

ABSTRACT
During walking, uneven surfaces impose new demands for controlling balance and forward progression at each step. It is unknown to what extent walking may be refined given an amount of stride-to-stride unpredictability at the distal level. Here, we explored the effects of an uneven terrain surface on whole-body locomotor dynamics immediately following exposure and after a familiarization period. Eleven young, unimpaired adults walked for 12 min on flat and uneven terrain treadmills. The whole-body center of mass excursion range (COMexc) and peak velocity (COMvel), step length and width were estimated. On first exposure to uneven terrain, we saw significant increases in medial–lateral COMexc and lateral COMvel, and in the variability of COMexc, COMvel and foot placement in both anterior–posterior and medial–lateral directions. Increases in step width and decreases in step length supported the immediate adoption of a cautious, restrictive solution on uneven terrain. After familiarization, step length increased and the variability of anterior–posterior COMvel and step length reduced, while step width and lateral COMvel reduced, alluding to a refinement of movement and a reduction of conservative strategies over time. However, the variability of medial–lateral COMexc and lateral COMvel increased, consistent with the release of previously constrained degrees of freedom. Despite this increase in variability, a strong relationship between step width and medial–lateral center of mass movement was maintained. Our results indicate that movement strategies of unimpaired adults when walking on uneven terrain can evolve over time with longer exposure to the surface.
KEY WORDS: Gait, Biomechanics, Uneven terrain, Motor learning
Summary: The movement strategies of unimpaired adults when walking on uneven terrain change over time with longer exposure to the surface.
INTRODUCTION
The urban environment is rarely completely level; therefore, mobility outside the home presents unpredictability that can challenge locomotion if it is not sufficiently adaptable (Patla and Shumway-Cook, 1999). The multiple joints of the uncompromised musculoskeletal system provide a huge amount of flexibility, and enable gross functional movements, such as a step, to be produced by infinite combinations of trajectories of the individual segments of the body, e.g. shank, thigh, foot (Bernstein, 1967; Fitts, 1964). Balance during walking is dependent on the appropriate orchestration of segments such that the movement of their combined center of mass (COM) is maintained within a functional boundary related to foot position (Hof et al., 2005), regardless of context (Courtine and Schieppati, 2004; Patla and Shumway-Cook, 1999; Patla, 2003).
During walking, segments are loosely organized into patterns that are similar from stride to stride. However, these patterns are never identical even on level ground, reflecting an ability to exploit system redundancy, without which gait would appear robotic (Harbourne and Stergiou, 2009; Harrison and Stergiou, 2015; Stergiou and Decker, 2011; van Emmerik and van Wegen, 2000). Hypothetically, upon a consistent support surface and assuming negligible additional external force on the body, an identically produced step would have an identical result following contact with the ground. Further, the dynamic consequences of the interaction between the body and the ground would be largely predictable, and the surface could be readily exploited to facilitate the task (e.g. Fajen et al., 2009). When the contour of the ground fluctuates, however, a new control problem is presented. The reaction forces experienced by the body via the foot will vary in magnitude and direction from stride to stride, subtly or markedly changing the demands of forward progression and dynamic balance (Patla and Shumway-Cook, 1999; Patla, 2003). Peaks and troughs may act to impair or accelerate the rotation of the leg about the ankle in the direction of walking, inducing delayed or early foot contact in the other limb. Contours that act to invert or evert the foot will encourage medial or lateral movement of the body whilst shifting the boundary and integrity of the base of support provided by the feet (Patla, 2003). A step that is identically produced by an individual cannot physically produce an identical result; to achieve kinematic uniformity from stride to stride would require the adjustment of internally produced forces to counteract the changes in ground reaction force experienced.
Healthy, unimpaired adults are able to walk without loss of balance on unstable and unpredictable surfaces, although they display increases in step length and width variability, and greater and more variable whole-body COM excursions, velocities and accelerations during walking (e.g. Gates et al., 2012; Richardson et al., 2005; Stokes et al., 2017; Thies et al., 2005; Voloshina et al., 2013). As the prevention of loss of balance relies on maintaining the relationship between the base of support and COM movement (Hof et al., 2005; Pai and Patton, 1997), unpredictable dynamics induced by an uneven walking surface may present an increased and ongoing risk of a loss of balance occurring.
Foot placement during unperturbed gait has been shown to be closely attuned to movement of the COM, as estimated from the pelvis or trunk (Arvin et al., 2016, 2018; Roden-Reynolds et al., 2015; Wang and Srinivasan, 2014). Lateral foot positioning, for example, can be predicted from the velocity and position of the pelvis or whole-body COM (Arvin et al., 2018; Wang and Srinivasan, 2014). This coupling appears to hold during isolated and unpredictable lateral perturbations directed at the waist (Hof and Duysens, 2013) and at the foot (Rankin et al., 2014), and empirical evidence points to a neuromechanical control strategy involving the proprioception (Arvin et al., 2016; Roden-Reynolds et al., 2015) and action of the hip abductors (Roden-Reynolds et al., 2015).
In addition to this proposed neuromechanical coupling mechanism (Roden-Reynolds et al., 2015), commonly reported gross deviations in the presence of balance challenges include: decreasing step length to permit a flatter foot contact with the ground (Gates et al., 2012); increasing double support time (Menant et al., 2009), thereby reducing the period when the body is unilaterally supported; increasing knee and hip flexion during swing to avoid tripping (Gates et al., 2012); and increasing step width to increase the boundary within which the COM may safely deviate without risk of a sideways fall (Hak et al., 2013; Rankin et al., 2014). Such strategies would reduce the likelihood of any unpredictable encounter causing excessive divergence of the COM with respect to the base of support, and may be conservative solutions to the unpredictability problem.
