

Abstract
We tested science operations strategies developed for use in remote mobile spacecraft missions, to determine whether reconnoitering a site of potential habitability prior to in-depth study (a walkabout-first strategy) can be a more efficient use of time and resources than the linear approach commonly used by planetary rover missions. Two field teams studied a sedimentary sequence in Utah to assess habitability potential. At each site one team commanded a human “rover” to execute observations and conducted data analysis and made follow-on decisions based solely on those observations. Another team followed the same traverse using traditional terrestrial field methods, and the results of the two teams were compared. Test results indicate that for a mission with goals similar to our field case, the walkabout-first strategy may save time and other mission resources, while improving science return. The approach enabled more informed choices and higher team confidence in choosing where to spend time and other consumable resources. The walkabout strategy may prove most efficient when many close sites must be triaged to a smaller subset for detailed study or sampling. This situation would arise when mission goals include finding, identifying, characterizing or sampling a specific material, feature or type of environment within a certain area.
Keywords: MER, Science operations, Rover, Analog field test
1. Introduction
The approaches used to robotically explore planetary field sites are an outgrowth of geologic fieldwork on Earth. Scientists must determine how best to adapt generalized field methods to the constraints specific to robotic exploration. Decisions common to both terrestrial and extraterrestrial fieldwork include the choice of field site; which locations at that field site will be explored in depth; which tools will be used at each location; and how much data from each location is sufficient to address the hypotheses driving the fieldwork. These decisions evolve as field work progresses and the data gathered allows initial hypotheses to be refined, refuted or confirmed.
The science backroom protocols currently in use for the Mars Exploration Rovers (MERs) [1] are based on terrestrial fieldwork methods and now provide the framework for many operational decisions made by the scientists using the rovers for fieldwork. The science operations strategies for Phoenix [2] and the Mars Science Laboratory (MSL) [3] were developed from the MER operations blueprint, but were adapted to meet the unique goals and capabilities of each mission.
For each of these missions, the science team decisions feed into all other systems. Thus, in the same way hardware is tested, science team operational procedures must be designed and tested to develop new capabilities, improve performance by removing or mitigating tension points, and increase efficiencies. One of the central tensions in any mission is deployment and use of resources that are limited (consumables) or time-intensive to utilize. Such resources include engineering resources (e.g., wheels), science resources (e.g., drill bits, sample canisters) and human resources (time and decision-making). The specific instruments that fall into this category differ for each spacecraft; for the MER rover, the primary science-controlled consumables are those used for contact science, where the rover must stop forward progress to interrogate targets using a suite of arm-mounted instruments. Thus, a point of considerable debate on the MER science team was, and continues to be, the competing philosophies of frequent contact science versus maximum ground covered: How often should the science team stop to do contact science, and what is the optimum balance of driving versus contact science that will yield the maximum high-fidelity science return?
At one extreme, scientists commonly employ a linear approach in rover fieldwork, where the rover does not backtrack, but examines all sites in the order they are encountered. This approach covers the most new ground in the least amount of time, which testing has shown can in some cases strengthen understanding of geologic context [4,5] and may increase chances of identifying unusual targets of interest (e.g., meteorites). Examples of this approach include the investigations of Columbia Hills and Home Plate by Spirit (e.g. [6]), Endurance Crater at the Opportunity landing site [7], and the Kimberley by MSL [8]. However, most terrestrial geologists employ a style of reconnaissance where they first “walk” the field site to gain context and prioritize targets, and follow with detailed examination of a subset of high-value targets (“walkabout-first”). There are two examples of this mode on Mars: Opportunity’s examination of Whitewater Lake [9] and MSL Curiosity’s investigation of the Pahrump Hills region [3]. The walk-about approach may in some cases be a more efficient use of time and consumable resources, compared with the linear approach, where significant resources may be spent on less relevant targets before reaching more relevant ones.
The test reported here is part of the GeoHeuristic Operational Strategies Testing (GHOST) project; it builds on knowledge gained from using MER-derived semi-autonomous rover science operations strategies to determine best practices suitable for remote semi-autonomous lunar rover geology [4,5]. In this field test, we apply these lessons back to Mars by investigating how efficient the walkabout-first approach is in utilizing resources to meet science goals as applied to a Mars analog environment and a reconnaissance-style mission such as MER. Our starting hypothesis was that employing the walkabout-first strategy would both save mission resources and improve science return when pursuing a focused science objective.
2. Approach
Experience in developing, testing and utilizing rover-driven geologic field methodology has consisted primarily of practical roving activity (the Lunakhod, MER and MSL rovers) and terrestrial analog simulations. Analog field tests have included developing methodologies [4,5,10,12–14], mobile simulations of geologic fieldwork [11,15–20]; testing potential instrumentation and robotics [21–24], assessing operator performance and science return under teleoperation conditions [14,25–27], and studying science team interaction during simulated operations [28–31]. A common strategy has been to use a rover mock-up armed with a mission-specific suite of instruments, with an engineering team in the field and a “science backroom” off-site using incoming data to make science-based decisions for forward mission planning. The bulk of these studies have focused mainly on testing equipment and only secondarily on the efficacy of the science-driven field methodology.
However, it is not the mission-specific hardware, but the resulting data that scientists require to make operations decisions. Thus, the decision-making protocols that scientists use to gather data (drive or stay; gather in situ geochemical data or take more images; take a sample or move on) require no specialized equipment to be functionally similar to rover work and may be tested without using flight-ready instruments or specialized sampling equipment (Fig. 1). GHOST has successfully used a generalized suite of instruments yielding imaging, mineralogy, and geochemical data (described in more detail in Section 4.1) to provide information similar to flight instruments, with humans to provide mobility, commanded as a remote asset. In this way, results are more generally applicable to understanding methodologies and protocols, rather than being hardware-specific. This method of field work also removes variables that often undercut testing activities, including faulty instrument performance in an unfamiliar environment, hardware failure or changes in hardware availability, and spotty communications.
Fig. 1.
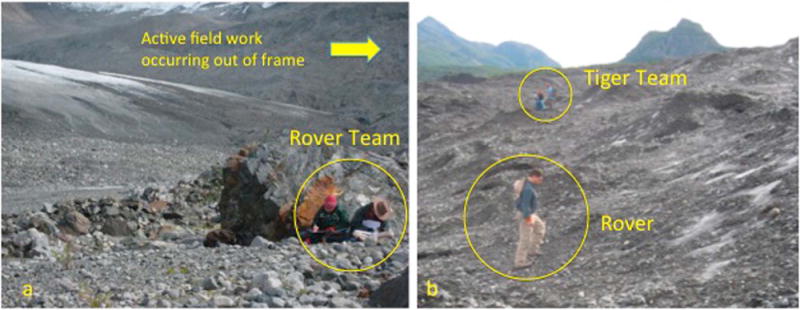
What roverless roving looks like. (a) Rover Team (i.e. science team), stationed out of view of the area of active fieldwork; (b) Rover (field assistant) moving to acquire a 3×1 mosaic (3 images mimicking an observation for situational awareness and geologic assessment at the end of a drive); Tiger Team is in the distance, conducting traditional fieldwork along the path planned for the rover by the Rover Team. These images were acquired by the Site Expert monitoring a field campaign investigating a lunar regolith analog [5].
3. Field site
In line with the current goals of the NASA Mars Exploration program [32], we chose a Mars analog site with signatures of potential past habitability (e.g., an inland sea) possibly detectable from orbit and in situ measurements. Our field site was located on the eastern side of the San Rafael Swell, on Bureau of Land Management land south of Green River, Utah. In this region, Triassic through Cretaceous sedimentary units were deposited during transgressive-regressive events associated with the great inland sea that existed in the southwestern United States. This resulted in intermingled deposits formed from subaqueous (deep and shallow carbonates, shale units, sandstones) and subaerial (sandstone ergs, fluvial conglomerates) processes. These mudstones, siltstones, sandstones, and conglomerates were deposited in eolian, fluvial/coastal, and marine settings and are akin to the types of lithologies and inferred depositional environments examined by the Curiosity rover in Gale crater (fluvio-lacustrine, eolian) and the Opportunity rover at Meridiani planum (sabkha, eolian, fluvial). Diagenetic features from groundwater flow through the porous rocks are abundant in the San Rafael Group and include hematite concretions and gypsum veins, analogous to those observed at Meridiani planum and Gale crater (e.g. [9,33,34]).
Our field site (38.883°N, 110.450°W) represented a westward transect through the progressively older Jurassic-aged Curtis, Entrada, Carmel, Navajo, and Kayenta Formations [35]. At our locale, the Curtis Formation is a greenish-gray cross-bedded and ripple laminated fine-grained sandstone deposited in a transgressive marine setting with occasional molluscan fossils. The Entrada sandstone in this region consists of fine- to medium-sized sands with parallel facies interbedded with siltstones and is also representative of a water-laid deposit, although with significant eolian input. The underlying Carmel Formation contains a variety of lithologies including limestone, calcareous shales, conglomeratic sandstones, siltstones, and gypsum beds that represent deposition in shallow marine, coastal, fluvial, and sabkha settings. Making up the eastern face of the San Rafael Swell, the Navajo Sandstone represents eolian deposition with large-scale trough cross stratification (duneforms) present. The westernmost and oldest unit studied was the Kayenta Sandstone, characterized by sands and silts reworked in a fluvial environment with occasional fine-scale cross-bedding. Compressional forces associated with the Laramide Orogeny uplifted and exposed this diverse geologic history, creating a 300 m-relief monocline with thrust faults at depth [36]. Subsequent fluvial erosion incised canyons through the structure, providing exquisite exposure of the flat-lying to steeply-dipping stratigraphic units.
