

Summary
Older drivers are frequently involved in collisions at intersections. One reason may be inadequate head and eye scanning when approaching the intersection. Prior driving simulator research on scanning at intersections has employed two main methods to guide subjects through the simulated world: auditory instructions similar to GPS navigation and following a lead vehicle. However, these two methods may have differing effects on head and eye scanning behaviors. We therefore conducted a pilot study to assess the effects of guidance method on participants’ head and eye movements as well as their detection of motorcycle hazards at intersections. Detection rates were significantly higher when following a lead vehicle than when following GPS instructions, but participants were closer to the intersection when they responded. Preliminary examination of the head and eye movement data suggests participants scanned less frequently when following the lead vehicle.
INTRODUCTION
Bowers and colleagues previously investigated the effects of age and vision impairment on head scanning and detection of pedestrians at intersections in a driving simulator (Bowers et al., 2014). Both older normally-sighted drivers and visually-impaired drivers had impaired detection performance that was associated with inadequate head scanning (such as failing to scan toward the pedestrian). Although these findings provided insights into the potential role of inadequate scanning in intersection detection failures, the pedestrians were stationary, did not present any threat, and eye movements were not recorded. To address these limitations, we have now developed more realistic intersection scenarios with moving motorcycle hazards and have implemented them in a driving simulator with head and eye tracking.
In prior driving simulator studies of intersection scanning behaviors, participants have either been guided through the virtual world by auditory navigation instructions, similar to those issued by GPS systems (Bowers et al., 2014), or by following a lead car (Romoser et al., 2013). These differing guidance methods might result in different scanning behaviors; e.g., following a lead car might reduce the number of gaze scans or the breadth of scanning compared to GPS instructions. Using our new scenarios, we conducted a preliminary study to examine differences in detection performance and scanning behaviors when younger and older normally-sighted drivers were guided by GPS instructions or a lead car through a series of intersections.
METHODS
Twenty one participants (8 female, 13 male) with normal vision (20/15 to 20/40) were recruited in two age groups: young (n = 11; 20–40 years; mean: 26.7 years) and older (n = 10; ≥ 60 years; mean: 70.2 years). Data from two participants (one younger, one older) were excluded due to simulator discomfort.
Driving Simulator
The driving simulator (LE-1500, FAAC Corp) provided a 225° horizontal field of view with five 42-inch LCD monitors (Figure 1). The vehicle used in the simulator for this study resembled a fully automatic transmission Crown Victoria car. The driving scenarios were scripted with Scenario Toolbox software (version 3.9.4. 25873, FAAC Incorporated). Head and eye movements were tracked with a digital 6-camera tracking system at 60 Hz (Smart Eye Pro Version 6.1, Goteborg, Sweden, 2015), which provided tracking across the full width of the simulator. Custom-written software was used to synchronize and merge the 60-Hz SmartEye data stream with the 30-Hz simulator data stream and the virtual world coordinate system. The resulting data were processed and analyzed with MATLAB 2015a.
Figure 1.

Driving simulator with 6-camera head and eye tracking system
Procedures
Participants completed seven drives within a 2-hour period. These included two acclimation drives, one practice drive that included all the elements of the test drives, two test drives with motorcycle events (GPS and Lead Car following; each 10 to 15 minutes depending on the participant’s driving speed) and two additional drives without motorcycles (each about 10 minutes). Participants were given as much time as they needed for the acclimation and practice drives until they felt comfortable driving the simulator and confident completing the tasks. A 5-point calibration of the gaze tracker was performed after the acclimation drives.
For the two drives with motorcycle events, participants drove the same route twice in counterbalanced order, once with automated auditory instructions similar to those given by a GPS navigation system (“turn right at next intersection”) and once while following a lead car. (See below for details of the route and motorcycle events.) To reduce the likelihood of participants remembering specific intersection events, two non-motorcycle drives in a different virtual world and without motorcycles at intersections were completed between the two test drives. In the GPS test drive, navigation instructions were delivered by pre-recorded audio files programmed to start playing when the participant’s vehicle was a pre-specified distance (approximately 70 m) from an intersection. In the Lead Car condition, participants followed a car that was scripted to drive at approximately 30 mph. The lead car made periodic stops to ensure that participants did not lose sight of it and would have to monitor it to avoid collision. Participants were instructed to obey all the normal rules of the road and, for the motorcycle drives, to press the horn whenever they saw a motorcycle. For the Lead Car drive, they were instructed to follow the lead car at a safe distance, as if following a friend’s car when driving in an unfamiliar area. The participant’s vehicle operated at a maximum speed of 35 mph.
