

Abstract
Handled artifacts are ubiquitous in human technology, but how young children engage in spatially coordinated behaviors with these artifacts is not well understood. To address this issue, children (N = 30) from 17-36 months were studied with motion tracking technology as they fit the distal segment of a handled artifact into a slot. The handle was orthogonal to the distal segment. Results revealed developmental differences in prospective control tied to the artifact's spatial structure. Although all children accomplished fitting, younger children first oriented the handle and then the distal segment (and only after the distal segment contacted the slot), whereas children by three years of age oriented the handle and distal segment simultaneously in different spatial planes, prior to the distal segment contacting the slot. Choosing an effective grip posture proved difficult for all children. Results are discussed in terms of how children begin to relate their actions to the three-dimensional spatial structure of handled objects and the prospective control of object movement in multiple spatial planes.
Keywords: fitting, handled objects, motor planning
Human technology abounds with handled artifacts. These types of tools are thought to have entered the human tool kit more than 500,000 years ago (Wilkins, Schoville, Brown, & Chazan, 2012) and were clearly adaptive. Handles extend the individual's reach, protect the hand and if used properly, enable force to be transmitted efficiently.
Handled objects, however, introduce cognitive and motor challenges for artifact users. To use handled artifacts effectively, individuals need to gear their actions to what is located at the end of the handle—that is, the functional end of the artifact and not what is immediately in hand (e.g., a hammer or a spoon). As well, individuals must take into account the spatial relation between the handle and the artifact's functional end and whether these two components lie in the same spatial plane (e.g. aligning a flat head screwdriver into the groove of the screw). When the handle and the artifact's functional end extend in different spatial planes, additional planning and control demands involving the positioning and orientation of the artifact's functional end may arise.
Developmentally, these considerations suggest that relative to non-handled objects, handled artifacts will introduce planning and control challenges for young object users, who by the end of the first year have only recently begun to adjust their hands and fingers to a non-handled object's spatial properties (Barrett & Needham, 2008; Bushnell & Boudreau, 1993; Lockman & Ashmead, 1983). In the present study, we address these planning and control challenges by investigating how children in the second and third years relate their actions to the spatial structure of handled artifacts. Specifically, we focus on how children coordinate the positioning and orientation of the major segments of a handled artifact--the handle and its functional end--during object fitting.
Spatial Demands and Handled Objects
The spatial feat of using an object or tool to act on another object or surface typically requires the coordination of two types of spatial displacements: translations and rotations. Translations refer to the movement of an object to a new location and rotations refer to a change in the orientation of the object (Landau & Spelke, 1988). During the preschool years, young children begin to integrate translations and rotations when they stack objects (Hayashi & Takeshita, 2009; Verdine et al., 2014) or fit objects into apertures (Jung, Kahrs, & Lockman, 2015; Örnkloo & von Hofsten, 2007; Shutts, Örnkloo, von Hofsten, Keen, & Spelke, 2009; Street, James, Jones, & Smith, 2011), transporting the object to its target (translation) while they orient it (rotation) with respect to that target.
When objects are attached to handles, however, the ability to coordinate translations and rotations as children carry out manual actions may be compromised. Due to the more complex spatial structure of handled relative to non-handled objects, planning and control demands associated with the use of handled objects may increase. Several lines of evidence are consistent with this idea. First, children under 14 months often experience difficulty in planning comfortable grip postures when bringing common handled tools to targets on the self. Moreover, even by 24 months, children still exhibit less than optimal performance in planning comfortable grip postures when bringing handled tools to targets located on another object, such as a puppet (McCarty, Clifton, & Collard, 2001).
Second, work with non-human primates and young children indicates that as the complexity of the dimensional structure of an object increases, so too does difficulty in orienting an object in relation to a corresponding opening (Fragaszy, Kuroshima, & Stone, 2015; Fragaszy, Stone, Scott, & Menzel, 2011). For instance, when non-human primates and two- to four-year-old children have to place objects flat into corresponding openings, they experience more difficulty with objects comprised of two joined spatial elements (e.g., a T-shaped cross bar comprised of horizontal and vertical segments) than a single one (e.g., a horizontal bar; LaCour, Stone, Hopkins, Menzel, & Fragaszy, 2014).
Additionally, at the level of the brain, single-neuron recordings indicate that specific neurons code the orientation of the axes of elongation of an object, whereas others code for the shape of the object (Sakata et al., 1998; Sakata, Tsutsui, & Taira, 2005). It is therefore likely that adding a handle to an object fundamentally alters how the brain processes an object, separating the longer handle axis from the functional end of the object, and thus introducing additional control demands when individuals engage such artifacts.
Finally, many handled objects introduce another dimension of spatial complexity for artifact users. When the handle lies in different plane relative to the object's distal end, the demands associated with the control of these artifacts in three dimensions increase. With such artifacts, individuals often have to orient the handle so that the handle and distal end of the object extend in different spatial planes. Under such circumstances, coordinating translations and rotations and anticipating comfortable grip postures may incur demands beyond those that would occur when using artifacts in which the handle and distal end lie in the same spatial plane.
The Current Study
The current study investigates how children engage handled objects for spatial action. We examine how children coordinate the translations and rotations of handled artifacts whose major segments (handle, distal end) are orthogonal to one another and thus extend in different spatial planes. To address this problem, we focused on the development of the ability to align objects with other objects or contours--a key requirement of many forms of adaptive action with objects, including tool use.
Children's performance on object alignment or fitting tasks has been studied previously in young children, but mainly with non-handled objects (Jung et al., 2015; Örnkloo & von Hofsten, 2007; Shutts et al., 2009; Street et al., 2011, but see Barrett, Davis, & Needham, 2007). Results from several studies indicate that prior to the end of the second year, children evidence difficulty in coordinating translations and rotations when fitting objects without handles into apertures. They transport an object to an aperture (a translation), but only begin to align the object with the aperture (a rotation) after the object contacts the aperture. Near the end of the second year, this two-step process is replaced by a more integrative one in which children begin to coordinate translations and rotations simultaneously before the object makes contact with the aperture (Jung et al., 2015; Örnkloo & von Hofsten, 2007; Shutts et al., 2009; Street et al., 2011). Moreover, by three years of age, children begin to align the object soon after they begin to transport it, suggesting that they have already formulated a plan for mastering the spatial demands of the problem near the outset of the task (Jung et al., 2015).
Here we examine the process by which children progressively align a handled object that possesses a more complex three-dimensional structure than the geometrically simpler shapes that are often used in fitting research (e.g., see Jung et al., 2015; Örnkloo & von Hofsten, 2007; Shutts et al., 2009; Street et al., 2011). We presented children with an object that consisted of a handle, which was attached to a rod in an inverted “T” arrangement (see Figure 1). The object was thus comprised of two principal segments that extended along different spatial planes, a three-dimensional structure that characterizes the design of many human artifacts. The task for children was to align and insert the rod (the distal segment of the object) into a tabletop slot while holding the object by its handle. In prior work, children by two years of age were able to pre-align and insert a rod without a handle into a slot (Jung et al., 2015). Due to the addition of a handle to a rod and thus the more complex three-dimensional structure of the artifact, however, we expected that even two-year-old children would experience difficulty in prospectively orienting the major axes or segments of the handled artifact during object fitting.
Figure 1.