4. Methodology
The objective in designing our field methodology was to provide a high-fidelity test to assess, and quantify where possible, the tradeoffs involved in using various science operations protocols in rover-driven field work. We thus strove to mimic as much as possible the operations architecture of a roving Mars mission. In prior tests we used an architecture based on the MER model, and we adopted that architecture for this test as well, for ease of comparison. However, in Section 7.3 we outline how our results could be applied to an MSL-class mission.
MER tactical science decisions are made on an approximately 24 h cycle; while the previous day’s plan is executing on Mars, the science team on Earth is planning activities for the next 1–4 martian days. The science team is responsible for making the decisions about what science observations will best meet the science goals. This decision-making process occurs both strategically (what should we accomplish in the next few months?) and tactically (what must we do today to further that longer-term plan?). The long-term plan is developed ahead of time using orbital data and long-range, ground-based remote sensing data. However, that plan can be altered by the science team, as hypotheses are developed and refined using local in situ data as it arrives on Earth. This long-term plan denotes a notional traverse for the rover to follow, as well as locations that are judged of high scientific interest where the rover is expected to stop for more in-depth data acquisition. For a detailed description of the nominal MER science operations scenario, see [1].
For this field test, our science team was responsible for commanding the data-collecting activities of the rover, and processing and analyzing that data as it was returned. They developed a notional science traverse and chose locations for in-depth analysis based on orbital data, but incoming in situ data informed and drove alterations to that plan. The science team evaluated data as it was downloaded from the “rover,” and then provided a new set of data acquisition instructions based on the original long-term plan but informed by the data previously downloaded.
For this architecture, the key points to maintain test fidelity were: (1) the science team must receive data of similar type, quantity and quality as the MER team would; (2) that data must be available only at the same cadence as would be the case for MER; and (3) all results must be compared to a baseline set of observations and interpretations acquired using traditional field methods, to highlight qualitatively (and quantitatively where possible) the merits of tested operational protocols in maximizing science return. To meet the first constraint, we chose portable, off-the-shelf instruments that would provide data comparable to what the current MER instruments yield. To meet the second constraint, we designed our field protocols to allow us to quantitatively estimate the number of planning cycles required to accomplish each set of observations conducted. To meet the third, we ran a concurrent interrogation of the field site by a subset of our science team, to produce a standard set of observations and results to which we could compare our MER-inspired observations and results. We describe these points in detail below.
4.1. Instruments
For MER, tactically-relevant data are defined as data that can be calibrated, refined and interpreted in time to be used for planning the next immediate sol or sols. For sols when the rover focuses on remote sensing (gathering data from a distance using mast-mounted instruments), such data include multispectral images at a range of resolutions starting from ~0.4 mm/pixel [37]; and mineralogical data in the form of infrared spectrometry (wavelength range 5 – 29 μm) [Christensen et al., 2003]. On contact science sols (resource-intensive martian days when the rover uses instruments that come into contact or near-contact with the surface), tactically available data also include black-and-white images at 31 μm/pixel from the Microscopic Imager (MI) [38] and elemental data from the APXS [39]. Thus, instruments for the GHOST field test were required to provide to the science team visual and compositional data for remote sensing sols, and hand-lens scale images and coarse elemental data for contact science sols.
Instruments used in this field test are summarized in Table 1. Images were acquired by an SLR digital camera. The range of resolutions available with the mast-mounted Pancam (as well as the MSL Mastcam [40]) was mimicked by acquiring images from infinity to about 1.5 m distance. A working distance from the front of the lens to the target of ~15 cm yielded 24×36 mm2 images at ~10 μm/pixel; these parameters are within the range of the MSL MArs HandLens Imager (MAHLI) [41]. To mimic the acquisition of basic mineralogical and geochemical data, we utilized a portable Terra X-ray diffraction/X-ray fluorescence (XRD/XRF) instrument, which is briefcase-sized and weighs just over 20 kg, making it field portable. The instrument uses a CuKα radiation source, and a sample run requires a few minutes for a monomineralic sample or up to an hour for a complex or poorly crystalline one, thus yielding tactically-relevant compositional results. MER Pancam, Mini-TES and MSL ChemCam data all acquire gross mineralogy data, though the methods used differ for each instrument. While the data provided by the portable XRD was not identical to these geochemical instruments, it was sufficient to meet the goal of providing basic mineralogy data in a field setting (e.g., informing the team if the target rock contains various minerals). Data from the XRD was degraded to Mini-TES-type data in the sense that the data provided to the rover team consisted only of qualitative mineralogy at outcrop scale. Only when the team chose to simulate use of the APXS or ChemCam was elemental data provided. In these cases, quantitative mineralogy from XRD was reduced to elemental abundances expressed as weight percent oxides and only that information was provided to the rover team.
Table 1.
Instruments used in field work.
| Instrument | Specifications | Data provided | Use | Data type similar to… |
|---|---|---|---|---|
| SLR digital camera | focus ~1.5 cm to infinity; FOV 34×23 mm@ best res. | Context imaging at m to cm-scale Fine-scale imaging at mm- to μm-scale |
Remote Sensing Contact Science |
MER Pancam; MSL Mastcam MER MI; MSL MAHLI |
| XRD/XRF | CoKα | Mineralogy, derived elemental chemistry | Remote Sensing Contact Science |
MER Pancam, Mini-TES; MSL ChemCam MER/MSL APXS; MSL CheMin |
Along with being highly portable, the XRD instrument has the advantage of requiring only a minor amount of sample for analysis (~ 1 g), so we were able to measure thin coatings and, in some cases, individual crystals. We considered a mineral positively identified when a pattern matched all strong and moderate diffraction lines on the appropriate American Society for Testing and Materials cards. We used XPowder software for pattern matching and quantitative analysis along with the “difdata” library from the American Mineralogist Crystal Structure Database for phase identification, which we customized to include additional sulfate phases. We analyzed diffractograms from 5° to 55° in 2-theta space. Additional details regarding field use of the XRD are in [42].
4.2. Cadence of data acquisition and analysis
The general data acquisition strategy for MER follows that reported by Squyres et al. [2003], with adaptations as circumstances require. A set of images covering an entire location at a single elevation (a 360° panorama) is commonly acquired from which targets are chosen for in-depth interrogation, including contact science where it is determined that spending those resources maximizes science return. Each target is imaged at outcrop-scale (using one or more color or spectral filters [37]) and mineralogical data is acquired (by the MTES, which was used until 2007 [43])) to place the target of interest into geological context. Targets within each contextual image are then chosen based on science goals, and examined by one or more of the contact science instruments. Each sol’s plan typically contains one or more observations from one or more of these instruments.
A MER operational planning cycle is defined as the period of time in which an entire sol’s worth of activities is planned for the rover. Due to constraints of time, power, and data volume, only a limited number or type of science activities may fit into a plan, with the bulk of the plan being taken up by necessary engineering activities. For example, a typical single sol plan for the MER Opportunity rover might include a drive to a certain location and a 360° image panorama of the area; or a very short drive (bump) to a contact science location followed by imaging of the potential contact science target; or contact science using the instruments mounted on the arm: the MI, APXS and RAT. For this field test, any similar set of data products that might reasonably be acquired by a fully-functioning, well-powered MER-class rover in a single sol were recorded as one sol’s worth of rover activities. To simulate rover operations, the Rover Team was not allowed access to any data other than that from the current or previous sols; additionally, Rover Team members were blocked by surrounding terrain from viewing the traverse site.
4.3. Provision of baseline observations and results
Our method for acquiring a set of baseline observations was similar to that used in previous GHOST field tests [4,5]. We divided our science team into a two-person Rover Team, a two-person Tiger Team, a field Site Expert, and a field assistant. The Rover Team conducted science operations using MER-inspired methods, which were then executed by a human “rover” field assistant, equipped with instruments described in Section 4.1 and listed in Table 1. The Tiger Team conducted the same traverse as the rover, but interrogated the site using traditional geologic field methods (e.g., walking reconnaissance, handlens observation and analysis). The results of the Tiger Team provided the baseline science results against which the Rover Team observations, results and interpretations could be compared. The Site Expert, not part of the Rover or Tiger Teams, reconnoitered locations prior to fieldwork, provided orbital data to the rest of the science team from which the initial notional traverse was planned, and accompanied the Rover and Tiger Teams to the field to ensure the data was collected by the rover as commanded by the Rover Team, and that this data was the only information provided to, or used by, the Rover Team. The Site Expert did not participate in data analysis or interpretation. This person was therefore familiar with the local geology but did not influence either team. Roles of each team member are described in Table 2.
Table 2.
