

Abstract
Soft robotics and its related technologies enable robot abilities in several robotics domains including, but not exclusively related to, manipulation, manufacturing, human–robot interaction and locomotion. Although field applications have emerged for soft manipulation and human–robot interaction, mobile soft robots appear to remain in the research stage, involving the somehow conflictual goals of having a deformable body and exerting forces on the environment to achieve locomotion. This paper aims to provide a reference guide for researchers approaching mobile soft robotics, to describe the underlying principles of soft robot locomotion with its pros and cons, and to envisage applications and further developments for mobile soft robotics.
Keywords: soft robotics, robot locomotion, bioinspiration, animal locomotion, biomimetics
1. Introduction
Mobile robots have the main goal of extending the exploration capabilities of humans, by providing access to dangerous structures, extreme environments or unreachable areas. The new technologies and principles underpinning soft robotics, which aim to obtain gentle and safe interaction with the environment, adaptability and energy harvesting [1], are, therefore, appealing tools for mobile robotics researchers.
Soft robotics is a relatively young field, and is still redefining some design, control and fabrication methods [2], which may significantly diverge from traditional ones. To deal with these innovative requests, researchers in soft robotics are finding much inspiration in Nature's solutions, which have successfully evolved animals with soft bodies, compliant joints, deformable shells and other strategies which could be harvested by researchers in robotics [3]. The locomotion of animals is deeply studied and covers a wide range of different gaits, underpinned by diverse physical principles which are well known in the literature. In this paper, we will follow the classification of locomotion proposed in a seminal work [4], where fundamentals, high-abstract models and principles were proposed to describe the locomotion of common animals. Likewise, this work has the purpose of providing the reader with a reference guide to the principles behind a specific soft locomotion, thereby to approach the appropriate physical paradigm in which to design and develop mobile soft robots (figure 1). It is worth mentioning that soft robotics is a heterogeneous, multi-disciplinary field to which belong a number of actuation strategies, materials, models, compliant and deformable structures, and so on. Owing to these observations, there are several definitions of soft robotics [1]. In this work, we do not want to restrict this field to specific solutions; rather, we use the broadest definition of mobile soft robots (or soft robotics technology). In this review, we consider as part of this field each robot for which locomotion is enabled by deformable (due to inherent or structural compliance) components or which relies on such deformable components to increase quantitative or qualitative performance. This is a rephrasing of the soft robotics definition provided in [7]. As will be seen in the referenced works, within this definition we can include each robot claimed to be soft by the research community, excluding only robots where the compliance is obtained by active control [8], which are beyond the scope of this paper.
Figure 1.

Examples of soft robots designed for different locomotion modalities: peristaltic crawling (a) (adapted from [5], credits to M.P. Nemitz, Wormbot); walking (b); walking and crawling (c); jumping (d) (credits to C. Stefanini, cricket robot); morphing wing flight (e), (adapted from [6], credits to M. Di Luca, morphing wing drone); jet propulsion swimming (f); undulation swimming (g); vibration-based (h) and morphing wheels (i). (Online version in colour.)
This review paper is structured as follows. Each section, which represents a specific gait, will start with a brief description of the animals' principles of locomotion. We will then describe the soft robotic solutions which have been used to replicate these fundamental principles; we will also describe the possible advantages brought by a soft body. Finally, the section Conclusions and further perspectives describes the possible application fields of mobile soft robots, both from a robotic and a bio-robotic point of view.
2. Crawling: two-anchor, peristaltic
Crawling animals, being mostly made of compliant tissues, are perfect models for mobile soft robots. Crawling locomotion includes several different gaits, and possibly refers also to (apparently) unorganized body motions which provide locomotion, such as babies' crawling. Although there are different ways of crawling, most of them are friction-based. In this section, we report specific crawling gaits which have been identified in caterpillars, worms and leeches, and then we show how their fundamental principles also apply to multi-limb robots.
2.1. Two-anchor crawling
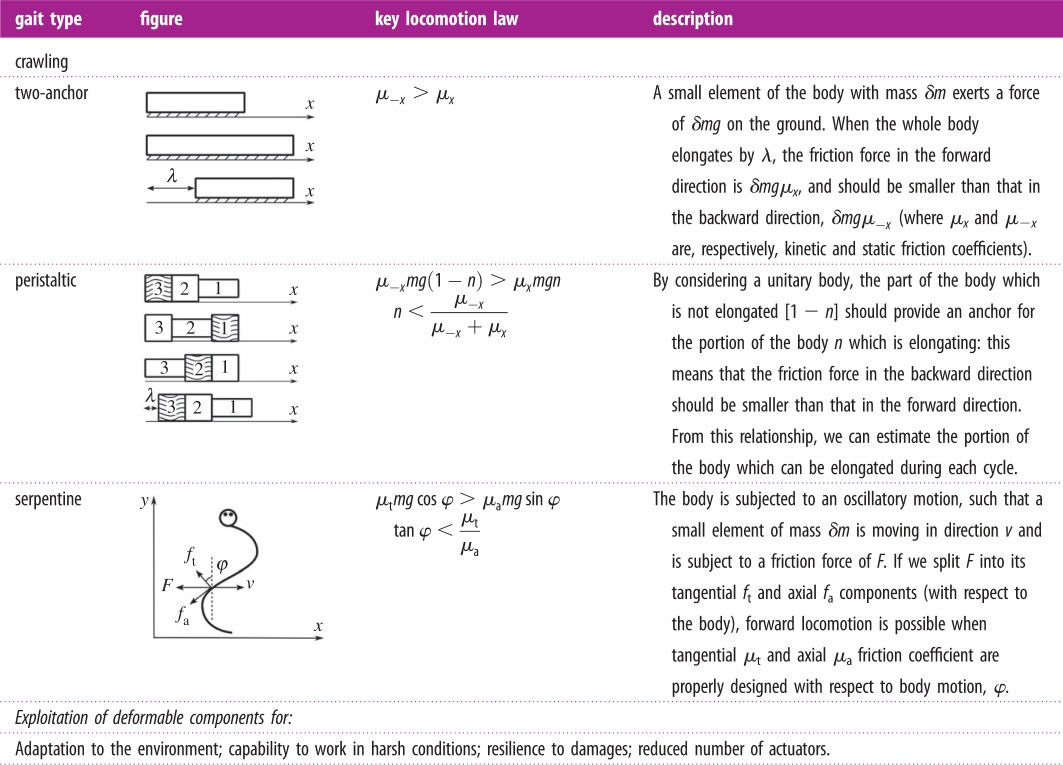
Two-anchor crawling has been extensively studied in caterpillars, but the principle underlying it applies to a large range of animals. Consider the schematic model of an animal crawling on the ground, as shown in table 1. The animal moves forward by lengthening and shortening its body. Forward locomotion is due to a friction coefficient that is lower in the forward direction than in the backward direction ( , anisotropic friction). This property is modelled with backward-oriented bristles on the ventral part of the animal, but biological solutions also include prolegs or suckers that anchor the body, setae, mucus that has anisotropic properties and many other strategies. Bristles prevent the hind and fore parts of the body from sliding backward when the animal lengthens and shortens its body, respectively. A detailed mathematical description of this gait is presented in [9].
, anisotropic friction). This property is modelled with backward-oriented bristles on the ventral part of the animal, but biological solutions also include prolegs or suckers that anchor the body, setae, mucus that has anisotropic properties and many other strategies. Bristles prevent the hind and fore parts of the body from sliding backward when the animal lengthens and shortens its body, respectively. A detailed mathematical description of this gait is presented in [9].
Table 1.
Principles of crawling locomotion. The last row highlights, in a synthetic way, how soft components are exploited in this locomotion.
 |
Robotics replicas focus on the elongating/shortening capability and on the realization of the differential friction. The pioneer of soft crawling robots was inspired by the moth Manduca sexta and used shape memory alloys (SMAs) to deform a body made of silicone [10]. Elongation and shortening is not necessarily realized in the linear implementation presented in table 1, but it can also be obtained by rising and sprawling the central parts of a body, while the distal parts provide the anisotropic friction [11]. This strategy was implemented in several robotic prototypes, where the actuations were provided by SMA tendons [12] or via electric motors and soft tendons [13] that bent a three-dimensional-printed rubber body. Another approach was followed by [14], who described a crawler with a body that was manufactured using a technique inspired by the Japanese art of origami. Actuation relied on SMA wires, and anisotropic friction was realized with two bristles at the edges of the body. Finally, a multi-segment purely elongating body (artificial annelid robot) was presented in [15], where electro-active polymer (EAP) membranes pushed the segments of the annelid robot, while stiff feathers resembling setal hairs provided the anisotropic friction. Other simple ways to implement the required friction include the employment of slippery pads at the edges of the body to reduce friction with the ground when the body is tilted over a threshold angle [13], bristles at the distal parts of the body [14] or the usage of controlled adhesion pads [11].
Two-anchor crawling is also used by some limbed animals, which actually have robotic replicas, including a pneumatic actuated tetrapod crawler [16], an octopus-inspired, cable-driven robot [17,18] and a five-limbed starfish-like robot actuated by SMA [19]. It is worth mentioning that this limbed-crawling category is made up of multi-gait robots, which can usually also walk [16,20]. Although this strategy could also be implemented in rigid robots, a soft body brings qualitative advantages related to conformability to unstructured environments and the possibility of obtaining delicate contacts. These advantages are shared by peristaltic robots, and will be reported in more detail in the next section.
2.2. Crawling by peristalsis
Peristaltic locomotion is employed by many worms, and the typical example is the common earthworm. Worms can be made of a single or multiple muscular hydrostat, which couples radial contraction of the body with axial elongation [21]. With respect to two-anchor crawling, the body of the animal does not contract as a whole; rather, a wave of radial contraction (and axial elongation) travels backward along the body, pushing the animal forward. The body segments of an earthworm lengthen and shorten in turn (table 1). Friction limits the portion of the body that can be moved to allow locomotion. If we consider a fraction n of a unitary body elongating at a certain time, the maximum part which can be elongated is  , depending on the friction coefficients of the anchoring (
, depending on the friction coefficients of the anchoring ( ) and the moving segments (μx). This highlights another difference from two-anchor crawling: anisotropic friction is not strictly required for peristaltic crawling. When forward and backward friction coefficients are the same, less than half of the body should be contracted simultaneously to perform locomotion.
) and the moving segments (μx). This highlights another difference from two-anchor crawling: anisotropic friction is not strictly required for peristaltic crawling. When forward and backward friction coefficients are the same, less than half of the body should be contracted simultaneously to perform locomotion.
The concurrent action of contraction/elongation is elegantly reproduced by rhomboidal braided structures in [22–24]. Softworm is made of a flexible mesh wrapped with tendons that are actuated by an electric motor [22]. An accurate mathematical model for Softworm is presented in [25], along with three different control strategies to minimize friction and enhance speed. The Meshworm robot category [23] includes models that are actuated by NiTi coils of SMA wrapped in a spiral pattern and arranged longitudinally for steering.