List of abbreviations.
- AP
anterior–posterior
- COM
center of mass
- COMexc
whole-body center of mass excursion range
- COMvel
whole-body center of mass peak velocity
- FT
flat terrain
- ML
medial–lateral
- UT
uneven terrain
- UT1
start of uneven terrain trial
- UT2
end of uneven terrain trial
Although these strategies may be effective for maintaining balance, they may not constitute the most functional way of moving through the environment. For example, highly variable trunk and head movement, a lack of movement fluidity, or the requirement for greater attention to be directed towards walking may disrupt the performance of concurrent tasks (Ebersbach et al., 1995), and increases in step width have been shown to increase metabolic cost by over 40% (Donelan et al., 2001). These results suggest that, although adaptations to account for terrain are well within the capability of young adults, they can result in reduced locomotor economy (Voloshina et al., 2013) and can be detrimental to the effectiveness of walking as a means to travel from one place to another. As such, refinement may be beneficial.
Previous studies exploring movement on uneven ground have focused only on isolated bouts of walking (e.g. Gates et al., 2012; Richardson et al., 2005; Thies et al., 2005), primarily via traverses of a section of uneven surface within the laboratory environment. Voloshina et al. (2013) utilized a treadmill with an adapted belt to explore mechanics and energetics on uneven ground, permitting a longer period of continuous walking to be evaluated. However, their study focused only on the final 2.5 min of a 10 min trial. It therefore remains unknown whether people can refine their movement on uneven ground over time. It might be expected that conservative strategies would be employed on uneven ground on first encounter to avoid falls, but adjusted with familiarity to optimize movement based on a greater awareness of the constraints and challenges of the terrain underfoot.
The purpose of this study was to investigate the effect of terrain unevenness on the whole-body locomotor dynamics of unimpaired individuals. Specifically, we examined walking both on first exposure to uneven ground and after a period of familiarization, with a focus on COM movement and foot placement from stride to stride. We hypothesized that on first exposure to an uneven terrain surface we would observe an increase in the amount of variability in step patterns (length and width) and COM dynamics, accompanied by increases in whole-body COM excursion and peak COM velocity on a step-to-step basis. We predicted that unimpaired individuals would adopt a restrictive and cautious solution at first; specifically, a reduction in step length and an increase in step width, to mitigate the risk of a loss of balance when first encountering the surface. We also anticipated that, given their adaptability, individuals would refine their solution with time, leading to a reduction in COM movement, the amount of variability, and these potentially costly or effortful conservative step placement strategies.
MATERIALS AND METHODS
Participants
Eleven young unimpaired adults (age 24.4±2.8 years, mass 78.3±10.1 kg, height 1.79±0.09 m, means±s.d.) were recruited from the staff and student body of the University of Nebraska at Omaha and provided written informed consent to participate. Sample size was based on a power analysis indicating that an effect size of 0.8 could be achieved with 80% power at α=0.05 and 10 participants. The study protocol was approved by the University of Nebraska Medical Center Institutional Review Board. All participants were familiar with treadmill walking or running and reported themselves able to walk for at least 30 min continuously with no perceived fatigue. They had no history of ankle instability, knee ligamentous injury or knee instability; no diagnosed joint laxity or hypermobility; no lower limb osteoarthritis; no current musculoskeletal injury or pain; and no musculoskeletal or neurological disorder. They had not sustained a lower limb injury in the previous 12 months nor had surgery in the previous 6 months. They had no history of cardiovascular events and were not pregnant.
Procedures
A tight athletic suit was worn for motion capture purposes. Participants were tested wearing flexible footwear provided by the laboratory. A 6-degrees-of-freedom full-body marker set based on calibrated anatomical systems technique (Cappozzo et al., 1995) was applied, with motion capture markers affixed to the feet, lower leg, thigh, pelvis, trunk, shoulders, arms, hands and head (see Table S2). Five minutes of walking were completed on a standard flat-belt commercial treadmill (TRM 731, Precor, Woodinville, WA, USA) prior to the start of the captured trials in order to familiarize the participants with the footwear, equipment and environment.
Walking trials were performed on the flat terrain treadmill and on an in-house modified uneven terrain treadmill (Fig. 1). The treadmill belt width and average height were consistent across devices, and participants were asked to focus on a fixation cross mounted at the same height from the belt on the front of each, to maintain visual consistency across walking conditions. A ceiling-mounted harness was worn for all trials for safety.
Fig. 1.

Uneven terrain treadmill. The uneven terrain surface is composed of manually shaped wooden slats affixed to a standard treadmill belt perpendicular to the direction of travel. The repeating pattern has four levels, in increments of 7, 7 and 8 mm from the lowest level (maximum depth of approximately 2.2 cm), selected as sufficiently shallow to enable a heel–toe gait to be maintained. The contours of the pattern were designed such that, unless deliberate targeting is attempted, each step on the surface should result in a slightly different interaction. The pattern is reflected and offset so that the left and right feet should have equal probability of encountering the same contours.
All trials were performed at a fixed speed of 1 m s−1, consistent with previous literature (Voloshina et al., 2013) and determined to be comfortable on the uneven terrain previously in a group of 17 healthy adults. In order to avoid familiarization with the uneven terrain surface during treadmill acceleration at the start of the trial, participants were asked to straddle the walking surface until the belt was at speed, then to step on and immediately remove their hands from the handrails. Participants walked for 12 min on flat terrain followed by 12 min on uneven terrain, with a break of at least 5 min between trials. Kinematic data were captured at 100 Hz using a 17-camera motion capture system (Motion Analysis Corp., Santa Rosa, CA, USA).