Team member roles and responsibilities.
| Role | Members | Responsibilities | Role similar to MER role |
|---|---|---|---|
| Science Team | All project team members except for Site Expert | Assesses field site using orbital data; determines notional rover traverse and science stops | MER Science Team (Science Operations Working Group) |
| Rover Team | Two science team members unfamiliar with field site | Interrogates site geology using MER-constrained protocols | MER Science Team on tactical shift for that planning cycle |
| Tiger Team | Two science team members unfamiliar with field site | Interrogate site geology using terrestrial field approach | No similar role |
| Site Expert | One science team member familiar with field site | Expert on site geology; prepares orbital data for team analysis | No similar role |
| Rovers | Field assistant | Executes observations as commanded by Rover Team | Opportunity rover |
5. Field test
5.1. Pre-field observations and planning
Prior to fieldwork, the science team assessed the field site, following the same protocol commonly used by the MER science team in making long-term plans to meet science goals: (1) Assess the site for traversability and science merit using orbital data; (2) determine the rover traverse path; and (3) along that path choose sites of high scientific interest as potential places where the rover may stop and use geochemical and imaging contact instruments. This field site was chosen as one that potentially preserved clues of prior habitability; thus, the overarching science goal of the science team was to identify and characterize prior habitable environments. The Site Expert provided the field teams with orbital data mimicking datasets that would plausibly be available to a science team pre-landing; these are shown in Fig. 2. Mars Reconnaissance Orbiter (MRO) data was our standard in terms of coverage, data type and resolution (e.g., Context Camera [CTX] resolution visible-wavelength images, Compact Reconnaissance Imaging Spectrometer for Mars [CRISM] spectroscopic images). We utilized othrorectified panchromatic 1 m/pixel images of the site from the Utah Geologic Survey to simulate color images from the High-Resolution Imaging Science Experiment (HiRISE). These data were also degraded to 6 m/pixel and greyscale to match CTX spatial resolution over the broader geographic region. For elevation data, we used a USGS 30 m/pixel digital elevation model (DEM) degraded to 75 m/pixel over the broader region to simulate the digital terrain models (DTMs) from the High Resolution Stereo Camera (HRSC). Additionally, a Utah Geologic Survey 5 m/pixel spatial resolution DEM was utilized to create a DTM roughly equivalent in spatial resolution to HiRISE DTMs derived from stereo pairs. Landsat 7 Thematic Mapper multispectral data was used to simulate CRISM data. This provided a reasonable facsimile of the MRO data suite.
Fig. 2.

Orbital data inputs for pre-fieldwork site assessment. The rectangle in (a)–(c) is the area shown in (d). The oval in each image indicates the starting point for field work. (a) ~6 m/pxl visible wavelength grayscale image, mimicking CTX data. (b) Multispectral dataset similar to MRO CRISM data, reduced to RGB highlighting mineralogy: red = Fe-bearing minerals, blue=Al-OH- and Mg-OH-bearing minerals (e.g., phyllosilicates and carbonates); purple/white=carbonates or silica rich sandstones; green/gray/orange=Fe oxides (hematite/goethite); white/blue = phyllosilicates or carbonates; green = vegetation. (c) 75 m/pxl digital terrain model (DTM); this is analogous to HRSC-resolution DTMs. (d) 2 m/pxl color image draped over 5 m/pixel HiRISE stereo pair-equivalent DTM) yielding a perspective view. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)
Using these data, the team created a geomorphic map of the field site from which to develop hypotheses for the location and depositional history of biologically relevant units, and plan notional traverses to address these hypotheses (Fig. 3). We posed three possible science hypotheses with potential evidence to search for to confirm or refute each (Table 3), and the science team planned the notional traverse with stopping points, or stations, as shown in Fig. 4, as the path that would most efficiently address the hypotheses stated. Science stations the team identified as potentially important from the remote-sensing coverage (shown as numbered diamonds in Fig. 4) were units or layers with strong phyllosilicate or carbonate spectral signatures, or places where two or more units might be sampled at once.
Fig. 3.
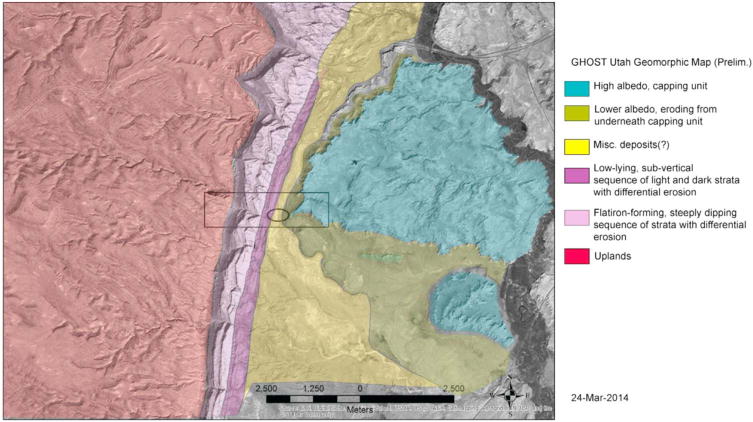
Geomorphic map of San Rafael Swell, UT.
Table 3.
Science hypotheses defined by science team.
| Science hypothesis for geologic history of layer sequence | Test to support hypothesis | Assessment |
|---|---|---|
| The presence of carbonates and phyllosilicates are indicative of a past marine environment (shallow to deep marine). | Identify logical succession of chemical types, presence of other marine indicators (fossils, massive grain-free carbonate, sandstones/mudstones). | Favored |
| Fluvial activity drew out carbonates and phyllosilicates from previously emplaced layers; carbonate may be caliche. | Identify relic features in the layers inconsistent with marine deposition, mixtures of altered material and unaltered original lithology. | Alternate |
| The presence of hydrated minerals is due to in-place alteration by groundwater. | Identify horizons of distinct alteration (such as caliche); look for alteration minerals that occur across lithologic boundaries. | Least-favored |
Fig. 4.
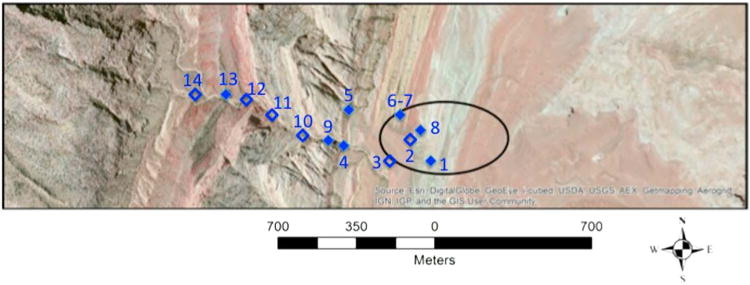
Notional traverse, with stations (blue diamonds) numbered in the order they were examined. Open diamonds indicate those stations that were interrogated in Run 1, while closed diamonds are stations analyzed in Run 1 and Run 2.
5.2. Field activities
In the field, the science team set up a Base Camp and divided into the Rover Team, Tiger Team, Site Expert and Rover. All team members were co-located during the test. While not ideal, this choice was made to facilitate communications between teams and between the Rover and Rover Team, as our field site had no cell phone or Internet service. The team considered a scenario in which the Rover and Site Expert would conduct field activities while the Rover Team remained offsite in a local hotel. However, this would have allowed only a single “down-load-upload” cycle per day, as the Rover would have been required to execute all commands in the field, out of communication with the Rover Team. This would have limited the test to 2–3 sols, which would not have been a sufficient period of time to reveal the positives and negatives of the method.
The Rover Team executed commands to the rover from Base Camp by projecting previously acquired data onto a laptop screen for the Rover, using this to precisely pinpoint the locations and resolutions at which images were to be acquired. Any targets had to be clearly visible in previously-acquired images to be eligible for further analysis. The Rover was a field assistant with no prior geologic experience. This ensured that the Rover could not unconsciously adjust data requests to include a more optimal choice of imaging or sampling targets.
The Rover Team commanded the rover to conduct distance reconnaissance of the entire site by acquiring a 360° panorama of the site (mimicking a panoramic mosaic). They then followed their planned traverse twice. During Run 1, the “walkabout,” stations were studied in numbered order, using cm-scale resolution color images and XRD data coarsened to mimic results from remote geochemical instruments such as Mini-TES (MER), APXS (MER, MSL) and ChemCam (MSL). These data were used to down-select the stations to those most likely to reveal evidence that would support or refute the science hypotheses in Table 3. This subset of stations was then interrogated during Run 2 (“in-depth analysis”) using mm- to μm-scale resolution images (mimicking MI or MAHLI data) and XRF data at a resolution similar to the MER and MSL APXS (~2 cm sample diameter). The two Tiger Team geologists used standard terrestrial methods to study the geology of the site; these methods also included a walkabout of the terrain prior to in-depth analysis. Tiger Team activities yielded a standard set of observations and interpretations against which we could compare Rover Team results and interpretations. Observations are detailed Table 4, recorded based on the calculated number of sols each set of observations would commonly require if run on Mars.
Table 4.