An alternative solution for providing peristalsis was proposed in [26], where a silicone four-segment robot was actuated by SMA springs. Subsequent activation of SMA springs caused the robot to contract in the longitudinal direction, whereas antagonistic behaviour in the radial direction was obtained with the passive compliant structure of the silicone shells (of quasi-spherical shape). A recent approach with silicone body segments was proposed by Wormbot [5], where voice coils were used for actuation, communication and sensing. Finally, a closer focus on endoscopy application is found in [27], where pneumatic actuation was employed. The authors presented a robot made of three pneumatic artificial muscles in series. Each muscle was made of an inflatable bladder inside a tubular mesh of inelastic material.
Arguably, there are several extremely heterogeneous crawling soft robots. Some of them have been purposely implemented to mimic animals and gain insights into biological principles, whereas others have exploited soft body features to enhance (or enable) locomotion. A key motivation for crawling soft robots is their intrinsic capability to adapt to the environment. A soft body is considered helpful in a confined space, among debris [11,12], inside the human body [27] and generally in any situation where robots should adapt gently to the environment. This is effectively achieved by crawling robots, which are among the few mobile robots which can be entirely built of soft components [13,16,24,28]. Moreover, a soft body is a perfect means by which to implement continuous motion without multi-component mechanisms; peristaltic waves, bending limbs and elongations could be easily implemented with simple actuation, exploiting elastic properties of the body. Finally, crawling soft robots show potential to work in harsh conditions, being resilient to impacts [24] and severe compressions [29].
2.3. Serpentine crawling
The continuously deformable body of a snake is crossed by a wave of deformation, and forward locomotion is achieved depending on the friction coefficients in play. Consider the schematic of a snake crawling shown in table 1. The snake's body is represented as a perfect sinusoid. The snake advances only if the forward component of transverse frictional force Ft is greater than the backward component of axial frictional force Fa, which yields a relationship between the curvature of the snake and the friction coefficients  .
.
Although snake-inspired soft robots could be envisioned, serpentine crawling robots have been mostly implemented by means of hyper-redundant chains of rigid links. To the best of the authors' knowledge, Onal & Rus [30], Luo et al. [31] and Yuk et al. [32] report the only examples of serpentine crawling robots made of soft material. In [30,31], a snake-inspired robot made of four fluidic elastomeric actuators in series was presented, in which anisotropic friction (tangential and axial) was obtained by means of passive wheels. Finally, in [32] an SMA-actuated robot was described, inspired by the serpentine crawling of the Caenorhabditis elegans worm. This robot was made of 12 body segments, each actuated with two dual SMA spring units. Anisotropic friction was realized with a silicone cover on the robot and the channel's walls.
3. Legged locomotion: hopping, running and walking
Legs enable dexterous locomotion and there is a vast amount of studies concerning legged robotics, such that a complete survey is out of the scope of this paper. In this section, we will highlight soft features relevant for legged locomotion, and we refer interested readers to other aspects of specific works.
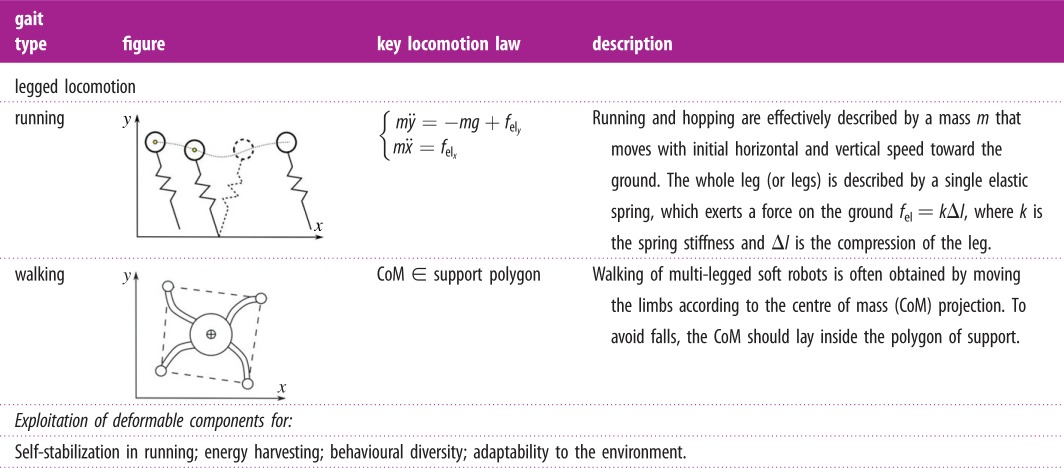
The fundamental model for dynamic legged locomotion is the spring-loaded inverted pendulum (SLIP) [33], where the compliance of the whole leg (including tendons, muscles, joints, etc.) is synthesized by an elastic element, while the whole body is represented by a point mass (table 2). This simple model effectively describes the locomotion of a great variety of different animals (including humans) that use running and hopping gaits [34], and has been successfully translated into several robotic prototypes. Straightforward replicas of compressible legs have employed pneumatic elements [35] or elastic springs [36,37], whereas more elaborate designs have used flexible structural elements [38,39], a C-shaped foot [40,41], bow-like legs [42] or springs that mimic muscle–tendon systems [43]. Similar to multi-legged animals [34], multi-legged robots could base their locomotion on the SLIP model by considering the equivalent contribution of parallel springs [44], so that the system is considered to have a single virtual leg.
Table 2.
Principles of running and walking. The last row highlights, in a synthetic way, how soft components are exploited in this locomotion.
 |
Although the above examples have softness only in specific parts, they rely on those components to improve their performance. It is worth mentioning three key aspects that highlight the role of compliant components. First, compliance in legs reduces the external disturbances without the need for feedback control [45,46], a concept that is considered essential for complex dexterous locomotion, and a sought-after capability in mobile robots [47]. Second, energy harvesting could be obtained by exploiting compliant elements of the system [48,49] or by properly matching actuation, leg and body compliance [50]. Third, the role of a compliant body in legged locomotion has been further explored in behavioural diversity [51,52] with minimum control.
Finally, when we are referring to slower gaits (such as walking), the SLIP model still provides an accurate description for the bipedal walking of humans [53]; however, this model has only a few robotic counterparts [54–56]. Most soft multi-legged robots employ a different principle for walking: they move legs and body to keep the centre of gravity always inside the polygon of support (table 2). This was the first strategy used by rigid legged robots [57], and it is a concept often used by robots with soft pneumatic legs [16,58,59], SMA and spring systems [60], and EAPs [61]. In those gaits, soft bodies or structures are exploited to adapt to different conditions, move inside confined spaces, or reduce the force exerted on the environment.
4. Jumping gait
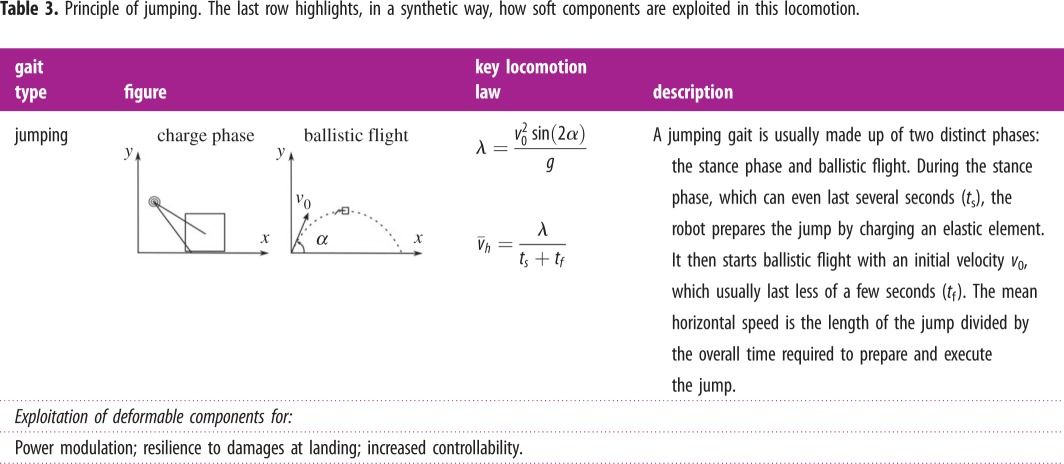
Jumping is a very effective locomotion modality used by numerous animals, ranging from frogs to grasshoppers to small mammals [4]. In this gait, the body starts from a resting position (with zero speed) while elastic elements accumulate potential energy (within muscles or connective tissues) to initiate a quasi-ballistic throw toward the next position. The body then stops in the novel position, and energy is accumulated again for the next jump (table 3).
Table 3.
Principle of jumping. The last row highlights, in a synthetic way, how soft components are exploited in this locomotion.
 |
Although some jumping robots are built completely with hard materials [62], most of them employ elastic elements to store energy and mechanisms to provide mechanical advantages during the energy accumulation phase [63]. Energy storage could be coupled with joint positions of the leg, in the so-called parallel-elastic configuration. Robots of this category have reached impressive jumping performance. A locust-inspired, cable-driven robot with torsional springs has jumped the highest distance (approx. 3 m) to date [64], but four-bar linkage robots with linear springs closely follow [65,66]. Those robots also express multimodal locomotion, coupling jumping and gliding in one case [65], and jumping and crawling in the other [66]. Multimodal locomotion is an emerging field, and interested readers may refer to Low et al. [67]. Another category encompasses serial-elastic configurations. In these designs, leg position and energy storage is decoupled, allowing power modulation via mechanical design of the leg mechanisms. Crossed four-bar linkages [68], six- and eight-bar mechanisms [63] and C-leg structures [69] are all examples of serial-elastic configurations. These robots have shown lower vertical jumping performance, yet they have greater jumping agility than their parallel-elastic counterparts [70].
Recently, additive manufacturing has allowed the exploitation of local deformation of soft robots in order to optimize certain characteristics of manipulating or moving robots. Specifically in [71], the distribution of nine levels of different stiffness was studied to optimize the performance of a jumping soft robot powered by combustion. Simulations and experimental results demonstrated that a rigid body enabled longer jumps than its soft counterpart; however, the landing provoked significant damages to the robot structure. Conversely, despite reducing the performance of the locomotion, a body built with a gradient of stiffness was a suitable trade-off to significantly reduce the damage upon impact, yet allow the performance of long jumps. Outer compliant structures can also be exploited to control jumping direction, a problem which is otherwise difficult to solve. The compliant cage presented in [72] was used to protect the leg mechanism and direct the robot, by which a sequence of consecutive jumps was achieved. Finally, fully compliant jumping robots can be designed by exploiting a deformable outer shell and SMA, as illustrated in [73].
Compliant elements play a significant role both in jumping animals [74] and in robots. In animals, the manner in which the legs' bio-mechanics exceed the maximum power output allowed by the muscle alone has been demonstrated [75]. Similarly, one key advantage of jumping soft robots can be identified in the proper exploitation of power modulation. Jumping mechanisms can be designed to release the energy stored during the slow charging phase in a short period, resulting in a certain mechanical advantage [63]. Serial configurations exploit this power-modulating behaviour and allow decoupling of the orientation of the leg from energy storage, resulting in an optimal usage of energy and increased agility [70]. The second core feature of jumping soft robots is the reduced amount of damage sustained in the landing phase. Flexible structures and deformable shells have been used to pursue this goal [3,72], but the whole body could also be made of soft materials to significantly reduce the impact forces at touch-down [71].