Outcome variables
Subsequent variables selected for analysis focused on whole-body measures of gait performance and balance; COM excursion range (COMexc) and peak velocity (COMvel) in the anterior–posterior (AP) and medial–lateral (ML) directions, and step length and step width to represent foot placement in the AP and ML directions, respectively (Fig. 2). Analyses were performed under the assumption that treadmill walking was already a learned skill. Baseline level walking data were extracted from the final 60 strides of the flat terrain trial (FT), at which point participants would have completed 15–16 min of walking in total to enable familiarization to the set treadmill speed, footwear, harness and environment, isolating the effect of the terrain. Values of each variable were calculated from 60 strides on each limb at the start and end of the uneven terrain trial (UT1 and UT2, respectively). This is with the exception of one participant who stumbled briefly due to a toe catch during UT1. For this participant, three strides were excluded bilaterally, with recovery visually determined from video and motion capture data based on trunk and foot movement. In the direction of progression, the average (mean) and variability (standard deviation) of AP COMexc, the anterior COMvel and the step length were calculated for each step and extracted. In the direction perpendicular to the plane of progression, the average (mean) and variability (standard deviation) of ML COMexc, the lateral COMexc (directed towards the stance leg) and the step width were calculated for each step (Fig. 2).
Fig. 2.

Variables. Anterior–posterior (AP) and medial–lateral (ML) center of mass excursion (COMexc) and velocity (COMvel), and step placement.
Processing and data extraction
Kinematic data were tracked in Cortex (Motion Analysis Corp.) with further processing undertaken in Visual3D (C-Motion Inc., Germantown, MD, USA). The full-body 6-degrees-of-freedom model was applied, composed of 15 segments: bilateral feet, shanks, thighs, upper arms, forearms and hands, and head, trunk and pelvis (see Table S3). Segment mass was computed relative to body mass, according to Dempster (1955), and center of gravity locations were estimated based on geometric shape approximations of each segment (cylinder, cone, ellipsoid; Hanavan, 1964; see Tables S1–S6 for a full description of the biomechanical model). Foot mass was adjusted to account for footwear. A 4th-order low-pass Butterworth filter was applied to raw marker data. Cut-off frequencies were determined using power spectral analysis as described by Giakas (2004) and Winter (2009), and ranged from 7 Hz (head) to 12 Hz (feet).
To identify the terrain contour beneath each footfall and ensure that no changes to the task occurred as a result of systematic changes in foot placement across trials, the range and standard deviation of the sagittal and coronal plane midstance foot angles were calculated for each step, defined as the instantaneous angle of the foot with respect to the laboratory coordinate system at the time point at which the contralateral swing foot toe marker (placed dorsal to the second metatarsal head) crossed the stance foot heel marker. The appropriateness of utilizing this toe–heel crossing instance to determine ground contour was verified using video data. Visual inspection confirmed that no participant adopted an early plantarflexion vaulting strategy and indicated that both the posture of the foot and the slope of the ground beneath it could be adequately characterized at this instance.
Variables were computed for both limbs and categorized according to the limb each participant reported they would kick a ball with, designated as their dominant limb. Foot contact events were estimated using a kinematic velocity-based algorithm (Zeni et al., 2008), and the location of foot contact at the start of each gait cycle was approximated by the position of the ankle joint center. Step length was defined as the distance in the treadmill direction of travel between the ipsilateral and previous contralateral foot contact locations plus the distance the treadmill belt traveled within that step duration (Jordan et al., 2007). Step width was defined as the distance perpendicular to the direction of travel between consecutive foot contact locations.
Trial order was not randomized in order to avoid potential carryover effects following walking on the uneven ground.
Statistical analysis
Shapiro–Wilk tests and Q–Q plots were initially used to evaluate normality for each variable. In order to test the hypotheses that (1) there would be an increase in the amount of variability in step patterns and a more restrictive and cautious solution on first exposure to uneven terrain, and that (2) movement would be refined over time, each variable (average and variability of AP COMexc, ML COMexc, anterior COMvel, lateral COMvel, step length and step width, plus sagittal and coronal plane midstance foot angle) was examined using a one-way repeated measures ANOVA (three levels: FT, UT1, UT2). Friedman tests (three levels: FT, UT1, UT2) were used for variables that were not non-normally distributed. Where differences were identified, Tukey's HSD and Wilcoxon signed rank tests were applied, for normally and non-normally distributed variables, respectively.
RESULTS
All participants were able to complete walking trials without the use of the handrails. Only the (self-reported) dominant limb results are given below as similar trends were observed for both limbs.
