

Abstract
Many older adults wish to remain in their own homes as they age [16]. However, challenges in performing home upkeep tasks threaten an older adult’s ability to age in place. Even healthy independently living older adults experience challenges in maintaining their home [13]. Challenges with home tasks can be compensated through technology, such as home robots. However, for home robots to be adopted by older adult users, they must be designed to meet older adults’ needs for assistance and the older users must be amenable to robot assistance for those needs. We conducted a needs assessment to (1) assess older adults’ openness to assistance from robots; and (2) understand older adults’ opinions about using an assistive robot to help around the home. We administered questionnaires and conducted structured group interviews with 21 independently living older adults (ages 65–93). The questionnaire data suggest that older adults prefer robot assistance for cleaning and fetching/organizing tasks overall. However their assistance preferences discriminated between tasks. The interview data provided insight as to why they hold such preferences. Older adults reported benefits of robot assistance (e.g., the robot compensating for limitations, saving them time and effort, completing undesirable tasks, and performing tasks at a high level of performance). Participants also reported concerns such as the robot damaging the environment, being unreliable at or incapable of doing a task, doing tasks the older adult would rather do, or taking up too much space/storage. These data, along with specific comments from participant interviews, provide the basis for preliminary recommendations for designing mobile manipulator robots to support aging in place.
Keywords: Measurement, Design, Experimentation, Human Factors, Aging, Aging in Place, Assistive Robotics, Chores, Design Guidelines, Home, Home Environment, Mobile Manipulation, Needs Assessment, Older Adults, Service Robotics
1. INTRODUCTION
1.1. The Challenges of Aging in Place
Maintaining one’s independence is a primary goal of older adults and a key component to successful aging [1]. Older adults, defined as persons 65 years of age or older [11], encompass a growing segment of the world’s population [27]. One way in which older adults may maintain independence is to age in place. Aging in place has been broadly defined in the literature as the ability for an individual to stay at home as he or she ages [e.g., 16, 20]. The definition of “home” may vary, comprising a variety of home-settings such as houses, apartments, retirement communities, or condominiums. Whatever the setting, the majority (80%) of older adults live independently in their own home, with a small percentage (5%) in a nursing home [18].
A growing area of research is investigating how to support aging in place, and retain or enhance one’s capability to function later in life (i.e., successful aging). With age, there are general changes in cognitive, physical, and perceptual capability: working memory declines, physical strength decreases, and hearing and vision loss occur [15]. Age-related changes pose challenges for older adults to function independently and age in place.
Successful aging may be conceptualized by the selection, optimization and compensation model (SOC model) [2]. This psychological framework posits that successful aging is a process involving three components. Selection refers to development and commitment to personal goals (e.g., maintaining independence, aging in place). Throughout one’s life there are many goals relevant to functioning. However, limited resources reduce the number of goals attainable. Therefore, older adults must either reduce their options by selecting a subset of goals, or develop new attainable goals. Optimization refers to the investment of time and energy to behaviors that support their chosen goals.
Compensation refers to the regulation of loss. That is, the use of compensatory or substitute mechanisms to prevent or balance age-related changes. According to Baltes and Baltes [2], compensation involves aspects of the “mind and technology”. For example, the use of mnemonic strategies (i.e., memory aids) is an example of a psychological compensatory effort. Similarly, the use of technology and devices (e.g., hearing aids, wheelchairs, eyeglasses) are examples of technological compensatory efforts.
The selection, optimization, and compensation efforts of older adults to successfully age in place need to be considered in the context of the person and the environment. Aging in place requires the interaction between older adults and their management of environmental press, that is, the challenges in the environment that older adults need to cope with to maintain their independence. An example of environmental press is the challenge of maintaining one’s home. Home upkeep tasks are a major component to aging in place. Aging in place can be threatened if older adults are experiencing difficulties in home upkeep tasks. This dynamic relationship between older adults and their environment was described in Lawton and Nahemow’s ecological model of aging [21].
According to the ecological model of aging, a person can be characterized by their level of competence. A person’s level of competence is dynamic across the lifespan, with age-related changes in physical, perceptual, cognitive, and social capabilities. Additionally, forces in the environment place physical, cognitive, and social demands on the individual. Lawton and Nahemow [21] stated that ideally an individual’s competency should match the environmental press. If environmental press exceeds individual competence, maladaptive behavior and negative affect may result. To improve independence, persons must be considered within the context of the environment. With regard to aging in place, the environment is the home. The home places dynamic demands on older adults, requiring a variety of home upkeep tasks.
A number of studies have investigated the home maintenance needs of healthy older adults as they age in place. Human factors and needs assessment methodologies have shown that healthy older adults are able to maintain their homes, but not without difficulty. Doing laundry, cleaning, and making the bed were reported as difficult tasks [9, 13]. The data from Rogers and colleagues [24] suggested that 40% of the problems encountered were physical in nature, and 30% were cognitive in nature. Additionally, the previous needs assessment approaches suggested that many solutions to these difficulties include cessation (i.e., not doing the task or outsourcing), perseverance (i.e., still completing task even if it was more difficult or took longer), and compensation (i.e., behavior modification, changing the environment, or using tools or technologies) [14, 24].
