

Summary
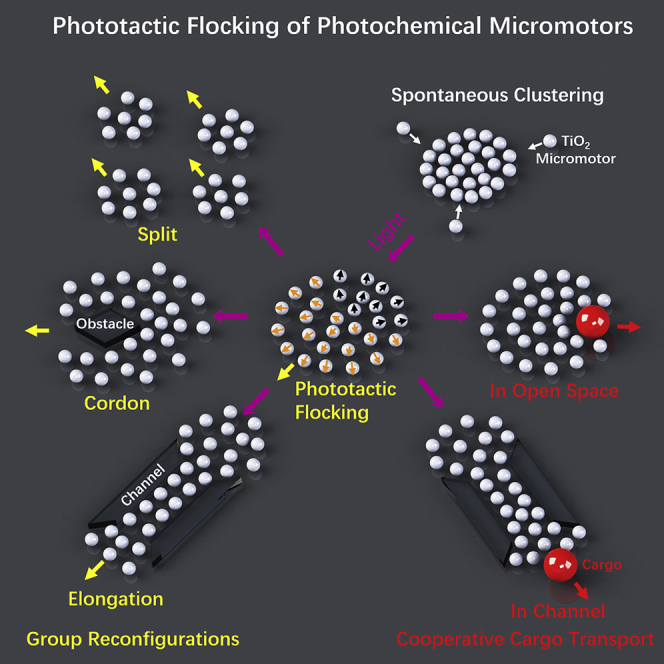
Inspired by astonishing collective motions and tactic behaviors in nature, here we show phototactic flocking of synthetic photochemical micromotors. When enriched with hydroxyl groups, TiO2 micromotors can spontaneously gather into flocks in aqueous media through electrolyte diffusiophoresis. Under light irradiation, due to the dominant nonelectrolyte diffusiophoretic interaction resulting from the overlap of asymmetric nonelectrolyte clouds around adjacent individuals, these flocks exhibit intriguing collective behaviors, such as dilatational negative phototaxis, high collective velocity, and adaptive group reconfiguration. Consequently, the micromotor flocks can migrate along pre-designed paths and actively bypass obstacles with reversible dilatation (expansion/contraction) under pulsed light navigation. Furthermore, owing to the enhanced driving force and rapid dilatational area covering, they are able to execute cooperative tasks that single micromotors cannot achieve, such as cooperative large-cargo transport and collective microenvironment mapping. Our discovery would promote the creation of reconfigurable microrobots, active materials, and intelligent synthetic systems.
Subject Areas: Chemistry, Catalysis, Nanoparticles
Graphical Abstract
Highlights
-
•
TiO2 micromotors with rich hydroxyl groups can spontaneously gather into flocks
-
•
The flocks exhibit dilatational negative phototaxis and adaptive reconfigurations
-
•
The flocks can migrate along pre-designed paths and actively bypass obstacles
-
•
The flocks can execute cooperative cargo transport and collective mapping
Chemistry; Catalysis; Nanoparticles
Introduction
In nature, a variety of living organisms, including bacteria, fish, birds, and mammals, can self-organize into large groups through local communications, despite the large differences in size scale and cognition capability (Parrish and Edelstein-Keshet, 1999, Reynolds, 1987, Vicsek and Zafeiris, 2012). Furthermore, the grouping animals may readily undergo adaptive group reconfigurations (such as expansion/contraction, split/fusion, and bend/elongation) in response to environmental cues like predators, foods, and obstacles (Chen et al., 2017a, Schaerf et al., 2017). As a result, they exhibit rich types of emergent phenomena and cooperative functions that individuals do not possess, thus greatly improving the possibility to survive and prosper (Feinerman et al., 2018, Ioannou et al., 2012).
Inspired by such astonishing collective behaviors in nature and motivated by great visions of creating groups of micro/nanorobots to execute complex tasks that individuals cannot achieve, researchers have recently been dedicated to collective behaviors of synthetic micro/nanomotors (Singh et al., 2017, Wang et al., 2015, Wu et al., 2018, Xie et al., 2019, Xu et al., 2015, Yan et al., 2016, Yu et al., 2018) after an in-depth understanding of the propulsion and design of single counterparts (Guix et al., 2014, Li et al., 2016, Moran and Posner, 2017, Sánchez et al., 2015, Wang and Pumera, 2015, Xu et al., 2017). For example, with the introduction of local physical interactions to neighboring individuals under external AC electric, light, acoustic, and oscillating magnetic fields, Janus spheres, bimetallic nanomotors, conductive particles, and magnetic particles have been demonstrated to be aggregated into active chains, clusters, and swarms usually in a passive manner (Aranson and Sapozhnikov, 2004, Deng et al., 2018, Sapozhnikov et al., 2003, Xu et al., 2014, Yan et al., 2016, Yu et al., 2018). In contrast, some chemically powered micromotors, such as SiO2/TiO2, AgCl, Ag3PO4, and Fe2O3/polymer micromotors can sense and respond to signaling chemicals released from their neighboring conspecifics and thus spontaneously gather into clusters or assemblies (Duan et al., 2013, Hong et al., 2010, Ibele et al., 2009, Palacci et al., 2013). However, these chemically powered micromotors without external guidance only show collective positional order through clustering and manifest no significant orientational order in the swimming direction (Zottl and Stark, 2016), making them unable to actively find targets or working sites for fulfilling cooperative tasks as a group.
