mean 1.32 [system 1] vs. mean 3.01 [2D system], p = 0.03; mean 1.42 [system 2] vs. mean 3.01 [2D system], p = 0.04) and adhesions (mean 1.41 [system 1] vs. mean 2.67 [2D system], p = 0.0497; mean 1.45 [system 2] vs. mean 2.67 [2D system], p = 0.0499) significantly in comparison to 2D depiction.
Movement
Since the Aesculap camera system was guided by a robotic arm no comparison was made with the manually controlled cameras. Only differences between the Storz 3D and 2D systems were captured. The mean score of 2.11 (median = 2; SD = 0.39) for the 2D camera was not significantly different to the mean of 2.83 (median = 2; SD = 0.55) for the 3D camera (Storz) (p = 0.37). In the free comment section it was noted, however, that rapid movements with the 3D camera sometimes caused the surgeons to feel dizzy.
Lens fogging
Fogging over of the lens is a well-known technical problem in laparoscopy. The manually controlled Storz systems had the advantage that they could be removed from the operative field for cleansing much more quickly than the Aesculap system, which was fixed by a robotic arm. For this reason we only analysed the frequency of lens fogging.
The mean score for the 2D system was 2.94 (median = 3; SD = 0.21); the mean for system 1 was 3.01 (median = 3; SD = 0.36) and for system 2 was 2.86 (median = 3; SD = 0.33) (p = 0.57 for comparison of the two 3D systems to one another, p = 0.87 for comparison of system 1 to 2D, and p = 0.84 for comparison of system 2 to 2D).
Overall comparison of 3D and 2D systems
Here surgeons were questioned whether, in their opinion, the use of 3D cameras improves/simplifies operating conditions.
The Storz 3D system was rated at a mean score of 1.94 and the Aesculap camera at 1.89 (p = 0.87 between the two 3D cameras). The 2D camera was rated at mean of 2.67. The improvement was not significant for both system 1 (p = 0.08) and system 2 (p = 0.073) on comparison with the 2D lens.
Autofocus
Only the Storz system had an integrated autofocus, which was found to react quickly and function reliably in routine use. It received an average score of 1.63 for the 134 operations (median = 2, SD = 0.62).
Discussion
Both 3D systems proved suitable for routine use in our setting. The systems differed in that the Aesculap EinsteinVision® camera offered full HD resolution and robotic arm control, whereas the 3D camera manufactured by Storz had an integrated autofocus that automatically regulated image sharpness. Despite these differences the two camera concepts received similar ratings for controllability by surgeons (2.38 for manual control and 2.37 for robotic arm).
This very similar rating may have resulted from the fact that the two systems were not used in parallel, but rather on an alternating basis over a period of weeks. Both cameras had their advantages: surgeons appreciated the reliable autofocus on the one, and by the more realistic anatomical depiction of the other. The ideal solution would seem to be a combination of these two technologies.
The value of recently available 4K 2D technology (4-fold HD resolution) compared to 3D HD technology has not yet been studied.
The two study systems both had advantages and disadvantages in terms of camera control. The Aesculap camera was significantly bigger and heavier than the Storz camera, making prolonged manual steering problematic. However the robotic arm control allowed continuous movement and made smaller procedures possible practically without the need for an assistant.
In contrast, the much smaller and lighter Storz camera could be manually controlled even for longer operations without difficulty. The disadvantage was relatively marked heat generation, which surgeons found uncomfortable.
Since there was not a comparable robotic arm system from the Storz company, this camera was not rated on this point.
3D monitors have a lower levels of brightness than 2D monitors, meaning that the operating room must be dimmed more strongly 26. Also, to achieve the 3-dimensional effect special glasses must also be worn, which surgeons often found uncomfortable 27, 30. Both points are considered technical disadvantages of 3D imaging.
As shown in Tables 2, 3 and 4 both stereoscopic cameras achieved very good (and comparable) results for suturing and cutting (no significant difference between cameras). In comparison, the 2D HD camera system was rated significantly worse. Results were different for the third manual action, coagulation. For this parameter there were not significant differences between the two 3D systems and the 2D lens.
Coagulating under 3D imaging was rated noticeably worse than the other manual actions. The reason for this – as noted in the free comment section – was the more vivid depiction of coagulation smoke particles, which surgeons found bothersome. Our analysis is consistent with the findings of numerous other authors who have shown that the use of stereoscopic cameras improves manual actions. However, in contrast to our study, these trials examined standardised manual procedures in the laboratory setting, with the measured parameter being time 21, 22, 23, 24, 25, 27, 34, 41, 45, 46, 47.
Using a 2D system causes a change in visual perception through reduced depiction of spatial depth 28. 2D laparoscopy is more challenging for surgeons than open surgery because of this loss of depth perception 29, 30. 3D laparoscopy attempts to resolve this perceptual problem: these 3D video systems bring stereoscopic vision back to the endoscopic surgeon 32, 33, 34, 35, 36, 37.
Wey et al. showed that visual misinterpretation in 2-dimensional laparoscopy was responsible for 97 % of errors during laparoscopic surgery 31, and Alarami et al. found that the improved depth perception provided by 3D laparoscopy improves the quality of laparoscopic surgery, and may also improve patient safety 27.
General visibility did not differ significantly between the two 3D systems used in this study with ratings of 1.44 for system 1 and 1.6 for system 2. In contrast, it was significantly better with both stereoscopic cameras compared to the 2D lens. There was only a slight difference between the two 3D cameras for spatial depth representation, whereas the differences between the 2D camera and the two 3D cameras were significant to very significant (p-values = 0.019 and 0.01 respectively). Analogous to our study Jones et al. found that the improved depth depiction was the most important advantage of 3D camera systems 41. This result is also supported by notes in the free comment section of the questionnaire.
Whereas the 3D system provided major improvements in spatial depth appreciation, there were only marginal differences between the two camera units in terms of image width.
There were no major differences between the two 3D camera systems in terms of viewing the various anatomical structures, including adhesions.
On comparison with the 2-dimensional system, both 3D cameras provided better images of the uterus, ovaries, ureters and blood vessels (difference non-significant), and significantly improved depiction of adhesions and retroperitoneal nerves.
Thus 3D lens technology was particularly advantageous for finer structures (such as adhesions and nerves), and less so for larger anatomical structures (such as ureters, blood vessels, ovaries and uterus).
On analysis of camera mobility the manually controlled 3D camera was rated worse than the 2D system, though the difference was non-significant. (No comparison was made between the Storz system and the much bigger, heavier Aesculap camera, which, because of its size and weight, was mainly controlled via robotic arm). The reason for this poor rating was identified in the free comment section of the questionnaire: Surgeons reported that quick movements with the 3D camera repeatedly caused brief dizziness and nausea, which was experienced as unpleasant. This has been known to be one of the problems with 3D technology for some time, as reported by Mueller et al. and Chan et al. 25, 38, 39. A stereoscopic error can be assumed causative, since the setting was the same for all surgeons. These unwanted effects such as headache, dizziness and nausea have often been described, the individual studies reporting them, however, coming to varying conclusions 30, 40, 41, 42, 43.