5. Flying gaits
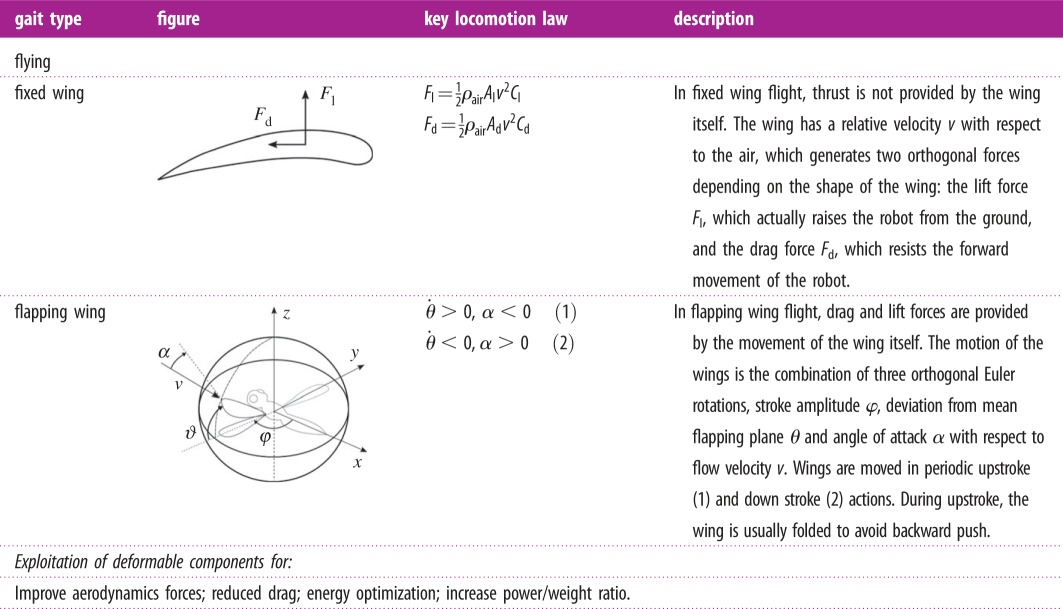
Animals employ wings in two main different flying gaits: gliding, where the wing is kept almost fixed and exploits airflows for movement, and flapping, where flight is powered by continuously moving the wing in periodic movements. By taking an aerofoil (or a wing) with velocity v relative to air as a reference (table 4), according to Bernoulli's principle the difference in the velocities of air particles on the upper and lower sides of the aerofoil induces a difference in pressure, which ultimately causes the generation of a lift force in the form  , where Al is the wing area and Cl is the lift coefficient that synthesizes the effect of many factors, including the wing shape and angle of attack. At the same time, air will exert drag on the aerofoil in the form
, where Al is the wing area and Cl is the lift coefficient that synthesizes the effect of many factors, including the wing shape and angle of attack. At the same time, air will exert drag on the aerofoil in the form  , where Cd is the drag coefficient. Animals, as well as soft robots, harness these forces to perform flights.
, where Cd is the drag coefficient. Animals, as well as soft robots, harness these forces to perform flights.
Table 4.
Principles of flying locomotion. The last row highlights, in a synthetic way, how soft components are exploited in this locomotion.
 |
From the beginning of aviation, the Wright brothers realized some of the potential benefits of having deformable wings; yet from the 1930s onwards, stiff wing structures were preferred because they could withstand larger forces, and allowed greater payloads and speeds. In the last 30 years, the advent of new actuation technologies, such as SMA and piezoelectric actuators, flexible lightweight materials and powerful computational tools, has renewed the interest in wings that can adapt their shape to flying conditions, so-called morphing wings, and many works and prototypes are now available in the literature.
5.1. Fixed wing (gliding)
In fixed wing flight, thrust and lift are generated independently. Regardless of the source, thrust must balance drag in the horizontal direction to achieve forward locomotion. In the vertical direction, lift must balance weight to remain airborne. The wing design critically affects the generation of aerodynamic forces acting directly on parameters Ad, Al, Cd and Cl. The concept of a shape morphing wing has been extensively researched in the field of fixed (rigid) wing aircraft and unmanned aerial vehicles (UAVs), but very few prototypes have been fabricated or flight tested [76]. For example, in [77] telescopic wings that can extend their span length with pneumatic actuation were presented. More recently, in [78] a multimodal UAV that can fly and start a diving manoeuvre by folding its wings like those of a seabird was described.
Soft technology can be applied in the implementation of morphing wings, both on the surface or in the structure of the wing. In [79], by means of a vacuum pump and flexible skin, it was shown that it is possible to expand the vehicle flight envelope without gaps and discontinuities in the wing profile that would increase the drag, whereas in [80,81] a wing with a honeycomb-like structure was actuated by using SMA tubes and wires to adapt to different mission conditions.
Many ideas that led to the development of morphing wings in aircrafts have been inspired by birds; however, there exist examples of flying robots for which biological inspiration is more explicit. Membrane wings can be regarded as a special case of morphing wings that are made of a flexible skeleton and a thin membrane that accommodates its shape to the aerodynamic flow, with the further benefit of being extremely lightweight and thus requiring limited energy for actuation. In [82], the authors took inspiration from bat wings to investigate the generation of aerodynamic forces with different wing aspect ratios, and with low Reynold's numbers and ground effect regimes [83]. The authors suggested that an increase in lift generation and smooth gust rejection can be achieved thanks to the oscillations of the membrane that energize the boundary layers, allowing a longer flow attachment. Finally, in [6] another type of morphing wing featuring feathers attached to the leading edge was designed and integrated on a drone.
5.2. Flapping wing (powered forward flight and hovering)
In flapping wing flight, lift and thrust are generated at once by moving air backward and downward in the flapping motion (table 4). Birds and insects harness this principle very efficiently by continuously changing the angle of attack and wing profile during flapping. Considering lift forces, this complex wing motion has the effect of changing the values of Al and Cl over a flapping cycle to regulate and optimize the generation of aerodynamic forces. The body tends to be aligned with the airflow to reduce drag and to generate some extra lift by harnessing forward velocity.
Much of what has been said concerning morphing wings is still valid in flapping wing flight, but more benefits can be achieved by exploiting elastic and deformation properties of specific components when a flapping motion is in place. Flapping wings continuously accelerate and decelerate, and much energy can be saved with an elastic driving mechanism. In [84], inspired by the elastic behaviour of insects' thoraces, a crank slider featuring two tensional springs to drive the flapping was studied. Simulations showed improved driving efficiency thanks to continuous storing and releasing of energy in the springs. The generation of aerodynamic forces could be further improved with an adequate deformation of the wing over the flapping cycle. This can be passively obtained with a specific stiffness profile. In [85], the benefits of a flexible wing in comparison to a rigid one were experimentally demonstrated using a robotic platform to reproduce the flapping motion, and measuring lift and drag forces, and position of the centre of pressure for a set of different wings. More recently, in [86] a technique to fabricate membrane wings with micro-wrinkles was presented. A very fine modulation of the stiffness profile of the wing could be easily detected by acting on the configuration of the wrinkles. Experimental comparison of flat and wrinkled wings showed that it is possible to generate more than double the lift when the micro-wrinkles are oriented chordwise. Efficient generation of aerodynamic forces has also been obtained by reducing, as observed in birds, the amount of negative lift produced during the upstroke by folding the wing. In [87], a wing design based on a compliant carbon-fibre rod was proposed to passively switch from a compliant behaviour in the upstroke to a stiff behaviour in the downstroke. Moreover, the distributed bending of this wing design helped to relieve the torque load on the motor. Membrane wings have also been implemented on flapping wing robots, such as RoboRaven [88], where biaxially oriented polyethylene terephthalate (Mylar) wings were designed to passively deform in the presence of load to optimize the generation of aerodynamic forces. Similarly, in [89] a bat-inspired flying robot was designed in order to achieve the great agility of its biological counterpart and to verify a biological hypothesis concerning how these animals fly. In particular, the design of the wings exploited synergies observed in the wing motion to reproduce the natural movements of wings without mimicking their complex structure.
Hummingbirds and many insects are capable of staying airborne at zero forward velocity. This flying gait is called hovering, and is performed by flapping wings at a higher rate compared to animals and robots described in the previous paragraph. The principle is the same as that behind flapping wings, but the angles of attack of the wings are set to favour the generation of lift over thrust. Hovering animals and robots cannot rely on lift generated from forward velocity and thus, robotic implementations must meet very strict weight constraints to achieve flight. Hovering robots can benefit from flexible materials and smart actuation to achieve high efficiency in lift generation without a substantial increase in weight. In [90], very small and light robots with masses of 80 mg each, inspired by dipteral flies, were presented. They were actuated with a high power density piezoelectric muscle and equipped with passive compliant flexures to regulate the pitching motion of wings during flapping without the need for more actuators. A similar strategy was adopted in [91], where the wings of a dragonfly-inspired robot were designed to provide a torsional motion in response to the flapping driven by a piezoelectric actuator. This concept was further investigated by comparing rigid and flexible wings with the latter, achieving optimal lift production [92].
6. Swimming gaits
Recently, the field of underwater robotics has grown considerably due to the increasing demand for machines capable of replacing human operators in a wide range of risky and complex applications. Driven by the impressive capabilities of underwater animals, some researchers have taken inspiration from nature to develop robots with performance and efficiency comparable to their biological counterparts.
Locomotion in water shares some similarities with flight, specifically in the generation of hydrodynamic forces. The category of lift-induced swimming resembles flapping wing flying; however, the differences between water and air have allowed the development of locomotion strategies based on other physical principles, such as drag-powered swimming and swimming by jet propulsion.
Hereafter, we will present four separate swimming gaits, but it is worth mentioning that they are often used in combination and that a conclusive disambiguation is only possible via hydrodynamic analysis.
6.1. Lift-powered swimming
A wide range of animals propel themselves in water thanks to the hydrodynamic lift generated by their fins or limbs, harnessing the same principle described for flapping wing flying. A hydrofoil moving in water at velocity v is subject to a hydrodynamic lift orthogonal to the streamflow, in the form of  , where A and C describe the geometry and orientation of the hydrofoil and ρwater is the density of water (table 5). By taking as a reference tables 4 and 5, we can highlight the differences between the definitions of lift for flight and swimming. In flight, we referred to lift as the vertical component of aerodynamic forces generated on the foil, whereas in swimming we refer to lift as the resultant hydrodynamic force, thus generating forward thrust. Depending on the animal, hydrofoils can take very different forms, such as vertically oriented caudal fins (tuna), horizontally oriented caudal fins (cetaceans), extended pectoral fins (manta rays), flippers (turtles) and differences in the motion of the hydrofoils occur accordingly.
, where A and C describe the geometry and orientation of the hydrofoil and ρwater is the density of water (table 5). By taking as a reference tables 4 and 5, we can highlight the differences between the definitions of lift for flight and swimming. In flight, we referred to lift as the vertical component of aerodynamic forces generated on the foil, whereas in swimming we refer to lift as the resultant hydrodynamic force, thus generating forward thrust. Depending on the animal, hydrofoils can take very different forms, such as vertically oriented caudal fins (tuna), horizontally oriented caudal fins (cetaceans), extended pectoral fins (manta rays), flippers (turtles) and differences in the motion of the hydrofoils occur accordingly.
Table 5.
