

Abstract
The present study examined the development of anticipatory motor planning in an object manipulation task that has been used to successfully demonstrate motor planning in non-human primates (Weiss et al. in Psychol Sci 18:1063–1068, 2007). Seventy-five participants from four different age groups participated in a cup-manipulation task. One group was preschool children (average age of 5.1 years), two groups were primary school children (7.7 and 9.8 years old respectively) and the final group was comprised of adults. The experimental task entailed reaching for a plastic cup that was vertically suspended in an apparatus in either upright or inverted orientation, removing the cup by its stem and then retrieving a small toy from the inside of the cup. When the cup was inverted in the apparatus, evidence for anticipatory motor planning could be achieved by initially gripping the stem using an inverted (thumb-down) grip posture. We found that when the cup was in upright orientation, all participants reached for the cup using an upright grip (i.e. thumb-up posture). However, when the cup was inverted in the apparatus, only adults consistently used an inverted grasping posture, though the percentage of inverted grips among participants did increase with age. These results suggest a protracted development for anticipatory motor planning abilities in children. Surprisingly, the performance of adults on this task more closely resembles the performance of several nonhuman primate species as opposed to children even at approximately 10 years of age. We discuss how morphological constraints on flexibility may help account for these findings.
Introduction
Planning to grasp an object involves selecting a particular sequence of motor movements from a nearly infinite set of possible movements. For human adults, the selection of motor actions is subject to constraints. These constraints may arise due the affordances of the object itself or as a consequence of the immediate task demands. However, motor planning constraints may also derive from what the actor intends to do next with the object. This anticipatory effect has been termed second-order motor planning (Rosenbaum et al., 1990, for a review see Rosenbaum, Chapman, Weigelt, Weiss, & van der Wel, 2012). A prominent example of such planning can be found in the end-state comfort (ESC) effect, the well-documented demonstration that people tend to organize their motor actions in a way that ensures greater control at the end of the movement (Rosenbaum et al., 1990).
While second-order motor planning has been frequently reported for human adults in a variety of tasks (see Rosenbaum et al., 2012 for review), it only takes hold after a rather protracted developmental trajectory. As discussed below, children less than 10 years of age tend not to exhibit these planning effects as routinely as has been reported for adults (reviewed in Wunsch, Henning, Aschersleben, & Weigelt, 2013). By contrast, studies of non-human primates have reported a tendency for ESC that is similar to that observed for human adults (Chapman, Weiss, & Rosenbaum, 2010; Weiss, Wark, & Rosenbaum, 2007; Zander, Weiss, & Judge, 2013). It is possible that the reason primates appear to perform more like human adults than children do is due to differences between the tasks employed for the development research relative to those employed with primates. Therefore, in this study we attempt to bridge the comparative research with the developmental studies by exploring how children perform on a task that is more analogous to those that have been successfully employed with tamarin monkeys.
While ESC may be pervasive in adults, the data from children suggest that there is a lengthy period of development before this ability is consistently deployed. Several studies have investigated the development of ESC in typically developing children (e.g., Adalbjornsson, Fischman, & Rudisill, 2008; Jongbloed-Pereboom, Nijhuis-Van der Sanden, Saraber-Schiphorst, Crajé, & Steenbergen, 2013; Jovanovic & Schwarzer, 2011; Knudsen, Henning, Wunsch, Weigelt, & Aschersleben, 2012; Manoel & Moreira, 2005; Scharoun & Bryden, 2013; Stöckel, Hughes, & Schack, 2012; Thibaut & Touissant, 2010; Weigelt & Schack, 2010). Studies using a bar-transporttask, in which participants remove a bar from a holder and place it on a target in a particular orientation, have reported that typically developing children show ESC reliably emerging somewhere between 3 and 8 years of age, though performance with adult-like consistency does not tend to emerge prior to 10 years of age (Jovanovic & Schwarzer, 2011; Stöckel et al., 2012; see Rosenbaum et al., 2012; Wunsch et al., 2013 for reviews). Using a task that requires children to turn over a glass and fill it with water has yielded similarly mixed results. Some studies report that children engage in anticipatory planning beginning at 4 years of age (Knudsen et al., 2012), while other studies did not find any sensitivity for anticipatory planning even in 6-year-old children (e.g., Adalbjornsson et al., 2008). It is still an open question why there is such a range in findings, though part of this variance may be explained by task differences, such as variance related to the precision requirements of the tasks, the number of actions steps to be performed, and the familiarity with the task prior to being tested in the lab.
In contrast to the mixed results found with children, the initial study of the ESC effect in primates reported a uniform effect. Weiss et al. (2007) presented cotton-top tamarin monkeys (Saguinus oedipus) with a food reward placed inside of a cup that was suspended in either an upright or an inverted orientation. In the upright trials, all of the subjects took hold of the stem with a canonical thumb-up grasping posture in order to remove it from the apparatus and extract the food reward. However, when the cup was inverted within the apparatus, the tamarins behaved much like human adults do. They reached for the stem using an inverted, thumb-down grasping posture. Despite the lack of any explicit training on this task, the monkeys inhibited their natural grasping tendencies and adopted an unusual grasping posture in order to accommodate the subsequent task demand (of removing the food to eat it). This finding was later replicated with lemurs, the most evolutionarily distant living primates relatives of humans (Chapman et al., 2010). Together, these findings suggest that the second-order motor planning abilities observed in humans have lengthy evolutionary roots and were likely present in the ancestral primate species.