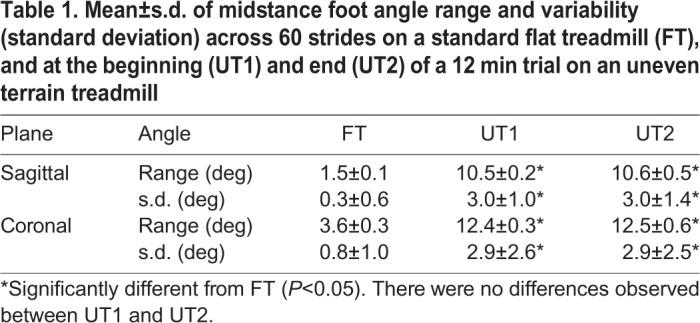
Midstance foot angle range was significantly different across walking bouts in both sagittal (F2,20=133.201, P<0.001) and coronal planes (F2,20=250.983, P<0.001; Table 1). The range was higher in both uneven terrain walking bouts in comparison to flat terrain (all comparisons P<0.01) but there was no significant difference between UT1 and UT2 (P>0.05). Significant differences were observed in the standard deviation of midstance foot angle (sagittal: F2,20=152.926, P<0.001; coronal: F2,20=231.588, P<0.001). Post hoc tests revealed that differences occurred only between FT and UT1, and FT and UT2 (all comparisons P<0.01). The range and standard deviation of foot positions when the foot was loaded, which were 3–7 times greater than those observed during level walking, indicate that the surface of the treadmill used for the study successfully affected distal extremity posture from stride to stride, with the potential to alter level walking patterns (Klint et al., 2008).
Table 1.
Mean±s.d. of midstance foot angle range and variability (standard deviation) across 60 strides on a standard flat treadmill (FT), and at the beginning (UT1) and end (UT2) of a 12 min trial on an uneven terrain treadmill
AP dynamics
Average AP COMexc (F2,20=7.053, P=0.005) and its variability (F2,20=15.374, P<0.001) were significantly different across walking bouts (Fig. 3A). Post hoc tests revealed that average AP COMexc was higher at UT2 in comparison to FT (P<0.01) only. The variability of AP COMexc increased at UT1 (P<0.01) but there was no further change at UT2 (P>0.05).
Fig. 3.

Center of mass (COM) and step dynamics in the anterior-posterior (AP) direction. Average values (mean; left) and variability (s.d.; right) across 60 strides on flat terrain (FT) and uneven terrain, at the beginning (UT1) and end (UT2) of a 12 min walking trial. Circles represent individual subject results; crosses represent the mean value. (A) Per-step COM excursion range (COMexc), (B) per-step peak anterior COM velocity (COMvel) and (C) step length. N=11, *P<0.05, in post hoc Tukey's HSD/Wilcoxon signed rank (for average anterior COMvel only) tests.
Average anterior COMvel did not change across walking bouts (χ22=5.636, P=0.06). Significant differences in the variability of anterior COMvel were observed (F2,20=74.868, P<0.001), with post hoc tests revealing a higher variability at UT1 in comparison to FT (P<0.01; Fig. 3B). This variability reduced at UT2 (P<0.01) but remained higher than that on FT (P<0.01).
Significant differences in average step length (F2,20=21.738, P<0.001) and step length variability (F2,20=26.062, P<0.001) were observed across walking bouts (Fig. 3C). Step length was on average lower at UT1 than on FT (P<0.01), increased at UT2 (P<0.05) but remained shorter on average than on FT (P<0.01). Step length variability was higher at UT1 in comparison to FT (P<0.01). It then reduced at UT2 (P<0.05), although it remained significantly different from that on FT (P<0.01).
ML dynamics
There were significant differences in both average ML COMexc (F2,20=13.673, P<0.001) and the variability of ML COMexc (F2,20=26.589, P<0.001) (Fig. 4A). Post hoc tests revealed a significantly higher average ML COMexc at UT1 and UT2 in comparison to FT (both P<0.01), but not between UT1 and UT2 (P>0.05). The variability of ML COMexc was greater at UT1 than on FT (P<0.01) and increased further at UT2 (FT–UT2 and UT1–UT2 both P<0.01). Differences in both average lateral COMvel and its variability were observed (F2,20=5.529, P=0.012 and F2,20=34.453, P<0.001, respectively; Fig. 4B). Lateral COMvel was on average higher at UT1 than on FT (P<0.01), but was not different from FT at UT2 (P>0.05). The variability of lateral COMvel was higher at UT1 in comparison to FT (P<0.01) and there was a further significant increase at UT2 (P<0.05).
Fig. 4.

Center of mass (COM) and step dynamics in the medial–lateral (ML) direction. Average values (mean; left) and variability (s.d.; right) across 60 strides on flat terrain (FT) and uneven terrain, at the beginning (UT1) and end (UT2) of a 12 min walking trial. Circles represent individual subject results; crosses represent the mean value. (A) Per-step COM excursion range (COMexc), (B) per-step peak lateral COM velocity (COMvel) and (C) step width. N=11, *P<0.05, in post hoc Tukey's HSD tests.
Significant differences in average step width (F1.3,13.3=16.312, P=0.001; Fig. 4C) and step width variability (F2,20=29.805, P<0.001) were observed. Average step width was higher initially on uneven terrain at UT1 (P<0.01) but reduced (P<0.01) such that it was not different from FT at UT2 (P>0.05). Step width variability was higher at UT1 in comparison to FT (P<0.01) and remained high at UT2 (UT1–UT2 P>0.05, FT–UT2 P<0.01).
DISCUSSION
Initial phase of walking on uneven terrain: cautious and variable
Average values for step length and width were comparable to previously reported values for flat and uneven terrain walking (Voloshina et al., 2013). The variability of these parameters was slightly lower in the present study, potentially a result of differences in the treadmill surface. As anticipated, an immediate change in dynamics was observable as participants were first exposed to an uneven surface. Variability in COM excursion range, peak COM velocity and foot placement in the AP and ML directions was higher during the first 60 strides of walking on uneven terrain in comparison to FT. It is likely that some of this variability may be explained by trends inflating the spread of the data over the 60 steps whilst participants became familiar with the surface, e.g. gradual increases in step length.
