

Abstract
Previous ankle exoskeleton assistance techniques that were able to demonstrate metabolic reductions can be categorized into those that delivered moment profiles similar to the biological ankle moment throughout the stance phase, and others that delivered positive power only during push off. Both assistance techniques and a powered-off condition were compared in treadmill walking (1.5 m s−1) with a soft exosuit. We hypothesized that both techniques can result in a similar metabolic reduction when providing a similar level of average positive exosuit power at each ankle (0.12 W kg−1) and hip (0.02 W kg−1) while the underlying global center-of-mass and local joint biomechanics would be different. We found a similar net metabolic rate reduction of 15% relative to walking with the suit powered-off for both techniques. The ankle moment inspired technique showed larger magnitudes of reductions for biological moment and power at the hip and the ankle. The ankle power inspired technique might benefit from higher biological efficiency, when reducing positive instead of negative power at the knee and when almost keeping the isometric function of the plantarflexors before push-off. Changes at the ankle caused energetic reductions at the knee, hip and the center-of-mass. A major contribution to metabolic reduction might be based on them. As the lower limb biomechanics that led to these reductions were different, we believe that humans alter their gait to maximize their energetic benefit based on the exosuit assistance. For further insights on mechanisms that lead to metabolic reduction, joint mechanics and muscle-tendon dynamics must be analyzed in combination.
Keywords: exosuit, control, moment, power, assistance
Introduction
Exoskeletons are developed to assist healthy individuals and users with mobility impairments. One major goal of exoskeletons is to reduce the metabolic rate (MR) of walking by providing passive or active assistance (Collins et al., 2015; Jackson and Collins, 2015; Koller et al., 2015, 2018; Lee et al., 2016; Mooney and Herr, 2016; Panizzolo et al., 2016; Seo et al., 2016).
A key factor to achieve a reduction in MR of walking with an exoskeleton is the assistance technique, or otherwise stated, the high level controller used to generate the mechanical assistance profile with a certain magnitude and timing. Some exoskeletons are programmed to actuate following specific moment or power patterns (Jackson and Collins, 2015; Lee et al., 2016; Seo et al., 2016), while others are programmed to act in response to measurable biological signals such as electromyography (EMG) (Koller et al., 2015, 2018). Depending on the inspiration and implementation, the duration and timing of the applied assistance varies.
Active ankle assistance was applied for about 150 ms with the peak at about 53% of the gait cycle for (Mooney et al., 2014) and (Lee et al., 2016). Both approaches used the passive structures of their systems to pretension cable actuators in advance. Assistance with an earlier onset and longer duration was applied in (Collins et al., 2015; Koller et al., 2015, 2018; Sawicki and Ferris, 2009) where assistance starts at foot flat which occurs at about 10% of the gait cycle. Slightly later onset timings were used in (Quinlivan et al., 2017) and ranged from 22% to 28% depending on the level of assistance. When onset timing for plantarflexion assistance was varied with a pneumatic exoskeleton (13 to 54%), the highest metabolic reductions were achieved at 43% (Malcolm et al., 2013), which is similar to the timing used in (Mooney et al., 2014) and (Lee et al., 2016). When the assistance profile was optimized online, based on MR for individuals, the optimal onset timing was found to be between 17% and 37% of a gait cycle (Zhang et al., 2017). Almost the same range of onset was used in (Malcolm et al., 2017) to study the effects of assistance with negative ankle work. For this study, highest metabolic reductions were achieved with the onset at about 17%.
Based on these past studies and others, ankle assistance techniques for the stance phase that were able to demonstrate metabolic reductions can be grouped into two fundamental techniques. The first technique is designed to supply positive exoskeleton ankle power and creates assistive plantarflexion moments mainly during the push off (Lee et al., 2016; Malcolm et al., 2013; Mooney and Herr, 2016). This assistance technique targets the reduction of biological joint moments and power during push off and will be referred to as the ankle positive power inspired technique (APIT). Such a concept seems advantageous as most of the positive work during gait comes from ankle plantarflexion during push off (Farris and Sawicki, 2011) and previous studies have shown that increasing positive work at the ankle is beneficial to reduce the MR of walking (Caputo and Collins, 2014; Quinlivan et al., 2017; Zhang et al., 2017). The second technique creates a plantarflexion moment profile, similar to the positive biological ankle moment, starting early in stance (Collins et al., 2015; Koller et al., 2015, 2018; Quinlivan et al., 2017; Sawicki and Ferris, 2009). This assistance technique, referred to as the ankle moment inspired technique (AMIT), targets the reduction of biological joint moments and power throughout stance.
In a previous comparison of AMIT and APIT with a unilateral ankle exoskeleton, metabolic benefits were only observed for APIT (Jackson and Collins, 2015). However, others have found metabolic reductions when applying AMIT bilaterally (Quinlivan et al., 2017).
Global and local biomechanical parameters as well as muscle behavior were used to explain the metabolic reductions associated with exoskeleton walking assistance. One assumed reason for the metabolic reduction in Jackson and Collins (2015) was the increased exoskeleton-side center-of-mass (COM) push-off work in combination with the reduction in contralateral-limb collision and rebound work. Other authors hypothesized that a reduction of vertical CoM power may reduce MR of walking (Gordon et al., 2009; Ortega and Farley, 2005). While they were not able to prove this theory in unassisted walking it might be true for assisted walking.
When increasing assitive hip and ankle peak moment and average power, biological parameters and metabolic effort were reduced in Quinlivan et al. (2017). Further, MR was negatively correlated with net exoskeleton power in Zhang et al. (2017), but minimizing MR was not equivalent to maximizing exoskeleton mechanical work.
Also muscle electromyographic signals (EMG) have been used for MR explanations. Several studies showed that parallel forces in line with the human muscles could reduce plantarflexor muscle activity during walking (Collins et al., 2015; Koller et al., 2015; Sawicki and Ferris, 2009). In line with reduced muscle activity, force related metabolic consumption of muscles (Maas et al., 1989; Sanchez et al., 1979) may have decreased. On the other hand studies showed that muscle activity was reduced while the metabolic effort increased (Collins et al., 2015; Jackson and Collins, 2015). Muscle-tendon behavior was used to explain these contrary results. In (Jackson et al., 2017) it was found that an ankle exoskeleton can potentially disturb the muscle-tendon interaction to cause increased muscular effort.