Principles of swimming locomotion. The last row highlights, in a synthetic way, how soft components are exploited in this locomotion.
 |
Motivated by the swimming performance of the mentioned animals, many researchers have attempted to mimic their locomotion strategy and muscular structures. Three manta-inspired robots, respectively, employing pneumatic, SMA wires and ionic polymer metal composite (IPMC) actuators can be found in [93–95]. The best performance in terms of velocity, however, was achieved by the manta-robot in [96], which used DC servomotors along with flexible silicone fins designed to optimize the generation of hydrodynamic forces. Regardless of the kind of actuation, improved efficiency in the generation of hydrodynamic forces has been obtained by placing the actuators in the fore part of flexible silicone hydrofoils to allow a passive deformation of the hind part. In [97,98], two turtle-like robots featuring smart soft composite (SSC) flippers that twist and bend were presented. These solutions allowed the generation of a forward component of lift throughout the whole beating cycle, with the further benefit of limiting the overall weight of the robot.
6.2. Swimming by undulation
In lift-induced swimming, fishes propel themselves by swinging their tail and keeping their body in a relatively fixed attitude. Closer observation has found waves of bending travelling across the fore part of their bodies, but with a much smaller amplitude with respect to their tails and thus the approximation is accepted [4]. There exist animals for which this approximation does not hold, however, since the bending waves involve the whole body (table 5). These animals are said to swim by undulation. The velocity of bending waves must be greater than the velocity of the animal to set water in transverse motion relative to the body.
Similar to the serpentine crawling category, to the authors' knowledge, most undulating robots are made of hyper-redundant chains of rigid links, despite a simulation study envisaging that a single actuator could be used in combination with the elastic properties of the body [99]. Robots with a long streamlined body inspired by eels [100] or lampreys [101,102] can be very useful for exploring narrow environments without the obstacle of limbs. They can swim efficiently thanks to their flexible bodies actuated by SMA wires, which have high power/weight ratios and allow energy storage when negative work is performed during undulation [103]. The principle of swimming by undulation was also implemented in a tiny tadpole-like robot [104] for in-body exploration. Soft actuators such as IPMC allowed the miniaturisation of the robot and a safe interaction with human body. Finally, a manta-robot was developed in [105], with the aim of exploring the possibilities of EAP actuators. In contrast with the lift-induced manta robots, the undulation of mantas' fins was reproduced via distributed actuation, i.e. eight EAP artificial muscles per fin, controlled to achieve an undulating motion.
6.3. Drag-powered swimming
Propulsion in water can also be achieved by harnessing water drag. Animals such as fish, frogs and even some insects use their fins or limbs as oars, pushing water backwards and gaining thrust from the drag exerted in the opposite direction which, to achieve forward locomotion, should exceed drag acting on the body of the animal. Animals swimming by drag may seem to have similar styles to animals that gain thrust from hydrodynamic lift, but there are clues that can help in the disambiguation. All drag-powered swimmers move their oars back and forth with respect to water because they actively push it backwards and do not simply deflect it. For the same reason, their oars tend to be at right angles to the streamflow [4].
This way of swimming is specifically (but not exclusively) employed by animals in manoeuvres, fast starts and stops, and hovering; hence, many robots that require a small turning radius or possess agility requirements successfully employ this principle. At a centimetre scale, these features were implemented on fish-like robots propelling themselves with a caudal fin made of ionic conducting polymer film (ICPF) or SMA for medical applications [106,107] and IPMC with polyvinyl chloride films [108]. A bigger fish-inspired robot was presented in [109], along with studies on the fin design to optimize thrust generation. Recently, two robots inspired by the whirligig beetle were presented in [110,111]. This insect uses its appendages as oars, very similarly to a rowing boat. Both works focused on the maximization of thrust during the power stroke and minimization of drag during the recovery stroke. In [110], the multi-segmented leg of the beetle was simplified to a silicone rubber compliant leg actuated from the proximal part and left free to deform to generate maximum thrust. The design was based on an optimization problem and the use of only one actuator combined with the compliancy of the oars brought the further benefit of a simplified control, whereas in [111] a similar approach was followed to optimize the deflection of six identical polydimethylsiloxane swimming appendages with nylon rods embedded in the mould.
Moreover, softness enabled the implementation of two multi-gait robots capable of generating high acceleration with rapid escape manoeuvres. The elastic bodies of two robotic fish in [112,113] were bent in a C-shape to accumulate potential energy that was then suddenly released, resulting in a body swing that propelled the robots forward. In [113], the C-shape bending was achieved using a body made entirely of fluidic elastomer actuators (FEAs), whereas in [112] the rubber body of the fish, supported by a spring steel backbone, was kept in the initial shape with a fishing line that was then cut by a pneumatic cutting mechanism. Finally, in [114] an octopus-inspired robot used eight silicone arms to perform sculling (oar-like) and undulation locomotion.
In this category of swimmers, the use of soft, deformable materials enables medical applications by allowing a safer interaction with humans' inner body parts [106,107]. Flexible swimming appendages can be exploited to harvest energy by continuously storing and releasing energy in the elastic oars and inducing changes in the surface area of the oars to increase thrust in the power stroke and reduce drag in the recovery stroke [110,114]. Finally, an elastic deformable body allows the storage and sudden release of energy, enabling fast starting that resembles the escape manoeuvres of some fish [112,113].
Common benefits of a soft implementation can be highlighted for the previously mentioned swimming gaits. The use of flexible materials and smart actuators allows the reduction of hydrodynamic drag thanks to the smooth, continuous, wrinkle-free bodies of the robots [115]. Moreover, the use of smart actuators characterized by a high power/weight ratio is crucial for obtaining neutral buoyancy and good propulsion efficiency, and dramatically reducing the level of noise introduced by the robots underwater [106,108].
6.4. Swimming by jet propulsion
Jet propulsion is a swimming gait employed by several soft-bodied animals. This mode of locomotion is implemented, with small differences, by scallops, octopi, cuttlefishes, nautiluses, jellyfishes, squids, salps and others; however, the fundamental mechanism is based on the sequential ingestion and expulsion of a finite mass of water. The underlying physical principle is the conservation of linear momentum (table 5) of the inward and outward mass of water. The variation in the linear momentum over time, inward and outward, propels the body forward with a certain thrust [4].
This gait shows advantages (especially in acceleration and manoeuvrability) that have motivated its implementation on several rigid body vehicles [116,117], and the study for soft-bodied solutions [118]. Surprisingly, despite the widespread occurrence of this gait among numerous soft animals, only a few soft robotics counterparts have so far been developed. To the authors' knowledge, the first example of a jet propulsion soft robot was the jellyfish-inspired robot presented in [119]. The design of this robot was a faithful reproduction of its biological counterpart. The robot was made of an umbrella-like silicone body actuated by SMAs to enforce the inflation/ejection routine. This pioneering robot was followed by several alternative implementations employing a multi-wall carbon nanotube as a power supply [120], ionic polymer metal composites as actuators [121], iris mechanisms actuated by DC motors [122] and a dielectric elastomer actuator [123] as a shape-changing mechanism.
The other category of soft-bodied jet propulsion robots draws inspiration from cephalopods. The torpedo-like mantle of the Octopus vulgaris was accurately replicated in [124] by means of a silicone shell, and actuated by a DC motor and cables. Actuation routines, design and control were further investigated to increase the performance of the robot [125–127]. Squid jet propulsion inspired the development of a silicone chamber compressed by SMAs [128], whereas multi-nozzle three-dimensional-printed propellers were developed in [129].
Additional key advantages of soft-bodied devices over their rigid counterparts are especially evident in cephalopod-inspired shape-changing designs. The shrinkage of a body during the expulsion stage of the pulsed-jetting routine has been found to participate in the generation of thrust via the recovery of the fluid kinetic energy associated with the variation of added mass [130]. This phenomenon has been corroborated by the observation that periodic pulsation within the resonant window of the system allows for sustained oscillations, which in turn cancel the dumping effect of viscous drag [131], together with the benefit of the reduction of frontal area and its implication on friction drag reduction. These assets are tightly coupled to the structurally compliant nature of the propelling body, which is one of the core capabilities of soft robots [1]. Experimental evidence of the role of added mass variation in the production of thrust [125] has confirmed that active control of aquatic deformable bodies may pave the way to the design of new kinds of underwater soft robots.
A final consideration is related to the peculiar rear inlet–rear outlet design. The efficiency of swimming is higher for the frontal inlet–rear outlet configuration (which is typical of salps), since no thrust opposite to the direction of motion is produced [4]. To the authors' knowledge, no soft robots have implemented this latter configuration to date.
7. Alternative modes of locomotion
Although the vast majority of mobile soft robots are to some extent inspired by animals, a small subset has no evident biological counterparts. Excluding unique kinds of locomotion, we report here two successful (based on performance and popularity) locomotion principles: deformation-induced locomotion and vibration-based locomotion. Eventually, we show some examples of soft-wheeled robots that employ origami or pneumatic systems to deform part of their body, but are based on traditional mobile locomotion principles.
The first category of deformation-induced locomotion is clearly represented by tensegrity robots. These machines are made of rigid rods suspended (or embedded) by compliant cables (e.g. nylon-covered rubber elastic cable) and actuated by servomotors [132] or linear actuators [133]. By morphing the body, the centre of mass (CoM) of the system is moved outside the polygon of support. This induces tilting of the robot, with a consequent advancement in space (table 6). Further deformations move the CoM to the next position, allowing the robot to move in different directions. To explore the interaction between tensegrity robots and the environment, software design platforms were presented in [134] with the aim of exploiting these robots' abilities. Similarly, the jamming behaviour of a skin stuffed with granular material has been exploited to deform a soft ball-like robot and achieve omnidirectional locomotion [135].
Table 6.
Examples of locomotion modalities that do not have a biological counterpart. The last row highlights, in a synthetic way, how soft components are exploited in this locomotion.
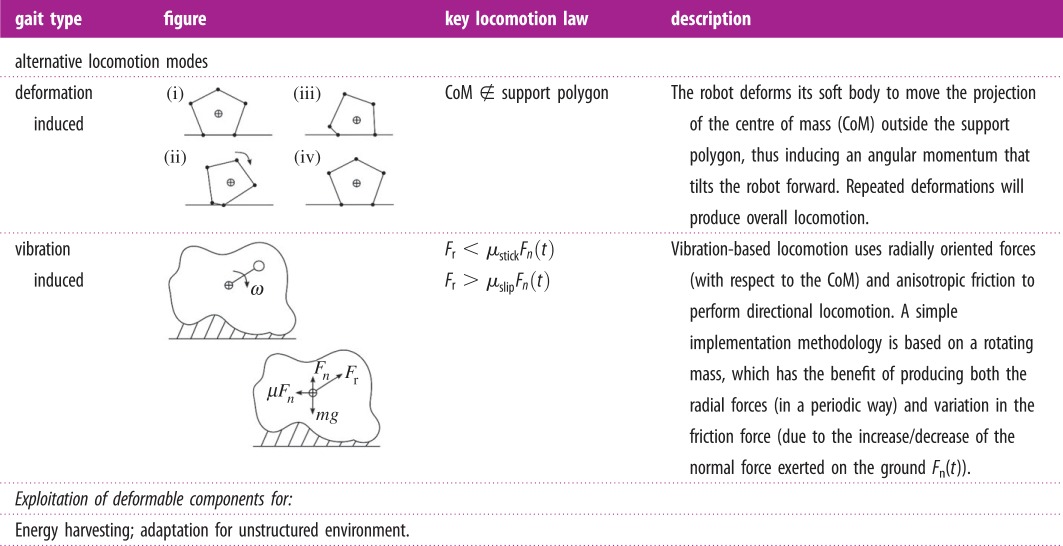 |
The second category encompasses vibrating robots that move thanks to a combination of changing force direction and anisotropic friction (table 6). Basically, the vibration induces random motions of the body, which then selects a preferred direction based on the anisotropic friction. This locomotion was well described by a slip-stick model [136]: in this representation, the friction force was reduced due to the rotation of the mass, which pushed toward (or off) the ground during half-rotation. Within this category, we can find beam-like robots that exploit resonance frequency to save energy [137], adaptable balloon robots that can vary their vibration frequency and their shape to adapt to different substrates [138], worm-like robots capable of vibration-based locomotion or two-anchor crawling [139,140] and a multi-gait robot that is also capable of jumping [141].
