

Abstract
Monitoring the upper arm propulsion is a crucial task for swimmer performance. The swimmer indeed can produce displacement of the body by modulating the upper limb kinematics. The present study proposes an approach for automatically recognize all stroke phases through three-dimensional (3D) wrist’s trajectory estimated using inertial devices. Inertial data of 14 national-level male swimmer were collected while they performed 25 m front-crawl trial at intensity range from 75% to 100% of their 25 m maximal velocity. The 3D coordinates of the wrist were computed using the inertial sensors orientation and considering the kinematic chain of the upper arm biomechanical model. An algorithm that automatically estimates the duration of entry, pull, push, and recovery phases result from the 3D wrist’s trajectory was tested using the bi-dimensional (2D) video-based systems as temporal reference system. A very large correlation (r = 0.87), low bias (0.8%), and reasonable Root Mean Square error (2.9%) for the stroke phases duration were observed using inertial devices versus 2D video-based system methods. The 95% limits of agreement (LoA) for each stroke phase duration were always lower than 7.7% of cycle duration. The mean values of entry, pull, push and recovery phases duration in percentage of the complete cycle detected using 3D wrist’s trajectory using inertial devices were 34.7 (± 6.8)%, 22.4 (± 5.8)%, 14.2 (± 4.4)%, 28.4 (± 4.5)%. The swimmer’s velocity and arm coordination model do not affect the performance of the algorithm in stroke phases detection. The 3D wrist trajectory can be used for an accurate and complete identification of the stroke phases in front crawl using inertial sensors. Results indicated the inertial sensor device technology as a viable option for swimming arm-stroke phase assessment.
Key points.
Inertial sensors technology is a viable option for swimming arm-stroke phase assessment
Similar but shifted wrist 3D trajectory were observed between inertial and video analysis
Inertial technology for wrist trajectory is independent from video analysis
The identification of the entry arm-stroke phase could be performed using the wrist trajectory computed through IMMUs
Key words: Swimming propulsion, hand kinematic, underwater, swimming technique, inertial sensor
Introduction
The upper body actions in front crawl produce the major contribution to forward displacement (Gatta et al., 2012). More specifically, the arm-stroke technique is a key factor for the improvement of swimmer performance using the hand as thrust (Rouboa et al. 2006). Indeed, the arm-stroke cycle in front crawl is typically segmented into four phases (entry; pull; push; recovery) using the hand position relative to the swimmer’s body or to the water surface as identification of the distinct phases (Chollet et al., 2000; Keskinen and Komi, 1993). The duration of the different arm-stroke phases varies from one swimmer to another and many investigations showed that swimmers adjust the time spent in each of the stroke phases to achieve performance objectives (Keskinen and Komi, 1993). In particular, the entry phase duration has the larger variation among the stroke phases due to the swimmer specialization (McCabe et al., 2011). Moreover, the thrust performance of the swimmer also depends on the timing between the actions of the hands, namely inter-limb coordination. The arm-stroke phases identification also allows to characterize the coordination model of the swimmer: Chollet et al. (2000) assessed inter-arm coordination in front crawl, using an index of coordination (IdC) which quantifies the time gap between two propulsive arm actions.
The three-dimensional (3D) video-based is the most used technique for both motion analysis of the swimmer’s hand (Cesaracciu et al., 2011; Samson et al., 2015a) and stroke phases detections (Psycharakis and Sanders, 2010). Despite the reliability and validity, this method presents some limitations that force the coach to prefer the most accessible 2D video-analysis (Mooney et al., 2016): the costs of the cameras are expensive; the automatic process of data acquisition is very complex (Ceccon et al., 2013); data processing requires long time procedure, limiting the direct feedback and the swimmer’s learning (Magalhaes et al, 2015); the water environment negatively affects the signal accuracy (Cortesi et al., 2014; Gourgoulis et al., 2008). To overcome the limitations of video-based motion analysis in sport, modern wearable technologies have introduced an alternative approach based on inertial and magnetic measurement units (IMMUs). IMMUs have small size, transmit data wireless, perform short-time analysis, do not require complex calibrations and can be worn easily. The IMMUs can analyze and monitor the whole swimming trial continuously without specified spatial limitation, a typical feature of the video analysis. The specificity of water leads to a spontaneous emergence of movements to satisfy the surrounding constraints that concurrently create positive (propulsion) and negative (drag) effects on the performance. The continuous manipulation of these constraints could lead new functional adaptations of swimming and the variability of the movements could be useful for the performance through circular relationships between perception and action (Guignard et al., 2017). Thus, IMMUs may allow to collect additional information on the variability of swimmer’s coordination dynamics and on the swimmers’ adaptability to surrounding constraints. For these reasons, in the last ten years some research groups have directed the scientific interest on the biomechanical analysis of the swimmer using IMMUs (Guignard et al., 2017, Camomilla et al., 2018). Considering the detection of the stroke phases through IMMUs, Dadashi et al. (2013) and Callaway (2015) proposed two algorithms based on the angular velocity of the forearm and on the body roll position, respectively. Despite their validity reported by comparison against a gold standard video-based system, the angular velocity method could be critical for the stroke phase detection. The entry start event was indeed identified and described in conjunction with video analysis. Moreover, additional swimming stroke configurations like different velocities or expertise of participants should be explored using the angular velocity method. According to Chollet et al. (2000), the detection of the starting events for each stroke phase could be identified by the hand spatial position. Therefore, the 3D underwater motion analysis using IMMUs technology based on spatial position could increase and complete the amount of information available for the swimmer stroke analysis, especially in terms of intra-cyclic stroke variability and stroke-by-stoke variability.
As the literature suggests, we hypothesized that the hand position could lead to more accurate stroke phases detection in swimming and consider specific swimmer technique. Considering the accuracy of the wrist joint angles estimated using IMMUs and the encumbrance of a sensor on the hand (Fantozzi et al., 2016), the mid-point between radial and ulna styloids can be considered the closest point to the hand estimated with sufficient reliability and with a minimal burden for the swimmer. Since the decisive improvement offered by the IMMUs is to assess the swimming motion continuously, the aim of the present study is to propose and to validate a novel approach for automatic stroke phase detection based on 3D wrist trajectory in front crawl swimming using IMMUs.