As discussed in the SOC model [2], older adults may offset age-related changes and environmental press by using compensatory efforts, such as the use of technology. Robotics is a prospective technological effort that could compensate for environmental press. In particular, home robots have the potential to assist older adults in home upkeep, which is a major component to successfully aging in place, and therefore maintain independence.
1.2. The Potential for Home Robots
A variety of robots, both in development and commercialization, have been designed to assist with or perform home tasks. More are designed to help with physical aspects of housekeeping, ambulation, and social communication; compared to other activities (e.g., money management, grooming, laundry) [25].
It is important that robots are designed to meet older adults’ needs and that older users are amenable to robot assistance. These considerations may increase the likelihood for home robots to be adopted by older adults. Acceptance of home robots may depend on the older adults’ perception of their health status (physical and cognitive), where appreciation for the utility of a home robot increases as the older adults’ health capabilities are at risk of declining [7]. There have been some efforts on developing robots for those with declined health capabilities, such as individuals with motor impairments [8, 19], dementia [28], or needing healthcare assistance [23].
However, it is crucial to also consider those healthy older adults who are independently living. Declines in cognitive, physical, and perceptual capabilities are a normal part of aging. Even independently living older adults encounter difficulty maintaining their home [13]. An effort to develop robots to assist independent older adults has the potential to promote aging in place, and avoid or postpone the need for assisted living or nursing home care.
Indeed, independently living older adults have expressed a willingness to use and accept home robots [12; 26]. More generally, older adults are willing to use home technological assistance, if the perceived benefits of using the technology are clear [22]. Furthermore, Giuliani and colleagues [17] have shown that older adults’ solutions to difficulties they encounter in the home are highly task dependent, with technological assistance a viable solution to some problems (e.g., hearing aids were reported as a solution to hearing difficulties using the telephone). In terms of attitudes toward robot-specific assistance, within the healthcare domain, Broadbent and colleagues [4] have shown that older adults were more positive toward healthcare robots than family or staff. In particular, all participants reported the healthcare robot would be most useful in detecting falls and lifting heavy things.
In a large-scale questionnaire where participants were instructed to imagine a home-based robot, independent older adults indicated an interest in using robots in the home, particularly if the system is performance-directed (i.e., assists with critical infrequent home tasks) [12]. Conversely, Bugman and Copleston [5] conducted a questionnaire that indicated older adults preferred a robot to perform daily housework tasks. However, reasons why older adults held such preferences were not systematically evaluated.
Although the findings from the research outlined above indicate older adult acceptance of robots, their acceptance was task specific. Lacking is older adults’ preferences for robot activities in the home coupled with reasons why they hold such preferences. The development of home robots as a technological compensatory effort requires a more detailed understanding of older adults’ assistance preferences for using a robot for various home upkeep tasks. Research exploring independently living older adults’ needs and preferences for robot assistance can guide developers to design robots more likely to aid older adults’ aging in place. Moreover, robots developed with older adults’ needs and preferences in mind may increase their acceptance.
2. GOAL OF CURRENT RESEARCH
In light of the SOC model [2], robots, as a compensatory technology, have potential to assist older adults to age in place. Successful integration of assistive robots into older adults’ lives will require design of robots that meet their needs. It is not clear what tasks independent older adults would prefer a robot to assist with, the reasons why they hold such preferences, or their perceptions of robot assistance with maintaining their home. This understanding can inform the design of assistive robotics to support these tasks, and thereby aid older adults in aging-in-place. In this research study, we evaluated the potential of home robots to serve as a compensatory technology for older adults. Specifically, our research aimed to:
Assess older adults’ preference for assistance from robots or humans for home upkeep tasks (cleaning tasks, finding and fetching).
Understand older adults’ opinions of using a home robot.
Consider the implications of findings for directing improvement efforts for the design of home assistive robots.
Our needs assessment approach used a combination of questionnaire and structured group interview methodology to provide a rich set of quantitative and qualitative data.
3. METHOD
3.1. Participants
We conducted five structured group interviews, with each group comprised of two to five independently living older adults (N = 21) between the ages of 65 and 93 (M=80.25 years, SD = 7.19). Participants were recruited from local senior centers and retirement homes. The structured group interviews were conducted at the recruitment locations.
We interviewed independently living older adults who reported themselves to be relatively healthy. Most participants lived in an independent residence in senior housing (66.7%) or in a house, apartment, or condominium (28.5%), whereas the remainder lived in a relative’s home (4.8%). To ensure diversity the participants were recruited from two different senior centers, located in areas of metro Atlanta known to differ in socioeconomic status (SES). As such, the participants varied in their educational background (correlated with SES) such that 33.4% had less than formal college education, 38.1% had some college, and 28.5% had at least some post graduate training. Participants were also diverse with respect to race/ethnicity: 57.7% White/Caucasian and 42.9% Black/African American.
To assess participants’ experience with robots, we administered a questionnaire measuring different aspects of robot familiarity as well as the frequency of using 13 different types of robots (e.g., manufacturing robots, entertainment/toy robots, personal robots, surgical robots). Participants reported some familiarity (i.e., heard about or seen robot) with various robots (e.g., surgical robots, manufacturing robots, entertainment/toy robots) but no to very little experience using any robots. Therefore, overall participants were somewhat familiar with, yet inexperienced using robots.
