

Abstract
In typical movement, humans use a combination of feed-forward and feedback motor control strategies to interact with the world around them. However, when sensory input is impaired or absent, as in the case of various neuropathies or amputation, the ability to perform everyday tasks, like modulating grip force to object weight, can be affected. In this study, we show the results of a preliminary study using a pressure cuff-like force feedback device (CUFF) with the SoftHand Pro (SHP) prosthetic hand. Subjects lifted an object of various weights using their own hand, with the SHP without feedback, and the SHP with force feedback. As expected, significant differences were found between the two SHP conditions and the native hand, but surprisingly not between the SHP conditions. A closer look at the data suggests the feedback may help diminish the overall grip force used during grasping even if it does not alter the grip force modulation to object weight. The lack of significance may be due in part to high intra- and inter-subject variability. Additional training with the CUFF and/or customization of the feedback may enhance the effects and warrants further study.
I. Introduction
It is well known that the human motor control system uses both anticipatory and reactive control to modulate grip force to various object properties, including object weight. Applied grasp force balances energy efficiency with slip prevention, resulting in a grasp force “safety margin” of slightly more than minimum necessary force [1]. It thus follows that when sensory input is impaired or absent, the ability to adequately regulate grasp force can be affected [eg: 2, 3].
Two major types of active upper limb prosthetic technology are in use today: body-powered prostheses wherein body movements, typically of the contralateral shoulder, are translated either into an ‘open’ or ‘close’ signal for the prosthetic hook or hand and myoelectric prostheses, which convert electromyographic (EMG) signals from residual muscles into prosthetic hand movement. There are advantages and disadvantages to each, ranging from better aesthetics and fatigue management with myoelectrics to robust hardware and economy with body-powered devices. However, the sensory feedback provided by body-powered devices is often cited as a functional feature of this type of prosthesis. The tension in the Bowden cable that transmits shoulder movement to the prosthetic hook or hand provides the user with a sense of grasp force that is lost when using a myoelectric prosthesis. Research is currently underway to better understand which channels of information are most important for prosthesis control of grasping and manipulation (eg: grasp force, proprioception, temperature [4, 5]), how many channels could be meaningfully understood by a user without creating a cognitive burden, and the most intuitive ways to deliver sensory information to the user. Grasp force feedback incredibly useful information channel to reduce dependence on visual feedback and improve functional control of a prosthetic terminal device. Non-invasive solutions to feeding back grasp force have been a great focus in the field; examples include vibrotactile, electrocutaneous stimulation, and pressure-based feedback [6, 7, 8].
One method of delivering sensory information is “modality matching,” or producing a sensation in the user similar to the type of information to be transmitted. We previously explored providing grasp force (pressure) information using a pressure cuff-type device [9]. The device has been redesigned to be more robust and accurate [10] and is presented here in a preliminary study of the effect of force feedback on grasp force modulation in prosthetic applications. In the study below, subjects used the Clenching Upper-limb Force Feedback device (CUFF) in combination with the SoftHand Pro (SHP), an anthropomorphic, myoelectrically controlled prosthetic hand, to grasp and lift a sensorized object at various weights.
II. Materials and Methods
A. Study Design
A total of six subjects participated in this study (5 males and 1female, age 24.3 years ± 5.4). The study was approved by the Arizona State University Institutional Review Board, and all subjects gave their written, informed consent prior to the start of the study. Subjects were fitted with the CUFF (described below) on the upper arm and the SHP (described below) was attached to the forearm using an able-bodied adapter (Fig. 1). Subjects were asked to lift an inverted-T object [11] with their native hand, with the SHP, or with the SHP while receiving force feedback through the CUFF. Weight was added to the inverted-T in 100-g increments for a total of 5 weight conditions starting from base (650 g) and reaching 1050 g. Subjects performed each hand condition in a random order and within each hand condition were presented the weights in randomized blocks of 10 lift trials, thus each subject performed a total of 150 object lifts. Minimal instruction was given to avoid interfering with natural motor control: subjects were instructed to lift and briefly hold the sensorized object before replacing it on the table. For each new weight block, subjects were aware that a new weight block was starting but were not aware of the weight or its relation to the previous block (ie: whether it was heavier or lighter).
Figure 1.

