

Abstract
Introduction
Walking instability is a contributor to falls and other undesired changes in walking performance. We investigated the effect of split-belt treadmill based perturbations on dynamic stability. Furthermore, we examined the relationships for dynamic stability and symmetry during unperturbed and perturbed walking.
Method
Twenty healthy young adults completed unperturbed and perturbed walking conditions on a split-belt treadmill. The continuous perturbation involved moving the parallel belts at unequal speeds (1.5 m/s: 0.5 m/s). Margins of stability (MoS) and step length symmetry (SYM) were assessed.
Results
Stability and symmetry measures each decreased at the onset of the split walking perturbation. Only anterior-posterior (AP) MoS and SYM exhibited adaptive changes. Associations were found primarily for AP MoS with immediate changes in SYM at the onset of split walking, and over the duration of the split walking condition.
Discussion
Our findings suggest walking strategies were adapted to maintain dynamic stability when faced with a continuous perturbation. Additionally, dynamic stability was associated with symmetry during perturbed walking.
Keywords: Stability, Adaptation, Perturbation, Gait, Locomotion, Treadmill
Introduction
Each year a large percentage of individuals with common neuromusculoskeletal impairments (e.g., post amputation, stroke) experience a fall [1, 2]. Not surprisingly, significant resources are directed toward identifying characteristics contributing to or preventing falls. Though falls are provoked by multiple factors, walking instability is recognized as a primary contributor, and measures assessing dynamic stability are increasingly prevalent in gait research [3-11].
Interestingly, authors using the margin of stability (MoS) [12], a measure of dynamic stability integrating center of mass (CoM) velocity effects into CoM maintenance within the base of support (BoS), suggested recently a primary objective of gait may be to maintain dynamic stability at or above a threshold level [5, 13-15]. For example, stroke survivors increased stride width, and therefore medial-lateral (ML) BoS, to potentially compensate for the destabilizing effect of increased CoM movement[3, 16]. Furthermore, healthy adults were observed to reactively increase their anterior-posterior (AP) MoS with repetitive unexpected gait perturbations[9], and proactively increased their backwards MoS before, during, and immediately following repeated slip perturbations[17]. Though optimization of energy cost may drive selection of gait characteristics[18, 19], an innate drive to maintain stability would likewise make intuitive sense given an outcome of instability is a potentially injurious fall.
From this perspective, stability may be maintained at the expense of other characteristics of normal walking, such as symmetry. It is therefore not surprising that temporal-spatial asymmetry was closely related to performance on tasks involving dynamic balance among stroke survivors[20]. However, drawing definitive conclusions about the relationship is difficult in clinical populations, as instability and asymmetry stem from internal sources (e.g., neuromuscular weakness, somatosensory loss) or may be provoked by external conditions (e.g., walking surface, use of a prosthetic device). One way to examine the relationship between stability and symmetry is through continuous perturbations created by parallel belts of a split-belt treadmill moving at different speeds (commonly a 2:1 or 3:1 ratio). In these studies, neural processes (described in greater detail elsewhere[21]) instigate immediate reactive accommodations at perturbation onset followed by trial-and-error predictive feedforward changes as walking in the perturbed conditions continues. Step length symmetry (SYM) responds the most robustly with reactive asymmetry early and improvement toward baseline symmetry over time[22]. While the adaptive response for measures of dynamic stability is unknown, a split-belt testing paradigm provides the means to systematically evaluate the relationship between dynamic stability and symmetry across changing walking conditions.
The purpose of our study was twofold. Our first objective was to determine the effect of split-belt treadmill based perturbations on dynamic stability. We hypothesized MoS, our measure of dynamic stability, would initially decrease at the onset of split belt walking (greater instability), followed by adaptive changes increasing stability. An improved MoS could reflect the underlying motivation to maintain stability, and would mirror the well-known adaptive response in SYM. Our second objective was to examine the relationships for MoS and SYM during unperturbed and perturbed walking. We hypothesized stability and symmetry would demonstrate strong associations for baseline measures and with changes observed during a split walking condition.