3.2. Personal Robot
The robot depicted in this study was the PR2 (Personal Robot 2), which was developed at Willow Garage, Inc. The PR2 is a commercially available mobile manipulator that is currently used by a number of robotics researchers. This robot has an omni-directional wheeled base with two 8 DOF arms/grippers, a telescoping spine, and a pan-tilt head that carries two stereo camera pairs and a LED texture projector. The PR2 is capable of autonomously navigating around a typical office environment, and manipulate some objects using its grippers.
Participants were introduced to the PR2 by viewing a narrated collage of video clips (see Table 1). The video introduced the robot (see Figure 1) and demonstrated its capabilities. The video clips were adapted, with permission, from Willow Garage’s video library (see http://www.willowgarage.com/blog). The goal of the video was to show the robot’s capabilities; however, we emphasized to the participants that the robot was not limited to what was shown in the video. The video served as a foundation for the older adults’ discussion in the interview by ensuring the participants had similar expectations of the PR2’s capabilities.
Table 1.
Overview of video demonstrating PR2 capabilities.
| Video chapter | Overview of PR2 Video Description of what was shown |
|---|---|
| Introduction | Layperson overview of robot’s physical features (i.e., head, base, arms, grippers) |
| Capabilities | Navigating forward, backward, side to side; pushing a cart; grasping a variety of objects; and telescoping spine |
| Tasks | Opening a door; delivering drinks; delivering medication bottles; folding towels; plugging itself in; playing a game of billiards |
Figure 1.

Video depicting layman descriptions of PR2.
3.3. Questionnaires
Prior to the structured group interview, demographic, health, and technology experience were collected using standardized materials developed by the Center for Research and Education on Aging and Technology Enhancement (CREATE) [10].
We developed an Assistance Preference Checklist to assess how assistance preferences vary (robot vs. human) as a function of task. We asked participants to imagine they needed assistance in everyday life and then indicate their preferences for human or robot assistance with 48 home-based tasks. We instructed participants to assume that the robot could perform the task to the level of a human. Participants rated their preference for assistance for each of the home-based tasks on a five point scale (1=only a human, 3=no preference, 5=only a robot).
3.4. Structured Group Interview Procedure
The interview script was designed following the research methodology outlined by Fisk et al., [15] and included a systematic development of script and questions, materials, selection of the interview environment, recruitment of participants, and training of moderators.
The interview sessions were stratified by gender to create a homogeneous group environment to encourage open discussions. On arrival to the structured group interview, participants provided written informed consent. Participants then completed questionnaires about robot opinions and experience. They were informed that the discussion would be digitally recorded and later transcribed for analysis. The moderator discussed the goals and topic of the structured group interview and rules for the conversation (e.g., not to interrupt other participants). The interview then followed a specific order, starting with the video depicting the PR2 and its capabilities, questions asking about the PR2 specifically, a brainstorm of tasks a robot may perform in the home, and finally a brainstorm of pros/cons to a robot performing specific tasks (i.e., medication management, finding and fetching items, and chores). Upon completion of the structured group interview, the participants completed questionnaires about their opinions about robots, and the Assistance Preference Checklist.
4. RESULTS
4.1. Assistance Preference Checklist Data
In this paper we focus on the data specific to cleaning tasks and fetching/organizing items, which are critical for aging in place. For a more detailed review of robot acceptance, see [25]. Collapsed across all tasks participants did not have a preference for human or robot assistance (M=2.99; SD=0.42). However, when each task was analyzed individually, histograms indicated preferences differed between tasks.
Participants preferred assistance from a robot for 28 of 48 tasks (M > 3.00, where 3.00 = no preference), many of which were related to cleaning. Figure 2 depicts the top five reported cleaning tasks for which older adults indicated a preference for a robot performing (i.e., M=3.50 or higher).
Figure 2.
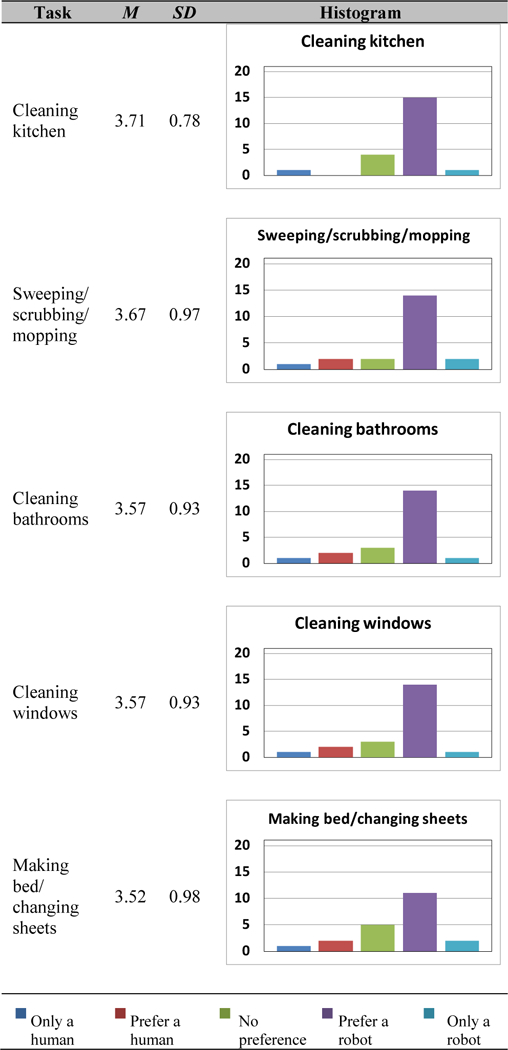
Cleaning Tasks – Prefer Robot.