At first blush, then, it is surprising that tamarins, nontool using primate species that diverged from hominids millions of years ago, would perform more similarly to human adults with respect to a motor planning task than do children. As noted above, a possible factor contributing to this discrepancy may be the subtle differences in the task used to test the tamarin monkeys. The experiment entailed grasping a vertically-oriented cup that was subsequently brought toward the body to extract a piece of food. Notably, Adalbjornsson et al. (2008) used the overturned-glasstask, a somewhat similar task to the tamarin task that required children to reach for an inverted glass with one hand and rotate it into an upright orientation in order to pour water from a pitcher into it (held with the same hand). Whereas adults presented with the same task tend to invert their hand and reach for the glass with a thumb-down posture (Fischman, 1997), children up to 8 years of age grasped the glass using an initial thumb-up posture and subsequently ended the action in an awkward position (Adalbjornsson et al., 2008). More recently, a variant of this task was performed with children between 3 and 8 years of age, who had to turn over a glass and place it onto a pod coaster (Knudsen et al., 2012). The authors report that the use of ESC increases from 63 % in 3-year olds to 82 % in 5-year olds, although only the 8-year-old children performed at the same level as adults. The study conducted by Scharoun and Bryden (2013) compared both versions, either to pick up, turn, put on the table, and pour with the same hand (unimanual action), or to pick up, turn, and pour (bimanual action). They found an increase in ESC planning from 10 % in the 3- to 4-year olds up to 50 % of the 7- to 8-year olds, and that children ranging from 9 to 12 years behaved in an adult-like manner in the unimanual trials. A similar pattern emerged in the bimanual trials. Here, an increase from 30 % in the 3- to 4-year olds up to 81 % in the 7- to 8-year olds was found, and 9- to 12-year olds behaved in an adult-like manner. One potentially important characteristic of the overturned-glass-task in the aforementioned studies is that this task tends to be oriented toward an external entity (such as picking up a glass in order to fill it with water). In toddlers, it has been demonstrated that self-directed motor planning tasks may elicit more effective motor planning than externally-oriented tasks, as the consequences of the actions are more obvious to the participants (Claxton, McCarty, & Keen, 2009).
Consequently, in the current experiment we presented three groups of children (ranging in age from 3.7 to 10.5 years) and one group of adults with a cup-manipulation- task that was very similar to the task employed with the tamarins (Weiss et al., 2007). Participants were instructed to reach with their preferred hand to pull a cup out of an apparatus (that restricted the grasps to the stem) and remove a toy from inside. The cup was suspended in either an upright or an inverted orientation. Our dependent variable, consistent with previous studies, was the grasp orientation (thumb-up versus thumb-down) adopted while removing the cup from the apparatus. If the discrepancy in findings between the tamarin study and the previous studies with children relates to the orientation of subsequent actions (i.e., either directed toward an external entity, such as filling a cup with water or, in our case, more self-oriented, such as taking possession of an object), then we anticipated that we should find evidence for reliable second- order planning in some of the children we tested, with perhaps a more precocious trajectory for development than evidenced in previous work. By contrast, if the mechanism underlying the cross-species difference is biomechanical in nature (see “Discussion” and Zander et al., 2013), then we anticipated that our findings would align more closely with other studies of ESC in development (such as Adalbjornsson et al., 2008).
As in previous studies, if participants engaged in second- order motor planning, we assumed they would adopt the less canonical thumb-down initial grasping posture to remove the cup when it was inverted in the apparatus. If the participants did not exhibit second-order motor planning, we expected they would deploy the canonical thumb-up grasping posture, regardless of the cup’s orientation within the apparatus.
Methods
Participants
Seventy-five participants were tested in four age groups. The first group (n = 18) consisted of preschool children recruited from a daycare center in Paderborn (10 girls and 8 boys), whose mean age was 5.1 years (ranging from 3.7 to 6.4 years). Two groups of primary school children were recruited from grades 1–4 from an elementary school in Saarbrücken. The young school children (n = 23) had a mean age of 7.7 years (11 girls and 12 boys, ranging from 6.7 to 8.8 years) and the older school children (n = 19) had a mean age of 9.8 years (8 girls and 11 boys, ranging from 9.1 to 10.5 years). All of the children were righthanded, according to how they threw a ball, used a spoon, and wrote with a pencil (ascertained via questionnaire). For all groups of children, parents provided their informed consent for their child to participate and be recorded during the experiment.
A fourth group of participants consisted of fifteen righthanded university students (adults; 7 women and 8 men), who were recruited from physical education classes at the University of Paderborn. Their mean age was 26.8 years (ranging from 23.8 to 32.3 years). Participation was voluntary with no compensation.1
Apparatus and materials
The apparatus was modeled on the one used by Weiss et al. (2007), though the materials were scaled to size for human participants (Fig. 1a). Participants were presented with a large plastic cup with a wooden handle. The bowl of the cup was 14 cm in diameter and 10 cm deep, and the handle was a wooden cylinder, 13 cm long and 1.5 cm thick. A soft miniature toy (a small stuffed animal) was affixed to the bottom of the cup’s interior with a magnet.