Overall, however, it is evident that these unwanted effects of 3D technology are reported less often in more recent studies, most likely due to improved image quality 27, 30, 34, 44.
Lens fogging, which results from e.g. coagulating or inserting the camera lens from the relatively cool room temperature into the warmer peritoneal cavity, occurred to the same extent with all lenses.
On overall rating of the 2D camera (mean 2.67) compared to the two 3D units (system 1: mean 1.94; system 2: mean 1.89) there was a clear, yet non-significant difference (p-value = 0.08 and 0.073 for systems 1 and 2 respectively).
Despite very different construction, both these 3D camera systems improve surgical conditions, providing benefit for surgeons and patients alike.
Conclusions
For the surgeon
This 3D technology provides surgeons with additional information on spatial depth and improved, vivid depiction of anatomical structures. As a result, performing manual procedures is simplified; the camera imaging of the surgical field more closely resembles operating conditions at open surgery.
For the surgeon, this more realistic anatomical depiction may reduce stress.
For the patient
This 3D technology simplifies the performance of more difficult operative steps, which may reduce operating time. These operator advantages improve patient safety.
In addition it is possible to perform more complex operations using the minimally invasive approach. For the patient, this means shorter convalescence compared to open surgery.
A weakness of this study is that the results are based on the subjective assessment of surgeons and not on objective measures of standardised procedures.
However herein also lies the strength of the study. We tested to what extent 3D technology was advantageous for a large number of operations of all levels of difficulty, and whether it was suitable for routine use.
Overall 3D imaging improved operative visibility, particularly through adding spacial depth appreciation. This additional aspect of vividness firstly was of significant benefit for the depiction of anatomy, particularly finer structures, and secondly it significantly simplified complex surgical procedures such as suturing.
In this study 3D technology proved fully suitable for routine use. It significantly improved operating conditions, for the surgeon simplifying procedures, and as a consequence, improving patient safety.
Einleitung
In den letzten Jahren sind in der gynäkologischen Chirurgie minimalinvasive Operationsmethoden stark auf dem Vormarsch. In verschiedenen Untersuchungen konnte gezeigt werden, dass die minimalinvasive Chirurgie bei leichten und mittelschweren Eingriffen Vorteile im Vergleich zur offenen Chirurgie zeigt 1, 2, 3, 4, 5.
Die Erweiterung des laparoskopischen Operationsspektrums ist zu einem großen Teil der Weiterentwicklung der technischen Geräte zu verdanken. Hierzu zählen zum einen besondere Instrumente, wie bspw. Ultraschallscheren, zum anderen ist aber vor allem die Verbesserung der optischen Darstellung zu nennen. Mit der Einführung von HD-(= high-definition-)Kameras und Monitoren verbesserte sich die Darstellung der anatomischen Strukturen, was vom Operateur als vorteilhaft empfunden wird und die operative Sicherheit erhöht 6.
Der erste Einsatz eines 3-dimensionalen Kamerasystems in der Gynäkologie erfolgte bereits im Jahre 1993 7. Die stereoskopische, also 3-dimensionale (= 3-D) Sicht, führte hierbei zu einer signifikanten Verkürzung von Operationsschritten. Diese Zeitersparnis ist besonders bei komplexen Tätigkeiten erkennbar 8.
Mit dem Einsatz des DaVinci-Operationsroboter-Systems wurde auch erstmalig breitflächig ein 3-D-Kamerasystem in der endoskopischen Chirurgie verwendet. Dieses System zeigt sich als kostenintensive Alternative zur offenen bzw. laparoskopischen Chirurgie.
So wurde errechnet, dass bspw. die Mehrkosten bei einer Pyeloplastik, die mittels Roboter anstatt laparoskopisch durchgeführt wurde, um 20 % höher liegen, bei ausreichend großer Fallzahl 9.In zunehmendem Maße sind nun auch unterschiedliche 3-D-Kamerasysteme für die konventionelle laparoskopische Chirurgie verfügbar.
In unserer Klinik wird das gesamte laparoskopische Spektrum, bis hin zur radikalen Karzinomchirurgie, angeboten. Diese Eingriffe werden überwiegend mittels 2-D-Videosystemen durchgeführt, wobei aber auch der DaVinci-Operationsroboter verwendet wird.
Aus Sichtweise der Patientinnen ergeben sich durch das minimalinvasive Vorgehen deutliche Vorteile, wie reduzierte postoperative Schmerzen mit einem niedrigeren Analgetikaverbrauch, eine kürzere Hospitalisierungsdauer, eine schnellere Rückkehr zu den alltäglichen Aktivitäten und nicht zuletzt auch ein besseres kosmetisches Ergebnis 10, 11.
Trotz der Vorteile der laparoskopischen Chirurgie für die Patientin ergeben sich doch eine Reihe von Nachteilen aus Sicht des Operateurs, wie die reduzierten Bewegungsgrade und die eingeschränkte Ergonomie der Instrumente, was insgesamt für den Operateur mit einem vermehrten Stress einhergeht 11, 12, 13. Diese erhöhte Belastung für den Operateur kann durch technische Neuerungen reduziert werden. Um zu überprüfen, ob und in welchen operativen Situationen 3-D-Kameras Vorteile erbringen, wurden von uns 2 3-D-Kamerasysteme getestet. Unter experimentellen Bedingungen konnten bereits mehrfach die Vorteile von 3-D-Laparoskopiesystemen in Bezug auf Präzision und Effizienz gezeigt werden 14, 15, 16, 17, 18, 19. In unserem Fall erfolgte der Einsatz unter realen alltäglichen Operationsbedingungen.
Bei den operativen laparoskopischen Fähigkeiten sind 2 Voraussetzungen von höchster Bedeutung. Zum einen die Umsetzung einer 2-D-Information in einen 3-D-Situs und zum anderen die psychomotorische Hand-Augen-Koordination 20.
Ziel dieser Untersuchung war es, die Alltagstauglichkeit von 3-D-Kamerasystemen zu testen und zu eruieren, ob und in welchen Operationssituationen die 3-D-Darstellung Vorteile im Vergleich zur 2-D-Darstellung bietet.
Material und Methoden
Testmodalitäten
Es wurden 2 3-D-Kamerasysteme von insgesamt 5 erfahrenen Operateuren getestet.
Nachdem alle 5 Operateure jeweils eine Geräteschulung durch einen Produktmanager der jeweiligen Firma erhalten hatten, erfolgte eine 3-wöchige Eingewöhnungsphase. In dieser Phase wurden von den geschulten Operateuren Eingriffe aller Schwierigkeitsgrade vorgenommen, um eine gewisse Routine im Umgang mit den Kamerasystemen zu entwickeln und sich an die 3-D-Darstellung der Strukturen zu gewöhnen.
Danach erfolgte dann die eigentliche Testphase, in der beide Systeme über mehrere Wochen nacheinander im täglichen Routineeinsatz waren.
