

INTRODUCTION
Spinal cord injury (SCI) affects an estimated 270,000 people in the United States,1 and causes a debilitating loss of function and sensation below the injury level. SCI is classified according to the severity of the injury, using clinically apparent features to describe sensory and motor function. The American Spinal Injury Association (ASIA) has established International Standards for the Neurological Classification of Spinal Cord Injury (ISNCSCI). This exam, performed through clinical observation, classifies SCI patients into motor complete or incomplete injury.2 A motor complete injury, classified as A or B on the ASIA Impairment Scale (AIS) is defined as the lack of preserved sensory or motor function in the sacral segments S4-S5 (AIS A) or sensation preserved at the S4-5 segment and no motor function preserved more than three levels below the motor level on either side of the body (AIS B). Here, motor function is based on the presence of visible or palpable muscle contraction. While this classification is clinically useful, the ISNCSCI neurological exam does not include electrophysiological testing. Thus it lacks sensitivity to differentiate small levels of residual function.
Many studies have demonstrated the presence of intact neuronal axons across the spinal cord lesion, even in “clinically complete” cases - those diagnosed through standard clinical testing as complete SCI. Anatomical examination has revealed spinal cord parenchyma continuity often remains even after severe spinal injuries.3 Anatomical studies reported that ~50%4,5 to 75%6 of “clinically complete” SCI showed some continuity across the injured segments. Additionally, physiological studies using EMG recordings were used to demonstrate continuity of pathways across the lesion in complete SCI as early as 1986.7 McKay et al found evidence of residual motor control in 64% of subjects initially classified as motor complete (n=67)8. In another study, Calancie et al9 reported a small but distinct group of individuals classified as motor complete that retained voluntary EMG control over one muscle in the foot. Sherwood et al10 defined the term “discomplete” to describe a lesion which is clinically complete but is accompanied by neurophysiological evidence of residual brain influence on spinal cord function below the lesion.
Depending on the joint resistance and the number of motor units activated, it is quite possible for motor unit activity to occur without producing measurable joint movement or force.11 Thus, even a person diagnosed with motor complete SCI may still retain the ability to produce some degree of voluntary muscle activity below their injury level. Though in the past such low-level below-injury activity may have had limited utility, today’s rehabilitative and restorative technologies might be able to use this activity to assist or restore function.
Neuroprostheses (NPs) are implantable devices that utilize small electrical currents to activate peripheral motor nerves. This results in controlled contraction of paralyzed muscles, to restore functions such as hand grasp, standing, walking, respiratory function, and bowel and bladder control.12 These devices require command inputs under the user’s control. In particular, EMG has become the desired means of control of clinically based upper extremity neuroprosthetics13. In this implementation, EMG signals are taken from muscles under volitional control that are innervated above the lesion and are used to control hand-arm manipulation. Increasing the complexity of these systems, such as improving hand dexterity in a grasp system, or incorporating several restored functions into one device, will require an increased number of command signals. It may be possible to use EMG activity from below the injury to substitute for or augment those control muscles above the injury.
In light of this, quantifying residual myoelectric activity in chronic, motor complete SCI is an important task, and a first step toward utilizing this residual activity. It is theorized that axons leading to distal musculature are more likely to be spared due to the somatotopy of the spinal tracts14, which suggests the lower extremity as one possible location to investigate this phenomenon. This study focused on the cervical SCI population. Because cervical level SCI results in the greatest loss of function, they comprise the population which can most benefit from the presence of these signals to be used for neuroprosthetic control.
The purpose of this study was to evaluate volitional motor activity recorded from the lower extremity in cervical SCI subjects diagnosed as motor complete. The goals of this work were to demonstrate the presence of volitional EMG activity below the lesion, and to characterize this activity in order to determine its value for potential use in neurorehabilitative and assistive technologies. This study expands on work published by Moss et al.14 which examined lower extremity EMG signal from 12 motor complete subjects, and found significant activity was evident in 89% of the muscles studied, and at least 2 muscles from each participant were identified as potential command signals for a neuroprosthesis based on 2-state, threshold classification. In this study, data from those subjects plus 12 additional subjects are presented using a novel analysis algorithm which more accurately and automatically identifies signals of interest that would have the greatest potential as command sources.
METHODS
Subjects
All study procedures were approved by the local institutional review board and were carried out after participants gave their informed consent. A total of 24 individuals with cervical level SCI were enrolled. All participants had chronic injuries which ranged in duration from 10 months to 36 years. AIS distribution was 16 AIS A (motor/sensory complete) and 8 AIS B (motor complete/sensory incomplete), based on previous ISNCSCI assessments. Table 1 describes the motor level, time post-injury of assessment, age, and cause of injury of the participants.
Table 1.