Fig. 1.
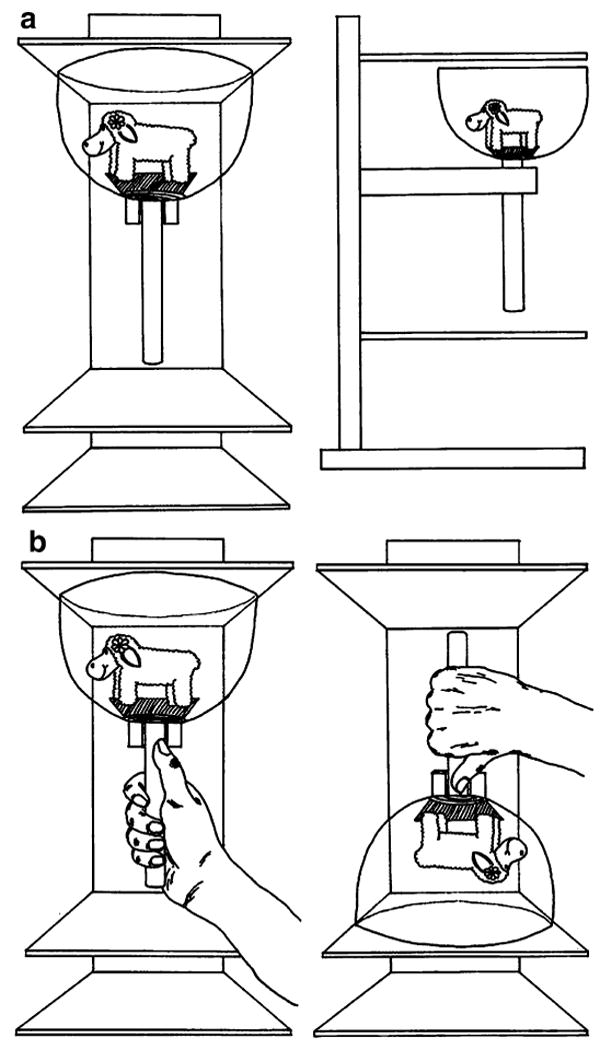
a Depiction of the apparatus (front view and side view), and b expected hand posture while grasping the upright (left picture) or the inverted cup (right picture) to reach end-state comfort
During the testing phase, the cup was suspended from a wooden apparatus (Fig. 1a) that allowed participants to remove it by taking hold of the stem. The cup and the apparatus were placed on a table that aligned the stem of the cup with shoulder height for participants. Seat height was adjusted for smaller school children using pillows on the chair. For the preschool children the table was 43 cm in height, for school children and adults it was set to 75 cm. The cup was well within arm’s reach for all participants. A video camera was placed beside the table and the experiment was recorded in digital format.
Task and procedure
All participants were tested individually, with two experimenters present in the room (excepting several preschoolers for whom a teacher was also present in order for them to be more comfortable). At the start of the experimental session, all participants were familiarized to the cup outside of the apparatus. The cup was placed on top of the table and the participants were asked to lift and inspect it. Subsequently, the experimenter placed the cup into the apparatus by grasping its bowl. Importantly, the experimenter never grasped the cup by its stem, in order to avoid observational learning effects.
During testing, participants were seated in front of the table with the apparatus just within reach and instructed to remove the cup from the apparatus by reaching for its stem with a power grip. They were also instructed to remove the toy with the cup’s opening facing upwards. After accomplishing this task, the participants returned the cup to the experimenter. During each session, one experimenter conducted the experiment, while the other assisted in recording the data.
The experiment consisted of eight trials, four with the cup in upright orientation and four in inverted orientation. The cup’s orientation was changed every two trials and starting position was counterbalanced across participants. The experimenter returned the cup to the apparatus after the participant had taken out the toy animal (without grasping the stem). It is important to note that participants were never constrained in their grasp selection. They were free to reach with either hand for the stem using either an upright (i.e., thumb-up) or inverted (i.e., thumb-down) grip. Typically the entire experiment lasted between 5 and 10 min.
Data analysis
The dependent measure was how participants reached for the cup (upright vs. inverted hand posture, see Fig. 1b). Because each participant’s performance was captured on videotape, it was possible to code grip selection offline. Experimenters coded the initial and final grasping posture, as well as the hand used for each experimental condition. In accordance with Weiss et al. (2007), we considered a second-order motor planning effect to be present if the participants adopted an initially uncomfortable grasping posture in the inverted-cup trials, in order to facilitate the part of the action sequence requiring precision (i.e., removing the toy from the cup). Non-parametric Chi-square tests were used to test for group differences.
The results section is divided into four sub-sections. In the main analysis, group differences were examined using a criterion that defined proficiency with secondorder motor planning as adopting an initially uncomfortable thumb-down grip in more than 50 % of the inverted-cup-trials (i.e., in at least three of the four trials, consistent with Adalbjornsson et al., 2008; Weigelt and Schack, 2010). Next, we analyzed (lateral) differences based on hand selection, using the same criterion for classification. Subsequently, we explored group differences in (a) participants who showed second-order motor planning in at least one of the inverted-cup trials, and in (b) participants who consistently demonstrated the ESC effect in all inverted-cup trials. Finally, we compared children’s performance with the performance of the tamarin monkeys tested in the study by Weiss et al. (2007).