Die Systeme wurden bei Operationen unterschiedlichster Schwierigkeitsgrade eingesetzt. Die Operateure füllten nach jeder Operation einen Fragebogen aus. Hier war es möglich, außer den Antworten auf die schon vorgegebenen Fragen noch einen freien Kommentar zur verwendeten Optik anzufügen.
Insgesamt wurden mit beiden 3-D-Kamerasystemen 257 Operationen durchgeführt. Davon wurden mit der 3-D-Kamera der Firma Storz 134 und mit der der Firma Aesculap 123 Operationen vorgenommen. Mit dem 2-D-System der Firma Storz waren es 146 Eingriffe (Abb. 1).
Abb. 1.
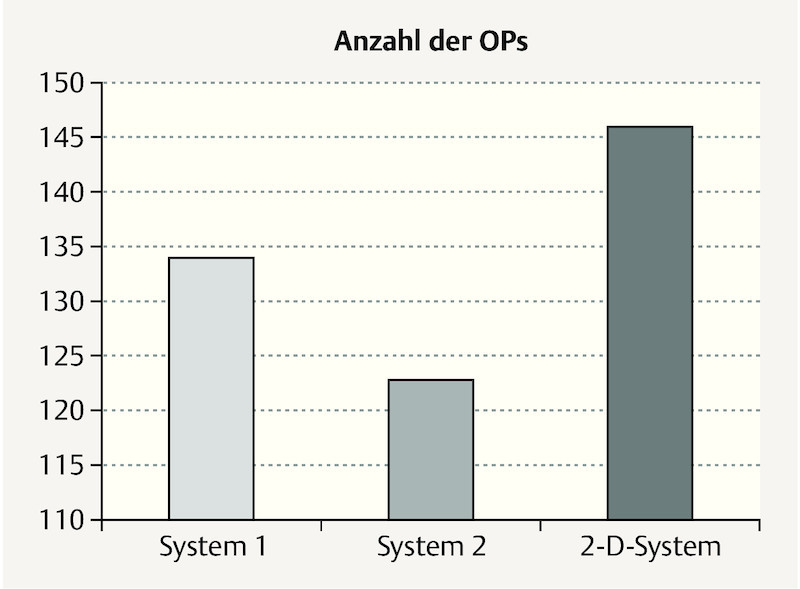
Anzahl der mit den verschiedenen Systemen durchgeführten Operationen; System 1 = 3-D-System Storz, System 2 = 3-D-System Aesculap; 2-D-HD-System Storz.
Eingesetzte Laparoskopiesysteme
Bei den getesteten Systemen handelte es sich um das Karl Storz 3-D-System (Karl Storz GmbH & Co. KG, Tuttlingen), im Verlauf als System 1 bezeichnet, und das Einstein Vision System® (Aesculap AG & Co. KG, Tuttlingen/B. Braun Melsungen AG, Melsungen), als System 2. Beide Systeme sind mittlerweile in modifizierten Versionen erhältlich, sodass durch diesen Artikel keiner der Anbieter einen Nachteil erfahren kann. Das System von Aesculap wurde sogar deutlich modifiziert, sodass jetzt die Kameraführung mittels Roboterarm hier entfällt. Bei der Kameraführung unterscheiden sich die beiden getesteten Systeme grundsätzlich. Die Kamera des Einstein Vision Systems von Aesculap wurde mittels steril überzogenem Roboterhaltearm geführt, der per Fernbedienung gesteuert wurde, während die 3-D-Kamera der Firma Storz freihändig geführt wurde.
Befragungsmodalitäten
Der Fragebogen bestand aus 9 Hauptfragegruppen. Diese waren z. T. nochmals untergliedert, sodass insgesamt 18 Punkte abgefragt wurden (Tab. 1).
Tab. 1 Auflistung der erhobenen Parameter.
| Kameraführung |
| Sicht |
|
| manuelle Tätigkeiten |
|
| Darstellung anatomischer Strukturen |
|
| Bewegung |
| Beschlagen der Optik |
| Endbeurteilung im Vergleich zu 2-D-Systemen |
| Autofokusfunktion (wurde nur von einem System angeboten) |
| Instrumentierung |
Die Beurteilung der verschiedenen Punkte erfolgte anhand einer Bewertung von 1 bis 5. Der Wert 1 stellte eine deutliche Verbesserung und die Bewertung von 5 eine Verschlechterung dar. Die Systeme wurden jeweils nacheinander im Routinebetrieb eingesetzt.
Statistische Methoden
Die statistische Auswertung wurde mit dem Programm SOFA-Statistics Version 1.4.1 durchgeführt. Die Auswertung der normalverteilten Gruppen erfolgte mit dem Mann-Whitney U-Test, dem exakten Test nach Fisher sowie dem χ2-Test.
Ergebnisse
Bewertung Kameraführung
Obwohl beide Kamerasysteme in ihrem Grundaufbau sehr unterschiedlich waren, zeigten sich doch vergleichbare Bewertungen. Das Aesculap-System wies einen Mittelwert von 2,37 (Median = 2; SD = 0,90) im Vergleich zur Storz-Einheit mit einem fast identischen Mittelwert von 2,38 (Median = 2; SD = 0,99) auf. Diese Werte waren mit einem p-Wert von 0,853 nicht signifikant different.
Da sich das 3-D-System der Firma Storz vom äußeren Aufbau nicht wesentlich vom 2-D-System der gleichen Firma unterschied, wurde hier die Kameraführung des 2-D-Systems nicht extra ausgewertet. Aus den freien Kommentaren ging hervor, dass die 3-D-Kamera im Vergleich zur 2-D-Kamera eine stärkere Wärmeentwicklung zeigte, was wiederholt als unkomfortabel empfunden wurde.
Bewertung manueller Tätigkeiten
Bei den manuellen Tätigkeiten wurden durch den Fragebogen die Koagulation, das Durchtrennen von Strukturen und das Nähen abgefragt.
In Tab. 2 sind die Mittelwerte und p-Werte beider verwendeter 3-D-Systeme für diese Tätigkeiten aufgeschlüsselt. Hier ist erkennbar, dass es zwischen beiden Systemen keinen signifikanten Unterschied im Bereich der manuellen Tätigkeiten gibt.
Tab. 2 Bewertung der manuellen Tätigkeiten der beiden 3-D-Systeme.
| MW System 1 | MW System 2 | p-Wert | |
|---|---|---|---|
| Nähen | 1,63 | 1,67 | 0,83 |
| Schneiden | 1,71 | 1,77 | 0,86 |
| Koagulieren | 2,52 | 2,42 | 0,73 |
Tab. 3 stellt die Bewertungen der manuellen Operationsprozeduren mit den 3 Systemen dar. Beim Vergleich von System 1 mit dem 2-D-HD-System ist erkennbar, dass das Nähen mit MW 1,63 (System 1) vs. MW 3,4 (2-D-System) (p = 0,044) und auch das Schneiden mit MW 1,71 (System 1) vs. MW 2,8 (2-D-System) (p = 0,049) signifikant besser durchführbar sind unter Verwendung einer 3-D-Optik. Eine nur geringe, nicht signifikante Verbesserung ist beim Koagulieren mit MW 2,52 (System 1) vs. MW 3,1 (2-D-System) (p = 0,11) erkennbar.
