

Abstract
We introduce a method to recover a continuous domain representation of a piecewise constant two-dimensional image from few low-pass Fourier samples. Assuming the edge set of the image is localized to the zero set of a trigonometric polynomial, we show the Fourier coefficients of the partial derivatives of the image satisfy a linear annihilation relation. We present necessary and sufficient conditions for unique recovery of the image from finite low-pass Fourier samples using the annihilation relation. We also propose a practical two-stage recovery algorithm which is robust to model-mismatch and noise. In the first stage we estimate a continuous domain representation of the edge set of the image. In the second stage we perform an extrapolation in Fourier domain by a least squares two-dimensional linear prediction, which recovers the exact Fourier coefficients of the underlying image. We demonstrate our algorithm on the super-resolution recovery of MRI phantoms and real MRI data from low-pass Fourier samples, which shows benefits over standard approaches for single-image super-resolution MRI.
1 Introduction
Many studies in image processing show that natural images can be represented efficiently as piecewise smooth functions [39, 54, 15]. For instance, the Mumford-Shah formulation poses the recovery of a piecewise smooth image as a variational optimization problem that jointly estimates a segmentation of the image and the smooth functions on the regions defined by the segmentation [42, 43]. This problem is typically solved using iterative algorithms that alternate between the evolution a level-set curve and the recovery of the full signal [8, 60, 62]. These constrained level-set methods have been demonstrated to yield considerably improved reconstructions in challenging inverse problems [67, 32, 56, 3, 4, 17, 49]. Unfortunately, these algorithms are often slow and vulnerable to local minima problems, which restrict their utility in applications.
At the same time, the recovery of piecewise smooth one-dimensional signals using harmonic retrieval/linear prediction has been actively investigated in signal processing [37, 63, 40, 18, 2]. This includes the so-called finite-rate-of-innovation (FRI) framework [2] which extends Prony’s method [55, 13] to the recovery of a much wider class of signals, including non-uniform 1-D splines with unknown knot locations. The FRI framework is also related to the earlier work [25, 27, 37, 26], where Haacke and Liang proposed a super-resolution reconstruction technique for MRI using piecewise 1-D polynomial modeling. However, all of these techniques are fundamentally tied to the recovery of 1-D signals. While some extensions of 1-D FRI schemes to multidimensional polygonal signals are available [41, 52, 11], these specialized models do not provide good approximations of natural images. Recent work on atomic norm minimization can also be applied to the recovery of a weighted linear combination of 1-D Diracs at arbitrary locations from few Fourier samples [6, 59, 7]; these methods are off-the-grid continuous domain generalizations of compressed sensing theory [16, 1]. While the framework can account for piecewise constant 1-D signals by analyzing the derivative of the signal [6], and linear combination of Diracs in 2-D [66], its extension to piecewise constant signals in two or higher dimensions is not straightforward. For instance, the partial derivatives piecewise constant images have singularities supported on curves that bound the constant regions. We observe that this violates two of the main assumptions required for super-resolution recovery in [6]: (1) the number of singularities is finite, and (2) the singularities are well-separated. Moreover, the 2-D setting in [66, 34] fails to capture the extensive structure that is present in imaging applications. Namely, the image discontinuities are not often isolated, but are instead localized to smooth curves in 2-D.
Recently, Pan et al. [47] proposed an extension of FRI methods to recover piecewise complex analytic images in continuous domain. Specifically, they assume that the complex derivative of the image is supported on the zero level-set of a band-limited periodic function, called the annihilating polynomial. The authors rely on the annihilation of the Fourier transform of the derivatives by convolution with the Fourier coefficients of the annihilating polynomial to recover the edge set, and eventually the image. The work in this paper is mainly motivated by [47], and aims to overcome several of its limitations. For instance, the recovery of an arbitrary piecewise complex analytic signal from fintely many Fourier coefficients is ill-posed, since this class of functions has infinite degrees of freedom. Even in recovering the edge set, no sampling conditions that guarantee perfect recovery were available in [47]. Another problem is that the complex analytic signal model in [47] is not realistic for natural images.
The main focus of this paper is to develop a novel theoretical framework and efficient algorithms to recover piecewise constant images, whose discontinuities are localized to zero level-sets of band-limited functions, from few Fourier samples. We introduce a two step recovery scheme, which has similarities to Prony’s method and traditional FRI recovery. The first step involves the determination of the discontinuities of the image as the zero set of a band-limited function, which translates to a set of linear annihilation conditions in Fourier domain. Once the edge set is recovered, we recover the full image as the solution to an optimization problem. This work connects the classical Mumford-Shah algorithm, which alternates between level-set estimation and signal estimation, with FRI theory, which provides recovery guarantees from a finite number of Fourier samples.
Unlike the piecewise analytic model in [47], the number of degrees of freedom of our proposed piecewise constant representation is finite, which enables the successful recovery of the signal from finite number of Fourier coefficients. We introduce necessary and sufficient conditions for the recovery of the edge set and the edge set aware recovery of the signal. The one-to-one correspondence between the degree of the annihilating polynomial and the number of singularities in the signal, which is used to establish guarantees in the traditional FRI settings [63], cannot be exploited in our setting since the number of singularities is no longer finite. Instead, we introduce novel proof techniques based on the algebraic geometry of zero sets of trigonometric polynomials to establish the uniqueness guarantees.
We also introduce several refinements to make the two-step algorithm robust to noise and model mismatch. Since the model order–the number of coefficients necessary to describe the edge set–is not typically known in advance, we rely on a singular value decomposition of the block Toeplitz matrix corresponding to the linear annihilation relation for model order determination. Once the null-space of the matrix is estimated, we pose the extrapolation of the Fourier coefficients of the signal from the known samples as an optimization problem. The algorithm determines the signal such that the energy of the convolution between its Fourier coefficients and the null-space filters is minimized. We show that this approach is approximately equivalent to estimating the edge set as a sum of squares polynomial built from a basis of null-space filters. This approach is similar to the projection step in the multiple signal classification algorithm (MUSIC) algorithm [48], used in direction-of-arrival estimation and other signal processing applications.
We demonstrate the proposed two-stage recovery scheme on the the super-resolution of magnetic resonance (MR) images from low-resolution Fourier samples. The experiments show our scheme has benefits over other standard discrete spatial domain approaches to single-image super-resolution in MRI. In particular, our scheme is better able to resolve fine image features, preserve strong edges, and suppress noise artifacts. Our work is also fundamentally different from several super-resolution approaches in image processing and MRI, where edge information from other sources (co-registered high resolution datasets, anatomical information, etc.) is used to constrain reconstructions from few measurements; see e.g. [30, 65, 20, 33, 35, 29, 61, 38, 23]. Specifically, we seek to estimate the edge locations using only the partial Fourier data itself rather than using additional prior information. This approach can be viewed as a fully 2-D version of the 1-D super-resolution approach investigated in [25, 27, 37, 26].
Our work also has conceptual similarities to recent low-rank structured matrix completion methods in MRI [51, 28, 34]. In particular, [28] and [34] exploit the low-rank structure of a multi-fold Hankel matrix obtained built from Fourier samples. The low-rank property of the structured matrix results from assuming signal sparsity and other constraints. For example, in [28] MR images are modeled as signals with limited spatial support and smoothly varying phase. We observe that these image models are far less constrained than the piecewise constant model considered in this work, which makes them less suitable for super-resolution recovery. The model in [34] assumes that the signal sparse in a transform domain, i.e. consists of isolated singularities, which allows them to adapt the theory in [12] for recovery. In contrast, we model the partial derivatives of the continuous signal to be localized to curves. The direct extension of the theory from [12] as well as the traditional FRI setting is not possible in our context. Since our model captures the smoothness of the edge contours often found in images, it is more constrained than models like [34] that assume isolated discontinuities.
Preliminary versions of this work were presented in conference papers [45] and [44]. In particular, Theorems 1 and 2 were stated in [44] without proof. In addition to supplying the proofs of these results, we provide sampling guarantees for edge aware signal recovery that were absent in [44]. While the basic version of the two step algorithm presented here was introduced in [45], it is considerably generalized and validated using MRI data in this work.
1.1 Notation
We collect notation used throughout the paper here for easy reference. Bold lower-case letters x are used to indicate vector quantities, bold upper-case X to denote matrices, and calligraphic script for general linear operators. We typically reserve lower-case greek letters μ, γ, etc. for trigonometric polynomials (9) and upper-case greek letters Λ, Γ, etc. for their coefficient index sets, i.e. finite subsets of the integer lattice ℤ2, with cardinality denoted by |Λ|. A set of complex coefficients indexed by Λ is denoted by (c[k] : k ∈ Λ), which we also treat as a vector in ℂ|Λ| when convenient. We write Λ + Γ for the dilation of the index set Γ by Λ, i.e. the Minkowski sum {k +ℓ : k ∈ Λ, ℓ ∈ Γ}, and write 2Λ to mean Λ + Λ, 3Λ = + Λ, etc. We also denote the contraction of Γ by Λ by Γ : Λ = {ℓ ∈ Γ: ℓ − k ∈ Γ for all k ∈ Λ}. For two coefficient vectors c = (c[k] : k ∈ Λ) and d = (d[k] : k ∈ Λ), we denote their Hermitian inner product by . For any square-integrable functions f and g we use 〈f, g〉, to denote the usual Hermitian inner product . Finally, 〈D, φ〉 is also used to denote the dual pairing for a tempered distribution D acting on the Schwartz space of (complex) test functions φ.
2 Overview
We introduce a two step method to recover a piecewise constant image from few low-pass Fourier samples, assuming the edge set of the image is well-approximated by the zero level-set of a bandlimited function. In the first step, we estimate the edge set by solving for the level-set function. In the second step, we use the level-set function to perform an edge-aware recovery of the full signal. To make the presentation self-contained, and to motivate our proposed 2-D recovery scheme, we start with a brief review of FRI recovery of piecewise constant signals in 1-D.
2.1 Review of 1-D FRI theory
The FRI framework introduced in [63] can be viewed as an extension of Prony’s method to the recovery of a wide class of signals from sub-Nyquist sampling rates, including piecewise polynomial and non-uniform spline signals (similar extensions of Prony’s method for the recovery of 1-D piecewise polynomials was considered in Haacke and Liang’s earlier work [25, 27, 37, 26]). In order to draw parallels to our 2-D recovery scheme, we focus here on the FRI recovery of a continuous domain 1-D piecewise constant signal f : [0, 1] → ℂ, given as
| (1) |
from its low-pass Fourier coefficients
for some fixed N. In (1), 1U denotes the characteristic function of the set U, ai ∈ ℂ are the signal amplitudes, and 0 < x1 < x2 < ⋯ < xK < 1 are the edge locations. See Figure 1a for an illustration of this signal model and the two-step FRI recovery described below.
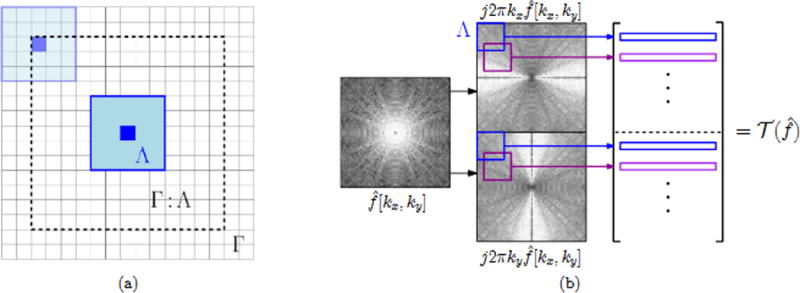
Figure 1. Overview of proposed extension of FRI to 2-D piecewise constant images.