Clockwise from top left: the inverted-T sensorized object, the CUFF, and the SoftHand Pro with the forearm adapter.
B. Study Devices: SoftHand Pro, CUFF, Inverted-T
The SoftHand Pro is the prosthetic iteration of the Pisa/IIT SoftHand [12]: an underactuated, synergy-based anthropomorphic robot hand. The prosthetic version is controlled by two surface electromyography (EMG) electrodes (Otto Bock, Germany); hand movement is proportional to muscle activity and holds position when relaxed to minimize user fatigue. The electrodes were placed on bulk wrist/finger flexors and extensors to regulate opening and closing, respectively. Note that we did not target specific muscles. Instead, similar to typical prosthetic fittings, electrode placement was chosen to ensure clear and consistent signals with minimal co-activation. Control settings for each channel were custom-set for each subject. Once fixed, subjects were given roughly 10–15 minutes of practice, or until they felt comfortable in basic operation of the SHP before beginning the grasp trials. Similarly, before beginning the feedback trials, subjects were allowed to feel the effect of feedback to avoid startling the user at the onset of the feedback trials.
The force feedback device CUFF used in this study has been previously presented in [10]. Briefly, the device is comprised of two DC motors attached to a band or cuff worn around the arm. For this study, the motors spin in opposite directions to tighten or loosen the band on the arm in accordance with estimated grasp force. The device is designed, and will be further tested in future, to have the motors spin in the same direction to slide the band around the arm, which could be used as a second feedback channel, e.g., to convey feedback about hand aperture. Because the SHP has no built-in force sensors, an estimation of applied force is made based on the current the motor draws. Briefly, the current the SHP absorbs while moving without obstacles is lower than that required to move following contact with an object. The difference between these two currents (residual current) can thus be exploited to drive the DC motors of the CUFF and provide force feedback. This is because residual current is proportional to grasp force.
The inverted-T object lifted in the study has been previously presented in [11]. For the purposes of this study, the device was equipped with cylindrical grasping surfaces coated in abrasive paper to increase friction. Subjects were instructed to orient their hand (or the SHP) with respect to the device such that the thumb applied force on one half of the cylinder and the fingers on the other. ATI force/torque sensors embedded in each half recorded forces and torques in 6 dimensions throughout each lift. For the present work our analysis focused on the force components normal and tangential (vertical) to the grasp surface, i.e., grip and load force, respectively. The base of the inverted-T was filled with 100–400 g weights in 100-g increments in the center of the base.
C. Data Analysis
For each trial, the load (or tangential) force was used to approximate the phase of the lift and isolate the steady-state grip (or normal) force. This grip force was averaged over at least 500 ms. Of the 10 lifts per condition, the first two were discarded to minimize learning effects and the other 8 were averaged. In the event of grasp failure due to poor positioning of the hand and/or object slippage, the trial was discarded. Extra trials were obtained as needed to ensure a minimum of 5 usable trials for each condition per subject.
Group data was analyzed using a repeated measures analysis of variance (RM-ANOVA). Two factors were considered: Hand and Weight with three and five levels, respectively. Where significant effects were found, Bonferroni-corrected post-hoc tests were conducted.
III. Results
All subjects were able to operate the SoftHand Pro and complete the study. Figure 2 shows a summary of the data averaged across subjects. Both SHP conditions resulted in higher grasp forces across all weight conditions, compared to the native hand conditions. While using the CUFF appeared to result in a reduction of grasp force compared to use of the SHP alone, this difference was not significant, possibly in part due to the large variability in the data.
Figure 2.