In analogy to the tactic behavior of living organisms in nature that enables them to move toward or away from the stimulus to find nutrients or escape threats, single tactic micro/nanomotors have been reported to independently achieve self-navigation or self-targeting in unknown or dynamically changing environments for fulfilling tasks (You et al., 2018). Herein, we demonstrate tactic behaviors of grouping micromotors. TiO2 micromotors with rich hydroxyl groups can spontaneously gather into flocks due to the electrolyte diffusiophoretic attractions resulting from the different diffusivities of the self-secreted electrolyte signals (H+ and OH−). The gathered micromotors under light irradiation exhibit intriguing collective behaviors because of the dominant nonelectrolyte diffusiophoretic interactions. For instance, compared with single micromotors, the flocking micromotors show dilatational negative phototaxis with greatly enhanced collective velocity due to the interparticle accumulation of nonelectrolyte products (i.e., O2 molecules) and the enhanced concentration gradient across the flock. Furthermore, the micromotor flock can split into multiple subflocks by regrouping the scattered individuals after continuous light irradiation and also reconfigure adaptively in response to local landscapes because of the different individual behaviors near landscape boundaries, including different motion directions and diffusiophoretic repulsions to near neighbors. Thus, under pulsed UV light navigation, the as-developed flocks can not only collectively migrate along pre-designed paths and actively bypass obstacles but also execute cooperative tasks because of the strong driving force and rapid dilatational area covering, such as cooperatively transporting large cargoes and collectively mapping local microenvironments.
Results
To demonstrate phototactic flocking of synthetic micromotors, we first synthesized spherical anatase TiO2 microparticles with a diameter of 1.2 μm as individual micromotors (Figure 1A). The Thermogravimetric-differential scanning calorimeter (TG-DSC) analysis (the right panel in Figure 1A) and quantitative elementary analysis of hydrogen confirm that the TiO2 micromotors have hydroxyl group content (COH) as high as 0.94 mmol g−1. The Zeta potential (ζ) of the micromotors is measured to be −17 mV. The TiO2 micromotors in aqueous media with a concentration (Cp) of 0.35 mg mL−1 spontaneously attract near neighbors near a glass substrate and gradually gather into small flocks (see Figure S1A and Video S1) and eventually grow into large flocks with an average diameter of 50 μm within 2 min (Figure 1B). The diameter of the flocks increases with Cp, and no flocks can be formed if Cp decreases to 0.15 mg mL−1 (see Figure S1B).
Figure 1.

Characterization and Spontaneous Clustering Behaviors of the Micromotors
(A) Scanning electron microscopy (SEM) image, X-ray diffraction (XRD) pattern, and TG-DSC analysis of the TiO2 micromotors. Scale bar: 200 nm.
(B) TiO2 micromotor flocks in the aqueous medium with 0.25 wt.% H2O2. Scale bar: 20 μm.
(C) Numerical simulation of electric potential (ϕ) resulting from the different diffusivities of the secreted H+ and OH− around three TiO2 micromotors with an interparticle distance of 3 μm. Black triangles indicate the direction of E.
(D) The simulated velocity in the X direction (u) and streamlines (black curves) of the converging hydrodynamic flow induced by the electroosmotic slip of electron double layer of the glass substrate and TiO2 micromotors under the local E, indicating that TiO2 micromotor 1 and 3 would move toward 2 along the converging electroosmotic fluid flow.
(E) Clustering behaviors of the micromotors with different COH obtained at different temperatures, and those obtained at 650°C after alkaline hydrogen peroxide (AHP) treatment, respectively.
Scale bar: 20 μm.
The spontaneous clustering of the TiO2 micromotors is closely associated with COH. TiO2 micromotors with high COH dispersed in water simultaneously secrete H+ ions from surface acidic bridging hydroxyls (pKa = 2.9) and OH− ions from basic terminal hydroxyls (pKa = 12.7) by dissociating water, respectively, as shown in Equations 1 and 2 (Boehm, 1971, Gun'ko et al., 2001, Sugimoto and Zhou, 2002).
| (Equation 1) |
| (Equation 2) |
Because of the different diffusivities of H+ (9.97×10−9 m2 s−1) and OH− (5.27×10−9 m2 s−1), H+ would diffuse away from the surface of the TiO2 micromotors much faster than OH−. Consequently, H+ and OH− are unevenly distributed in the local area around the micromotors, and a local electric field (E) is established with a direction pointing to the interspace of neighboring TiO2 micromotors (black triangles in Figure 1C). This local E then produces a converging electroosmotic flow (Figure 1D) due to the migration of cations in the electrical double layer of TiO2 micromotors and glass substrate. Along the converging electroosmotic flow (black curves with arrows in Figure 1D), the dispersed TiO2 micromotors move toward each other to form a small flock, which then attract other adjacent TiO2 micromotors and grow into a large flock. Thus, the spontaneous clustering of TiO2 micromotors follows the long-range electrolyte diffusiophoresis (Hong et al., 2010), in which the electroosmosis dominates the clustering process as the absolute value of ζ of the glass substrate (ζ = −85 mV) (Duan et al., 2013) is larger than that of the micromotors (ζ = −17 mV), as depicted in Figure S2. On the other hand, the short-range electrostatic repulsions between negatively charged TiO2 micromotors prevent them from physical contacts and clumping after clustering.