Observations by sol.
| Station | Run 1 (remote data)
|
Run 2 (contact science)
|
||||
|---|---|---|---|---|---|---|
| Data collected | Observations | Conclusions | Data collected | Observations | Conclusions | |
| Station 1 | Run 1 observations for each station include (1) a full panorama of the site stretching from 20° above the horizon to ~1 m from the “rover’s” feet; and (2) 3–5 images looking directly down, mimicking the area in front of the rover that could be reached by the contact science instruments (referred to as the “work volume”). Total estimated sols = 14. | Chosen as base of operations for safety reasons. Oxidized, sandy surface. |
Low habitability potential but contact science conducted as baseline. | 1 context img; 9 image mosaic @ 10 μm/pxl; 1 sample for XRD. Total estimated sols = 2. |
Oxidized, fine-grained surface mixed with weathered clays. | Low habitability potential confirmed. |
| Station 2 | Chosen due to strong phyllosilicate or carbonate signature from orbit. Thinly-layered weathering silicate clays. |
Low habitability potential — no contact science. | n/a | n/a | n/a | |
| Station 3 | Chosen due to strong phyllosilicate or carbonate signature from orbit. Observations: Thinly-layered silicate clays. |
Low habitability potential — no contact science. | n/a | n/a | n/a | |
| Station 4 | Chosen due to strong carbonate or silica-rich sandstone signature from orbit. Massive dissected carbonate. | High habitability potential. | Three targets, each with 1 context img; 10 image mosaic @ 10 μm/pxl; 2 samples for XRD. Total estimated sols = 8. |
Fine grained dolomite interbedded with silt/muds. Fossilized oysters and Mg-rich chert nodules locally present. | High habitability potential confirmed. | |
| Station 5 | Chosen to place layers in geologic context. Sandstone layers of varying morphology/composition. | Unclear habitability potential. Station 5 has low habitability potential but contact science conducted to fully characterize layer sequence. | 1 context img; 9 image mosaic @ 10 μm/pxl; 1 sample for XRD. Total estimated sols = 3. |
Sandstone. | Low habitability confirmed. | |
| Station 6 | Two close targets, each with 1 context img; 9 image mosaic @ 10 μm/pxl; 1 sample for XRD. Total estimated sols = 3. |
Dominated by laminar bedding of quartz(?) grains < 100 μm in a siliceous cement. Local diagenetic features. | Potentially habitable. | |||
| Station 7 | 1 context img; 9 image mosaic @ 10 μm/pxl; 1 sample for XRD. Total estimated sols = 3. |
Well sorted, rounded, fine grained (< 100 μm) deposit inferred to be a shallow subaqueous depositional environment. | Potentially habitable. | |||
| Station 8 | Chosen due to strong carbonate or silica-rich sandstone signature from orbit. Sandstone layer with nodules. | Unclear habitability potential. | Two targets, each with 1 context img; 10 image mosaic @ 10 μm/pxl; 2 samples for XRD. Total estimated sols = 6. |
Fine-grained carbonate-cemented sandstone with local diagenetic nodules and calcite veins. | Potentially habitable. | |
| Station 9 | Chosen due to strong carbonate or silica-rich sandstone signature from orbit. Massive carbonate layer. | High habitability potential. | Four close targets, each with 1 context img; 10 image mosaic @ 10 μm/pxl; 1 sample for XRD. Total estimated sols = 4. |
Massive dissected carbonates. Carbonate-cemented very fine grained sandstone. Abundant fossilized oyster shells up to 9 cm. | Habitability potential confirmed. | |
| Station 10 | Chosen due to strong carbonate or phyllosilicate signature from orbit. Sandstone layer. | Low habitability potential — no contact science. | n/a | n/a | n/a | |
| Station 11 | Chosen due to strong carbonate or silica-rich sandstone signature from orbit. Eolian sandstone layer. | Low habitability potential — no contact science. | n/a | n/a | n/a | |
| Station 12 | Chosen due to strong carbonate or phyllosilicate signature from orbit. Sandstone layer. | Low habitability potential — no contact science. | n/a | n/a | n/a | |
| Station 13 | Chosen due to strong carbonate or phyllosilicate signature from orbit. Massive carbonate layer. | High habitability potential. | Three close targets, each with 1 context img; 10 image mosaic @ 10 μm/pxl; 1 sample for XRD. Total estimated sols = 3. |
Massive carbonate-cemented, very fine-grained sandstone. | High habitability potential confirmed. | |
| Station 14 | Chosen due to strong carbonate or silica-rich sandstone signature from orbit. Sandstone layer. | Low habitability potential — no contact science. | n/a | n/a | n/a | |
| Total sols Run 1: 14 (science) + 14 (drive) = 28 | Total sols Run 2: 32 (contact science) + 14 (drive) | |||||
The Rover Team visited fourteen stations during Run 1 (Fig. 5), assessing the data as it was downloaded from rover instruments, and making preliminary decisions as to whether that station should be interrogated in-depth during Run 2. All remote images were downloaded directly onto a laptop, mosaics were created rapidly, and the Rover Team spent an average of 1–2 hoursh analyzing these images to determine which stations would be assessed in-depth. Representative compositional data was also provided during each “download” period, to feed into that assessment. The final determination of which stations would be examined in Run 2 was made once all data from Run 1 had been downloaded and assessed. On Mars, observations are commonly limited to a pre-determined number of contact science stations or targets; here, we chose not to arbitrarily limit the number of Run 2 contact science stations, in order to get a more complete idea of how many stations could legitimately be eliminated using the walkabout methodology. Ultimately, the Rover Team cut six stations (40%; Table 4) as being either redundant, not as representative of a specific environment as another station, or not promising (or as promising as other stations) for addressing the hypotheses listed in Table 3. Stations retained included calcite-rich and fossiliferous layers, as well as layers that yielded contextual geologic data (e.g., Stations 5–7 sampling narrow layers recording diverse environments).
Fig. 5.
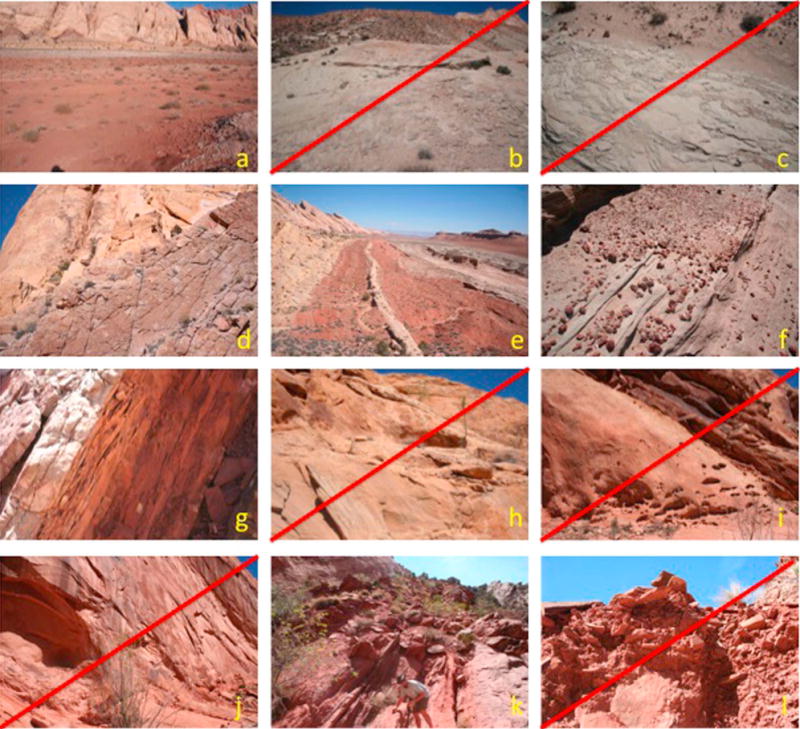
Meter-scale panoramic images of stations along the traverse shown in Fig. 4. Stations with a red line were not analyzed in Run 2. (a) Station 1, chosen as base of operations for safety reasons. Station has an oxidized, sandy surface. This station has a low habitability potential but contact science was conducted as baseline. (b) Station 2, chosen due to strong phyllosilicate or carbonate signature from orbit. Station is composed of thinly-layered, siliceous sandstone with minor amounts of clay minerals. This station has a low habitability potential. (c) Station 3, chosen due to strong phyllosilicate or carbonate signature from orbit. Station is composed of thinly-layered silicate clays. This station has low habitability potential. (d) Station 4, chosen due to strong carbonate or silica-rich sandstone signature from orbit. Station is composed of massive dissected carbonate, and thus has high habitability potential. (e) Stations 5–7, chosen to place layers in geologic context. These stations are sandstone layers of varying morphology/composition, with unclear habitability potential based on remote data. (f) Station 8, chosen due to strong carbonate or silica-rich sandstone signature from orbit. This station is a sandstone layer with nodules, and thus has unclear habitability potential. (g) Station 9, chosen due to strong carbonate or silica-rich sandstone signature from orbit. Station is a massive carbonate layer, with high habitability potential. (h) Station 10, chosen due to strong carbonate or phyllosilicate signature from orbit. This station is a sandstone layer with low habitability potential. (i) Station 11, chosen due to strong carbonate or silica-rich sandstone signature from orbit. This is an eolian sandstone layer with low habitability potential. (j) Station 12, chosen due to strong carbonate or phyllosilicate signature from orbit. This sandstone layer has low habitability potential. (k) Station 13, chosen due to strong carbonate or phyllosilicate signature from orbit. Station is a massive carbonate layer, and thus has high habitability potential. (l) Station 14, chosen due to strong carbonate or silica-rich sandstone signature from orbit. This sandstone layer has low habitability potential. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)
Following Run 1, the Rover Team directed the rover to acquire geochemical and mm- to μm-scale imaging data on up to four targets at each of the downselected stations, as shown in Fig. 6. Based on previous MER activities, it was assumed that one sol could accommodate interrogation of up to three separate targets in close proximity to each other. Stations analyzed in Run 2 included stations 4, 6–9 and 13. Station 1, near the location of Base Camp, was also examined in-depth during Run 2, to provide a contextual set of geologic data for all further analysis. During Run 2, hand lens-scale images were downloaded directly onto a laptop, mosaics were created rapidly, and the Rover Team spent an average of 0.5–1 hoursh analyzing these images to assess their habitability potential and determine if changes were needed to the planned traverse. Representative fine-scale compositional data mimicking the APXS was also provided during each “download” period. Run 1 was completed in ~12 hoursh over ~1.5 days. Run 2 was completed in ~16 hoursh over two days.