Methods
Participants and design
The experimental protocol was divided into two phases: i) the validation of the 3D wrist trajectory estimation in front-crawl swimming simulated on land using multiples IMMUs and ii) the validation of stroke phases temporal estimation through 3D wrist trajectory in front-crawl swimming in aquatic environment. The validation was performed using video analyses as gold standard: 3D spatial reconstruction and temporal events were considered in phase A and B, respectively.
Fourteen national-level male swimmers participated in the study (23.2 ± 2.8 years of age; 76.7 ± 7.6 kg of body mass; 1.81 ± 0.07 m of stature); at the time the experiments were performed, the weekly training duration of the swimmers was 15 ± 3 h per week. Short-course 25 m personal front-crawl best times were 11.3 ± 0.2 s. All fourteen participants took part to the stroke phase detection validation in swimming, while only five completed the 3D swimming wrist trajectory validation in simulated swimming.
The project was approved by the local University Ethics committee and conducted according to the ethical standards of the Declaration of Helsinki. All participants provided written informed consent to participate in the study.
3D wrist trajectory validation in simulated swimming
Each of the five swimmers involved performed a 20 seconds trial of front-crawl simulated swimming with a stroke rate like swimming motion (between 30 to 60 cycles/min). The swimmers were asked, lying on a swim bench, to swim as they would have done in a swimming pool. 150 complete front crawl arm-stroke cycles were collected corresponding to the right and left strokes of the five swimmers involved.
Data collection was performed using an IMMUs system (APDM Opals, 5 units, including tri-axial accelerometers (±6 g), tri-axial gyroscopes (± 2000°/s) and tri-axial magnetometers (±6 gauss) each, weight <25g (with battery), 128 Hz, internal storage 8Gb) together with a stereophotogrammetric system (BTS SMART-DX 7000, 7 cameras, 250 Hz) resampled at 128 Hz. Data acquired with both systems were filtered and an isolated explosive flexion/extension of the elbow carried out before each trial was performed for time synchronization between the two methods. The zero-crossing acceleration of the sensors/markers on the wrist was used as the synchronization frame. To compare kinematic data estimated, 5 clusters (four 10-mm markers and one IMMU attached onto a rigid light-weighted wooden plate) were built and firmly fixed onto the swimmer body segments. Anatomical system calibrations (Cappozzo et al., 1995) for humerus epicondyles and forearm styloids of both limbs were performed, while additional markers were placed directly on the thorax anatomical landmarks (incisura jugularis, xiphoid process, seventh cervical vertebrae, and eighth thoracic vertebrae). The gleno-humeral position with respect to the thorax anatomical reference system (Cutti et al., 2008) was computed using the regression equation described by Murray (1999).
The 3D coordinates of the wrist were computed considering the kinematic chain of three rigid body segments of the upper limb (thorax, upper-arm, forearm, not including the hand). Body segments orientation was estimated applying a protocol adapted and validated for swimming (Cutti et al., 2008; Fantozzi et al., 2016). Body segments length was calculated considering the anatomical landmarks positions measured in the static calibration trial: incisura jugularis and gleno-humeral position for the thorax, gleno-humeral position and mid-point between the humerus epicondyles for the upper-arm, and mid-point between the humerus epicondyles and mid-point between the styloids for the forearm. Thus, a rigid body roto-translation was applied recursively from the thorax to the wrist.
Three different wrist trajectories were computed through: 1) 3D marker-based stereophotogrammetry system (MBS) considered as the gold standard; 2) stereophotogrammetric data applying the kinematic chain model (KMS); and 3) IMMUs data applying the same model (3DIMMU). Specifically, IMMUs data were obtained processing raw accelerometers, gyroscopes and magnetometers data with Madgwick algorithm to obtain the 3D IMMUs orientation and applying the kinematic chain model described above (Fantozzi et al., 2016). The wrist trajectories were computed in the thorax anatomical reference system (Z axis was pointing caudally, X axis pointing to the left of the participant, and Y axis pointing cranially forwards in the swimming direction).
Stroke phase detection validation in swimming
Fourteen participants performed 25 m front-crawl trial in a 25 m indoor swimming pool: eight of them at the intensity of 75% of their maximal velocity (V75%), and six of them at the 100% (V100%). Overall, 146 swim strokes were available after data collection that arise to the right strokes and left strokes of the fourteen swimmers involved (mean of 5 ± 1 swim strokes per swimmer). Since the first and the last stroke cycles of each trial are usually conditioned by the start and finish patterns, they were excluded in the following analysis. Before the second session, the swimmers completed a 20-minute warm-up period and performed an all-out 25 m front-crawl trial wearing IMMUs to become familiar with the test and to measure the maximal velocity. With the aim to measure the split time, the all-out 25 m were videotaped with a camera (GoPro Hero 4, California, USA) recording at 50Hz and full HD resolution (1920 x 1080 pixel) by an operator that followed the swimmer throughout the entire trial along the side of the pool. The maximal velocity was obtained from the distance and the 25-m split times. The swimmer was instructed to perform an in-water start and to have a free choice of underwater phase length. Five IMMUs were first calibrated, then inserted in round plastic waterproofed boxes, and finally fixed to the swimmer body segments (thorax, upper-arms, and fore-arms, Figure 1) by means of adhesive tape/spray and elastic bands.
Figure 1.
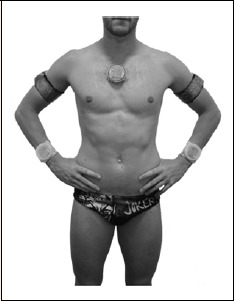
IMMUs positioning used for the validation of stroke phases temporal estimation in water are shown.
The same arm-stroke phases classification of Chollet et al. (2000) adopted in previous research with IMMUs (Dadashi et al., 2013) and detailed in Figure 2 was used. The duration of the propulsive phase is the sum of pull and push phases, whereas the duration of the non-propulsive phase is the sum of entry and catch phase and recovery phase.
Figure 2.