Similar clustering behaviors of the TiO2 micromotors are observed in the medium without H2O2 and in dark, suggesting the negligible effect of H2O2 and visible light from the microscope on their clustering, as verified in Figure S3. To further investigate the influence of COH on the spontaneous clustering of TiO2 micromotors, TiO2 micromotors with different COH are fabricated at different calcination temperatures (T), as shown in Figure S4. The TiO2 micromotors with COH of 9.6 and 4.4 mmol g−1, which are obtained at room temperature (RT) and T of 200°C, exhibit an obvious clustering behavior in water. In contrast, the micromotors calcined at T of 650°C (COH = 0.036 mmol g−1) manifest no clustering behavior. However, if they are treated with alkaline hydrogen peroxide solution (Wu et al., 2016) to render them with rich hydroxyl groups (COH = 0.18 mmol g−1), they could form into flocks again. This result further verifies that the clustering behavior stems from the electrolyte diffusiophoresis of the hydroxyl-rich TiO2 micromotors. In addition, if the negatively charged glass substrate is replaced by a positively charged glass slide with other conditions unchanged, no clustering behavior is observed for the TiO2 micromotors, as the electroosmosis, in this condition, tends to drive them to move away from each another (see Figure S5).
After clustering, TiO2 micromotors show intriguing collective motion behaviors, which are significantly different from the behaviors of the ungrouping (single) ones. When UV is applied sidewise in the Y direction (UVY), dispersed single TiO2 micromotors are activated and moved phototactically as independent micromotors in the same direction (Y axis direction) (Chen et al., 2017b) due to the negligible interaction among them (the left panel in Figure 2A). They stopped immediately and only showed random Brownian motions (the right panel in Figure 2A) when UV was off (see Video S2). In sharp contrast, the TiO2 micromotors after clustering showed a collective dilatational phototaxis when UV was on. They scattered in all directions and moved away from the light source as a group (see Video S3), in analogy to the asymmetric flash expansion of shoaling fish under an overhead threat (Litvak, 1993). Then, the scattered micromotors aggregate into cohesive flocks again at a new central point after UV is off (see Video S3). Figure 2B shows the time-lapse microscopic images of a typical micromotor flock (top panels) and the corresponding trajectories of individual micromotors (bottom panels), reflecting the dilatational collective order of the flock (Attanasi et al., 2014). It also shows that the flock expands at a normalized rate (r) of 1.2 s−1 under UVY irradiation (see Figure S6) and contracts at r of −0.08 s−1 after the UV irradiation stops (Figure 2C). Here the normalized rate r = (Dt - D0)/D0t, in which D0 and Dt are the flock size at a time of 0 s and t, respectively. Instantaneous velocity vectors of individual micromotors in the flock suggest that the micromotors at the forefront of the flock move much faster in the +Y direction than those at the rear end in the –Y direction under UVY irradiation (Figure 2D). This implies that the flock moves away from the UVY stimulus, showing an overall negative phototaxis with a net group velocity (U) of 8.3 μm s−1. In stark contrast, when the light is applied vertically in z axis direction (UVZ), the flock shows only a size expansion and no population-level motion can be observed (see Figure S7 and Video S4). It is worth noting that both peripheral individuals (14 μm s−1) and the whole flock (8.3 μm s−1) show a much higher velocity than the single micromotors (4.6 μm s−1, Figure 2A). These results reveal that, after TiO2 micromotors gather into groups, intriguing collective behaviors have emerged, involving dilatational negative phototaxis and much-increased velocity of the individuals and the whole group.
Figure 2.

Phototactic Flocking of the Micromotors
(A) Phototactic and Brownian motions of single TiO2 micromotors when UVY is on and off, respectively. Images are taken from Video S2. Scale bar: 10 μm.
(B) Optical microscopic images (Top panels) and trajectories (Bottom panels) of the TiO2 micromotors in a flock under UVY irradiation. Scale bar: 20 μm.
(C) Optical microscopic images (Top panels) and trajectories (Bottom panels) of the TiO2 micromotors in a flock when UVY is turned off. Images in B and C are taken from Video S3. Scale bar: 20 μm.
(D) Instantaneous velocity vectors of the TiO2 micromotors in a flock when UVY is on. The length and the color of the arrows denote the magnitude of the velocity, with red and long arrows being the fastest, and dark and short arrows being the slowest. Scale bar: 20 μm.