Tab. 3 Vergleich der manuellen Tätigkeiten der 3-D-Systeme 1 und 2 mit dem 2-D-System.
| MW System 1 | 2-D-System | p-Wert | MW System 2 | 2-D-System | p-Wert | |
|---|---|---|---|---|---|---|
| Nähen | 1,63 | 3,4 | 0,044 | 1,67 | 3,4 | 0,047 |
| Schneiden | 1,71 | 2,8 | 0,049 | 1,77 | 2,8 | 0,0496 |
| Koagulieren | 2,52 | 3,1 | 0,11 | 2,42 | 3,1 | 0,093 |
Auch bei der Durchführung der operativen Tätigkeiten mit dem System 2 der 3-D-Systeme zeigte sich beim Nähen und Schneiden mit MW 1,67 (System 2) vs. MW 3,4 (2-D-System) p = 0,047 bzw. MW 1,77 (System 2) vs. MW 2,8 (2-D-System) p = 0,0496 eine signifikante und beim Koagulieren mit MW 2,42 (System 2) vs. MW 3,1 (2-D-System) p = 0,093 eine nicht signifikante Verbesserung gegenüber der 2-D-Kamera (Tab. 3).
Bewertung der Sicht allgemein und zusätzlich der Tiefe des Raumes
In der Einstufung der allgemeinen Sichtverhältnisse war bei beiden 3-D-Systemen mit Mittelwerten von 1,60 (System 2) (Median = 2; SD = 0,64) bzw. 1,44 (System 1) (Median = 1; SD = 0,63) jeweils eine bessere Bewertung im Vergleich zu dem 2-D-System (Mittelwert = 3,1; Median = 2, SD = 0,51) erkennbar. Im Vergleich der 3-D-Kameras untereinander (System 1 MW 1,44 vs. System 2 MW 1,6) war kein signifikanter Unterschied erkennbar (p = 0,53).
Vergleicht man die 2-dimensionale Optik mit dem System 1 (MW 3,1 vs. 1,44; p = 0,041) bzw. mit dem System 2 (3,1 vs. 1,6; p = 0,049), war eine signifikante Verbesserung der allgemeinen Sicht durch Einsatz der 3-D-Technik empfunden worden.
Wie in der Analyse der allgemeinen Sichtverhältnisse gezeigt werden konnte, unterschieden sich beide 3-D-Einheiten auch nicht in der Darstellung der Raumtiefe voneinander. Hier lag der Mittelwert des Aesculap-Systems bei 1,49 (Median = 1; SD = 0,56) und der der Storz-Einheit bei 1,63 (Median = 2; SD = 0,62; p-Wert = 0,15). Die Bewertung der Raumtiefe des 2-D-Systems ergab einen Mittelwert von 3,24 (Median = 2; SD = 0,64). Daraus resultiert eine signifikante Verbesserung der Raumtiefendarstellung durch System 1 (MW 1,63 vs. 3,24; p = 0,019) und ein sehr signifikanter Vorteil mit der Verwendung von System 2 (MW 1,49 vs. 3,24; p = 0,01) im Vergleich zur 2-D-Kamera.
Die Darstellung der Bildbreite
Das System 1 wurde bez. der Breite der Bilddarstellung im Mittel mit 2,51 und das System 2 mit 2,48 bewertet. Dieser Unterschied war mit einem p-Wert von 0,88 nicht signifikant.
Das 2-D-Kamerasystem ergab einen Mittelwert von 2,63. Verglichen mit dem System 1 ergab sich hier mit p = 0,83 ebenso ein nicht signifikanter Unterschied wie auch im Vergleich zum System 2 (p = 0,78).
Darstellung anatomischer Strukturen
In Tab. 4 sind die Mittelwerte der optischen Systeme in Bezug auf die Darstellung diverser anatomischer Beckenstrukturen dargestellt. Im Retroperitonealraum wurde auf die Bewertung der Darstellbarkeit nervaler Strukturen abgezielt.
Tab. 4 Mittelwerte der verschiedenen optischen Systeme in der Beurteilung unterschiedlicher anatomischer Strukturen.
| MW Gefäße | MW Ureter | MW Uterus | MW Ovarien | MW Adhäsionen | MW Retroperitoneum | |
|---|---|---|---|---|---|---|
| System 1 | 2,25 | 2,31 | 1,91 | 1,75 | 1,41 | 1,32 |
| System 2 | 1,96 | 2,44 | 1,83 | 1,81 | 1,45 | 1,42 |
| 2-D-System | 2,83 | 2,83 | 2,79 | 2,58 | 2,67 | 3,01 |
Es zeigen sich zwischen den beiden 3-D-Kamerasystemen keine signifikanten Unterschiede in der Beurteilung der verschiedenen anatomischen Strukturen. Die Darstellung von Uterus und der Ovarien ist durch die 3-D-Kameras verbessert, jedoch nicht signifikant. Dagegen gelingt die Darstellung von Nerven (MW 1,32 [System 1] vs. MW 3,01 [2-D-System], p = 0,03 bzw. MW 1,42 [System 2] vs. MW 3,01 [2-D-System], p = 0,04) und Adhäsionen (MW 1,41 [System 1] vs. MW 2,67 [2-D-System], p = 0,0497 bzw. MW 1,45 [System 2] vs. MW 2,67 [2-D-System], p = 0,0499) mit den 3-dimensionalen Systemen signifikant besser als mit der 2-D-Kamera.
Bewegung
Aufgrund dessen, dass das Aesculap-Kamerasystem mittels Roboterarm gesteuert wurde, wurde hier kein Vergleich mit den manuell geführten Kameras gezogen. Somit werden die Differenzen nur zwischen der 3-dimensionalen und der 2-D-Kamera der Firma Storz dargestellt. Hierbei lag der Mittelwert bei 2,11 (Median = 2; SD = 0,39) für die 2-D-Kamera und bei 2,83 (Median = 2; SD = 0,55) für die 3-dimensionale (Storz) Kamera, was nicht signifikant war (p = 0,37). Die Auswertung der freien Kommentare zeigte jedoch, dass schnelle Bewegungen mit der 3-D-Kamera vereinzelt zu einem schwindelartigen Gefühl führten.
Beschlagen der Optik
Das Beschlagen der Kamera stellt eines der technischen Probleme der Laparoskopie dar. Die Systeme von Storz, die manuell geführt sind, hatten den Vorteil, dass diese deutlich zügiger zur Reinigung aus dem Situs entfernt werden konnten als das am Roboterarm fixierte System von Aesculap. Aus diesem Grunde sollte nur die Frequenz des Beschlagens der Optik bewertet werden.