Participant Demographic Table.
| Subject | Motor Level | AIS Level | Etiology | Gender | Years Post Injury | Age | Recording Set |
|---|---|---|---|---|---|---|---|
| 1 | C5 | A | MVA | M | 29.8 | 56 | B |
| 2 | C5/C6 | A | Diving | F | 14.0 | 35 | D |
| 3 | C6 | A | MVA | M | 33.2 | 56 | B |
| 4 | C7 | A | GSW | M | 15.1 | 57 | D |
| 5 | C4 | A | GSW | M | 2.7 | 25 | B |
| 6 | C4 | A | Diving | M | 27.0 | 51 | D |
| 7 | C5/C6 | A | MVA | F | 7.3 | 50 | A |
| 8 | C6 | A | MVA | M | 37.6 | 63 | B |
| 9 | C7 | A | BFT | M | 1.6 | 48 | A |
| 10 | C4/C5 | A | MVA | M | 15.3 | 39 | A |
| 11 | C2 | A | MVA | M | 2.3 | 29 | A |
| 12 | C5 | A | Tumor | M | 7.5 | 60 | A |
| 13 | C5/C6 | A | Diving | M | 15.8 | 38 | A |
| 14 | C5 | A | MVA | M | 1.3 | 30 | C |
| 15 | C5/C6 | A | MVA | M | 6.1 | 30 | A |
| 16 | C3/C4 | A | Fall | M | 2.3 | 63 | A |
| 17 | C7 | B | Diving | F | 2.6 | 30 | A |
| 18 | C4 | B | Diving | M | 2.1 | 28 | D |
| 19 | C5 | B | MVA | M | 3.3 | 23 | A |
| 20 | C6 | B | MVA | M | 0.8 | 59 | E |
| 21 | C4 | B | MVA | M | 30.5 | 49 | B |
| 22 | C5/C6 | B | Diving | M | 17.0 | 40 | A |
| 23 | C3 | B | MCA | M | 6.4 | 43 | A |
| 24 | C5 | B | GSW | M | 36.8 | 63 | D |
Abbreviations:
MVA - motor vehicle accident
GSW - Gunshot wound
MCA - Motorcycle accident
BFT - Blunt force trauma.
Set A = AH FDB EDB S TA PL GM GL
Set B = AH ADM FDBM FDBL EDBM EDBL TA PL GM GL VM VL
Set C = AH ADM FDBM FDBL EDBM EDBL TA PL GM GL
Set D = AH ADM FDBM FDBL EDB INTM INTL EHL TA PL GM GL
Set E = AH ADM FDB EDB G TA VM H
Apparatus
Signals were recorded from 8–12 locations in each limb using pairs of surface electrodes. Preamplifiers located close to the electrodes provided an initial gain of 100 and a high pass filter at 10 Hz. Programmable amplifiers (Cambridge Electronic Designs Limited, Cambridge, England) were used for further amplification (gain range 99–3300) with a low-pass anti-aliasing filter at 1 kHz and a 60 Hz notch filter. Signals were sampled at 2.5 kHz and displayed on a computer screen to the participant in real time using either XPC Target and Matlab (The MathWorks, Inc, Natick, MA) or LabVIEW (National Instruments, Austin, TX).
Muscles
EMG activity was recorded from 8–12 muscles located in the foot or lower leg on each side of the body (16–24 muscles total). Prescreening was performed to verify a lack of visible contraction in the muscles during movement attempts before electrodes were affixed. Two surface electrodes were spaced approximately half an inch apart over the muscle belly for differential recording. Muscles were chosen for recording from a set including the abductor hallucis (AH), abductor digiti minimi (ADM), extensor digitorum brevis (EDB), flexor digitorum brevis (FDB), extensor halicus longus (EHL), intrinsic toe extensors (INT), peroneus longus (PL), tibialis anterior (TA), gastrocnemius (G), soleus (S), vastus lateralis (VL), vastus medialis (VM), and hamstring (H). In some cases, a medial and lateral electrode pair (denoted by M and L) were placed over a muscle to attempt to gain better coverage of an area. The specific muscle set recorded for each subject is given in Table 1.
Recording Session
Muscle activity was recorded from all muscles in a single limb during each trial; thus, no simultaneous bilateral recording was done. Participants remained in their wheelchairs during testing. During movement trials, subjects were instructed on a movement type to attempt – for example “lift your ankle” (although no ankle dorsiflexion would be observed). These movements were intended to elicit activity in a targeted muscle, for example, foot dorsiflexion to activate the TA. The participant was instructed to continually and maximally attempt the movement in response to an audio and visual cue lasting three seconds. Each movement trial began in a relaxation state and contained either three or two cues separated by short (5–6s) relaxation periods. Approximately 20–30 trials per limb were performed (2–4 trials per movement type). Participants rested between trials as needed. Before testing, the participants did not receive practice performing the movement types.