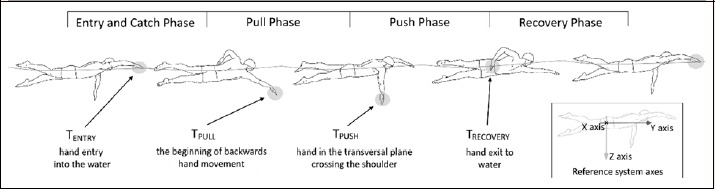
Arm stroke phases in front-crawl (classification proposed by Chollet et al., 2000) and graphical presentation of reference system axes.
The duration of each phase was expressed as a percentage of the complete stroke cycle duration. Arm coordination was quantified using the IdC of Chollet et al. (2000). The IdC was calculated as the average time lag between tPULL in the first right arm stroke and tRECOVERY of the first left arm stroke, and between the tPULL in the second left arm stroke and tRECOVERY in the first right arm stroke. When a lag time occurred between the propulsive phases of the two arms, the stroke coordination was called ‘catch-up’ (IdC <0%). When the propulsive phase of one arm started when that of the other arm ended, the coordination was called ‘opposition’ (IdC = 0%). When the propulsive phases of the two arms overlapped, the coordination was called ‘superposition’ (IdC >0%). The average index of coordination was calculated by the wrist instants detected through 3DIMMU algorithm for all the swim strokes available and expressed as a percentage of the mean duration of the stroke. Four randomized participants were included in the IdC calculations for each velocity.
To automatically recognize the front-crawl stroke phases through 3DIMMU, an algorithm for the detection of the previously defined arm stroke phases events (tENTRY, tPULL, tPUSH and tRECOVERY) was developed. As first step, the algorithm computes the wrist exit instants, tRECOVERY, applying the method described in Dadashi et al. (2013) as the maximal of θFS(t), the angle between the forearm and sacrum anterior-posterior axes, computed from the orientation of the IMMUs positioned on the respective body segments. For the identification of tENTRY, tPULL and tPUSH, the 3D wrist coordinates were preliminary 5 Hz low-pass filtered using a zero phase shift, 2nd order Butterworth digital filter. Between each couple of consecutives tRECOVERY, i.e. tRECOVERY(i) and tRECOVERY(i+1), the maximum values of the wrist y-coordinate and of its 1st order derivative, namely y-linear velocity, were found. Starting from the maximum y-velocity toward the maximum y-coordinate instant, the tENTRY was identified as the first frame where wrist y-velocity was lower than a threshold (60 cm/s), which meant that the wrist was slowing down. Thus, tENTRY corresponded to the instant where the wrist completed the backward/forward deceleration during the recovery phase. After tENTRY, the wrist reaches the maximum y coordinate and then it starts the pull phase through an acceleration in backward direction. Therefore, the tPULL was identified as the first frame where the wrist y-velocity was lower than a threshold (-50 cm/s), starting from the maximum toward the tRECOVERY(i+1), which meant that the wrist was accelerating in backward direction. Finally, the push phase started where the wrist entered to the transversal plane crossing the shoulders that corresponds to the maximum wrist depth in water (Riewald and Rodeo, 2015). Then, tPUSH was identified as the frame between tPULL and tRECOVERY(i+1), where the wrist z-coordinate reached the minimum value. The two thresholds were calculated by minimizing the RMSE of the Entry and Catch, Pull, Push and Recovery percentage obtained comparing IMMU and the gold standard (TLC). As first phase, the threshold values were varied with a step of 20 cm/s between -80cm/s and 80cm/s. Once the value with lower RMSE was selected, it was varied with a step of 2cm/s in a range of ± 10 cm/s. The value with lower RMSE was selected as the threshold value. The two threshold values (60 cm/s for tEntry and -50 cm/s for tPULL) were selected considering trials performed with both 75% and 100% of intensity. In Figure 3 an example of the 3D wrist coordinates during front-crawl swimming with all the detected start events of arm-stroke phases is shown.
Figure 3.
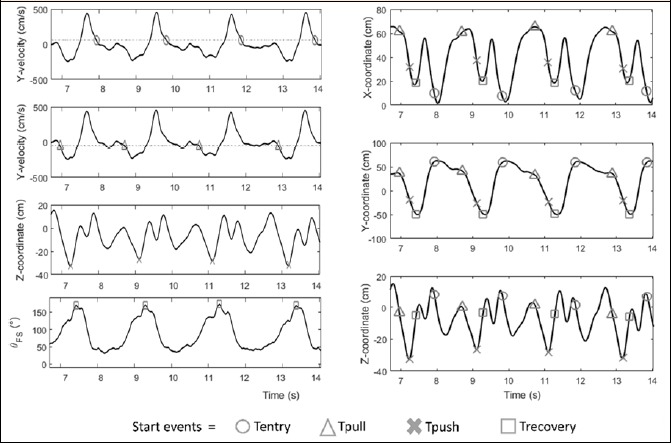
A typical result of arm-stroke phase detection based on the proposed algorithm is illustrated.
In order to evaluate the error induced by measurement of the body segments, we performed a sensitivity analysis varying of ± 1.5 and ± 3 cm the length of upper-arm and forearm for one participant during real swimming (Stagni et al., 2006). For each combination of the modified length, we have computed the RMSE of the entry and catch, pull, push and recovery percentage obtained from the comparison with the real body segment lengths.
To compare and validate the duration of the front-crawl stroke phases with a gold standard (TLC), three underwater cameras (GoPro Hero 4, California, USA) recording at 50Hz and full HD resolution (1920 x 1080 pixel), were placed perpendicular to the swimmer’s direction on a sagittal view at 0.70 m under the water surface. More specifically, to record the swimmers between the 8th and 23th meter after the start the 3 cameras were placed each one at a distance of 5 m. An underwater LED lights tube visible by all the cameras was used to synchronize the system. For data synchronization, the first frame when the LEDs were switched on was used to determine the zero time of the video recordings. A rapid bump hit with a finger on the sensor and recorded by the camera was used to synchronize the video analysis with IMMUs. No spatial calibration was performed since it was not required for a temporal analysis. The arm-stroke phase events were detected using the motion analysis software Kinovea (Charmant & Contrib., France) by 2 expert operators (more than 50 hours of experience) to ensure a reliable technique. To evaluate the repeatability of the measure, the first operator repeated the video-analysis five times (intra-operator variability) and the second one was asked to perform the same video-analysis (inter-operator variability). Repeatability test to compute the stability of the stroke phases detection using video analysis showed nearly perfect ICC values of 0.91 and 0.93 for inter-operator variability and intra-operator variability, respectively. Repeatability tests showed high agreement for different operators and between the same operator.