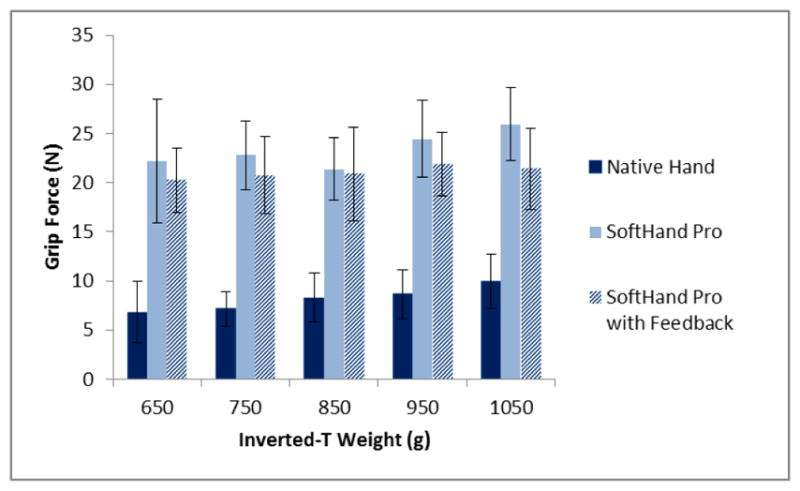
Summary of results averaged across subjects
The RM-ANOVA found a main effect of Hand condition (F=69.423, p<0.001). The Weight condition was found to violate the sphericity assumption (p=0.044, ε =.887), so the Huynh-Feldt correction was applied. A main effect of Weight condition was found (F=4.564, p=0.038). No interaction effect of Hand and Weight conditions was found. Positive main effects were followed by post-hoc analyses with Bonferroni corrections. A significant difference was found between the native hand condition and both SHP and SHP with feedback conditions (p<0.001, p=0.002, respectively). Further, a significant difference was found between the 750 g condition and the 950 and 1050 g conditions (p=0.007 and 0.042, respectively).
IV. Discussion and Conclusions
The hypothesis of this study was that providing force feedback using the CUFF would result in improved grasp force modulation when using the SoftHand Pro. The RM-ANOVA shows a significant difference between each SHP condition and the native hand, as expected, but fails to show a significant difference between the two SHP conditions. The group data suggests an overall reduction in grasp force when using the CUFF compared to SHP use alone potentially along with a flattening of the slope of force modulation to weight. However, this effect does not reach a level of significance. In the future, a larger number of subjects and/or a larger number of trials per subject could be used to mitigate both intra- and inter-subject variability and thus increase the power of the analysis. Further, subjects received only a brief familiarization period with the SHP before testing; it is possible that with additional training with the SHP users could better learn to take advantage of the information provided by the CUFF and even potentially learn SHP control more quickly through the use of feedback
Interestingly, preliminary results do not seem to suggest that force feedback improves grasp force modulation with respect to weight. This is likely because proprioceptive information in the arm already provides the user with load information. (Note: a nerve block or similar strategy could be used to test the effect of the CUFF alone. This was not employed for this study as the CUFF’s eventual application is for use with persons with limb loss, most of whom have intact sensation in the residual limb.) As stated in the introduction, humans tend to apply slightly more than sufficient grasp force to ensure a successful grasp, while maximizing energy efficiency. Typical prosthesis controllers minimize fatigue by maintaining position when the EMG signal relaxes, thus subjects have less intrinsic motivation to minimize their grasp force. Other factors, including that the subject had visual feedback during the task and the inverted-T was rigid and robust may have enhanced this effect.
The human hand has higher sensory resolution than more proximal segments, such as the upper-arm. Thus, it is possible that the difference in CUFF pressure related to varying grasp force to the small weight differences, as used in this study, would be below the minimum detectable difference. Further, the CUFF was not customized to the each user’s sensitivity; the flattening slope mentioned above could be a general response to the pressure from the CUFF. Future work could include customizing the algorithm that converts SHP force to CUFF force to each user’s comfort range and widening the range of weight values used. This modification would ensure that users maximize the CUFF’s benefits without risking discomfort or pain during use. Finally, delays in feedback systems are known to reduce performance. Our current system is estimated to have a delay of 4 ms; this will be more thoroughly examined in future work.
V. Conclusion
This work presents a preliminary evaluation of a novel force feedback device. While results do not indicate a significant effect of using the CUFF compared to using the SoftHand Pro alone, the CUFF was well-tolerated and appears to provide a modest reduction in grasp force. Further study to improve the design and application of the CUFF potentially in combination with longer training may lead to improved results.
Acknowledgments
The authors thank Drs. Qiushi Fu and Giorgio Grioli for their technical assistance as well as the European Research Council and National Institutes of Health for their support.
Research supported in part by the European Research Council under the Advanced Grant SoftHands “A Theory of Soft Synergies for a New Generation of Artificial Hands” no. ERC-291166, by the European Union’s Horizon 2020 Research and Innovation Programme under Grant Agreement “SoftPro: Synergy-based Open-source Foundations and Technologies for Prosthetics and RehabilitatiOn” no.688857, as well as the NICHD of the National Institutes of Health under award number R21HD081938.