Previous studies for loaded (APIT, (Lee et al., 2016)) and unloaded (AMIT, (Quinlivan et al., 2017)) walking showed almost similar metabolic reductions when applying similar positive exosuit power.
Thus we hypothesized that similar metabolic reductions can be achieved in unloaded walking with different assistance techniques when providing a similar level of average positive exosuit power bilaterally. It was assumed that global CoM power and local joint angle, moment and power characteristics would be different for both techniques.
Methods
The study compared the metabolics, biomechanics and underlying energetics of two different assistance techniques (AMIT and APIT, Fig. 1) relative to an unpowered condition (POWERED-OFF). The AMIT and POWERED-OFF data used for this article are part of the dataset analyzed in (Quinlivan et al., 2017). The APIT data was measured in the same experiment but not published in past work. For comparison, one out of four AMIT conditions was selected that had a similar level of average positive exosuit ankle and average positive exosuit hip push-off power as APIT (AMIT, ankle 0.12±0.02 and hip 0.02±0.01 W kg−1 per leg; APIT, ankle 0.12±0.03 and hip 0.02±0.01 W kg−1 peg leg). The soft exosuit and the tethered offboard actuation are described only briefly in this work; further details can be found in (Lee et al., 2016; Quinlivan et al., 2017) and their supplementary information.
Figure 1:
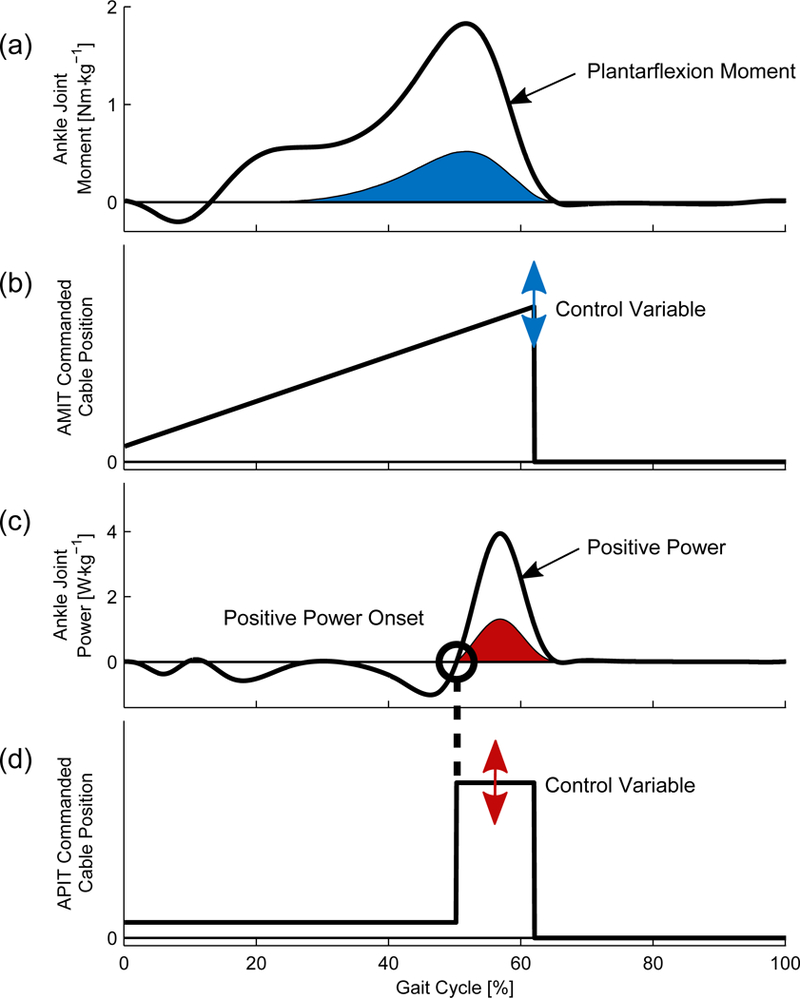
Example position trajectories of the AMIT (a & b) and APIT (c & d). The AMIT performs a force-based position control in attempt to produce a percentage of the ankle moment. The APIT performs power-based position control using the ankle speed zero-crossing to ensure that assistance delivered by the exosuit coincides with the positive biological ankle power.
Soft exosuit and offboard actuators
The used soft exosuit was designed to assist with ankle plantarflexion and hip flexion (Fig. 2), as previously described in (Lee et al., 2016; Quinlivan et al., 2017). The exosuit consisted of a spandex base layer, a waist belt, two calf wraps, and four vertical straps (two per leg) crossing from the back of the calf wrap, through the approximate center of the knee joint axis, to the front of the waist belt. Two motor driven offboard actuators were used to generate assistive forces. Bowden cables were used to transmit those forces to the soft exosuit local to the wearers ankle. On the human side, the Bowden cable sheath connected to the back of the calf wrap and the bottom of the vertical straps, while the inner cable extended further and attached to a metal bracket at the back of the heel of the boot. As the motor retracted the inner cable, the distance between the two attachment points was shortened, generating a force that was distributed between the calf wrap and the vertical straps (Lee et al., 2016). At each foot and shank a gyroscope was attached to measure angular velocity of the limb segments online. A load cell was fixed below each calf wrap in series with the Bowden cable to measure the force delivered to the suit. Additionally, two load cells were fixed at the left side of the exosuit to measure the assistive force transmitted through the vertical straps to the hip joint (Lee et al., 2016; Quinlivan et al., 2017).