Fig. 6.
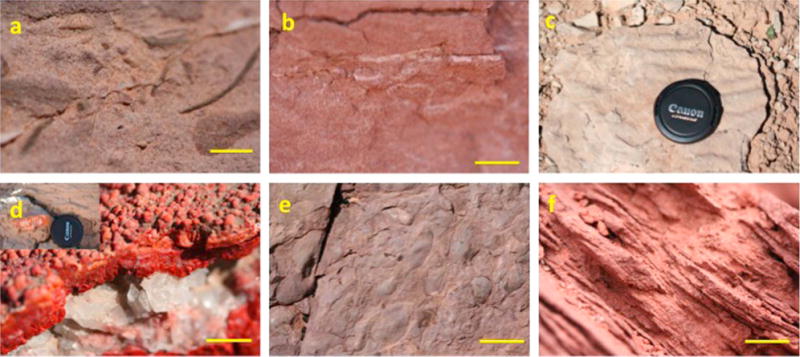
Stations at which contact science was conducted; yellow bar is 5 mm long. (a) Station 4 at 10 μm/pxl. Fine grained dolomite interbedded with silt/muds, bearing fossilized oysters. (b) Station 6 at 10 μm/pxl. Rock dominated by laminar bedding of quartz (?) grains < 100 μm in a siliceous cement, also bearing local diagenetic features. (c) Station 7 at 100 μm/pxl. Well sorted, rounded, fine grained (< 100 μm) loose cobble with ripple marks. (d) Station 8 at 10 μm/pxl; inset is a context image at 100 μm/pxl. Fine-grained carbonate-cemented sandstone with local diagenetic nodules and calcite veins. (e) Station 9 at 10 μm/pxl. Carbonate-cemented very fine grained sandstone, bearing fossilized bivavle shells. (f) Station 13 at 10 μm/pxl. Laminated carbonate-cemented, very fine-grained sandstone. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)
6. Assessment
There are two questions we may ask to assess the results of this field test: (1) were science output and outcomes improved using the walk-about-first approach; and (2) how much time and consumable resources did we save (if any) to get at least as positive a science outcome as the linear method would yield? The first question may be addressed by holding the number of science sols constant and assessing science gained or lost. The second may be addressed by assuming an equivalent science outcome for both approaches and calculating number of sols saved or lost. Doing the former requires comparison with baseline science results from the Tiger Team. The latter is more quantifiable, because we can extrapolate how many sols it would take to perform our observations. Thus, to assess the walkabout method we quantify the number of science activity sols saved in its execution, and we qualitatively assess the science outcomes using a similar metric to that employed by Yingst et al. [13].
6.1. Assessing sols saved
Measuring success by assuming a limit to the number of sols that can be spent on a specific area or campaign is a reasonable choice because nearly every MER rover campaign in practice has been limited by the competing needs of meeting the various mission goals. Indeed, every mission is time-limited, because every spacecraft has a finite lifespan. In order to make a robust comparison, the number of sols required to run the walkabout-first approach must be compared to the number of sols that would be required to follow the same traverse using the linear approach. Thus, the extra time spent going over the traverse twice in the walkabout-first approach must be compared to the time that would be spent interrogating every station with contact science instruments using the linear method (rather than being able to down-select to a subset of contact science stations).
Our calculation of sols spent on the walkabout-first method is based on the MER Whitewater Lake example [9], which was limited prior to the rover’s arrival to 130 sols. In this location, the rover executed a walkabout of the entire planned traverse, followed by interrogation of stations downselected during the walkabout. Basic imagery was acquired at each station and tied to the orbital map. Panoramic mosaics were taken by the navigational cameras at each site, along with a set of targeted images at nearby outcrops in between stops. The walkabout was designed to provide contextual insight into the geology of the region before studying the most important targets. Once the walkabout was completed, the remaining sols were utilized to conduct in-depth study of a subset of targets at the cadence of ~3 sols per contact science station, plus at least one sol expended for each additional target analyzed at the same station. For both the linear and walkabout methods, we bookkeep one sol of driving between stations. This is solely for purposes of comparison – the number of drive sols between stations depends on the terrain and distance between science targets in the real setting.
For each station, one sol of driving and one sol of targeted remote sensing for station characterization are required. If contact science is chosen, then these sols would be followed by three sols of contact science - one sol spent on a bump to the chosen contact science target, one sol to place contact science instruments and acquire images, and one sol for integration for geochemical data. An additional sol would be required to acquire more images or geochemical data from a different position at the same station. We note that a “bump” is a rover move to position the rover for contact science, so is a necessary part of resource calculation for contact science. In general, a rover move on one sol precludes targeted data collection on that same sol because the final state of the rover is unknown until the data is received on the ground, so targeted remote sensing and contact science may not be combined into a single sol with the bump. Therefore, a “bump” sol is counted separately for those stations that require targeted remote sensing and/or contact science.
For the linear method, the baseline is that all 14 stations identified before arrival would have been interrogated in depth. This includes: one drive sol, one targeted remote sensing sol, three sols for contact science, plus one additional sol for a second contact science target or additional remote sensing. This package of six sols, repeated over 14 stations, requires 84 sols to execute the linear method.
For the walkabout-first method, Run 1 includes one sol of driving plus one sol of remote sensing per station, yielding 28 sols for the 14 stations. In Run 2, we bookkeep the additional 14 sols of driving to traverse the loop a second time. However, the walkabout-first method allowed us to downselect to only six stations for contact science, and only two of those stations (Stations 8 and 9) required “additional” contact science sols over the baseline of three sols per station. The Run 2 science sol estimates are given in Table 4 and add up to 32 sols of contact science. Therefore, the walkabout-first method requires 28 sols for Run 1, plus 46 sols for Run 2, totaling 74 sols. This represents a savings of ~10 sols to achieve a similar result, or more than 12% less time and consumables deployed.
While by far the most common scenario, the MER rovers have not always performed contact science at every waypoint in a given campaign. In the end-member case in which up to two waypoints are dropped from a linear campaign (for example, because the team has determined from remote sensing data that additional waypoints would yield only diminishing returns), this would yield six fewer sols or 78 sols to execute the linear method in that case. In this situation, the walkabout method would yield a time savings of 5%.
Finally, we note that the above estimates constitute a generic worst-case scenario, as it retains every drive sol in the walkabout method, even though not every station was revisited. It assumes no shortcuts past dropped sites are possible, and that every station is at least a sol’s drive from the next. If a shorter route could be planned between downselected sites, or if multiple stations can be passed within a single sol on the original traverse (i.e., stations are close together), the number of sols required for the walkabout would be fewer. For the case of our field test, if we assume that eight dropped stations yielded a savings of eight sols, the walkabout-first method would then require 20 sols for Run 1, plus 46 sols for Run 2, totaling 66 sols, yielding a savings of 16 sols to achieve a similar result, or ~ 21% less time and consumables deployed.
6.2. Assessing science quality and quantity
The goal of this field test was to identify and characterize the benefits and drawbacks to science outcomes of utilizing a specific field approach. To determine the efficacy of the tested approach, we use a rating system such that if the metric was fully achieved, the metric receives a “yes” and if it is not fully achieved, the rating given is “no”; if a metric is partly achieved, the metric receives a “partly.” In all cases a more detailed explanation of the reasoning for each rating is given. This information is summarized in Table 5.
Table 5.