Finally, several kinds of soft wheels have been developed for robot locomotion. The fundamental locomotion principle is identical to wheeled mobile robots, with the peculiar features that wheels can vary in size, stiffness or shape [142].
8. Conclusion and further perspectives
Locomotion requires appropriate interactions between a body and the environment. Traditionally manufactured robots use rigid links and accurate control of joints to reach a desired configuration; historically, mobile robots also used rigid components and accurate control to exert reaction forces that, eventually, moved the CoM of the robot. Soft robotics is challenging this traditional approach, which assumes non-deformable bodies, and is coherently redefining some of the principles which underpin robot locomotion.
This paper reports some of the locomotion mechanisms employed by soft robots that are mostly inspired by (or directly copied from) biology. Nature has evolved a heterogeneous reservoir of compliant mechanisms that enable (or enhance) some aspects of locomotion. Although examples of completely soft animals exist, and they have also been accurately mimicked by roboticists, the vast majority of robots take inspiration from certain aspects of biology, while avoiding undesired or overly complex ones. The level of abstraction can vary significantly, from conceptual inspiration [3,16,38,90] to more faithful reproductions of the biological counterpart [43,124,143], but all robots exploit their compliant components to obtain quantitative (or qualitative) advantages.
By comparing the different locomotion modalities, we can highlight the recurrent benefit of energy management. This advantage is shared among all kinds of locomotion, either in the form of energy accumulation [84,103], energy release with different timings [63], exploitation of resonant components [50,137] or recovery of fluidic energy [130]. Another quantitative advantage is found when forces that provide (or go against) locomotion are shape-dependent. In flying or swimming gaits, where lift and drag forces directly depend on the shape of the vehicle or of the thrusters (either fins, wings or chambers), a morphing body could increase performance [88], decrease energy consumption [131], serve as a computational resource [144] and avoid flow disturbances [79].
Conversely, a deformable body is an enabling technology for the locomotion of crawling [11], vibrating [138] and tensegrity robots [133]. In these cases, there are qualitative advantages related to reduction of damage [29], deformability to access congested environments [145], and intrinsically safe interaction with the environment [27].
The speed of soft robots, expressed in body length per second, varies significantly, according to the gait that is employed (figure 2). Even though the robots shown were not purposely designed to optimize this feature, they appear clustered by mean speed. Friction-based gaits (i.e. crawling and vibration) are among the slowest forms of locomotion employed, whereas running, jumping and flying are among the fastest. Walking and swimming are intermediate between these border categories.
Figure 2.

Mean (highlighted in the figure), minimum and maximum speeds, expressed as body length per second (BL s−1), of the types of soft robots presented in this paper. The speed of jumping robots is computed as the maximum achievable range (i.e. resulting from 45° jumps) divided by the sum of jumping and charging times.
Although this paper reviews principles of locomotion of soft robots, some of these principles are shared with traditional mobile robots. Moreover, the boundary between traditional robotics and soft robotics is narrowing, since most traditional robots have started to employ soft robotics technologies. Conversely, when mock-up realistic scenarios are proposed, the most effective mobile soft robots still often rely on traditional locomotion modalities [146], such as deformable wheels. As a matter of fact, no mobile soft robots have yet competed in traditional robotics competitions, such as RoboCup Search and Rescue [147], the DARPA Robotic challenge [148] or euRathlon [149]. This could highlight a significant discrepancy between the benefits of soft robotics technologies and the reliability required in actual competition scenarios. The field is growing at an exceedingly fast pace, however, with an interest in the scientific community that could eventually lead to a new generation of mobile robots.
Soft robotics is paving the way toward novel robot–environment relationships, where the results of an action are dynamic among the control, the body and the environment. With this paper, we have reported the more recent or remarkable results obtained, and we have attempted to unveil, in a synthetic yet useful way, the principles of locomotion of such robots. By keeping in mind these fundamentals of locomotion and the advantages that can be obtained by employing soft technologies, researchers in mobile robotics could design improved machines that will push the exploration capability of current robots forward.
Authors' contributions
M.C. and C.L. conceived the first version of the work, and defined the article's structure. G.P. analysed and wrote draft versions of crawling, flying, and lift-, drag- and undulating swimming locomotion. M.C. analysed and wrote draft versions of the introduction, legged, jumping, and jet propulsion locomotion, alternative locomotion and the conclusion. C.L. revised all content and defined the final versions of sections. All authors gave final approval for publication.
Competing interests
We declare we have no competing interests.
Funding
No funding has been received for this article.
References
- 1.Laschi C, Mazzolai B, Cianchetti M. 2016. Soft robotics: technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 1, eaah3690 ( 10.1126/scirobotics.aah3690) [DOI] [PubMed] [Google Scholar]
- 2.Rus D, Tolley MT. 2015. Design, fabrication and control of soft robots. Nature 521, 467–475. ( 10.1038/nature14543) [DOI] [PubMed] [Google Scholar]
- 3.Kovač M. 2014. The bioinspiration design paradigm: a perspective for soft robotics. Soft Robot. 1, 28–37. ( 10.1089/soro.2013.0004) [DOI] [Google Scholar]
- 4.Alexander RN. 2006. Principles of animal locomotion. Princeton, NJ: Princeton University Press. [Google Scholar]
- 5.Nemitz MP, Mihaylov P, Barraclough TW, Ross D, Stokes AA. 2016. Using voice coils to actuate modular soft robots: wormbot, an example. Soft Robot. 3, 198–204. ( 10.1089/soro.2016.0009) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 6.Di Luca M, Mintchev S, Heitz G, Noca F, Floreano D. 2016. Bioinspired morphing wings for extended flight envelope and roll control of small drones. Interface Focus 7, 20160092. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 7.Cianchetti M, Calisti M, Margheri L, Kuba M, Laschi C. 2015. Bioinspired locomotion and grasping in water: the soft eight-arm OCTOPUS robot. Bioinspir. Biomim. 10, 35003 ( 10.1088/1748-3190/10/3/035003) [DOI] [PubMed] [Google Scholar]
- 8.Albu-Schaffer A, et al. 2008. Soft robotics. IEEE Robot Autom. Mag. 15, 20–30. ( 10.1109/MRA.2008.927979) [DOI] [Google Scholar]
- 9.Schuldt DW, Rife J, Trimmer B. 2015. Template for robust soft-body crawling with reflex-triggered gripping. Bioinspir. Biomim. 10, 16018 ( 10.1088/1748-3190/10/1/016018) [DOI] [PubMed] [Google Scholar]
- 10.Trimmer BA, Takesian AE, Sweet BM, Rogers CB, Hake DC, Rogers DJ. 2006. Caterpillar locomotion: a new model for soft-bodied climbing and burrowing robots In 7th Int. Symp. on Technology and the Mine Problem, Monterey, CA, 2–5 May 2006, pp. 1–10. [Google Scholar]
- 11.Trimmer BA, Lin HT, Baryshyan A, Leisk GG, Kaplan DL. 2012. Towards a biomorphic soft robot: design constraints and solutions In Proc. IEEE RAS EMBS Int. Conf. Biomed. Robot Biomechatronics, Rome, Italy, 24–27 July 2012, pp. 599–605. [Google Scholar]
- 12.Umedachi T, Vikas V, Trimmer BA. 2013. Highly deformable 3-d printed soft robot generating inching and crawling locomotions with variable friction legs In 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013, pp. 4590–4595. [Google Scholar]
- 13.Umedachi T, Vikas V, Trimmer BA. 2016. Softworms: the design and control of non-pneumatic, 3D-printed, deformable robots. Bioinspir. Biomim. 11, 25001 ( 10.1088/1748-3190/11/2/025001) [DOI] [PubMed] [Google Scholar]
- 14.Onal CD, Wood RJ, Rus D. 2013. An origami-inspired approach to worm robots. IEEE-ASME Trans. Mech. 18, 430–438. ( 10.1109/TMECH.2012.2210239) [DOI] [Google Scholar]
- 15.Jung K, Koo J, Nam J, Lee Y, Choi H. 2007. Artificial annelid robot driven by soft actuators. Bioinspir. Biomim. 2, S42–S49. ( 10.1088/1748-3182/2/2/S05) [DOI] [PubMed] [Google Scholar]
- 16.Shepherd RF, Ilievski F, Choi W, Morin SA, Stokes AA, Mazzeo AD, Chen X, Wang M, Whitesides GM. 2011. Multigait soft robot. Proc. Natl Acad. Sci. USA 111, 20 400–20 403. ( 10.1073/pnas.1116564108) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 17.Calisti M, Giorelli M, Levy G, Mazzolai B, Hochner B, Laschi C, Dario P. 2001. An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspir. Biomim. 6, 36002 ( 10.1088/1748-3182/6/3/036002) [DOI] [PubMed] [Google Scholar]
- 18.Calisti M, Giorelli M, Laschi C. 2012. A locomotion strategy for an octopus-bioinspired robot. In Living machines, 9 to 12 July 2012 (eds Prescott TJ, Lepora NF, Mura A, PVerschure FMJ.), pp. 337–338. Sheffield, UK: Springer; (Lecture Notes in Computer Science; vol. 7375). [Google Scholar]
- 19.Mao S, Dong E, Zhang S, Xu M, Yang J. 2013. A new soft bionic starfish robot with multi-gaits In 2013 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), Wollogong, Australia, 9–12 July 2013, pp. 1312–1317. [Google Scholar]
- 20.Calisti M, Corucci F, Arienti A, Laschi C. 2015. Dynamics of underwater legged locomotion: modeling and experiments on an octopus-inspired robot. Bioinspir. Biomim. 10, 46012 ( 10.1088/1748-3190/10/4/046012) [DOI] [PubMed] [Google Scholar]