Figure 2:
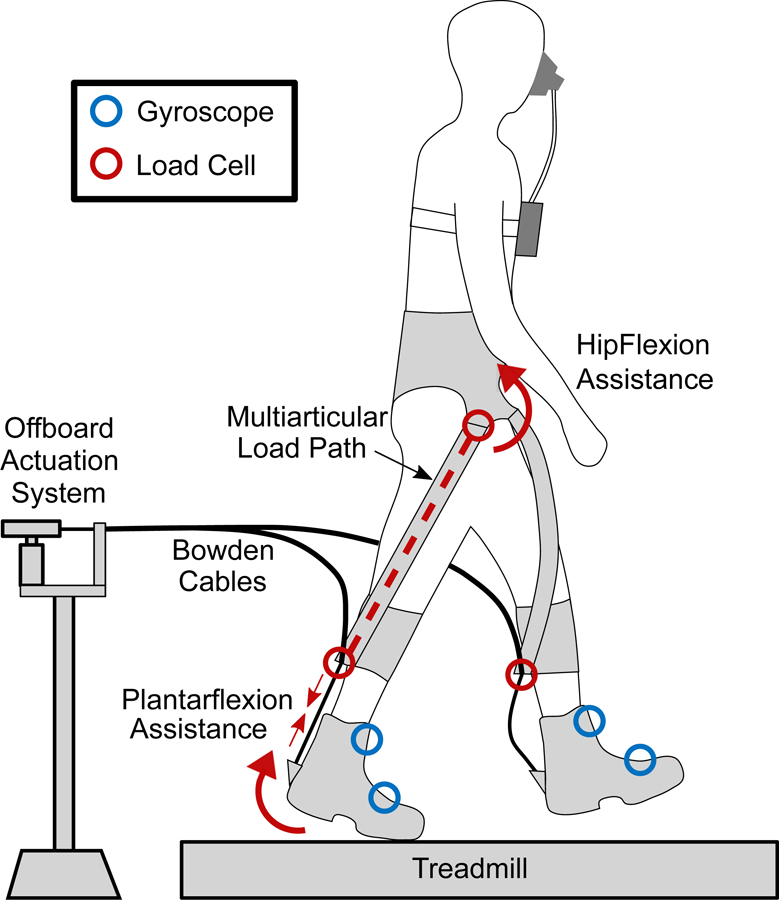
Experimental setup with the offboard actuation system and the multi-articular soft exosuit that assists with both ankle plantarflexion and hip flexion.
Assistance techniques
Ankle moment inspired technique (AMIT): As described in (Quinlivan et al., 2017), the high-level cable position profile was designed to deliver a similar assistive torque with a typical ankle moment while walking, considering the force-displacement characterization of the human-exosuit system (Asbeck et al., 2015) as well as the ankle kinematics and kinetics during walking (Winter, 1987), similar to the robotic-tendon methodology proposed by (Hollander et al., 2006). The cable position profile was approximated as a linear function during the stance phase, which is depicted in Fig. 1 (a and b). Constant retracting speed was iteratively adapted during walking by a force-based position control on a step-by-step basis to reach a maximum peak force of 56.2% of the subjects body weight (5.6±0.2 N kg−1) in late stance. The approach resulted in an average positive exosuit ankle power of 0.12 W kg−1 per leg.
Ankle positive power inspired technique (APIT): As shown in Fig. 1 (c and d) and previously described in (Lee et al., 2016), this technique delivers assistance predominantly during the positive power phase at ankle. Two gyroscopes per leg were used to detect the zero-crossing of ankle angular velocity, which represents the transition from the negative (dorsiflexion) to positive (plantarflexion) power phase. During the negative power phase, the system held the cable at a constant position to generate a passive pretension, and as soon as the zero-crossing was detected, the system retracted the cable to generate active force to deliver positive power to the ankle. The system performed power based position control to iteratively regulate the cable retraction amplitude on a step-by-step basis, delivering an average of 7.93 W (0.12 W kg−1) of positive exosuit power assistance per ankle (Lee et al., 2016).
For both active conditions, the rest length of the cable position was set during a warm-up condition to achieve a maximum force of 10 N in the cable over the gait cycle while walking without actuation.
Experimental Protocol
Seven healthy (26.71±4.75 y; 68.43±9.46 kg; 1.74±0.06 m; mean±SD) adult males participated in this study. The study was approved by the Harvard Long-wood Medical Area Institutional Review Board and all subjects provided written informed consent before their participation. All participants attended a training session and a testing session where they walked under different conditions in a random order on a treadmill at 1.50 m s−1. For this article three of the five minutes lasting conditions are compared: AMIT, APIT and a POWERED-OFF condition for baseline comparison. We chose to use a POWERED-OFF condition as opposed to a condition while walking without the exosuit to reduce the length of testing sessions and avoid repositioning the markers used for kinematic analysis which could have led to increased variability. Further, the main focus was the comparison of both assistance techniques, rather than the comparison to baseline. Further, the minimal mass of the exosuit (medium size textiles in total 0.89 kg) and the ability to move your joints freely, will only cause minor changes for the used baseline walking kinematics and kinetics as observed in another lightweight design (Collins et al., 2015).
Joint Kinetics and Kinematics
Reflective markers were used to capture body segment motion (see appendix for details) during walking with a motion capture system (Vicon, Oxford Metrics, Oxford, UK; 120 Hz).
Three-dimensional ground reaction forces (GRF) were measured using an instrumented split-belt treadmill (Bertec, Columbus, OH, USA; 2160 Hz). Marker and force trajectories were filtered using a zero-lag 4th order low pass Butterworth filter. A 5–9 Hz optimal cut-off frequency was selected using a custom residual analysis algorithm (MATLAB, MathWorks, Natick, MA, USA). Kinematic and inverse dynamics analyses (Visual3D, C-Motion, Rockville, MD, USA) were used to determine joint angles, total joint moments, and total joint powers for the sagittal plane of the right leg. Direct kinematics were used to calculate joint angles and angular velocities. The hip (between pelvis and thigh) and knee (between thigh and shank) angle were based on the absolute segment angles. In contrast, the ankle angle (based on the shank and foot) was adapted to be zero in standing using the static pose from the beginning of the measurement.
For the inverse dynamics analysis, segment masses were taken from (Hanavan and Ernest, 1964). Segment moments of inertia were estimated by modeling each segment as a frustum of a right cone of uniform density with proximal and distal radii measured during a standing pose taken at the beginning of each session (Kwon, 1996; Zatsiorsky, 2002).