Motorcycle Intersection Scenarios
The intersection scenarios were scripted within an urban setting (Figure 1) along a route comprising 43 intersections with one or two travel lanes in each direction. Motorcycle events occurred at 16 of these intersections, including 11 four-way intersections (in the shape of a +) and five T-intersections. There was cross traffic at 8 of the motorcycle intersections and oncoming traffic along other parts of the route.
The same basic scenario design was used for each of the 16 motorcycle events, simulating a situation in which a speeding motorcyclist exceeded the 30 mph speed limit and failed to check for other traffic before entering the intersection. In each event, a single motorcycle approached from either the right (n = 8) or the left (n = 8), appearing at 60 m from the intersection and then traveling at a constant speed of 45 mph (Figure 2). The motorcycle was triggered to appear when the participant’s vehicle was 30 m from the intersection. The motorcycle entered the intersection, but disappeared before reaching the area of the intersection in which the participant’s vehicle was expected to drive. This was to avoid any psychological stress caused by a collision between the motorcycle and the participant’s vehicle.
Figure 2.

Schematic representation of an intersection event with a motorcycle
To add variety and simulate a range of situations in which motorcycle collisions often occur, two of the 16 motorcycle intersections had yield signs on the participant’s approach, six had stop signs, two had traffic lights and six did not have any control device. The intersections with stop and yield signs provided situations in which right-of-way errors, the most common cause of motorcycle collisions (Clarke et al., 2007), might be made. Intersections also differed in whether the participant’s view of the approaching motorcycle was restricted by buildings. For 8 of the motorcycle intersections, buildings obscured the view of the side of the road from which the motorcycle approached. For the other 8 intersections, the view of the motorcycle approach was unobstructed. So that participants did not expect motorcycles to appear only at intersections, we also included seven instances of motorcycles on other road sections that were not intersections; however, data for these events were not analyzed.
Statistical Analysis
We evaluated the effects of age (older vs. younger), drive type (GPS vs. Lead Car) and intersection obstruction (obstructed vs. open) on detection rates, reaction times (RTs) and car distance from intersection at the time of the horn press by means of Linear Mixed Models (LMMs) for continuous outcome variables and General Linear Models (GLMs) for binary outcome variables in the R statistical programming environment (Version 0.99.903 - R Development Core Team, 2009).
RESULTS
Detection Performance
Participants detected significantly more motorcycles in the Lead Car than the GPS drive (b= .7; SE= .33; z= 2.11; p= .035; Figure 3). They also detected more motorcycles when the side on which the motorcycle appeared was obstructed than when it was open (b= −1.54; SE= .34; z= −4.46; p< .001; Figure 3). However, there were no significant main effects of age on motorcycle detection rates (b= −.8; SE= .55; t= −1.48; p= .14) and no interactions between the independent variables. We found no main effect of drive type (b= −.003; SE= .08; t= −.038; p= .97) on RTs. However, as expected, RTs were significantly longer when the side on which the motorcycle appeared was obstructed (mean 2.7 s) than when it was open (mean 2.3 s; b= .44; SE= .07; t= 5.85; p< .001), and older participants were significantly slower to detect motorcycles (mean= 2.8 s) than younger participants (mean= 2.3 s; b= −.4; SE= .16; t= −2.5; p= .022). The difference in RTs between obstructed and unobstructed intersections was greater for younger participants (difference= .67 s) than older participants (difference= .31 s; significant interaction F(1,7)= 5.6; p= .018; Figure 4)
Figure 3.