Statistical analysis
As first, the normality distribution of residuals and the homogeneity of variances have been confirmed using Shapiro-Wilk and Levene tests respectively.
In order to quantify the true positive rate and the true negative rate in the detection of stoke cycle, sensitivity and specificity were computed comparing 3DIMMU with gold standard.
Regarding to the 3D wrist trajectory, the precision and accuracy of 3DIMMU algorithm in comparison to MBS and KMS methods were determined by the correlation analyses for the x, y, z components of the wrist trajectories. RMSE, 90% percentile of absolute error, 3D mean distance and normalized Pairwise Variability Index (nPVI, Sandnes and Jian, 2004) were used to analyze the average difference between the signals. Agreement of 3DIMMU trajectories with MBS and KMS trajectories was also calculated applying Bland–Altman analysis, showing the mean of the differences of measurements.
Regarding the stroke phases detection, one-way ANOVA for each stroke phase was employed to compare the absolute error between 3DIMMU and TLC methods, across the two velocity groups (75% and 100% of their personal best time). The precision and accuracy of our algorithms in comparison with the 2D video-based analysis, were determined by the correlation analyses, Bland-Altman plots and RMSE. Repeatability for stroke phases detection algorithm was expressed by the interclass correlation coefficient (ICC) across the stroke cycles of each participant. The ICC was also used to compute the stability of the stroke phases detection using video analysis (inter- and intra-operator variability). The correlation magnitude was assessed using the usual scale (0.1, 0.3, 0.5, 0.7 and 0.9 for low, moderate, high, very high and nearly perfect, respectively) proposed by Hopkins et al. (2009). Following the suggestions of McGinley et al. regarding the acceptable limits of reliability for all possible clinical applications of optokinetic devices analysing 3D kinematic gait, the angular error of 2° or less was considered to be good reproducibility and angular differences between 2° and 5° considered reasonable reproducibility.
All statistical tests were performed using the software SPSS version 20.0 (SPSS, Chicago, IL, USA) and Microsoft Excel 2010, where p = 0.05.
Results
3D wrist trajectory validation in simulated swimming
Both sensitivity and specificity result to be equal to 1, that means that all and only the real stroke cycles were detected by the algorithm.
An example of the average right wrist trajectory of a single participant and overall statistic results of the comparison of the methods for computing the wrist trajectories are illustrated in Figure 4. Comparing the two estimated wrist trajectories (KMS and 3DIMMU) with those measured by the gold standard (MBS), similar and shifted patterns were observed. The shift in the patterns caused not negligible RMSEs and not negligible 3D mean distance between the trajectories. Despite that, the results showed a correlation magnitude nearly perfect (see Table 1). Figure 5 shows the temporal data series of the average right wrist trajectories of a single participant obtained by MBS, KMS and IMMUs methods.
Figure 4.
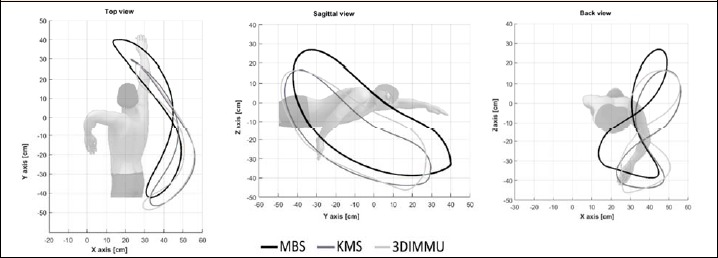
Results of sagittal, back and top views of the three mean trajectories of the right wrist of a single participant: the trajectories directly measured with marker-based stereophotogrammetry system (MBS, black line); the trajectories estimated from stereophotogrammetric data applying the kinematic chain model (KMS, dark grey line); the trajectory estimated from inertial sensors data applying the same model (IMMU, bright grey line).
Table 1.
Statistical comparison of the results obtained by proposed methods: the trajectories directly measured with marker-based stereophotogrammetry system (MBS); the trajectories estimated from stereophotogrammetric data applying the kinematic chain model (KMS); the trajectory estimated from inertial sensors data applying the same model (3DIMMU).
| MBS vs KMS | MBS vs 3DIMMU | KMS vs 3DIMMU | |
|---|---|---|---|
| RMSE (cm) | 4.5 | 7.7 | 6.6 |
| 90% percentile of absolute error (cm) | 6.9 | 12.4 | 10.3 |
| Correlation (r) | 0.99 | 0.94 | 0.93 |
| Absolute Bias (cm) | -1.6 | -2.9 | -1.3 |
| 3d mean distance (cm) | 7.8 (±1.7) | 13.0 (±4.5) | 10.8 (±3.2) |
| nPVI | 0.53 (±0.51) | 0.79 (±0.57) | 0.26 (±0.26) |
Figure 5.
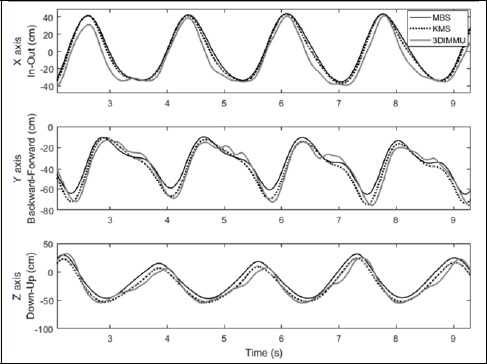
Temporal data series of the average right wrist trajectories of a single participant obtained by MBS (black line), KMS (dotted black line) and IMMUs (grey line) methods.