(E) Steady-state distribution of O2 concentration (C) around three TiO2 micromotors with an interparticle distance of 2 μm. Black triangles represent the gradient (∇C) of O2 concentration. Purple arrows and curves represent the direction of incident UV light and the illuminated surfaces of the micromotors, respectively.
(F) Simulated velocity in the X direction (u) and streamlines (black curves) of the hydrodynamic flow induced by ∇C along the surface of the micromotors.
To decipher the collective behaviors of the TiO2 micromotors under UV irradiation, we have constructed a simple numerical model consisting of three TiO2 micromotors. Under the UV irradiation (purple arrows in Figure 2E), the photocatalytic decomposition of H2O2 occurs asymmetrically on the illuminated and shadowed surfaces of the TiO2 micromotors (see Figure S8). Thus, an asymmetric cloud of O2 molecules is generated around each TiO2 micromotor (micromotor 1, 2, and 3 in Figure 2E) (Chen et al., 2017b). With the asymmetric photocatalytic reactions proceeding, asymmetric O2 clouds overlap and still distribute asymmetrically around the micromotors, as shown in the O2 concentration (C) field in Figure 2E. The generated O2 molecules have a lower C at the illuminated side of micromotor 1 but a higher C there for micromotor 2 and 3 compared with the shadowed side. Thus, a gradient field of the generated O2 concentration (∇C) is formed (black triangles in Figure 2E). The ∇C along the micromotor surface induces a chemiosmotic slip toward the region with high O2 density and thus propels the micromotor to move toward the opposite direction according to the non-electrolyte diffusiophoresis (Anderson, 1989). The hydrodynamic flow (streamlines, black color) generated by the surface chemiosmotic slip suggests that micromotor 1 moves in the -X direction with v1, and micromotor 2 and 3 in the +X direction with v2 and v3 (Figure 2F). Their velocity further follows a relationship of |v3|> |v1| >|v2|, as verified by the velocity (u) of the chemiosmotic slip in the X direction (Figure 2F). Thus, these micromotors move away from one another, suggesting the obvious repulsive interaction between them based on the non-electrolyte diffusiophoresis. On the other hand, if considering these three micromotors as a whole, in addition to the expansion of the group resulted from the repulsions between individuals, the micromotor group would also show a collective phototaxis because of the polarity in the group velocity (v1+ v2 + v3 > 0) in the direction of light irradiation (+X direction). As a result, the expansion and the overall phototaxis of the micromotor flock can be attributed to the dominant effect of nonelectrolyte diffusiophoretic interactions between individual micromotors. The greatly enhanced speed of the peripheral individuals and the whole flock compared with single micromotors can be rationalized by their enhanced nonelectrolyte diffusiophoresis, which stems from the enhanced ∇C across the peripheral individuals and the flock, as confirmed by comparing Figures 2E and 2F with S9A and S9B. At the same light condition as that in Figure 2, passive SiO2 and polystyrene particles (2 μm in size) only show random Brownian motions (Figure S10 and Video S5) in the aqueous medium with 0.25 wt.% H2O2, suggesting that the contribution of light-induced flows is negligible to the flocking of micromotors. When the light is turned off, the production of O2 molecules stops, and the nonelectrolyte diffusiophoretic interactions between the micromotors diminish and finally vanish. In this condition, the electrolyte diffusiophoretic interactions (see Figure S3) dominate again, and the scattered TiO2 micromotors would gather into cohesive flocks again.
Because of the alternative dominance of non-electrolyte and electrolyte diffusiophoretic interactions between individuals when light is on and off, respectively, the micromotor flocks are expected to be operated by a pulsed light with a proper duty cycle. When the pulse (light-on time) is less than 10 s, the scattered individuals are clustering toward a single central point over time after UV is off, while they aggregate at multiple central points to form multiple small subflocks before merging into one due to the overexpansion (Dt/D0 ≥ 500%). As expected, the micromotor flock experiences reversible dilatations (expansion/contraction) when it moves phototactically under the pulsed light irradiation with a pulse of 2.5 s and a duty cycle of 16.7% (Figure 3A and see also Video S6). Furthermore, increasing the UV intensity (I) and fuel concentration (Cf) enhances the expansion and phototactic velocity (U) of the flock (Figure 3B and see also Figure S11) because of the improved generation rate of O2 molecules from the photocatalytic reaction (Mou et al., 2015). The dependence of U on I and Cf follows the Michaelis-Menten law (red curves in Figure 3B), implying that the phototactic flocking is powered by the photocatalytic reaction and the U is controlled by the reaction rate. The plateaus of U suggests that the maximum U of the flock is limited by the maximum rate of the photocatalytic H2O2 decomposition determined by total active sites of the flocking TiO2 micromotors (Solovev et al., 2010). Owing to the unique phototactic motion and reversible dilatations, the TiO2 micromotor flocks can move along a pre-designed path under pulsed light navigation. The dashed line in the left panel of Figure 3C shows a pre-designed path for a flock. Irradiated by the pulsed UV light with on-off repeating cycles depicted in Figure S12, the flock moves phototactically with reversible dilatations, departs from point 1, then passes way stations 2 and 3, and finally reaches the destination 4 (Figure 3C and see also Video S6). This controlled motion behavior suggests that TiO2 micromotor flocks could move along a pre-designed path by programming light irradiation.