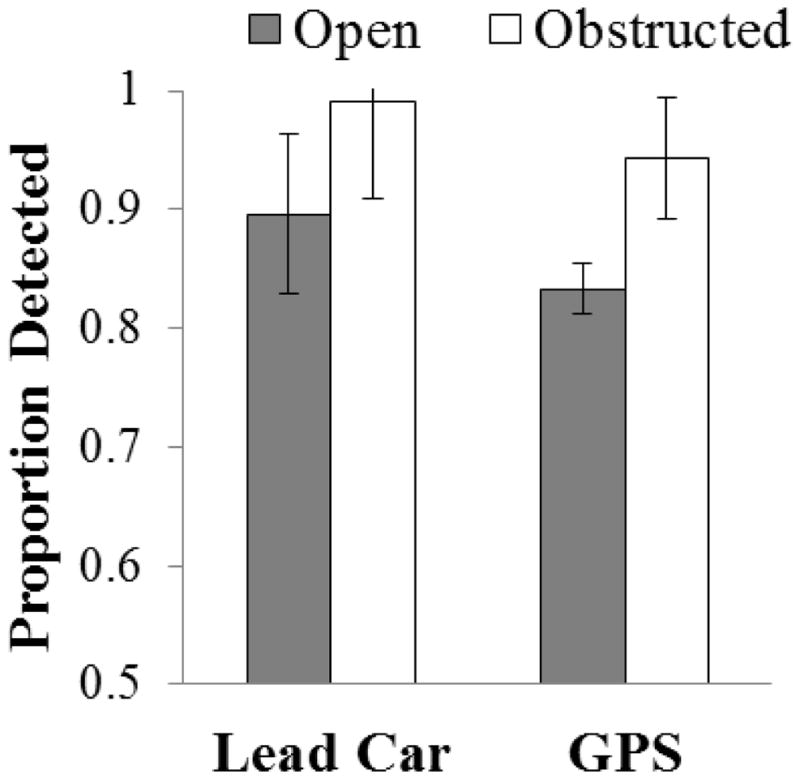
Mean (± SEM) detection rates for Lead Car and GPS drives split by obstructed and open intersections
Figure 4.
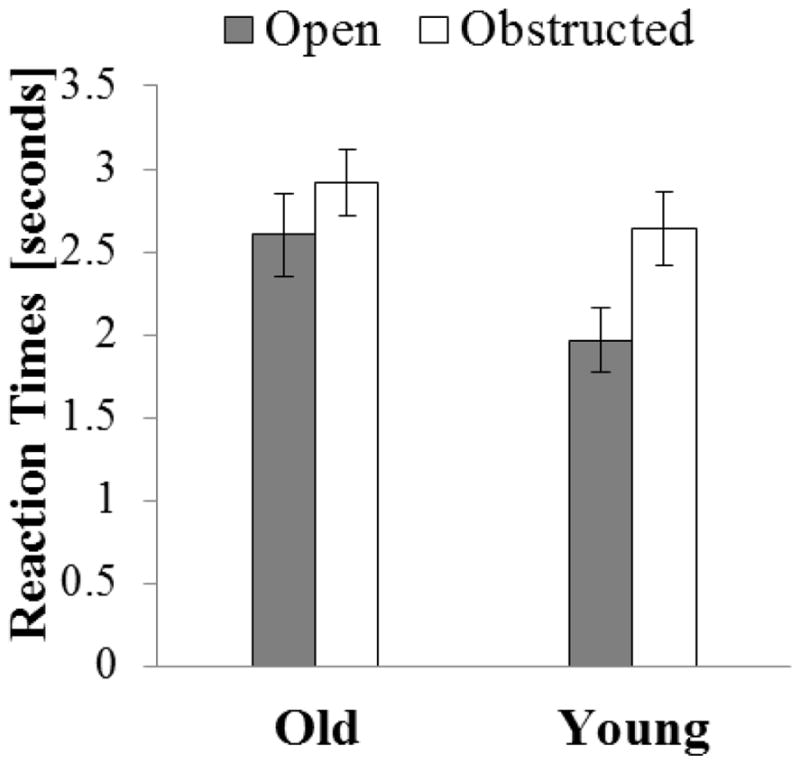
Mean (± SEM) reaction times for old and young participants split by obstructed and open intersections
Car Distance from Intersection at Horn Press
When following a lead car participants were significantly closer to the intersection when they pressed the horn (mean= 14.8 m) compared to when they were following GPS commands (mean= 17 m; b= 1.81; SE= .62; t= 2.94; p= .003). Similarly, when the intersection was obstructed, participants were also closer to the intersection at the time of pressing the horn (b= −1.36; SE= .56; t= −2.43; p= .016; Figure 5). We found no main effect of age; however, there was an interaction between age and obstruction (F(1, 7)= 11.94; p< .001). Younger participants pressed the horn on average 3 m earlier for unobstructed compared to obstructed intersections, whereas older participants showed no difference between the two types of intersections (Figure 5).
Figure 5.