Stroke phases detection validation in swimming
The ICC value across the different stroke cycles for the stroke phases detection was always above 0.90. This result indicated the good repeatability of the stroke phases detection algorithm. The sensitivity analysis performed to evaluate the error introduced by an inaccurate measurement of body segment lengths, reveals a maximum RMSE of 2%.
Stroke durations percentage of the entry and catch, pull, push and recovery phases for V75% and V100% using 3DIMMU were 36.7 (± 8.2)%, 21.8 (± 6.9)%, 13.2 (± 2.8)%, 28.5 (± 4.3)% and 32.4 (± 3.6)%, 22.9 (± 4.4)%, 15.3 (± 6.1)%, 28.3 (± 5.3)%, respectively. One-way ANOVAs revealed no significant differences in absolute error due to testing procedure (3DIMMU versus TLC) between velocity groups (p = 0.074, 0.554, 0.323 and 0.320 for entry and catch, pull, push and recovery phases, respectively).
On average over the four participants, V75% swimmers adopted a catch-up pattern of coordination, with a mean index of coordination of -16.8 (± 3.9%). A relative opposition was noted in the V100% swimmers, with an index of coordination close to zero (-2.8 ± 1.8%, from –4.2 ± 1.5% to 0.5 + 1.8%). The increase of velocity from V75% to V100% was associated with a switch from catch-up to opposition coordination mode.
The mean (±SD) values of the entry and catch, pull, push and recovery phases duration in percentage of the complete cycle detected using 3DIMMU versus TLC for the whole group were 34.7 (± 6.8)%, 22.4 (± 5.8)%, 14.2 (± 4.4)%, 28.4 (± 4.5)% and 33.9 (± 6.8)%, 21.8 (± 6.0)%, 14.5 (± 4.2)%, 29.8 (± 5.5)%, respectively. 3DIMMU highlighted low bias (0.8%, 0.6%, 0.5%, 1.4%), reasonable RMS error (2.9%, 2.8%, 2.3%, 3.5%) and very large correlation (r = 0.91, r = 0.89, r = 0.86, r = 0.81) for entry and catch, pull, push and recovery phases, respectively.
The agreement between stroke phase detection in percentage of the complete cycle estimated by TLC and 3DIMMU is reported in Figure 6. The 95% limits of agreements (LoA) for the duration of entry and catch, pull, push and recovery phases were always lower than 7.7% of cycle duration showed then a good agreement between the two methods.
Figure 6.
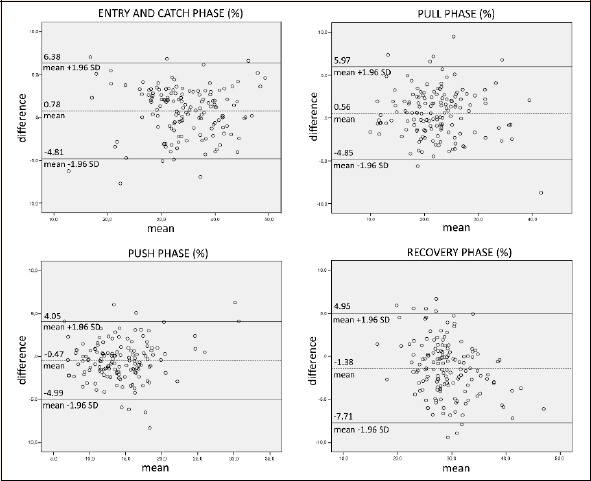
Bland–Altman plots representing mean (x-axis) and difference (y-axis) between the values of stroke phase detection in percentage of the complete cycle estimated by 2D video analysis (TLC) and 3D wrist trajectory using inertial sensor devices (IMMU). The solid and dotted lines represent the ± 1.96 SD limits of agreement and the mean, respectively.
Discussion
An algorithm for automatic complete stroke phase detection based on the 3D wrist trajectory using IMMUs was proposed and validated with respect to video analysis. A first analysis revealed both sensitivity and specificity equal to 1 in the detection of the stroke cycles. A very large mean correlation (r = 0.87), low bias (mean 0.8%) and LoA (7.7%), and reasonable RMS error (mean 2.9%) for the stroke phases duration were observed. The swimmer’s velocity and arm coordination model do not affect the performance of the algorithm in stroke phases detection. The results support the use of wearable IMMUs for automatic temporal phase detection based on 3D wrist trajectory in front crawl swimming.
3D wrist trajectory validation in simulated swimming
3D underwater motion analysis supports the quantitative evaluation of the swimmer performance, disclosing the potentiality to improve the movement pattern efficiency of the athletes and their results during competition. In this study, the accuracy of the wrist’s coordinates estimation computed using IMMUs was assessed in simulated swimming (dry-land condition) through a comparison with stereophotogrammetric system and a very similar but shifted patterns of the wrist trajectory were observed. The statistical results of the present study regarding the absolute spatial position of the wrist showed critical errors for the hand trajectory estimation: a more specific kinematics chain model of the upper limbs is requested if the 3D coordinates of the wrist are the main topic of the study. However, the identification of the entry, the maximum depth, the exit and the backward movements of the wrist are related to the wrist trajectory and not only to the absolute spatial position of the wrist with respect to the trunk. A nearly perfect correlation suggests that the 3D wrist trajectory can be used for an accurate identification.
The 3D wrist trajectory has been previously estimated using different techniques such as stereophotogrammetry (Silvatti et al., 2013; Samson et al., 2015b) and computational fluid dynamics analysis (Cohen et al., 2015). As no data were available, no quantitative comparison could be performed.
To date, only one study estimated the 3D wrist trajectory using IMMUs (Nakashima et al., 2010). The method exploited a single unit of accelerometer and gyroscope positioned on the wrist and a distance error of 50mm was measured on a single subject. These results are consistent to that found in the present study. However, the method proposed by Nakashima relied on the video-based analysis for the assessment of initial direction of the sensing unit and cannot be defined as solely IMMU based.