For many cleaning tasks older adults indicated a preference for robot assistance. However, their preference did discriminate between tasks. For instance, Figure 3 suggests less clear preferences for certain tasks including sorting mail, doing laundry, and washing dishes by hand.
Figure 3.
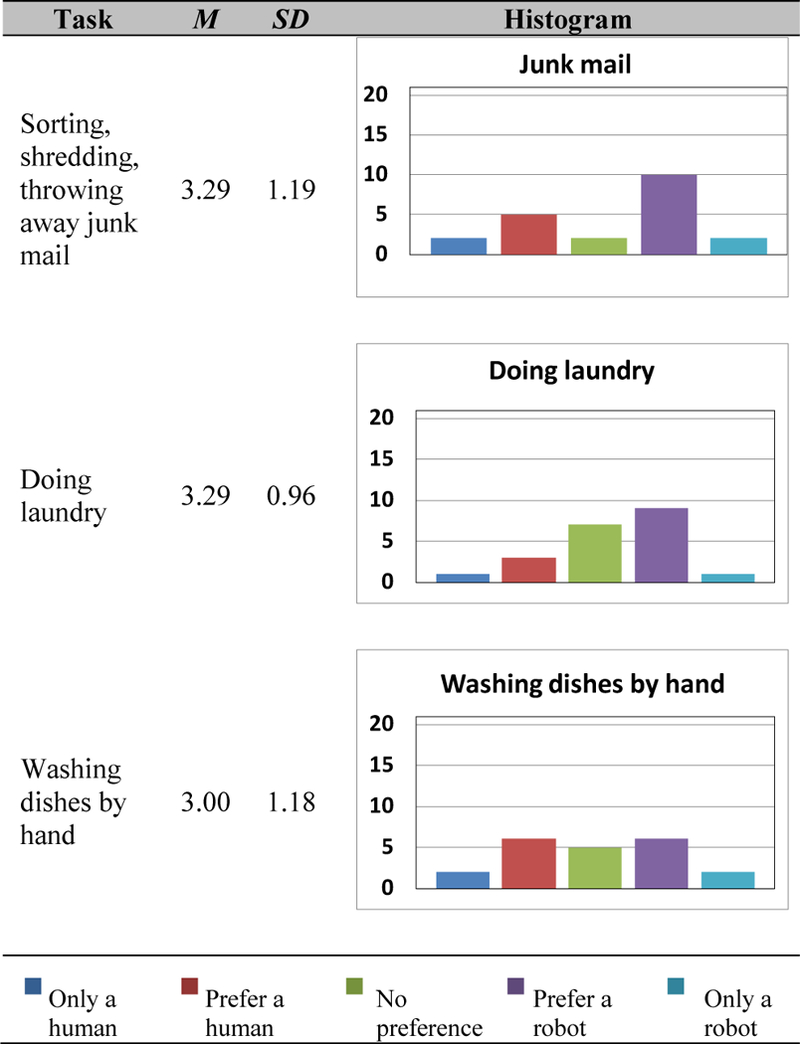
Cleaning Tasks – No Preferences.
The questionnaire contained tasks requiring fetching/organizing objects and included four aspects of manipulating objects: (1) fetching from floor/other rooms, (2) manipulating heavy objects, (3) reaching for objects (i.e., high or low), and (4) finding/delivering objects. As shown in Figure 4, these items indicated a clear preference (M = 3.5 or higher) for a robot to perform the task. In other words, none of the means regarding fetching/organizing home items averaged as “no preference” (M = 3.00) or “preferred to be performed by a human” (M < 3.00).
Figure 4.
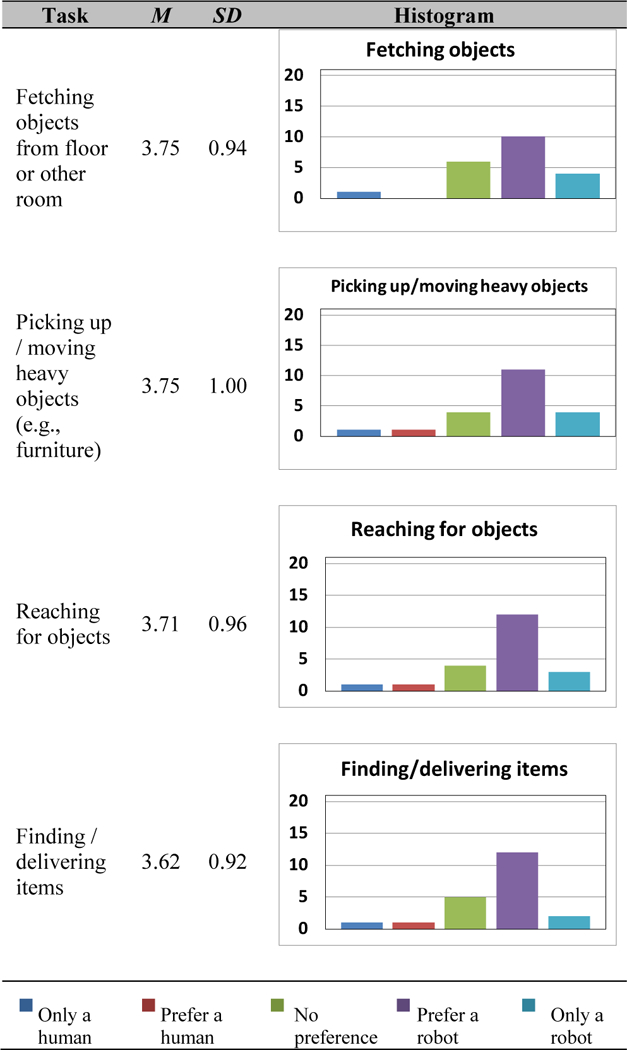
Fetching/Organizing Tasks – Prefer Robot.