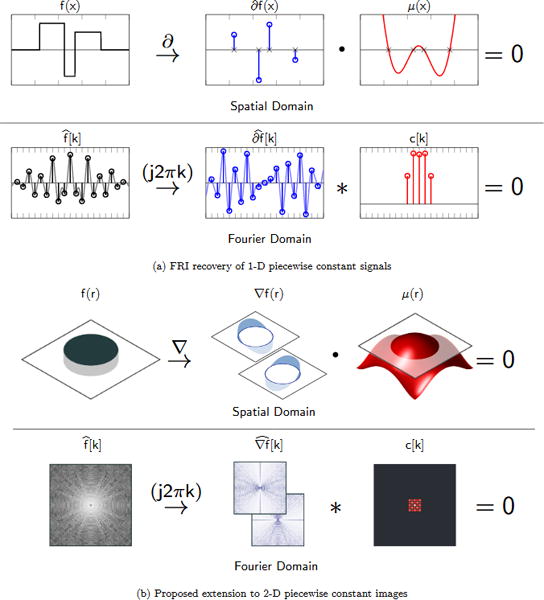
In (a) we illustrate the FRI recovery of a 1-D continuous domain piecewise constant signal f(x), as described in §2.1. The distributional derivative ∂f(x) is a stream of Diracs supported on the edge set of the signal. Hence, multiplication by a trigonometric polynomial μ(x) which is zero on the edge set will annihilate ∂f(x) in spatial domain. This descends to a linear convolution relation in Fourier domain. Therefore, given sufficiently many uniform low-pass Fourier samples we may compute , and form a linear system to solve for the finite Fourier coefficients c[k] of μ(x). In (b) we illustrate the proposed extension of this scheme to 2-D presented in §2.3. Here f(r), r = (x, y), is now the characteristic function for a region U in the plane. We show the distributional gradient of f is supported on the one-dimensional edge set ∂U. Multiplication by a trigonometric polynomial μ(r) which vanishes on ∂U will annihilate ∇f in spatial domain, and this likewise translates to a linear convolution annihilation relation in Fourier domain, which we may use to solve for coefficients c[k] of μ(r).
First, observe that the derivative ∂f (in the sense of distributions) is a stream of Diracs:
| (2) |
where bi = ai − ai−1, for i = 1, …, K with aK = a0 = 0. Therefore, the Fourier coefficients of ∂f are a linear combination of exponentials
| (3) |
which can be computed from the known samples by the Fourier domain relation . Recovering f now reduces to estimating the 2K unknown parameters from the known 2N + 1 samples. This can be achieved using Prony’s method, or one of its robust variants [13]. The solution relies on determining the so-called annihilating polynomial, i.e. the trigonometric polynomial defined as
| (4) |
which is zero at each of the edge locations , and these are its only zeros. An easy computation shows that the Fourier coefficients are annihilated by convolution with the annihilating polynomial coefficients c[k]:
| (5) |
This can also be seen from fact that in spatial domain,
in the sense of distributions. Therefore, provided we have at least 2K contiguous samples of (i.e. N ≥ K) we can form a linear Toeplitz system from (5), and solve for the K + 1 unknown coefficients c[k]. This allows us to recover the edge locations as the roots of μ(x). Then we may solve for the coefficients bi, and hence the amplitudes ai, by substituting the into the model (3) and solving an overdetermined linear system.
The main tool enabling FRI recovery is the existence of a trigonometric polynomial whose zero set coincides with the edge locations of the piecewise constant signal, or equivalently, the singularities of its derivative. Similar to [47], we propose extending this scheme to 2-D by considering the infinite one-dimensional zero sets of two-variable trigonometric polynomials.
2.2 Image Model
We focus on a continuous domain representation of images, that is, as functions f : ℝ2 → ℂ with compact support. For simplicity we will assume the support is always contained within [0, 1]2. We are particularly interested in images that can be modeled as 2-D piecewise constant functions
| (6) |
where ai ∈ ℂ, and 1U is the characteristic function of the region U:
| (7) |
Here we assume each region Ui ⊆ [0, 1]2 has piecewise smooth boundary ∂Ui. We also assume the representation (6) is expressed with the fewest number of characteristic functions such that the regions Ui are pairwise disjoint. In this case the set of discontinuous points of f coincides with , which we call the edge set of the image.
Our aim is to recover the piecewise constant image f(r) from few of its Fourier coefficients
| (8) |
where Γ is some finite sampling set. Without any further assumptions on the edge set, unique recovery of images in the form (6) from finitely many Fourier samples is clearly ill-posed since the class of piecewise smooth curves has infinite degrees of freedom. Hence, we restrict the edge set to belong to a parametric model described by finitely many parameters. Motivated by the FRI curves framework [47], we will constrain the edge set to be the zero set of a 2-D band-limited periodic function:
| (9) |
where the coefficients c[k] ∈ ℂ, and Λ is any finite subset of ℤ2. We call any function μ described by (9) a trigonometric polynomial, and the zero set C = {μ = 0} a trigonometric curve, provided C is infinite and has no isolated points. Note a piecewise constant image cannot have isolated points in its edge set, so this restriction on the zero set is fully compatible with our image model. We elaborate more on the properties of trigonometric curves in §2.4; see also Fig. 2.
Figure 2. Examples of trigonometric curves.
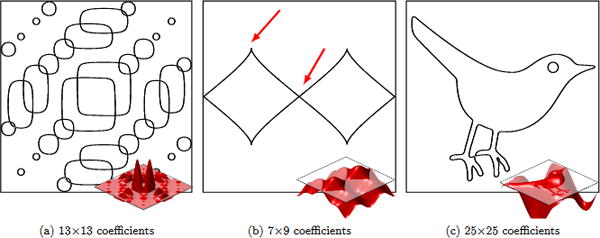
The one-dimensional zero sets of two-variable trigonometric polynomials are a topologically diverse class of plane curves, which can (a) have many distinct curve components, (b) non-smooth cusps and self-intersections (indicated by arrows), and (c) approximate arbitrary plane curves using few coefficients. Shown inset is a surface plot of the trigonometric polynomial whose zero set gives the corresponding trigonometric curve.
2.3 Annihilation property for piecewise constant images
The annihilation relation (5) for 1-D piecewise constant signals uses the fact that the derivative of the signal can be represented as a sum of isolated Diracs. Similar annihilation relations extend to multidimensional signals when they can expressed as sum of isolated Diracs in a transform domain [52, 11, 34]. However, the derivative of a piecewise constant image cannot be represented as a sum of isolated Diracs, which prohibits the direct extension of these methods to our setting. However, [47] showed it is still possible to derive an annihilation relationship for 2-D complex analytic signals having singularities supported on trigonometric curves (9). Similarly, we now show that the Fourier coefficients of the partial derivatives of piecewise constant images (6) having edge set described by a trigonometric curve satisfy a 2-D annihilation relation in Fourier domain.
First consider the case of a single characteristic function 1U where U is a simply connected region with piecewise smooth boundary ∂U. We will show that the product of the gradient of 1U by any smooth periodic function ψ vanishing on ∂U is identically zero:
| (10) |
However, since 1U is non-smooth, the above equality can only be understood in a weak sense. In particular, we will find it useful to interpret the partial derivatives of 1U as tempered distributions, i.e. as linear functionals acting on test functions of Schwartz class (see, e.g., [57] or [19]). Since the domain [0, 1]2 is compact, in this case coincides with all C∞ smooth complex-valued periodic functions on [0, 1]2. Letting denote any such test function, we have:
| (11) |
where the last step follows by Green’s theorem. Likewise, one can show
| (12) |
We can generalize the above relation to the gradient ∇1U = (∂x1U, ∂y1U) by considering it to be a distribution acting on test fields φ = (φ1, φ2) where φ1, . For all such φ we have
| (13) |
where n is the unit outward normal to the curve ∂U.
Now suppose ψ is any smooth function that vanishes on ∂U, i.e. ψ(r) = 0 for all r ∈ ∂U. Since ψ is smooth the product ψ∇1U is well-defined as a tempered distribution, and for all test fields φ we have
| (14) |
Therefore we have shown (10) holds in the distributional sense. The preceeding analysis easily generalizes to piecewise constant functions by linearity: if f is a piecewise constant function (6), and ϕ is any smooth function that vanishes on the edge set , then
| (15) |
Now assume that ϕ = μ is a trigonometric polynomial, and hence is described by a finite number of Fourier coefficients, which we denote by (c[k] : k ∈ Λ), where Λ ⊆ ℤ2 is its finite Fourier support set. Taking Fourier transforms of (15), and applying the convolution theorem for tempered distributions yields the following annihilation relation:
Proposition 1
Let be piecewise constant where edge set is a subset of the trigonometric curve {μ = 0}. Then the Fourier coefficients of the gradient of f are annihilated by convolution with the Fourier coefficients (c[k] : k ∈ Λ) of μ, i.e.
| (16) |
where .
Due to the above property, we call μ an annihilating polynomial for f, and the coefficients (c[k] : k ∈ Λ) an annihilating filter. We show in §3 that the above Fourier domain annihilation relation can be used to recover an annihilating polynomial, and hence the edge set, from finitely many low-pass Fourier coefficients of the image.
We note that a similar annihilation relationship to (16) was derived for piecewise complex analytic signals in [47]. Specifically, in [47] it is shown that functions f(z) = f(x + jy) complex analytic on a region U with boundary ∂Ω given by a trigonometric curve {μ = 0} satisfy the annihilation relation
| (17) |
where is the complex Wirtinger derivative. While the proofs in [47] rely on a representation of f as a complex curve integral, (17) can also be understood in terms of distributions. Also note that if f is piecewise constant, then it satisfies (17). The main difference with our approach is that we assume that both partial derivatives of f are jointly annihilated by μ. This rules out functions f that are non-constant inside the regions defined by the curve {μ = 0}.
2.4 Properties of the edge set model: Trigonometric curves
Our image model, which assumes the edge set coincides with a trigonometric curve (9), may seem overly restrictive at first. However, trigonometric curves can represent a wide variety of curve topologies, even with relatively few coefficients. For instance, trigonometric curves can have multiple connected components, non-smooth cusps, and can self-intersect in complicated ways. Moreover, any compactly supported plane curve can be approximated to an arbitrary degree of accuracy by a trigonometric curve, provided the number of coefficients is large enough; see Fig. 2.
Trigonometric curves can be characterized in terms similar to algebraic plane curves, i.e. the zero sets of polynomials in two complex variables. In particular, one can associate with every algebraic plane curve a unique minimal degree polynomial whose zero set generates the curve. Similarly, we prove there is a unique minimal degree trigonometric polynomial associated with any trigonometric curve C, which we call the minimal polynomial for C. Here we define the degree of a trigonometric polynomial μ to be the dimensions of the smallest rectangle that contains the frequency support set Λ, which we denote as deg(μ) = (K, L). In Appendix A we prove the following:
Proposition 2
For every trigonometric curve C there is a unique (up to scaling) real-valued trigonometric polynomial μ0 with C = {μ0 = 0} such that for any other trigonometric polynomial μ with C = {μ = 0} we have deg(μ0) ≤ deg(μ) componentwise.
This proposition shows trigonometric curves can always be described as the zero set of a real-valued trigonometric polynomial, a property we will use implicitly from now on. Moreover, it allows us to uniquely define the degree of a trigonometric curve as the degree of its associated minimal polynomial. Intuitively, the degree also gives some measure of inherent complexity of a trigonometric curve. For example, the degree puts bounds on how many non-smooth points the curve may have and the number of connected curve components. One particularly important bound for this work is the following:
Proposition 3
If C is a trigonometric curve of degree (K, L), then the number of connected components of the complement set [0, 1]2/C is at most 2KL.
Consequently, a piecewise constant image with edge set given by a trigonometric curve of degree (K, L) cannot consist of more than 2KL distinct regions, i.e. the number of terms in the sum (6) is bounded by 2KL. This means the total degrees of freedom of such an image is at most roughly 3KL, since we need at most (K + 1)(L + 1) parameters to describe the edge set, and at most 2KL parameters for the region amplitudes.
Some further topological and algebraic properties of trigonometric curves and minimal polynomials can be found in Appendix B, which are used in proofs of the sampling theorems in §3 and §4.
3 Recovery of edge set from finite Fourier samples
In this section, we focus on sampling guarantees for the first step of our recovery scheme. We give necessary and sufficient conditions on the number of samples required for unique recovery of the edge set of the signal from the annihilation relation. Similar sampling guarantees for edge-aware recovery of the full signal are provided in the next section.