- 21.Kier WM, Smith KK. 1985. Tongues, tentacles and trunks: the biomechanics of movement in muscular-hydrostats. Zool. J. Linn. Soc. 83, 307–324. ( 10.1111/j.1096-3642.1985.tb01178.x) [DOI] [Google Scholar]
- 22.Boxerbaum AS, Horchler AD, Shaw KM, Chiel HJ, Quinn RD. 2012. Worms, waves and robots In Proc. IEEE Int. Conf. on Robotics and Automation, Saint Paul, MN, 14–18 May 2012, pp. 3537–3538. [Google Scholar]
- 23.Seok S, Onal C, Wood R, Rus D, Kim S. 2010. Peristaltic locomotion with antagonistic actuators in soft robotics In 2010 IEEE Int. Conf. on Robotics and Automation (ICRA), Anchorage, AK, 3–8 May 2010. [Google Scholar]
- 24.Seok S, Onal CD, Kyu-Jin C, Wood RJ, Rus D, Sangbae K. 2013. Meshworm: a peristaltic soft robot with antagonistic nickel titanium coil actuators. IEEE/ASME Trans. Mech. 18, 1485–1497. ( 10.1109/TMECH.2012.2204070) [DOI] [Google Scholar]
- 25.Daltorio KA, Boxerbaum AS, Horchler AD, Shaw KM, Chiel HJ, Quinn RD. 2013. Efficient worm-like locomotion: slip and control of soft-bodied peristaltic robots. Bioinspir. Biomim. 8, 35003 ( 10.1088/1748-3182/8/3/035003) [DOI] [PubMed] [Google Scholar]
- 26.Menciassi A, Gorini S, Pernorio G, Weiting L, Valvo F, Dario P. 2004. Design, fabrication and performances of a biomimetic robotic earthworm In 2004 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), Shenyang, China, 22–26 August 2004, pp. 274–278. [Google Scholar]
- 27.Mangan EV, Kingsley DA, Quinn RD, Chiel HJ. 2002. Development of a peristaltic endoscope In 2002 IEEE Int. Conf. on Robotics and Automation (ICRA), Washington, DC, 11–15 May 2002, pp. 347–352. [Google Scholar]
- 28.Wehner M, Truby RL, Fitzgerald DJ, Mosadegh B, Whitesides GM, Lewis JA, Wood RJ. 2016. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 536, 451–455. ( 10.1038/nature19100) [DOI] [PubMed] [Google Scholar]
- 29.Tolley MT, et al. 2014. A resilient, untethered soft robot. Soft Robot. 1, 213–223. ( 10.1089/soro.2014.0008) [DOI] [Google Scholar]
- 30.Onal CD, Rus D. 2013. Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot. Bioinspir. Biomim. 8, 26003 ( 10.1088/1748-3182/8/2/026003) [DOI] [PubMed] [Google Scholar]
- 31.Luo M, Tao W, Chen F, Khuu TK, Ozel S, Onal CD. 2014. Design improvements and dynamic characterization on fluidic elastomer actuators for a soft robotic snake In 2014 IEEE Int. Conf. on Technologies for Practical Robot Applications (TePRA), Boston, MA, 14 to 15 April 2004, pp. 1–6. [Google Scholar]
- 32.Yuk H, Kim D, Lee H, Jo S, Shin JH. 2011. Shape memory alloy-based small crawling robots inspired by C. elegans. Bioinspir. Biomim. 6, 46002 ( 10.1088/1748-3182/6/4/046002) [DOI] [PubMed] [Google Scholar]
- 33.Blickhan R. 1989. The spring-mass model for running and hopping. J. Biomech. 22, 1217–1227. ( 10.1016/0021-9290(89)90224-8) [DOI] [PubMed] [Google Scholar]
- 34.Blickhan R, Full RJ. 1993. Similarity in multilegged locomotion: bouncing like a monopode. J. Comp. Physiol. A. 173, 509–517. ( 10.1007/BF00197760) [DOI] [Google Scholar]
- 35.Hodgins JK, Raibert M. 1991. Adjusting step length for rough terrain locomotion. IEEE Trans. Robot. Autom. 7, 289–298. ( 10.1109/70.88138) [DOI] [Google Scholar]
- 36.Andrews B, Miller B, Schmitt J, Clark JE. 2011. Running over unknown rough terrain with a one-legged planar robot. Bioinspir. Biomim. 6, 26009 ( 10.1088/1748-3182/6/2/026009) [DOI] [PubMed] [Google Scholar]
- 37.Calisti M, Falotico E, Laschi C. 2016. Hopping on uneven terrains with an underwater one-legged robot. IEEE Robot. Autom. Lett. 1, 461–468. ( 10.1109/LRA.2016.2521928) [DOI] [Google Scholar]
- 38.Altendorfer R, Moore N, Komsuoglu H, Buehler M, Brown HB Jr, McMordie D, Saranli U, Full RJ, Koditschek DE. 2001. RHex: a biologically inspired hexapod runner. Auton. Robots 11, 207–213. ( 10.1023/A:1012426720699) [DOI] [Google Scholar]
- 39.Kim S, Clark JE, Cutkosky MR. 2006. iSprawl: design and tuning for high-speed autonomous open-loop running. Int. J. Rob. Res. 25, 903–912. ( 10.1177/0278364906069150) [DOI] [Google Scholar]
- 40.Galloway Kevin C, Jonathan E, Koditschek DE. 2009. Design of a tunable stiffness composite leg for dynamic locomotion In ASME Int. Des. Eng. Tech. Conf. Comput. Inf. Eng. Conf., San Diego, CA, 30 August 2009, pp. 215–222. [Google Scholar]
- 41.Jun J-Y, Clark JE. 2015. Characterization of running with compliant curved legs. Bioinspir. Biomim. 10, 46008 ( 10.1088/1748-3190/10/4/046008) [DOI] [PubMed] [Google Scholar]
- 42.Brown B, Zeglin G. 1998. The bow leg hopping robot In Proc. of 1998 IEEE Int. Conf. on Robotics and Automation (ICRA), Leuven, Belgium, 16–20 May 1998, vol. 1, pp. 781–786. [Google Scholar]
- 43.Iida F, Rummel J, Seyfarth A. 2008. Bipedal walking and running with spring-like biarticular muscles. J. Biomech. 21, 656–667. ( 10.1016/j.jbiomech.2007.09.033) [DOI] [PubMed] [Google Scholar]
- 44.Raibert M, Chepponis M, Brown H. 1986. Running on four legs as though they were one. IEEE J. Robot. Autom. 2, 70–82. ( 10.1109/JRA.1986.1087044) [DOI] [Google Scholar]
- 45.Blickhan R, Seyfarth A, Geyer H, Grimmer S, Wagner H, Günther M. 2007. Intelligence by mechanics. Phil. Trans. R. Soc. A 365, 199–220. ( 10.1098/rsta.2006.1911) [DOI] [PubMed] [Google Scholar]
- 46.Spröwitz A, Tuleu A, Vespignani M, Ajallooeian M, Badri E, Ijspeert AJ. 2013. Towards dynamic trot gait locomotion: design, control, and experiments with cheetah-cub, a compliant quadruped robot. Int. J. Robot. Res. 32, 932–950. ( 10.1177/0278364913489205) [DOI] [Google Scholar]
- 47.Ringrose R. 1997. Self-stabilizing running In IEEE Int. Conf. on Robotics and Automation (ICRA), Albuquerque, NM, 20–25 April 1997, vol. 1, pp. 487–493. [Google Scholar]
- 48.Hutter M, Remy CD, Hoepflinger MA, Siegwart R. 2013. Efficient and versatile locomotion with highly compliant legs. IEEE ASME Trans. Mech. 18, 449–458. ( 10.1109/TMECH.2012.2222430) [DOI] [Google Scholar]
- 49.Renjewski D, Spröwitz A, Hurst J. 2013. ATRIAS---a human size compliant bipedal robot walks efficiently In Proc. on Dynamic Walking, Pittsburgh, PA, 10–13 June 2013. [Google Scholar]
- 50.Ackerman J, Seipel J. 2013. Energy efficiency of legged robot locomotion with elastically suspended loads. IEEE Trans. Robot. 29, 321–330. ( 10.1109/TRO.2012.2235698) [DOI] [Google Scholar]
- 51.Corucci F, Calisti M, Hauser H, Laschi C. 2015. Novelty-based evolutionary design of morphing underwater robots In Proc. of the 2015 Annu. Conf. on Genetic and Evolutionary Computation, 11–15 June 2015, pp. 145–152. New York, NY: ACM. [Google Scholar]
- 52.Corucci F, Calisti M, Hauser H, Laschi C. 2015. Evolutionary discovery of self-stabilized dynamic gaits for a soft underwater legged robot In 2015 Int. Conf. on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July, pp. 337–344. [Google Scholar]
- 53.Geyer H, Seyfarth A, Blickhan R. 2006. Compliant leg behaviour explains basic dynamics of walking and running. Proc. R. Soc. B 273, 2861–2867. ( 10.1098/rspb.2006.3637) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 54.Iida F, Minekawa Y, Rummel J, Seyfarth A. 2009. Toward a human-like biped robot with compliant legs. Robot. Auton. Syst. 57, 139–144. ( 10.1016/j.robot.2007.12.001) [DOI] [Google Scholar]
- 55.Visser LC, de Geus W, Stramigioli S, Carloni R. 2012. Human-like walking with compliant legs In Proc. 4th Work Human-Friendly Robot (HFR 2011), Twente, The Netherlands, 8–9 November 2011. [Google Scholar]
- 56.Rummel J, Blum Y, Maus HM, Rode C, Seyfarth A. 2010. Stable and robust walking with compliant legs In 2010 IEEE Int. Conf. on Robotics and Automation (ICRA), Anchorage, AK, 3–8 May 2010, pp. 5250–5255. [Google Scholar]
- 57.Hirose S, Kikuchi H, Umetani Y. 1986. The standard circular gait of a quadruped walking vehicle. Adv. Robot. 1, 143–164. ( 10.1163/156855386X00058) [DOI] [Google Scholar]
- 58.Zheng T, et al. 2013. Octopus inspired walking robot: design, control and experimental validation In 2013 IEEE Int. Conf. on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013, pp. 816–821. New York, NY: IEEE. [Google Scholar]
- 59.Godage IS, Nanayakkara T, Caldwell DG. 2012. Locomotion with continuum limbs In 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012, pp. 293–298. [Google Scholar]
- 60.Doroftei I. 2015. A hexapod walking micro-robot with artificial muscles In Proceedings of MAMM 2014 Microactuators and Micromechanisms (eds E-C Lovasz, GK Ananthasuresh, B Corves, V Petuya), Timisoara, Romania, 2–4 October 2014, pp. 99–120. Cham, Switzerland: Springer International Publishing. [Google Scholar]
- 61.Pei Q, Rosenthal MA, Pelrine R, Stanford S, Kornbluh RD. 2003. Multifunctional electroelastomer roll actuators and their application for biomimetic walking robots. In Proc. SPIE 5051 Smart structures and materials, San Diego, CA, 2 March, pp. 281–290. [Google Scholar]
- 62.Kenneally G, De A, Koditschek DE. 2016. Design principles for a family of direct-drive legged robots. IEEE Robot. Autom. Lett. 1, 900–907. ( 10.1109/LRA.2016.2528294) [DOI] [Google Scholar]
- 63.Haldane DW, Plecnik M, Yim JK, Fearing RS. 2016. A power modulating leg mechanism for monopedal hopping In 2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016, pp. 4757–4764. [Google Scholar]
- 64.Zaitsev V, Gvirsman O, Ben Hanan U, Weiss A, Ayali A, Kosa G. 2015. Locust-inspired miniature jumping robot. Bioinspir. Biomim. 0, 553–558. [DOI] [PubMed] [Google Scholar]
- 65.Woodward MA, Sitti M. 2014. MultiMo-Bat: a biologically inspired integrated jumping--gliding robot. Int. J. Rob. Res. 33, 1511–1529. ( 10.1177/0278364914541301) [DOI] [Google Scholar]
- 66.Jung G-P, Casarez CS, Jung S-P, Fearing RS, Cho K-J. 2016 An integrated jumping-crawling robot using height-adjustable jumping module. In 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May, pp. 4680–4685. Piscataway, NJ: IEEE.