Although the Assistance Preference Checklist data above only indicate the types and nature of tasks that participants reported wanting (or not wanting) robot assistance with, the questionnaire does not indicate the reasons for such preferences. To gain insight about (or to provide an understanding as to) why older adults hold certain preferences for a robot’s (particularly the PR2) assistance with home tasks, we analyzed the structured group interview data.
4.2. Structured Group Interview Data
The following analysis focuses primarily on the structured group interview data pertaining to participants’ comments in response to the prompt: “Now we would like you to think about a few specific tasks and discuss the pros and cons to a robot performing them.” Below, we will report data on the tasks of home chores, and fetching and finding.
The structured group interview transcripts were analyzed according to a coding scheme to identify patterns and themes from the discussions. A coding scheme is an organized categorization of the information in the interviews. Each transcript was segmented by a primary researcher. Segments were based on what the participants explicitly stated and were determined as any utterance in which at least one pro or con was mentioned. Those segments were then coded by two independent researchers using qualitative data analysis software, MaxQDA10. Any discrepancies in the coding of the transcripts were addressed through discussion and refinement of the coding scheme by the two coders.
The goal of the coding scheme was to categorize high level pros and cons reported by the older adults. The coding scheme was based on both the literature and the nature of the participant comments. Tables 2 and 3 depict the categories of pros and cons, their definitions, and selected examples of participant quotes depicting each of these categories.
Table 2.
Home Tasks – Pros of Robot.
| Pro | Definition | Example Quotes |
|---|---|---|
| Compensation | Robot does difficult task, or task older adult can no longer perform. | “I lift all of that stuff out of the hamper, it’s quite heavy so it would help with lifting.” |
| “If I find myself putting something away then… I forget where I put it. If the robot was there, I wouldn’t worry about. It could always know where it was…” | ||
| Time Saving | The robot saves the older adult time. | “It will give me more time to go to my next activity (chuckle) which are bountiful.” |
| “Most of the time, I don’t get all those things done on time, so a pro would be, it would enable me to get things done… it would allow you to do more things and do them on time.” | ||
| Delegation of Undesirable Task | The robot performs a task that the older adult wishes not to do (i.e., older adult can still do task, just does not enjoy to do so). | “Do the things…it would be nice to have the robot do the thing that I don’t like to do such as cleaning up” |
|
“I wouldn’t have to get up and get it myself.” | ||
| Effort Saving | The robot saves the older adult energy and reduces workload. | “No, just to do it. It saves time, energy, and I couldn’t do it.” |
|
“You might have more energy. You wouldn’t get tired as quickly.” …”Improve my health . | ||
| Optimization | The robot performs task at a high performance level. | “Robot should be perfect to a task.” |
|
“The robot never gets tired.” | ||
Table 3.
Home Tasks – Cons of Robot.
| Con | Definition | Example Quotes |
|---|---|---|
| Damage to Environment | The robot may break something in the older adults’ home (i.e., home itself or items in home). | “I’m thinking because it is a robot, I’m sure that at times it will break things as we break things. We drop dishes and we break them…” |
|
“I would think one of the cons would be, especially using a PR2… I guess it would have sensors to keep it from rolling over something… it may roll over and damage something…” | ||
| Dependency | The older adults would rather do task themselves or avoid over-relying on the robot. | “Well, con. If it makes you dependent.” |
|
“It’s actually probably good for us to do some of these things physically to keep, to keep moving” | ||
| Mental model | The older adults perception of the robots capabilities is limited (i.e., assume the robot is not capable of doing something). | “I keep thinking of it in terms of how it could help prepare my food but I don’t know whether robots could cook.” |
|
“I can see that if it does laundry, it needs to be able to sort by color. I can see that that would be a con and it couldn’t do it.” | ||
| Reliability of System | The robot either malfunctions or makes mistakes, therefore not performing the task correctly. | “You tell him to bring glasses, he brings you a pair of shoes.” |
|
“And also if there is a malfunction on this robot. Some warning that let you know that something is wrong – a light or something…” | ||
| Storage and Space Limitations | The older adult has concerns about the robots size and/or storing it. | “Storage issues…” “[It] takes some space.” “Well, I can’t imagine having something big that we’d been shown that would help me” |
5. DISCUSSION
5.1. Review of Findings
These results give insight into home upkeep tasks older adults would prefer a robot to assist with, and the reasons why they hold such preferences. In line with the SOC model [2], the data from the Assistance Preference Checklist questionnaire suggested that older adults are accepting of robots as a technological compensatory method. In fact, older adults expressed preference for robot assistance for 28 of 48 tasks. This analysis specifically focused on cleaning tasks and fetching/organizing objects. Many of these tasks were physical in nature (e.g., cleaning kitchen or bathroom, cleaning floors, finding and fetching), supporting previous research suggesting that older adults would benefit from assistance with physical home maintenance tasks [13]. One participant stated, “Well, if you have that arthritis for instance and you find it hard to get up and down in a chair, it [the robot] would fix things and it would certainly help you physically.”