The changes in foot placement observed at UT1, i.e. increases in step width and decreases in step length, support the immediate adoption of a cautious and restrictive solution, and were as anticipated and consistent with previous literature (e.g. Hak et al., 2013; Voloshina et al., 2013). The hypothesized increases in average COMexc and COMvel on initial exposure to uneven terrain were observed only in the ML direction, but not the AP direction. An orthogonal interplay between AP versus ML control has similarly been observed in previous studies, which was suggested to illustrate the relative prioritization of progression in the direction of locomotion versus balance control (Bauby and Kuo, 2000; Wurdeman et al., 2012). While passive dynamics may effectively manage forward progression during level walking (Bauby and Kuo, 2000; Collins et al., 2005), lateral stability is believed to be under the control of higher centers (O'Connor and Kuo, 2009). In this novel task, a change in the ML direction accompanied by a lack of change in the AP direction, evident despite the uneven support surface, may be a result of active AP restriction as a means to avoid destabilization and to prioritize balance control in the early stages of exposure. The lack of change in AP COMexc and COMvel may also be a secondary effect of the shorter step length, or merely due to the constraint of the fixed treadmill speed. The imposition of a fixed step length across conditions, and repetition of the study on an overground uneven surface or self-paced uneven terrain treadmill could exclude these last two hypotheses.
Change in locomotor patterns on uneven terrain over time: less restrictive but more refined
Changes in whole-body locomotor patterns were observed following a longer period of walking on the same surface in some but not in all variables examined. Further, the changes were not consistent across AP and ML directions. Against expectations, COMexc range and its variability did not reduce at UT2. AP excursion range, in fact, increased at UT2, and the higher variability observed at UT1 was maintained, whereas ML excursion range did not change but its variability increased at UT2. Both of these findings, again, might indicate an initial self-imposed restriction to motion that was released with familiarity with the uneven terrain (Bernstein, 1967; Vereijken et al., 1992). These results are notable given that across the analysis period of UT1 the presence of any increasing or decreasing trend in COMexc would have inflated the standard deviation of the data.
In the AP direction, increases in average step length and reductions in the variability of COMvel and step length allude to an evolution of the dynamics in the direction of progression with time, consistent with a reduction of conservative strategies and a more refined solution. These variables at UT2 remained significantly different to those on FT, however, indicating an enduring effect of the terrain. It remains possible that an increase in the duration of the trial, which permitted only approximately 11 min of exposure prior to analysis in the current study, or inclusion of additional bouts of walking on the uneven surface, would have led to greater refinement.
The elimination of the initial increase in step width and lateral COMvel similarly suggest refinement of the solution in the ML direction. Conversely, a high variability of COM movement and high step width variability have been associated with poorer control of movement and greater fall risk in studies of level walking (e.g. Brach et al., 2005); therefore, the observed increase in lateral variability over time might appear to support a degradation rather than a refinement in movement dynamics. However, an increase in lateral COM variability would arguably not present a risk to balance should an appropriate relationship between COM dynamics and base of support be maintained at each step. In order to further explore these unanticipated increases in variability, a post hoc analysis of the relationship between COM and foot placement in the ML direction was performed. Based on the method of Wang and Srinivasan (2014), models to predict the lateral placement of the (dominant) swing foot based on ML COM state (excursion and velocity) during the preceding midstance were developed [for detailed methods, refer to Wang and Srinivasan (2014), noting that in the present study whole-body COM was employed instead of pelvis, as per Arvin et al. (2018)]. Lateral step placement (analogous to step width in the present study) could be predicted by ML COM dynamics at the preceding midstance by the following equations, each based on 100 strides from each participant, with variables expressed as a deviation from the mean and coefficients averaged across the group:
| (1) |
| (2) |
| (3) |
Greater excursion and velocity towards the swing foot was associated with a more lateral foot placement, and the relationship was maintained on both flat and uneven terrain. R2 values computed from correlations between predicted and measured lateral foot positions revealed that approximately 70% of the variance in step width could be predicted by ML position and velocity at midstance with respect to the stance foot (across the group: FT 72.6±8.1%, UT1 69.6±10.5%, UT2 73.0%±5.9%).
This post hoc analysis indicates that the increased variability of individual variables that was observed in the ML direction is actually effectively controlled and managed by unimpaired individuals through the coupling between COM dynamics and foot placement. As such, the increase in variability of the ML variables may simply be due to a lack of threat once the participant has become familiar with the constraints of the surface and their potential impact on movement. It is possible that the COM and step position variability in the ML direction is a direct consequence of the contours of the terrain that naturally perturb the person in the ML direction. One might speculate that it would be less profitable and more energetically costly to oppose these perturbations and attempt to restrict movement in this plane in the absence of a threat to stability. It is also possible that there is some benefit to an increased variability in this direction as a form of exploratory behavior, enabling the surface to be actively probed from stride to stride (Vereijken et al., 1992).
In an alternative interpretation, the directional changes observed are consistent with optimization theories of motor control (Diedrichsen et al., 2010; Todorov and Jordan, 2002) and the minimum intervention principle (Scott, 2004; Todorov and Jordan, 2002), with the assertion that variability would be expected to be minimized only when it hinders the task goal: walking forwards on a moving belt. Alteration of the task context, by introducing a requirement to stabilize a container of liquid whilst walking, for example, might reveal whether this lateral variability would be reduced should successful performance of the task demand it.