Main analysis
As noted above, in previous studies, participants were considered to have demonstrated second-order motor planning, if they adopted an uncomfortable initial thumbdown grasp in order to turn over the cup, ending in a relatively comfortable position in at least three out of four trials (Adalbjornsson et al., 2008; Weigelt & Schack, 2010). In the upright-cup trials, all participants chose a thumb-up grasping posture, and thus we did not further analyze this data. By contrast, in the inverted-cup trials, none of the preschool children reached ESC according to the aforementioned criterion, while 13 % of the younger school children did, as well as 58 % of the older school children, and 87 % of the adults (cf. Fig. 2). Chi-square analyses revealed significant differences between the groups in grip choice between upright-cup trials and inverted-cup trials (χ2 = 16.791; p < 0.001, df = 3). There was also a significant difference between age groups in grip choice (thumb-up vs. thumb-down) in the invertedcup trials (χ2 = 36.052; p < 0.001, df = 3; see Fig. 2).
Fig. 2.
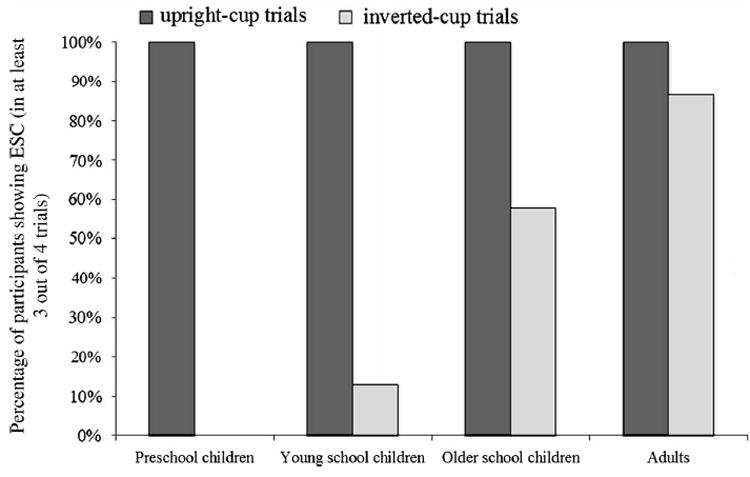
Percentage of participants showing end-state comfort in at least three out of four trials under the upright-cup condition (dark grey bars) and under the inverted-cup condition (light grey bars) as a function of age (preschool children vs. young school children vs. older school children vs. adults)
Hand-specific analyses
Table 1 summarizes the grasping behavior of each group with respect to how participants initially grasped the object (left vs. right hand) and what they did with it next. In the upright-cup trials, all 60 children and all 15 adults adopted a canonical thumb-up grasping posture in at least three out of the four trials (irrespective of the hand used) and therefore were considered to have reached ESC in 100 % of the trials. Between 11 % (older school children) and 17 % (preschool children) of the participants used the left hand to grasp the stem of the cup and extracted the toy with the right hand. Most participants (67 % of the preschool children, 83 % of the younger school children, 89 % of the older school children, and 80 % of adults) used the right hand for the initial grasp in more than 50 % of the trials. Six percent of the preschool children and 11 % of older school children changed the cup from their right into their left hand to extract the toy with the right hand. 17 % of preschool children, 4 % of younger school children, and 20 % of adults used a mixed strategy, using the left and the right hand equally often. In the inverted-cup trials, however, between 8 % in younger school children and 20 % of all adults grasped with their left hand first. Most participants initially grasped with the right hand (between 61 and 84 % of participants in the individual age groups), and the percentage of trials in which participants ended in a comfortable position increased with age (i.e. from 0 to 20 % for participants who mostly used their left hand for the initial grasp and from 0 to 67 % for those who used their right hand). Twenty-two percent of the preschool children and 9 % of the younger school children used a bimanual hand strategy, but also did not show sensitivity for ESC planning.
Table 1.
Percentage of participants who initially grasped the cup’s stem with their right hand, left hand, or equally often with their right and left hand (mixed), who changed hands in-between the action, and who reached end-state comfort when retrieving the toy, as a function of cup orientation (upright vs. inverted) and age group
| Right hand
|
Left hand
|
Mixed
|
|||||||
|---|---|---|---|---|---|---|---|---|---|
| >50 % of all grasps | Hand change right → left | ESC | >50 % of all grasps | Hand change left → right | ESC | 50 % left, 50 % right | Hand changes | ESC | |
| Upright-cup trials | |||||||||
| Preschool children | 66.67 | 5.56 | 100.00 | 16.67 | 0.00 | 100.00 | 16.67 | 0.00 | 100.00 |
| Younger school children | 82.61 | 0.00 | 100.00 | 13.04 | 0.00 | 100.00 | 4.35 | 0.00 | 100.00 |
| Older school children | 89.47 | 10.53 | 100.00 | 10.53 | 0.00 | 100.00 | 0.00 | 0.00 | 100.00 |
| Adults | 80.00 | 0.00 | 100.00 | 0.00 | 0.00 | 100.00 | 20.00 | 0.00 | 100.00 |
| Inverted-cup trials | |||||||||
| Preschool children | 61.11 | 27.78 | 0.00 | 16.67 | 0.00 | 0.00 | 22.22 | 0.00 | 0.00 |
| Younger school children | 82.61 | 17.39 | 8.70 | 8.70 | 0.00 | 4.35 | 8.70 | 0.00 | 0.00 |
| Older school children | 84.21 | 15.79 | 42.11 | 15.79 | 0.00 | 15.79 | 0.00 | 0.00 | 0.00 |
| Adults | 80.00 | 0.00 | 66.67 | 20.00 | 0.00 | 20.00 | 0.00 | 0.00 | 0.00 |
Chi-square tests revealed significant differences between the groups on inverted-cup trials for participants who preferably (i.e. more than 50 % of trials) reached for the cup’s stem with the right hand (χ2 = 24.997, p < 0.001, df = 3), and between the groups for those participants who preferred to initially reach with the left hand (χ2 = 10.370, p < 0.001, df = 3). No such difference was observed for participants who displayed a mixed-hand strategy.