Let f be any piecewise constant image (6) whose edge set is described by a trigonometric curve {μ = 0} where μ is a trigonometric polynomial with coefficients (c[k] : k ∈ Λ). If we have access to all Fourier samples for all k ∈ Γ, then from the annihilation relation (16) we can form the finite linear system of equations:
| (18) |
where the index set Γ : Λ ⊆ ℤ2 is the set ℓ ∈ ℤ2 such that ℓ−k ∈ Γ for all k ∈ Λ. Assuming Λ is symmetric i.e. for all k ∈ Λ we have −k ∈ Λ, then Γ : Λ is the simply the set of all integer shifts ℓ such that the translated support Λ + ℓ is contained in Γ. Here the expression is computed from the known samples using the Fourier domain relations , and , for any k = (kx, ky) ∈ ℤ2. Provided we have enough samples of to construct a determined linear system of equations (18), we can potentially solve for the unknown coefficients (c[k] : k ∈ Λ). We now derive conditions for the necessary and sufficient number of samples needed for unique recovery via the linear system (18).
3.1 Necessary condition for recovery of edge set
Suppose we know the exact Fourier support Λ ⊆ ℤ2 of the minimal polynomial μ describing the edge set of the image, and let Γ ⊆ ℤ2 be an arbitrary sampling set. To allow for the unique recovery of the coefficients (c[k] : k ∈ Λ) of μ by solving (18), we need enough equations so that the nullspace of the system is at most one-dimensional. This means we need the number of equations to match |Λ| − 1. For every shift of the filter support Λ contained in the sampling set Γ, i.e. every ℓ ∈ Γ : Λ, we obtain two equations corresponding to each partial derivative. Therefore, a necessary condition for the recovery of the (c[k] : k ∈ Λ) is
| (19) |
However, in general we will not know in advance the exact Fourier support of the minimal polynomial. To gain some intuition on the number of samples required to recover the signal, we focus on the case of rectangular Fourier supports. In particular, we assume the degree of the minimal polynomial is known, i.e. the dimensions of the smallest rectangle containing the true Fourier support. Recall that the degree also gives some measure of the complexity of the edge-set (see Prop. 2 & Prop. 3). To recover the minimal polynomial coefficients, we can instead solve (18) for all coefficients within the minimal rectangular support ΛR. When the sampling set Γ is also rectangular, by counting shifts of ΛR in Γ, the expression in (19) reduces to the following necessary condition:
Proposition 4
Let f be piecewise constant with edge set described by a trigonometric curve of degree (K, L). A necessary condition to recover the edge set from the annihilation equations (18) is to collect samples on a (K′ + 1) × (L′ + 1) rectangular grid in ℤ2 with K′ ≥ K and L′ ≥ L such that
To illustrate this bound, suppose μ has degree (K, L), and we take Fourier samples from a rectangular grid of size (1 + α)K × (1 + α)L, α > 0. Then it is necessary that , or that we collect roughly 3KL Fourier samples to recover the edge set.
Our numerical experiments on simulated data (see Fig. 3) indicate the above necessary conditions might also be sufficient for unique recovery; that is, we hypothesize the coefficients of the minimal polynomial are the only non-trivial solution to the system of equations (18) whenever it is fully determined.
Figure 3. Exact recovery of edge set from the minimum necessary number of Fourier samples.
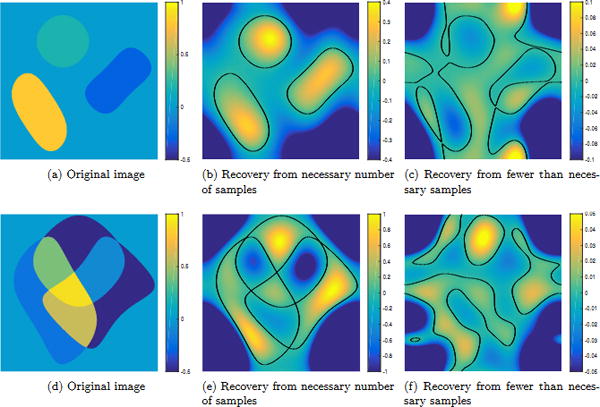
The piecewise constant images shown in (a)&(d) were generated to have edge set given by the trigonometric curve {μ = 0} of degree (6, 6), i.e. the known minimal polynomial μ is described by 7 × 7 coefficients. We recover μ by solving the linear system (18) built from 11 × 11 Fourier samples of the original image, which were approximated numerically to high precision. This is the necessary minimum number of samples specified by Prop. 4, and is less than the sufficient number of samples specified by Thm. 2 (19×19 samples). The recovered minimal polynomial μ is shown in (b)&(e) with {μ = 0} plotted in black; we observe the recovered coefficients match the known minimal polynomial coefficients to within machine precision. In (c)&(f) we show a solution obtained from fewer than the necessary minimum number of samples. Note that in this case the true edge set does not coincide with the zero set of the recovered trigonometric polynomial.
3.2 Sufficient conditions for recovery of edge set
We now focus on sufficient conditions for the recovery of the edge set of a piecewise constant image, or equivalently, the coefficients of its minimal polynomial, from (18). For simplicity, we first state our result in the case of a single characteristic function. We give the proof of this result, and all the remaining proofs in §3–5, in Appendix B.
Theorem 1
Let f = 1U be the characteristic function of a simply connected region U with boundary ∂U = {μ = 0}, where μ is the minimal polynomial. Then the coefficients c = (c[k] : k ∈ Λ) of μ can be uniquely recovered (up to scaling) from samples of in 3Λ as the only non-trivial solution to the equations
| (20) |
The proof of Theorem 1 entails showing any other trigonometric polynomial η having coefficients (d[k] : k ∈ Λ) satisfying (20) must vanish on ∂U. From this it follows that η is a scalar multiple of μ by properties of minimal polynomials. We now extend the above result to piecewise constant signals, provided the boundaries of the regions do not intersect:
Theorem 2
Let be piecewise constant such that the boundary curves ∂Ui, i = 1, …, n, are connected, pairwise disjoint, and given by trigonometric curves: ∂Ui = {μi = 0}, where μi is the minimal polynomial. Then, the coefficients c = (c[k] : k ∈ Λ) of μ = μ1 ⋯ μn, and equivalently the edge set , can be uniquely recovered (up to scaling) from samples of in 3Λ as the only non-trivial solution of
| (21) |
We remark that the proof of Theorem 2 can be adapted to many instances where the boundary curves are allowed to intersect, provided we take slightly more samples than 3Λ. The number of additional samples required depends on the precise intersection geometry, and is difficult to characterize for arbitrary curves, and so we do not state a general result here.
Note the sampling requirement of 3Λ in Theorems 1 and 2 is greater than the necessary number of samples given in Prop. 4. For example, if the edge set has degree (K, L), the necessary number of samples is roughly 3KL whereas the sufficient number is roughly 9KL. In other words, there is a gap in our results between the necessary and sufficient number of samples needed for unique recovery of the edge set. We conjecture that Theorems 1 and 2 can in fact be sharpened to the necessary number of samples, and extended to edge sets with arbitrary intersection.
Finally, we provide a generalization of Theorem 2 that will be useful in practical applications when the degree of the edge set is unknown. Specifically, assume that the system (18) is built with a larger coefficient support set Λ′ than the minimal support Λ. In this case the solution to (18) is not necessarily unique: any multiple of the minimal polynomial η = μγ such that γ has coefficients in Λ′ : Λ is also a solution. This is because η satisfies {μ = 0} ⊆ {η = 0}, hence is also an annihilating polynomial. We now show that every solution to (18) must be the coefficients of a multiple of the minimal polynomial, under the same restriction as Theorem 2:
Theorem 3
Let f be as in Theorem 2. Suppose μ = μ1 ⋯ μn has coefficients in Λ, and let Λ′ be another index set with Λ ⊆ Λ′. If the coefficients (d[k] : k ∈ Λ′) of a trigonometric polynomial η are a non-trivial solution of
| (22) |
then μ divides η, that is η = μγ where γ is another trigonometric polynomial with coefficients supported in Λ′ : Λ.
4 Edge set aware recovery of the image
In this section we establish conditions for the unique recovery of a piecewise constant image from few of its low-pass Fourier samples with knowledge of the minimal polynomial describing its edge set. We will study the problem of identifiability of the signal in continuous domain: given ideal Fourier samples , k ∈ Γ, and the minimal polynomial μ, when is f is the unique function satisfying the annihilation relation, μ∇f = 0? Here we will restrict solutions f to belong to L1([0, 1]2), and interpret ∇f in a a distributional sense. First, we show any function g ∈ L1([0, 1]2) satisfying the annihilation relation can be compactly parametrized as a piecewise constant function:
Proposition 5
Let μ be any trigonometric polynomial. Suppose g ∈ L1([0, 1]2) satisfies the annihilation relation
| (23) |
where equality holds in the distributional sense. Then, g can be parameterized as the piecewise constant function
| (24) |
almost everywhere, where bi ∈ ℂ and Ui are the connected components of {μ = 0}C.
The above proposition implies that the full recovery of the piecewise constant image now simplifies to the estimation of the unknown amplitudes bi, provided the regions Ui are known. One approach of recovering the signal then would be to substitute the parametric model (24) back into the annihilation system (18), and solve for the unknown amplitudes, analogous to the amplitude recovery step in Prony’s method. However, this direct approach is not feasible in practice, since to identify the regions Ui would require us to factor a high degree multivariate polynomial having arbitrary complex coefficients. For this reason, obtaining an exact off-the-grid parametric representation of the full signal in spatial domain is especially challenging in our setting.
We avoid this direct approach and instead pose recovery as the solution to the following optimization problem in spatial domain:
| (25) |
where ‖·‖ is any suitable norm. Alternatively, we can solve for the solution entirely in Fourier domain:
| (26) |
where c = (c[k] : k ∈ Λ) are the finitely supported coefficients of the minimal polynomial μ, ∗ denotes discrete 2-D convolution, and again ‖·‖ is some suitable norm. In the formulation (26), the solution is an extrapolation in Fourier domain from the known samples in Γ to the unknown coefficients, which can be viewed as a linear prediction in 2-D. Note that (25) and (26) are still infinite-dimensional optimization problems, and not solvable in practice. However, (25) and (26) will motivate the practical algorithms we introduce in §5. We now derive necessary and sufficient conditions for the unique recovery of the signal from (25) or equivalently (26).
4.1 Necessary conditions
A piecewise constant function g in the form (24) with known regions has n remaining degrees of freedoms corresponding to the unknown region amplitudes . Hence the necessary minimum number of samples for unique recovery of the full signal—using any algorithm—is n. However, typically this quantity will be much smaller than the number of available samples required to estimate the edge set. For instance, if the edge set of the image is a trigonometric curve of degree (K, L), then by Proposition 3, then the number of distinct regions of the image is at most 2KL. However, by Proposition 4 the necessary minimum number of samples required to uniquely reconstruct the edge set from the annihilation equations is roughly 3KL, which is more than the maximum bound on the number of regions.
Here we note the parallels with Prony’s method and 1-D FRI theory: To recover a signal with K singularities it is necessary (and sufficient) to collect 2K + 1 uniform Fourier samples [63]. In the first stage, the full 2K + 1 samples are used to identify the locations of the singularities. However, in the second stage only K of the 2K +1 samples are necessary (and sufficient) to recover the signal amplitudes. Likewise, in our setting, once the necessary number of samples is obtained to reconstruct the edge set, no further samples should be needed to recover the amplitudes.
4.2 Sufficient conditions
Under the same non-intersecting assumption on the edge set of the piecewise constant function f as in the Theorems of §3, we can show the low-pass samples of are sufficient to uniquely identify f from the annihilation relation with knowledge of minimal polynomial. Specifically, we show that f is identifiable from samples of in Λ, the coefficient support set of the minimal polynomial:
Theorem 4
Let f be as in Theorem 2, with known minimal polynomial μ having coefficients in Λ, and let the Fourier sampling set Γ ⊇ Λ. If g ∈ L1 ([0, 1]2) satisfies
| (27) |
then g = f almost everywhere.
Again, we conjecture that this result also holds for piecewise constant functions having an edge set described by an arbitrary trigonometric curve C, not just those consisting of non-intersecting curves.
This result shows one benefit of our piecewise constant image model versus the piecewise complex analytic signal model considered in [47]: in the piecewise constant case, recovery from the annihilation relation given finitely many Fourier samples is well-posed. However, this is not the case for piecewise analytic signals using the annihilation relation (17), as considered in [47]. This is because, in analogy with Proposition 5, one can show
| (28) |
if and only if g is complex analytic on each connected component Ui of {μ = 0}C. Or, equivalently:
| (29) |
where hi is any function complex analytic on Ui. Signals in this class have infinite degrees of freedom since each hi(z) is described by infinitely many complex parameters, namely its power series coefficients. Therefore, recovery of the signal g from the annihilation relation (28) given finitely many Fourier samples is ill-posed. In particular, for any finite Fourier sampling set Γ, there are infinitely many signals g in the form (29) satisfying , for all k ∈ Γ.