Methods
Participants
Twenty healthy young adults without orthopedic or neurologic injuries were recruited to participate in the study (age 27.0 ± 5.0 years, height 1.72 ± 0.11 m, weight 73.0 ± 12.6 kg, 9 males/11 females). Participants had no prior experience walking on a split-belt treadmill with the belts moving at different speeds. All participants gave written informed consent before completing the study protocol.
Protocol
Stability and symmetry were assessed during normal and perturbed walking conditions created using a standardized split-belt treadmill testing paradigm[22]. The treadmill (Bertec Corp., Columbus, OH) is configured with two belts with separate controls such that both belts can move at the same speed (‘tied’), or one belt can move faster than the other (‘split’). The split condition creates a novel continuous perturbation well suited to assessing the relationship between stability and symmetry.
Testing consisted of baseline tied walking conditions and a split walking condition. The baseline conditions involved walking with belt speeds tied, first at a speed of 0.5 m/s then at a speed of 1.5 m/s. Each baseline condition lasted 3 minutes. The belts were then set to a split condition in which one belt moved at 0.5 m/s (slow belt), while the other belt was abruptly made to move at 1.5 m/s (fast belt).
Participants completed a 10-second bout of the split condition to familiarize the participant to the continuous perturbation without lasting long enough to produce any adaptation. Three minutes of slow tied walking followed the familiarization to ensure any potential effects of the familiarization were minimized (washed-out). Participants then walked in the split condition for 15 minutes.
Motion capture data for the lower extremities, pelvis and trunk segments were collected during testing at 100 hz using a 12-camera system (Vicon, Oxford, UK) and 45 reflective markers. These data were synchronized with analog data collected at 1000 hz from force plates integrated in the treadmill. Gait events (initial contact and toe-off) were determined using vertical ground reaction forces measured by the treadmill force plates. Temporal-spatial parameters were derived from the combined motion capture and force plate data and used in calculating step-by-step values for symmetry and dynamic stability.
SYM was determined using a ratio of the difference in step length[22]:
where SLfast and SLslow represent the step length for the limb assigned to the fast and slow belt respectively during the split condition. Perfect symmetry in step length would produce a value of 0. A negative symmetry value would indicate the step on the fast belt was shorter than the step on the slow belt. A positive value reflects the inverse relationship.
Dynamic stability was assessed using the margin of stability (MoS)[12]. The MoS expands upon the classic rule for stability requiring the CoM to remain within the BoS. Unlike the classic approach, MoS accounts for the effects of CoM velocity in a calculation termed the extrapolated CoM (xCoM).
Theoretically, instability and the risk for falls increases as the xCoM nears the margins of the BoS even though the CoM position is at that moment within the BoS. MoS was calculated for the ML and AP directions as[12]:
with,
MoS was calculated separately for each lower extremity and averaged. The toe marker of the leading foot was used to demarcate the anterior border of the BoS in calculating anterior-posterior (AP) MoS, and the fifth metatarsal marker was used for the lateral border when calculating the ML MoS. x represents the position of the CoM, and x′ is the velocity of the CoM. CoM was approximated at the mid-point of right and left superior iliac spine markers. ω0 was the angular eigenfrequency of the pendulum according to the inverted pendulum model of human walking (ω0 = √(l/g) where l is equal to leg length and g is equal to the acceleration caused by gravity).
Symmetry and dynamic stability values for each step were averaged into 5 steps epochs. Epochs representing the last 5 steps of the slow tied baseline condition, the first 5 steps taken during the split condition (“split early”), and the final 5 steps of the split condition (“split late”) were used in the statistical analysis.
Statistical Analysis
Within-subjects Analysis of Variance (ANOVA) models were used to compare means from baseline, split early, and split late values for step length for each limb, stride width, SYM, ML MoS, and AP MoS. A Greenhouse-Geisser correction was used to correct for violations of the assumption of sphericity. Follow-up tests were performed using paired t-tests. A Bonferroni correction of alpha/2 was used to keep family-wise alpha to the desired level. Pearson's correlation (r) was used to examine the relationship between conditions in each variable, and between AP MoS and SYM and ML MoS and SYM. Data outliers were excluded from individual correlations when Cook's Distance was greater than 1. Correlation coefficients (r) of <0.25 were considered weak, 0.25 - 0.5 fair, 0.5 - 0.75 moderate to good, and >0.75 good to excellent relationships[23]. Correlations were calculated in R version 3.2.3. All correlation tests were conducted with an alpha 0.05.