Additional analyses
Figure 3 illustrates the distribution of participants in each group who used a thumb-down grasp in either none, one, two, three or in all four inverted-cup trials. Whereas most of the preschool children did not show second-order motor planning in any trial, most of the young school children showed ESC in one or two trials. The older school children mostly showed ESC planning in three and four trials, and adults showed second-order motor planning predominantly in all four inverted-cup trials. Additional analyses regarding the presence of ESC in at least one trial and across the four trials follow.
Fig. 3.
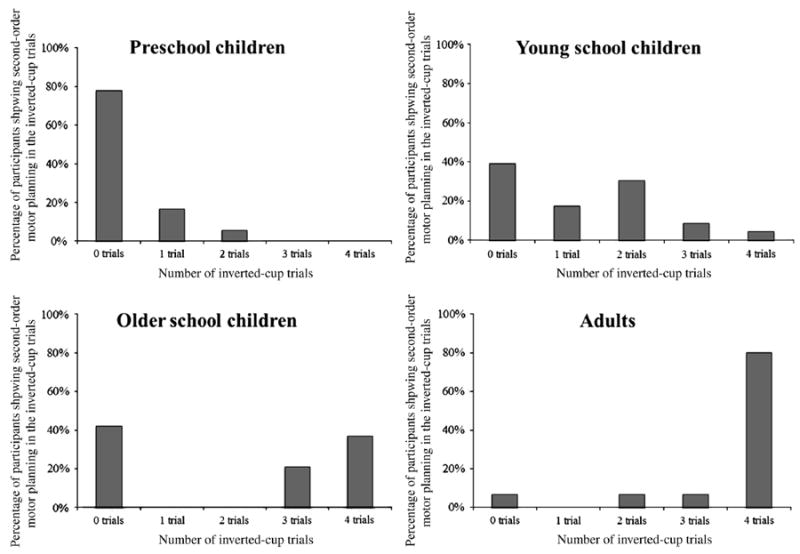
Percentage of participants showing end-state comfort in either none, one, two, three or in all inverted-cup conditions
Observation of second-order motor planning in at least one inverted-cup trial
The aggregate percentage of participants who demonstrated ESC in at least one of the four inverted-cup trials was 22 % in the preschool children, 60 % in the younger school children, 58 % in the older school children, and 93 % in adults. A Chi-square test revealed significant differences between the groups in participants that showed ESC in at least one trial (χ2 = 43.241; p < 0.001, df = 3).
Consistent second-order motor planning across all four inverted-cup trials
None of the children in the preschool children group, 4 % of the younger school children, 37 % of the older school children, and 80 % of the adults showed second-order motor planning in all four inverted-cup trials. A Chisquare analysis again revealed significant differences between the age groups in participants that showed ESC planning in all four inverted-cup trials (χ2 = 35.223; p < 0.001, df = 3).
Evolutionary roots of ESC planning
For our final analysis, we sought to directly compare the performance of the tamarin monkeys observed by Weiss et al. (2007) with the performance of the children in this study. Given the discrepancy in sample sizes and the number of trials in each study (the tamarins had two opportunities to extract the inverted cup, whereas the children in this study had four), we used a z test for proportions for cross-species comparisons. We were interested in comparing individuals who consistently demonstrated end-state comfort and thus, we focused our analyses on individuals who exhibited the effect in every trial. For the inverted cup condition in Weiss et al. (2007), 78 % (7 out of 9) of the monkeys demonstrated ESC as they inverted their grasping posture in all of the test trials. Comparing these results to the adults tested in this study (12 out of 15 or 80 % exhibited ESC on every trial) verifies that performance was similar across these populations (z = −0.13, p = 0.90). Since none of the 18 preschool children consistently demonstrated ESC, they were significantly different from the tamarins (z = 4.35, p < 0.001). In the younger group of school children, 1 out of 23 (4 %) individuals consistently demonstrated ESC, which was also significantly different from the tamarins (z = 4.31, p < 0.001). In the older group of school children, 37 % of all participants (7 out of 19) consistently demonstrated ESC, which was also different from the tamarins (z = 2.02, p = 0.04).