Hierbei ergab sich für das 2-D-System ein Mittelwert von 2,94 (Median = 3; SD = 0,21), für das System 1 ein Wert von 3,01 (Median = 3; SD = 0,36) und das System 2 wurde im Mittel mit 2,86 (Median = 3; SD = 0,33) bewertet. Als p-Werte ergeben sich für den Vergleich der beiden 3-D-Systeme p = 0,57; System 1 mit dem 2-D-System p = 0,87 und System 2 mit dem 2-D-System p = 0,84.
Vergleich der 3-dimensionalen Optiken zum 2-D-System
Bei diesem Punkt sollte aus Sicht der Operateure erfragt werden, ob durch den Einsatz von 3-D-Kameras eine Verbesserung bzw. eine Erleichterung der operativen Bedingungen erreicht werden kann.
Das 3-D-Storz-System wurde von den Operateuren mit 1,94 im Mittel und die Aesculap-Kamera mit 1,89 bewertet. Daraus ergibt sich ein p-Wert von 0,87 zwischen beiden 3-D-Kameras. Die 2-D-Kamera wurde durchschnittlich mit 2,67 eingestuft. Das System 1 (p = 0,08) und das System 2 (p = 0,073) zeigten somit beide eine nicht signifikante Verbesserung im Vergleich zur 2-dimensionalen Optik.
Bewertung Autofokus
Eine eingebaute Autofokusfunktion hatte nur das System von Storz. Dieser Autofokus zeigte sich im Routineeinsatz als zuverlässig und schnell reagierend. Bei den 134 Operationen ergab sich ein Mittelwert von 1,63 mit einer Standardabweichung von 0,62 (Median = 2).
Diskussion
Beide 3-D-Systeme bewiesen im klinischen Einsatz ihre Alltagstauglichkeit. Als Unterschied konnte das Einstein-Vision-System der Firma Aesculap, im Vergleich zum Storz-System, mit einer Full-HD-Darstellung und einer Steuerung per Roboterarm aufwarten. Dagegen hatte die 3-D-Kamera der Firma Storz einen Autofokus, der die Schärfe des Bildes selbstständig nachregulierte. Trotz dieser Unterschiede wurden beide Kamerakonzepte von den Operateuren mit 2,38 für die manuell geführte Optik und 2,37 für die per Roboterarm gesteuerte Kamera fast gleich bewertet.
Diese sehr ähnliche Bewertung resultiert wohl am ehesten daraus, dass die beiden Systeme nacheinander im zeitlichen Abstand von mehreren Wochen und nicht parallel eingesetzt wurden. So empfanden die Operateure den zuverlässigen Autofokus der einen Kamera als vorteilhaft und bei dem anderen System dagegen die realitätsnähere HD-Bildgebung. Beide Kamerakonzepte zeigten ihre Vorteile und erklären so die fast gleiche Bewertung. Eine Kombination beider Techniken würde hier wohl eine Ideallösung darstellen.
Welchen Stellenwert die mittlerweile verfügbare 4 k 2-D-Technik, also die 4-fache HD-Auflösung im Vergleich zur 3-D-HD-Technologie hat, ist bisher noch nicht untersucht worden.
Bei der Kameraführung hatten beide Systeme jeweils ihre Vor- und Nachteile. Die Kamera von Aesculap war deutlich größer und schwerer im Vergleich zu der von Storz, wodurch eine Steuerung per Hand über einen längeren Zeitraum schwierig erscheint. Dagegen erlaubte die Bedienung mittels Roboterarm eine kontinuierliche Bewegung und ermöglichte es, dass kleinere Eingriffe praktisch ohne Assistenz durchführbar waren.
Die deutlich kleinere und leichtere Kamera von Storz dagegen konnte auch bei längeren Operationen problemlos manuell geführt werden. Als nachteilig erwies sich die relativ hohe Wärmeentwicklung dieser Kamera im Vergleich zur 2-D-Kamera, was als unangenehm empfunden wurde.
Da es zu dem Roboterarm keine vergleichbare Konstruktion der Firma Storz gab, wurde hier auf eine Bewertung dieses Systems verzichtet.
3-D-Monitore haben eine geringere Helligkeit als 2-D-Monitore, weshalb eine stärkere Abdunkelung des Operationssaals notwendig ist 26. Eine weitere Voraussetzung, um den 3-dimensionalen Effekt zu erzielen, ist das Tragen einer Brille, was von den Operateuren oft als unkomfortabel empfundenen wird 27, 30. Dies sind 2 technische Nachteile der 3-D-Darstellung.
Wie aus Tab. 2, 3 und 4 ersichtlich, zeigen sowohl beim Nähen als auch beim Schneiden beide stereoskopischen Kameras sehr gute und vergleichbare Ergebnisse, die nicht signifikant different voneinander waren. Demgegenüber wird das 2-D-HD-Kamerasystem signifikant schlechter bewertet. Bei der 3. manuellen Tätigkeit, dem Koagulieren, stellt sich die Situation anders dar. Hier zeigen sich zwischen den beiden 3-D-Systemen und der 2-D-Optik keine signifikanten Unterschiede.
Das Koagulieren wird unter 3-D-Sicht auffallend schlechter als die anderen manuellen Tätigkeiten eingestuft. Ursächlich hierfür ist die plastischere Darstellung der Schwebepartikel des Koagulationsrauchs, wie aus den schriftlichen Kommentaren der Operateure ersichtlich war, was als störend empfunden wurde. Wie in unserer Analyse, so konnten auch zahlreiche andere Autoren eine Verbesserung der manuellen Tätigkeit unter Verwendung stereoskopischer Kameras nachweisen. Hierbei handelte es sich jedoch, im Gegensatz zu unserer Untersuchung, um standardisierte manuelle Abläufe unter Laborbedingungen, bei denen der gemessene Parameter die Zeit war 21, 22, 23, 24, 25, 27, 34, 41, 45, 46, 47.
Durch die Verwendung von 2-D-Systemen kommt es zu einer veränderten visuellen Wahrnehmung, die durch die reduzierte Tiefenwahrnehmung hervorgerufen wird 28. Aufgrund des Verlusts der Tiefenwahrnehmung bei der 2-dimensionalen Laparoskopie stellt diese eine größere Herausforderung für den Operateur dar als die offene Operationstechnik 29, 30. Diese Wahrnehmungsprobleme der 2-dimensionalen Laparoskopie versucht die 3-D-Laparoskopie zu beheben. So bringen die 3-D-Videosysteme dem endoskopisch Operierenden die stereoskopische Sicht zurück 32, 33, 34, 35, 36, 37.
Way et al. zeigen, dass die visuelle Fehleinschätzung der 2-dimensionalen Laparoskopie zu 97 % die Ursache für Fehler bei laparoskopischen Operationen ist 31. Demgegenüber zeigten Alarami et al., dass die verbesserte Tiefenwahrnehmung bei der 3-D-Laparoskopie zu einer verbesserten Qualität der laparoskopischen Chirurgie und damit auch zu einer Verbesserung der Patientensicherheit führen kann 27.