The interviews provided detailed information as to why older adults might prefer robot assistance. For an older adult to accept technology, such as robotics, the benefit has to be clear [6, 12]. Participants discussed the benefits of using a robot, e.g., “I think the robot for me is an amenity that enhances quality of life.” In particular, older adults expressed interest in the robot assisting with difficult tasks, saving time, performing undesirable tasks, reducing effort, and performing tasks at a high performance level.
Tasks where older adults reported having no preference for a robot to perform included sorting mail, doing laundry, and washing dishes. Two of these tasks, laundry and washing dishes, would require the PR2 to come into contact with water. The older adults’ concern with these tasks may be due to their fear of the robot getting wet. That is, throughout the transcripts participants mentioned the robot getting wet as a safety consideration according to their mental model (or knowledge) of the robot.
Further analysis of the structured group interview data indicated that older adults were concerned about becoming dependent on the robot. Malfunctions and limitations in the robot’s capabilities were also discussed. We encouraged the participants to think of capabilities beyond what they viewed in the videos. However, their mental model of the PR2 was limited, and some questioned its capabilities. One said “Well, I’d say Hector [participant’s name for the PR2], go find me the hat I had on yesterday and I mean I don’t know how I’m limited to what it can fetch and find.” Concerns also related to environmental damage (e.g., damaging items in the home) as well as the size/storage of the robot.
5.2. Design Recommendations
This needs assessment serves as a springboard for design guidelines relevant to the development of home assistive robots. The data provide insight into older adults’ perceptions of robot assistance with home upkeep tasks, and thereby can inform the design of assistive robotics to support aging-in-place. By identifying not only the types of tasks older adults want help with, but also their perceived pros and cons to robot assistance, we can develop preliminary recommendations for a variety of design questions. We identified general preliminary recommendations (Table 4) for home robots, regarding the robot’s physical capabilities, attributes, and means of interaction important in the design of assistive robots for the older adult population.
Table 4.
Preliminary Design Recommendations.
| Design Recommendation Parameters | |
|---|---|
| Parameter | Description |
| Customizability | Capability to tailor programs or behaviors to user preferences |
| Interaction / Collaboration | Ability to work as a robot-human team to meet a common goal |
| Manipulation | Level of dexterous manipulation (i.e., fine, gross) |
| Payload | Range of weight of expected objects for the robot to interact with |
| Range of motion | Large kinematic workspace to reach high/low/near/far |
| Storage / size | Physical attributes such as footprint, height, and mass |
The older adult participants seemed to recognize the overall benefit of using a robot to assist them in the home. One participant stated, “It [the robot] would give that person a certain amount of independence in being in more control of their life.” However, some older adults did express concern for depending or over-relying on the robot. An important aspect of aging-in-place is maintaining the older adults’ independence [16].
A design aspect to consider is customizability (sometimes referred to as adaptability; [3]). The older adults discussed some tasks that they wanted performed in a specific manner to meet their individual preferences. For instance, one participant discussed the importance of her laundry to be folded and sorted in a certain way; another discussed his specific preference for meal preparation, “I like certain food cooked in certain way and like some veggie I don’t like them too cooked, too dull…” There was some concern as to whether or not the robot could meet their individual preferences. One way to alleviate this concern is to explore ways in which the user could ‘customize’ the robot. For example, it may be important that the user have the option to teach the robot to perform certain tasks in a specific way, which could be achieved through robot learning.
For those older adults who may be fearful of depending on the robot, a design recommendation may be to facilitate human-robot interaction that encourages collaboration between the robot and human. For instance, the robot could lift heavy pots or pans from a low cabinet, but allow the older adult to cook with them. Or the robot could assist with making the bed (e.g., lifting the mattress, or assisting with the fitted sheet), but allow the older adult to complete the rest of the task. In this way, the older adult is still active and participating, however the robot is compensating the older adult’s limitations by assisting with difficult aspects of the task. More research is needed, however, to understand the type and level of collaborative interaction appropriate for such tasks.
Regarding manipulation of objects, the older adults listed a variety of objects they would like the robot to interact with, including pots, pans, dishes, glasses, remote controls, clothing, and mattresses. Some concern was with regard to the robot’s dexterity to manipulate breakable or fragile objects. The loss of fine motor control is a known age-related change [15]. Assistance with small objects also benefit for older adults. A participant said, “I’m getting slower and for example, I could spend fifteen minutes sometimes trying to latch a piece of jewelry and I’m so exhausted by the time I finish… I don’t want to go out.”