Discussion
The goal of the present study was to investigate secondorder motor planning in children using a methodology that has been successful in demonstrating these effects in tamarin monkeys. Specifically, we used a task that more closely approximated a self-oriented action (i.e., taking possession of an object), as previous studies have demonstrated this type of action may be easier for young children to master relative to externally-oriented actions (Claxton et al., 2009). To this end, we tested one sample of preschool children, two samples of school-aged children differing in age (young school children and older school children), and an adult sample (adults), on a cup-manipulation-task analogous to the one used to demonstrate the ESC effect with cotton-top tamarins (Weiss et al., 2007). A cup was suspended in an apparatus in either upright or inverted orientation and participants had to remove the cup by grasping the stem in order to extract a toy affixed to the inside. The dependent measure was the orientation of the initial grasp. In the inverted-cup condition, we anticipated that those participants who demonstrate second-order motor planning, would grasp the stem using an initially awkward thumb-down grasping posture, in order to facilitate rotation of the cup and extraction of the toy in a more stable (and comfortable) end position. Our results support previous findings indicating that children tend to exhibit this type of planning with greater regularity as they get older. Whereas we found no evidence for the ESC effect in the group of preschool children, it was consistently present (i.e. in at least three out of the four inverted-cup trials) in 13 % of the young school children, and in 58 % of the older school children. By contrast, almost all of the adults (12 out of 15; 80 %) demonstrated the ESC effect, a similar proportion to that observed in the original task with cotton-top tamarins (7 out of 9; 78 %; see Weiss et al., 2007). Thus, the present study reveals a protracted developmental trajectory for ESC. These results also suggest that tamarins appear to behave more like human adults in this task than do young children.
Our findings highlight two important issues. The first is that ESC effects are exhibited in tamarin monkeys, but not in children, in the context of the cup-manipulation-task. This is surprising, because tamarin monkeys (like the ones tested by Weiss et al., 2007) do not use tools in the wild, whereas 6-year-old children are capable of tool use and are quite dexterous. The second issue relates to why ESC, or second-order motor planning more broadly, has such an extended developmental trajectory until adult-like proficiency is achieved. The findings reported in our study are largely consistent with the general pattern reported in previous studies investigating the development of the ESC effect (c.f. Wunsch et al., 2013), although there is some variance in when the effects are first reported. Overall, motor planning abilities appear to take hold very early in development (Claxton, Keen, & McCarty, 2003; McCarty, Clifton, & Collard, 1999) and subsequently undergo a lengthy period of development with ESC not consistently demonstrated even in older children.
It is possible that children’s perception of comfort is different from the perception of comfort in adults. There have been several studies investigating perceived comfort ratings for ESC tasks (e.g., Johnson, 2000; Rosenbaum, Vaughan, Jorgensen, Barnes, & Stewart, 1993; Seegelke, Hughes, & Schack, 2011). In these studies, participants perceived grips at both ends of their supination or pronation range as considerably more awkward than those in the middle of their comfortable ranges of motion. By contrast, only one study has investigated perceived comfort levels in children and compared these to adults (Wilmut & Byrne, 2014). Here, only the ratings of 10- to 12-year-old children were similar to those of adults, suggesting that younger children perceive postures at both ends of their supination or pronation range as less awkward. It must be noted, however, that children may not conceptualize a given rating scale (and thus may not provide their comfort ratings) in the same way as adults do. In any case, the findings from these studies, as well as those reported here, suggest that future research should give greater consideration to the comfort ratings provided by children.
Motor planning across primate species
At first blush, our findings that human children do not exhibit ESC as consistently or often as cotton-top tamarins (Weiss et al., 2007) seem quite counterintuitive. However, it should be noted that despite the growing evidence for second-order motor planning abilities in primates, recent studies have reported variability in performance across species (Zander et al., 2013). While cotton-top tamarins were fairly uniform in exhibiting second-order motor planning in the context of an analogous cup-manipulation-task, other species that have been tested were not quite as consistent. For example, using a very similar cup-manipulation-task, a recent comparative study discovered squirrel monkeys (Saimiri sciureus; low dexterity, non-tool using New World monkeys) are more likely to exhibit the effect than capuchin monkeys (Cebus apella; highly dextrous tool using New World monkeys; see Zander et al., 2013). The authors propose a morphological constraint hypothesis that may provide traction in understanding the differences observed across species, including the children tested in this study.
The morphological constraint hypothesis suggests that species possessing limited manual dexterity may more consistently demonstrate second-order motor planning abilities, because they have fewer means of compensating for an initially suboptimal grip (Zander et al., 2013). Primates, such as tamarins, squirrel monkeys, and lemurs, are restricted in ability to adopt different grasping postures, as they are only capable of using a whole hand “power grip” (Napier, 1960; MacNeilage, 1991). By contrast, the primate species (including capuchin monkeys and human children) that less consistently express ESC in the task used in our experiment are all capable of adopting precision grips in which they can grasp objects between the finger (or fingers) and thumb (Costello & Fragaszy, 1988; Napier, 1960; Spinozzi, Truppa, & Laganà, 2004; Zander et al. 2013).