Motor Unit Action Potential (MUAP) Detection
The raw EMG data were bandpass filtered with a 3rd order Butterworth filter between 20 and 500 Hz, and notch filtered with a second order IIR filter at 60 Hz. Motor unit action potentials (MUAPs) were identified in a manner similar to that described by Winslow et al.15 A resting threshold was calculated by extracting the first second of data from each trial, in which the participant was instructed to be in a relaxed state. The overall median value of this resting data, after full-wave rectification, was found for each data channel. The spike detection threshold was calculated by multiplying this rest value by an integer multiplier between 10 and 20. This threshold multiplier was manually set to a value which gave acceptable MUAP event detection during visual inspection of the data, and remained constant through all trials on that channel.
The un-rectified EMG signal was windowed every 25 data points (the approximate duration of two phases of a MUAP). The difference between the minimum and maximum value in the window was calculated to produce a peak-to-peak value. Windows with peak-to-peak values above the channel threshold were identified as windows containing MUAPs. The maximum value in the window was taken as the spike index point. To ensure that the alignment of the windows did not affect MUAP detection, the original EMG signal was windowed again at a half-window offset. The MUAP detection was repeated, and spike time indices were recorded for both windowing steps. Redundant indices were ignored, and indices within 25 data points of each other were compared, with only the spike of greater value kept.
MUAP Accuracy
For data collected during the movement trials, the detected spikes were then classified as occurring either during the movement cue or outside the cue. Because we have observed that there is a delay in both activation and deactivation of motor activity in SCI participants, the one-second period after the cue was included as part of the cue window, giving a realized cue duration of four seconds. The rest period between cues was always as long as or longer than the realized cue duration. The accuracy in a given trial was defined as the number of spikes occurring during the realized movement cue divided by the total number of detected spikes in that trial. An overall channel accuracy was calculated by finding the total number of spikes over all trials for that channel, and determining the percentage that occurred during a movement cue.
Determining Active Channels
Method A - Visual Inspection Rank
A visual inspection of all of the trials for each channel was found to be an effective analysis method. In a manner similar to the ranking system utilized by Calancie16, each collected channel was given a ranking from 1–5, based on the observed patterns of activity. Though the ranking was subjective, guidelines were used to rank the channels, as follows:
No significant activity; baseline noise
Sparse MUAPs detected, as single spikes rather than bursts, but no clear correlation to movement cues.
Bursts of activity detected, but no clear correlation to movement cues.
Bursts of activity, correlated to cues but without precision (several false positives) or without repeatability.
Repeated bursts of visible activity, well correlated within 2–3 cues
Examples of traces that fit each criteria are shown in Figure 1. For subsequent analysis, channels that ranked 4 or 5 were said to be active channels.
Figure 1.
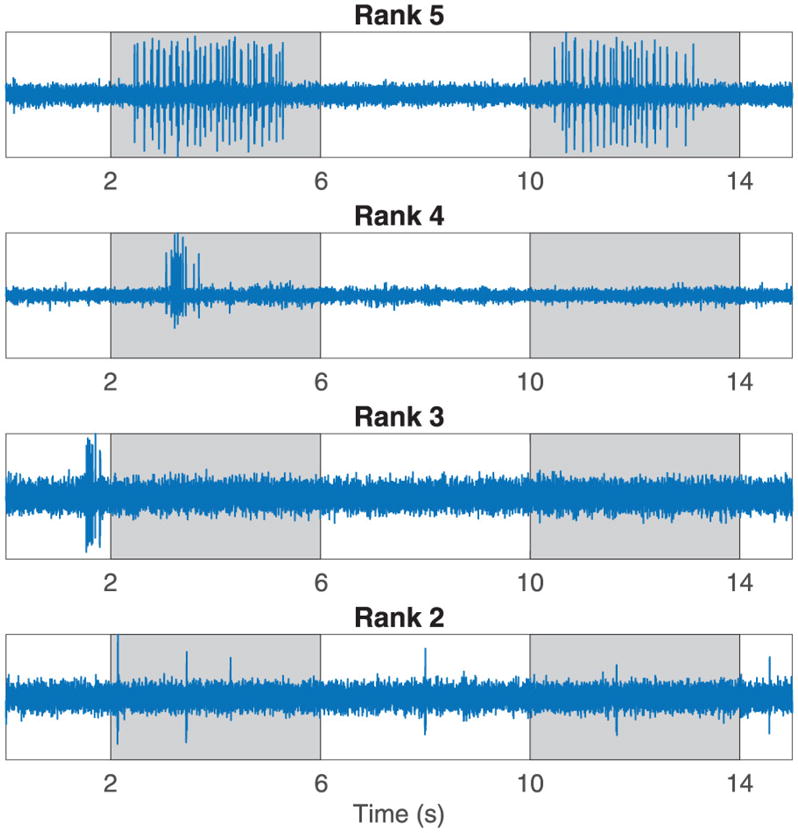
Example EMG trials for visual inspection ranking. Gray boxes indicate movement cue periods.