Stroke phases detection validation in swimming
The accuracy and precision of the proposed algorithm to detect the stroke phases was tested using a 2D video-based system as gold standard. The mean difference between inertial and motion analysis systems was always lower than 7.7% of cycle duration in detecting the start events of each phase. The error and mean bias found indicate the 3D trajectory computed using IMMUs as a viable option for swimming arm-stroke phase assessment. The swimmer’s velocity variation and relative arm coordination model seem to have no influences in the detections of stroke phases. Then, the changes of spatiotemporal parameters of the stroke (stroke rate and length) due to the increase of swimming velocity (Craig et al., 1985) did not affect the accuracy and precision of the proposed algorithm. Furthermore, the arm-stroke phases structure and the upper limp coordination model were stable when increase of velocity occurred from submaximal to maximal velocity, as showed previously by Dadashi et al., (2016) in recreational swimmers.
The entry phase points out the beginning of the underwater stroke of the arm in a front crawl. Many authors have reported the leading role of this phase in order to prepare the following propulsive phase and decrease the drag during the stroke (Samson et al., 2015b; Toussaint et al., 2000). The validation of hand entry in water was performed using IMMUs applying an approach completely independent from the video-analysis in no simulated front-crawl swimming. Furthermore, the detection of this latter arm stroke instant is carried out without using video-based system making our process of stroke phase detection independent to video analysis. The entry phase duration in percentage of the complete cycle was very similar to the values reported in a previous study for submaximal intensities in front-crawl, as well as for all the stroke phases detected in this study (McCabe and Sanders, 2012).
The percentage duration of the stroke phases was in line with previous findings (Millet et al., 2002; McCabe et al., 2011). Generally, skilled swimmers have been characterized by shorter pull and longer push phases. The national level of the participants of this study could be the major causes of the discrepancy between the higher results for the pull and push phases in Dadashi’s study (2016) where well-trained and recreational swimmers were involved.
Considering the errors in identifying the stroke phases through IMMUs, comparable results were found with respect to Dadashi’s study (2013) and Callaway’s study (2015), despite the different methods used. As previous highlighted for the stroke detection using video analysis (Cortesi et al., 2012; McCabe et al., 2011) and as suggested by Mangia et al. (2017), the identifications of the starting events for each stroke phase throughout wrist position was found to be a robust method for the detection of all arm-stroke phases in front-crawl. The proposed algorithm was found to be robust with respect to the body segment length measures, with RMSE in line with the accuracy of the proposed algorithm. For these reasons, we believe that the error in measuring the lengths of the body segments does not affect the performance of the algorithm.
Regarding the transferability of the proposed algorithm to the swimmer’s population, the different arm coordination analyzed in this study shows a transition from catch-up model to opposition model between 75% and 100% of maximal velocity, in agreement with the results of Seifert et al. (2010). Then, the proposed algorithm seems to be not influenced by the arm coordination model and swimmer’s velocity, as well as completely independent from the video-analysis.
Limitations, future directions and practical applications
Although the validity of the algorithms for stroke phase detection was demonstrated in the present study, improvement of the accuracy regarding spatial position is needed for future analysis of wrist kinematic parameters. Comparing the two 3D wrist trajectories estimated using the kinematic model chain with those measured by the gold standard, similar but shifted patterns were observed. This shifting error can be largely explained by the rigid body model assumption that could be critical for the thorax segment particularly during swimming. A possible solution could be taking into account the motion of the gleno-humeral joints adding an IMMU on the scapula. However, this solution would be in contrast with the wearability and drag enhancement (Gatta et al., 2015) of the system. The decision of performing a 3D wrist trajectory validation not directly in water environment is due to the less accurate 3D tracking process due to bubbles and water turbulences. The biomechanical model does not consider the hand segment, to ensure the stability of the IMMUs measurements and to not compromise the hand water sensibility of the swimmer. However, if the limits on the accuracy of the wrist joint angular estimation will be overcome, the inclusion in the biomechanical model of the hand could increase the reliability of our detection. In this latter case the model will be more comprehensive since the propulsive forces of swimmer depend strongly on the hand orientation.
The obtained accuracy can be considered sufficient to satisfy the coaches and athletes training purposes. Indeed, this information can be used for quantitative stroke analysis of the arm action during training session and for movement features extraction of both left and right arms independently. The intra-cyclic stroke variability and stroke-by-stoke variability of the arm stroke phases can be analyzed by the coaches using IMMU wearable easily and completely independent from the video-analysis, and that not require complex setting. The coach may utilise the IMMUs in daily or weekly routine as quantitative analysis approaches to assess continuously the arm-stroke motion. In a training context, the intra-trial and intra-laps variability analysis of the stroke phases duration and IdC could provide useful information to assess the swimmer’s adaptations to event constraints and the potential influence of these fluctuations on the action economy and movements self-organization (Simbaña Escobar et al, 2018). In this regard, the applicability of the proposed algorithm in the 25 m pool is restricted comparing to 50 m pool: the high frequency of occurrence of non-detected cycles (first and last cycle of each lap) could affect the total number of data assessed. This limitation leads directly to a practical suggestion to the use of 50 m pool when the aim is the acquisition of a substantial number of stroke cycles.
Future methodological perspectives will include the reduction of the number of IMMU units to improve the wearability of the system, a full-automatic algorithm for the identification of the stroke phases without a fixed thresholds values for the tENTRY and tPULL events, and dedicated calibration trials (Roetenberg et al., 2009) for removing manual body segment measures. Regarding the applications, the arm-stroke phase structure in a population presenting different levels of expertise will be investigated. Subsequently, the four competitive swimming styles and the effect of fatigue/exercise duration on stroke phases structure could be explored using the same methodological criteria.
Conclusion
The validity of the proposed approach to detect all stroke phases through wrist spatial position in front crawl using IMMUs is here demonstrated by the comparison with video-based analysis. The strong correlation founded with the gold standard explains the similarity among the wrist trajectories patterns. The 3D wrist trajectory can be used for an accurate and complete identification of the stroke phases in front crawl using IMMUs. The results indicated the 3D trajectory computed using IMMUs as a viable option for swimming arm-stroke phases complete assessment.
