

Abstract
Background:
To compare the superiority of teaching methods for acquiring a proficient level of surgical skill in a robotic surgery-naïve individual using a robotic virtual reality simulator.
Methods:
This study employed a prospective, randomized study design to assess student's learning curve. We divided 45 subjects into 3 groups: those with expert proctoring (group I), those who watched only an educational video (group II), and those with independent training (group III; n = 15 per group). The task used in this study was the Tube 2 and it imitates a vesicourethral anastomosis in robotic prostatectomy. The effects were analyzed by the time to end the task after overcoming the learning curve which is determined by several performance parameters.
Results:
The number of task repetitions required to reach the learning curve plateau was 45, 42, and 37 repetitions in groups I, II, and III, which means that there was continuous improvement in performing the task after 40 repetitions only in groups I and II. The mean time for completing the task during the stabilization period was significantly different between group I and group III and group II and group III, which means that the independent training method was inferior to the other methods (group I vs. group II vs. group III: 187.38 vs. 187.07 vs. 253.47 seconds, P < .001).
Conclusions:
This study's findings showed that an educational video can be as beneficial as expert proctoring, which implies that the development of a standardized educational video would be worthwhile.
Keywords: curriculum, interactive learning, simulation training, surgical anastomosis
1. Introduction
New medical technologies such as robotic systems have been developed and applied in the medical area. Therefore, as evidence for the clinical advantages of robotic surgery continues to be collected, the demand for training will continue to increase.
A robotic virtual reality simulator (RVRS; dV-TrainerTM, Mimic Technologies) has been proven to be a valuable training and evaluation tool for the da Vinci Surgical System (Intuitive Surgical, Inc.) in a previous report.[1] According to using simulator, surgeons can advance their skills and overcome their basic learning curve.[2]
The best method to optimize motor learning has not yet been determined in RVRS training.[3] Previously, we reported that the training schedule can affect the trainee's score and reduce the number of repetitions with reduced fatigue.[4] We assumed that other factors would aid in acquiring proficiency effectively, and these factors need to be identified. Proctoring means to keep watch over trainee at operation and it would be an effective teaching method for developing surgical skill.[5,6] Of course, this method is what is applied in operating room. However, in the medical field, there are limited proctorship opportunities due to time and space constraints.
It is noteworthy that a well-made educational video is known to have beneficial educational effects.[5] Many surgeons preparing for robotic surgery receive some help from an educational video. We hypothesized that a well-performed educational video would help the trainees, especially with a relatively complex simulator module. The aim of study is to determine which educational method is more effective to gain proficiency with the RVRS based on a learning curve.
2. Methods
2.1. Subjects
Forty five medical students participated in this prospective, randomized study. None of the students had any experiences with robotic surgery. We randomly divided the subjects into 3 groups as follows: group I (n = 15), those taught by expert who demonstrated the task and provided specific feedback for improvement; group II (n = 15), those who viewed the expert's educational video were allowed to see the video adequately before running simulator; moreover, even after starting simulation training, they were allowed to view the video whenever they wanted; and group III (n = 15), those with independent training without proctoring or an educational video. The 2 surgeons that acted as proctors are renowned experts in robotic prostatectomy who had overcome the robot assisted radical prostatectomy (RARP) learning curve.
2.2. Task
Vesicourethral anastomosis (VUA) is one of the important and specified procedures in robotic radical prostatectomy. In previous reports, the Tube 2 has been introduced as a complex procedure of the RVRS that imitates VUA.[7,8] Moreover, it was validated in our previous study for accomplishing a predetermined proficiency level. All students listened to a mini lecture and watched a video clip, and then viewed a demonstration presented by the same proctor. Warm-up exercises consisted of “pick and place’” and “peg board” maneuvers to familiarize participants with the robotic system, and included EndoWrist manipulation, clutch pedaling, and camera handling.[4] It was designed to simulate performing a running anastomosis technique, and it requires the user to drive a needle through a designated area near the edge of 2 adjacent tubes. According to our previous study, most subjects are able to achieve proficiency for the task after 74 trials, which take approximately about 4 hours.[4] This program was repeated more than 80 times to obtain a sufficient learning curve for 60 minutes every day, which was based on a previous study about effective training.[4]
2.3. Comparing the superiority of each teaching method
Student's performance was recorded and analyzed using a computerized built-in scoring algorithm. Previously, these domains have been validated in other studies.[9,10] The measured variables for determining ‘acquisition of learning curve’ included the total task time, economy of motion, master workspace range, and number of instrument collisions and critical errors. After acquisition of the proficiency level, the time to end the task was analyzed.