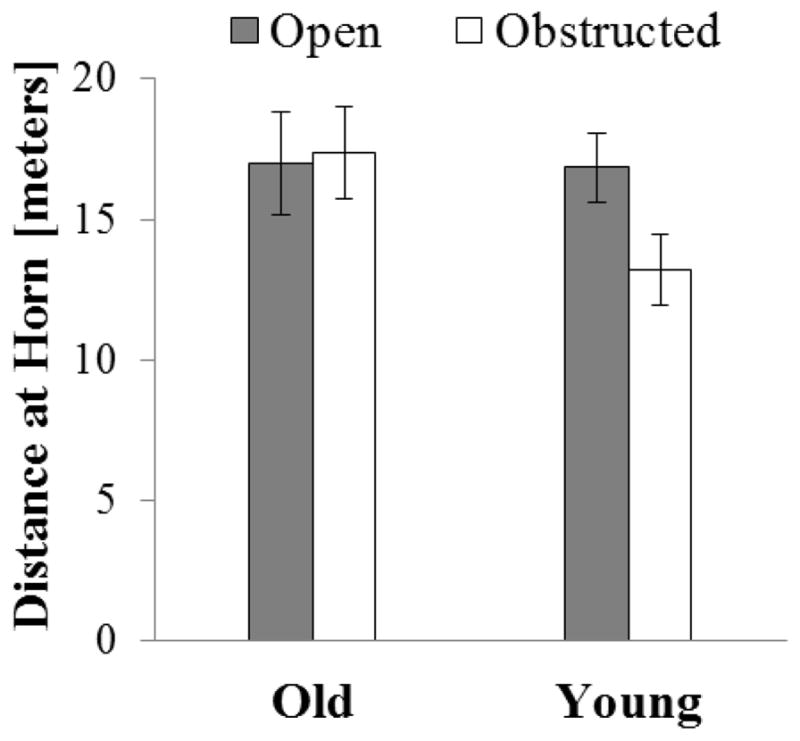
Mean (± SEM) distance of car from intersection at horn press for old and young participants split by obstructed and open intersections
Gaze movements
Plots of lateral head and gaze position were examined for each participant at each motorcycle intersection (Figure 6). As participants approached an intersection, gaze movements typically comprised a series of large lateral head rotations with eye saccades. The movements took the eyes away from the straight ahead position to the left or right with a subsequent large movement in the opposite direction bringing the eyes back to the center. We use the term “scan” to describe the complete gaze movement from the straight ahead position to the furthest lateral position. In Figure 6, we present sample plots to demonstrate differences in scanning behaviors between Lead Car and GPS drives. We are in the process of developing an algorithm to quantify the gaze scanning behaviors.
Figure 6.

Example plots of lateral head and gaze position for motorcycle intersection events in Lead Car (left side) and GPS drives (right side) for older (top row) and younger (bottom row) participants Grey shaded area denotes the period for which the motorcycle was in the scene
We observed that there was less scanning activity in the Lead Car than the GPS drives for both younger and older participants. For example, in Figure 6a, when approaching an intersection in a Lead Car drive an older participant made no gaze scans to the left and only one gaze scan to the right. By comparison, in Figure 6b, when approaching an intersection in the GPS drive, an older participant made one scan to the left and three to the right. Similar behaviors are evident for a younger participant in an intersection from a Lead Car (Figure 6c) and a GPS drive (Figure 6d).
DISCUSSION
Participants detected significantly more motorcycles when following a lead vehicle than when guided along the route by GPS instructions. This may seem a counter intuitive finding given that preliminary examination of the gaze data suggested participants made fewer scans on approach to intersections when following the lead vehicle and that their fixation location was primarily on that vehicle (straight ahead), as would be expected when monitoring the car ahead to maintain a safe following distance. However, when motorcycles were detected in the Lead Car condition, the horn-press response did not occur until the participant’s vehicle was closer, on average, to the intersection than in the GPS condition.
Interestingly, participants’ response performance rates were higher when the side on which the motorcycle appeared was obstructed compared to open for both the Lead Car and GPS drives. When the motorcycle started the approach to an intersection out of view behind a building, it suddenly became visible as it drove past the obstruction, whereas when there was no obstruction motorcycles became gradually more visible as they approached the intersection. Targets which have a sudden onset are detected more efficiently in peripheral vision (e.g., Folk, Remington & Wright, 1994), which may have contributed to the higher detection rates at obstructed intersections. On the other hand, it is also possible that participants might have expected motorcycles to be more likely to appear when the view was obstructed than open and were therefore more likely to scan when there was an obstruction. Further analysis of the scanning behaviors will enable us to test this second hypothesis.