In maintaining one’s home, previous research suggested that older adults experience physical difficulties [14]. Declines in physical strength that occur with normal aging make certain tasks, such as lifting heavy objects, difficult for older adults. Although the participants in this study mentioned a variety of objects for a robot to interact with, the questionnaire and structured group interview data suggested difficulty with heavy objects, such as moving furniture, or lifting a mattress to change linens: “I think making the bed is the most difficult thing for me […] I have a king sized bed and putting that fitted linen on is a job in the house.” Thus a home assistive robot, capable of handing a high payload, would be of particular assistance to older adults.
Regarding the appropriate range of motion a home assistive robot would ideally be capable of, the Assistance Preference Checklist questionnaire suggested that picking up objects from the floor or other room was a task that older adults preferred a robot to perform (M=3.75, SD=0.94). Older adults’ difficulty in bending and stooping has been suggested previously [14]. One participant from the current study stated that a benefit of robot assistance is that it “saves me from hurting my back when I bend down.” Reaching for objects was mentioned, such as high shelves or into cabinets. It is recommended that a home assistive robot have a large kinematic workspace that includes being able to reach the ground, high shelves, and deep into drawers.
Finally, the older adults discussed concerns for storing the robot. One caveat to keep in mind is that this concern may be platform specific. The PR2 is a large robot, with a sizeable footprint (width and depth, 66.8 cm) and is relatively tall (ranges from about 1.3 to 1.67 meters). Many of the older adults interviewed in this study reported that they lived in a condo or apartment home, where storage was limited. When designing robots for the home environment, physical characteristics such as tucking arms, fitting into closets, and a small footprint/base should be considered.
In summary, there is much potential for home robots to support aging-in-place. The older adults we interviewed were quite open to the idea, for certain tasks. Their needs, opinions, and concerns provide guidance for designs that will be useful and acceptable. This study is a first step in better understanding robots for home tasks. The novelty of this work is the coupling of questionnaire data in addition to interview data to understand why they hold certain preferences. We did not want the participants to focus on pragmatic limitations of the current technology. Instead, we encouraged them to focus their discussion on the robot’s potential, which may inform robot design. As such, this study provides useful design recommendations for development of home robots. The next step in this line of research would be to investigate older adults’ opinions of seeing the robot in person, length of engagement, or robot assistance for older adults with impairments.
6. ACKNOWLEDGMENTS
This research was supported in part by a grant from the National Institutes of Health (National Institute on Aging) Grant P01 AG17211 under the auspices of the Center for Research and Education on Aging and Technology Enhancement (CREATE; www.create-center.org). This multidisciplinary effort between the HFA Lab (www.hfaging.org) and the HRL (www.healthcare-robotics.com) was inspired by collaboration with Willow Garage who selected the Georgia Tech as a beta PR2 site for research (www.willowgarage.com). Special thanks to Nachiketas Iyyengar for video development and Jennifer Megan Springman for assistance in data collection and creating experimental materials.
7. REFERENCES
- [1].AARP. (2005, April). Beyond 50.05 survey. Retrieved February 13, 2009, from http://assets.aarp.org/rgcenter/il/beyond_50_05_survey.pdf
- [2].Baltes PB, and Baltes MM 1990. Psychological perspectives on successful aging: The model of selective optimization with compensation In Baltes P and Baltes M (Eds.), Successful aging: Perspectives from the Behavioral Sciences, 1–34. New York: Cambridge University Press. [Google Scholar]
- [3].Broadbent E, Stafford R, and MacDonald B 2009. Acceptance of Healthcare Robots for the Older Population: Review and Future Directions. International Journal of Social Robotics, 1, 4 (2009), 319–330. DOI = 10.1007/s12369-009-0030-6. [DOI] [Google Scholar]
- [4].Broadbent E, Tamagawa R, Patience A, Knock B, Kerse N, Day K, and MacDonald BA 2011. Attitudes towards health-care robots in a retirement village. Australas. J. Ageing. DOI= 10.1111/j.1741-6612.2011.00551.x. [DOI] [PubMed] [Google Scholar]
- [5].Bugmann G, and Copleston S 2011. What Can a Personal Robot Do for You? In Groβ R, Alboul L, Melhuish C, Witkowski M, Prescott T & Penders J (Eds.), Towards Autonomous Robotic Systems, 6856, 360–371. Berlin/Heidelberg: Springer. [Google Scholar]
- [6].Caine KE, Fisk AD and Rogers WA 2007. Designing privacy conscious aware homes for older adults. In Hum. Fac. Erg. Soc. P. (Baltimore, MD, Oct 1–5, 2007). HFES’07. [Google Scholar]