This pattern of findings is consistent with a feed forward internal model of the extended motor system (see Frey & Povinelli, 2012; Wolpert & Kawato, 1998) that predicts sensory outcomes prior to the execution of motor actions (see Frey & Povinelli, 2012). Accordingly, these computations may be influenced by the morphological constraints of the body. Thus, the consequences for movements that are inconsistent with second-order motor planning may differ across species or even across development, depending on the extent of manual dexterity. For individuals with limiting morphological constraints (with respect to grasping or overall flexibility), the costs of assuming suboptimal postures may be much higher than for species with greater dexterity that are able to compensate for suboptimal initial actions by adjusting their actions later in the sequence. Consequently, it is possible that changes in the amount of joint flexibility during development could contribute to the pattern of results reported here and in previous studies. It may not be coincidental that changes to limbs and limb flexibility associated with puberty may coincide with more consistent demonstrations of end-state comfort. Thus, future empirical work with human children must explore this possible connection between physical flexibility (as it changes across development) and the onset of adult-like second-order motor planning abilities.
Summary
In summary, the present study examined children’s performance in an object manipulation task that was previously used to test tamarin monkeys. Whereas tamarins (Weiss et al., 2007) demonstrated second-order motor planning, the young children in this study did not exhibit this effect with any regularity; consistent with previous studies, only adults reliably showed the ESC effect. Based on intuitions from the comparative literature, we suggest that future studies should focus on the extent to which morphological constraints may underlie some of the observed difference between children and adults.
Acknowledgments
This research was supported by NIH Grant R01 HD067250 (D. J. Weiss) and the German Research Foundation Grant DFG EXC 277 “Cognitive Interaction Technology” (CITEC) (M. Weigelt and T. Schack). The authors thank Roland Pfister for his support on the statistics, the two anonymous reviewers for their comments and suggestions on the manuscript, as well as the editor, Wilfried Kunde, for carefully handling the manuscript.
Footnotes
Separating the children to different groups is an important issue, but it is also very challenging, as many discussions between the authors from Germany and the USA have revealed. In this regard, the age at which children transfer from kindergarten into school becomes important. Because the social context in which children spend their daily life is much different at kindergarten and school, we did not want to include a group in which children of both institutions are mixed. Therefore, it was decided to separate the younger two groups into pre-school and primary school children, taking into account that the age bins are a little larger for these groups. However, the data was also analyzed for 2-year bins, which did not provide any different results. That is, the developmental trajectory of ESC planning was similar when parsing the groups into 2-year bins to the data pattern reported in the results section.
Contributor Information
Kathrin Wunsch, Sportpsychology, Department of Sport and Health, University of Paderborn, Warburger Straße 100, 33098 Paderborn, Germany.
Daniel J. Weiss, Department of Psychology, Pennsylvania State University, State Park, USA
Thomas Schack, Institute of Sport Science, Bielefeld University, Bielefeld, Germany.
Matthias Weigelt, Sportpsychology, Department of Sport and Health, University of Paderborn, Warburger Straße 100, 33098 Paderborn, Germany.
References
- Adalbjornsson CF, Fischman MG, Rudisill ME. The end-state comfort effect in young children. Research Quarterly for Exercise and Sport. 2008;79(1):36–41. doi: 10.5641/193250308X13086753542816. [DOI] [PubMed] [Google Scholar]
- Chapman KM, Weiss DJ, Rosenbaum DA. Evolutionary roots of motor planning: the end-state comfort effect in lemurs. Journal of Comparative Psychology. 2010;124(2):229–232. doi: 10.1037/a0018025. [DOI] [PubMed] [Google Scholar]
- Claxton LJ, Keen R, McCarty ME. Evidence of motor planning in infant reaching behavior. Psychological Science. 2003;14:354–356. doi: 10.1111/1467-9280.24421. [DOI] [PubMed] [Google Scholar]
- Claxton LJ, McCarty ME, Keen R. Self-directed action affects planning in tool-use tasks with toddlers. Infant Behavior and Development. 2009;32:230–233. doi: 10.1016/j.infbeh.2008.12.004. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Costello ME, Fragaszy DM. Prehension in Cebus and Saimiri: I. grip type and hand preference. American Journal of Primatology. 1988;15:235–245. doi: 10.1002/ajp.1350150306. [DOI] [PubMed] [Google Scholar]
- Fischman MG. End-state comfort in object manipulation [Abstract] Research Quarterly for Exercise and Sport. 1997;68((Suppl)):A-60. [Google Scholar]