The start of the plantarflexion was defined as the timing for the maximum ankle dorsiflexion. To determine single strides, an automatic gait event detection algorithm from Visual3D was used. Ten strides from the final minute of each condition were used to generate mean kinematic and kinetic data for each participant and condition. These subject means were subsequently combined to calculate condition mean data.
To compute exosuit related values, data from the suit-mounted sensors was synchronized with the motion capture system. Ankle exosuit moment was calculated by multiplying the load cell forces by the corresponding ankle moment arm which was determined by the perpendicular distance between the joint center and the line between markers on either end of the exposed Bowden cable. Exosuit hip flexion moments were calculated using forces from the vertical strap load cells and the perpendicular distance between the hip joint center and the line between two markers on the vertical straps. Moment and power values were normalized by each participant’s body mass. Biological moment and powers were calculated as the difference between total and exosuit values.
Center of Mass
The center of mass (CoM) position and velocity were calculated based on the ground reaction forces of both limbs. CoM power was calculated only for the right limb as proposed in (Donelan et al., 2002). Total center of mass power was defined as the dot product of ground reaction force with center of mass velocity (Donelan et al., 2002). Average collision, rebound, preload and push-off CoM power were defined as described in Jackson and Collins (2015). Vertical center of mass (CoM) excursion was determined by subtracting the lowest from the highest vertical individual leg CoM position throughout one stride. Vertical CoM power was defined as the product of the vertical ground reaction force and the vertical CoM velocity. CoM power was normalized to body mass.
Metabolic rate
Metabolic rate (MR) was assessed by indirect calorimetry (K4b2, Cosmed, Rome, Italy). The last two minutes of carbon dioxide and oxygen rate were averaged for each condition. Metabolic power was calculated using a modified Brockway equation (Brockway, 1987). Net MR was obtained by subtracting the MR in standing (measured in advance of walking trials) from the MR measured in the walking conditions. Reported net metabolic reduction for the two active conditions were calculated as the difference between the net MRs in the active and POWERED-OFF conditions. Metabolic values were normalized to subjects body mass.
Statistics
A repeated measures ANOVA was performed to check for overall differences in between conditions. Mauchly’s test was used to check for sphericity. If it was not met, the Greenhouse-Geisser method was used to adapt p-values. If there was a significant difference in between conditions (p<0.05), a paired t-tests with a Šídák-Holm step-down correction for multiple comparisons (Peter et al., 2000) was used to determine individual condition differences. Significant differences were indicated by two stars (p<0.01) or one star (p<0.05).
Results
Metabolics
AMIT and APIT reduced the net MR of walking relative to POWERED-OFF by 0.72±0.21 W kg−1 (14.78±3.63%) and 0.74±0.30 W kg−1 (15.36±5.53%),respectively.
Average net power
No significant difference was found for the average net power at the ankle (APIT: 0.4±0.08 and AMIT, 0.36±0.08 W kg−1) and the hip (AMIT: 0.22±0.09 and APIT: 0.2±0.15 W kg−1). In contrast, without assistance the average net power was less than half for the ankle (0.16±0.05, p < 0.01 compared to AMIT and APIT) and slightly higher for the hip (0.26±0.1 W kg−1, p < 0.01 compared to AMIT).
Hip joint
Compared to POWERED-OFF and AMIT, APIT showed reduced hip flexion angle at heel strike (Fig. 3). Both techniques reduced the peak and average negative biological moment compared to POWERED-OFF, but the reductions were greater for AMIT than APIT (Fig. 4). In addition, peak and average exosuit hip moment and power (both negative) were larger for AMIT than for APIT. Both AMIT and APIT showed a significant decrease in peak total and biological hip push off power and average positive biological hip power compared to POWERED-OFF (Fig. 4). Peak negative biological and average positive total hip power were only reduced for AMIT compared to POWERED-OFF.
Figure 3:
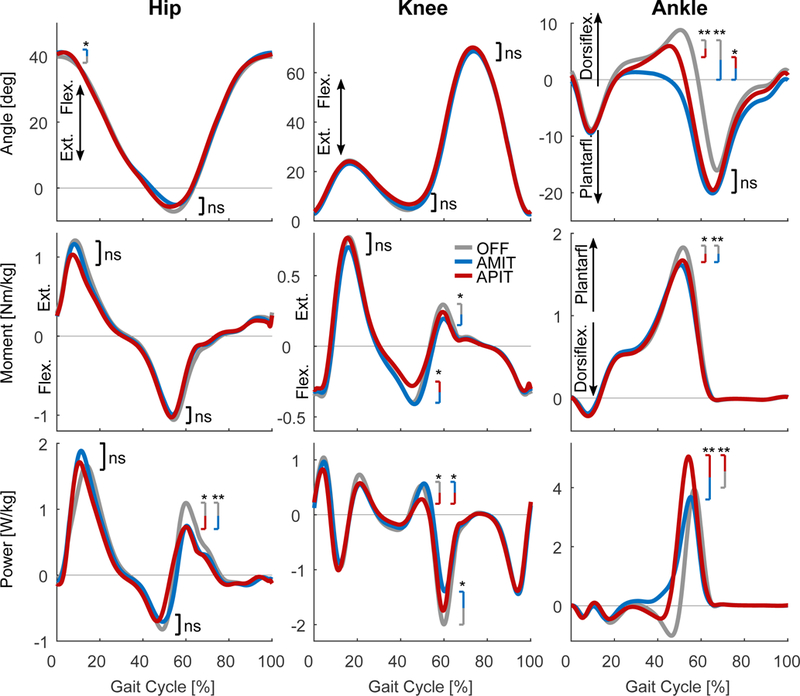
Mean hip, knee, and ankle angle, total moment, and total power for POWERED-OFF, AMIT, and APIT. Significant (star) and no significant (ns) differences are indicated.