Assessment of science output.
| Science Metric | GHOST Rover Team | Tiger Team | Comments |
|---|---|---|---|
| Did the team identify as contact science stations the most relevant units for meeting the science goal and addressing the science hypotheses? | Yes | Yes | There was a nearly one-to-one correlation between the stations chosen by the Rover Team for in-depth analysis during Run 2, and those locations where the Tiger Team focused their efforts. Likewise, the Tiger Team chose to forego in-depth analysis at the same stations the Rover Team chose to forego during Run 2. |
| Did the team identify habitability potential at the site? | Yes | Yes | The Rover Team located fossil-bearing units and other evidence for potential habitability, including very fine-grained well-sorted sandstones; diagenetic nodules; Mg-rich chert nodules; and calcite veins. |
| Did the team identify evidence of habitability at the site? | Yes | Yes | Instruments used by the rover were sufficient to identify fossils within fossil-bearing units. |
| Did the team characterize the overall geologic environment of the geologic units? | Partly | Yes | The Rover Team was able to identify major geologic units and the environments in which they were emplaced, including diagenesis. However, the approach was not sufficient to allow the Rover Team to identify smaller units such as lenses, localized channel fills and thinner beds, as well as diagenetic details. |
| Did the data acquired by the team lead to one or more hypotheses of geologic history being confirmed? | Yes | Yes | The walkabout-first approach allowed the Rover Team the triage data and the analysis time to efficiently test and eliminate hypotheses prior to committing the most costly resources. |
7. Discussion and lessons learned
Significant findings regarding the use of the walkabout-first approach in exploring a field site using a semi-autonomous rover involve (a) the accuracy of the science output (i.e. the assessment of the site’s geologic history and habitability potential); and (b) the efficiency by which that output is achieved.
7.1. Assessing geologic history and habitability
Employing the walkabout-first method produced improved science output compared to science operations methods tested in previous studies (e.g., [4,5]). Specifically: (1) there was a higher degree of accuracy in conclusions regarding geologic history and past geologic environments; and (2) relevant materials addressing test goals were identified and characterized more accurately and more thoroughly than in prior studies testing other methods of executing science operations. As in previous tests, the Rover Team was able to identify major geologic units and the environments in which they were emplaced, including gaining a basic understanding of local diagenesis. While the Rover Team missed localized diagenetic features, as well as smaller units and sedimentary structures such as lenses, localized channel fills and thinner beds identified by the Tiger Team, they characterized the overall geologic history sufficiently to meet the test goals. Additionally, there was a strong correlation between the units the Tiger Team identified as most relevant to the geologic goals, and those the Rover Team identified as such.
This improved science result likely stems from two facts. Firstly, the Rover Team could see all potential contact science stations within their larger surface geologic context. This allowed them to better assess which were the highest priority sites, where in-depth interrogation by higher-resolution imaging and geochemical analysis would yield the most relevant results. Secondly, the Rover Team had more time to develop mature hypotheses in preparation for the contact science data that came during Run 2. Their confidence in their station assessment and interpretations was greater, and their conclusions were confirmed more consistently by Tiger Team results, than was the case in previous GHOST tests. We note that there was a difference in orbital data quality and quantity between this and other GHOST tests. The orbital data available to the entire science team for previous field sites was spotty in terms of coverage, and mineralogical data was coarse and of poorer quality. While this did not improve our ability to create a nominal traverse prior to field work, the higher quality orbital data did allow the science team for this site to construct somewhat more detailed hypotheses to test on the ground.
7.2. Efficiency in science operations
The most conservative estimate of the walkabout-first approach saved an estimated 10 sols over the linear method, or 12% of the overall field time devoted to science. It accomplished this by eliminating hypotheses efficiently, such that the resulting science met mission objectives better than the linear approach would have done using similar rover resources. The clearest example of this issue occurred when doing remote reconnaissance of stations 1–3 during Run 1. These stations had a clear phyllosilicate signature from orbit. This was of interest to the Rover Team because phyllosilicates are considered a potential indicator of habitability and potential biosignature preservation. Specifically, they indicate no extremes in pH value that could be harmful to life, they have strong electric reactivity that might bind organic molecules, improving the chance of preservation, and their low porosity and permeability result in less pore space for oxidation reactions that could destroy organics. However, it became clear from acquired Pancam-like images that the phyllosilicate signature at stations 1 and 2 were due to unconsolidated surface clay particles and thus these stations had poor habitability potential. The morphology at station 3 also yielded no indication of potential past habitability, so the team inferred the phyllosilicate signature was due not to a past environment amenable to life, but to tiny percentages of clay within the local sediments. They therefore chose not to conduct contact science there. This interpretation was confirmed by post-field laboratory analysis of sample composition that identified ~1% clay minerals in the rock matrix as the likely carrier of the spectral signature. If the Rover Team had not had an in situ contextual understanding of the rest of the site, and did not know there were more promising locations elsewhere, they likely would have remained and performed contact science at station 3 to confirm or refute their original hypothesis, simply because the location occurred early in the traverse. Consequently, in an actual Mars scenario, the sol limit may have been reached before the team reached the best locations.
We infer from this result that the walkabout-first approach is efficient in situations where (1) identification of a specific feature, material or environment is the goal; and (2) there are a number of potential locations to interrogate in-depth; that is, situations where triage of sites is a rate-determining step. To generalize this assessment, the more potential contact science sites identified in an area, the more time-efficient the walkabout-first approach may be. Interestingly, it appears that in such cases, spending more time up front saves time later on. For example, the time required to execute Run 1 had the benefit of slowing down mission progress to allow for more rigorous science analysis, an important tension point for science operations, as noted in Yingst et al. [4,5,31]. Consequently, the Rover Team did not have to entertain all hypotheses during contact science, only a more narrow, and better understood, subset. Both the number of contact science sites, and the time spent at these sites, was thus decreased. In a real Mars situation, it would likely also allow more time to analyze data from instruments that cannot provide tactically relevant information (e.g., ChemCam). A walkabout provides more time for the teams of such instruments to refine data so that data can inform later contact science decisions.
7.3. Comparison with MSL-class rover mission protocols
Our assessment of the walkabout-first approach is valid for science operations for MER-class missions: small reconnaissance missions with a few efficient, generalized instruments requiring low power and data volume to run. The MSL model of science operations derives from the MER science operations protocols, but with some key differences that make a direct application of our results to MSL operations problematic. Firstly, the complexity of the payload requires that MSL maintain both a strategic and a tactical planning process; these are separated more distinctly than in MER operations into two formal operations streams, and intersect only at key points in the day-to-day tactical process tested here [3]. Secondly, unlike MER, the MSL rover does not have the ability to use geochemical information on the tactical timeline. Thirdly, MSL requires fewer sols to utilize contact science instruments than MER; a bump to a contact science location is often not required, for example, and MAHLI, ChemCam, and APXS can provide textural and geochemical data on multiple targets on a single sol. We note also that MSL has a number of laboratory-type instruments, but we did not attempt to model their use, because their data tend not to be relevant for immediate tactical decision-making. However, within these constraints, we can attempt to extrapolate our results to missions with more instruments and a more narrow purpose, and thus make some inferences for the MSL-class mission (e.g., MSL, Mars 2020).
To do this, we first calculate what a walkabout-first approach might cost in terms of sols, based on the example of the Pahrump Hills campaign carried out by the MSL Curiosity rover between sols 753–948 of its mission. This was designed as a walkabout-first campaign, where the rover was not limited to a specific number of sols, but there was significant pressure within the science team to complete the interrogation of the site in as short a time as possible. In this location, the rover executed three loops through the chosen traverse. It first examined the entire planned traverse using its remote instruments (imagers and ChemCam; the additional time taken for loop 1 allowed ChemCam data to be refined so they were ready in time to inform loop 2). This was followed by a second loop focused on contact science analysis at seven locations chosen using data from the first run through the traverse. These locations were narrowed down to the three sites considered the highest science value, for drilling and sample analysis by the laboratory instruments during the third and final loop. For contact science locations, the average cadence was one sol for drive to the location, plus one sol per contact science target at that location, meaning that MSL was able to complete contact science at each station more rapidly than a MER-class rover could.
With respect to sols spent, given that MSL contact science requires less time than for MER, it might initially appear that the time savings using the walkabout-first approach would be less pronounced in an MSL-class mission. However, it must be remembered that MSL used contact science for triaging stations for drilling and sample analysis, while for MER, contact science is the most in-depth analysis that can be conducted. This indicates that, for a mission class such as MSL or Mars 2020, our results can provide an estimate of the number of sols required to mature the science knowledge to the point where the laboratory or sampling tools could be used. A logical follow-on test would be to rigorously assess the actual time savings, if any, of the walkabout-first method for an MSL-class science mission operations scenario.
With respect to science quality and quantity, we note an important distinction between MSL and MER science operations. Unlike the early MER mission (and this analog test), where geochemical data was tactically available to inform evolving hypotheses, in the MSL example of Pahrump Hills, hypotheses were formed and initially developed based solely on imaging data, before remotely-acquired ChemCam data could be fully interpreted. This lack of geochemical data may have biased the science team towards certain hypotheses that may or may not have been supported by the later geochemical story, but were difficult to dislodge once initially accepted. This suggests that for an instrument payload that does not include a tactically-relevant geochemical instrument, care must be taken by the science team to not weigh one type of data (imaging vs. geochemistry) over another and to be open to considering new models as geochemical and mineralogical data become available.
8. Conclusions
Our hypothesis that the walkabout-first strategy can potentially save time and other mission resources, while improving science return, was confirmed for the test case of reconnoitering a site of potential past habitability. The success of this approach lies in the fact that data at the in-situ scale provides greater contextual data to complement orbital information, and thus allows more informed choices of where to spend consumable resources, saving time and resources in certain circumstances. This makes the walkabout an important tool in conducting efficient field geology with a semi-autonomous rover such as MSL or Mars 2020.