Method B - Activity Score Algorithm
Due to the time and labor-intensive nature of Method A, an algorithm was developed in order to quickly and automatically identify signals of interest. First, activity bursts (groupings of at least 5 MUAPs within a 1 second period) were identified and for each, it was determined if their onset time occurred within the activity cue period. For each channel, a scoring method was implemented that awarded one point for each trial containing a cued activity onset and either 1) 90% or more of trial activity occurring within cues or 2) at least 25 spikes in the activity burst. Additionally, a point was awarded if, overall: 3) three or more trials contained cued activity onsets. This results in an activity score for each channel; to be classified as having substantial activity, a score of at least one point is required. These criteria were chosen to select muscles that show some degree of volitional control such that they would be eligible for further targeted training.
Muscle Frequency
For both methods, the occurrence of each muscle identified as an active channel was found. If two channels from one muscle were both active, (e.g. both medial and lateral FDB), only one instance was counted in this analysis. Additionally, gastrocnemius and soleus were consolidated into one category.
RESULTS
Active Channels
Figure 2 shows the total count of active channels for each limb of all participants. All but two participants had at least one active channel as identified by the algorithm. Using visual inspection, 24 of 48 limbs (50%), and 16 of 24 participants (67%), had at least one channel ranking 4, including 9 of 16 AIS A participants and 7 of 8 AIS B participants. 5 of 24 participants (21%) had channels with the highest ranking of 5.
Figure 2.
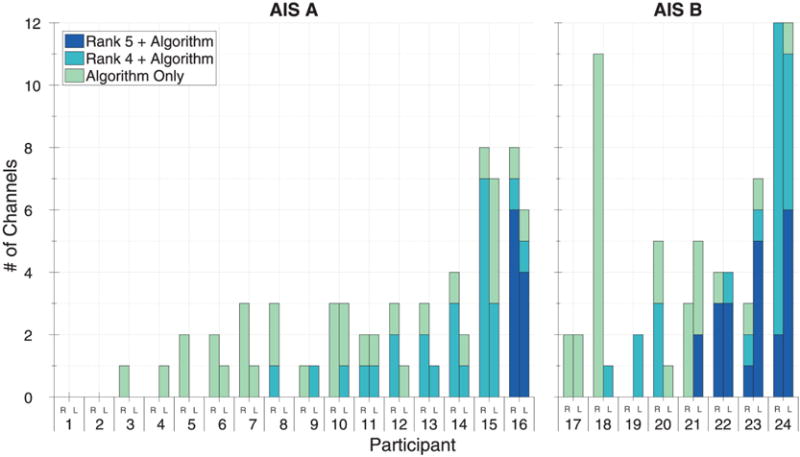
Counts of active channels on each limb by participant, separated by AIS A and B subjects. Channels which ranked a 4 or 5 in the visual inspection analysis (Method A) are shown by the darker bars, and additional channels denoted by the algorithm (Method B) are shown by the lighter bars.
Comparison between Methods
There were 82 total channels that were found to be active (ranked 4–5), through Method A. Method B identified all of these channels as active, plus an additional 61 channels that ranked 3 or lower with Method A. Figure 3 shows a box-and-whiskers plot comparing the rank given by Method A and the algorithm score given by Method B.
Figure 3.
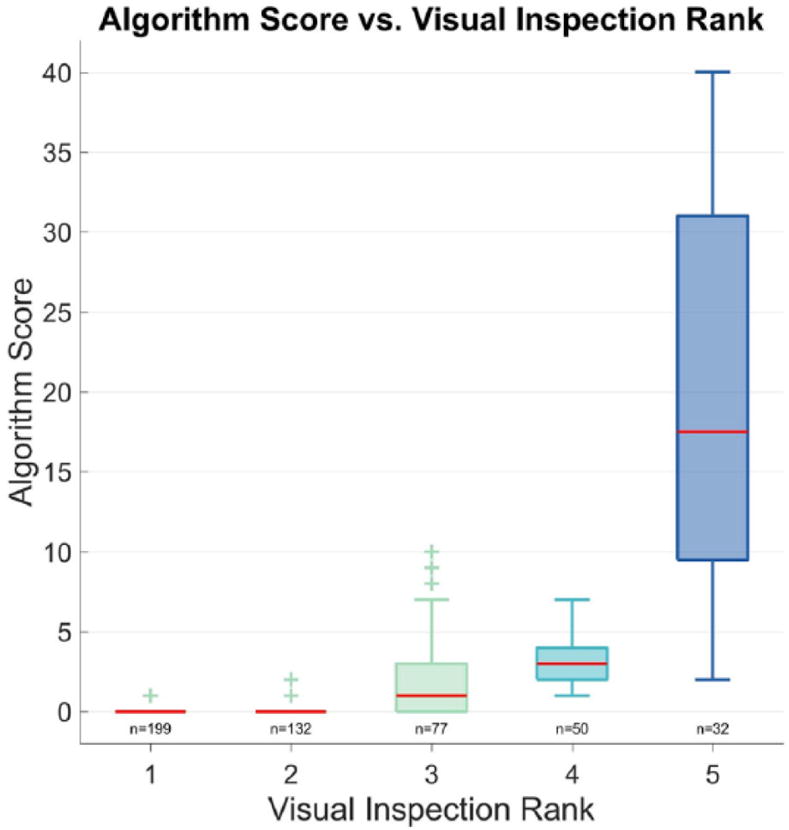
Boxplots showing comparison between visual inspection rank (Method A), and algorithm score (Method B) for all channels.