Figure 4:
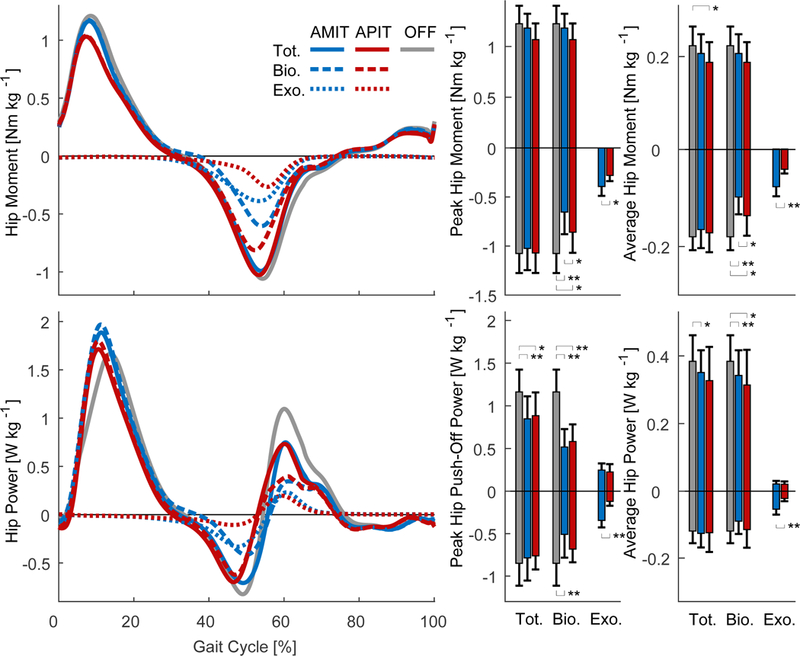
Total, biological and exosuit hip moment and power over the gait cycle for POWERED-OFF, AMIT and APIT. Bar plots indicate peak positive and negative hip moment and power as well as average positive and negative hip moment and power including standard deviation.
Knee joint
No change in knee angle was found across conditions (Fig. 3). Compared to POWERED-OFF, AMIT reduced knee extension moment and power (late push off) and APIT total knee flexion moment and total knee flexion power (early push off).
Ankle joint
Less peak dorsiflexion as well as an earlier onset of plantarflexion were identified for AMIT compared to APIT and POWERED-OFF (Fig. 3, Tab. 1). Both reduced peak and average positive biological moment compared to POWERED-OFF while the decrease was larger for AMIT than for APIT. A significant increase in peak positive total power was found for APIT compared to AMIT and POWERED-OFF (Fig. 3). For both techniques, average negative total and biological power were reduced compared to POWERED-OFF, but the reductions were significantly greater for AMIT compared to APIT (Fig. 5). AMIT also reduced the total negative average ankle power compared to POWERED-OFF and the biological positive average ankle power compared to APIT.
Table 1:
Stride length and time, Duty factor, vertical CoM excursion and start time of plantarflexion for POWERED-OFF, AMIT and APIT.
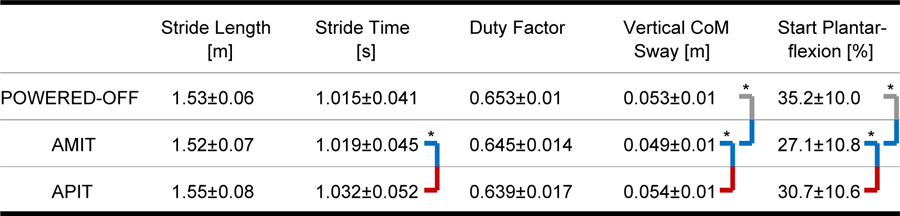 |
Figure 5:
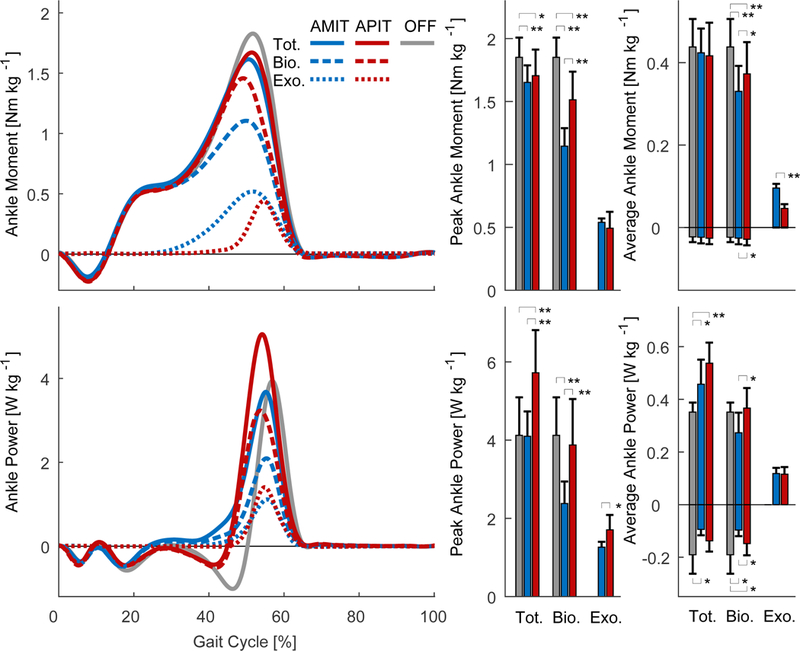
Total, biological and exosuit ankle moment and power over the gait cycle for POWERED-OFF, AMIT and APIT. Bar plots indicate peak ankle positive moment, peak ankle positive power, and positive and negative average ankle moment and power.
Center of mass
Compared to APIT and POWERED-OFF, a decreased vertical CoM excursion (Tab. 1) and less positive and negative average vertical CoM power (Fig. 6) were identified for AMIT. While the average CoM push-off power was increased for APIT compared to AMIT and POWERED-OFF, for both AMIT and APIT average CoM rebound power decreased compared to POWERED-OFF (Fig. 7).
Figure 6:

Vertical center of mass power for the right limb over the gait cycle for POWERED-OFF, AMIT and APIT. The bar plot indicates the average positive and negative vertical CoM power. Averages are not including the small negative area at the beginning and the small positive are at the end of stance phase.