2.4. Statistical analysis
We used the Kruskal–Wallis and Mann–Whitney test to compare the mean learning curves among the 3 groups. The learning curve was depicted and the stable point was identified through the cumulative sum (CUSUM) control chart. The CUSUM charting is useful for assessing subjects’ performance after short-phase training using a RVRS. In general, the CUSUM chart is not largely affected by the sample size.[11] Continuous variables are expressed as a mean ± standard deviation. All the analyses were performed using SPSS software (version 20.0; SPSS Inc., Chicago, IL) and Minitab software (version 15; Minitab, Inc., State College, PA). P values < .05 were considered statistically significant.
3. Results
The demographic characteristics and data of performance using a RVRS among the groups are shown in Table 1. There was no significant difference in gender rate and age among the groups. Figure 1 presents a line plot of the total task time in the 3 groups and the number of attempts made to perform the task.
Table 1.
Comparison of the performance among groups during the simulator sessions (group I: expert proctoring, group II: educational video only, group III: independent training).
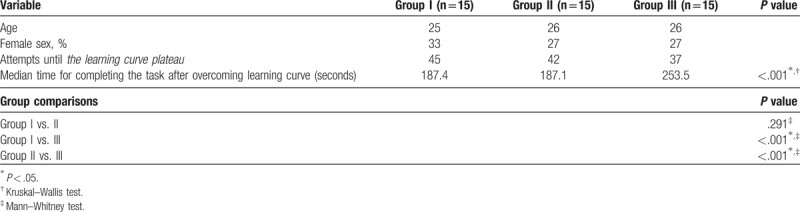
Figure 1.
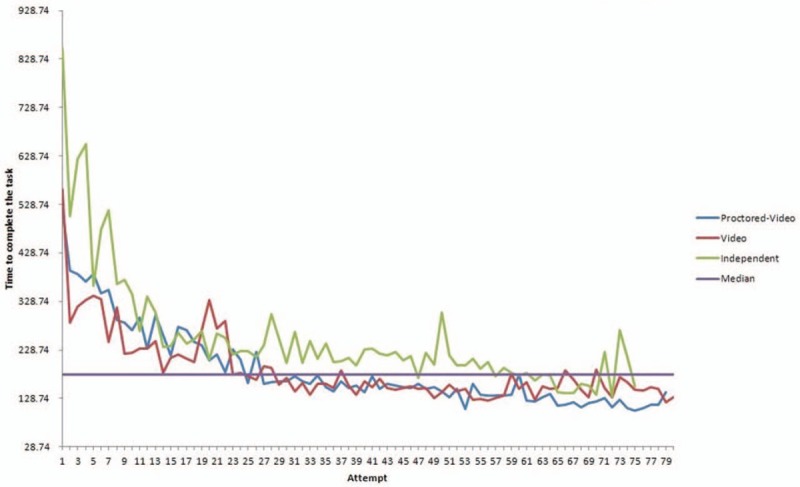
Line plot showing the time to complete the task in the 3 groups for each trial.
Additionally, based on the CUSUM chart, we determined the ‘acquisition of proficiency level’ target learning time as a target learning time of 150.0 seconds and overall score of 70 or higher calculated by a computerized built-in scoring algorithm. In group I, the number of attempts before reaching the learning curve plateau (150.0 seconds) was 45 repetitions. In groups II and III, the numbers of attempts required to reach the learning curve plateau were 42 and 37, respectively (Fig. 2). The aforementioned number of attempts indicates that there was continuous improvement in the time required to perform the task after 40 repetitions only in groups I and II. All 3 groups acquired an overall score of 70 or higher.