4.3 Recovery from finitely many annihilation equations
The conditions derived in §4.1 and §4.2 settle the problem of unique recovery from using the infinite dimensional annihilation relation (27). A more subtle question, relevant to practical applications, is whether the Fourier extrapolation solution is uniquely determined from finitely many annihilation equations, i.e. for some large extrapolation set Δ ⊆ ℤ2, and some small sampling set Γ ⊆ ℤ2 do the conditions
| (30) |
imply for all k ∈ Δ? In other words, given few samples of imply of and knowledge of the minimal polynomial coefficients (c[k] : k ∈ Λ), can we uniquely extrapolate to a larger grid Δ ⊆ ℤ2 using the Fourier domain annihilation relation (30)? Note that (27) may be thought of as the limiting case of (30), where the extrapolation set Δ expands to all of ℤ2. Our numerical experiments (see Fig. 4) indicate that, given the minimal polynomial, unique recovery is in fact possible from (30) with the necessary minimum number of samples given in §4.1. We hypothesize that a sufficient condition analogous to Theorem 4 also holds in this case. However, establishing this condition is less straightforward than in the infinite dimensional setting (27) since in this context we lack the parameterization result (24). We plan to pursue this question in a future work.
Figure 4. Edge set aware recovery of synthetic data.
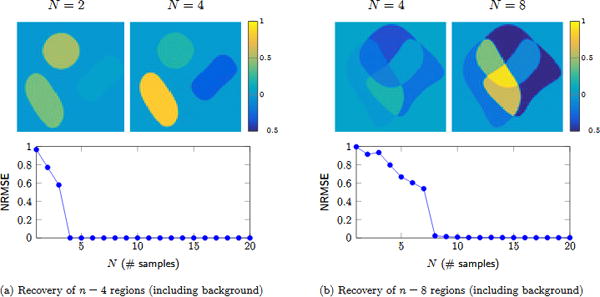
Piecewise constant images with n = 4 and n = 8 distinct connected regions (including the background region) were generated with edge set given by a known minimal annihilating polynomial having 7×7 coefficients (as shown in Fig. 3). Choosing N samples uniformly at random from the 7×7 center Fourier coefficients of the image, we extrapolate the image in Fourier domain to 65×65 coefficients by solving (30) in a least-squares fashion. We plot the normalized root mean square error (NRMSE) of the recovery averaged over ten trials. Pictured above the plots is the inverse DFT of a reconstruction obtained from the indicated number of samples N. Note that in both cases we are able to recover the image nearly exactly from the necessary minimum number of samples, N = 4 and N = 8 respectively, corresponding to the number of regions. Below this number, we still recover the Fourier coefficients of a piecewise constant image, however one with the incorrect region amplitudes.
5 Algorithms
We rely on a two step algorithm similar to Prony’s method, which involves (1) the estimation of the edge set of an image (2) the edge set aware recovery of the image. Theorems 2 and 3 together guarantee the unique recovery of the edge set from the linear annihilation relation (18), while Theorem 4 guarantees the unique recovery of the full piecewise constant image given its edge set. However, these guarantees only hold under ideal conditions, making direct estimation of the signal from (18) infeasible in practice. Here we introduce robust refinements of this procedure to enable recovery of the image in the presence of noise or model-mismatch.
5.1 Step 1: Estimation of an annihilating subspace
Directly estimating the edge set via the linear system (18) in practical applications is challenging due to the following problems:
Model-order selection: Theorems 2 and 3 assume the knowledge of the degree of the minimal polynomial describing the edge set of the image. However, this is often unknown in practical applications.
Noise and model-mismatch: The available Fourier samples are often corrupted by noise in practical settings. In addition, the assumption that the underlying image is piecewise constant with edge set described by a trigonometric curve will only be approximately true in practice.
We now introduce efficient approaches to overcome the above problems. The key idea is that rather than estimating a single annihilating filter, we estimate an entire annihilating subspace—a collection of linearly independent annihilating filters which jointly encode the edge set. This can be thought of as an extension of subspace methods in spectral estimation to the 2-D setting. Specifically, we draw parallels between our algorithm and the well-known MUSIC algorithm [48]. This gives us an efficient means to address the model-order selection problem. We also introduce an efficient algorithm for the robust estimation of the annihilating subspace in §5.1.2, which address the problem of model-mismatch and noisy measurements. This scheme is related to Cadzow denoising methods [5, 14] used for robust spectral estimation, and recent low-rank structured matrix completion approaches in MRI [28, 34]. Finally, once the annihilating subspace is estimated, in §5.2 we propose recovering the piecewise constant signal in Fourier domain by constraining its extrapolated Fourier coefficients to be orthogonal to the annihilating subspace.
For convenience, we rewrite the annihilation system (18) in matrix notation. First, we fix rectangular index sets Γ, Λ ⊆ ℤ2, which represent the sampling set, and annihilating filter support, respectively, and set N = |Γ : Λ|, M = |Λ|. Define and to be the linear operators mapping samples to matrices and which represent the discrete convolution of and with filters (c[k] : k ∈ Λ), whose output is restricted to the index set Γ : Λ. In particular, and are block Toeplitz matricies with Toeplitz blocks, where the rows of indexed by ℓ ∈ Γ:Λ are given by in vectorized form, and similarly for ; see Fig. 5. Finally, we define the linear operator as the vertical concatenation of and , i.e.
| (31) |
Treating c = (c[k] : k ∈ Λ) as vector in ℂM we may reproduce the annihilation system (18) by writing
Therefore, recovering an annihilating polynomial for f is equivalent to finding a vector in the nullspace of the structured matrix , which we call the annihilation matrix.
Figure 5. Construction of the annihilation matrix.
Shown in (a) are the index sets in used to construct the annihilation matrix defined in (31). Here Γ in is the set of Fourier sampling locations, Λ (in black) is the assumed annihilating filter support, and Γ : Λ (interior of dashed line) is the set of all integer shifts ℓ such that Λ shifted by ℓ is contained in Γ. The construction of is shown schematically in (b). From known samples for (kx, ky) ∈ Γ we compute and by a Fourier domain multiplication. Then each row of is obtained by vectorizing a rectangular Fourier domain patch of size Λ from the computed samples of and
We note that our annihilation matrix is structurally similar to the to the multi-fold Hankel matrix construction in the matrix enhancement pencil matrix (MEMP) method, used for 2-D harmonic retrieval [31, 12]. The main difference in our construction is that we apply weights j2πk to the Fourier data before creating the structured matrix. Also, similar multi-fold Toeplitz/Hankel liftings of Fourier data have been considered in MRI reconstruction problems to model spatially limited and phase constrained images [51, 28], and to model transform sparse images [34]. Similar to us, [34] also applies weights to Fourier data before constructing the structured matrix. However, our construction (31) is unique in that we consider joint annihilation of both partial derivatives with respect to a common filter.
5.1.1 Annihilating subspace estimation
When the degree of the minimal polynomial associated with the edge set is unknown in advance—which will typically be the case—we cannot build the annihilation matrix with the correct filter support to ensure its null space is one-dimensional. For instance, if the assumed filter support Λ′ is strictly larger than support Λ of the minimal filter (c[k] : k ∈ Λ), the annihilation matrix will have a larger null space. This is because any filter of the form c * d having Fourier support contained in Λ′ is also an annihilating filter by the associativity of convolution. In fact, Theorem 3 says that under certain conditions on f, every null space vector of is of this form. Hence, under these conditions, is rank deficient with the following bound:
Proposition 6
Let f be a piecewise constant image with edge set C = {μ = 0}, where μ is the minimal polynomial with coefficients in Λ. If the assumed annihilating filter support Λ′ strictly contains Λ, then
| (32) |
Furthermore, equality holds if f satisfies the conditions of Thm. 2 and if the sampling set Γ ⊆ 2Λ + Λ′.
We call the null space of the annihilating subspace. Since identifying the minimal annihilating filter within the annihilating subspace when it has large dimension is challenging, we propose to leverage the entire annihilating subspace for both edge set estimation and image reconstruction.
Observe that the edge set is still uniquely recoverable from the annihilating subspace under ideal conditions. To see this, let D = [d1, …, dR] be any orthonormal basis for the annihilating subspace. Define μi to be the trigonometric polynomial having coefficients given by di. By the preceding discussion μi must always have the form μi = γi μ for μ the minimal polynomial and γi another trigonometric polynomial. We define a function as the following sum-of-squares average
| (33) |
Note we always have when μ(r) = 0. We can also prove the following:
Proposition 7
The function has at most finitely many zeros on [0, 1]2/{μ = 0}.
Therefore, we can identify the edge set by finding the zeros of , and removing any isolated points. This method of estimating the edge set can also be interpreted as a higher dimensional analogue of the technique used in spectral MUSIC to estimate the locations of isolated spectral peaks [48]. Recall that with spectral MUSIC one performs this estimate by computing the distance of pure exponential signals from a particular eigenspace of the signal covariance matrix. The following result shows we may also interpret in an analogous way:
Proposition 8
Let D ∈ ℂM×R be an orthonormal basis of the nullspace of , and for all r [0, 1]2, define the filter er ∈ ℂM by er[k] = ej2πk·r for all k ∈ Λ. Then we have
that is, is the ℓ2-norm of the projection of er onto the annihilating subspace.
While we do not directly estimate the edge set in this fashion, the function will play an important role in the second step of our proposed algorithm in §5.2.
5.1.2 Annihilation subspace estimation in the presence of noise
When the measurements are corrupted by noise or there is model mismatch, we propose performing a denoising step to better identify the annihilating subspace. This denoising step is similar to Cadzow methods used in FRI algorithms [2, 47], as well as recently proposed algorithms for structured low-rank matrix completion problems [28, 12, 46, 34]. Given noisy Fourier samples , k ∈ Γ, where we assume n[k] is a vector of i.i.d. mean-zero Gaussian noise, we attempt find the closest in Euclidean norm that satisfies the rank bound in Proposition 6:
| (34) |
Here the parameter r is estimated according to (32). This can be viewed as a maximum likelihood estimation, where the rank constraint on enforces our modeling assumption; see [14] for a similar approach in 1-D. Note the rank constraint in (34) is non-convex, which means in general we are only able to compute an local minimizer of (34). One common heuristic for solving problems of the type (34) is to perform a Cadzow denoising on a lifted matrix. However, as observed in [47], this procedure is slow to converge in this context. Instead, we attempt to solve (34) more directly with a variable splitting approach adopted from [28]:
| (35) |
where λ is a regularization parameter balancing data fidelity and the low-rank penalty term. This suggests the following alternating minimization scheme: set and for n ≥ 1, solve
| (36) |
| (37) |
The exact solution to subproblem (36) is easily computed by taking the singular value decomposition of , and setting Tn+1 = UΣrV*, where Σr is the diagonal matrix of singular values σi with σi = 0 for all i > r. Also, subproblem (37) is quadratic in , and has an exact solution given by , where the operations above are understood element-wise. Here denotes the adjoint of , which computes a weighted sum of entries of T ∈ ℂ2N×M. In particular, one can show is a diagonal matrix. Due to the alternating scheme, the cost in (35) is guaranteed to monotonically decrease with updates (37). A detailed convergence analysis of the algorithm is beyond the scope of this work; further analysis can be found in [28]. However, we observe the algorithm converges well in practice. In all our experiments conducted in §6 a suitable solution was reached in 5–10 iterations.
5.2 Step 2: Edge set aware image recovery
We now focus on the edge-aware recovery of the image using (26), which amounts to the Fourier domain extrapolation of the measured samples. This recovery can still be considered as “off-the-grid”, in the sense that we reconstruct the exact Fourier series coefficients of the underlying continuous domain image. We will also briefly consider the case where we solve for the image “on-the-grid” in spatial domain similar to [47].