Figure 7:
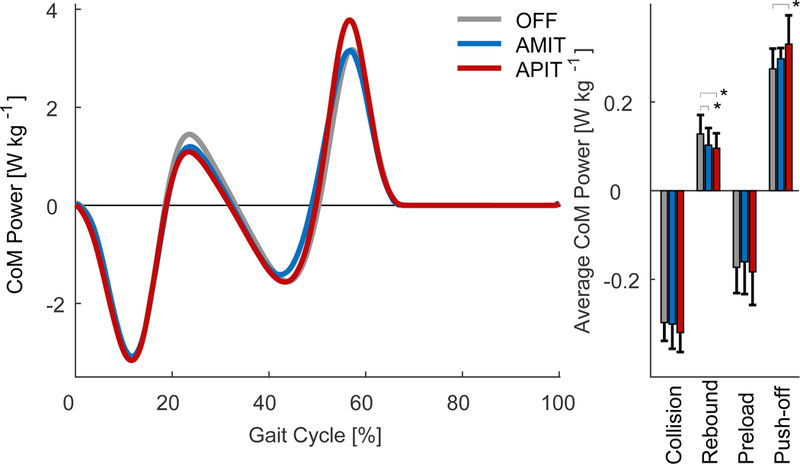
Total center of mass power for the right limb normalized to body mass over the gait cycle and phase specific average CoM power for POWERED-OFF, AMIT and APIT.
Discussion
In the present study two assistance techniques with different joint moment timing and magnitude but similar level of average positive exosuit power were compared that resulted in a similar reduction in average net MR relative to the POWERED-OFF condition.
Major similarities between the two techniques can be found at the hip where both AMIT and APIT showed similar reductions in total and biological positive hip power. These changes are in line with a study on the relationship between ankle plantarflexion and hip flexion where reductions in total hip flexion moments were found when subjects voluntarily increased their push off work at the ankle joint (Lewis and Ferris, 2008). Like the authors of the study, we assumed that an increase in ankle push off work may unload the proximal joints, and thus, may contribute to the MR reduction. Such unloading for the hip was also reported with other ankle exoskeletons (Koller et al., 2015, 2018; Mooney and Herr, 2016). Further, the multiarticular exosuit coupling from the ankle to the hip might additionally facilitate this process.
Biological changes were more pronounced for AMIT than for APIT. For example, peak and average positive biological ankle moments were reduced for both techniques, but significantly larger magnitudes were identified for AMIT. In addition, AMIT reduced peak negative biological power at hip and peak and average positive biological power at ankle. Both the reduction in biological moment and power may contribute to the reduction of MR, as assumed in previous studies (Collins et al., 2015; Jackson and Collins, 2015; Mooney and Herr, 2016; Quinlivan et al., 2017; Farris et al., 2013).
Further, increased average CoM push-off power might have reduced the average rebound power for APIT as observed in (Jackson and Collins, 2015) and thus the metabolic rate. In contrast, average CoM rebound power was also reduced for AMIT by probably reducing vertical CoM excursion and power. Voluntary reduction of vertical CoM power was previously tested (Gordon et al., 2009; Ortega and Farley, 2005) for unassisted walking. Authors found increases in MR of walking due to increases in hip and ankle positive work. In contrast, the exosuit provided additional positive work to both joints, which might be a way to benefit from the idea of reducing vertical CoM power to reduce metabolic cost of walking.
Given the greater joint-level reductions for AMIT relative to APIT, the similar level of overall metabolic reductions may be outside of ones expectation. One potential explanation could be the total and biological negative ankle power, which were larger for APIT compared to AMIT. This larger negative ankle power may mean that with APIT subjects could store more energy in the Achilles tendon during dorsiflexion, which could be reused to support the push off (Ishikawa et al., 2005). Furthermore, due to the kinematic changes at the ankle during the stance phase for AMIT, calf muscle contraction may have been changed to be more concentric or eccentric rather than isometric. The former two have been shown to be less efficient (Ryschon et al., 1997), and thus, may have a negative effect on MR. Similar effects were assumed for another exoskeleton study that found increases in MR for specific exoskeleton stiffness values (Collins et al., 2015). It is assumed that the parallel stiffness of the exoskeleton changed the overall joint stiffness, previously defined by the tendon stiffness when the muscle fibers act isometric. Due to changed overall stiffness human muscle fibers have to adapt their tension to suboptimal solutions, to adjust for the desired joint moment and angle during gait. Such an decrease in human muscle-tendon efficiency was also assumed in (Jackson et al., 2017) for an AMIT like assistance approach in walking and in (Farris et al., 2013, 2014) for assisted hopping. Increased fascicle excursion Farris et al. (2013), increased fiber velocity or a shift to less favorable muscle fiber lengths (Farris et al., 2014) were assumed as a reasons for reduced efficiency. Of note, the muscle-tendon efficiency may be affected also by the changes in spatio-temporal parameters (Umberger and Martin, 2007); thus, when an assistive device alters stride time, length, or frequency (as in APIT), the muscle-tendon dynamics may be influenced by the combined effect between (i) the local/direct changes due to the exosuit stiffness and (ii) the global/indirect change related to whole-body spatio-temporal changes.
Another explanation for the similar metabolic benefit may be the differences in the reduction of total knee power compared to POWERED-OFF. For APIT reduced positive power was found for knee flexion during push off, whereas for AMIT reduced negative power was found to stop knee flexion during push off. Considering that a muscle’s concentric behavior involving positive power is less efficient than an eccentric behavior with negative power (Ryschon et al., 1997), this may partly explain benefits for APIT. Interestingly, for APIT knee power reductions occurred during midstance before exosuit assistance within a stride; this may imply that the changes at knee were not a direct result from the applied moment to the body, but a result from humans’ continuous attempt to optimize the overall cost of walking with the existence of external assistance.