- Frey SH, Povinelli DJ. Comparative investigations of manual action representations: evidence that chimpanzees represent the cost of potential future actions involving tools. Philosophical Transactions of the Royal Society of Biological Sciences. 2012;367(1585):48–58. doi: 10.1098/rstb.2011.0189. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Johnson SH. Thinking ahead: the case for motor imagery in prospective judgements of prehension. Cognition. 2000;74:33–70. doi: 10.1016/S0010-0277(99)00063-3. [DOI] [PubMed] [Google Scholar]
- Jongbloed-Pereboom M, Nijhuis-Van der Sanden MWG, Saraber-Schiphorst N, Crajé C, Steenbergen B. Anticipatory action planning increases from 3 to 10 years of age in typically developing children. Journal of Experimental Child Psychology. 2013;114:295–305. doi: 10.1016/j.jecp.2012.08.008. [DOI] [PubMed] [Google Scholar]
- Jovanovic B, Schwarzer G. Learning to grasp efficiently: the development of motor planning and the role of observational learning. Vision Research. 2011;51:945–954. doi: 10.1016/j.visres.2010.12.003. [DOI] [PubMed] [Google Scholar]
- Knudsen B, Henning A, Wunsch K, Weigelt M, Aschersleben G. The end-state comfort effect in 3- to 8-year-old children in two object manipulation tasks. Frontiers in Psychology. 2012;3:1–10. doi: 10.3389/fpsyg.2012.00445. [DOI] [PMC free article] [PubMed] [Google Scholar]
- MacNeilage PF. The “postural origins” theory of primate neurobiological asymmetries. In: Krasnegor NA, Rumbaugh DM, Schiefelbusch RL, Studdert-Kennedy M, editors. Biological and behavioral determinants of language development. Hillsdale: Lawrence Erlbaum Associates; 1991. pp. 165–188. [Google Scholar]
- Manoel EJ, Moreira CRP. Planning manipulative hand movements: do young children show the end-state comfort effect? Journal of Human Movement Studies. 2005;49:93–114. [Google Scholar]
- McCarty ME, Clifton RK, Collard RR. Problem solving in infancy: the emergence of an action plan. Journal of Developmental Psychology. 1999;35:1091–1101. doi: 10.1037//0012-1649.35.4.1091. [DOI] [PubMed] [Google Scholar]
- Napier JR. Studies of the hands of living primates. Proceedings of the Zoological Society of London. 1960;134(4):647–657. doi: 10.1111/j.1469-7998.1960.tb05606.x. [DOI] [Google Scholar]
- Rosenbaum DA, Chapman KM, Weigelt M, Weiss DJ, Van der Wel R. Cognition, action, and object manipulation. Psychonomic Bulletin. 2012;138(5):924–946. doi: 10.1037/a0027839. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Rosenbaum DA, Marchak F, Barnes HJ, Vaughan J, Slotta JD, Jorgensen MJ. Constraints for action selection: overhand versus underhand grip. In: Jeannerod M, editor. Attention and performance XIII. Hillsdale: Lawrence Erlbaum Associates; 1990. pp. 321–342. [Google Scholar]
- Rosenbaum DA, Vaughan J, Jorgensen MJ, Barnes HH, Stewart E. Plans for object manipulation. In: Meyer DE, Kornblum S, editors. Attention and performance XIV: Synergies in experimental psychology, artificial intelligence, and cognitive neuroscience. Cambridge: MIT Press; 1993. [Google Scholar]
- Scharoun SM, Bryden PJ. The development of endand beginning-state comfort in a cup manipulation task. Journal of Developmental Psychobiology. 2013 doi: 10.1002/dev.21108. [DOI] [PubMed] [Google Scholar]
- Seegelke C, Hughes CML, Schack T. An investigation into manual asymmetries in grasp behavior and kinematics during and object manipulation task. Experimental Brain Research. 2011;215:65–75. doi: 10.1007/s00221-011-2872-z. [DOI] [PubMed] [Google Scholar]
- Spinozzi G, Truppa V, Laganà T. Grasping behavior in tufted capuchin monkeys (Cebus apella): grip types and manual laterality for picking up a small food item. American Journal of Physical Anthropology. 2004;125:30–41. doi: 10.1002/ajpa.10362. [DOI] [PubMed] [Google Scholar]
- Stöckel T, Hughes CML, Schack T. Representation of grasp postures and anticipatory motor planning in children. Psychological Research. 2012;76(6):768–776. doi: 10.1007/s00426-011-0387-7. [DOI] [PubMed] [Google Scholar]
- Thibaut JP, Touissant L. Developing motor planning over ages. Journal of Experimental Child Psychology. 2010;105(1–2):116–129. doi: 10.1016/j.jecp.2009.10.003. [DOI] [PubMed] [Google Scholar]
- Weigelt M, Schack T. The development of end-state comfort planning in preschool children. Experimental Psychology. 2010;57(1):1–7. doi: 10.1027/1618-3169/a000059. [DOI] [PubMed] [Google Scholar]
- Weiss DJ, Wark JD, Rosenbaum DA. Monkey see, monkey plan, monkey do: the end-state comfort effect in cottontop tamarins. Psychological Science. 2007;18:1063–1068. doi: 10.1111/j.1467-9280.2007.02026.x. [DOI] [PubMed] [Google Scholar]
- Wilmut K, Bryne M. Influences of grasp selection in typically developing children. Acta Psychologica. 2014;148:181–187. doi: 10.1016/j.actpsy.2014.02.005. [DOI] [PubMed] [Google Scholar]
- Wolpert DM, Kawato M. Multiple paired forward and inverse models for motor control. Neural Networks. 1998;11(7–8):1317–1329. doi: 10.1016/s0893-6080(98)00066-5. [DOI] [PubMed] [Google Scholar]
- Wunsch K, Henning A, Aschersleben G, Weigelt M. A systematic review of the end-state comfort effect in normally developing children and in children with developmental disorders. Journal of Motor Learning and Development. 2013;1(3):59–76. [Google Scholar]
- Zander SL, Weiss DJ, Judge PG. The interface between morphology and action planning: a comparison of two species of New World monkeys. Animal Behaviour. 2013;86(6):1251–1258. doi: 10.1016/j.anbehav.2013.09.028. [DOI] [Google Scholar]