Figure 3.

Light-Controlled Motions of the Flocks
(A) The size (D) versus time for a typical flock under pulsed UVY irradiation, indicating the reversible expansion and contraction.
(B) The velocity (U) of the micromotor flock at different UV intensity (I, left panel) and fuel concentration (Cf, right panel).
(C) The TiO2 micromotor flock moves along a pre-designed path under the navigation of pulsed UV irradiation. Images are taken from Video S6. Scale bar: 20 μm.
Besides the phototactic flocking with controlled directions and paths, the TiO2 micromotors could further reconfigure in response to external stimuli or local landscapes. For instance, under continuous irradiation of UV light for more than 40 s, a micromotor flock (the left panel of Figure 4A) would overexpand up to Dt/D0 = 1,500% due to the diffusiophoretic repulsion between individuals. For such an overexpanded flock, the scattered individuals will regroup by preferably attracting their nearest neighbors to form dispersed metastable small subflocks under the diffusiophoretic attraction when UV is turned off. Over 1,100 scattered individuals merge into 155, 88, and 44 small metastable subflocks (with an area Sf ≥ 10 μm2) in 5, 10, and 20 s, respectively, and continue to merge with prolonging time after UV is off (see Video S7). For those metastable small subflocks, if UV is turned on again at this stage, they can collectively move in a phototactic manner. For instance, one micromotor flock can split into 18 phototactic subflocks and gradually merge into four and then two subflocks before finally recovering to the original state due to the diffusiophoretic attractions with one another (the right three panels of Figure 4A and see also Video S7). The results reveal that a TiO2 micromotor flock can reversibly split into multiple small subflocks and re-merge.
Figure 4.

Adaptive Reconfigurations of the Flocks
(A) Reversible splitting and merging of the TiO2 micromotor flock after overexpansion by regrouping the scattered individuals. Images are taken from Video S7. The intensities of UVX and UVY are 0.25 and 1 W cm−2, respectively.
(B) Cordon, splitting, and re-joining of the TiO2 micromotor flock when it bypasses a prism obstacle.
(C) Elongation of the TiO2 micromotor flock when it fits through a narrow channel.
Images in B and C are taken from Video S8. The arrows represent the velocity vectors of the flocking micromotors. All scale bars are 20 μm.
The flocking TiO2 micromotors also show adaptive reconfigurations in response to local landscapes, such as cordon, split, re-joining, and elongation. When encountering a prism obstacle under global UV navigation, a traveling flock deforms into a V-shaped flock and embraces the obstacle, revealing the cordon reconfiguration of the micromotors (Storms et al., 2019). Then, it splits into two subflocks to adapt the profile of the obstacle when it continuously moves forward. Immediately after passing the obstacle, the two subflocks re-join at the far side of the obstacle and continue to move phototactically as a whole (Figure 4B and see also Video S8). The TiO2 micromotor flock can also elongate its body to pass through a narrow channel as a mollusk does. When the flock moves to the inlet of a narrow channel, the micromotors in the front of the flock funnel into the open end of the channel and the micromotors near channel walls would move along them toward the open end. As a result, the flock elongates its body length to adapt the profile of the narrow channel and thereby fits through the narrow channel (Figure 4C and see also Video S8).
The adaptive reconfigurations of flocking TiO2 micromotors to bypass obstacles can be understood by considering the different motion behaviors of individual micromotors near local landscape boundaries. Under UV irradiation, when forefront micromotors encounter impermeable and rigid walls, they can transmit the obstacle information to their neighbors or latecomers via chemical signals (i.e., O2 molecules), of which the gradient induces the repulsive diffusiophoretic interactions with one other and the walls (see Figure S13A). The neighbors or latecomers, along with forefront micromotors, would then change their moving directions and move to the wall ends. As a result, instead of jamming at walls like single micromotors do (e.g., Wall A, see Figure S13B), the flocking micromotors can flow along walls with different directions and bypass obstacles (see Figure S13C and Video S9).
Benefitted from their collective phototaxis and adaptive reconfigurations, the flocking TiO2 micromotors are able to perform cooperative tasks even in a complex environment. For instance, the flocking micromotors can perform cooperative cargo transport in open space and microchannels in resemblance to ants (Feinerman et al., 2018). When a flock of TiO2 micromotors approaches a SiO2 particle with a size of 10 μm, which is ten times that the size of a single micromotor, it can load the cargo as a constituent by pulling it inward through the electrolyte diffusiophoretic attraction. Then, the micromotor flock can transport the large cargo that single motors cannot (see Figure S14) by producing a collective diffusiophoretic repulsion (Figure 5A and see also Video S10). In addition, it can also carry cargo through a microchannel by taking advantage of its adaptive reconfiguration in narrow channels (Figure 5B and see also Video S10). As the phototactic flocks are expected to load various inclusions with cooperative functions, such as other micromotors, passive particles, droplets, micro/nanodevices, cells, and microorganisms, they can be employed as a platform to create reconfigurable microrobots, active materials, and intelligent synthetic systems (Rubenstein et al., 2014). Last but not least, due to the dilatational phototactic motions of the micromotor flock, the scattering flock members can rapidly detect environmental boundaries, cover the local environment under light irradiation (Figures 4B and 4C), and gather again into different collective patterns reflecting local geometrical features after the light is turned off. This implies that the micromotor flocks also have a potential for finding and mapping of local unknown environments like the macroscopic swarm robots (Bayindir, 2016), as verified by the different collective patterns when a flock embraces prism obstacles or squeezes into different narrow channels (see Figure S15).