5.2.1 Fourier domain recovery: Extrapolation by linear prediction
Suppose that we have an estimate of a basis for the annihilating subspace D = [d1, …, dR]. Motivated by the Fourier domain recovery formulations (26) and (30), we pose the recovery of the Fourier domain of the signal within an arbitrary rectangular domain Δ ⊆ ℤ2 as
| (38) |
i.e. we extrapolate the signal by enforcing its Fourier derivatives to be annihilated by filters in the annihilating subspace. Here we restrict the convolution to the valid region Δ: Λ ⊂ ℤ2. When the measurements are corrupted by noise (i.e. , k ∈ Γ, where n is a vector i.i.d. complex white Gaussian noise), we relax the equality constraint in (38) and instead solve
| (39) |
Here, λ is a tunable parameter balancing annihilation and data fidelity, and PΓ is projection onto the sampling set Γ. Note that (39) is a linear least-squares problem, and can be solved efficiently with a conjugate gradient iterative solver, provided we have an fast method of computing matrix-vector products with the gradient of the objective in (39). Towards this end, we rewrite (39) in terms of a linear operator acting on :
| (40) |
where ‖ · ‖F denotes the Frobenius norm. We can express as
| (41) |
with Mx and My representing elementwise multiplication by j2πkx and j2πky, respectively, Ci discrete convolution with the annihilating filter di, and P projection onto the index set Δ : Λ. Note that since is restricted to Δ, we may take Ci to be a 2-D circular convolution, provided we zero-pad the filter di and the input sufficiently. Thus, we can write Ci = F SiFH where F is the 2-D DFT on any rectangular grid containing the set Δ + Λ, and Si is elementwise multiplication by the inverse DFT of di, which is given by a spatial gridding of the annihilating polynomial μi(r) having coefficients di.
Taking the gradient of the objective in (40) and setting it to zero yields
From (41), the operator can be expanded as
| (42) |
Unfortunately, when the number of annihilating filters is large (i.e. R is large), applying this operator directly will be computationally costly, requiring 8R two-dimensional FFT operations per application. However, if the resolution of the reconstruction grid Δ is large enough, the projection operator P*P will be close to the identity matrix I. Making the approximation P*P ≈ I in (42), we obtain
| (43) |
where is diagonal and represents pointwise multiplication by spatially gridded samples of the sum-of-squares polynomial , as defined in (33). Note that after computing the entries of R, computing matrix-vector products with (43) requires only four 2-D FFTs per iteration to evaluate, as opposed to 8R. Working backwards, we can show approximating in this manner is equivalent to minimizing
| (44) |
where here is the function obtained by bandlimiting g to the Fourier extrapolation set Δ, and is the spatial domain L2-norm of vector-valued functions on [0, 1]2. This shows that linear prediction using the entire annihilating subspace is roughly equivalent to (25). The main difference is that the minimal polynomial μ is replaced by the sum-of-squares average polynomial defined in (33). We propose solving (44) as a surrogate for (39) when the dimension of the annihilating subspace is large, and call (44) the least-squares linear prediction (LSLP) approach.
5.2.2 Spatial domain recovery: Weighted total variation
We also consider solving for the discrete samples of a function on a rectangular grid in spatial domain:
| (45) |
This approach of solving for the image on discrete spatial grid is similar to the approach in [47], and can be thought of as a discrete approximation of (25). To obtain a fast algorithm, we use finite differences to approximate the gradient ∇g in (45), and replace the Fourier projection with its DFT counterpart. In this case, (45) can be cast as a weighted total variation minimization which can be solved efficiently with a primal-dual algorithm, such as [69]. We call (45) the weighted total variation approach (WTV).
We note that several edge-aware recovery formulations similar to our WTV (45) and LSLP approach (44) have been proposed previously in the literature; see e.g. [65, 33, 29, 61, 38, 23]. The difference of the proposed approach lies in the estimation of the edge weights, which are obtained from the low-resolution data itself, rather than from a priori known high resolution edge information, as is assumed in the above cited works.
6 Experiments
In this section we demonstrate the utility of our proposed algorithms for super-resolution in magnetic resonance (MR) imaging. A single-coil MR acquisition restricted to a single plane with sampling locations on a uniform Cartesian grid can be accurately modeled as the Fourier coefficients of the underlying 2-D image [21]. This suggests we can apply our proposed two-stage recovery scheme to recover MR data from low-pass Fourier samples at high resolution, provided the underlying image is well-approximated as piecewise constant.
First, to test the validity of the proposed scheme, we experiment on simulated data generated from piecewise constant phantoms. To ensure resolution-independence, we compute ideal Fourier samples from analytical Fourier domain expressions of the MR phantoms, as done in [24]. Taking low-pass samples located within a centered rectangular window, we solve for an annihilating filter of the maximum possible size allowable using the procedure outlined in Section 5. We then recover the image using the proposed algorithms in §5, and compare against a standard total variation (TV) regularized recovery, and a non-convex version of TV (ncvx-TV). For ncvx-TV, we adopt the approach in [10, 9] using a non-convex ℓp, p < 1, penalty in place of the ℓ1 penalty, and fix p = 1/2 in our experiments. For all recovery schemes, we tune regularization parameters to optimize the signal-to-noise ratio (SNR), defined as where x is the reconstructed image, and x0 is the ground truth image.
The results of this first experiment are shown in Fig. 6. Our proposed scheme is able to recover the Shepp-Logan phantom with high accuracy from as few as 65 × 49 low-pass Fourier samples, corresponding to a 20-fold undersampling. A TV-regularized recovery from the same samples shows significant edge blurring, broadening of image features, and ringing-like artifacts in piecewise constant regions. We observe the non-convex TV approach is better able to reduce artifacts in the constant regions of the image, but still distorts the boundaries of the piecewise constant regions. We see similar benefits in the case of a brain phantom having a more complicated edge set geometry. Visually, the WTV reconstruction appears to show some advantages over LSLP in this case, in that it is better able to recovery some of the finer image features and suppress ringing artifacts. However, the LSLP recovery more faithfully recovers the true Fourier coefficients, as measured by the SNR.
Figure 6. Super-resolution of piecewise constant phantoms from ideal Fourier samples.

Recovery of Shepp-Logan phantom from 65 × 49 ideal low-pass Fourier samples, and a brain phantom reconstructed onto 256 × 256 spatial grid reconstructed from 97 × 97 samples. In (a)–(l), spatial domain is shown above, and Fourier domain below (in log scale). Shown in (a)&(g) are the fully sampled images, (b)&(h) is the IFFT of the zero-padded samples, (c)&(i) is a standard TV regularized recovery, (d)&(j) is the non-convex TV used in [10], (e)&(k) is the recovery using the proposed least squares linear prediction (LSLP) method, and (f)&(l) the recovery using the proposed weighted-TV (WTV) formulation. Note the the LSLP more accurately extrapolates the true Fourier coefficients of the image. The sum-of-squares polynomial used as the edge set estimate for the proposed schemes in shown (m) and (n).
We also performed another experiment validating the method on real MR data; see Figure 7. The dataset was obtained from a fully sampled 4-coil acquisition, which we compressed into a single virtual coil using an SVD-based technique [68]. We then retrospectively collected low-pass Fourier samples from the single virtual coil. To simulate a noisy acquisition, we also added i.i.d. complex white Gaussian noise to the low-pass Fourier samples, such that the resulting SNR of the samples was approximately 30 dB.
Figure 7.
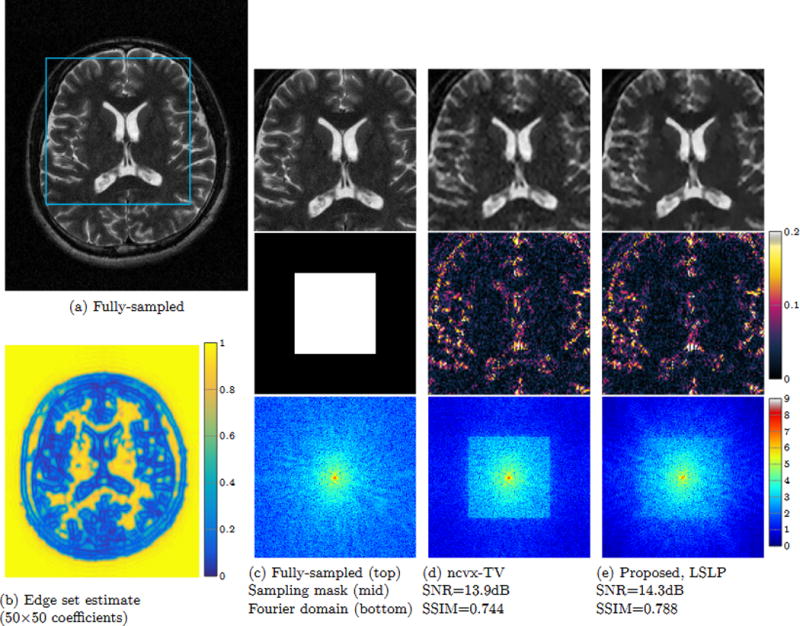
Super-resolution of a single-coil MR brain image from retrospectively undersampled data. Reconstruction from 100 × 100 center Fourier samples taken from a 200 × 200 acquisition reconstructed onto a 200 × 200 spatial grid. The original fully sampled data is shown in (a), and zoomed in (c). A nonconvex TV regularized recovery is shown in (d), and the proposed LSLP recovery is shown in (e) which uses the sum-of-squares polynomial shown in (b) as an edge set estimate. Error images are shown in middle row of (d) and (e), and the Fourier domain recovery in log scale is shown in the bottom row. Note the proposed scheme more faithfully extrapolates the true Fourier data.
We observed that the data from the single virtual coil was complex-valued in image domain with smoothly varying phase over its support, as is typical with MR data. Applying our edge-set estimation procedure directly on the unprocessed low-pass samples gave poor results, since our approach assumes the underlying image is piecewise constant. Therefore, prior to estimating the edge-set, we performed a phase correction step. This was done by taking the inverse DFT of the zero-padded low-pass Fourier samples, canceling out the phase in image domain, and passing back to Fourier domain. We note this pre-processing step only requires access to the low-pass samples. To ensure fair comparisons, when computing image metrics we compared the magnitude images of the reconstructions against the magnitude image obtained from the fully sampled virtual coil.
Additional noise and model-mismatch in real MR data makes estimating the true model order of the edge-set challenging. As a rule of thumb, we chose the annihilating filter dimensions to be half the size of the low-resolution input. We then performed the annihilating subspace denoising step (35) with the rank threshold r set to half the number of the coefficients in the filter. Empirically, we find this procedure is still able to accurately recover the significant edges in the image, as shown in Fig. 7(b). We then pass the “denoised” Fourier samples that result from (35) as the input to the second stage of our recovery scheme.
For the real MR data we find our proposed LSLP approach to be superior to our WTV approach, hence we restrict our comparison to this case. In Fig. 7 we compare the proposed approach with ncvx-TV, which was found to outperform standard TV (not shown). In addition to SNR, we also use the structural similarity index (SSIM) as a measure of the perceptual-quality [64]. We observe that on this dataset our proposed LSLP scheme shows some advantages over ncvx-TV in terms of SNR and SSIM. Visually, the LSLP recovery shows fewer noise artifacts in the constant regions of the image, and better preservation of edge features. Additionally, the Fourier domain images in Fig. 7 indicates the LSLP approach better extrapolates the low-pass Fourier data beyond the sampling region.
Finally, we remark that the computation time of the proposed scheme is primarily dominated by the cost in computing the SVD of the annihilation matrix in the edge-recovery stage. The dimensions of the annihilation matrix grow with the size of the annihilation filter and the number of low-resolution samples. For example, given an 128 × 128 array of low-resolution samples and a filter size of 64 × 64, the annihilation matrix has dimensions 8450 × 4096. The second stage of the recovery using the LSLP and WTV approaches were similar in run time to a standard TV regularized recovery, and a MATLAB implementation running on CPU took under a minute for the datasets considered here.
7 Discussion
In this work, we developed sampling guarantees for the unique recovery of a continuous domain piecewise constant image from few of its low-pass Fourier samples, assuming the edge set of the image is described by the zero set of a trigonometric polynomial. This is achieved by showing the distributional derivatives of such an image satisfy a linear annihilation relation in Fourier domain. One of our main contributions is to prove that, under ideal conditions, unique recovery of the image is possible from the annihilation relation.