Results
Response to Split Walking
The testing produced anticipated changes in SYM as symmetric baseline walking became highly asymmetric during early split walking but improved toward baseline over the course of the split walking condition (Figure 1A). A similar response to SYM was observed in MoS (Figure 1B and 1C) except that ML MoS did not improve toward baseline by the conclusion of split walking. As such, ANOVA testing revealed significant differences for all parameters (all p<.001).
Figure 1. Representative results from a single participant for A) step length symmetry, B) AP MoS and ML MoS during tied baseline and split adaptation walking.
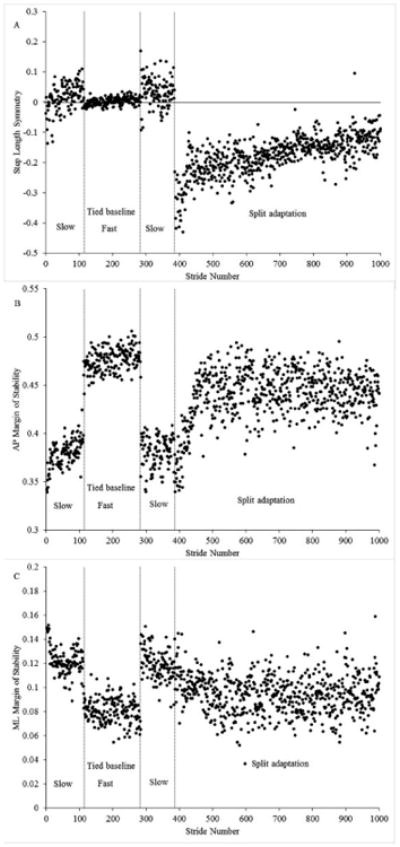
Overall, participants exhibited a SYM of 0.01±0.05, an AP MoS of 0.40±0.03 m, and a ML MoS of 0.12±0.02 m during tied baseline walking at the slow speed (0.5 m/s) (Table 1). The perturbation produced by split walking resulted in reactive changes including increases in slow limb step length (p < 0.001) and decreases in fast limb step length (p < 0.001). As such, immediate decreases in SYM and AP MoS (p < 0.0001 for both measures) were measured. Adaptive processes next resulted in step lengths reverting toward baseline values over the course of the 15 minutes of split walking (p < 0.001), with larger changes occurring in the fast limb step length as compared to the slow limb (p < 0.001). The changes during split walking produced improved SYM and AP MoS (p < 0.001 for both).
Table 1.
Mean values (meters) ± standard deviation across tested walking conditions for measures of dynamic stability, symmetry, step width and step length.
| Baseline | Split Early | Baseline to Split Change | Split Late | Change During Split | |
|---|---|---|---|---|---|
| AP MoS | 0.40 ± 0.03 | 0.36 ± 0.04 | -0.05 ± 0.03* | 0.43 ± 0.06 | 0.07 ± 0.02^ |
| ML MoS | 0.12 ± 0.02 | 0.10 ± 0.03 | -0.03 ± 0.03* | 0.10 ± 0.02 | -0.00 ± 0.02 |
| SYM | 0.01 ± 0.05 | -0.36 ± 0.12 | -0.37 ± 0.14* | -0.09 ± 0.05 | 0.28 ± 0.13^ |
| Fast belt step length | 0.40 ± 0.03 | 0.31 ± 0.07 | -0.09 ± 0.07* | 0.49 ± 0.05 | 0.18 ± 0.07^ |
| Slow limb step length | 0.39 ± 0.04 | 0.65 ± 0.04 | 0.25 ± 0.06* | 0.59 ± 0.05 | -0.06 ± 0.05^ |
| Stride width | 0.15 ± 0.04 | 0.17 ± 0.03 | 0.01 ± 0.039 | 0.16 ± 0.04 | -0.01 ± 0.05 |
Note:
denotes a statistically significant (p<0.05) difference between baseline and the early split condition.
denotes a statistically significant (p<0.05) difference between split early and split late.