The results here indicate that the walkabout-first approach may be the best tool when faced with many potential contact science sites that must be culled to more manageable numbers. This situation would arise when mission goals include finding, identifying and characterizing or sampling a specific material, feature or type of environment within a certain area. For example, using the linear approach for a sample caching mission such as Mars 2020 [44] may necessitate design of a sample ejection system, where previously-collected samples can be discarded in favor of more interesting ones found later in the mission. Such a system will increase design cost and complexity. However, the walkabout-first approach may obviate the need to design a sample ejection system for rocks that are no longer desired by enabling the team to identify with confidence the highest-priority samples that fit the cache size. Conversely, for a mission where reconnaissance of a general region or environment is the primary goal, the linear approach covers more ground faster. For such a mission (of which MER is a prime example), the walkabout-first approach might be useful in particular circumstances where narrow hypotheses are being tested and thus specific evidence is being searched for in a discrete area.
For the test reported here, ideally, the linear approach would have been executed concurrently with the walkabout-first approach, so the two could have been directly compared; this is a goal for future work. The next logical steps would include: (a) test the walkabout-first and linear approaches at the same site, to allow a direct qualitative and quantitative comparison of the merits of both approaches in terms of number of sols used, area covered, time expended, and science returned; and (b) for both approaches, specifically test the science-driven decision-making process involved in choosing samples. Understanding the parameters of the trade-space between improving science return and time/mileage expended when making science-based decisions for sampling will be vital to the success of sample cache or return missions [44].
Acknowledgments
We gratefully acknowledge the efforts of field assistant Ross Nova, our “rover” for the field test. This research was supported through Moon and Mars Analog Mission Activities Program grant NNG05GL66G to RAY.
Biographies

R. Aileen Yingst, a Senior Scientist for the Planetary Science Institute, is the Deputy Principal Investigator for the Mars Hand Lens Imager on the Mars Science Laboratory rover Curiosity. She also serves as a Participating Scientist on the Mars Exploration Rover and Dawn at Vesta missions. Prior to that she did postdoctoral work in multispectral analysis on the Mars Pathfinder and Mars Polar Lander missions. Dr. Yingst received her AB from Dartmouth College in Physics and Astronomy, and her M.Sc. and Ph.D. in Geological Sciences from Brown University.

Barbara A. Cohen is the lead Lunar & Planetary scientist at Marshall Space Flight Center, where she supports NASA planning human and robotic exploration of the Moon, Mars, and asteroids. She is a participating scientist in the Mars Exploration Rover mission. Her research interests lie in the composition and geochronology of planetary samples, and she has been to Antarctica twice with the Antarctic Search for Meteorites. Dr. Cohen earned her BS in Geology from Stony Brook University College and her Ph.D. in Planetary Science from the University of Arizona.
Brian Hynek is an Associate Professor in the Department of Geological Sciences and a Research Associate at the Laboratory for Atmospheric and Space Physics, both at the University of Colorado. His research revolves around the geologic, hydrologic, and climatic histories of the planet Mars and all things related. Specifically, Dr. Hynek focuses on dealing with past fluvial erosion on Mars, Martian volcanoes, geologic mapping, habitable environments, aqueous geochemical modeling, and terrestrial analog work. Dr. Hynek earned his BA in Earth Science Education and All Sciences Education from University of Northern Iowa and his MA and Ph.D. in Earth and Planetary Sciences from Washington University in St. Louis.
Mariek E. Schmidt is an Associate Professor of Earth Sciences at Brock University, St. Catharines, Ontario, Canada. She is a Canadian Space Agency-supported Participating Scientist and Alpha Particle X-ray Spectrometer (APXS) team member on the Mars Science Laboratory mission. Before moving to Canada, Dr. Schmidt was a Post-doctoral Fellow and Collaborator on the Mars Exploration Rover mission. Her current research is 50–50 split between two planets, studying the igneous evolution and alteration of basaltic rocks on both Earth and Mars. Dr. Schmidt received a BA in Geology from Colby College and Ph.D. In Geology from Oregon State University.
Jeff A. Berger is a Ph.D. Candidate in Geology and Planetary Science at the University of Western Ontario in London, Ontario, Canada. He has been an MSL Science Team Collaborator since 2012 as a part of the Alpha Particle X-ray Spectrometer (APXS) team, now supported by his Ph.D. advisor Dr. Mariek Schmidt. His dissertation involves the geochemistry and mineralogy of the martian crust and surface materials and analogous materials at Maunakea, Hawai’i. He received a B.S. in Geology from Portland State University and an M.S. in Earth and Planetary Sciences from the University of New Mexico.
Contributor Information
J. Berger, Email: jeffberger@cpsx.uwo.ca.
B.A. Cohen, Email: barbara.a.cohen@nasa.gov.
B. Hynek, Email: hynek@lasp.colorado.edu.
M.E. Schmidt, Email: mschmidt2@brocku.ca.
References
- 1.Squyres SW, et al. Athena Mars rover science investigation. J Geophys Res. 2003;3:806. doi: 10.1029/2003JE002121. [DOI] [Google Scholar]
- 2.Bass DS, Talley KP. Phoenix surface mission operations processes. J Geophys Res. 2008;113 doi: 10.1029/2007JE003051. [DOI] [Google Scholar]
- 3.Vasavada AR, Grotzinger JP, Arvidson RE, Calef FJ, Crisp JA, Gupta S, Hurowitz J, Mangold N, Maurice S, Schmidt ME, Wiens RC, Williams RME, Yingst RA. Overview of the Mars Science Laboratory mission: Bradbury Landing to Yellowknife Bay and beyond. J Geophys Res. 2014;2014 in press. [Google Scholar]
- 4.Yingst RA, Cohen BA, Crumpler L, Schmidt ME, Schrader CM. Testing Marsinspired operations strategies for semi-autonomous rovers on the Moon: the GeoHeuristic Operational Strategies Test in New Mexico. Mars. 2011;6:13–31. doi: 10.1555/mars.2011.0002. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 5.Yingst RA, Cohen BA, Hynek B, Schmidt ME, Schrader CM, Rodriguez A. Testing Mars-inspired operational strategies for semi-autonomous rovers on the Moon II: the GeoHeuristic Operational Strategies Test in Alaska. Acta Astronaut. 2014;99:24–36. doi: 10.1016/j.actaastro.2014.01.019. [DOI] [Google Scholar]
- 6.Arvidson RE, et al. Spirit’s campaign in the inner basin, Columbia Hills, Gusev Crater. Lunar Planet Sci Conf 38th; 2007; Abs, 1122. [Google Scholar]
- 7.Grotzinger JP, et al. Stratigraphy and sedimentology of a dry to wet eolian depositional system, Burns formation, Meridiani Planum, Mars. Earth Planet Sci Lett. 2005;240:11–72. [Google Scholar]
- 8.Grotzinger JP, et al. A habitable fluvio-lacustrine environment at Yellowknife Bay, Gale crater, Mars. Science. 2014;343:1242777. doi: 10.1126/science.1242777. [DOI] [PubMed] [Google Scholar]
- 9.Arvidson RE, et al. Ancient aqueous environments at Endeavour crater, Mars. Science. 2014;343:1248097. doi: 10.1126/science.1248097. [DOI] [PubMed] [Google Scholar]
- 10.Greeley R, Basilevsky AT, Kuzmin RO, Stoker CR, Taylor GJ. Science results from the Marsokhod tests, Amboy lava field. California, paper presented at the International Planetary Rover Symposium; Moscow, Russia. May, 1994. [Google Scholar]
- 11.Stoker C, Hine B. Telepresence control of mobile robots: Kilauea Marsokhod experiment, Pap. 96-0338. Am Inst Aeronaut Astronaut. 1996 Reno, Nev. [Google Scholar]
- 12.Yingst RA, Schmidt ME, Lentz RCF. Observations of a potential Mars analog at the microscale using rover-inspired methods: a 10-sol observation of Fort Rock tuff ring. J Geophys Res. 2009;114 doi: 10.1029/2008JE003223. [DOI] [Google Scholar]