We also proposed a two step algorithm for the recovery of images, which extrapolates the known Fourier samples of the image in Fourier domain. We argue such a recovery scheme deserves to be called “off-the-grid”, since we recover the exact Fourier coefficients of the underlying continuous domain image, and at no point do we need to discretize in spatial domain. In the first step of the algorithm, we estimate a collection of annihilating filters from the low-pass samples, which jointly encode the edge set of the image. In the second step, we perform a least squares linear prediction using these filters to extrapolate the signal Fourier domain. We show the proposed scheme has advantages over traditional single-image super-resolution schemes in MRI in its ability to suppress noise artifacts and preserve strong image edges.
While our experiments focused on the problem of super-resolution MRI, we note that this work has potentially wide-ranging applications beyond those presented here. For instance, the first stage our algorithm estimates a continuous domain representation of the edge set of an image, which can be useful for image segmentation. Additionally, the super-resolution problem we considered is not limited to MRI, and will work in any setting where one has a good estimate of the low-pass Fourier samples of image, such as in the image zoom problem studied in [47].
In future work, we plan to resolve the conjectures put forth in §2.4, which would extend our sampling theorems to piecewise constant images with edge set given by an arbitrary trigonometric curve, not just those that are non-intersecting. We also hope to give further insight into the robustness of this scheme with respect to noise and model mismatch, especially with regard to the rank properties of the annihilation matrix.
Finally, we observe that most of the theory presented here extends directly to higher dimensions. For example, in three dimensions we could consider piecewise constant signals whose gradient is supported on a two-dimensional surface given as the zero set of a trigonometric polynomial in three variables. However, the computational burden in this case will be much more significant. For instance, the edge set estimation step would require the singular value decomposition of an extremely large matrix, which we may not even be able to hold in memory. Therefore a goal of future research is to come up with efficient algorithms to further enable the recovery of higher dimensional signals.
Acknowledgments
The authors would like to thank Theirry Blu, Dustin Mixon, and Cynthia Vinzant for fruitful discussions about this project. Parts of this work were presented at the IEEE International Symposium on Biomedical Imaging (ISBI ‘15) held April 16-19, 2015 in Brooklyn, New York, and at the International Conference on Sampling Theory and its Applications (SampTA ‘15) held May 25-29, 2015 in Washington D.C.
A Algebraic Properties of Trigonometric Polynomials and Curves
Here we develop the algebraic properties of trigonometric polynomials and trigonometric curves in some detail. We will slightly expand our definition of a trigonometric polynomial (9) to include those with frequencies k on a shifted lattice for some fixed σ = (σ1, σ2) with . This is to ensure the results below extend to trigonometric polynomials having an even number coefficients in one or both dimensions.
We define the degree of μ, denoted as deg (μ) = (K, L), to be the linear dimensions of the smallest rectangle R whose closure contains the frequency support set, and we say μ is centered if the frequency support rectangle R is symmetric about origin (k, l) = (0, 0). For example,
has frequency support contained in the rectangle [−1, 1] × [−2, 2], hence is centered with degree (2, 4). As another example,
has frequency support contained in [−1, 1] × [0, 1], hence degree (2, 1), but is not centered. However, we can make μ2 centered by multiplying by a phase factor , which shifts the frequency support to . Note μ2 and have the same degree and the same zero set, since these properties are invariant under multiplication by a phase factor.
For any trigonometric polynomial μ with deg(μ) = (K, L) we can associate a unique complex polynomial in by making the substitutions , and multiplying by powers of z and w such that has degree K as a polynomial in z, and degree L as a polynomial in w. Similarly, we may define an inverse mapping acting on polynomials as , where S, T are chosen so that the resulting trigonometric polynomial is centered. For example, using the same μ1 and μ2 as above, we have
and whereas .
We also define E(x, y) = (ej2πx, ej2πy) for all , which is a continuous bijective mapping of [0, 1)2 onto the complex unit torus . Observe that μ(x, y) = 0 if and only if for (z, w) = E(x, y), so that μ = 0 on C if and only if on E(C). This shows we may study the algebraic properties of trigonometric polynomials and their zero sets by studying their corresponding complex polynomials under the mapping . Accordingly, for trigonometric polynomials μ and ν we will say μ divides ν, denoted μ | ν, when divides as polynomials in , or equivalently, if ν = μ γ for some trigonometric polynomial γ; μ and ν are said to have a common factor if there is a γ with positive degree such that γ | μ and γ | ν; and we say μ is irreducible when is irreducible as a polynomial in .
We will need the following well-known result regarding the maximum number of intersections of algebraic curves (see e.g. [50]):
Theorem 5
(Bézout’s Theorem). Let p1 and p2 be non-constant polynomials in with deg(p1) = d1 and deg(p2) = d2. If p1 and p2 have no common factor then the system of equations p1(z, w) = p2(z, w) = 0 has at most d1 d2 solutions.
One important consequence of Bézout’s theorem is that if p(z, w) is irreducible and q(z, w) is any other polynomial such that p(z, w) = q(z, w) = 0 has infinitely many solutions, then p must divide q.
We can readily translate these results to trigonometric polynomials μ and ν by mapping to the polynomials and , and mapping back again. If deg(μ) = (K, L), then has total degree at most K + L as a polynomial in , and so we have the following corollary that we will also call “Bézout’s theorem”:
Corollary 1
Let μ1 and μ2 be trigonometric polynomials with deg(μ1) = (K1, L1) and deg(μ2) = (K2, L2). If μ1 and μ2 have no common factor then the system of equations μ1(x, y) = μ2(x, y) = 0 has at most (K1 + L1)(K2 + L2) solutions in [0, 1)2.
Consequently, if the zero sets of trigonometric polynomials μ and ν have infinite intersection, and μ is irreducible, this implies μ | ν.
A.1 Existence of a minimal polynomial (Proof of Proposition 2)
Here we prove a slightly stronger version of Proposition 2, which shows the minimal polynomial satisfies an additional unique divisibility property. Recall that we say the zero set of a trigonometric polynomial C = {μ = 0} is a trigonometric curve if C infinite and has no isolated points, i.e. if every connected component of C is one-dimensional.
Proposition 9
For every trigonometric curve C there is unique (up to scaling) real-valued trigonometric polynomial μ0 such that C = {μ0 = 0} and for any other trigonometric polynomial μ with μ = 0 on C we have deg(μ0) ≤ deg(μ) componentwise, and μ0 | μ.
Proof
Let μ be any trigonometric polynomial with C = {μ = 0}. Set . Then p has a unique factorization (up to scaling) into irreducible factors: . Create a polynomial , k ≤ r, omitting any factors pi whose zero sets do not intersect , or intersect at only finitely many points. Define , which by construction satisfies μ0 = 0 on C/A where A is possibly some finite set. In fact, it must be the case that μ0 = 0 on all of C, since μ0 is continuous and C contains no isolated points by assumption. We will show μ0 is the desired minimal polynomial.
Note the algebraic curve X = {p0 = 0} is the union of irreducible curves . Define , then likewise we have a decomposition of C as the union of the curves Cj. If ν is any other trigonometric polynomial with C = {ν = 0}, then ν = 0 on each Cj, and for q = P [ν] we have q = 0 on each infinite set . Therefore by Bézout’s theorem, must factor as r for some , hence deg(p0) ≤ deg(q) and p0 | q, which implies deg(μ0) ≤ deg(ν) and μ0 | ν.
We now show μ0 is real-valued under an appropriate choice of scaling. Without loss of generality assume Re[μ0]≠0. Since and μ0 is centered, we have deg(Re[μ0]) ≤ deg(μ0). Also, since {μ0 = 0} ⊆ {Re[μ0] = 0} we have μ0|Re[μ0] and so Re[μ0] = c·μ0 for some by the uniqueness of μ0. Therefore is real-valued.
Finally, to show uniqueness suppose ν0 is another centered trigonometric polynomial satisfying C = {ν0 = 0} and deg(ν0) = deg(μ0). Then μ0 | ν0, and so by degree constraints, ν0 = c·μ0 for some . □
A.2 Additional properties of minimal polynomials
Our uniqueness theorems also make use of the following result, which shows the zero set of the minimal polynomial and the zero set of its gradient have at most a finite intersection:
Proposition 10
Let C be a trigonometric curve with minimal polynomial μ. Then ∇μ = 0 for at most finitely many points on C.
Proof
Note the partial derivatives ∂xμ and ∂yμ are trigonometric polynomials with deg(∂xμ) ≤ deg(μ) and deg(∂yμ) ≤ deg(μ). First consider the case where μ is irreducible. If {∇μ = 0} and C have an infinite intersection, then by Bézout’s theorem, μ must divide ∂xμ and ∂yμ, and so by degree considerations, ∂xμ = Aμ and ∂yμ = Bμ for some non-zero constants A, B. By comparing coefficients, we see this is only possible if μ is the zero polynomial.
The general case follows by induction on the number of irreducible factors in μ: Suppose μ = μ1 ·⋯ μn−1μn where each μi is a distinct irreducible factor (that μ must have this form follows from the proof of Prop. 2). Let ν = μ1·⋯ μn−1, then we may write C = C1 ∪ C2 where C1 = {ν = 0} and C2 = {μn = 0}. By the product rule ∇μ = μn∇v+v∇μn. Therefore, ∇μ = 0 on C1 if only if μn = 0 or ∇ν = 0 on C1. However, {μn = 0} ∩ C1 is finite by Bézout’s theorem, and {∇ν = 0} ∩ C1 is finite by inductive hypothesis, hence {∇μ = 0} ∩ C1 is finite. A similar argument shows {∇μ = 0} ∩ C2 is finite, which proves induction. □
The following proposition shows that minimal polynomials must always change sign across an infinite segment of its zero set.
Proposition 11
Let C be a trigonometric curve with minimal polynomial μ. If U1 and U2 are distinct connected components of [0, 1]2/C whose boundaries share an infinite segment of C, then the sign of μ must be different on U1 and U2.
Proof
Let U1 and U2 be any two connected components of [0, 1]2/C whose boundaries share an infinite segment S ⊆ C, and suppose, without loss of generality, μ is positive on both U1 and U2. Then for all points in S, μ has a local minimum, and since μ is smooth this implies ∇μ = 0 on all of S, which violates Proposition 10. Therefore μ must have different signs on U1 and U2.
Note that this result puts certain topological constraints on the geometry of trigonometric curves. For instance, if C is any trigonometric curve, and r0 ∈ C, then in any sufficiently small neighborhood of r0, the set C/{r0} must consist of an even number of branches, since otherwise the minimal polynomial would violate the parity rule in Prop. 11. This implies, for example, that within the region [0, 1]2 trigonometric curves must always be closed. It also rules out such features such as triple junctions, where locally three curve segments terminate at a common intersection point.
A.3 Bound on Connected Components (Proof of Proposition 3)
To bound the number of connected components in the complement of a trigonometric curve, we make use of Bernstein’s theorem, also known as the BKK bound, which is a well-known refinement of Bézout’s theorem (see, e.g., [58, 22]). Bernstein’s theorem relates the maximum number of isolated zeros of a Laurent polynomial system to the geometry of the coefficient supports. Here we use the notation conv(Λ) to denote the convex hull of an index set treated as a subset of ℝ2. For any two sets P1, P2 ⊂ ℝ2 we also use to denote their mixed area:
where area(·) is the usual Euclidean area and P1 + P2 is the Minkowski sum, {p1 + p2 : p1 ∈ P1, p2 ∈ P2}.
Theorem 6 (Bernstein’s Theorem)
Let p1(z, w) and p2(z, w) be Laurent polynomials with coefficient supports Λ1 and Λ2, and let P1 = conv(Λ1) and P2 = conv(Λ1). The number of isolated solutions of system p1(z, w) = p2(z, w) = 0 in is at most .
Since a trigonometric polynomial is simply the restriction of a Laurent polynomial to the unit complex torus, we can use this result to bound the number of isolated zeros of a system of trigonometric polynomials. In particular, using that fact that the mixed area satisfies if Pi ⊆ Ri, i = 1, 2 ([22], pg. 117), we have the following direct corollary:
Corollary 2
Let μ1 and μ2 be trigonometric polynomials with deg(μ1) ≤ (K1, L1) and deg(μ2) ≤ (K2, L2). The number of isolated solutions of μ1(x, y) = μ2(x, y) = 0 in [0, 1)2 is at most K1L2 + K2L1.