Die Sichtverhältnisse zwischen beiden 3-D-Systemen zeigten in unserer Untersuchung, mit einer Bewertung von 1,44 für das System 1 bzw. 1,6 für das System 2, vergleichbare, nicht signifikante Unterschiede. Dagegen waren die Sichtbedingungen der stereoskopischen Kameras im Vergleich zur 2-D-Optik signifikant besser. Bei der Darstellung der Raumtiefe war zwischen den beiden 3-D-Kameras nur ein geringer Unterschied. Jedoch war der Unterschied zwischen der 2-dimensionalen Kamera zu den beiden 3-D-Kameras mit einem p-Wert von 0,019 bzw. 0,01 signifikant bzw. sehr signifikant. Analog zu unserer Untersuchung konnten auch Jones et al. zeigen, dass die verbesserte Tiefendarstellung den wichtigsten Nutzen der 3-D-Kamerasysteme darstellt 41. Dieses Resultat wird auch aus den freien Kommentaren der Operateure in unserer Studie nochmals untermauert.
Während die räumliche Tiefendarstellung eine gravierende Verbesserung durch die 3-D-Systeme erfuhr, zeigte die Darstellung der Bildbreite nur marginale Unterschiede zwischen den Kameraeinheiten.
Bei dem Vergleich der Darstellung verschiedener anatomischer Strukturen, wozu auch Adhäsionen gerechnet wurden, war erkennbar, dass es zwischen den beiden 3-D-Kamerasystemen keine gravierenden Unterschiede gab.
Uterus, Ovarien, Ureteren und Gefäße konnten mittels 3-D-Kameras jedoch nicht signifikant besser dargestellt werden. Dagegen war die Darstellung von Adhäsionen und retroperitonealer Nerven mittels der beiden 3-D-Systeme signifikant besser verglichen mit dem 2-dimensionalen System.
Aus dieser Tatsache ergibt sich, dass sich der Einsatz von 3-D-Technik bei filigraneren Strukturen wie Adhäsionen und Nerven als besonders vorteilhaft erweist. Bei größeren Organstrukturen wie Ureteren, Gefäßen, Ovarien oder des Uterus waren die Vorteile von 3-D-Optiken geringer.
Die Bewertung der Bewegungen der Kameras ergab, dass die manuell geführte 3-D-Kamera schlechter bewertet wurde als das 2-D-System. Der Unterschied stellte sich als nicht signifikant dar.
Ein Vergleich der deutlich schwereren und größeren Aesculap-Kamera, die deshalb wohl überwiegend mittels Roboterarm gesteuert wird, mit den Storz-Systemen erfolgte nicht.
Als Ursache für diese schlechtere Bewertung zeigte sich aus den freien Antworten der Operateure, dass gerade schnelle Bewegungen mit der 3-D-Kamera wiederholt zu kurzfristigen Schwindelgefühlen und Übelkeit führten, was als unangenehm empfunden wurde. Diese Problematik der 3-D-Technik ist schon länger bekannt und wurde auch von Mueller et al. und Chan et al. aufgezeigt 25, 38, 39. Da das Setting für alle Operateure gleich war, lässt sich hier als Hauptursache ein stereoskopischer Fehler vermuten. Diese unerwünschten Nebenwirkungen wie Kopfschmerz, Schwindel und Übelkeit wurden schon öfters in den einzelnen Studien beschrieben, jedoch mit uneinheitlichen Ergebnissen 30, 40, 41, 42, 43.
Insgesamt lässt sich jedoch feststellen, dass diese unerwünschten Effekte der 3-D-Technik seltener in Untersuchungen neueren Datums zu finden sind, was wohl aus der verbesserten Bildqualität resultiert 27, 30, 34, 44.
Ein Beschlagen bzw. Anlaufen der Optik, wie es bspw. durch Koagulieren oder durch das Einführen der Kameralinse von der kühleren Raumtemperatur in den wärmeren Intraperitonealraum auftritt, zeigte sich in gleichem Maße bei allen Optiken.
In der Gesamtbewertung zwischen der 2-D-Kamera (MW 2,67) und den beiden 3-D-Einheiten (System 1 MW 1,94 bzw. System 2 MW 1,89) zeigt sich mit einem p-Wert von 0,08 bzw. 0,073 kein signifikanter, jedoch ein deutlicher Unterschied.
Trotz sehr unterschiedlicher Aufbauten der 3-D-Kameras stellen diese Systeme für die Operateure und damit auch für die Patienten eine Verbesserung bzw. einen Vorteil dar.
Schlussfolgerungen
Für den Operateur
Die 3-D-Technik ermöglicht dem Operateur eine zusätzliche Darstellung der Raumtiefe und eine verbesserte plastische Erfassung der Organstrukturen. Daraus resultiert eine Erleichterung bei der Durchführung manueller Tätigkeiten. Insgesamt zeigt sich so eine weitere Annäherung der Situsdarstellung an die Bedingungen der offenen Chirurgie.
Diese realere Situsdarstellung kann zu einer Stressreduktion beim Operateur führen.
Für die Patientin
Die 3-D-Technik erleichtert die Durchführung schwierigerer Operationsschritte, wodurch die Operationsdauer verkürzt werden kann. Aus den Vorteilen der 3-D-Darstellung für den Operateur kann für die Patientin eine Zunahme der Sicherheit resultieren.
Weiterhin ist es so möglich, komplexere Eingriffe minimalinvasiv durchzuführen, was für die Patientinnen mit einer schnelleren Rekonvaleszenz im Vergleich zur offenen Chirurgie einhergeht.
Zu den Schwächen dieser Studie ist anzumerken, dass es sich bei den Ergebnissen hier um subjektive Einschätzungen von Operateuren handelt und nicht um standardisiert erhobene objektive Messungen von reproduzierbaren Tätigkeiten.
Darin besteht aber gleichzeitig auch die Stärke der Untersuchung. Es wurde überprüft, inwiefern 3-D-Technik bei einer größeren Zahl von Operationen aller Schwierigkeitsgrade Vorteile erbringt, und ob diese Technik unter Routinebedingungen alltagstauglich ist.
Insgesamt führt die 3-D-Bildgebung zu einer Verbesserung der Sichtverhältnisse, was besonders durch Tiefendarstellung des Raumes erzielt wird. Diese zusätzliche Plastizität bringt zum einen signifikante Vorteile in der Darstellung der Anatomie und hier besonders bei feinen Strukturen. Zum anderen fallen dem Operateur aber auch komplexere Operationstätigkeiten wie das Nähen durch den Einsatz der Stereoskopie deutlich leichter.
Die 3-D-Technik erwies sich in dieser Untersuchung als voll alltagstauglich und stellte eine signifikante Verbesserung der operativen Bedingungen dar, was für den Operateur eine Erleichterung der Operation bedeutet und für die Patientin einen Sicherheitsgewinn erbringt.