- 13.Yingst RA, Berger J, Cohen BA, Hynek B, Schmidt M. Determining best practices in reconnoitering sites for habitability potential on Mars using a semi-autonomous rover: a GeoHeuristic Operational Strategies Test. Acta Astron. 2015 doi: 10.1016/j.actaastro.2016.12.018. submitted. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 14.Eppler DB, Adams B, Archer D, Baiden G, Brown A, Carey W, Cohen B, Condit C, Evans C, Fortezzo C, Garry b, Graff T, Gruener J, Heldmann J, Hodges K, Hörz F, Hurtado J, Hynek B, Issacson P, Juranek C, Klaus K, Kring D, Lanza N, Lederer S, Lofgren G, Marinova M, May L, Meyer J, Ming D, Monteleone B, Morisset C, Noble S, Rampe E, Rice J, Schutt J, Skinner J, Tewksbury-Christle CM, Tewksbury BJ, Vaughan A, Yingst A, Young K. Desert Research and Technology Studies (DRATS) 2010 science operations: operational approaches and lessons learned for managing science during human planetary surface missions. Acta Astronaut. 2013;90:224–241. [Google Scholar]
- 15.Taylor GJ, Aubele J, Coombs C, Crumpler L, Ryder G. NASA Ames Res Cent. Mt. View, CA: 1995. Kilauea Marsokhod experiment: lunar team report. [Google Scholar]
- 16.Whittaker W, Bapna D, Maimone MW, Rollins E. Atacama desert trek: a planetary analog field experiment. Proceedings of the 7th International Symp. Artificial Intelligence, Robotics, and Automation for Space; Tokyo, Japan. 1997. [Google Scholar]
- 17.Stoker C. The search for life on Mars: the role of rovers. J Geophys Res. 1998;103:28,557–28,575. [Google Scholar]
- 18.Stoker CR, et al. The1999 Marsokhod rover mission simulation at Silver Lake. J Geophys Res 106, Mission Overview, Data Sets, and Summary of Results, California. 2001:7639–7664. [Google Scholar]
- 19.Stoker CR, Roush TL, Arvidson RE, Bresina JL, Bualat MG, Edwards LJ, Flueckiger LJ, Washington RM, Nguyen LA, Thomas H, Wright AR. Two dogs, new tricks: a two-rover mission simulation using K9 and FIDO at Black Rock Summit. Nevada, J Geophys Res. 2002;107 doi: 10.1029/2000JE001490. [DOI] [Google Scholar]
- 20.Fong T, Abercromby A, Bualat MG, Deans MC, Hodges KV, Hurtado J, Jr, Landis R, Lee P, Schreckenghost PD. Assessment of robotic recon for human exploration of the Moon. Acta Astronaut. 2010;67:9–10. [Google Scholar]
- 21.Roman MJ, Miller DP. Experiments with a more capable lunar rover. Proceedings of the Abs. 6th International Lunar Conference; Udaipur, India. 2004. [Google Scholar]
- 22.Cooper BL, Sharpe B, Schrunk D, Thangavelu M. Telerobotic exploration and exploration and development of the Moon. J Earth Syst Sci. 2005;114:815–822. [Google Scholar]
- 23.Glass B, Cannon H, Hanagud S, Lee P, Paulsen G. Drilling automation tests at a Lunar/Mars analog site. Lunar Planet Sci Conference, 37th; 2006; p. 2300. [Google Scholar]
- 24.Leeet P, et al. Haughton-Mars Project: 10 years of science operations and exploration systems development at a Moon/Mars analog site on Devon Island, High Arctic. Lunar Planet Sci Conference, 38th; 2007. p. 2426. [Google Scholar]
- 25.Kunii Y, Kuroda Y, Suhara M, Kubota T. Command data compensation for real-time tele-driving system on lunar rover: Micro-5, in: Proceedings of the 2001 ICRA. IEEE International Conference 2; 2001; pp. 1394–1399. [Google Scholar]
- 26.Miller DP, Machulis K. Visual aids for lunar rover teleoperation. Proceedings of the iSAIRASMunich; Germany. 2005. [Google Scholar]
- 27.Litaker HL, Howard RL. Social network analysis and dual rover communications. Acta Astronaut. 2013;90:367–377. doi: 10.1016/j.actaastro.2012.05.013. . [DOI] [Google Scholar]
- 28.Thomas G, Reagan M, Bettis EA, III, Cabrol N, Rathe A. Analysis of science team activities during the 1999 Marsokhod rover field experiment: implications for automated planetary surface exploration. J Geophys Res. 2001;106:7775–7783. [Google Scholar]
- 29.Love SG, Bleacher JE. Crew roles and interactions in scientific space exploration. Acta Astronaut. 2012;90:318–331. [Google Scholar]
- 30.Yingst RA, et al. Comparing Apollo and Mars Exploration Rover (MER)/Phoenix operations paradigms for human exploration during NASA Desert‐RATS science operations. Acta Astronaut. 2011;90:311–317. doi: 10.1016/j.actaastro.2011.10.001. [DOI] [Google Scholar]
- 31.Yingst RA, Russell P, Kate IL ten, Noble S, Graff T, Graham LD, Eppler DB. Designing remote operations strategies to optimize Science mission goals: Lessons learned from the Moon Mars Analog Mission Activities Mauna Kea 2012 field test. Acta Astron. 2015;113:120–131. doi: 10.1016/j.actaastro.2015.02.029. [DOI] [Google Scholar]
- 32.MEPAG. Mars Scientific Goals, Objectives, Investigations, and Priorities: 2015. Hamilton chair VE, Hoehler T, Eigenbrode J, Rafkin S, Withers P, Ruff S, Yingst RA, Lim D, Whitley R, Beaty DW, Diniega S, Hays L, Zurek R, editors. 74p. white paper posted June 2015 by the Mars Exploration ProgramAnalysis Group (MEPAG) 2015 〈 http://mepag.jpl.nasa.gov/reports/MEPAG%20Goals_Document_2015_v18_FINAL.docx〉.
- 33.McLennan SM, et al. Provenance and diagenesis of the evaporite-bearing Burns formation, Meridiani Planum, Mars, Earth Planet. Sci Lett. 2005;240:95–121. [Google Scholar]
- 34.Nachon M, et al. Calcium sulfate veins characterized by ChemCam/Curiosity at Gale crater, Mars. J Geophys Res. 2014;119:1991–2016. [Google Scholar]
- 35.Lucas SG, Anderson OJ. The Jurassic San Rafael Group, Four Corners region Mesozoic geology and paleontology of the Four Corners region: New Mexico Geological Society. Guidebook. 1997;48:115–132. [Google Scholar]
- 36.Goodspeed TH, Lucas SG. Triassic of the American West. In: Lucas SG, Spielmann JA, editors. NM Museum of Natural History and Science Bulletin. Vol. 40. 2007. p. 2007. [Google Scholar]
- 37.Bell JF, III, Squyres SW, Herkenhoff KE, Maki JN, Ameson HM, brown D, Collins SA, Dingizian A, Elliot ST, Hagerott EC, Hayes AG, Johnson MJ, Johnson JR, Joseph J, Kinch K, Lemmon MT, Morris RV, Scherr L, Schwochert M, Shepard MK, Smith GH, Sohl-Dickstein JN, Sullivan RJ, Sullivan WT, Wadsworth M. Mars Exploration Rover Athena Panoramic Camera (Pancam) investigation. J Geophys Res. 2003;108 doi: 10.1029/2003JE002070. [DOI] [Google Scholar]
- 38.Herkenhoff KE, et al. Athena Microscopic Imager investigation. J Geophys Res. 2003;108:8065. doi: 10.1029/2003JE002076. [DOI] [Google Scholar]
- 39.Klingelhöfer G, et al. Athena MIMOS II Mossbauer spectrometer investigation. J Geophys Res. 2003;8:8067. doi: 10.1029/2003JE002138. [DOI] [Google Scholar]
- 40.Bell JF, III, Malin MC, Caplinger MA, Ravine MA, Godber AS, Jungers MC, Rice MS, Anderson RB. Mastcam multi- spectral imaging on the Mars Science Laboratory Rover: Wavelength coverage and imaging strategies at the Gale Crater field site. Lunar Planet. Sci. Conference 43rd Abstract; 2012; Abstract #2541. [Google Scholar]
- 41.Edgett KS, Yingst RA, Ravine MA, Caplinger MA, Maki JN, Ghaemi FT, Schaffner JA, Bell JF, III, Edwards LJ, Herkenhoff KE, Heydari E, Kah LC, Lemmon MT, Minitti ME, Olson TS, Parker TJ, Rowland SK, Schieber J, Sullivan RJ, Sumner DY, Thomas PC, Jensen EH, Simmonds JJ, Sengstacken AJ, Willson RG, Goetz W. Curiosity’s Mars Hand Lens Imager (MAHLI) Investigation. Space Sci Rev. 2012;170:259–317. doi: 10.1007/s11214-012-9910-4. [DOI] [Google Scholar]
- 42.Hynek BM, McCollom TM, Marcucci EC, Brugman K, Rogers KL. Assessment of environmental controls on acid-sulfate alteration at active volcanoes in Nicaragua: applications to relic hydrothermal systems on Mars. J Geophys Res. 2013;118:2083–2104. doi: 10.1002/jgre.20140. [DOI] [Google Scholar]
- 43.Christensen PR, Mehall GL, Silverman SH, Anwar S, Cannon G, Gorelick N, Kheen R, Tourville T, Bates D, Ferry S, Fortuna T, Jeffryes J, O’Donnell W, Peralta R, Wolverton T, Blaney D, Denise R, Rademacher J, Morris RV, Squyres S. Miniature thermal emission spectrometer for the Mars Exploration Rovers. J Geophys Res. 2003;108 doi: 10.1029/2003JE002117. [DOI] [Google Scholar]
- 44.Mustard JF, Adler M, Allwood A, Bass DS, Beaty DW, Bell JF, III, Brinckerhoff WB, Carr M, Marais DJDes, Drake B, Edgett KS, Eigenbrode J, Elkins-Tanton LT, Grant JA, Milkovich SM, Ming D, Moore C, Murchie S, Onstott TC, Ruff SW, Sephton MA, Steele A, Treiman A. Report of the Mars 2020 Science Definition Team. 2013:154. by the Mars Exploration Program Analysis Group (MEPAG) 〈 http://mepag.jpl.nasa.gov/reports/MEP/Mars_2020_SDT_Report_Final.pdf〉.