Figure 5.

Cooperative Cargo Transport of the Flocking TiO2 Micromotors
(A) A flock of TiO2 micromotors transporting a large SiO2 cargo (10 μm in size) in open space. The white dash line indicates the displacement of the SiO2 cargo with the moving flock in the Y direction.
(B) A flock of TiO2 micromotors transporting a large SiO2 cargo (10 μm in size) in a narrow channel.
Images are taken from Video S10. Golden arrows represent directions of the flocks, and red curves are trajectories of the SiO2 cargoes. Golden dots are the positions of the cargo at different time. All scale bars are 20 μm.
Discussion
In summary, we have demonstrated the phototactic flocking behaviors of TiO2 micromotors. The TiO2 micromotors with high hydroxyl-group content in aqueous media can spontaneously gather into flocks owing to the electrolyte diffusiophoretic attractions. Within the micromotor flocks, the individual micromotors under UV irradiation interact with one another via nonelectrolyte diffusiophoresis, and thus rich types of collective behaviors have emerged. Different from single micromotors, the flocking micromotors show a collective dilatational phototaxis with a much higher collective velocity due to the interparticle accumulation of O2 molecules and the enhanced O2 gradient across the flock. In addition, the micromotor flock can split into multiple subflocks by regrouping the scattered individuals, and it also exhibits adaptive group reconfigurations according to local landscapes due to the different behaviors of individuals near the landscape boundaries. Therefore, the micromotor flocks under the pulsed light navigation can migrate along pre-designed paths and bypass obstacles. Moreover, owing to the enhanced driving force and rapid dilatational area covering, they can execute cooperative tasks that single micromotors cannot achieve, such as cooperatively transporting cargoes significantly larger than the single micromotor and also collectively mapping local microenvironments. The as-developed photochemical micromotor flocks are expected to inspire the creation of reconfigurable microrobots, active materials, and intelligent synthetic systems.
Limitations of the Study
As the collective behaviors of the hydroxyl-rich TiO2 micromotors are strongly dependent on their local diffusiophoretic interactions, their primary limitation is the sensitivity to ion concentrations. This limitation makes them difficult to operate in biological media, such as simulated body fluid, serum, or whole blood. Nonetheless, this study has demonstrated that the flocking TiO2 micromotors are powerful for executing cooperative tasks in a deionized water environment due to their intriguing collective behaviors, such as cooperative large-cargo transport and collective microenvironment mapping.
Methods
All methods can be found in the accompanying Transparent Methods supplemental file.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (21875175, 21474078, 51521001, 11574222 and 21522404), the Top Talents Lead Cultivation Project and Natural Science Foundation of Hubei Province (2015CFA003), and the Priority Academic Program Development of Jiangsu Higher Education Institutions. We acknowledge Prof. Haihang Cui from Xi'an University of Architecture and Technology for his valuable discussion related to the numerical simulation. We also acknowledge Mr. Xiaofeng Li and Mr. Ming You for their valuable discussion and the revision of the manuscript.
Author Contributions
F.M. and J.G. conceived the idea and designed the study. J.Z., F.M., and Z.W. performed the experiments. F.M., Z.Z., and S.D. performed the simulations. F.M., J.Z., Z.Z., and J.G. analyzed the data and co-wrote the manuscript. F.M. and J.G. initiated and supervised the project. All the authors contributed to the discussion and reviewed the manuscript.
Declaration of Interests
The authors declare no competing interests.
Published: September 27, 2019
Footnotes
Supplemental Information can be found online at https://doi.org/10.1016/j.isci.2019.07.050.
Contributor Information
Zexin Zhang, Email: zhangzx@suda.edu.cn.
Jianguo Guan, Email: guanjg@whut.edu.cn.