MUAP detection and accuracy
MUAPs were detected in EMG data for all participants. Figure 4 shows, for each active channel, the MUAP spike counts, given by relative circle area, and overall accuracy to the cue periods for these spikes. This figure gives an overall depiction of the differing levels of information quality present in the EMG activity for these participants. The larger in area and higher in position each circle is, the greater the signal quality is. A large circle with a low position would indicate a channel with a lot of activity but little accuracy, such as a channel with some spontaneously activity. A small circle with a high position may indicate a muscle that fired mainly during the cues, but the subject was not able to sustain that activity and/or had difficulty repeating it.
Figure 4.
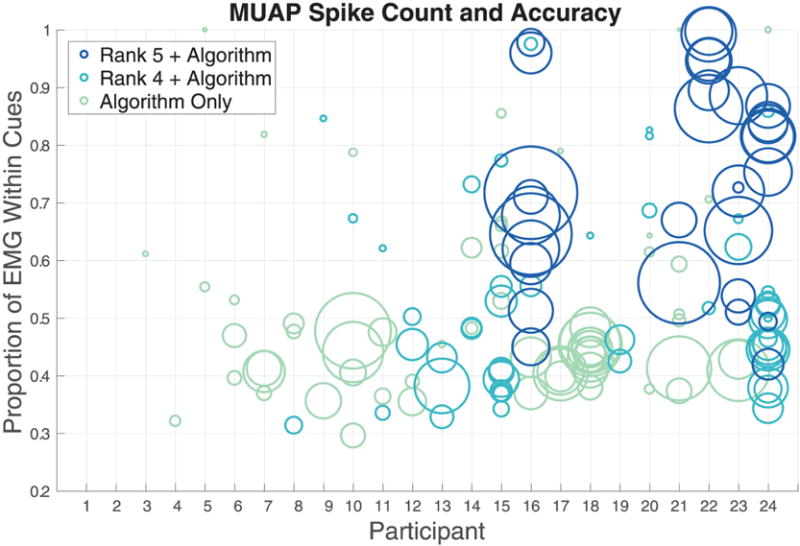
Plots depicting overall spike counts and accuracies of the collected EMG data for each active channel by participant, as depicted on the x-axis. Each circle represents a channel of collected data, over all trials. Circle area represents total number of detected spikes on a channel, such that larger circles correspond to channels with a greater number of detected MUAP spikes. Vertical position of the circles represents overall spike accuracy, or, the overall percentage of detected spikes that occurred within the movement
Muscle Frequency
Muscle frequency for active channels in both Methods is given in Figure 5. There does not appear to be a clear trend in which muscles are most active, though ADM, INT, and EHL are the least common.
Figure 5.
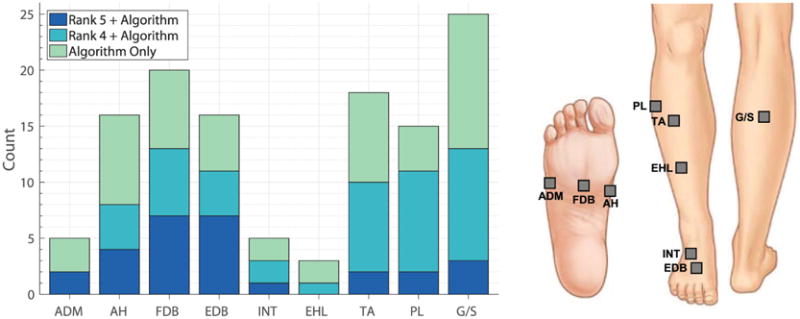
Histogram of muscle occurrence in active channels, along with depiction of general recording location for each of these muscles. Channels which ranked a 5 or 4 in the visual inspection analysis (Method A) are shown by the darker bars, and additional channels denoted by the algorithm (Method B) are shown by the lighter bars.