Acknowledgements
Funding for this study was obtained from a research grant awarded to ALMA IDEA - University by Bologna. Researchers involved in this study have no financial or personal interest in the outcome of results. The experiments comply with the current laws of the country in which they were performed. The authors have no conflict of interest to declare.
Biographies

Matteo CORTESI
Employment
Research Fellow in Swimming Science; Department for Life Quality Studies, University of Bologna.
Degree
PhD
Research interest
Biomechanics and energetics in swimming.
E-mail: m.cortesi@unibo.it

Andrea GIOVANARDI
Employment
Biomedical Engineer; Adidas Digital, Herzogenaurach (DE).
Degree
Bachelor Degree
Research interest
Biomechanics, human movement analysis, wearables, machine learning algorithms.
E-mail: a.giova83@gmail.com
Giorgio GATTA
Employment
Professor of Swimming Science; Department for Life Quality Studies, University of Bologna.
Degree
PhD
Research interest
Biomechanics and energetics in swimming.
E-mail: giorgio.gatta@unibo.it

Anna Lisa MANGIA
Employment
Post-Doctoral Researcher in Biomechanics; Health Sciences and Technologies, Interdepartmental Centre for Industrial Research, University of Bologna.
Degree
PhD
Research interest
Human movement analysis in orthopaedics and sports science applications.
E-mail: annalisa.mangia2@unibo.it

Sandro BARTOLOMEI
Employment
Post-Doc associate in Sport Science; School of Pharmacy, Biotechnology and Sport Science, University of Bologna.
Degree
PhD
Research interest
Acute and chronic effects of resistance training; strength training periodization; recovery response following resistance exercise.
E-mail: sandro.bartolomei@unibo.it

Silvia FANTOZZI
Employment
Professor of Biomechanics; Department of Electrical, Electronic and Information Engineering, University of Bologna.
Degree
PhD
Research interest
Human movement analysis in orthopaedics and sports science applications.
E-mail: silvia.fantozzi@unibo.it
References
- Callaway A.J. (2015) Measuring kinematic variables in front crawl swimming using accelerometers: a validation study. Sensors 15, 11363-11386. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Camomilla V., Bergamini E., Fantozzi S., Vannozzi G. (2018) Trends supporting the in-field use of wearable inertial sensors for sport performance evaluation: A systematic review. Sensors 18(3), 873-923. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Cappozzo A., Catani F., Della Croce U., Leardini A. (1995) Position and orientation in space of bones during movement: anatomical frame definition and determination. Clinical Biomechanics 10, 171-178. [DOI] [PubMed] [Google Scholar]
- Ceccon S., Ceseracciu E., Sawacha Z., Gatta G., Cortesi M., Cobelli C., Fantozzi S. (2013) Motion analysis of front crawl swimming applying CAST technique by means of automatic tracking. Journal of Sports Sciences 31, 276-287. [DOI] [PubMed] [Google Scholar]
- Ceseracciu E., Sawacha Z., Fantozzi S., Cortesi M., Gatta G., Corazza S., Cobelli C. (2011) Markerless analysis of front crawl swimming, Journal of Biomechanics 44, 2236-2242. [DOI] [PubMed] [Google Scholar]
- Chollet D., Chalies S., Chatard J.C. (2000) A new index of coordination for the crawl: description and usefulness. International Journal of Sport Medicine 21, 54-59. [DOI] [PubMed] [Google Scholar]
- Cohen R. C., Cleary P. W., Mason B. R., Pease D. L. (2015) The role of the hand during freestyle swimming. Journal of Biomechanical Engineering 137, 111007. [DOI] [PubMed] [Google Scholar]
- Cortesi M., Fantozzi S., Gatta G. (2012) Effects of distance specialization on the backstroke swimming kinematics. Journal of Sports Science & Medicine 11, 526-532. [PMC free article] [PubMed] [Google Scholar]
- Cortesi M., Fantozzi S., Di Michele R., Zamparo P., Gatta G. (2014) Passive drag reduction using full-body swimsuits: the role of body position. The Journal of Strength & Conditioning Research 28, 3164-3171. [DOI] [PubMed] [Google Scholar]
- Craig A.B., Jr., Skehan P.L., Jr., Pawelczyk J.A., Boomer W.L. (1985) Velocity, stroke rate, and distance per stroke during elite swimming competition. Medicine Science and Sports Exercise 17, 625-634. [DOI] [PubMed] [Google Scholar]
- Cutti A. G., Giovanardi A., Rocchi L., Davalli A., Sacchetti R. (2008) Ambulatory measurement of shoulder and elbow kinematics through inertial and magnetic sensors. Medical & Biological Engineering & Computing 46, 169-178. [DOI] [PubMed] [Google Scholar]
- Dadashi F., Crettenand F., Millet G. P., Seifert L., Komar J., Aminian K. (2013) Automatic front-crawl temporal phase detection using adaptive filtering of inertial signals. Journal of Sports Sciences 31, 1251-1260. [DOI] [PubMed] [Google Scholar]
- Dadashi F., Millet G. P., Aminian K. (2016) Front-crawl stroke descriptors variability assessment for skill characterisation. Journal of sports sciences 34, 1405-1412. [DOI] [PubMed] [Google Scholar]
- Fantozzi S., Giovanardi A., Magalhães F. A., Di Michele R., Cortesi M., Gatta G. (2016) Assessment of three-dimensional joint kinematics of the upper limb during simulated swimming using wearable inertial-magnetic measurement units. Journal of Sports Sciences 34, 1073-1080. [DOI] [PubMed] [Google Scholar]
- Gatta G., Cortesi M., Di Michele R. (2012) Power production of the lower limbs in flutter-kick swimming. Sports Biomechanics 11, 480-491. [DOI] [PubMed] [Google Scholar]
- Gatta G., Cortesi M., Fantozzi S., Zamparo P. (2015) Planimetric frontal area in the four swimming strokes: Implications for drag, energetics and speed. Human Movement Science 39, 41-54. [DOI] [PubMed] [Google Scholar]