We also evaluated whether there were differences in detection rates and response times between older and younger drivers. We found that older drivers were on average approximately 500ms slower to detect motorcycles; however, overall detection rates were not different. We also found significant interactions between age and obstruction for both RTs (Figure 4) and the distance of the car to the intersection at the time of the horn press (Figure 5). In both cases, the difference in the behavioral response between the open and obstructed intersections was greater for the younger than the older participants. Although overall RTs were longer for older participants, we found no difference between older and younger participants in the distance of the car to the intersection at the time of the horn press because older participants tended to approach the intersections more slowly than younger participants. It is possible that the older participants were not as familiar with simulated driving environments as younger participants (who were more likely to play video games), or may just have been more cautious in their driving.
Interestingly, there was a significant interaction between age and obstruction for the distance from the intersection at which participants pressed the horn. While there was little difference between open and obstructed intersections for older participants, younger participants pressed the horn on average 3 meters earlier when the intersection was not obstructed as compared to when it was obstructed. This may indicate that older drivers used the same strategy in looking for hazards at intersections irrespective of the level of obstruction. However, more detailed analyses of head and eye movement behaviors are necessary to verify this hypothesis. Prior studies reported that older drivers were less likely than younger drivers to look toward locations in which hazards might appear at intersections (Romoser & Fisher, 2009; Romoser et al., 2013); however, in those studies, participants followed a lead car. In future analyses, we plan to examine the extent to which older participants behave differently from younger participants in terms of their head and eye movement behaviors, as well as their behavioral responses, depending on the method used to guide them through the world.
In conclusion, we have demonstrated that, compared to following GPS navigation instructions, following a lead vehicle has an effect not only on detection performance, but also appears to influence how much of the driving scene is inspected with eye/head scanning. Thus motor responses as well as eye and head movement behavior may be influenced by the method of guidance through the world, which is an important consideration for the design of future paradigms investigating scanning behaviors during driving tasks. We found evidence in our current pilot study to suggest that, although people scan less often when following a lead vehicle, this does not necessarily mean that more hazards will be missed. We have also found evidence to suggest that older drivers react more slowly to hazardous events but that detection rates did not differ from those of younger participants. To determine whether the difference between older and younger drivers’ RTs has a behavioral consequence (i.e. carries with it an increase in crash risk), we are developing an algorithm to examine whether detections were early enough to avoid a potential collision with the hazard given the speed and distance of both vehicles at the time of the horn press.
In the future, we intend to increase our sample size and use our gaze scan algorithm to verify these initial observations.
Acknowledgments
Funded in part by NIH Grants: R01-EY025677, T35-EY007149 & S10-RR028122
References
- Bowers AR, Ananev E, Mandel AJ, Goldstein RB, Peli E. Driving with hemianopia: IV. Head scanning and detection at intersections in a simulator. Investigative Ophthalmology and Visual Science. 2014;55:1540–1548. doi: 10.1167/iovs.13-12748. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Clarke DD, Ward P, Bartle C, Truman W. The role of motorcyclist and other driver behaviour in two types of serious accident in the UK. Accident Analysis and Prevention. 2007;39(5):974–981. doi: 10.1016/j.aap.2007.01.002. [DOI] [PubMed] [Google Scholar]
- Folk CL, Remington RW, Wright JH. The structure of attentional control: contingent attentional capture by apparent motion, abrupt onset, and color. Journal of Experimental Psychology: Human Perception and Performance. 1994;20(2):317. doi: 10.1037//0096-1523.20.2.317. [DOI] [PubMed] [Google Scholar]
- Romoser MR, Fisher DL. The effect of active versus passive training strategies on improving older drivers’ scanning in intersections. Human Factors: The Journal of the Human Factors and Ergonomics Society. 2009;51(5):652–668. doi: 10.1177/0018720809352654. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Romoser MRE, Pollatsek A, Fisher DL, Williams CC. Comparing the glance patterns of older versus younger experienced drivers: Scanning for hazards while approaching and entering the intersection. Transportation Research Part F-Traffic Psychology and Behaviour. 2013;16:104–116. doi: 10.1016/j.trf.2012.08.004. [DOI] [PMC free article] [PubMed] [Google Scholar]