DISCUSSION
In this work we have shown the existence of volitional motor activity in the lower extremity after motor complete cervical SCI. This agrees with previous studies3–10 showing there is often some degree of continuity across the lesion. For many reasons, classifying these types of signals is not as straightforward as traditional EMG analysis. The nature of the signal includes confounding factors such as spasms or spontaneous activity that could give false positives. Additionally, the signal of interest stems from motor units that participants do not regularly attempt to activate, are unlikely to have proprioceptive feedback, and are likely atrophied. These factors make establishing a cutoff criteria for volitional activity a difficult task. Setting the criteria too strict will cause likely volitional activity to be overlooked, and setting it too loose may mean that noise or spontaneous activity is counted as volitional activity.
Method A was developed so that, through visual inspection, an analyst with experience in myoelectric control can easily classify the potential utility of a particular signal for control purposes. However, this is both subjective to interpretation and very tedious and time-intensive. To address this, Method B was developed to establish quantitative criteria with which the channels of interest could be quickly and automatically identified by a scoring algorithm. Our goal was that the algorithm would identify the same channels as Method A but in a faster and more objective manner in order to provide a more valuable clinical tool. Method A identified channels of interest in 50% of limbs and 67% of participants. Method B identified all signals found by Method A, and though it found many additional signals, Figure 3 shows that visual inspection rank and the score given by the algorithm are well correlated. Thus the activity score given by Method B can be used to quickly identify channels of interest for future training studies.
Because each participant’s data was collected within a single session, and this was the first attempt to collect this type of signal in these subjects, several factors would indicate that the quality of signals collected is the “worst-case scenario.” Since most subjects had not attempted activating these muscles in years, initial attempts likely did not produce optimal activation of any spared descending axons. Depending on the injury, the subjects have limited to no sensation or proprioception in the muscles they are trying to activate, and they had minimal visual feedback of their generated signals during the data collection sessions. Even so, 21% of participants had channels that ranked 5, indicating that even with no training they are likely to contain sufficient information for a neuroprosthetic command signal.
We anticipate that repeated recording sessions with augmented feedback may improve the quality of signals participants are able to produce. Previous studies have shown success in improving muscle activity after SCI using visual biofeedback training17–20. Our next steps will include exploring the effects of long-term biofeedback training on selected below-injury signals with the goal of further improving the signal quality. We hope to determine which types of signals respond best to biofeedback training, and how exactly the training affects the signal properties. Figure 4 shows the number and firing accuracy of detected MUAPs from the channels identified as having significant activity. From this figure, there appear two obvious ways to improve the signal quality - increase the amount of activity and improve the accuracy. With training, we would like to explore if it is possible to increase the activity level of channels with high accuracy but low overall activity, and, conversely, to increase the accuracy of muscles with high activity but low accuracy. Additionally, these future studies will better inform us of the optimal criteria to use during screening, by elucidating which initially evident signal characteristics are most important to be able to train the signal into a viable control signal.
As seen in Figure 5, there does not appear to be a clear trend in which muscles are most active, although ADM, INT, and EHL are the least common. We had predicted that AH would be active more frequently than any of the other muscles, based on work by Calancie,9 but this was not the case. The relatively small study sample size of this study could make any population trends difficult to identify.
As our intention is to use these signals as a novel from of neuroprosthetic control, the study population was limited to cervical level SCI. We would expect lower injuries to show the same or even higher levels of residual activity, as it has previously been shown that in SCI cases without sacral sparing (AIS A), substantial motor preservation is more likely in lumbar injuries than in cervical injuries.21 Because this method is intended as a non-invasive screening tool, the study was limited to surface EMG only. While intramuscular EMG may have given better detail about the properties of recorded motor units, it would provide worse spatial coverage and increased invasiveness. Our use of 8–12 electrode pairs for the entire lower extremity does not give total coverage, such as that of a high-density electrode array, so it is possible additional activity may have been produced but not recorded. Due to set-up time and signal processing requirements, a maximum of 12 channels per limb was chosen as a compromise for a useful screening protocol. Either intramuscular EMG electrodes or a high density electrode matrix would take far more time to set up, such that the clinical utility of those methods as a screening tool would be lessened. A single recording session was done for each participant, but muscle activity in SCI can have daily variation and can be influenced by many factors, such as medication timing. This fact underscores the need for follow-up testing.