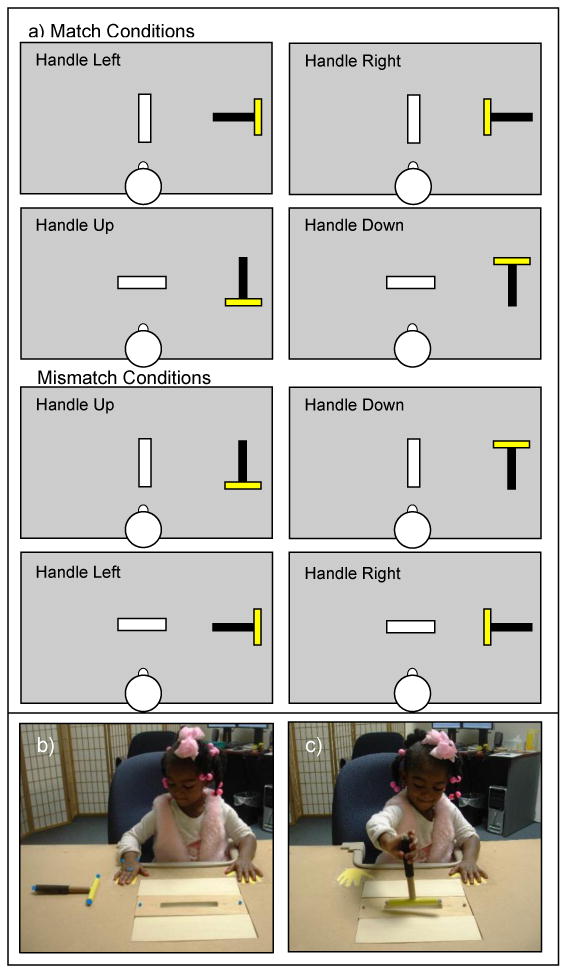
a) The eight initial positions of the handled-rod and slot presented to children in the experiment. b) The experimental setup – depicted here is a handled object with the handle on the right with a horizontal slot. Reflective markers (highlighted in blue) were placed on the 3rd metacarpal (knuckle), ulnar styloid (wrist), radial styloid (wrist), and ends of slot, rod, and handle. c) Depicted here is when the handled object approaches the slot. (The authors received signed consent for the child's likeness to be published in this article)
To pre-align the handled object, children had to steer and orient its major axes or segments (handle, rod) in three-dimensional space. To describe this process, we examined the dynamically changing orientation of the object considered with reference to its two principal segments or axes, the handle and rod. For the segment defined by the handle, we focused on its vertical orientation relative to the plane of the table surface, which corresponded to tilt (pitch) of the handle (see Figure 2a). For the segment defined by the rod, we focused on its horizontal orientation relative to that of the slot in the plane defined by the table surface (see Figure 2b). To understand the process of prospective control of handled artifacts by young children, we asked to what degree do they coordinate the orientation of these principal segments (handle, rod) in real time as they transported the entire object to the slot.
Figure 2.
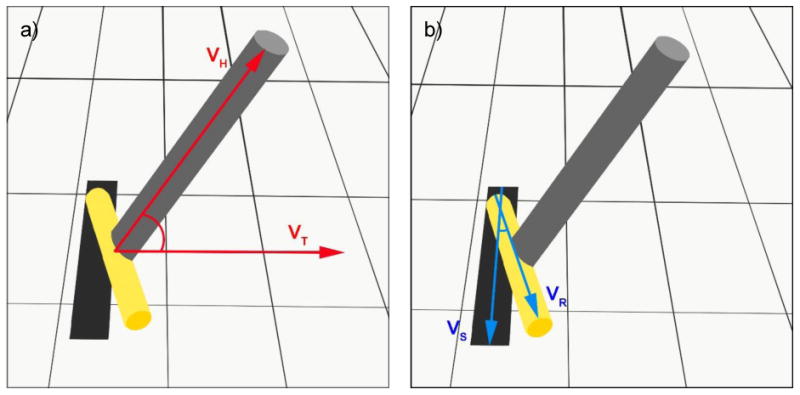
a) The vertical angle between the handle and the tabletop surface. VH is the vector of the handle. VT is the vector of the table surface. b) The horizontal angle between the rod and slot. VR is the vector of the rod. VS is the vector of the slot.
We employed motion tracking technology to chart this process of spatial coordination. Motion tracking technology enabled us to describe the process by which children changed and coordinated the orientation of each major segment of the artifact (handle and rod). In addition to our goal of describing how this three-dimensional coordination process unfolds developmentally, we expected that children would have difficulty simultaneously coordinating the orientation of the principal segments of the handled object even by two years of age--the age by which they have already begun to prospectively align and fit less complexly structured objects (e.g., rods without handles) into openings (Jung et al., 2015; Örnkloo & von Hofsten, 2007; Shutts et al., 2009; Street et al., 2011).
As additional evidence for how children prospectively control manual action, we examined the grip postures (i.e., ulnar, radial) that children employed (see McCarty et al., 2001). We asked whether radial or ulnar grip postures were associated with more or less efficient patterns of performance during this object fitting task and whether young children anticipated which grip posture would be more efficient. Although a radial overhand grip (i.e., thumb pointed toward the distal or functional end of the object) has often been associated with more effective and comfortable end-state performance in tasks involving the transport of artifacts such as spoons or hairbrushes to the self or another (McCarty et al., 2001), it is not clear whether a radial grip is always optimal in tasks involving the use of handled artifacts where the handle and functional end of the artifact lie in different spatial planes. Additionally, most research on end-state performance and grip choice with children under four years has relied on qualitative rather than quantitative judgments of efficiency, precluding definitive statements about whether one type of grip is superior to another (see Comalli et al., 2016 for a discussion of this issue). Here, we used motion tracking technology with children in the second and third years to quantify efficiency and relate it to grip posture during object fitting. More broadly, the study addressed how young children begin to master the navigational demands in manual space that are tied to the three-dimensional structure of handled artifacts, a defining feature of human technology.
Method
Participants
The sample consisted of 30 participants (10 males, 20 females) ranging from 17.3 to 36.4 months of age (527-1107 days, M = 825 days, SD = 183). Participants were recruited from local preschools and community events in a southern city in the US. Approximately 57% of the participants came from middle class Caucasian families (Caucasian = 17, African American = 4, Asian = 2, Hispanic = 2, Pacific Islander = 1, More than one race = 4). Children received a toy for their participation. An additional five toddlers (2 males, 3 females) were tested, but were excluded from the final sample due to fussiness: Two toddlers did not complete the full eight trials; two toddlers refused to wear the reflective markers and one toddler refused to do the task. The study received approval from the Tulane University Institutional Review Board [Protocol: Kinematics of Object Relational Tasks (09-00038U)].
Consistent with previously published motion tracking work in this age range on fitting, which involved similarly dense sampling of data and yielded age-related significant effects for pre-alignment (see Jung et al., 2015), we set the sample size at 30 children. Additionally, as a check, we computed power estimates from the current data for age-related effects for pre-alignment. Estimates ranged from .71-.99.