Now we prove Proposition 3:
Let C be a trigonometric curve of degree (K, L), i.e. the minimal polynomial μ for C has degree (K, L), and let U1, …, Un be the connected components of [0, 1]2/C. For each i = 1, …, n, μ is continuous with μ ≠ 0 on Ui, μ = 0 on ∂U, and is compact, therefore μ must attain its maximum or minimum at some point ri in the interior U, where ∇μ(ri) = 0. Hence, the number of components n is bounded by the cardinality of {∇μ = 0} = {∂xμ = 0} ∩ {∂yμ = 0}. When {∇μ = 0} is finite, the result n ≤ 2KL follows from Corollary 2 since deg(∂xμ), deg(∂yμ) ≤ (K, L).
If {∇μ = 0} is not finite, i.e. {∂xμ = 0} and {∂yμ = 0} share a common component, we may obtain the same bound by a standard perturbation argument, which we summarize here (see, e.g., the appendix [53] for further details). Let v ∈ ℝ2 be a sufficiently small vector. By continuity, the function also attains a maximum or minimum in each Ui, and vanishes at these points, which shows n is also bounded by the cardinality of {∇μ = v}. Finally, note that since ∇μ is a smooth map whose domain and range have the same dimension, for a generic vector v the set {∇μ = v} is finite by the regular level set theorem (Cor. 8.10, [36]), and the result again follows by Corollary 2. □
We note that the bound in Proposition 3 appears to be an overestimate. Empirically, we find that the maximum number of connected components of the complement to a trigonometric curve of degree (K, L) never exceeds KL (in the topology of the torus ). Moreover, this bound is only obtained in artificial cases, such as when the minimal polynomial is μ(x, y) = sin(πKx) sin(πLy), whose zero set is the union of K vertical lines and L horizontal lines.
B Proofs of Theorems
B.1 Proof of Theorem 1
Suppose f = 1U, with U simply connected and ∂U = {μ = 0}. where μ is the minimal polynomial having coefficients (c[k] : k ∈ Λ). Let (d[k] : k ∈ Λ) be any non-trivial set of coefficients satisfying
| (46) |
We will show the coefficients d[k] must be a scalar multiple of c[k].
Let η denote the trigonometric polynomial having coefficients (d[k] : k ∈ Λ). Observe that the sums in (46) represent the Fourier coefficients of η∇f evaluated at ℓ ∈ 2Λ. Therefore, (46) can be expressed in spatial domain as
where is Fourier projection onto the index set 2Λ. If we let φ be any smooth test field, then by duality
or, equivalently,
where denotes the space all smooth vector fields φ = (φ1, φ2) whose components φ1, φ2 are bandlimited to 2Λ. Since f = 1U, using the distributional characterization of ∇f in (14) we have
| (47) |
Because ∂U is a level set of μ, the outward normal n is given pointwise by n(r) = ±∇μ(r) / |∇μ(r)| for all r ∈ ∂U, provided ∇μ(r) ≠ 0. However, by Prop. 10, the set of points for which ∇μ = 0 on ∂U is at most finite, hence of measure zero, so the formula n(r) = ±∇μ(r)/|∇μ(r)| holds almost everywhere on ∂U. Now, without loss of generality, assume μ < 0 on U. Since μ is a minimal polynomial, by Prop. 11 it must change sign across the any infinite segment of ∂U, hence μ > 0 on UC, so that n(r) = ∇μ(r)/|∇μ(r)| for all r ∈ ∂U. Setting , from (47) we have
which is possible if and only if η = 0 on ∂U since |∇μ(r)| = 0 for at most finitely many r ∈ ∂U. Therefore η must be a scalar multiple of μ by the uniqueness of minimal polynomials.
B.2 Proof of Theorems 2 and 3
Assume (d[k] : k ∈ Λ) is another solution of the system, and let η denote the associated trigonometric polynomial. Following the same steps as in the proof of Theorem 1, we may show
Since , from (14) this gives
| (48) |
Recall we assume ∂Ui = {μi = 0} for all i = 1, …, n, with μi minimal, and μ = μ1 ⋯ μn. Note that ∪i∂Ui = {μ = 0}, and since we assumed the boundaries to be pairwise disjoint, μ is·also the minimal polynomial. Define . Then by the product rule
| (49) |
Define the vector field
| (50) |
Note the components of ψj are trigonometric polynomials in B2Λ, hence for all j = 1, …, n. Since on ∂Ui for all i ≠ j, substituting ψj into (48) gives
where in the last step we used that on ∂Uj by (49). Since we also assume each Ui is connected, the curves ∂Ui do not intersect, we know μ has fixed sign on Ui. Therefore the outward normal on each ∂Uj is given by n = ±∇μ/|∇μ|, where the choice of sign is fixed for each i. Hence we have
which implies η vanishes on each ∂Uj. Since μ is the minimal polynomial, this is only possible if η is a scalar multiple of μ, which proves the claim in Theorem 2.
The proof of Theorem 3 is identical to the above, except we exchange the index set 2Λ with Λ + Λ′. This allows us to make the same choice of ψj as in (50), which again implies η vanishes on each ∂Uj. Hence by Prop. 2 we have η = μγ, where γ ∈ BΛ′:Λ.
B.3 Proof of Proposition 5
Suppose g ∈ L1([0, 1]2) satisfies μ∇g = 0 and let U be any connected component of {μ = 0}C. Let φ be any arbitrary smooth test field with support K strictly contained within U. Since μ = 0 only on ∂U, and μ is smooth, the field ψ = φ/μ is smooth, and we have
which shows the distribution ∇g restricted to U is identically zero. We now show this implies g restricted to U is a constant function almost everywhere.
Let φε be any smooth approximation of the identity, i.e. for all ε > 0 define ϕε(r) := ε2ϕ(εr) where ϕ is any smooth function satisfying ϕ ≥ 0, ∫ϕ(r)dr = 1, supp(ϕ) ⊆ {|r| ≤ 1}. Let U′ be any closed connected set inside U. Then there exists an ε′ > 0 such that . Fix ε < ε′. Since ∇g ∗ ϕε is a smooth function, ∇g|U = 0, and supp(ϕε) ⊆ U we have
which implies g ∗ ϕε is constant on U′. By properties of approximations of identity, g ∗ ϕε → g pointwise almost everywhere as ε → 0, which shows g is the limit of constant functions on U′, and therefore itself constant on U′. Since U′ ⊆ U was arbitrary, we may conclude g restricted to U is a constant function almost everywhere, proving the claim.
B.4 Proof of Theorem 4
Suppose g is another solution, and set h = g − f. We have
| (51) |
The proof amounts to showing that the only feasible solution to (51) is h = 0. By the first constraint and Prop. 5, we see that h is almost everywhere a piecewise constant function:
| (52) |
where the constants bi are unknown, and Ui are the connected components of {μ = 0}C. From , k ∈ Γ, we also have , k ∈ Γ, and so
By linearity, this implies
for all vector fields . The proof now follows from the same argument in the proof to Theorem 2 (with η = 1): Using the same notation as in (49), we may choose , which implies
and so bi = 0 for all i = 1, …, N, and hence h = 0 proving the claim.
B.5 Proof of Proposition 6
Let μ be the minimal polynomial with coefficients c = (c[k] : k ∈ Λ), and for every ℓ ∈ Λ′: Λ define the filter cℓ supported in Λ′ by
that is, cℓ is a shift of the minimal polynomial coefficients within the larger index set Λ. By the Fourier shift theorem, cℓ are the Fourier coefficients of ej2πℓ·rμ(r). Therefore, cℓ is also an annihilating filter since the zero sets of μ(r) and ej2πℓ·rμ(r) coincide. This implies for all ℓ ∈ Λ′: Λ. Also, note that the vectors cℓ are linearly independent because the location of their non-zero entries are distinct. Hence the nullspace of has dimension at least |Λ′ : Λ|, which gives the desired rank bound.
Finally, supposing f satisfies the conditions of Theorem 2, and Γ ⊇ 2Λ′ + Λ so that Γ : Λ′ ⊇ Λ′ + Λ. Theorem 3 shows that if d is any null space vector, then d are the Fourier coefficients of μ γ, for some trigonometric polynomial γ having coefficients in Λ′ : Λ, which shows that d belongs to the span of the cℓ, proving the claim.
B.6 Proof of Proposition 7
Let r ∈ {μ = 0}C. Then if and only if γi(r) = 0 for all i = 1, …, R, where R = |Λ′ : Λ|. We will show the set is at most finite. Note that if P is infinite, by Bézout’s theorem, each γi must have a common non-constant factor ϕ, and so γi = ρi ϕ, where each ρi is a trigonometric polynomial with degree strictly smaller than γi. This means each has coefficients supported within some index set Λ1 ⊆ Λ′ : Λ with Λ ≠ Λ′ : Λ. Since the coefficient vectors di are orthonormal, so are the μi as functions in L2([0, 1]2):
where δi,j = 0 if i ≠ j and δi,j = 1 if i = j. However, the above weighted integral also defines an inner product in which the are mutually orthogonal, and hence linearly independent. But this is impossible, since the ρi are contained in a space of dimension less than R. Therefore the γi have no common factors, which by Bèzout’s theorem implies the intersection of their zero sets is at most finite.
B.7 Proof of Proposition 8
Proof
Note that er = PΛℱ{δr}, where δr is a Dirac delta centered at r ∈ [0 1]2, and ℱ is the (distributional) Fourier transform, PΛ is projection onto the index set Λ. Since each column di in D, is a filter supported in Λ, we trivially have PΛ(di) = di. Therefore, by Parseval’s theorem,
□
Footnotes
This work is supported by grants NSF CCF-0844812, NSF CCF-1116067, NIH 1R21HL109710-01A1, ACS RSG-11-267-01-CCE, ONR-N000141310202, NIH 1R01EB019961-01A1.