Footnotes
The content is solely the responsibility of the authors and does not necessarily represent the official views of the National Institutes of Health.
Contributor Information
Sasha B. Godfrey, Istituto Italiano di Tecnologia, Genoa, Italy.
Matteo Bianchi, Istituto Italiano di Tecnologia, Genoa, Italy. University of Pisa, Italy.
Antonio Bicchi, Istituto Italiano di Tecnologia, Genoa, Italy. University of Pisa, Italy.
Marco Santello, Arizona State University, USA.
References
- 1.Johansson RS, Westling G. Roles of glabrous skin receptors and sensorimotor memory in automatic control or precision grip when lilting rougher or more slippery objects. Exp Brain Res. 1984;56:550–564. doi: 10.1007/BF00237997. [DOI] [PubMed] [Google Scholar]
- 2.Quaney BM, Perera S, Maletsky R, Luchies CW, Nudo RJ. Impaired grip force modulation in the ipsilesional hand after unilateral middle cerebral artery stroke. Neurorehabilitation and Neural Repair. 2005;19(4):338–349. doi: 10.1177/1545968305282269. [DOI] [PubMed] [Google Scholar]
- 3.Nowak DA, Hermsdörfer J. Grip force behavior during object manipulation in neurological disorders: toward an objective evaluation of manual performance deficits. Movement disorders. 2005;20(1):11–25. doi: 10.1002/mds.20299. [DOI] [PubMed] [Google Scholar]
- 4.Schofield JS, Evans KR, Carey JP, Hebert JS. Applications of sensory feedback in motorized upper extremity prosthesis: a review. Expert review of medical devices. 2014;11(5):499–511. doi: 10.1586/17434440.2014.929496. [DOI] [PubMed] [Google Scholar]
- 5.Nghiem BT, Sando IC, Gillespie RB, McLaughlin BL, Gerling GJ, Langhals NB, Urbanchek MG, Cederna PS. Providing a Sense of Touch to Prosthetic Hands. Plastic and reconstructive surgery. 2015;135(6):1652–1663. doi: 10.1097/PRS.0000000000001289. [DOI] [PubMed] [Google Scholar]
- 6.Stepp CE, An Q, Matsuoka Y. Repeated training with augmentative vibrotactile feedback increases object manipulation performance. PloS one. 2012;7(2):e32743. doi: 10.1371/journal.pone.0032743. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 7.Zafar M, Van Doren CL. Effectiveness of supplemental grasp-force feedback in the presence of vision. Medical and Biological Engineering and Computing. 2000;38(3):267–274. doi: 10.1007/BF02347046. [DOI] [PubMed] [Google Scholar]
- 8.Meek S, Jacobsen S, Goulding P. Extended physiologic taction: Design and evaluation of a proportional force feedback. J Rehabil Res Dev. 1989;26(3):53–62. [PubMed] [Google Scholar]
- 9.Ajoudani A, Godfrey SB, Bianchi M, Catalano MG, Grioli G, Tsagarakis N, Bicchi A. Exploring teleimpedance and tactile feedback for intuitive control of the pisa/iit softhand. Haptics. IEEE Transactions on. 2014;7(2):203–215. doi: 10.1109/TOH.2014.2309142. [DOI] [PubMed] [Google Scholar]
- 10.Casini S, Morvidoni M, Bianchi M, Catalano M, Grioli G, Bicchi A. Design and realization of the CUFF-clenching upper-limb force feedback wearable device for distributed mechano-tactile stimulation of normal and tangential skin forces. Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on; IEEE; 2015. Sep, pp. 1186–1193. [Google Scholar]
- 11.Fu Q, Zhang W, Santello M. Anticipatory planning and control of grasp positions and forces for dexterous two-digit manipulation. Journal of Neuroscience. 2010;30:9117–9126. doi: 10.1523/JNEUROSCI.4159-09.2010. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 12.Catalano MG, Grioli G, Farnioli E, Serio A, Piazza C, Bicchi A. Adaptive synergies for the design and control of the Pisa/IIT SoftHand. The International Journal of Robotics Research. 2014;33(5):768–782. [Google Scholar]