Apparatus and Design
Children were seated at a table and were presented with a rod (13.5 cm length × 2 cm diameter) attached to a 16 cm handle (see Figure 1). The rod was painted yellow and the handle was wrapped with craft foam. Two hand print stickers were affixed to the table. Children were asked to place their hands on the hand prints at the beginning of each trial. The handled rod was placed approximately 35 cm to the right of children's midline. Children were instructed to use only their right hand and were asked to fit the rod into a slot (14 cm × 2 cm × 4 cm) that was located in the middle of the table. The right hand was only used in order to reduce the number of trials required by each participant. No significant differences were found in a prior object fitting study across a similar age range where both the right and left hand were used (Jung et al., 2015).
Within the plane of the table, the slot was oriented along the left-right or front-back axis, relative to the child. In random order, the handled-rod was initially presented flat on the table in one of four facing directions (handle facing up, down, right, or left relative to the child) in combination with each slot orientation yielding a total of eight trials (Figure 1a). The slot's initial orientation was counterbalanced such that half of the children were first presented with the slot oriented along the left-right axis.
Reflective markers were placed on children's right hand, the handled rod, and slot to track movements of the hand and object relative to the slot. Double-sided hypoallergenic tape was used to secure the markers to the child's middle knuckle (3rd metacarpal) and both sides of the wrist (radial styloid and ulnar styloid). In addition, two markers were glued on the end of the rod and one on the end of the handle. Finally, two markers were affixed to the ends of the slot (see Figure 1b). The fitting tasks were filmed at 240 Hz using a 3D optical motion capture system (Qualisys) involving eight infrared cameras (ProReflex MCU 240) positioned in a semicircle around the front of the table. An external trigger was used to start and stop recording between trials. Trials were filmed at 30 Hz with a video camera (Hi8 SONY Handycam) to record children's behavior.
Procedure
Children sat in a chair or on their parent's lap at a table with the slot in front of them. The handled object was initially presented on the right side of the children, approximately 35 cm away from the center of the slot. The children were asked, “Can you hide the yellow part in the hole?” Each trial started when the children reached for the object using their right hand. If they reached with their left hand, the experimenter asked them to place their left hand back on the hand print, and they were encouraged to start over using their right hand. (Children tried to use their left hand on only 10 out of 240 trials.) The trial ended when children placed the rod in the slot or when they released the object from their hand.
Handedness
Handedness was assessed using the Edinburgh Handedness Inventory (Oldfield, 1971). Before testing started, parents reported which hand their child used for a variety of tasks. Scores ranged from -2 for “Always Left” to +2 for “Always Right.” The mean score across items for our sample was 0.85. Twenty-seven children had mean scores higher than zero, indicating a right hand preference. Two children had mean scores of zero, indicating that the use both hands equally often. One child had a mean score less than zero, indicating a left hand preference. The results reported in this study include the entire sample. (The same significant effects were obtained when the sample only included the right-handed children.)
Data Reduction and Scoring
We considered two issues with regard to how children gripped the object. First, we examined whether children use a precision grip, grasping the handle with their fingers, or whether they grasp the handle in their palm in a power grip. Second, we asked if children use a radial (i.e., thumb oriented toward the rod) or ulnar (i.e., thumb oriented toward the top of the handle) grip. Children did not change their grips throughout a given trial. The average kappa for two independent observers who coded 20% of the entire sample for grip patterns was .923.
The markers for the motion tracking analyses were first identified using the Qualisys Track Manager and then exported to MATLAB for subsequent processing. Missing data points from the trajectories were interpolated with a cubic spline function for all gaps that were less than .1 seconds (24 frames). After interpolating gaps in the trajectories, data were then smoothed to reduce measurement error using a least squares spline.
Results
The results are organized into four sections. First, we establish whether children were able to understand and perform our task (Success). Then we address the dynamic process by which children solved the task, following the temporal sequence of the trial. We begin by discussing how children grasped the object (Grip), then transported it to the slot (Transport Phase) and lastly how they inserted the rod (Fitting Phase; see Figure 1c). Phases were determined by examining motion tracking data in Qualisys Track Manager. The Pearson's r for two independent observers who coded 20% of the entire sample for the beginning and ending frame number of each phase was .99. All analyses were done in R (R Core Team, 2013) using the geepack (Hojsgaard, Halekoh, & Yan, 2006) and nlme (Pinheiro & Bates, 2000) libraries. General Estimating Equations (GEE) analyses (see Hardin & Hilbe, 2012) use the chi square distribution to test statistical significance of parameters. GEE are an extension of generalized linear models, which accounts for non-normally distributed, correlated data and allows for repeated measures. Because we analyzed age as a continuous variable and many of our dependent variables were not normally distributed, GEE analyses were well-suited to this study design. Due to the relatively low number of male participants in the study, we were not able to analyze for sex differences reliably.
Success
Children of all ages were able to complete the task successfully. They fit the rod into the slot on 233 out of 240 trials. The seven trials in which children did not succeed stemmed from four different children who were all under two years of age. Furthermore, on all seven failed trials, children used radial grips (i.e., thumb oriented toward the rod), but they never failed to fit the object if they used an ulnar grip (i.e., thumb oriented toward the top of the handle).
Grip
All children gripped the object by its handle. Children used a power grip on 229 out of 240 trials. (The 11 trials in which children used a precision grip originated from 6 different children.) Out of the 240 total trials, children gripped the object using a radial grip 130 times and an ulnar grip on 110 trials.
Use of a radial or ulnar grip varied jointly as a function of age and the direction the handle faced when the object was initially presented (handle direction; see Figure 1a). When we regressed grip (radial = 1, ulnar = 0) onto age and handle direction (i.e., up, down, left or right), the results revealed significant main effects of age (χ21 = 3.9, p = .049) and handle direction (χ21 = 50.1, p < .001), which were qualified by an Age × Handle Direction interaction (χ21 = 8.4, p = .038). As can be seen in Figure 3, children showed markedly different grip preferences depending on the initial direction of the handle. The youngest children tended to grip the object in the simplest way for picking up the handle. This resulted in a radial grip when the handle initially faced right or down, and an ulnar grip when the handle initially faced up or left. In contrast, with increasing age, children were more likely to use a radial grip in three of the four handle direction conditions. In other words, as children became older, they were more likely to grip the object in a conventional tool-like fashion. Inspection of the slopes in Figure 3 reveals that this change with age occurred primarily when the handle was initially facing left (p = .005 for change in slope for the left initial hand direction; ps > .17 for other initial handle direction). Use of the radial grip when the handle initially faced right or down was near ceiling levels at all ages, but near floor levels when the handle initially faced up, where use of a radial grip with an overhand posture would have proved awkward.
Figure 3.