For ML MoS, small reactive changes resulted from the perturbation experienced during early split walking (p < 0.0001). However, ML MoS did not change significantly between early and late split walking (p = 0.32). Stride width did not significantly change from baseline to split early (p = 0.16), or during the split condition (p = 0.58).
Relationships for MoS and SYM
Several correlations between walking conditions were found for baseline MoS (Figure 2). Moderate to strong correlations were found with early split MoS in both the AP (r = 0.83, p<0.0001), and the ML planes (r = 0.61, p=0.0045). However, baseline MoS was not related to the change in MoS that occurred by the conclusion of split walking. Baseline SYM did not have a significant correlation with SYM during split early walking or with changes in SYM over the split condition (Table 2).
Figure 2. Scatterplot of associations with baseline MoS for A) AP MoS during baseline walking and AP MoS during split early walking, and B) ML MoS during baseline walking and ML MoS for split early walking.
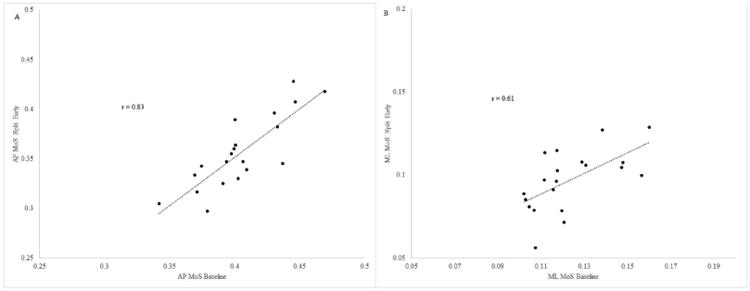
Table 2.
Correlations for measures of dynamic stability and symmetry.
| r | p | CI | |
|---|---|---|---|
| SYM Baseline – SYM Split early | -0.06 | 0.79 | -0.50-0.40 |
| SYM Baseline - SYM Split change | 0.43 | 0.069 | -0.30-0.74 |
| AP MoS Baseline - AP MoS Split early | 0.83 | <0.0001 | 0.61-0.93 |
| AP MoS Baseline - AP MoS Split change | -0.19 | 0.43 | -0.58-0.23 |
| ML MoS Baseline - ML MoS Split early | 0.61 | 0.0045 | 0.23-0.83 |
| ML MoS Baseline - ML MoS Split change | -0.17 | 0.48 | -0.57-0.30 |
| AP MoS Baseline - SYM Split early | 0.60 | 0.007 | 0.20-0.83 |
| AP MoS Baseline - SYM Split change | -0.51 | 0.026 | -0.78--0.73 |
| ML MoS Baseline - SYM Split early | 0.36 | 0.12 | -0.097-0.69 |
| ML MoS Baseline - SYM Split change | -0.24 | 0.30 | -0.62-0.22 |
| SYM Baseline - AP MoS Split early | 0.08 | 0.72 | -0.37-0.51 |
| SYM Baseline - AP MoS Split change | 0.12 | 0.63 | -0.35-0.53 |
| SYM Baseline - AP MoS Baseline | 0.35 | 0.69 | -0.13-0.69 |
| SYM Split early - AP MoS Split early | 0.69 | 0.0011 | 0.34-0.87 |
| SYM Split change - AP MoS Split change | 0.58 | 0.0077 | 0.18-0.81 |
Note: SYM = step length symmetry, AP = Anterior-Posterior plane, ML = Medial-Lateral Plane, MoS = Margins of Stability, CI = Confidence Interval
Relationships between MoS and SYM were also examined (Table 2, Figure 3). Baseline AP MoS was not significantly correlated to baseline SYM, but showed moderate correlations with split early SYM (r = 0.60, p=0.007) and (inversely) with the change in SYM (r = -0.51, p=0.026). Baseline SYM did not show analogous relationships with AP MoS. AP MoS and SYM showed moderate to good correlations during split early (r = 0.69, p<0.0011) and for the change in split conditions (r = 0.58, p=0.0077). ML MoS showed no significant correlations with SYM.
Figure 3.