Prescreening revealed no visible movement or palpable muscle contraction during volitional attempts in any of the lower extremity muscles, and thus joint movement was not specifically measured during the experimental sessions. In our experiment, we examined the ISNCSCI “key muscles” of the ankle dorsiflexors (TA), ankle plantar flexors (G,S), and long toe extensors (EHL), which all graded “0” in participants’ most recent ISNCSCI evaluations. In addition we tested other muscles below the knee that are not strictly included in the ISNCSCI, including several toe movers (INT, AH, ADM, FDB, EDB) and an ankle everter (PL). In light of the electrophysiological activity found in these below-injury muscles, we suggest that for research applications in SCI treatment and rehabilitation it may prove valuable to augment the ISNCSCI with electrophysiological recordings as a baseline evaluation.
Additionally, the presence of these signals may be important in future SCI therapy and treatments. For example, in acute rehabilitation therapies for SCI, current practice largely ignores muscles below a “complete” injury. By using a more sensitive diagnostic method for spared activity, rehabilitation treatment can be adjusted, and various treatments (electrical stimulation, intensive exercise) could be applied to take advantage of this sparing. A recent study22 showed unprecedented neurological recovery in chronic SCI subjects who underwent intensive BMI-based gait training. These results support the claim that these residual spared tracts are targets for rehabilitative interventions. Identifying and focusing rehabilitation on these muscles in the acute phase, when a higher degree of recovery is more likely, could lead to higher quality volitional signals. Another example includes biologics/regenerative treatments. There is evidence to suggest that it is much easier for biologic treatments to strengthen the spared connections across the lesion than it is to regrow new connections across the injury, due to glial scarring, among other factors.23 Thus, identifying even a very small amount of spared connections could have a large impact in targeting future treatments, and in the long-term goal of a regenerative cure for SCI.
Until recently, the existence of voluntary muscle activity that did not produce functional movement, though interesting scientifically, would have lacked clinical significance. However, with advances in neuroprosthesis and assistive technologies, this phenomenon may have a large clinical impact. Substituting or augmenting traditional NP control methods with below-injury signals could expand the utility of this technology, by giving users the ability to control more functions, or to improve the control of single functions, such as enhancing hand dexterity. The discovery of additional control sources for restorative technology could significantly improve the performance of such technology, and could have a great impact on users’ lives.
CONCLUSIONS
In this work, we have shown that in a majority of cases, below-injury volitional muscle activity is present in chronic, motor complete SCI. By using surface EMG, our methodology is relatively fast, simple, and non-invasive, which would allow its use as a screening tool in a clinical setting. In addition, our signal processing protocol is useful for identifying and classifying signals of interest for further investigation and targeted training studies. SCI is a debilitating injury that severely affects an individuals’ ability to function independently, and thus places a large burden on family, caretakers, and the healthcare system. The below-injury signals described in this work could play a role in increasing function and independence after SCI by integrating them as a control in a neuroprosthetic device or other assistive technology. The potential for the use of these below-injury signals is a very exciting prospect.
Acknowledgments
We would like to thank Dr. Christa Moss and Dr. Dustin Hardwick for their significant contributions to data collection. This work was supported by the National Institutes of Health (NINDS R01-NS-078789, T32-EB04314,) and the National Science Foundation (DGE-0951783).
References
- 1.Spinal cord injury facts and figures at a glance. Natl Spinal Cord Stat Cent. 2012;(1):1–2. doi: 10.1179/1079026813Z.000000000136. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 2.Kirshblum SC, Burns SP, Biering-Sorensen F, et al. International standards for neurological classification of spinal cord injury (revised 2011) J Spinal Cord Med. 2011;34(6):535–546. doi: 10.1179/204577211X13207446293695. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 3.Kakulas BA. Pathology of spinal injuries. Cent Nerv Syst Trauma. 1984;1(2):117–129. doi: 10.1089/cns.1984.1.117. [DOI] [PubMed] [Google Scholar]