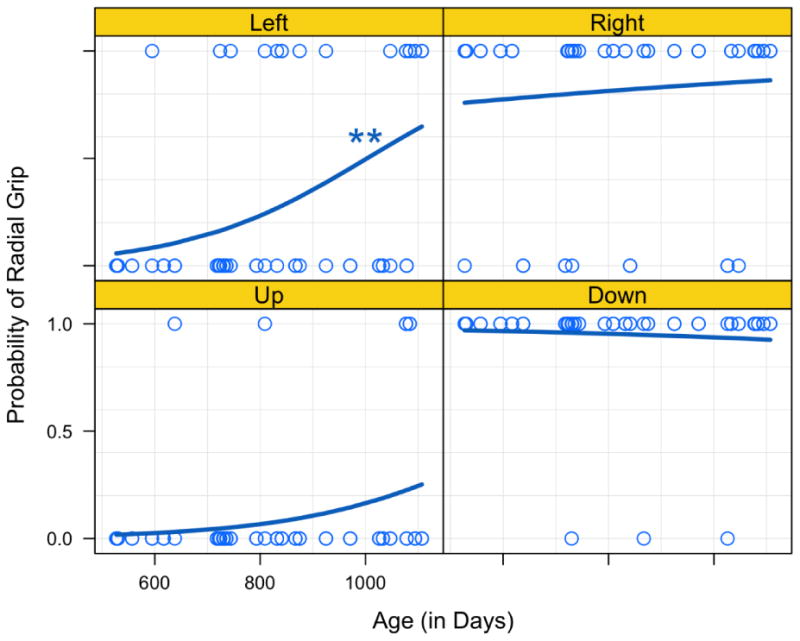
Depicted are the grips that children used (Radial = 1, Ulnar = 0) on individual trials in each of the four initial handle directions (Left, Right, Up, Down). Although there is a general trend across initial handle positions for older children to use a radial grip more frequently, only the slope in the “Left” facing position is in itself significant. (* p < .05, ** p < .01)
Transport Phase
We next examine the transport phase, defined as the period between when the child first grasped the object and the point at which the object contacted the slot. (Slot contact was defined as the first point at which any part of the rod overlapped and was coincident with the open space within the slot. See Figure 2b.) The following analyses each consist of two parts. We initially consider whether children appropriately oriented the rod by the time it first contacted the slot. Next, we more closely examine the process of transport, employing the dense data afforded by motion tracking technology. We analyze the entire time-series from grasp to the object's first contact with the slot in terms of handle orientation (angle of the handle with respect to the plane of the table surface, perpendicular is 90°, see Figure 2a) and rod orientation (angle of the rod relative to the slot, fully aligned is 0°, see Figure 2b).
The time-series analyses were conducted using generalized least squares and include covariance matrices to eliminate autocorrelation for each trial and weights to account for heteroscedasticity both as a function of time and as a function of age. As described in the prior section, the initial direction that the handle faced and the grip that children used were highly correlated. Because grip would have more functional significance for any actions that children undertook with the object, we included grip in the following analyses, but not the initial direction that the handle faced.
Time
Children across age took a similar amount of time to transport the object to the slot. Using a mixed-effects model, we regressed the duration of the transport phase onto age and grip. Results revealed no significant effects (ps > .32). Children across age took on average 1.61 seconds (SD = 1.21 s) from the time they grasped the handle until the rod first contacted the slot.
Angle of the handle relative to the table
At point of contact
We next considered the angle of the handle in relation to the table at the point when the rod first contacted the slot (see Figure 2a). Kinematic data were incomplete on 8 out of 240 trials; those trials were excluded from the following analyses. We regressed the angle between the handle and the table surface onto age and grip. The GEE model assumed a Gamma distribution for the data and used an identity link function. Handle angle at the point of first contact with the slot varied as a function of both age (χ21 = 5.87, p = .015, see Figure 4) and grip (χ21 = 20.48, p < .001, see Figure 5). As can be seen in Figure 4, with increasing age, children orient the handle more perpendicularly relative to the table at the point of first contact with the slot and evidence more consistency across trials in how they orient the handle. Additionally, across age, children orient the handle more perpendicularly to the table when using an ulnar than radial grip (see Figure 5).
Figure 4.
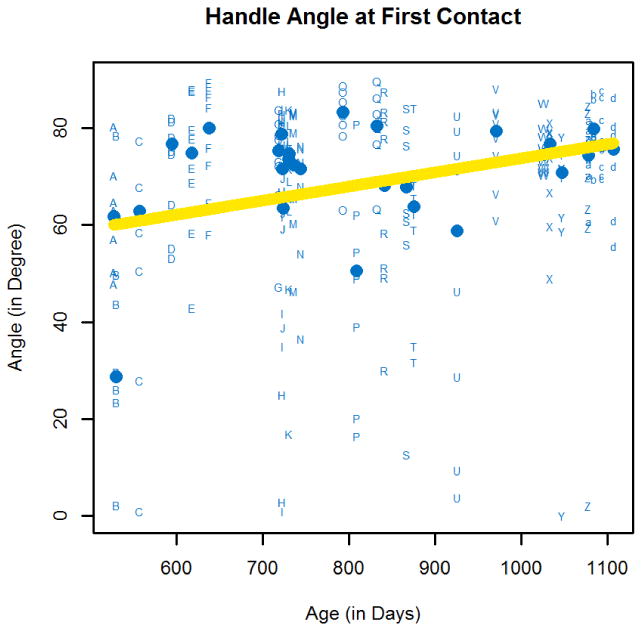
The data represent the angle between the handle of the object and the table surface. The individual trials for each child are shown using letters. Each letter refers to the data from a given child. Upper case letters are assigned in order of age at testing and switch to lower case after the 26th youngest child. “A” thus refers the youngest and “a” to the 27th youngest child. The average angle across all trials for each child is also shown (•), as is the estimated average as a function of age, when controlling for grip, from the GEE model (yellow line).
Figure 5.
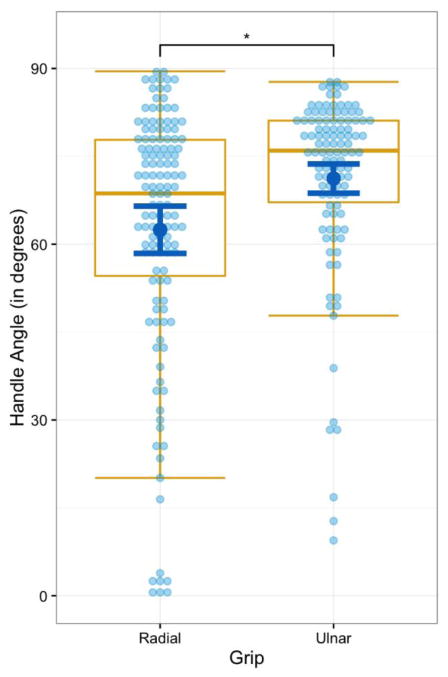
The data represent the angle between the handle of the object and the table surface. The group average (•) and the standard error of the mean (blue error bars) from the GEE model are shown for the radial and ulnar grip. The data are also shown as a box-and-whiskers plot (gold lines), representing the quartiles of the data and as a dot plot (light-blue dots), further illustrating the distribution of the data within each grip condition.
Handle angle throughout transport
To describe the process by which children oriented the handle during the transport phase, we used Generalized Least Squares (GLS) to model the angle of the handle to the table surface (see Figure 2a) throughout the entire transport phase as a function of age and grip. GLS is computationally intensive. We therefore chose to down-sample the trajectory: instead of analyzing the exact position at each standardized time point 1-100, we sampled every 5th data point (5, 10… 95,100). We also included terms to control for correlated errors and unequal variances. We modeled time as a polynomial of the 3rd degree; the most relevant statistic is the combined improvement of model fit, rather than the contribution of each piece (linear, quadratic, and cubic) of the polynomial. Results showed significant effects of time (F3, 3411 = 144.70, p < .001, see Figure 6). Children at all ages turned the handle more perpendicularly to the table surface as they approached the slot.
Figure 6.