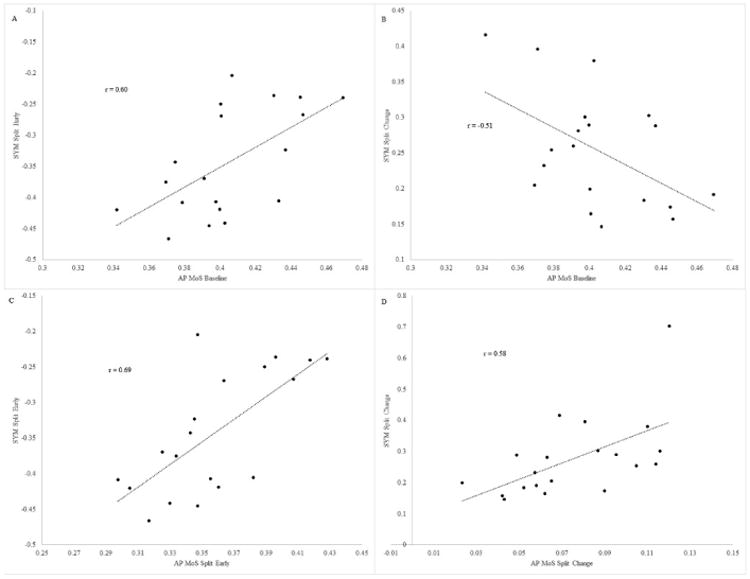
Scatterplot of associations between MoS and SYM for A) AP MoS during baseline walking and SYM during split early walking, B) AP MoS during baseline walking and the change in SYM between split early to split late walking, C) AP MoS during split early and SYM during split early walking, and D) the change in AP MoS between split early to split late walking and the change in SYM between split early to split late walking
Discussion
This study assessed the response of MoS to a continuous perturbation created on a split-belt treadmill. Additionally, we explored potential relationships between MoS and SYM during baseline (unperturbed) and split (perturbed) walking. Our first hypothesis was that MoS would demonstrate an adaptive response to the split belt perturbation in a manner similar to the well-defined response with SYM. Our results supported our hypothesis in the AP plane but not in the ML plane. Our second hypothesis, that MoS and SYM were associated, was partially supported by our results. Moderate to strong correlations were found for AP MoS and SYM during the early portion of split walking, and for changes in AP MoS and SYM during the split condition. In addition, several moderate or stronger relationships where identified for baseline MoS with stability and symmetry during perturbed walking. Together, the correlations suggest there may be particular value in maximizing stability.
ML MoS Adaptation and Relationships
A small but statistically significant decrease in ML MoS occurred during the split early condition compared to baseline. This finding agrees with the theoretical hypothesis that MoS should decrease because perturbed walking is assumed to be inherently less stable. However, previous results showed ML MoS did not change or increased due to compensations for ML directed platform perturbations[5, 11], or when walking on a normal or loose rock surface[10]. CoM motion and stride width help may explain the contrasting findings. Split walking is known to increase ML CoM motion which could be destabilizing[24]. Increasing stride width, and therefore BoS, is a common strategy to increase walking stability with challenging walking conditions[25, 26]. However, stride width did not change (Table 1). Potentially, the AP directed perturbation of split walking was not perceived as causing ML instability and as such, compensations in ML foot placement were not made. A lack of perceived instability could also account for the absence of adaptive changes in ML MoS during the split walking condition. Regardless, a lack of statistically significant correlations for ML MoS and SYM suggests these measures were not related when walking was perturbed during the split condition (Table 2).
AP MoS Adaptation and Relationships
Previous literature observed feedforward adaptive processes resulted in changes in AP MoS when walkers were faced with repeated isolated perturbations[9, 17]. Our results extend previous findings to substantiate AP MoS also exhibits an adaptive response with continuous perturbations created through split belt walking. From a simplistic view increases in fast limb step length would increase the BoS and could explain the improved AP MoS if CoM position and velocity remained constant. However, there are reactive changes in AP CoM motion at the onset of split walking. Unlike ML CoM, which only exhibits reactive changes, adaptations in AP CoM motion strategies occur between early and late split walking[27]. As figure 4 shows, walkers adopted a greater posterior displacement of the CoM during single limb stance on the fast belt, while maintaining a relatively fixed CoM position when on the slow belt. An increase in forward movement of the CoM during step-to-step transitions from the slow belt to the fast belt compensates for the asymmetric CoM displacement, maintains walking speed, and may lower energy expenditure for walking[27]. We suggest improvements in AP MoS may have resulted from strategies seeking to maintain a minimum distance between the CoM position and the anterior edge of the BoS. Concerning improvements in SYM during split walking, the increase in forward CoM movement during step-to-step transitions from the slow belt to the fast belt was likely coupled with efforts increasing fast limb step length. Likewise, posterior CoM displacement during single limb stance on the fast belt may have enabled the modest shortening in slow limb step length.