References
- 1.Baraniuk RG. Compressive sensing. Signal Processing Magazine, IEEE. 2007 Jul;24(4):118–121. [Google Scholar]
- 2.Blu T, Dragotti PL, Vetterli M, Marziliano P, Coulot L. Sparse sampling of signal innovations. Signal Processing Magazine, IEEE. 2008;25(2):31–40. [Google Scholar]
- 3.Burger M. A level set method for inverse problems. Inverse problems. 2001;17(5):1327. [Google Scholar]
- 4.Burger M, Osher SJ. A survey on level set methods for inverse problems and optimal design. European Journal of Applied Mathematics. 2005;16(02):263–301. [Google Scholar]
- 5.Cadzow JA. Signal enhancement-a composite property mapping algorithm. Acoustics, Speech and Signal Processing, IEEE Transactions on. 1988;36(1):49–62. [Google Scholar]
- 6.Candès EJ, Fernandez-Granda C. Super-resolution from noisy data. Journal of Fourier Analysis and Applications. 2013;19(6):1229–1254. [Google Scholar]
- 7.Candès EJ, Fernandez-Granda C. Towards a mathematical theory of super-resolution. Communications on Pure and Applied Mathematics. 2014;67(6):906–956. [Google Scholar]
- 8.Chan T, Vese L. A level set algorithm for minimizing the Mumford-Shah functional in image processing. In. Variational and Level Set Methods in Computer Vision, 2001 Proceedings IEEE Workshop on. 2001:161–168. [Google Scholar]
- 9.Chartrand R. International Symposium on Biomedical Imaging: ISBI 2009. IEEE; 2009. Fast algorithms for nonconvex compressive sensing: MRI reconstruction from very few data. In; pp. 262–265. [Google Scholar]
- 10.Chartrand R, Sidky EY, Pan X. International Symposium on Biomedical Imaging: ISBI 2011. IEEE; 2011. Frequency extrapolation by nonconvex compressive sensing. In; pp. 1056–1060. [Google Scholar]
- 11.Chen C, Marziliano P, Kot AC. 2D finite rate of innovation reconstruction method for step edge and polygon signals in the presence of noise. Signal Processing, IEEE Transactions on. 2012;60(6):2851–2859. [Google Scholar]
- 12.Chen Y, Chi Y. Robust spectral compressed sensing via structured matrix completion. Information Theory, IEEE Transactions on. 2014;60(10):6576–6601. [Google Scholar]
- 13.Cheng Q, Hua Y. A review of parametric high-resolution methods. In: Hua Y, Gershman A, Cheng Q, editors. High-resolution and robust signal processing. CRC Press; 2003. [Google Scholar]
- 14.Condat L, Hirabayashi A. Cadzow denoising upgraded: A new projection method for the recovery of dirac pulses from noisy linear measurements. Sampling Theory in Signal and Image Processing. 2015;14(1):p–17. [Google Scholar]
- 15.Do MN, Vetterli M. The contourlet transform: an efficient directional multiresolution image representation. Image Processing, IEEE Transactions on. 2005;14(12):2091–2106. doi: 10.1109/tip.2005.859376. [DOI] [PubMed] [Google Scholar]
- 16.Donoho DL. Compressed sensing. Information Theory, IEEE Transactions on. 2006;52(4):1289–1306. [Google Scholar]
- 17.Dorn O, Lesselier D. Level set methods for inverse scattering. Inverse Problems. 2006;22(4):R67. [Google Scholar]
- 18.Dragotti PL, Vetterli M, Blu T. Sampling moments and reconstructing signals of finite rate of innovation: Shannon meets strang–fix. Signal Processing, IEEE Transactions on. 2007;55(5):1741–1757. [Google Scholar]
- 19.Edwards RE. Fourier series: a modern introduction. Vol. 2. Springer Science & Business Media; 2012. [Google Scholar]
- 20.Eslami R, Jacob M. Robust reconstruction of MRSI data using a sparse spectral model and high resolution MRI priors. Medical Imaging, IEEE Transactions on. 2010;29(6):1297–1309. doi: 10.1109/TMI.2010.2046673. [DOI] [PubMed] [Google Scholar]
- 21.Fessler JA. Model-based image reconstruction for MRI. Signal Processing Magazine, IEEE. 2010;27(4):81–89. doi: 10.1109/MSP.2010.936726. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 22.Fulton W. Introduction to toric varieties. 131. Princeton University Press; 1993. [Google Scholar]
- 23.Gong E, Huang F, Ying K, Wu W, Wang S, Yuan C. PROMISE: Parallel-imaging and compressed-sensing reconstruction of multicontrast imaging using sharable information. Magnetic Resonance in Medicine. 2015;73(2):523–535. doi: 10.1002/mrm.25142. [DOI] [PubMed] [Google Scholar]
- 24.Guerquin-Kern M, Lejeune L, Pruessmann KP, Unser M. Realistic analytical phantoms for parallel magnetic resonance imaging. Medical Imaging, IEEE Transactions on. 2012;31(3):626–636. doi: 10.1109/TMI.2011.2174158. [DOI] [PubMed] [Google Scholar]
- 25.Haacke E, Liang ZP, Izen S. Superresolution reconstruction through object modeling and parameter estimation. Acoustics, Speech and Signal Processing, IEEE Transactions on. 1989 Apr;37(4):592–595. [Google Scholar]
- 26.Haacke EM, Liang ZP, Boada FE. Image reconstruction using POCS, model constraints, and linear prediction theory for the removal of phase, motion, and gibbs artifacts in magnetic resonance and ultrasound imaging. Optical Engineering. 1990;29(5):555–566. [Google Scholar]
- 27.Haacke EM, Liang ZP, Izen SH. Constrained reconstruction: A superresolution, optimal signal-to-noise alternative to the fourier transform in magnetic resonance imaging. Medical Physics. 1989;16(3):388–397. doi: 10.1118/1.596427. [DOI] [PubMed] [Google Scholar]
- 28.Haldar JP. Low-rank modeling of local k-space neighborhoods (LORAKS) for constrained MRI. Transactions on Medical Imaging. 2014;33(3):668–681. doi: 10.1109/TMI.2013.2293974. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 29.Haldar JP, Hernando D, Song SK, Liang ZP. Anatomically constrained reconstruction from noisy data. Magnetic Resonance in Medicine. 2008;59(4):810–818. doi: 10.1002/mrm.21536. [DOI] [PubMed] [Google Scholar]
- 30.Hu X, Levin DN, Lauterbur PC, Spraggins T. SLIM: Spectral localization by imaging. Magnetic Resonance in Medicine. 1988;8(3):314–322. doi: 10.1002/mrm.1910080308. [DOI] [PubMed] [Google Scholar]
- 31.Hua Y. Estimating two-dimensional frequencies by matrix enhancement and matrix pencil. Signal Processing, IEEE Transactions on. 1992;40(9):2267–2280. [Google Scholar]
- 32.Jacob M, Bresler Y, Toronov V, Zhang X, Webb A. Level set algorithm for the reconstruction of functional activation in near-infrared spectroscopic imaging. Journal of Biomedical Optics. 2006 Jan; doi: 10.1117/1.2400595. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 33.Jacob M, Zhu X, Ebel A, Schuff N, Liang ZP. Improved model-based magnetic resonance spectroscopic imaging. Medical Imaging, IEEE Transactions on. 2007;26(10):1305–1318. doi: 10.1109/TMI.2007.898583. [DOI] [PubMed] [Google Scholar]
- 34.Jin KH, Lee D, Ye JC. A general framework for compressed sensing and parallel MRI using annihilating filter based low-rank Hankel matrix. arXiv preprint arXiv:1504.00532. 2015 [Google Scholar]
- 35.Khalidov I, Van De Ville D, Jacob M, Lazeyras F, Unser M. BSLIM: Spectral localization by imaging with explicit field inhomogeneity compensation. Medical Imaging, IEEE Transactions on. 2007;26(7):990–1000. doi: 10.1109/TMI.2007.897385. [DOI] [PubMed] [Google Scholar]
- 36.Lee JM. Smooth manifolds. Springer; 2003. [Google Scholar]
- 37.Liang ZP, Haacke E, Thomas C. High-resolution inversion of finite Fourier transform data through a localised polynomial approximation. Inverse Problems. 1989;5(5):831. [Google Scholar]
- 38.Luo J, Zhu Y, Li W, Croisille P, Magnin IE. MRI reconstruction from 2D truncated k-space. Journal of Magnetic Resonance Imaging. 2012;35(5):1196–1206. doi: 10.1002/jmri.23538. [DOI] [PubMed] [Google Scholar]
- 39.Mallat SG. A theory for multiresolution signal decomposition: the wavelet representation. Pattern Analysis and Machine Intelligence, IEEE Transactions on. 1989;11(7):674–693. [Google Scholar]
- 40.Maravic I, Vetterli M. Sampling and reconstruction of signals with finite rate of innovation in the presence of noise. Signal Processing, IEEE Transactions on. 2005;53(8):2788–2805. [Google Scholar]
- 41.Milanfar P, Verghese GC, Karl WC, Willsky AS. Reconstructing polygons from moments with connections to array processing. Signal Processing, IEEE Transactions on. 1995;43(2):432–443. [Google Scholar]
- 42.Mumford D, Shah J. Boundary detection by minimizing functionals. Image understanding. 1988:19–43. [Google Scholar]
- 43.Mumford D, Shah J. Optimal approximations by piecewise smooth functions and associated variational problems. Communications on pure and applied mathematics. 1989;42(5):577–685. [Google Scholar]
- 44.Ongie G, Jacob M. Recovery of piecewise smooth images from few fourier samples. Sampling Theory and Applications (SampTA) 2015 [Google Scholar]
- 45.Ongie G, Jacob M. Super-resolution MRI using finite rate of innovation. IEEE International Symposium on Biomedical Imaging: ISBI 2015. 2015 [Google Scholar]
- 46.Pal P, Vaidyanathan P. A grid-less approach to underdetermined direction of arrival estimation via low rank matrix denoising. Signal Processing Letters, IEEE. 2014;21(6):737–741. [Google Scholar]
- 47.Pan H, Blu T, Dragotti PL. Sampling curves with finite rate of innovation. Signal Processing, IEEE Transactions on. 2014;62(2) [Google Scholar]
- 48.Schmidt RO. Multiple emitter location and signal parameter estimation. Antennas and Propagation, IEEE Transactions on. 1986;34(3):276–280. [Google Scholar]
- 49.Schweiger M, Dorn O, Zacharopoulos A, Nissila I, Arridge S. 3D level set reconstruction of model and experimental data in diffuse optical tomography. Optics express. 2010;18(1):150–164. doi: 10.1364/OE.18.000150. [DOI] [PubMed] [Google Scholar]
- 50.Shafarevich IR. Varieties in projective space. Springer-Verlag; Berlin: 1994. Basic algebraic geometry. 1. [Google Scholar]
- 51.Shin PJ, Larson PE, Ohliger MA, Elad M, Pauly JM, Vigneron DB, Lustig M. Calibrationless parallel imaging reconstruction based on structured low-rank matrix completion. Magnetic Resonance in Medicine. 2013 doi: 10.1002/mrm.24997. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 52.Shukla P, Dragotti PL. Sampling schemes for multidimensional signals with finite rate of innovation. Signal Processing, IEEE Transactions on. 2007;55(7):3670–3686. [Google Scholar]
- 53.Solymosi J, Tao T. An incidence theorem in higher dimensions. Discrete & Computational Geometry. 2012;48(2):255–280. [Google Scholar]
- 54.Starck JL, Candès EJ, Donoho DL. The curvelet transform for image denoising. Image Processing, IEEE Transactions on. 2002;11(6):670–684. doi: 10.1109/TIP.2002.1014998. [DOI] [PubMed] [Google Scholar]
- 55.Stoica P, Moses RL. Introduction to spectral analysis. Vol. 1. Prentice hall Upper Saddle River; NJ: 1997. [Google Scholar]
- 56.Storath M, Weinmann A, Demaret L. Jump-sparse and sparse recovery using potts functionals. 2014 [Google Scholar]
- 57.Strichartz RS. A guide to distribution theory and Fourier transforms. World Scientific; 2003. [Google Scholar]
- 58.Sturmfels B. Polynomial equations and convex polytopes. The American Mathematical Monthly. 1998;105(10):907–922. [Google Scholar]
- 59.Tang G, Bhaskar BN, Recht B. Information Sciences and Systems (CISS), 2013 47th Annual Conference on. IEEE; 2013. Near minimax line spectral estimation; pp. 1–6. [Google Scholar]
- 60.Tsai A, Yezzi A, Jr, Willsky AS. Curve evolution implementation of the Mumford-Shah functional for image segmentation, denoising, interpolation, and magnification. Image Processing, IEEE Transactions on. 2001;10(8):1169–1186. doi: 10.1109/83.935033. [DOI] [PubMed] [Google Scholar]
- 61.Vaswani N, Lu W. Modified-CS: Modifying compressive sensing for problems with partially known support. Signal Processing, IEEE Transactions on. 2010;58(9):4595–4607. [Google Scholar]
- 62.Vese LA, Chan TF. A multiphase level set framework for image segmentation using the Mumford and Shah model. International journal of computer vision. 2002;50(3):271–293. [Google Scholar]
- 63.Vetterli M, Marziliano P, Blu T. Sampling signals with finite rate of innovation. Signal Processing, IEEE Transactions on. 2002;50(6):1417–1428. [Google Scholar]
- 64.Wang Z, Bovik AC, Sheikh HR, Simoncelli EP. Image quality assessment: from error visibility to structural similarity. Image Processing, IEEE Transactions on. 2004;13(4):600–612. doi: 10.1109/tip.2003.819861. [DOI] [PubMed] [Google Scholar]
- 65.Xiang QS. Accelerating MRI by skipped phase encoding and edge deghosting (SPEED) Magnetic Resonance in Medicine. 2005;53(5):1112–1117. doi: 10.1002/mrm.20453. [DOI] [PubMed] [Google Scholar]
- 66.Xu W, Cai JF, Mishra KV, Cho M, Kruger A. Precise semidefinite programming formulation of atomic norm minimization for recovering d-dimensional (d ≥ 2) off-the-grid frequencies. Information Theory and Applications Workshop (ITA), 2014 IEEE. 2014 [Google Scholar]
- 67.Ye JC, Bresler Y, Moulin P. A self-referencing level-set method for image reconstruction from sparse Fourier samples. International Journal of Computer Vision. 2002;50(3):253–270. [Google Scholar]
- 68.Zhang T, Pauly JM, Vasanawala SS, Lustig M. Coil compression for accelerated imaging with Cartesian sampling. Magnetic Resonance in Medicine. 2013;69(2):571–582. doi: 10.1002/mrm.24267. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 69.Zhu M, Chan T. An efficient primal-dual hybrid gradient algorithm for total variation image restoration. UCLA CAM Report. 2008:08–34. [Google Scholar]