Although these results indicate a refinement of movement, it is unclear whether the adaptations are associated with a greater walking economy. For example, whilst a reduction in step width and in step length variability over time might reduce metabolic cost (see Donelan et al., 2001; Rock et al., 2018), the increase in step width variability could have the opposite effect (O'Connor et al., 2012). Direct measurement of energetics within the same experimental paradigm would provide further insight into this aspect of locomotor performance.
Despite differences in the terrain contour encountered from stride to stride, our findings suggest that individuals adapted their movement as they became familiar with the terrain. This implies that some understanding of the constraints of the surface and potential effects on the forces experienced during walking may be learned over time. Given the inherent periodicity of the pattern, such constraints might include the range of surface heights and the absence of abrupt changes in height. The manipulation of these factors, particularly in an unpredictable manner, may reduce the effectiveness of such refinements to movement and produce a different outcome. Similarly, the use of a treadmill will have introduced speed, step width and step length constraints associated with remaining safely in the center of the treadmill belt, potentially influencing the dynamics and variability of walking patterns on first exposure and after familiarization. Whether the same observations would be made without these constraints warrants testing. A further limitation to the study lies in the lack of inclusion of the first 60 strides of walking on the flat terrain (would be FT1). We performed this analysis under the presumption that treadmill walking was already a learned skill for these participants, and the flat and uneven terrain treadmills were similar, isolating the effect of the terrain. The results observed in the uneven terrain trial are unlikely to be due to familiarization with walking on a moving belt given that participants had walked for over 12 min on flat terrain prior to walking on uneven terrain. However, it is plausible that a similar trend in these measures would have been observed on the flat in addition to the uneven terrain (Owings and Grabiner, 2003; Taylor et al., 1996).
This study investigated the whole-body responses of unimpaired individuals for whom conservative strategies appropriate for this context appear to be readily available. The changes in the terrain were modest, permitting heel strike and foot-flat to be achieved regardless of the contour encountered at each step. The absence of adequate ankle range of motion or the inability to adjust compliance at the foot and ankle, as may be experienced by an orthosis or prosthesis user, would preclude this ability, leading to a greater disruption to walking. Similarly, the lack of ability to appropriately perceive relevant cues regarding changes in COM state could be severely disabling in this context, and necessitate conservative strategies to be continually employed in order to maintain balance. Further investigation of the strength of the relationship between COM dynamics and foot placement at different points in the gait cycle, alongside the inclusion of AP and vertical COM state variables may provide further insight into the time course of step-to-step adjustments given changes in terrain contour in unimpaired and pathological populations. Further, the exploration of rotational dynamics at the joint and segmental level, both in concert and in isolation, will provide additional insight into how these global solutions arise, and the implications of degradation, injury or absence of joints for the ability of an individual to readily negotiate non-level environments.
Conclusions
Our results indicate that the whole-body locomotor dynamics of unimpaired individuals are affected by modest changes in terrain, and that movement solutions can evolve over time with longer exposure to the surface, despite changes in the interactions experienced from stride to stride. In the direction of walking, dynamics appeared to become more refined with time. In contrast, perpendicular to the direction of walking, the changes over time were consistent with a release of degrees of freedom, but one that is effectively managed when observing the system as a whole. Future work will explore the means by which these immediate and longer-term solutions are brought about, and the extent to which success of the task depends on controllable degrees of freedom, with implications for individuals with lower limb pathology or amputation.
Supplementary Material
Acknowledgements
The authors would like to thank Travis Vanderheyden for the development of the uneven terrain treadmill.
Footnotes
Competing interests
The authors declare no competing or financial interests.
Author contributions
Conceptualization: J.A.K., M.M., N.S.; Methodology: J.A.K., J.H.S., K.Z.T.; Validation: J.A.K.; Formal analysis: J.A.K., M.M., K.Z.T.; Investigation: J.A.K., J.H.S.; Writing - original draft: J.A.K.; Writing - review & editing: J.H.S., M.M., K.Z.T., N.S.; Supervision: N.S.; Project administration: J.A.K.
Funding
Grant funding to support this work was received from the National Institutes of Health [NIGMS/P20GM109090 to N.S.; NIGMS/P20GM109090 sub-project #5347 to M.M.; NICHHD/R15HD08682 to N.S.], the National Space and Aeronautics Administration Established Program to Stimulate Competitive Research [80NSSC18M0076 to M.M.], the American Heart Association [18AIREA33960251 to M.M.], the University of Nebraska [Presidential Fellowship to J.K.] and the University of Nebraska Office of Research and Creative Activity [Grant for Research and Creative Activity to J.K.]. Deposited in PMC for release after 12 months.