- 67.Low KH, Hu T, Mohammed S, Tangorra J, Kovac M. 2015. Perspectives on biologically inspired hybrid and multi-modal locomotion. Bioinspir. Biomim. 10, 20301 ( 10.1088/1748-3190/10/2/020301) [DOI] [PubMed] [Google Scholar]
- 68.Driessen JJM. 2015. Machine and behaviour co-design of a powerful minimally actuated hopping robot. Delft, The Netherlands: Delft University of Technology. [Google Scholar]
- 69.Brill AL, De A, Johnson AM, Koditschek DE. 2015. Tail-assisted rigid and compliant legged leaping In 2015 IEEE Int. Conf. on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015, pp. 6304–6311. [Google Scholar]
- 70.Haldane DW, Plecnik MM, Yim JK, Fearing RS. 2016. Robotic vertical jumping agility via series-elastic power modulation. Sci. Robot. 1, eaag2048 ( 10.1126/scirobotics.aag2048) [DOI] [PubMed] [Google Scholar]
- 71.Bartlett NW, et al. 2015. A 3D-printed, functionally graded soft robot powered by combustion. Science 349, 161–165. ( 10.1126/science.aab0129) [DOI] [PubMed] [Google Scholar]
- 72.Kovač M, Schlegel M, Zufferey JC, Floreano D. 2010. Steerable miniature jumping robot. Auton. Robots 28, 295–306. ( 10.1007/s10514-009-9173-4) [DOI] [Google Scholar]
- 73.Sugiyama Y, Hirai S. 2004. Crawling and jumping of deformable soft robot In Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3276–3281. [Google Scholar]
- 74.Roberts TJ, Azizi E. 2011. Flexible mechanisms: the diverse roles of biological springs in vertebrate movement. J. Exp. Biol. 214, 353–361. ( 10.1242/jeb.038588) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 75.Galantis A, Woledge RC. 2003. The theoretical limits to the power output of a muscle--tendon complex with inertial and gravitational loads. Proc. R. Soc. Lond. B 270, 1493–1498. ( 10.1098/rspb.2003.2403) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 76.Sofla AYN, Meguid SA, Tan KT, Yeo WK. 2010. Shape morphing of aircraft wing: status and challenges. Mater. Des. 31, 1284–1292. ( 10.1016/j.matdes.2009.09.011) [DOI] [Google Scholar]
- 77.Blondeau J, Pines D. 2003. Wind tunnel testing of a morphing aspect ratio wing using an pneumatic telescoping spar In 2nd AIAA ‘Unmanned Unlimited’ Conf. Work Exhib., San Diego, CA, 15–18 September. [Google Scholar]
- 78.Siddall R, Ortega AA, Kovac M. 2017. Wind and water tunnel testing of a morphing aquatic micro air vehicle. Interface Focus 7, 20160085 ( 10.1098/rsfs.2016.0085) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 79.Vasista S, Tong L, Wong KC. 2012. Realization of morphing wings: a multidisciplinary challenge. J. Aircraft 49, 11–28. ( 10.2514/1.C031060) [DOI] [Google Scholar]
- 80.Jardine AP, Bartley-Cho JD, Flanagan JS. 1999. Improved design and performance of the SMA torque tube for the DARPA Smart Wing Program In 1999 Symp. on Smart Structures and Materials, Newport Beach, CA, 1–5 March 1999, pp. 260–299. [Google Scholar]
- 81.Bartley-Cho JD, Wang DP, Martin CA, Kudva JN, West MN. 2004. Development of high-rate, adaptive trailing edge control surface for the smart wing phase 2 wind tunnel model. J. Intell. Mater. Syst. Struct. 15, 279–291. ( 10.1177/1045389X04042798) [DOI] [Google Scholar]
- 82.Bleischwitz R, de Kat R, Ganapathisubramani B. 2015. Aspect-ratio effects on aeromechanics of membrane wings at moderate Reynolds numbers. AIAA J. 53, 780–788. ( 10.2514/1.J053522) [DOI] [Google Scholar]
- 83.Bleischwitz R, De Kat R, Ganapathisubramani B. 2016. Dynamics of flexible wings in and out of ground effect In 18th Int. Symp. on Application of Laser Techniques to Fluid Mechanics, Lisbon, Portugal, 4–7 July 2016. [Google Scholar]
- 84.Madangopal R, Khan ZA, Agrawal SK. 2006. Energetics-based design of small flapping-wing micro air vehicles. IEEE ASME Trans. Mech. 11, 433–438. ( 10.1109/TMECH.2006.878525) [DOI] [Google Scholar]
- 85.Zhao L, Huang Q, Deng X, Sane SP. 2010. Aerodynamic effects of flexibility in flapping wings. J. R. Soc. Interface 7, 485–497. ( 10.1098/rsif.2009.0200) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 86.Tanaka H, Okada H, Shimasue Y, Liu H. 2015. Flexible flapping wings with self-organized microwrinkles. Bioinspir. Biomim. 10, 46005 ( 10.1088/1748-3190/10/4/046005) [DOI] [PubMed] [Google Scholar]
- 87.Mueller D, Gerdes JW. 2009. Incorporation of passive wing folding in flapping wing miniature air vehicles In ASME Mechanism and Robotics Conf. (ASME 2009 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference), San Diego, CA, August 30–September 2 2009. [Google Scholar]
- 88.Gerdes J, et al. 2014. Robo Raven: a flapping-wing air vehicle with highly compliant and independently controlled wings. Soft Robot. 1, 275–288. ( 10.1089/soro.2014.0019) [DOI] [Google Scholar]
- 89.Ramezani A, Chung S, Hutchinson S. 2017. A biomimetic robotic platform to study flight specializations of bats. Sci. Robot 2, 1–13. [DOI] [PubMed] [Google Scholar]
- 90.Ma KY, Chirarattananon P, Fuller SB, Wood RJ. 2013. Controlled flight of a biologically inspired, insect-scale robot. Science 340, 603–607. ( 10.1126/science.1231806) [DOI] [PubMed] [Google Scholar]
- 91.Cox A, Monopoli D, Cveticanin D, Goldfarb M, Garcia E. 2002. The development of elastodynamic components for piezoelectrically actuated flapping micro-air vehicles. J. Intell. Mater. Syst. Struct. 13, 611–615. ( 10.1106/104538902032463) [DOI] [Google Scholar]
- 92.Kang CK, Shyy W. 2013. Scaling law and enhancement of lift generation of an insect-size hovering flexible wing. J. R. Soc. Interface. 10, 20130361 ( 10.1098/rsif.2013.0361) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 93.Suzumori K, Endo S, Kanda T, Kato N, Suzuki H. 2007. A bending pneumatic rubber actuator realizing soft-bodied manta swimming robot In Proc. of IEEE 2007 Int. Conf. on Robotics and Automation (ICRA), Rome, Italy, 10–14 April 2007, pp. 4975–4980. [Google Scholar]
- 94.Wang Z, Wang Y, Li J, Hang G. 2009. A micro biomimetic manta ray robot fish actuated by SMA In 2009 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009, pp. 1809–1813. [Google Scholar]
- 95.Chen Z, Um TI, Bart-Smith H. 2012. Bio-inspired robotic manta ray powered by ionic polymer–metal composite artificial muscles. Int. J. Smart. Nano Mater. 3, 296–308. ( 10.1080/19475411.2012.686458) [DOI] [Google Scholar]
- 96.Gao J, Bi S, Xu Y, Liu C. 2007. Development and design of a robotic manta ray featuring flexible pectoral fins In 2007 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), Sanya, China, 15–18 December 2007, pp. 519–523. [Google Scholar]
- 97.Kim H-J, Song S-H, Ahn S-H. 2013. A turtle-like swimming robot using a smart soft composite (SSC) structure. Smart Mater. Struct. 22, 14007 ( 10.1088/0964-1726/22/1/014007) [DOI] [Google Scholar]
- 98.Song S-H, Kim M-S, Rodrigue H, Lee J-Y, Shim J-E, Kim M-C, Chu WS, Ahn SH. 2016. Turtle mimetic soft robot with two swimming gaits. Bioinspir. Biomim. 11, 36010 ( 10.1088/1748-3190/11/3/036010) [DOI] [PubMed] [Google Scholar]
- 99.Ramananarivo S, Godoy-Diana R, Thiria B. 2013. Passive elastic mechanism to mimic fish-muscle action in anguilliform swimming. J. R. Soc. Interface. 10, 20130667 ( 10.1098/rsif.2013.0667) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 100.Low KH, Yang J, Pattathil AP, Zhang Y. 2006. Initial prototype design and investigation of an undulating body by SMA In 2006 IEEE Int. Conf. on Automation Science and Engineering (CASE), Shangai, China, 8–10 October 2006, pp. 472–477. [Google Scholar]
- 101.Ayers J, Wilbur C, Olcott C. 2000. Lamprey robots In Proc. Int. Symp. Aqua Biomechanisms, Citeseer. [Google Scholar]
- 102.Westphal A, Rulkov NF, Ayers J, Brady D, Hunt M. 2011. Controlling a lamprey-based robot with an electronic nervous system. Smart. Struct. Syst. 8, 39–52. ( 10.12989/sss.2011.8.1.039) [DOI] [Google Scholar]
- 103.Harper KA, Berkemeier MD, Grace S. 1997. Decreasing the energy costs of swimming robots through passive elastic elements In Proc. of 1997 IEEE Int. Conf. on Robotics and Automation, Albuquerque, NM, 20–25 April 1997, pp. 1839–1844. [Google Scholar]
- 104.Jung J, Kim B, Tak Y, Park J-O. 2003. Undulatory tadpole robot (TadRob) using ionic polymer metal composite (IPMC) actuator In Proc. of 2003 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), St Louis, MO, 11–15 October 2003, pp. 2133–2138. [Google Scholar]
- 105.Punning A, Anton M, Kruusmaa M, Aabloo A. 2004. A biologically inspired ray-like underwater robot with electroactive polymer pectoral fins In Int. IEEE Conf. on Mechatronics and Robotics, Shenyang, China, 22–26 August 2004, pp. 241–245. [Google Scholar]
- 106.Guo S, Fukuda T, Asaka K. 2003. A new type of fish-like underwater microrobot. IEEE ASME Trans. Mech. 8, 136–141. ( 10.1109/TMECH.2003.809134) [DOI] [Google Scholar]
- 107.Wang Z, Hang G, Li J, Wang Y, Xiao K. 2008. A micro-robot fish with embedded SMA wire actuated flexible biomimetic fin. Sens. Actuat. A Phys. 144, 354–360. ( 10.1016/j.sna.2008.02.013) [DOI] [Google Scholar]
- 108.Ye X, Su Y, Guo S, Wang L. 2008. Design and realization of a remote control centimeter-scale robotic fish In 2008 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, Xian, China, 2–5 July 2008, pp. 25–30. [Google Scholar]