Figure 4.
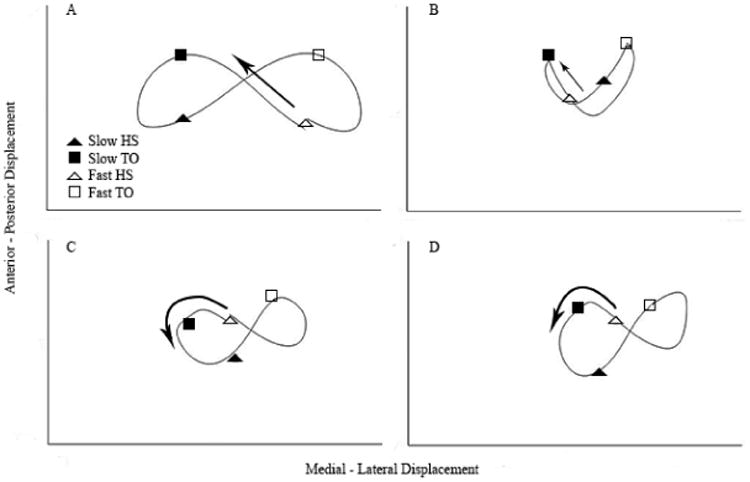
Representative CoM displacement from a single participant during A) slow tied baseline, B) fast tied baseline, C) early split adaptation walking, and D) late split adaptation walking. Gait events for the limb assigned to the slow belt (HS: filled triangle, TO: filled square) and fast belt (HS: unfilled triangle, TO: unfilled square) are noted.
Relationships for AP MoS during Perturbed Walking
Moderate to good associations were found for the reactive adjustments to the perturbation created in the split early condition and for adaptive changes by the conclusion of split walking. A significant association between SYM and AP MoS suggested those who were more stable when initially perturbed were also more symmetrical. A significant association for the changes in AP MoS and SYM during the split condition suggests this relationship holds through changes in walking performance. While the latter may be driven simply by the data for split early (e.g. those who reacted to the split condition with relatively lower stability had the potential to achieve larger improvements towards baseline symmetry), these findings suggest there is a meaningful relationship between stability and symmetry during perturbed walking.
Significant associations for baseline MoS were also found while analogous relationships for baseline SYM were not. Results show participants who were more stable (higher MoS) during baseline walking remained more stable during split-belt walking. Furthermore, those with higher AP stability walked more symmetrically. These results potentially reflect the aforementioned innate drive to maintain stability regardless of the walking conditions[14, 15]. Those who had already attained a sufficient MoS may have been more free to explore foot placement strategies that improved symmetry. Alternatively, higher baseline stability may have conferred some resistance to perturbation, decreasing the need to employ active strategies to avoid instability[16].
Limitations
Some caution is advised in generalizing our results. Our sample was a group of young healthy adults. Further research is needed to confirm these relationships exist in clinical populations. Additionally, while the effects of split-belt walking are known to transfer to overground walking[28], we cannot be sure the relationships we found during perturbed walking on a treadmill transfer to perturbations experienced during overground walking.
Conclusions and Clinical Implications
Perturbations caused by split-belt walking provoke a decrease in walking stability and symmetry. However, only AP MoS exhibited adaptive changes and demonstrated associations with the response in symmetry. Our results provide additional evidence suggesting maintenance of stability is a high priority during walking. Interventions improving stability may enable locomotor pattern exploration toward patterns increasing walking efficiency, symmetry, and speed. Furthermore, associations between stability and symmetry suggest interventions increasing gait symmetry may likewise improve an individual's walking stability. Continued research is needed to establish causative relationships between MoS and other gait parameters, and develop clinical applications.