Supplementary information
Supplementary information available online at http://jeb.biologists.org/lookup/doi/10.1242/jeb.202093.supplemental
References
- Arvin M., van Dieën J. H. and Bruijn S. M. (2016). Effects of constrained trunk movement on frontal plane gait kinematics. J. Biomech. 49, 3085-3089. 10.1016/j.jbiomech.2016.07.015 [DOI] [PubMed] [Google Scholar]
- Arvin M., Hoozemans M. J. M., Pijnappels M., Duysens J., Verschueren S. M. and van Dieën J. (2018). Where to step? Contributions of stance leg muscle spindle afference to planning of mediolateral foot placement for balance control in young and older adults. Front. Physiol. 9, 1134 10.3389/fphys.2018.01134 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bauby C. E. and Kuo A. D. (2000). Active control of lateral balance in human walking. J. Biomech. 33, 1433-1440. 10.1016/S0021-9290(00)00101-9 [DOI] [PubMed] [Google Scholar]
- Bernstein N. A. (1967). The Co-Ordination and Regulation of Movements. Oxford; New York: Pergamon Press. [Google Scholar]
- Brach J. S., Berlin J., VanSwearingen J., Newman A. and Studenski S. (2005). Too much or too little step width variability is associated with a fall history only in older persons who walk at or near normal gait speed. J. Neuroengineering Rehabil. 2, 21 10.1186/1743-0003-2-21 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Cappozzo A., Catani F., Della Croce U. and Leardini A. (1995). Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin. Biomech. 10, 171-178. 10.1016/0268-0033(95)91394-T [DOI] [PubMed] [Google Scholar]
- Collins S., Ruina A., Tedrake R. and Wisse M. (2005). Efficient bipedal robots based on passive-dynamic walkers. Science 307, 1082-1085. 10.1126/science.1107799 [DOI] [PubMed] [Google Scholar]
- Courtine G. and Schieppati M. (2004). Tuning of a basic coordination pattern constructs straight-ahead and curved walking in humans. J. Neurophysiol. 91, 1524-1535. 10.1152/jn.00817.2003 [DOI] [PubMed] [Google Scholar]
- Dempster W. T. (1955). Space requirements of the seated operator; geometrical, kinematic, and mechanical aspects of the body with special reference to the limbs. WADC Technical Report 55, 1-254. 10.21236/AD0087892 [DOI] [Google Scholar]
- Diedrichsen J., Shadmehr R. and Ivry R. B. (2010). The coordination of movement: optimal feedback control and beyond. Trends Cogn. Sci. 14, 31-39. 10.1016/j.tics.2009.11.004 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Donelan J. M., Kram R. and Kuo A. D. (2001). Mechanical and metabolic determinants of the preferred step width in human walking. Proc. Biol. Sci. 268, 1985-1992. 10.1098/rspb.2001.1761 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Ebersbach G., Dimitrijevic M. R. and Poewe W. (1995). Influence of concurrent tasks on gait: a dual-task approach. Percept. Mot. Skills 81, 107-113. 10.2466/pms.1995.81.1.107 [DOI] [PubMed] [Google Scholar]
- Fajen B. R., Riley M. A. and Turvey M. T. (2009). Information, affordances, and the control of action in sport. Int. J. Sport Psychol. 40, 79. [Google Scholar]
- Fitts P. M. (1964). Perceptual-motor skill learning. In Categories of human learning (ed. Melton A. W.), pp. 381-391. New York: Academic Press. [Google Scholar]
- Gates D. H., Wilken J. M., Scott S. J., Sinitski E. H. and Dingwell J. B. (2012). Kinematic strategies for walking across a destabilizing rock surface. Gait Posture 35, 36-42. 10.1016/j.gaitpost.2011.08.001 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Giakas G. (2004). Power spectrum analysis and filtering. In Innovative Analyses of Human Movement (ed. and Stergiou N.), pp. 223-258. Champaign, IL: Human Kinetics. [Google Scholar]
- Hak L., van Dieën J. H., van der Wurff P., Prins M. R., Mert A., Beek P. J. and Houdijk H. (2013). Walking in an unstable environment: strategies used by transtibial amputees to prevent falling during gait. Arch. Phys. Med. Rehabil. 94, 2186-2193. 10.1016/j.apmr.2013.07.020 [DOI] [PubMed] [Google Scholar]
- Hanavan E. P. (1964). A mathematical model of the human body. AMRL. TR. 64, 1-149. 10.1037/e400822004-001 [DOI] [PubMed] [Google Scholar]
- Harbourne R. T. and Stergiou N. (2009). Movement variability and the use of nonlinear tools: principles to guide physical therapist practice. Phys. Ther. 89, 267-282. 10.2522/ptj.20080130 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Harrison S. J. and Stergiou N. (2015). Complex adaptive behavior and dexterous action. Nonlinear Dynamics Psychol. Life. Sci. 19, 345-394. [PMC free article] [PubMed] [Google Scholar]
- Hof A. L. and Duysens J. (2013). Responses of human hip abductor muscles to lateral balance perturbations during walking. Exp. Brain Res. 230, 301-310. 10.1007/s00221-013-3655-5 [DOI] [PubMed] [Google Scholar]
- Hof A. L., Gazendam M. G. J. and Sinke W. E. (2005). The condition for dynamic stability. J. Biomech. 38, 1-8. 10.1016/j.jbiomech.2004.03.025 [DOI] [PubMed] [Google Scholar]
- Jordan K., Challis J. H. and Newell K. M. (2007). Walking speed influences on gait cycle variability. Gait Posture 26, 128-134. 10.1016/j.gaitpost.2006.08.010 [DOI] [PubMed] [Google Scholar]
- Klint R. A., Nielsen J. B., Cole J., Sinkjaer T. and Grey M. J. (2008). Within-step modulation of leg muscle activity by afferent feedback in human walking. J. Physiol. 586, 4643-4648. 10.1113/jphysiol.2008.155002 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Menant J. C., Steele J. R., Menz H. B., Munro B. J. and Lord S. R. (2009). Effects of walking surfaces and footwear on temporo-spatial gait parameters in young and older people. Gait Posture 29, 392-397. 10.1016/j.gaitpost.2008.10.057 [DOI] [PubMed] [Google Scholar]