Supplemental Information
References
- Anderson J.L. Colloid transport by interfacial forces. Annu. Rev. Fluid Mech. 1989;21:61–99. [Google Scholar]
- Aranson I.S., Sapozhnikov M.V. Theory of pattern formation of metallic microparticles in poorly conducting liquids. Phys. Rev. Lett. 2004;92:234301. doi: 10.1103/PhysRevLett.92.234301. [DOI] [PubMed] [Google Scholar]
- Attanasi A., Cavagna A., Del Castello L., Giardina I., Melillo S., Parisi L., Pohl O., Rossaro B., Shen E., Silvestri E. Collective behaviour without collective order in wild swarms of midges. PLOS Comput. Biol. 2014;10:e1003697. doi: 10.1371/journal.pcbi.1003697. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bayindir L. A review of swarm robotics tasks. Neurocomputing. 2016;172:292–321. [Google Scholar]
- Boehm H.P. Acidic and basic properties of hydroxylated metal oxide surfaces. Discuss. Faraday Soc. 1971;52:264–275. [Google Scholar]
- Chen C., Liu S., Shi X.Q., Chate H., Wu Y.L. Weak synchronization and large-scale collective oscillation in dense bacterial suspensions. Nature. 2017;542:210–214. doi: 10.1038/nature20817. [DOI] [PubMed] [Google Scholar]
- Chen C., Mou F., Xu L., Wang S., Guan J., Feng Z., Wang Q., Kong L., Li W., Wang J. Light-steered isotropic semiconductor micromotors. Adv. Mater. 2017;29:1603374. doi: 10.1002/adma.201603374. [DOI] [PubMed] [Google Scholar]
- Deng Z., Mou F., Tang S., Xu L., Luo M., Guan J. Swarming and collective migration of micromotors under near infrared light. Appl. Mater. Today. 2018;13:45–53. [Google Scholar]
- Duan W., Liu R., Sen A. Transition between collective behaviors of micromotors in response to different stimuli. J. Am. Chem. Soc. 2013;135:1280–1283. doi: 10.1021/ja3120357. [DOI] [PubMed] [Google Scholar]
- Feinerman O., Pinkoviezky I., Gelblum A., Fonio E., Gov N.S. The physics of cooperative transport in groups of ants. Nat. Phys. 2018;14:683–693. [Google Scholar]
- Guix M., Mayorga-Martinez C.C., Merkoçi A. Nano/micromotors in (bio)chemical science applications. Chem. Rev. 2014;114:6285–6322. doi: 10.1021/cr400273r. [DOI] [PubMed] [Google Scholar]
- Gun'ko V.M., Zarko V.I., Leboda R., Chibowski E. Aqueous suspension of fumed oxides: particle size distribution and zeta potential. Adv. Colloid Interface. 2001;91:1–112. [Google Scholar]
- Hong Y.Y., Diaz M., Cordova-Figueroa U.M., Sen A. Light-driven titanium-dioxide-based reversible microfireworks and micromotor/micropump systems. Adv. Funct. Mater. 2010;20:1568–1576. [Google Scholar]
- Ibele M., Mallouk T.E., Sen A. Schooling behavior of light-powered autonomous micromotors in water. Angew. Chem. Int. Ed. 2009;48:3308–3312. doi: 10.1002/anie.200804704. [DOI] [PubMed] [Google Scholar]
- Ioannou C.C., Guttal V., Couzin I.D. Predatory fish select for coordinated collective motion in virtual prey. Science. 2012;337:1212–1215. doi: 10.1126/science.1218919. [DOI] [PubMed] [Google Scholar]
- Li J., Rozen I., Wang J. Rocket science at the nanoscale. ACS Nano. 2016;10:5619–5634. doi: 10.1021/acsnano.6b02518. [DOI] [PubMed] [Google Scholar]
- Litvak M.K. Response of shoaling fish to the threat of aerial predation. Environ. Biol. Fish. 1993;36:183–192. [Google Scholar]
- Moran J.L., Posner J.D. Phoretic self-propulsion. Annu. Rev. Fluid Mech. 2017;49:511–540. [Google Scholar]
- Mou F., Li Y., Chen C., Li W., Yin Y., Ma H., Guan J. Single-component TiO2 tubular microengines with motion controlled by light-induced bubbles. Small. 2015;11:2564–2570. doi: 10.1002/smll.201403372. [DOI] [PubMed] [Google Scholar]
- Palacci J., Sacanna S., Steinberg A.P., Pine D.J., Chaikin P.M. Living crystals of light-activated colloidal surfers. Science. 2013;339:936–940. doi: 10.1126/science.1230020. [DOI] [PubMed] [Google Scholar]
- Parrish J.K., Edelstein-Keshet L. Complexity, pattern, and evolutionary trade-offs in animal aggregation. Science. 1999;284:99–101. doi: 10.1126/science.284.5411.99. [DOI] [PubMed] [Google Scholar]
- Reynolds C.W. Flocks, herds and schools: a distributed behavioral model. ACM SIGGRAPH Comput. Graph. 1987;21:25–34. [Google Scholar]
- Rubenstein M., Cornejo A., Nagpal R. Programmable self-assembly in a thousand-robot swarm. Science. 2014;345:795–799. doi: 10.1126/science.1254295. [DOI] [PubMed] [Google Scholar]