Highlights.
Margin of Stability (MoS) was assessed during split-belt treadmill walking
Anterior-Posterior MoS revealed an adaptive response; medial-lateral MoS did not
Anterior-Posterior MoS was related to step length symmetry during perturbed walking
Correlations suggest there may be particular value in maximizing dynamic stability
Acknowledgments
The views expressed in this article are those of the authors and do not necessarily reflect the official policy or position of the Department of Veterans Affairs or the United States government.
Funding. Support for this project was provided by Clinical and Translational Science Awards (CTSA) (KL2TR000057 and UL1TR000058) from the National Center for Advancing Translational Sciences. Resources and the use of facilities were supported by the Hunter Holmes McGuire Veteran Affairs Medical Center, Richmond, Virginia.
Footnotes
Financial Disclosure and Conflict of Interest: We, the authors, affirm that we have no financial affiliation (including research funding) or involvement with any commercial organization that has a direct financial interest in any matter included in this manuscript.
Publisher's Disclaimer: This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final citable form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
References
- 1.Miller WC, Speechley M, Deathe B. The prevalence and risk factors of falling and fear of falling among lower extremity amputees. Archives of Physical Medicine and Rehabilitation. 2001;82(8):1031–7. doi: 10.1053/apmr.2001.24295. [DOI] [PubMed] [Google Scholar]
- 2.Jorgensen L, Engstad T, Jacobsen BK. Higher incidence of falls in long-term stroke survivors than in population controls: depressive symptoms predict falls after stroke. Stroke. 2002;33(2):542–7. doi: 10.1161/hs0202.102375. [DOI] [PubMed] [Google Scholar]
- 3.Bruijn SM, et al. Assessing the stability of human locomotion: a review of current measures. J R Soc Interface. 2013;10(83):20120999. doi: 10.1098/rsif.2012.0999. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 4.Beurskens R, Wilken JM, Dingwell JB. Dynamic stability of superior vs. inferior body segments in individuals with transtibial amputation walking in destabilizing environments. J Biomech. 2014;47(12):3072–9. doi: 10.1016/j.jbiomech.2014.06.041. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 5.McAndrew Young PM, Wilken JM, Dingwell JB. Dynamic margins of stability during human walking in destabilizing environments. J Biomech. 2012;45(6):1053–9. doi: 10.1016/j.jbiomech.2011.12.027. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 6.Curtze C, et al. Over rough and smooth: amputee gait on an irregular surface. Gait Posture. 2011;33(2):292–6. doi: 10.1016/j.gaitpost.2010.11.023. [DOI] [PubMed] [Google Scholar]
- 7.Hak L, et al. Stepping asymmetry among individuals with unilateral transtibial limb loss might be functional in terms of gait stability. Phys Ther. 2014;94(10):1480–8. doi: 10.2522/ptj.20130431. [DOI] [PubMed] [Google Scholar]
- 8.Hak L, et al. Walking in an unstable environment: strategies used by transtibial amputees to prevent falling during gait. Arch Phys Med Rehabil. 2013;94(11):2186–93. doi: 10.1016/j.apmr.2013.07.020. [DOI] [PubMed] [Google Scholar]
- 9.Bierbaum S, et al. Adaptive feedback potential in dynamic stability during disturbed walking in the elderly. J Biomech. 2011;44(10):1921–6. doi: 10.1016/j.jbiomech.2011.04.027. [DOI] [PubMed] [Google Scholar]
- 10.Gates DH, et al. Frontal plane dynamic margins of stability in individuals with and without transtibial amputation walking on a loose rock surface. Gait Posture. 2013;38(4):570–5. doi: 10.1016/j.gaitpost.2013.01.024. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 11.Beltran EJ, Dingwell JB, Wilken JM. Margins of stability in young adults with traumatic transtibial amputation walking in destabilizing environments. J Biomech. 2014;47(5):1138–43. doi: 10.1016/j.jbiomech.2013.12.011. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 12.Hof AL, Gazendam MG, Sinke WE. The condition for dynamic stability. J Biomech. 2005;38(1):1–8. doi: 10.1016/j.jbiomech.2004.03.025. [DOI] [PubMed] [Google Scholar]