Figure 2.
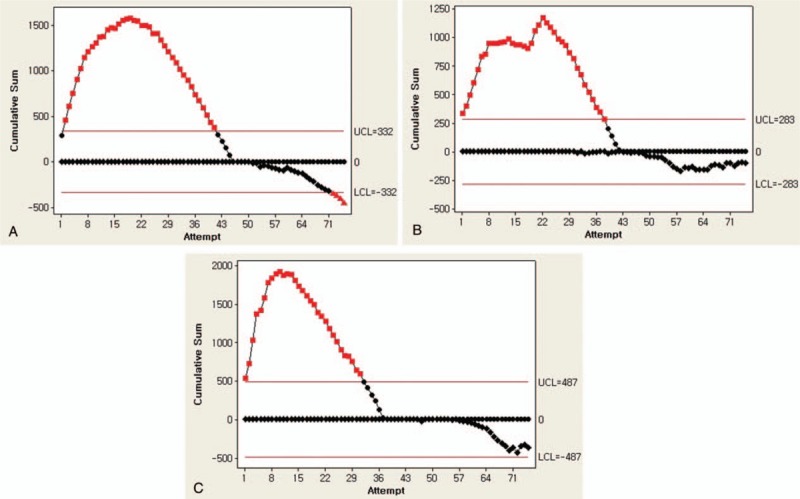
Learning curves of the proctoring group (A), video only group (B), and independent group (C) depicted by the cumulative sum chart. LCL = lower cumulative limit, UCL = upper cumulative limit.
The mean time for completing the task was significantly different in each group. The time needed to complete the task was the shortest in group I and longest in group III (group I vs. group II vs. group III: 137.23, 147.61, and 193.60 seconds, respectively). We also evaluated the time to end the task after overcoming the learning curve. The mean time for completing the task was significantly different in each group (group I vs. group II vs. group III: 187.38 vs. 187.07 vs. 253.47 seconds, P < .001). Results between group I and group III/group II and group III were statistically different, indicating that the independent training method was inferior to the other teaching methods (P < .001). However, there was no significant difference when comparing group I and group II, which suggests that the educational video may be as beneficial as expert proctoring (P = .291; Fig. 3).
Figure 3.
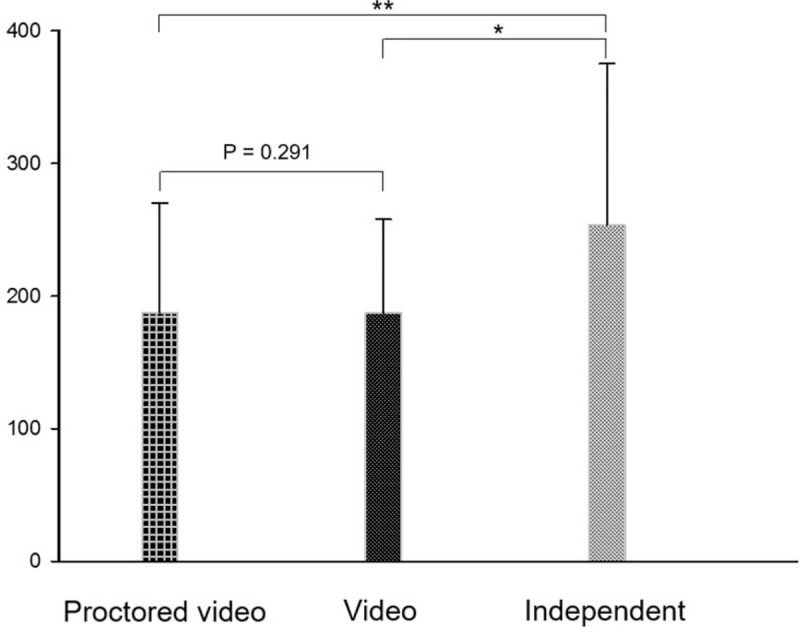
Comparisons of the mean time differences for completing the task among the 3 groups after overcoming learning curve. ∗, ∗∗: statistically significant (P < .05) between the 2 groups.