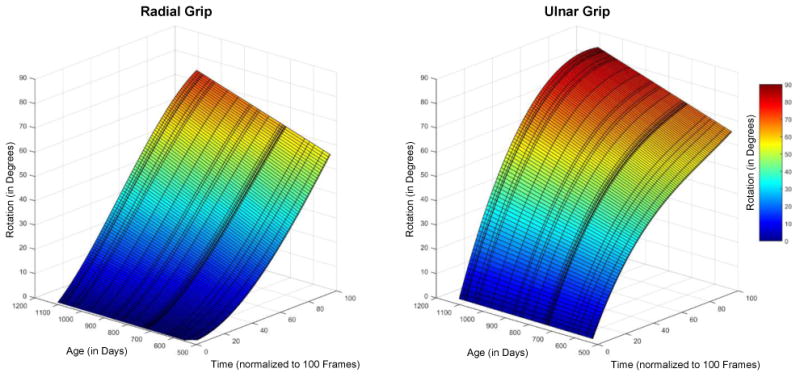
Depicted is the estimated angle between the handle of the object and the table surface throughout the entire transport phase (time data are normalized to 100 frames) for all children. The color scale corresponds to the value of the angle and thus complements the value on the angle axis. Every trial starts with the handle parallel to the table (0°-dark blue). See the online article for the color version of this figure.
The results also revealed significant interactions between Age × Time (F3, 3411 = 19.53, p < .001) and Time × Grip (F3, 3411 = 63.51, p < .001), indicating that both age and grip pattern influenced when children begin to prospectively orient the handle as they transport it. Inspection of Figure 6 indicates that as children become older, they begin orienting the handle earlier in the transport phase, culminating in a near perpendicular angle by the time the object first contacts the opening. Likewise, grip pattern also influenced when children began to orient the handle during transport. Children began to orient the handle perpendicularly near the beginning of the transport phase when using an ulnar grip, but did so considerably later during transport when using a radial grip (see Figure 6).
Rod angle relative to the slot at point of contact
To determine whether children had pre-aligned the rod with the slot at the point of contact, we next considered the orientation of the rod defined as the angle formed between the slot and the projection of the rod onto the table surface (see Figure 2b). For rod orientation, we examined the first point of contact between rod and slot and regressed this angle onto age and grip using GEE. Because changes in this angle become exaggerated in cases where the rod is not sufficiently parallel to the table (see Jung et al., 2015), trials with the rod elevated more than 45° were excluded (10 out of 240 trials) from the following analyses. The results indicate that with increasing age, children showed closer alignment of the rod with respect to the slot by the time the rod first contacted the slot (main effect of age; χ21 = 29.4, p < .001). No effect associated with grip was found (p = .67). Many of the children who appear to perform near chance levels (i.e., with misalignments at the initial point of contact around 45°, see Figure 7) are under 750 days. Furthermore, up until 900 days of age, children still have many trials where they fail to align the object properly, and even the oldest children fail to do so in several instances.
Figure 7.
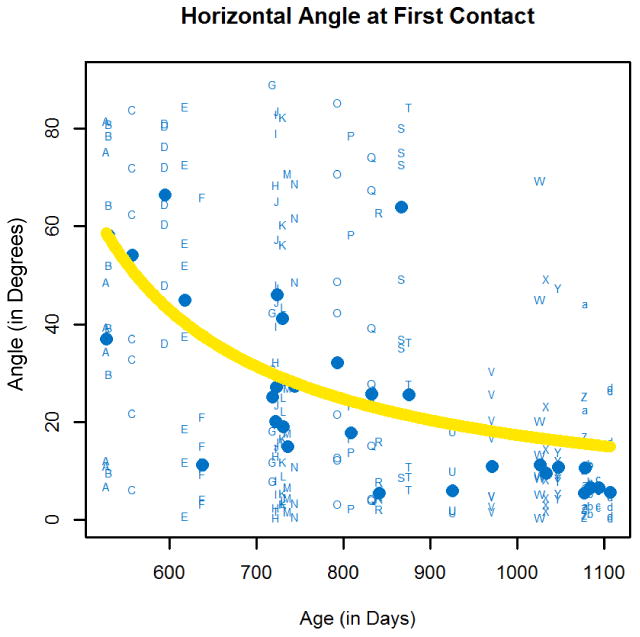
Depicted is the angle between the object and the slot in the horizontal plane at the time of contact. Participants are labeled as before using letters in order of age and repeating in lower case after the 26th child. The average angle across all trials for each child are also shown (•), as is the estimated average as a function of age from the GEE model (yellow line).
Why do so many of the young children seem to be performing inaccurately and/or near chance levels? Are they performing in a systematic, but inaccurate manner or randomly? One way to address this issue is to compare their performance across all eight trials to chance. Children who are systematically attempting some form of prospective control should have data points clustered around an average, whereas those performing unsystematically would have no such clustering and show an evenly distributed set of values along the possible range of angles (0-90°). To test whether each child's data were random (i.e., not systematic) across the eight trials, we used the Kolmogorov-Smirnov test, employing a uniform distribution. The p-values associated with the test represent the probability that each child's data are uniformly distributed. The results are seen in Figure 8. Many of the children in the upper age range of the study show significant departures from random responding (p < .05, see Participants T-b on the y-axis in Figure 8). However, many of the children in the lower age range of the study (see Participants C-S on the y-axis in Figure 8) are orienting the rod randomly (p > .50) indicating no prospective control with respect to the slot. Interestingly, one younger child (Participant D) was systematically incorrect, showing near perpendicular angles relative to the slot, rather than parallel ones.
Figure 8.
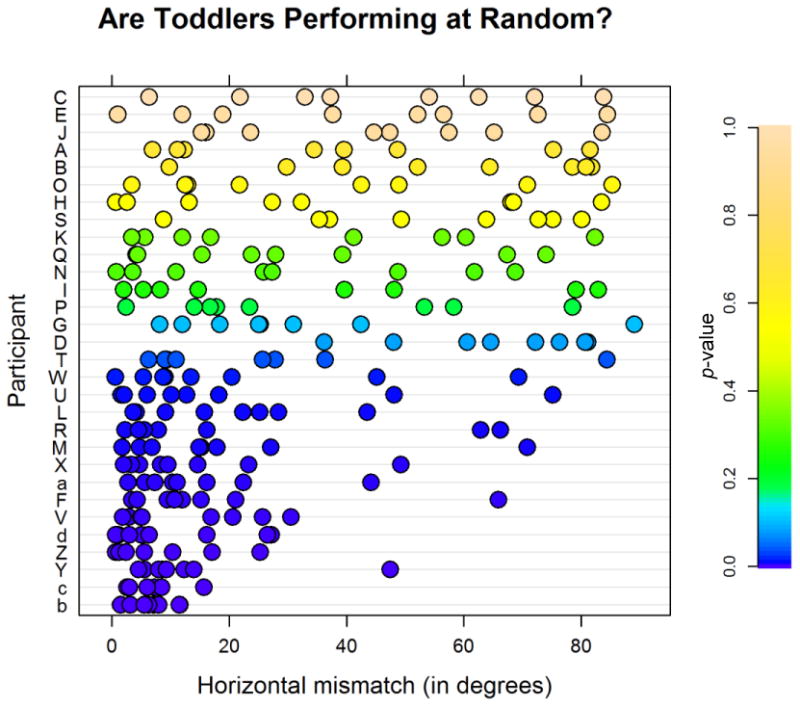
Shows all eight trials from each of the children; each child's data are graphed on a horizontal line. Children are ordered on the y-axis according to the p-values from the Kolmogorov-Smirnov test, starting with the highest (and thus most likely to have stemmed from a uniform distribution) to the lowest. Data are also color coded according to the p-values (see color scale). Participants are labeled as before using letters in order of age and repeating in lower case after the 26th child. See the online article for the color version of this figure.