- O'Connor S. M. and Kuo A. D. (2009). Direction-dependent control of balance during walking and standing. J. Neurophysiol. 102, 1411-1419. 10.1152/jn.00131.2009 [DOI] [PMC free article] [PubMed] [Google Scholar]
- O'Connor S. M., Xu H. Z. and Kuo A. D. (2012). Energetic cost of walking with increased step variability. Gait Posture 36, 102-107. 10.1016/j.gaitpost.2012.01.014 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Owings T. M. and Grabiner M. D. (2003). Measuring step kinematic variability on an instrumented treadmill: how many steps are enough? J. Biomech. 36, 1215-1218. 10.1016/S0021-9290(03)00108-8 [DOI] [PubMed] [Google Scholar]
- Pai Y.-C. and Patton J. (1997). Center of mass velocity-position predictions for balance control. J. Biomech. 30, 347-354. 10.1016/S0021-9290(96)00165-0 [DOI] [PubMed] [Google Scholar]
- Patla A. E. (2003). Strategies for dynamic stability during adaptive human locomotion. IEEE Eng. Med. Biol. Mag. 22, 48-52. 10.1109/MEMB.2003.1195695 [DOI] [PubMed] [Google Scholar]
- Patla A. E. and Shumway-Cook A. (1999). Dimensions of mobility: defining the complexity and difficulty associated with community mobility. J. Aging Phys. Act. 7, 7-19. 10.1123/japa.7.1.7 [DOI] [Google Scholar]
- Rankin B. L., Buffo S. K. and Dean J. C. (2014). A neuromechanical strategy for mediolateral foot placement in walking humans. J. Neurophysiol. 112, 374-383. 10.1152/jn.00138.2014 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Richardson J. K., Thies S. B., DeMott T. K. and Ashton-Miller J. A. (2005). Gait analysis in a challenging environment differentiates between fallers and nonfallers among older patients with peripheral neuropathy. Arch. Phys. Med. Rehabil. 86, 1539-1544. 10.1016/j.apmr.2004.12.032 [DOI] [PubMed] [Google Scholar]
- Rock C. G., Marmelat V., Yentes J. M., Siu K. C. and Takahashi K. Z. (2018). Interaction between step-to-step variability and metabolic cost of transport during human walking. J. Exp. Biol. 221, jeb181834 10.1242/jeb.181834 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Roden-Reynolds D. C., Walker M. H., Wasserman C. R. and Dean J. C. (2015). Hip proprioceptive feedback influences the control of mediolateral stability during human walking. J. Neurophysiol. 114, 2220-2229. 10.1152/jn.00551.2015 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Scott S. H. (2004). Optimal feedback control and the neural basis of volitional motor control. Nat. Rev. Neurosci. 5, 532-546. 10.1038/nrn1427 [DOI] [PubMed] [Google Scholar]
- Stergiou N. and Decker L. M. (2011). Human movement variability, nonlinear dynamics, and pathology: is there a connection? Hum. Mov. Sci. 30, 869-888. 10.1016/j.humov.2011.06.002 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Stokes H. E., Thompson J. D. and Franz J. R. (2017). The neuromuscular origins of kinematic variability during perturbed walking. Sci. Rep. 7, 808 10.1038/s41598-017-00942-x [DOI] [PMC free article] [PubMed] [Google Scholar]
- Taylor N. F., Evans O. M. and Goldie P. A. (1996). Angular movements of the lumbar spine and pelvis can be reliably measured after 4 minutes of treadmill walking. Clin. Biomech. 11, 484-486. 10.1016/S0268-0033(96)00036-8 [DOI] [PubMed] [Google Scholar]
- Thies S. B., Richardson J. K. and Ashton-Miller J. A. (2005). Effects of surface irregularity and lighting on step variability during gait: A study in healthy young and older women. Gait Posture 22, 26-31. 10.1016/j.gaitpost.2004.06.004 [DOI] [PubMed] [Google Scholar]
- Todorov E. and Jordan M. I. (2002). Optimal feedback control as a theory of motor coordination. Nat. Neurosci. 5, 1226-1235. 10.1038/nn963 [DOI] [PubMed] [Google Scholar]
- van Emmerik R. E. A. and van Wegen E. E. H. (2000). On variability and stability in human movement. J. Appl. Biomech. 16, 394-406. 10.1123/jab.16.4.394 [DOI] [Google Scholar]
- Vereijken B., Emmerik R. E. V., Whiting H. T. A. and Newell K. M. (1992). Free (z) ing degrees of freedom in skill acquisition. J. Mot. Behav. 24, 133-142. 10.1080/00222895.1992.9941608 [DOI] [Google Scholar]
- Voloshina A. S., Kuo A. D., Daley M. A. and Ferris D. P. (2013). Biomechanics and energetics of walking on uneven terrain. J. Exp. Biol. 216, 3963-3970. 10.1242/jeb.081711 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Wang Y. and Srinivasan M. (2014). Stepping in the direction of the fall: the next foot placement can be predicted from current upper body state in steady-state walking. Biol. Lett. 10, 20140405 10.1098/rsbl.2014.0405 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Winter D. A. (2009). Biomechanics and Motor Control of Human Movement. John Wiley & Sons. [Google Scholar]
- Wurdeman S. R., Huben N. B. and Stergiou N. (2012). Variability of gait is dependent on direction of progression: Implications for active control. J. Biomech. 45, 653-659. 10.1016/j.jbiomech.2011.12.014 [DOI] [PubMed] [Google Scholar]
- Zeni J. A., Richards J. G. and Higginson J. S. (2008). Two simple methods for determining gait events during treadmill and overground walking using kinematic data. Gait Posture 27, 710-714. 10.1016/j.gaitpost.2007.07.007 [DOI] [PMC free article] [PubMed] [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.