Footnotes
Conflict of Interest/Interessenkonflikt None./Der Autor hat keinerlei Interessenkonflikt.
References/Literatur
- 1.Dagher I, Di Giuro G, Dubrez J. Laparoscopic versus open right hepatectomy: a comparative study. Am J Surg. 2009;198:173–177. doi: 10.1016/j.amjsurg.2008.09.015. [DOI] [PubMed] [Google Scholar]
- 2.Keus F, de Jong J A, Gooszen H G. Laparoscopic versus open cholecystectomy for patients with symptomatic cholecystolithiasis. Cochrane Database Syst Rev. 2006;(04):CD006231. doi: 10.1002/14651858.CD006231. [DOI] [PubMed] [Google Scholar]
- 3.Laine S, Rantala A, Gullichsen R. Laparoscopic vs. conventional Nissen fundoplication: a prospective randomized study. Surg Endosc. 1997;11:441–444. doi: 10.1007/s004649900386. [DOI] [PubMed] [Google Scholar]
- 4.Medeiros L R, Stein A T, Fachel J. Laparoscopy versus laparotomy for benign ovarian tumor: a systematic review and meta-analysis. Int J Gynecol Cancer. 2008;18:387–399. doi: 10.1111/j.1525-1438.2007.01045.x. [DOI] [PubMed] [Google Scholar]
- 5.Sauerland S, Lefering R, Neugebauer E A. Laparoscopic versus open surgery for suspected appendicitis. Cochrane Database Syst Rev. 2004;(04):CD001546. doi: 10.1002/14651858.CD001546.pub2. [DOI] [PubMed] [Google Scholar]
- 6.Van Bergen P, Kunert W, Buess G F. The effect of high-definition imaging on surgical task efficiency in minimally invasive surgery: an experimental comparison between three-dimensional imaging and direct vision through a stereoscopic TEM rectoscope. Surg Endosc. 2000;14:71–74. doi: 10.1007/s004649900015. [DOI] [PubMed] [Google Scholar]
- 7.Wenzl R, Pateisky N, Husslein P. Erstmaliger Einsatz eines 3D-Videoendoskopes in der Gynäkologie. Geburtsh Frauenheilk. 1993;53:776–778. doi: 10.1055/s-2007-1023725. [DOI] [PubMed] [Google Scholar]
- 8.Wagner O J, Hagen M, Kurmann A. Three-dimensional vision enhances task performance independently of the surgical method. Surg Endosc. 2012;10:2961–2968. doi: 10.1007/s00464-012-2295-3. [DOI] [PubMed] [Google Scholar]
- 9.Kommu S S, Murphy D, Patel S P. Robot-assisted pyleoplasty vs. laparoscopic pyeloplasty – a preliminary cost comparison in United Kingdom setting. Proceedings of the 24th World Congress of Endourology; 2006; Cleveland, OH, USA: A224
- 10.Ahmed I, Paraskeva P. A clinical review of single-incision laparoscopic surgery. Surgeon. 2011;9:341–351. doi: 10.1016/j.surge.2011.06.003. [DOI] [PubMed] [Google Scholar]
- 11.Xin H, Zelek J, Carnahan H.eds.Laparoscopic Surgery, perceptual Limitation and Force: a Review. First canadian Student Conference on biomedical Computing; 2006. Kingston, Ontario CanadaOnline:https://www.researchgate.net/profile/John_Zelek2/publication/237774967_Laparoscopic_surgery_perceptual_limitations_and_force_A_review/links/0f31752dd5bf019665000000.pdflast access: 20.01.2014
- 12.Szeto G P, Cheng S W, Poon J T. Surgeonsʼ static posture and movement repetitions in open and laparoscopic surgery. J Surg Res. 2012;172:e19–e31. doi: 10.1016/j.jss.2011.08.004. [DOI] [PubMed] [Google Scholar]
- 13.Dakin G, Gagner M. Comparison of laparoscopic skills performance between standard instruments and two surgical robotic systems. Surg Endos. 2003;17:574–579. doi: 10.1007/s00464-002-8938-z. [DOI] [PubMed] [Google Scholar]
- 14.Bueß G F, van Bergen P, Kunert W. Vergleichsstudie verschiedener 2-D- und 3-D-Sichtsysteme in der minimal-invasiven Chirurgie. Chirurg. 1996;67:1041–1046. doi: 10.1007/s001040050101. [DOI] [PubMed] [Google Scholar]
- 15.Crosthwaite G, Chung T, Dunkley P. Comparison of direct vision and electronic two- and three dimensional display systems on surgical task efficiency in endoscopic surgery. Br J Surg. 1995;82:849–851. doi: 10.1002/bjs.1800820640. [DOI] [PubMed] [Google Scholar]
- 16.Peitgen K, Walz M V, Holtmann G. A prospective randomized experimental evaluation of three-dimensional imaging in laparoscopy. Gastrointest Endosc. 1996;44:262–267. doi: 10.1016/s0016-5107(96)70162-1. [DOI] [PubMed] [Google Scholar]
- 17.Storz P, Buess G, Kunert W. 3D HD versus 2D HD: surgical task efficiency in standardised phantom tasks. Surg Endosc. 2012;26:1454–1460. doi: 10.1007/s00464-011-2055-9. [DOI] [PubMed] [Google Scholar]
- 18.Leite M, Carvalho A F, Costa P. Assessment of laparoscopic skills performance: 2D versus 3D vision and classic instrument versus new hand-held robotic device for laparoscopy. Surg Innov. 2016;23:52–61. doi: 10.1177/1553350615585638. [DOI] [PubMed] [Google Scholar]
- 19.Aggarwal R, Grantcharov T, Moorthy K. Toward feasible, valid, and reliable video-based assessments of technical surgical skills in the operating room. Ann Surg. 2008;247:372–379. doi: 10.1097/SLA.0b013e318160b371. [DOI] [PubMed] [Google Scholar]
- 20.Hasson H M, Jason H.Information retention and skill acquisition after CME meetings Laparosc Today 200764–6.2012; 26: 2961–2968 [Google Scholar]
- 21.Kunert W, Storz P, Kirschniak A. For 3D laparoscopy: a step towards advanced surgical navigation: how to get maximum benefit from 3D vision. Surg Endosc. 2013;27:696–699. doi: 10.1007/s00464-012-2468-0. [DOI] [PubMed] [Google Scholar]
- 22.Alaraimi B, El Bakbak W, Sarker S. A randomized prospective study comparing acquisition of laparoscopic skills in three-dimensional (3D) vs. two-dimensional (2D) laparoscopy. World J Surg. 2014;38:2746–2752. doi: 10.1007/s00268-014-2674-0. [DOI] [PubMed] [Google Scholar]
- 23.Wilhelm D, Reiser S, Kohn N. Comparative evaluation of HD 2D/3D laparoscopic monitors and benchmarking to a theoretically ideal 3D pseudodisplay: even well-experienced laparoscopists perform better with 3D. Surg Endosc. 2014;28:2387–2397. doi: 10.1007/s00464-014-3487-9. [DOI] [PubMed] [Google Scholar]