Rod angle throughout the transport phase
We next considered the process by which children attempted to orient the rod as they transported the entire object to the slot. We used Generalized Least Squares (GLS) to model the angle of the rod with respect to the slot throughout the entire transport phase as a function of age and grip. As before, we down-sampled the trajectory to every 5th data point and included terms to control for correlated errors and unequal variances. We again modeled time as a polynomial of the 3rd degree. We ran separate analyses for the match and mismatch conditions because the angle at the starting points is different. Overall, the results revealed that with increasing age, children pre-aligned the rod with the slot during the second half of the transport phase. GLS analyses confirmed these findings, yielding significant effects of time both in the match (F3, 3406 = 29.42, p < .001) and mismatch conditions (F3, 3406 = 21.21, p < .001). Results further show a significant Age × Time interaction both in the match (F3, 3406 = 10.54, p < .001) and mismatch conditions (F3, 3406 = 12.29, p < .001). Adding grip to the model did not significantly improve model fit (p = .21). The trajectories can be seen in Figure 9. Two findings are particularly noteworthy. First, in the first half of the transport phase, children across age fail to keep the initial alignment of the rod and the slot. Second, with increasing age, children successfully align the rod with the slot in the second half of the transport phase.
Figure 9.
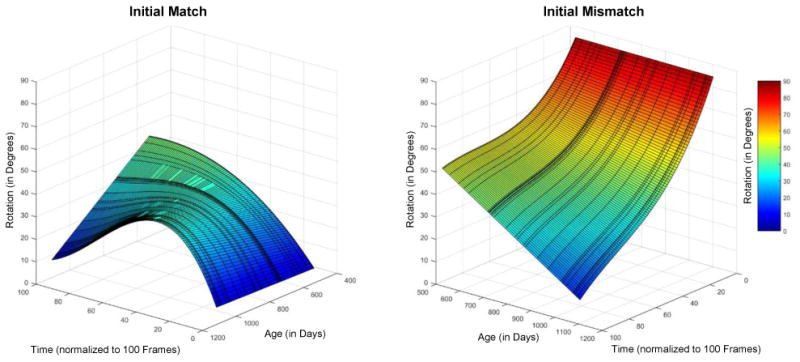
Depicted is the estimated angle between the rod and the slot in the horizontal plane throughout the entire transport phase (time data are normalized to 100 frames) for all children. Because matching trials start with a 0° angle and mismatch trials with 90° these were plotted separately in (a) and (b) respectively. Note that the due to the difference in starting positions the viewing angle for the two conditions are rotated by one turn, the result is that age and time are on different axes in the two graphs. See the online article for the color version of this figure.
Fitting Phase
We next considered how long it took children to fit the rod in the slot once the rod had contacted the slot. Children successfully fit the rod into the slot on 233 out of the 240 trials. In all but seven instances, the time between making contact with the slot and the successful completion of the trial was 10 seconds or less. In these seven cases (six of which stem from the very youngest children) the time required to fit the rod was between 15-28 seconds. We adopted the conservative strategy of excluding these seven outliers from the following analyses.
We ran a GLS model to regress the amount of time between first contact and successful fitting onto age and the angle at contact between the rod and slot in three dimensions. Results revealed significant main effects of age (χ21 = 9.02, p = .003) and the angle at contact (χ21 = 42.13, p < .001), which were qualified by a significant interaction of Age × Angle at Contact (χ21 = 6.19, p = .013). Following procedures described by Aiken and West (1991), the interaction between age and angle at contact was plotted for illustration purposes using low, middle, and high values for age. Not surprisingly, as can be seen in Figure 10, children of all ages needed longer to fit the rod if the angle at contact increased. However, with increasing age, children take less time to align and fit the rod if the initial angle at contact is large. In contrast, if the object was closely aligned at contact, children of all ages fared virtually the same.
Figure 10.
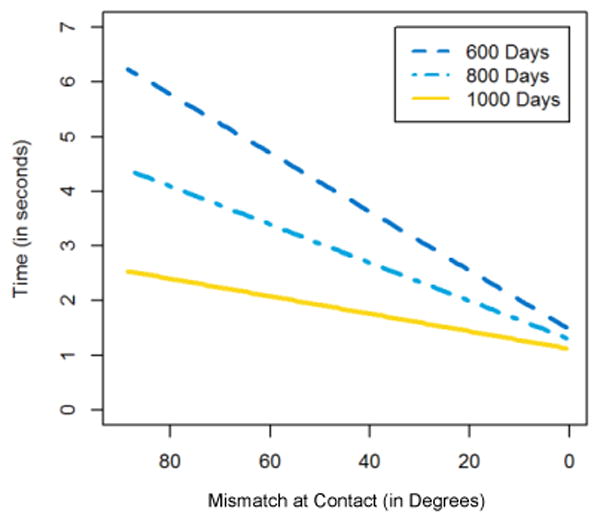
Plotted are the predicted means of the time to fit the rod into the slot based on age and the degrees (0-90°) of mismatch at contact.
Discussion
Handled objects confer considerable advantages but pose potential implementation challenges for artifact users. The major segments of handled artifacts often extend in more than one spatial plane, requiring that individuals coordinate the orientation of these segments prospectively to perform goal-directed actions efficiently. To investigate how young children solve this spatial coordination problem, we studied object fitting with motion tracking technology. Our results revealed marked developmental differences in the process by which children between 17 and 36 orient the major segments of a handled artifact during object fitting. Over this developmental period, children's actions become more integrated with the spatial structure of the handled artifact. We consider these developmental changes with respect to the dynamics of spatial coordination and the prospective control of action, and grip selection in more detail below.
Prospective Control of Action: Spatial coordination
Use of motion tracking technology afforded us insight into developmental changes in prospective control as children transported a handled object and fit its distal end into a tabletop slot. The handled object was comprised of two principal segments (handle and rod), which extended in two different spatial planes during the act of fitting. To transport and fit the distal end of the object into a tabletop slot, children had to orient the major segments of the object in different planes of action: They had to control the orientation of the handle with respect to the table as they simultaneously or subsequently controlled the orientation of the rod with respect to the opening.
Developmental changes were clearly evident in how children guided the object in relation to its spatial structure. Younger children focused initially on the orientation of the handle relative to the plane of the table. They oriented the handle relatively early in the transport phase, but only began to focus on the orientation of the rod relative to the opening after the rod had contacted the opening. In contrast, with increasing age, children oriented the principal axes (handle, rod) of the object in different spatial planes simultaneously. Thus as age increased, children adopted a more integrative spatial strategy.
It is notable that the addition of a handle to an object compromises young children's ability to prospectively control the object's overall orientation. In the present study, although the youngest children (17 months) showed prospective adjustments for the tilt of the handle relative to the table, it was not until approximately 30 months (900 days) onward that children on average pre-aligned the rod with the slot (see Figure 7). In contrast, when children perform a similar fitting task with a rod without a handle, they prospectively align the rod with a slot before 24 months (Jung et al., 2015).