- 4.Kakulas Ba. Neuropathology: the foundation for new treatments in spinal cord injury. Spinal Cord. 2004;42(10):549–563. doi: 10.1038/sj.sc.3101670. [DOI] [PubMed] [Google Scholar]
- 5.Bunge RP, Puckett WR, Becerra JL, Marcillo A, Quencer RM. Observations on the pathology of human spinal cord injury. A review and classification of 22 new cases with details from a case of chronic cord compression with extensive focal demyelination. Adv Neurol. 1993;59:75–89. [PubMed] [Google Scholar]
- 6.Kakulas A. The applied neurobiology of human spinal cord injury: a review. Paraplegia. 1988;26(6):371–379. doi: 10.1038/sc.1988.57. [DOI] [PubMed] [Google Scholar]
- 7.Dimitrijevic MR, Faganel J, Lehmkuhl D, Sherwood A. Motor control in man after partial or complete spinal cord injury. Adv Neurol. 1983;39:915–926. [PubMed] [Google Scholar]
- 8.McKay WB, Lim HK, Priebe MM, Stokic DS, Sherwood AM. Clinical neurophysiological assessment of residual motor control in post-spinal cord injury paralysis. Neurorehabil Neural Repair. 2004;18(3):144–153. doi: 10.1177/0888439004267674. [DOI] [PubMed] [Google Scholar]
- 9.Calancie B, Molano MR, Broton JG. Abductor hallucis for monitoring lower-limb recovery after spinal cord injury in man. Spinal Cord. 2004;42(10):573–580. doi: 10.1038/sj.sc.3101640. [DOI] [PubMed] [Google Scholar]
- 10.Sherwood a M, Dimitrijevic MR, McKay WB. Evidence of subclinical brain influence in clinically complete spinal cord injury: discomplete SCI. J Neurol Sci. 1992;110(1–2):90–98. doi: 10.1016/0022-510x(92)90014-c. [DOI] [PubMed] [Google Scholar]
- 11.Thomas CK, Broton JG, Calancie B. Motor unit forces and recruitment patterns after cervical spinal cord injury. Muscle Nerve. 1997;20(2):212–220. doi: 10.1002/(sici)1097-4598(199702)20:2<212::aid-mus12>3.0.co;2-4. [DOI] [PubMed] [Google Scholar]
- 12.Ragnarsson KT. Functional electrical stimulation after spinal cord injury: current use, therapeutic effects and future directions. Spinal Cord. 2008;46(4):255–274. doi: 10.1038/sj.sc.3102091. [DOI] [PubMed] [Google Scholar]
- 13.Kilgore KL, Hoyen Ha, Bryden AM, Hart RL, Keith MW, Peckham PH. An implanted upper-extremity neuroprosthesis using myoelectric control. J Hand Surg Am. 2008;33(4):539–550. doi: 10.1016/j.jhsa.2008.01.007. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 14.Moss CW, Kilgore KL, Peckham PH. A novel command signal for motor neuroprosthetic control. Neurorehabil Neural Repair. 2011;25(9):847–854. doi: 10.1177/1545968311410067. [DOI] [PubMed] [Google Scholar]
- 15.Winslow J, Dididze M, Thomas CK. Automatic classification of motor unit potentials in surface EMG recorded from thenar muscles paralyzed by spinal cord injury. J Neurosci Methods. 2009;185(1):165–177. doi: 10.1016/j.jneumeth.2009.09.012. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Calancie B, Molano MR, Broton JG. EMG for assessing the recovery of voluntary movement after acute spinal cord injury in man. Clin Neurophysiol. 2004;115(8):1748–1759. doi: 10.1016/j.clinph.2004.03.002. [DOI] [PubMed] [Google Scholar]
- 17.Giggins OM, Persson UM, Caulfield B. Biofeedback in rehabilitation. J Neuroeng Rehabil. 2013;10:60. doi: 10.1186/1743-0003-10-60. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 18.Stein RB, Brucker BS, Ayyar DR. Motor units in incomplete spinal cord injury: electrical activity, contractile properties and the effects of biofeedback. J Neurol Neurosurg Psychiatry. 1990;53(10):880–885. doi: 10.1136/jnnp.53.10.880. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 19.Brucker BS, Buylaeva NV. Biofeedback effect on electromyography responses in patients with spinal cord injury. Arch Phys Med Rehabil. 1996;77(2):133–137. doi: 10.1016/s0003-9993(96)90157-4. [DOI] [PubMed] [Google Scholar]
- 20.De Biase MEM, Politti F, Palomari ET, Barros-Filho TEP, De Camargo OP. Increased EMG response following electromyographic biofeedback treatment of rectus femoris muscle after spinal cord injury. Physiotherapy. 2011;97(2):175–179. doi: 10.1016/j.physio.2010.05.005. [DOI] [PubMed] [Google Scholar]
- 21.Zariffa J, Curt A, Steeves JD, et al. Functional Motor Preservation Below the Level of Injury in Subjects With American Spinal Injury Association Impairment Scale Grade A Spinal Cord Injuries. Arch Phys Med Rehabil. 2012;93(5):905–907. doi: 10.1016/j.apmr.2011.10.024. [DOI] [PubMed] [Google Scholar]
- 22.Donati ARC, Shokur S, Morya E, et al. Long-Term Training with a Brain-Machine Interface-Based Gait Protocol Induces Partial Neurological Recovery in Paraplegic Patients. Sci Rep. 2016;6:30383. doi: 10.1038/srep30383. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 23.Lowry N, Goderie SK, Lederman P, et al. The effect of long-term release of Shh from implanted biodegradable microspheres on recovery from spinal cord injury in mice. Biomaterials. 2012;33(10):2892–2901. doi: 10.1016/j.biomaterials.2011.12.048. [DOI] [PubMed] [Google Scholar]