Overall, APIT and AMIT had a similar metabolic reduction relative to POWERED-OFF for similar levels of delivered average positive power and average net power (hip and ankle); however, the underlying biomechanical changes that may have led to this metabolic reduction appear to be different. This suggests that with a similar level of power delivered, humans may alter their gait in an effort to maximize their energetic benefit. Such a hypothesis aligns with findings from other studies such as Selinger et al. (Selinger et al., 2015) which found that during walking subjects alter their gait in an attempt to minimize their walking energetics. We believe that the proximal joints and the CoM have a major role for this adaptation as they might contribute a major part to the metabolic reduction. The theory of a global energetic gait optimization is strengthened by training studies with ankle exoskeletons, which showed that the ankle function was optimized with training to further unload the proximal joints (Koller et al., 2015; Wiggin and Sawicki, 2012). As only two profiles were explored in this study, subsequent studies are necessary to draw more definitive conclusions regarding the relation of metabolic reduction, positive exosuit power and net power.
Conclusion
The study identified similar metabolic reductions for AMIT and APIT relative to a POWERED-OFF condition when delivering similar average positive exosuit power, while underlying kinematic and kinetic adaptations were widely different. Assistance with AMIT resulted in larger magnitudes of reductions for biological moment and power at the hip and ankle. Alternatively, we hypothesize that APIT may benefit from targeting more energetically expensive biological mechanisms, specifically by reducing positive instead of negative power at the knee and maintaining much of the isometric function of the plantarflexor muscle fibers during stance (Ishikawa et al., 2005).
Furthermore, while mainly assisting the ankle significant energetic reductions were found at the hip, knee and CoM. As mechanisms that led to this reductions were different, it makes us to believe that humans may alter their gait to maximize their overall energetic benefit. To draw further conclusions on the mechanisms that lead to metabolic reductions, both the joint mechanics and muscle-tendon dynamics must be analyzed. Possible approaches include simulation based on joint kinematics, kinetics and muscle electromyography as done in (Jackson et al., 2017) or experimental setups including ultrasound (Farris and Sawicki, 2012; Ishikawa et al., 2005).
Acknowledgments
This material is based upon the work supported by the Defense Advanced Research Projects Agency (DARPA), the National Science Foundation (Grant No. CNS-1446464), Warrior Web Program (Contract No. W911NF-14-C-0051), the National Science Foundation Graduate Research Fellowship Program (Grant No. DGE1144152), the Samsung Scholarship, the São Paulo Research Foundation (FAPESP; Grant No. 2015/02116–1), and the Robert Bosch Stiftung (Grant No. 32.5.G412.0003.0) and the Center for Research in Human Movement Variability of the University of Nebraska Omaha and the NIH (P20GM109090). This work was also partially funded by the Wyss Institute and the John A. Paulson School of Engineering and Applied Sciences at Harvard University.
Appendix
Marker placement
Markers were placed unilaterally on the first and fifth metatarsals, the medial and lateral sides of the calcaneus, the medial and lateral maleoli, and medial and lateral epicondyles of the femur. Additional markers were placed on the left and right anterior superior iliac spine, the left and right iliac crest, plus the left and right posterior superior iliac spine. To track segment motion, two markers were placed halfway between the iliac crest and anterior superior iliac spine markers on either side, and clusters of four markers were placed on the anterior thigh and lateral shank.
To calculate exosuit ankle plantarflexion moments, at each limb one marker was placed on either end of the exposed Bowden cables near to the ankle. To calculate exosuit hip flexion moments, two markers were placed on each of the left vertical straps.
Footnotes
Publisher's Disclaimer: This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final citable form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
References
- Asbeck AT De Rossi S Holt KG Walsh CJ, 2015. A biologically inspired soft exosuit for walking assistance. The International Journal of Robotics Research 0278364914562476. [Google Scholar]
- Brockway JM, 1987. Derivation of formulae used to calculate energy expenditure in man. Human nutrition. Clinical nutrition 41, 463–471. [PubMed] [Google Scholar]
- Caputo JM Collins SH, 2014. Prosthetic ankle push-off work reduces metabolic rate but not collision work in non-amputee walking. Scientific Reports 4, 7213. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Collins SH Wiggin MB Sawicki GS, 2015. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 522, 212–215. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Donelan JM Kram R Kuo AD, 2002. Simultaneous positive and negative external mechanical work in human walking. Journal of Biomechanics 35, 1, 117–124. [DOI] [PubMed] [Google Scholar]
- Ebbeling CB Clarkson PM, 1989. Exercise-induced muscle damage and adaptation. Sports Medicine 7, 207–234. [DOI] [PubMed] [Google Scholar]
- Farris DJ Sawicki GS, 2011. The mechanics and energetics of human walking and running: a joint level perspective. Journal of The Royal Society Interface rsif20110182. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Farris DJ Sawicki GS, 2012. Human medial gastrocnemius force-velocity behavior shifts with locomotion speed and gait. Proceedings of the National Academy of Sciences 109, 977–982. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Farris DJ Robertson BD Sawicki GS, 2013. Elastic ankle exoskeletons reduce soleus muscle force but not work in human hopping. Journal of Applied Physiology 115, 5, 579–585. [DOI] [PubMed] [Google Scholar]
- Farris DJ Hicks JL Delp SL Sawicki GS, 2014. Musculoskeletal modelling deconstructs the paradoxical effects of elastic ankle exoskeletons on plantar-flexor mechanics and energetics during hopping. Journal of Experimental Biology 217, 22, 4018–4028. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Gordon KE Ferris DP Kuo AD, 2009. Metabolic and mechanical energy costs of reducing vertical center of mass movement during gait. Archives of Physical Medicine and Rehabilitation 90, 136–144. [DOI] [PubMed] [Google Scholar]