Why does the addition of a handle to the rod delay the advent of prospective alignment of the rod with respect to the slot by roughly a half-year? We propose that the addition of a handle to a rod challenges young children's ability to engage in spatially coordinated action because the resulting composite object is comprised of segments that lie in different spatial planes, which in turn requires prospective control in different planes of action. To control both the orientation of the handle relative to the table and the orientation of the rod relative to the slot once they lift the object from the table, children must recognize at some level how the movement of the handheld segment of the object (the handle) induces movement of the distal segment of the object (the rod) in another spatial plane. Closer inspection of the motion tracking trajectories indicated developmental differences in how children approached this navigational challenge. With increasing age, children began to orient the distal segment of the object near the midpoint of the transport phase.
Collectively, our findings suggest that young children have difficulty in guiding the movement of the object when they must steer and orient the object's principal segments simultaneously in different spatial planes. This difficulty may reflect a more general limitation in young children's spatial processing abilities. Coordinating spatial information across multiple planes of action may tax young children's ability to control action prospectively. Consistent with this idea, two- and three-year-old children often encounter problems when copying three-dimensional block constructions that extend in different spatial planes (Verdine et al., 2014) and when fitting irregularly shaped objects into apertures (Fragaszy et al., 2015).
The Role of Variability
Our results also hint at a path by which younger children may learn to coordinate the orientation of the handled object's principal segments as they maneuver the object through space. Although the younger children on average initially placed the object's distal segment on the slot randomly, within-participant variability was high (see Figure 8). Such within-participant variability, however, may offer a context for learning (Comalli et al., 2016; Siegler, 1996). On the assumption that children are able to register at some level whether an action is efficient and the costs associated with inefficient actions--an assumption that characterizes many theories of adult skill learning (Engelbrecht, 2001), children's everyday efforts at aligning distal segments of objects with other objects or openings, although often initially random, may improve over time as they increasingly use artifacts and glean the results of their efforts. At the same time, these kinds of efforts when successful might also direct children's attention to an object's axis of elongation or in the case of some handled artifacts, their principal segments or axes. Attention to these axes may highlight the need to plan actions with respect to them (Smith, Street, Jones, & James, 2014).
Grip Selection
Selection of an effective grip posture also proved challenging for children. As noted, we classified grips as power or precision grips. Within each of these grip types, we coded if the thumb or side of the hand opposite the thumb was oriented toward the object's functional end (i.e., radial or ulnar posture, respectively). In the present study, most children used overhand power grips. Additionally, children's use of radial grips was either high or increased with age in all but one of the initial handle direction conditions (up), where grasping the handle with an overhand radial grip would have been awkward.
Yet it is also important to note that in the present study, children were more effective in controlling the tilt of the handle (i.e., orienting the handle relatively orthogonally to the tabletop) when they employed an ulnar grip. No advantage of either grip posture (radial, ulnar) was evident when children attempted to control the horizontal orientation of the rod relative to the slot. By comparison, in other task contexts when children bring a tool to a part of the body (McCarty et al., 2001) or when they relate a tool to an external target (Comalli et al., 2016), end-state comfort and effective performance have often been associated with use of a radial grip. Although the radial grip is an effective and comfortable one in many tool using situations, the effectiveness and comfort of a particular grip posture are likely due to an interaction of a number of biomechanical and task demands (Jovanovic & Schwarzer, 2011; Wunsch, Henning, Aschersleben, & Weigelt, 2013). In the present study, motion tracking analyses enabled us to show that the ulnar grip proved either more or as effective as the radial grip for aligning the different axes of the object relative to the opening. Additionally, based on our own experience performing the current task, the ulnar grip involved less twisting of the arm and more end-state comfort during fitting.
To follow up on these observations, we tested an additional group of 10 right-handed adults, presenting them with the same task as in the current study and recorded the grips that they used. Two main findings emerged. First, relative to the children in the present study, adults showed a more differentiated and complex strategy of grip selection within a given trial. Sometimes, they would initially grasp the handle radially, then immediately swivel the object and pivot to an ulnar grip to perform the fitting portion of the task (45% of trials). In contrast, children never exhibited this radial-to-ulnar shift. Second, and of most relevance to the present discussion, adults held the handle with an ulnar grip on a majority of trials within a condition when performing the fitting portion of the task (60-85% of trials per condition, see Supplementary Table 1).
The current and prior findings (Rosenbaum, van Heugten, & Caldwell, 1996) suggest that adults select grips flexibly, based on end-state comfort and the demands of the task. Despite the increased comfort of the ulnar grip, younger children in the present study generally did not take into account end-state comfort and effectiveness when selecting a grip. They initially grasped the handle in the most immediately convenient way in each orientation condition, but did not subsequently change grips. With increasing age, children began to use the radial grip consistently, which is the most conventional way to hold a handled object or tool. However, use of the radial grip in the present task, if anything, impeded end-state comfort. One possibility suggested by these results is that even by three years of age, children have not yet fully differentiated the task conditions that are best served by different grip postures, especially when they engage objects whose principal axes extend in more than one spatial plane. In other task contexts, such as hammering, end-state comfort performance is not fully established until 12 years of age (Comalli et al., 2016). More generally, planning for end-state comfort and effective use might require more advanced spatial visualization or mental rotation skills, an ability that is continuing to develop between 3 to 5 years of age (Frick, Hansen, & Newcombe, 2013) and likely afterwards.
Conclusions
Handled artifacts are a ubiquitous feature of human technology. To deploy these objects effectively, individuals need to gear their actions to their spatial structure, particularly the orientation of these objects' major segments in different planes of action. The present findings reveal that by three years of age, children can quickly accomplish this feat of spatial coordination: Over the course of just a few seconds, as children transport a handled artifact to an opening, they simultaneously control the orientation of the handle and attached rod, adjusting the orientation of the handle relative to the table, while adjusting the orientation of the rod relative to the opening. By contrast, two-year-old children frequently show more limited prospective control of action, adjusting the orientation of one major segment (handle, rod) of the artifact at a time. Nevertheless, under the present task conditions, children by three years of age do not consistently select the most effective grip posture to accomplish fitting. More broadly, our findings with motion tracking technology help to illuminate how young children are becoming more effective navigators of handled objects in three-dimensional space, a skill that is crucial for adaptive action in our artifact rich world.
Supplementary Material
Acknowledgments
We thank all the children and parents who participated in the research. This research was supported in part by National Institutes of Health Awards 5R01HD043842 and 5R01HD067581 and the Tulane Flowerree Summer Research Award.
Footnotes
Some of the data were in poster presentations at the biennial meetings of the Cognitive Development Society (2013), the International Congress on Infant Studies (2012), and the Society for Research in Child Development (2011, 2013).