- 109.Heo S, Wiguna T, Park HC, Goo NS. 2007. Effect of an artificial caudal fin on the performance of a biomimetic fish robot propelled by piezoelectric actuators. J. Bionic Eng. 4, 151–158. ( 10.1016/S1672-6529(07)60027-4) [DOI] [Google Scholar]
- 110.Jia X, Chen Z, Riedel A, Si T, Hamel WR, Zhang M. 2015. Energy-efficient surface propulsion inspired by whirligig beetles. IEEE Trans. Robot. 31, 1432–1443. ( 10.1109/TRO.2015.2493501) [DOI] [Google Scholar]
- 111.Kwak B, Bae J. 2016. Design of a robot with biologically-inspired swimming hairs for fast and efficient mobility in aquatic environment In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016, pp. 4970–4975. [Google Scholar]
- 112.Conte J, Modarres-Sadeghi Y, Watts MN, Hover FS, Triantafyllou MS. 2010. A fast-starting mechanical fish that accelerates at 40 ms-2. Bioinspir. Biomim. 5, 35004 ( 10.1088/1748-3182/5/3/035004) [DOI] [PubMed] [Google Scholar]
- 113.Marchese AD, Onal CD, Rus D. 2014. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators. Soft Robot. 1, 75–87. ( 10.1089/soro.2013.0009) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 114.Sfakiotakis M, Kazakidi A, Pateromichelakis N, Tsakiris DP. 2013. Octopus-inspired eight-arm robotic swimming by sculling movements In 2013 IEEE Int. Conf. on Robotics and Automation (ICRA), 6–10 May 2013, Karlsruhe, Germany New York, NY: IEEE. [Google Scholar]
- 115.Suleman A, Crawford C. 2008. Design and testing of a biomimetic tuna using shape memory alloy induced propulsion. Comput. Struct. 86, 491–499. ( 10.1016/j.compstruc.2007.02.007) [DOI] [Google Scholar]
- 116.Krieg M, Mohseni K. 2010. Dynamic modeling and control of biologically inspired vortex ring thrusters for underwater robot locomotion. IEEE Trans. Robot. 26, 542–554. ( 10.1109/TRO.2010.2046069) [DOI] [Google Scholar]
- 117.Moslemi AA, Krueger PS. 2010. Propulsive efficiency of a biomorphic pulsed-jet underwater vehicle. Bioinspir. Biomim. 5, 1–14. ( 10.1088/1748-3182/5/3/036003) [DOI] [PubMed] [Google Scholar]
- 118.Krieg M, Sledge I, Mohseni K. 2015. Design considerations for an underwater soft-robot inspired from marine invertebrates. Bioinspir. Biomim. 10, 65004 ( 10.1088/1748-3190/10/6/065004) [DOI] [PubMed] [Google Scholar]
- 119.Villanueva A, Smith C, Priya S. 2011. A biomimetic robotic jellyfish (Robojelly) actuated by shape memory alloy composite actuators. Bioinspir. Biomim. 6, 36004 ( 10.1088/1748-3182/6/3/036004) [DOI] [PubMed] [Google Scholar]
- 120.Tadesse Y, Villanueva A, Haines C, Novitski D, Baughman R, Priya S. 2012. Hydrogen-fuel-powered bell segments of biomimetic jellyfish. Smart Mater. Struct. 21, 045013 ( 10.1088/0964-1726/21/4/045013) [DOI] [Google Scholar]
- 121.Najem J, Sarles SA, Akle B, Leo DJ. 2012. Biomimetic jellyfish-inspired underwater vehicle actuated by ionic polymer metal composite actuators. Smart Mater. Struct. 21, 94026 ( 10.1088/0964-1726/21/9/094026) [DOI] [Google Scholar]
- 122.Marut K, Stewart C, Michael T, Villanueva A, Priya S. 2013. A jellyfish-inspired jet propulsion robot actuated by an iris mechanism. Smart Mater. Struct. 22, 94021 ( 10.1088/0964-1726/22/9/094021) [DOI] [Google Scholar]
- 123.Godaba H, Li J, Wang Y, Zhu J. 2016. A soft jellyfish robot driven by a dielectric elastomer actuator. IEEE Robot. Autom. Lett. 1, 624–631. ( 10.1109/LRA.2016.2522498) [DOI] [Google Scholar]
- 124.Giorgio Serchi F, Arienti A, Laschi C. 2013. Biomimetic vortex propulsion: toward the new paradigm of soft unmanned underwater vehicles. IEEE/ASME Trans. Mech. 18, 484–493. ( 10.1109/TMECH.2012.2220978) [DOI] [Google Scholar]
- 125.Giorgio-Serchi F, Arienti A, Laschi C. 2016. Underwater soft-bodied pulsed-jet thrusters: actuator modeling and performance profiling. Int. J. Rob. Res. 35, 1308–1329. [Google Scholar]
- 126.Renda F, Giorgio-Serchi F, Boyer F, Laschi C. 2015. Modelling cephalopod-inspired pulsed-jet locomotion for underwater soft robots. Bioinspir. Biomim. 10, 55005 ( 10.1088/1748-3190/10/5/055005) [DOI] [PubMed] [Google Scholar]
- 127.Arienti A, Calisti M, Giorgio-Serchi F, Laschi C. 2013. PoseiDRONE: design of a soft-bodied ROV with crawling, swimming and manipulation ability In 2013 MTS/IEEE OCEANS Conf., San Diego, CA, 23–26 September 2013, pp. 1–7. [Google Scholar]
- 128.Jian L, Jianing Z, Zhenlong W. 2016. CFD simulation of effect of vortex ring for squid jet propulsion and experiments on a bionic jet propulsor. Int. J. u- and e-Service Sci. Technol. 9, 211–226. ( 10.14257/ijunesst.2016.9.5.19) [DOI] [Google Scholar]
- 129.Storz A.2013. Underwater propulsion from a 3D printer. Research News 1. 37, 153–167. (https://www.fraunhofer.de/en/press/research-news/2013/july/underwater-propulsion-from-a-3d-printer.html. )
- 130.Weymouth GD, Trantafyllou MS. 2013. Ultra-fast escape of a deformable jet-propelled body. J. Fluid Mech. 721, 36–385. ( 10.1017/jfm.2013.65) [DOI] [Google Scholar]
- 131.Giorgio-Serchi F, Weymouth GD.2016. Drag cancellation by added-mass pumping. (http://arxiv.org/abs/1604.02663. )
- 132.Paul C, Valero-Cuevas FJ, Lipson H. 2006. Design and control of tensegrity robots for locomotion. IEEE Trans. Robot. 22, 944–957. ( 10.1109/TRO.2006.878980) [DOI] [Google Scholar]
- 133.Kim K, et al. 2014. Rapid prototyping design and control of tensegrity soft robot for locomotion In 2014 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), Bali, Indonesia, 5–10 December 2014, pp. 7–14. [Google Scholar]
- 134.Caluwaerts K, et al. 2014. Design and control of compliant tensegrity robots through simulation and hardware validation. J. R. Soc. Interface 11, 1–13. ( 10.1098/rsif.2014.0520) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 135.Steltz E, Mozeika A, Rodenberg N, Brown E, Jaeger H. 2009. JSEL: jamming skin enabled locomotion In 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), St Louis, MO, 10–15 October 2009, pp. 5672–5677. [Google Scholar]
- 136.Reis M, Yu X, Maheshwari N, Iida F. 2012. Morphological computation of multi-gaited robot locomotion based on free vibration. Artif. Life 19, 97–114. ( 10.1162/ARTL_a_00084) [DOI] [PubMed] [Google Scholar]
- 137.Reis M, Iida F. 2014. An energy-efficient hopping robot based on free vibration of a curved beam. IEEE ASME Trans. Mech. 19, 300–311. ( 10.1109/TMECH.2012.2234759) [DOI] [Google Scholar]
- 138.Kühnel DT, Helps T, Rossiter J. 2016. Kinematic analysis of vibrobot: a soft, hopping robot with stiffness-and shape-changing abilities. Front. Robot. AI 3, 60 ( 10.3389/frobt.2016.00060) [DOI] [Google Scholar]
- 139.Ishikura M, Wakana K, Takeuchi E, Konyo M, Tadokoro S. 2011. Running performance evaluation of inchworm drive and vibration drive for active scope camera In 2011 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), Budapest, Hungary, 3–7 July 2011, pp. 599–604. [Google Scholar]
- 140.Namari H, Wakana K, Ishikura M, Konyo M, Tadokoro S. 2012. Tube-type active scope camera with high mobility and practical functionality In 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012, pp. 3679–3686. [Google Scholar]
- 141.Shiotsu A, et al. 2005. Crawling and jumping soft robot KOHARO In 2005 Int. Symp. on Robotics, Tokyo, Japan, 29 November–1 December 2005, pp. 134. [Google Scholar]
- 142.Lee DY, Koh JS, Kim JS, Kim SW, Cho KJ. 2013. Deformable-wheel robot based on soft material. Int. J. Precis. Eng. Manuf. 14, 1439–1445. ( 10.1007/s12541-013-0194-8) [DOI] [Google Scholar]
- 143.Ayers J, Witting J. 2007. Biomimetic approaches to the control of underwater walking machines. Phil. Trans. R. Soc. A 365, 273–295. ( 10.1098/rsta.2006.1910) [DOI] [PubMed] [Google Scholar]
- 144.Nakajima K, Li T, Hauser H, Pfeifer R. 2014. Exploiting short-term memory in soft body dynamics as a computational resource Exploiting short-term memory in soft body dynamics as a computational resource. J. R. Soc. Interface11, 20140437. [DOI] [PMC free article] [PubMed]
- 145.Jayaram K, Full RJ. 2016. Cockroaches traverse crevices, crawl rapidly in confined spaces, and inspire a soft, legged robot. Proc. Natl Acad. Sci. USA 113, E950–E957. ( 10.1073/pnas.1514591113) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 146.Calisti M, Cianchetti M, Manti M, Corucci F, Laschi C. 2016. Contest-driven soft-robotics boost: the robosoft grand challenge. Front. Robot. AI 3, 55 ( 10.3389/frobt.2016.00055) [DOI] [Google Scholar]
- 147.Kitano H, Asada M, Noda I, Matsubara H. 1998. RoboCup: robot world cup. IEEE Robot. Autom. Mag. 5, 30–36. ( 10.1109/100.728221) [DOI] [Google Scholar]
- 148.Guizzo E, Ackerman E. 2015. The hard lessons of DARPA's robotics challenge [News]. IEEE Spectr. 52, 11–13. ( 10.1109/MSPEC.2015.7164385) [DOI] [Google Scholar]
- 149.Schneider FE, Wildermuth D, Wolf HL. 2015. ELROB and EURATHLON: improving search amp; rescue robotics through real-world robot competitions In 2015 10th Int. Workshop on Robot Motion and Control (RoMoCo), Poznan, Poland, 6–8 July 2015, pp 118–123. [Google Scholar]