4. Discussion
A robotic virtual reality simulator (RVRS) is an effective platform for surgical skill training, especially for robotic surgery.[12,13] In our study, there was no significant difference between subjects with expert proctoring and those who viewed an educational video only in achieving skill acquisition, but both groups yielded significant improvement compared to those with independent training.
To maximize the RVRS training benefits, simulation could assist the surgeon in achieving a predetermined proficiency level for a specific procedure. Therefore, more sophisticated and complex procedure-specific modules are imminent in robotic simulator. These complex procedures require surgeon to perform more repetitions to acquire proficiency, but there is no consensus on how the trainee should practice effective repetitions.
Currently available training methods consist of “observing while experts operate” and “practicing on animals and nonliving models before operating on humans”.[14] These limited number of training tools may expose a large number of patients to the potential risks due to the learning curves of early-stage surgeons. Proctoring is a very important factor of the training process.[15] This is a core master-apprentice model that is used in the operating room. Even in laparoscopic prostatectomy, which has a very steep learning curve, a closed mentor-trainee approach is known to decrease the learning curve.[16] Furthermore, intensive training programs are known for decreasing the complication rates of laparoscopic procedures.[17] However, since this method is a very time-consuming and effortful way of teaching, it may be worthwhile to consider alternatives.[6]
It is noteworthy that many surgeons who are preparing to perform robotic surgery receive some help from educational video. An educational video can help the trainees, especially with a relatively complex simulator module, and reflect the module developer's intention. Previously, we developed the Tube 3 module because we realized that standardized hand movement may be used when VUA is performed by experts. In the expert video, we identified effective needle drivers’ movements during VUA, including the grasp method or needle position. The VUA may be one of the most challenging and important procedures in RARP. Tube 2 has been introduced as a complex procedure in previous studies. Furthermore, to perform the analysis of rigorous repetition schedules, the “Tube 2” task was selected as the complex task in this study. Jonsson et al showed that suitable tasks with high complexity are recommended when designing curricula for robotic training.[18]
However, with the independent training method, it is difficult for the trainee to decipher the intention of module developer and effectively learn the difficult hand movements. Therefore, if well-made educational video is offered, its effectiveness would be maximized for early-stage surgeons as well as novices.
Meanwhile, the group III reach the end of their learning curve faster than in the other groups. As mentioned in results, the final estimated time for completing the task was much longer in group III than other groups which means that there was continuous improvement in performing the task only in groups I and II. The CUSUM graph has the advantage of representing this point.
The present study is not without limitations. First, each group contained a relatively small number of subjects (15 individuals per group), and the study participants were medical students. Second, no suture material was used in Tube 2. If suture material is added, latency in the image would compromise the virtual realism; thus, this issue needs addressed.
5. Conclusions
With increasing adoption of minimally invasive surgery, the need for structured and standardized approaches to surgical education becomes important. Additionally, standardized approaches must be paired with a predetermined proficiency level and this needs to be adapted to the training level. To acquire proficiency, proctoring is an effective method, but time and space constraints can be the main obstacle.
Therefore, it cannot be emphasized enough that another effective teaching method should be sought. In this study, we found that an educational video can be as beneficial as proctoring, which implies that the development of appropriate standardized, educational videos is important.
Author contributions
Conceptualization: Jeong Gu Lee, Jun Cheon, Sung Gu Kang.
Data curation: Jae Yoon Kim.
Formal analysis: Jong Hyun Pyun.
Investigation: Seok Cho.
Methodology: Mi Mi Oh, Seok Ho Kang.
Supervision: Jeong Gu Lee.
Validation: Je Jong Kim.
Writing – original draft: Ji Sung Shim.
Writing – review & editing: Sung Gu Kang.
Footnotes
Abbreviations: CUSUM = cumulative sum control chart, RARP = robotic assisted radical prostatectomy, RVRS = robotic virtual reality simulator, VUA = vesicourethral anastomosis.
Ethics approval and consent to participate: This study was approved by the Institutional Review Board in our center.
The authors have no conflicts of interest to disclose.