- 24.Cicione A, Autorino R, Breda A. Three-dimensional vs. standard laparoscopy: comperative assessment using a validated programm for laparoscopic urologic skills. Urology. 2013;82:1444–1450. doi: 10.1016/j.urology.2013.07.047. [DOI] [PubMed] [Google Scholar]
- 25.Kneist W, Huber T, Paschold M. 3D virtual reality laparoscopic simulation in surgical education – results of a pilot study. Zentralbl Chir. 2016;141:297–301. doi: 10.1055/s-0033-1350609. [DOI] [PubMed] [Google Scholar]
- 26.LaGrange C A, Clark C J, Gerber E W. Evaluation of three-dimensional vision laparoscopic modalities: robotics versus three-dimensional vision laparoscopy versus standard laparoscopy. J Endourol. 2008;22:511–516. doi: 10.1089/end.2007.0241. [DOI] [PubMed] [Google Scholar]
- 27.Sun C C, Chiu A W, Chen K K. Assessment of a three-dimensional operating system with skill tests in a pelvic trainer. Urol Int. 2000;64:154–158. doi: 10.1159/000030517. [DOI] [PubMed] [Google Scholar]
- 28.Mueller M, Camartin C, Dreher E. Three-dimensional laparoscopy. Gadget or progress? A randomized trial on the efficacy of three-dimensional laparoscopy. Surg Endosc. 1999;13:469–472. doi: 10.1007/s004649901014. [DOI] [PubMed] [Google Scholar]
- 29.Smith R, Schwab K, Day A. Effect of passive polarizing three-dimensional displays on surgical performance for experienced laparoscopic surgeons. Br J Surg. 2014;101:1453–1459. doi: 10.1002/bjs.9601. [DOI] [PubMed] [Google Scholar]
- 30.Tanagho Y S, Andriole G L, Paradis A G. 2D versus 3D visualization: impact on laparoscopic proficiency using the fundamentals of laparoscopic surgery skill set. J Laparoendosc Adv Surg Tech A. 2012;22:865–870. doi: 10.1089/lap.2012.0220. [DOI] [PubMed] [Google Scholar]
- 31.Honeck P, Wendt-Nordahl G, Rassweiler J. Three-dimensional laparoscopic imaging improves surgical performance on standardized ex-vivo laparoscopic tasks. J Endourol. 2012;26:1085–1088. doi: 10.1089/end.2011.0670. [DOI] [PubMed] [Google Scholar]
- 32.Silvestri M, Simi M, Cavallotti C. Autostereoscopic three-dimensional viewer evaluation through comparison with conventional interfaces in laparoscopic surgery. Surg Innov. 2011;18:223–230. doi: 10.1177/1553350611411491. [DOI] [PubMed] [Google Scholar]
- 33.Feng C, Rozenblit J W, Hamilton A J. A computerized assessment to compare the impact of standard, stereoscopic, and high-definition laparoscopic monitor displays on surgical technique. Surg Endosc. 2010;24:2743–2748. doi: 10.1007/s00464-010-1038-6. [DOI] [PubMed] [Google Scholar]
- 34.Supe A N, Kulkarni G V, Supe P A. Ergonomics in laparoscopic surgery. J Minim Access Surg. 2010;6:31–36. doi: 10.4103/0972-9941.65161. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 35.Shore E M, Lefebvre G G, Husslein H. Designing a standardized laparoscopy curriculum for gynecology residents: a Delphi approach. J Grad Med Educ. 2015;7:197–202. doi: 10.4300/JGME-D-14-00548.1. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 36.van Bergen P, Kunert W, Bessell J. Comparative study of two-dimensional and three-dimensional vision systems for minimally invasive surgery. Surg Endosc. 1998;12:948–954. doi: 10.1007/s004649900754. [DOI] [PubMed] [Google Scholar]
- 37.Sahu D, Mathew M J, Reddy P K. 3D laparoscopy – help or hype; initial experience of a tertiary health centre. J Clin Diagn Res. 2014;8:NC01–NC03. doi: 10.7860/JCDR/2014/8234.4543. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 38.Falk V, Mintz D, Grünenfelder J. Influence of three-dimensional vision on surgical telemanipulator performance. Surg Endosc. 2001;15:1282–1288. doi: 10.1007/s004640080053. [DOI] [PubMed] [Google Scholar]
- 39.Kihara K, Fujii Y, Masuda H. New three-dimensional head-mounted display system, TMDU-S-3D system, for minimally invasive surgery application: procedures for gasless single-port radical nephrectomy. Int J Urol. 2012;19:886–889. doi: 10.1111/j.1442-2042.2012.03044.x. [DOI] [PubMed] [Google Scholar]
- 40.Zdichavsky M, Schmidt A, Luithle T. Three-dimensional laparoscopy and thoracoscopy in children and adults: a prospective clinical trial. Minim Invasive Ther Allied Technol. 2015;24:154–160. doi: 10.3109/13645706.2014.968171. [DOI] [PubMed] [Google Scholar]
- 41.Way L W, Stewart L, Gantert W. Causes and prevention of laparoscopic bile duct injuries: analysis of 252 cases from a human factors and cognitive psychology perspective. Ann Surg. 2003;237:460–469. doi: 10.1097/01.SLA.0000060680.92690.E9. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 42.Chan A C, Chung S C, Yim A P. Comparison of two-dimensional vs. three-dimensional camera systems in laparoscopy surgery. Surg Endosc. 1997;11:438–440. doi: 10.1007/s004649900385. [DOI] [PubMed] [Google Scholar]
- 43.Taffinder N, Smith S G, Huber J. The effect of a second-generation 3D endoscope on the laparoscopic precision of novices and experienced surgeons. Surg Endosc. 1999;13:1087–1092. doi: 10.1007/s004649901179. [DOI] [PubMed] [Google Scholar]
- 44.Hanna G B, Shimi S M, Cuschieri A. Randomised study of influence of two-dimensional versus three-dimensional imaging on performance of laparoscopic cholecystectomy. Lancet. 1998;351:248–251. doi: 10.1016/S0140-6736(97)08005-7. [DOI] [PubMed] [Google Scholar]
- 45.Votanopoulos K, Brunicardi F, Thornby J. Impact of three dimensional vision in laparoscopic training. World J Surg. 2008;32:110–118. doi: 10.1007/s00268-007-9253-6. [DOI] [PubMed] [Google Scholar]
- 46.Tevaearai H T, Mueller X M, Segesser L K. 3-D vision improves performance in a pelvic trainer. Endoscopy. 2000;32:464–468. doi: 10.1055/s-2000-643. [DOI] [PubMed] [Google Scholar]
- 47.Lusch A, Bucur P L, Menhadji A D. Evaluation of the impact of three-dimensional vision on laparoscopic performance. J Endourol. 2014;28:261–266. doi: 10.1089/end.2013.0344. [DOI] [PubMed] [Google Scholar]