Contributor Information
Wendy P. Jung, Department of Psychology, Tulane University
Björn A. Kahrs, Department of Psychology, Tulane University
Jeffrey J. Lockman, Department of Psychology, Tulane University
References
- Aiken LS, West SG. Multiple regression: Testing and interpreting interactions. Newbury Park, CA: Sage Publications; 1991. [Google Scholar]
- Barrett TM, Davis EF, Needham A. Learning about tools in infancy. Developmental Psychology. 2007;43:352–368. doi: 10.1037/0012-1649.43.2.352. [DOI] [PubMed] [Google Scholar]
- Barrett TM, Needham A. Developmental differences in infants' use of an object's shape to grasp it securely. Developmental Psychobiology. 2008;50:97–106. doi: 10.1002/dev.20280. [DOI] [PubMed] [Google Scholar]
- Bushnell EW, Boudreau JP. Motor development and the mind: The potential role of motor abilities as a determinant of aspects of perceptual development. Child Development. 1993;64:1005–1021. doi: 10.2307/1131323. [DOI] [PubMed] [Google Scholar]
- Comalli DM, Keen R, Abraham ES, Foo VJ, Lee M, Adolph KE. The development of tool use: Planning for end-state comfort. Developmental Psychology. 2016;52:1878–1892. doi: 10.1037/dev0000207. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Engelbrecht SE. Minimum principles in motor control. Journal of Mathematical Psychology. 2001;45:497–542. doi: 10.1006/jmps.2000.1295. [DOI] [PubMed] [Google Scholar]
- Fragaszy DM, Kuroshima H, Stone BW. “Vision for Action” in young children aligning multi-featured objects: Development and comparison with nonhuman primates. PLoS ONE. 2015;10:1–21. doi: 10.1371/journal.pone.0140033.. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Fragaszy DM, Stone BW, Scott NM, Menzel C. How tufted capuchin monkeys (Cebus apella spp) and common chimpanzees (Pan troglodytes) align objects to surfaces: insights into spatial reasoning and implications for tool use. American Journal of Primatology. 2011;73:1012–30. doi: 10.1002/ajp.20966. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Frick A, Hansen M, Newcombe NS. Development of mental rotation in 3- to 5-year-old children. Cognitive Development. 2013;28:386–399. doi: 10.1016/j.cogdev.2013.06.002. [DOI] [Google Scholar]
- Hardin JW, Hilbe JM. Generalized estimating equations. Boca Raton, FL: CRC Press; 2012. [Google Scholar]
- Hayashi M, Takeshita H. Stacking of irregularly shaped blocks in chimpanzees (Pan troglodytes) and young humans (Homo sapiens) Animal Cognition. 2009;12:S49–S58. doi: 10.1007/s10071-009-0273-5. [DOI] [PubMed] [Google Scholar]
- Hojsgaard S, Halekoh U, Yan J. The R Package geepack for Generalized Estimating Equations. Journal of Statistical Software. 2006;15:1–11. [Google Scholar]
- Jovanovic B, Schwarzer G. Learning to grasp efficiently: The development of motor planning and the role of observational learning. Vision Research. 2011;51:945–954. doi: 10.1016/j.visres.2010.12.003. [DOI] [PubMed] [Google Scholar]
- Jung WP, Kahrs BA, Lockman JJ. Manual action, fitting, and spatial planning: Relating objects by young children. Cognition. 2015;134:128–139. doi: 10.1016/j.cognition.2014.09.004. [DOI] [PMC free article] [PubMed] [Google Scholar]
- La Cour LT, Stone BW, Hopkins W, Menzel C, Fragaszy DM. What limits tool use in nonhuman primates? Insights from tufted capuchin monkeys (Sapajus spp.) and chimpanzees (Pan troglodytes) aligning three-dimensional objects to a surface. Animal Cognition. 2013 doi: 10.1007/s10071-013-0643-x. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Landau B, Spelke E. Geometric complexity and object search in infancy. Developmental Psychology. 1988;24:512. doi: 10.1037/0012-1649.24.4.512. [DOI] [Google Scholar]
- Lockman JJ, Ashmead DH. Asynchronies in the development of manual behavior. In: Lipsitt LP, editor. Advances in infancy research. Vol. 2. Norwood, NJ: Ablex; 1983. pp. 113–136. [Google Scholar]
- McCarty ME, Clifton RK, Collard RR. The beginnings of tool use by infants and toddlers. Infancy. 2001;2:233–256. doi: 10.1207/S15327078IN0202_8. [DOI] [Google Scholar]
- Oldfield RC. The assessment and analysis of handedness: The Edinburgh inventory. Neuropsychologica. 1971;9:97–113. doi: 10.1016/0028-3932(71)90067-4. [DOI] [PubMed] [Google Scholar]
- Örnkloo H, von Hofsten C. Fitting Objects Into Holes: On the Development of Spatial Cognition Skills. Developmental Psychology. 2007;43:404–416. doi: 10.1037/0012-1649.43.2.404. [DOI] [PubMed] [Google Scholar]
- Pinheiro JC, Bates DM. Mixed-Effects Models in S and S-PLUS. New York: Springer Verlag; 2000. [DOI] [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing 2013 [Google Scholar]
- Rosenbaum DA, van Heugten CM, Caldwell GE. From cognition to biomechanics and back: The end-state comfort effect and the middle-is-faster effect. Acta Psychologica. 1996;94:59–85. doi: 10.1016/0001-6918(95)00062-3. [DOI] [PubMed] [Google Scholar]
- Sakata H, Taira M, Kusunoki M, Murata A, Tanaka Y, Tsutsui KI. Neural coding of 3D features of objects for hand action in the parietal cortex of the monkey. Philosophical Transactions of the Royal Society of London B: Biological Sciences. 1998;353:1363–1373. doi: 10.1098/rstb.1998.0290. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Sakata H, Tsutsui KI, Taira M. Toward an understanding of the neural processing for 3D shape perception. Neuropsychologia. 2005;43:151–161. doi: 10.1016/j.neuropsychologia.2004.11.003. [DOI] [PubMed] [Google Scholar]
- Shutts K, Ornkloo H, von Hofsten C, Keen R, Spelke ES. Young children's representations of spatial and functional relations between objects. Child Development. 2009;80:1612–27. doi: 10.1111/j.1467-8624.2009.01357.x. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Siegler RS. Emerging minds: The process of change in children's thinking. New York: Oxford University Press; 1996. [Google Scholar]
- Smith LB, Street S, Jones SS, James KH. Using the axis of elongation to align shapes: Developmental changes between 18 and 24 months of age. Journal of Experimental Child Psychology. 2014;123:15–35. doi: 10.1016/j.jecp.2014.01.009. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Street SY, James KH, Jones SS, Smith LB. Vision for action in toddlers: the posting task. Child Development. 2011;82:2083–94. doi: 10.1111/j.1467-8624.2011.01655.x. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Verdine BN, Golinkoff RM, Hirsh-Pasek K, Newcombe NS, Filipowicz AT, Chang A. Deconstructing building blocks: Preschoolers' spatial assembly performance relates to early mathematics skills. Child Development. 2014;85:1062–1076. doi: 10.1111/cdev.12165. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Wilkins J, Schoville BJ, Brown KS, Chazan M. Evidence for early hafted hunting technology. Science. 2012;338:942–946. doi: 10.1126/science.1227608. [DOI] [PubMed] [Google Scholar]
- Wunsch K, Henning A, Aschersleben G, Weigelt M. A systematic review of the end-state comfort effect in normally developing children and in children with developmental disorders. Journal of Motor Learning and Development. 2013;1:59–76. doi: 10.1123/jmld.1.3.59. [DOI] [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.