- Gourgoulis V., Aggeloussis N., Kasimatis P., Vezos N., Boli A., Mavromatis G. (2008) Reconstruction accuracy in underwater three-dimensional kinematic analysis. Journal of Science and Medicine in Sport 11, 90-95. [DOI] [PubMed] [Google Scholar]
- Guignard B., Rouard A., Chollet D., Seifert L. (2017) Behavioral Dynamics in Swimming: The Appropriate Use of Inertial Measurement Units. Frontiers in Psychology 8, 383. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Hopkins W., Marshall S., Batterham A., Hanin J. (2009) Progressive statistics for studies in sports medicine and exercise science. Medicine Science in Sports Exercise 41, 3. [DOI] [PubMed] [Google Scholar]
- Keskinen K.L., Komi P.V. (1993) Stroking characteristics of front crawl swimming during exercise. Journal of Applied Biomechanics 9, 219-226. [Google Scholar]
- Magalhaes F. A. D., Vannozzi G., Gatta G., Fantozzi S. (2015) Wearable inertial sensors in swimming motion analysis: a systematic review. Journal of Sports Sciences 33, 732-745. [DOI] [PubMed] [Google Scholar]
- Mangia A.L., Cortesi M., Fantozzi S., Giovanardi A., Borra D., Gatta G. (2017) The use of IMMUS in a water environment: instrument validation and application of 3D multi-body kinematic analysis in medicine and sport. Sensors 17, 927. [DOI] [PMC free article] [PubMed] [Google Scholar]
- McCabe C.B., Psycharakis S., Sanders R. (2011) Kinematic differences between front crawl sprint and distance swimmers at sprint pace. Journal of Sport Sciences 29, 115-123. [DOI] [PubMed] [Google Scholar]
- McCabe C. B., Sanders R. H. (2012) Kinematic differences between front crawl sprint and distance swimmers at a distance pace. Journal of Sports Sciences 30, 601-608. [DOI] [PubMed] [Google Scholar]
- McGinley J. L., Baker R., Wolfe R., Morris M. E. (2009) The reliability of three-dimensional kinematic gait measurements: a systematic review. Gait & Posture 29(3), 360-369. [DOI] [PubMed] [Google Scholar]
- Millet G. P., Chollet D., Chalies S., Chatard J. C. (2002) Coordination in front crawl in elite triathletes and elite swimmers. International Journal of Sports Medicine 23(02), 99-104. [DOI] [PubMed] [Google Scholar]
- Mooney R., Corley G., Godfrey A., Osborough C., Newell J., Quinlan L. R., ÓLaighin G. (2016) Analysis of swimming performance: perceptions and practices of US-based swimming coaches. Journal of Sport Sciences 34, 997-1005. [DOI] [PubMed] [Google Scholar]
- Murray I.A. (1999) Determining upper limb kinematics and dynamics during everyday tasks. Doctoral thesis, University of Newcastle upon Tyne. 64. [Google Scholar]
- Nakashima M., Ohgi Y., Akiyama E., Kazami N. (2010) Development of a swimming motion display system for athlete swimmers’ training using a wristwatch-style acceleration and gyroscopic sensor device. Procedia Engineering 2, 3035-3040. [Google Scholar]
- Psycharakis S.G., Sanders R.H. (2010) Body roll in swimming: A review. Journal of Sport Sciences 28, 229-236. [DOI] [PubMed] [Google Scholar]
- Riewald S., Rodeo S. (2015) Science of swimming faster. 1th Edition Human Kinetics, Champaign, US. [Google Scholar]
- Roetenberg D., Luinge H., Slycke P. (2009) Xsens MVN: full 6DOF human motion tracking using miniature inertial sensors. Xsens Motion Technologies BV, Tech. Rep, 1. [Google Scholar]
- Rouboa A., Silva A., Leal L., Rocha J., Alves F. (2006) The effect of swimmer’s hand/forearm acceleration on propulsive forces generation using computational fluid dynamics. Journal of Biomechanics 39, 1239-1248. [DOI] [PubMed] [Google Scholar]
- Samson M., Monnet T., Bernard A., Lacouture P., David L. (2015a) Kinematic hand parameters in front crawl at different paces of swimming. Journal of Biomechanics 48, 3743-3750. [DOI] [PubMed] [Google Scholar]
- Samson M., Monnet T., Bernard A., Lacouture P., David L. (2015b) The role of the entry-and-stretch phase at the different paces of race in front crawl swimming. Journal of Sports Sciences 33, 1535-1543. [DOI] [PubMed] [Google Scholar]
- Sandnes F.E., Jian H.L. (2004) Pair-wise variability index: evaluating the cognitive difficulty of using mobile text entry systems. In Proceedings of Mobile Human-Computer Interaction-Mobile HCI. Glasgow, UK 25–37. [Google Scholar]
- Seifert L., Toussaint H.M., Alberty M., Schnitzler C., Chollet D., (2010) Arm coordination, power, and swim efficiency in national and Regional front crawl swimmers. Human Movement Science 29(3), 426-39 [DOI] [PubMed] [Google Scholar]
- Silvatti A.P., Cerveri P., Telles T., Dias F. A., Baroni G., Barros R.M. (2013) Quantitative underwater 3D motion analysis using submerged video cameras: accuracy analysis and trajectory reconstruction. Computer methods in biomechanics and biomedical engineering 16(11), 1240-1248. [DOI] [PubMed] [Google Scholar]
- Simbaña Escobar D., Hellard P., Pyne D. B., Seifert L. (2018) Functional role of movement and performance variability: Adaptation of front crawl swimmers to competitive swimming constraints. Journal of applied biomechanics 34(1), 53-64. [DOI] [PubMed] [Google Scholar]
- Stagni R., Fantozzi S., Cappello A. (2006) Propagation of anatomical landmark misplacement to knee kinematics: performance of single and double calibration. Gait & Posture 24(2), 137-141. [DOI] [PubMed] [Google Scholar]
- Toussaint H.M., Hollander A.P., Berg C.V.D., Vorontsov A. (2000) Biomechanics of swimming. Garrett W.E., Kirkendall D.T. (Eds.), Exercise and Sport Science (pp. 639–660). Philadelphia, PA: Lippincott, Williams & Wilkins. [Google Scholar]