- [7].Cesta A, Cortellessa G, Giuliani MV, Pecora F, Scopelliti M and Tiberio L 2007. Psychological implications of domestic assistive technology for the elderly. PsychNology J, 5, 3. [Google Scholar]
- [8].Choi YS, Deyle T, Chen T, Glass JD and Kemp CC 2009. A List of Household Objects for Robotic Retrieval Prioritized by People with ALS. In Proceedings of International Conference on Rehabilitation Robotics (Kyoto, 23–26 June, 2009). ICRR ‘09. IEEE; DOI = 10.1109/ICORR.2009.5209484. [DOI] [Google Scholar]
- [9].Clark MC, Czaja SJ and Weber RA 1990. Older Adults and Daily Living Task Profiles. Hum. Factors, 32, 5(1990), 537–549. [DOI] [PubMed] [Google Scholar]
- [10].Czaja SJ, Charness N, Fisk AD, Hertzog C, Nair SN, Rogers WA and Sharit J 2006. Factors predicting the use of technology: Findings from the Center for Research and Education on Aging and Technology Enhancement (CREATE). Psychol. Aging, 21 (2006), 333–352. DOI = 10.1037/0882-7974.2L2.333. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [11].Erber JT (2005). Aging and older adulthood. Belmont, CA: Wadsworth. [Google Scholar]
- [12].Ezer N, Fisk AD and Roger WA 2009. More than a servant: Self-reported willingness of younger and older adults to having a robot perform interactive and critical tasks in the home In Hum. Fac. Erg. Soc. P., (San Antonio, TX, Oct 19–23, 2009). HFES’09, 136–150. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [13].Fausset CB, Kelly AJ, Rogers WA and Fisk AD 2011. Challenges to aging in place: Understanding home maintenance difficulties. Journal of Housing for the Elderly, 25, 2 (May 2011), 125–141. DOI= 10.1080/02763893.2011.571105. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [14].Fausset CB, Mayer AK, Rogers WA, and Fisk AD, 2009. Understanding Aging in Place for Older Adults: A Needs Analysis. In Hum. Fac. Erg. Soc. P., (San Antonio, TX, Oct 19-23, 2009). HFES’09, 521–525. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [15].Fisk AD, Rogers W,A, Charness N, Czaja SJ, and Sharit J 2009. Designing for Older Adults: Principles and creative Human Factors Approaches (2ed.). Boca Raton, FL: CRC Press. [Google Scholar]
- [16].Gitlin L 2003. Conducting research on home environments: Lessons learned and new directions. The Gerontologist, 43, 5, 628–637. DOI = 10.1093/geront/43.5.628 [DOI] [PubMed] [Google Scholar]
- [17].Giuliani MV, Scopelliti M, and Fornara F 2005. Elderly People at Home: Technological Help in Everyday Activities. IEEE Workshop on Robots and Human Interactive Communication, (2005), 365–370. [Google Scholar]
- [18].Houser A, Fox-Grage W, and Gibson MJ 2006. Across the States 2006: Profiles of Long-Term Care and Independent Living. From http://assets.aarp.org/rgcenter/health/d18763_2006_ats.pdf. [Google Scholar]
- [19].King C, Chen T, Fan Z, Glass JD, and Kemp CC 2011. Dusty: An assistive mobile manipulator that retrieves dropped objects for people with motor impairments. Disabil. Rehabil., (Oct, 2011). DOI = 10.3109/17483107.2011.615374. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [20].Lawton MP 1990. Aging and performance of home tasks. Hum. Factors, 32, 5 (October 1990), 527–536. [DOI] [PubMed] [Google Scholar]
- [21].Lawton MP, and Nahemow L 1973. Ecology and the Aging Process In Eisdorfer C and Powell Lawton M (eds). The Psychology of Adult Development and Aging, 619–674. Washington D.C: APA. [Google Scholar]
- [22].Melenhorst A-S, Rogers WA, and Bouwhuis DG 2006. Older Adults’ Motivated Choice for Technological Innovation: Evidence for Benefit-Driven Selectivity. Psychol. Aging, 21, 1 (March 2006), 190–195. DOI = 10.1037/0882-7974.21.L190. [DOI] [PubMed] [Google Scholar]
- [23].Pollack ME, Brown L, Colbry D, McCarthy CE, Orosz C, Peintner B, Ramakrishnan S and Tsamardinos I 2002. Autominder: an intelligent cognitive orthotic system for people with memory impairment. Robot. Auton. Syst., 44 (2002), 273–282. DOI = http://dx.doi.org/10.L1.12.4554. [Google Scholar]
- [24].Rogers WA, Meyer B, Walker N, and Fisk AD 1998. Functional limitations to daily living tasks in the aged: A focus group analysis. Hum. Factors, 40, 1 (1998), 111–125. [DOI] [PubMed] [Google Scholar]
- [25].Smarr C-A, Fausset CB, and Rogers WA 2011. Understanding the potential for robot assistance for older adults in the home environment (HFA-TR-1102). Atlanta, GA: Georgia Tech, School of Psychology, Human Factors and Aging Laboratory; http://hdl.handle.net/1853/39670 [Google Scholar]
- [26].Smarr C, Prakash A, Beer J, Mitzner T, Kemp C and Rogers W In prep. Older Adults’ Preferences for and Acceptance of Robot Assistance for ADLs. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [27].U.S. Census Bureau. 2011. International data base. World population by age and sex. From http://www.census.gov/population/international/data/idb/worldpop.php].
- [28].Wada K, Shibata T, Musha T and Kimura S 2008. Robot therapy for elders affected by dementia. Engineering in Medicine and Biology Magazine, 27, 4 (2008), 53–60. DOI = 10.1109/MEMB.2008.919496. [DOI] [Google Scholar]