- 13.Hof AL. The ‘extrapolated center of mass’ concept suggests a simple control of balance in walking. Hum Mov Sci. 2008;27(1):112–25. doi: 10.1016/j.humov.2007.08.003. [DOI] [PubMed] [Google Scholar]
- 14.Rosenblatt NJ, Hurt CP, Grabiner MD. Sensitivity of Dynamic Stability to Changes in Step Width During Treadmill Walking by Young Adults. J Appl Biomech. 2012 doi: 10.1123/jab.28.5.616. [DOI] [PubMed] [Google Scholar]
- 15.Rosenblatt NJ, Grabiner MD. Measures of frontal plane stability during treadmill and overground walking. Gait Posture. 2010;31(3):380–4. doi: 10.1016/j.gaitpost.2010.01.002. [DOI] [PubMed] [Google Scholar]
- 16.Hak L, et al. Stepping strategies used by post-stroke individuals to maintain margins of stability during walking. Clin Biomech (Bristol, Avon) 2013;28(9-10):1041–8. doi: 10.1016/j.clinbiomech.2013.10.010. [DOI] [PubMed] [Google Scholar]
- 17.Bhatt T, Wening JD, Pai YC. Adaptive control of gait stability in reducing slip-related backward loss of balance. Exp Brain Res. 2006;170(1):61–73. doi: 10.1007/s00221-005-0189-5. [DOI] [PubMed] [Google Scholar]
- 18.Finley JM, Bastian AJ, Gottschall JS. Learning to be economical: the energy cost of walking tracks motor adaptation. J Physiol. 2013;591(4):1081–95. doi: 10.1113/jphysiol.2012.245506. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 19.Bertram JE. Constrained optimization in human walking: cost minimization and gait plasticity. J Exp Biol. 2005;208(Pt 6):979–91. doi: 10.1242/jeb.01498. [DOI] [PubMed] [Google Scholar]
- 20.Lewek MD, et al. The relationship between spatiotemporal gait asymmetry and balance in individuals with chronic stroke. J Appl Biomech. 2014;30(1):31–6. doi: 10.1123/jab.2012-0208. [DOI] [PubMed] [Google Scholar]
- 21.Reisman DS, Bastian AJ, Morton SM. Neurophysiologic and rehabilitation insights from the split-belt and other locomotor adaptation paradigms. Phys Ther. 2010;90(2):187–95. doi: 10.2522/ptj.20090073. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 22.Reisman DS, Block HJ, Bastian AJ. Interlimb coordination during locomotion: what can be adapted and stored? J Neurophysiol. 2005;94(4):2403–15. doi: 10.1152/jn.00089.2005. [DOI] [PubMed] [Google Scholar]
- 23.Portney LG, Watkins MP. Foundations of clinical research: applications to practice. Prentice Hall Health: Upper Saddle River. 2000:494–496. [Google Scholar]
- 24.Sawers A, et al. Gradual training reduces the challenge to lateral balance control during practice and subsequent performance of a novel locomotor task. Gait Posture. 2013;38(4):907–11. doi: 10.1016/j.gaitpost.2013.04.019. [DOI] [PubMed] [Google Scholar]
- 25.Gates DH, et al. Gait characteristics of individuals with transtibial amputations walking on a destabilizing rock surface. Gait Posture. 2012;36(1):33–9. doi: 10.1016/j.gaitpost.2011.12.019. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 26.Hak L, et al. Speeding up or slowing down?: Gait adaptations to preserve gait stability in response to balance perturbations. Gait Posture. 2012;36(2):260–4. doi: 10.1016/j.gaitpost.2012.03.005. [DOI] [PubMed] [Google Scholar]
- 27.Selgrade BP, Toney ME, Chang YH. Two biomechanical strategies for locomotor adaptation to split-belt treadmill walking in subjects with and without transtibial amputation. J Biomech. 2017;53:136–143. doi: 10.1016/j.jbiomech.2017.01.012. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 28.Reisman DS, et al. Split-belt treadmill adaptation transfers to overground walking in persons poststroke. Neurorehabil Neural Repair. 2009;23(7):735–44. doi: 10.1177/1545968309332880. [DOI] [PMC free article] [PubMed] [Google Scholar]