- Hanavan JR Ernest P, 1964. A mathematical model of the human body.Aerospace medical research laboratories technical reports 64, 102, 1–149. [PubMed] [Google Scholar]
- Hollander KW Ilg R Sugar TG Herring D, 2006. An efficient robotic tendon for gait assistance. Journal of Biomechanical Engineering 128, 788–791. [DOI] [PubMed] [Google Scholar]
- Ishikawa M Komi PV Grey MJ Lepola V Bruggemann GP, 2005. Muscle-tendon interaction and elastic energy usage in human walking. Journal of Applied Physiology 99, 603–608. [DOI] [PubMed] [Google Scholar]
- Jackson RW Collins SH, 2015. An experimental comparison of the relative benefits of work and torque assistance in ankle exoskeletons. Journal of Applied Physiology 119, 541–557. [DOI] [PubMed] [Google Scholar]
- Jackson RW Dembia CL Delp SL Collins SH, 2017. Muscle-tendon mechanics explain unexpected effects of exoskeleton assistance on metabolic rate during walking. Journal of Experimental Biology 220, 2082–2095. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Koller JR Jacobs DA Ferris DP Remy CD, 2015. Learning to walk with an adaptive gain proportional myoelectric controller for a robotic ankle exoskeleton. Journal of Neuroengineering and Rehabilitation 12, 97. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Koller JR Remy CD Ferris DP, 2018. Biomechanics and energetics of walking in powered ankle exoskeletons using myoelectric control versus mechanically intrinsic control. Journal of Neuroengineering and Rehabilitation 15, 42. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Kwon YH, 1996. Effects of the method of body segment parameter estimation on airborne angular momentum. Journal of Applied Biomechanics 12, 4, 413430. [Google Scholar]
- Lee S Crea S Malcolm P Galiana I Asbeck A Walsh CJ, 2016. Controlling negative and positive power at the ankle with a soft exosuit. IEEE International Conference on Robotics and Automation (ICRA), Stockholm, 3509–3515. [Google Scholar]
- Lewis CL Ferris DP, 2008. Walking with increased ankle pushoff decreases hip muscle moments. Journal of Biomechanics 41, 2082–2089. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Maas S Kok MLJ Westra HG Kemper HCG, 1989. The validity of the use of heart rate in estimating oxygen consumption in static and in combined static/dynamic exercise. Ergonomics 32, 141–148. [DOI] [PubMed] [Google Scholar]
- Malcolm P Derave W Galle S De Clercq D, 2013. A simple exoskeleton that assists plantarflexion can reduce the metabolic cost of human walking. PLOS ONE 8, e56137. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Malcolm P Galle S Van den Berghe P De Clercq D, 2015. Analysis of walking with unilateral exoskeleton assistance compared to bilateral assistance with matched work. Dynamic Walking Conference, Ohio State University, Columbus. [Google Scholar]
- Malcolm P Lee S Crea S Siviy C Saucedo F Galiana I Panizzolo FA Holt KG Walsh CJ, 2017. Varying negative work assistance at the ankle with a soft exosuit during loaded walking. Journal of Neuroengineering and Rehabilitation 14, 62. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Mooney LM Rouse EJ Herr HM, 2014. Autonomous exoskeleton reduces metabolic cost of human walking. Journal of Neuroengineering and Rehabilitation 11, 151. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Mooney LM Herr HM, 2016. Biomechanical walking mechanisms underlying the metabolic reduction caused by an autonomous exoskeleton. Journal of Neuroengineering and Rehabilitation 13, 4. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Ortega JD Farley CT, 2005. Minimizing center of mass vertical movement increases metabolic cost in walking. Journal of Applied Physiology 99, 2099–2107. [DOI] [PubMed] [Google Scholar]
- Panizzolo FA Galiana I Asbeck AT Siviy C Schmidt K Holt KG Walsh CJ, 2016. A biologically-inspired multi-joint soft exosuit that can reduce the energy cost of loaded walking. Journal of Neuroengineering and Rehabilitation 13, 43. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Peter H Westfall RDT Rom D Wolfinger RD Hochberg Y, 2000. Multiple comparisons and multiple tests: using the SAS system. Cary: SAS Institute. [Google Scholar]
- Quinlivan BT Lee S Malcolm P Rossi DM Grimmer M Siviy C Karavas N Wagner D Asbeck A Galiana I Walsh CJ, 2017. Assistance magnitude versus metabolic cost reductions for a tethered multiarticular soft exosuit. Science Robotics 2, eaah4416. [DOI] [PubMed] [Google Scholar]
- Richens B Cleather DJ, 2014. The relationship between the number of repetitions performed at given intensities is different in endurance and strength trained athletes. Biology of Sport 31, 157–161. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Ryschon TW Fowler MD Wysong RE Anthony AR Balaban RS, 1997. Efficiency of human skeletal muscle in vivo: comparison of isometric, concentric, and eccentric muscle action. Journal of Applied Physiology 83, 867–874. [DOI] [PubMed] [Google Scholar]
- Sanchez J Monod H Chabaud F, 1979. Effects of dynamic, static and combined work on heart rate and oxygen consumption. Ergonomics 22, 935–943. [DOI] [PubMed] [Google Scholar]
- Sawicki GS Ferris DP, 2009. Powered ankle exoskeletons reveal the metabolic cost of plantar flexor mechanical work during walking with longer steps at constant step frequency. Journal of Experimental Biology 212, 21–31. [DOI] [PubMed] [Google Scholar]
- Selinger JC OConnor SM Wong JD Donelan JM, 2015. Humans can continuously optimize energetic cost during walking. Current Biology 25, 2452–2456. [DOI] [PubMed] [Google Scholar]
- Seo K Lee J Lee Y Ha T Shim Y, 2016. Fully autonomous hip exoskeleton saves metabolic cost of walking. IEEE International Conference on Robotics and Automation (ICRA), Stockholm, 4628–4635. [DOI] [PubMed] [Google Scholar]
- Umberger BR Martin PE, 2007. Mechanical power and efficiency of level walking with different stride rates. Journal of Experimental Biology 210, 18, 3255–3265. [DOI] [PubMed] [Google Scholar]
- Wiggin B Sawicki GS, 2012. A passive elastic exoskeleton reduces the metabolic cost of walking using controlled energy storage and release. 36th Annual Meeting of American Society of Biomechanics, Gainesville, Florida. [Google Scholar]
- Winter DA, 1987. The biomechanics and motor control of human gait University of Waterloo Press, Ontario. [Google Scholar]
- Zatsiorsky VM 2002. Kinetics of human motion Human Kinetics, Champaign, IL, US. [Google Scholar]
- Zhang J Fiers P Witte KA Jackson RW Poggensee KL Atkeson CG Collins SH, 2017. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 356, 1280–1284. [DOI] [PubMed] [Google Scholar]