References
- [1].Kang SG, Yang KS, Ko YH. A study on the learning curve of the robotic virtual reality simulator. J Laparoendosc Adv Surg Tech A 2012;22:438–42. [DOI] [PubMed] [Google Scholar]
- [2].Bareeq RA, Jayaraman S, Kiaii B, et al. The role of surgical simulation and the learning curve in robot-assisted surgery. J Robot Surg 2008;2:11–5. [DOI] [PubMed] [Google Scholar]
- [3].Manes J, Robin DA. A motor learning perspective for optimizing intervention intensity. Int J Speech Lang Pathol 2012;14:447–50. [DOI] [PubMed] [Google Scholar]
- [4].Kang SG, Ryu BJ, Yang KS. An effective repetitive training schedule to achieve skill proficiency using a novel robotic virtual reality simulator. J Surg Educ 2015;72:369–76. [DOI] [PubMed] [Google Scholar]
- [5].Lee JY, Mucksavage P, Sundaram CP, et al. Best practices for robotic surgery training and credentialing. J Urol 2011;185:1191–7. [DOI] [PubMed] [Google Scholar]
- [6].Schreuder HW, Wolswijk R, Zweemer RP, et al. Training and learning robotic surgery, time for a more structured approach: a systematic review. BJOG 2012;119:137–49. [DOI] [PubMed] [Google Scholar]
- [7].Albani JM, Lee DI. Virtual reality-assisted robotic surgery simulation. J Endourol 2007;21:285–7. [DOI] [PubMed] [Google Scholar]
- [8].Sethi AS, Peine WJ, Mohammadi Y, et al. Validation of a novel virtual reality robotic simulator. J Endourol 2009;23:503–8. [DOI] [PubMed] [Google Scholar]
- [9].Kenney PA, Wszolek MF, Gould JJ, et al. Face, content, and construct validity of dV-trainer, a novel virtual reality simulator for robotic surgery. Urology 2009;73:1288–92. [DOI] [PubMed] [Google Scholar]
- [10].Hung AJ, Patil MB, Zehnder P. Concurrent and predictive validation of a novel robotic surgery simulator: a prospective, randomized study. J Urol 2012;187:630–7. [DOI] [PubMed] [Google Scholar]
- [11].Wu Z, Yang M, Khoo MBC, et al. What are the best sample sizes for the Xbar and CUSUM charts? Int J Prod Econ 2011;131:650–62. [Google Scholar]
- [12].Le CQ, Lightner DJ, VanderLei L, et al. The current role of medical simulation in American urological residency training programs: an assessment by program directors. J Urol 2007;177:288–91. [DOI] [PubMed] [Google Scholar]
- [13].Liss MA, Abdelshehid C, Quach S. Validation, correlation, and comparison of the da Vinci trainerTM and the daVinci surgical skills simulatorTM using the MimicTM software for urologic robotic surgical education. J Endourol 2012;26:1629–34. [DOI] [PubMed] [Google Scholar]
- [14].Hung AJ, Jayaratna IS, Teruya K, et al. Comparative assessment of three standardized robotic surgery training methods. BJU Int 2013;112:864–71. [DOI] [PubMed] [Google Scholar]
- [15].Rashid HH, Leung YY, Rashid MJ, et al. Robotic surgical education: a systematic approach to training urology residents to perform robotic-assisted laparoscopic radical prostatectomy. Urology 2006;68:75–9. [DOI] [PubMed] [Google Scholar]
- [16].Fabrizio MD, Tuerk I, Schellhammer PF. Laparoscopic radical prostatectomy: decreasing the learning curve using a mentor initiated approach. J Urol 2003;169:2063–5. [DOI] [PubMed] [Google Scholar]
- [17].Cadeddu JA, Wolfe JS, Jr, Nakada S. Complications of laparoscopic procedures after concentrated training in urological laparoscopy. J Urol 2001;166:2109–11. [PubMed] [Google Scholar]
- [18].Jonsson MN, Mahmood M, Askerud T. ProMIS can serve as a da Vinci simulator—a construct validity study. J Endourol 2011;25:345–50. [DOI] [PubMed] [Google Scholar]