- Sánchez S., Soler L., Katuri J. Chemically powered micro- and nanomotors. Angew. Chem. Int. Ed. 2015;54:1414–1444. doi: 10.1002/anie.201406096. [DOI] [PubMed] [Google Scholar]
- Sapozhnikov M.V., Tolmachev Y.V., Aranson I.S., Kwok W.K. Dynamic self-assembly and patterns in electrostatically driven granular media. Phys. Rev. Lett. 2003;90:114301. doi: 10.1103/PhysRevLett.90.114301. [DOI] [PubMed] [Google Scholar]
- Schaerf T.M., Dillingham P.W., Ward A.J.W. The effects of external cues on individual and collective behavior of shoaling fish. Sci. Adv. 2017;3:e1603201. doi: 10.1126/sciadv.1603201. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Singh D.P., Choudhury U., Fischer P., Mark A.G. Non-equilibrium assembly of light-activated colloidal mixtures. Adv. Mater. 2017;29:1701328. doi: 10.1002/adma.201701328. [DOI] [PubMed] [Google Scholar]
- Solovev A.A., Sanchez S., Pumera M., Mei Y.F., Schmidt O.G. Magnetic control of tubular catalytic microbots for the transport, assembly, and delivery of micro-objects. Adv. Funct. Mater. 2010;20:2430–2435. [Google Scholar]
- Storms R.F., Carere C., Zoratto F., Hemelrijk C.K. Complex patterns of collective escape in starling flocks under predation. Behav. Ecol. Sociobiol. 2019;73:10. doi: 10.1007/s00265-018-2609-0. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Sugimoto T., Zhou X. Synthesis of uniform anatase TiO2 nanoparticles by the gel–sol method. J. Colloid Interface Sci. 2002;252:347–353. doi: 10.1006/jcis.2002.8480. [DOI] [PubMed] [Google Scholar]
- Vicsek T., Zafeiris A. Collective motion. Phys. Rep. 2012;517:71–140. [Google Scholar]
- Wang H., Pumera M. Fabrication of micro/nanoscale motors. Chem. Rev. 2015;115:8704–8735. doi: 10.1021/acs.chemrev.5b00047. [DOI] [PubMed] [Google Scholar]
- Wang W., Duan W., Ahmed S., Sen A., Mallouk T.E. From one to many: dynamic assembly and collective behavior of self-propelled colloidal motors. Acc. Chem. Res. 2015;48:1938–1946. doi: 10.1021/acs.accounts.5b00025. [DOI] [PubMed] [Google Scholar]
- Wu C.-Y., Tu K.-J., Lo Y.-S., Pang Y.L., Wu C.-H. Alkaline hydrogen peroxide treatment for TiO2 nanoparticles with superior water-dispersibility and visible-light photocatalytic activity. Mater. Chem. Phys. 2016;181:82–89. [Google Scholar]
- Wu Z.G., Troll J., Jeong H.H., Wei Q., Stang M., Ziemssen F., Wang Z.G., Dong M.D., Schnichels S., Qiu T. A swarm of slippery micropropellers penetrates the vitreous body of the eye. Sci. Adv. 2018;4:eaat4388. doi: 10.1126/sciadv.aat4388. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Xie H., Sun M., Fan X., Lin Z., Chen W., Wang L., Dong L., He Q. Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation. Sci. Robot. 2019;4:eaav8006. doi: 10.1126/scirobotics.aav8006. [DOI] [PubMed] [Google Scholar]
- Xu L., Mou F., Gong H., Luo M., Guan J. Light-driven micro/nanomotors: from fundamentals to applications. Chem. Soc. Rev. 2017;46:6905–6926. doi: 10.1039/c7cs00516d. [DOI] [PubMed] [Google Scholar]
- Xu T., Soto F., Gao W., Dong R., Garcia-Gradilla V., Magaña E., Zhang X., Wang J. Reversible swarming and separation of self-propelled chemically powered nanomotors under acoustic fields. J. Am. Chem. Soc. 2015;137:2163–2166. doi: 10.1021/ja511012v. [DOI] [PubMed] [Google Scholar]
- Xu T.L., Soto F., Gao W., Garcia-Gradilla V., Li J.X., Zhang X.J., Wang J. Ultrasound-modulated bubble propulsion of chemically powered microengines. J. Am. Chem. Soc. 2014;136:8552–8555. doi: 10.1021/ja504150e. [DOI] [PubMed] [Google Scholar]
- Yan J., Han M., Zhang J., Xu C., Luijten E., Granick S. Reconfiguring active particles by electrostatic imbalance. Nat. Mater. 2016;15:1095–1099. doi: 10.1038/nmat4696. [DOI] [PubMed] [Google Scholar]
- You M., Chen C., Xu L., Mou F., Guan J. Intelligent micro/nanomotors with Taxis. Acc. Chem. Res. 2018;51:3006–3014. doi: 10.1021/acs.accounts.8b00291. [DOI] [PubMed] [Google Scholar]
- Yu J., Wang B., Du X., Wang Q., Zhang L. Ultra-extensible ribbon-like magnetic microswarm. Nat. Commun. 2018;9:3260. doi: 10.1038/s41467-018-05749-6. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Zottl A., Stark H. Emergent behavior in active colloids. J. Phys. Condens. Matter. 2016;28:253001. [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.