

Abstract
A new method for analyzing kinematic patterns during smooth movements is proposed. Subjects are asked to move the end of a two-joint manipulandum to copy a smooth initial target path. On subsequent trials the target path is the subject's actual movement from the preceding trial. Using Principal Components Analysis, it is shown that the trajectories have very low dimension and that they converge toward a linear superposition of the first few principal components. We show similar results for handwriting on an electronic pen tablet. We hypothesize that the low dimensionality and convergence are attributable to combined properties of the internal controller and the musculoskeletal system. The low dimensionality may allow for efficient descriptions of a large class of arm movements.
Keywords: reaching, human, movement, motor control, convergence, principal components, linearity
For unconstrained human hand movements, there is a very large set of possible trajectories determined both by the path as well as by the time at which each point on the path is reached. Accessing or computing such trajectories would require significant motor memory storage and computational power. This consideration leads to the question of whether the human motor system might use a simplified strategy that restricts the set of possible movement trajectories (Bernstein, 1967). Several properties of human movement patterns are well known, including smoothness (Hogan, 1984; Flash and Hogan, 1985; Uno et al., 1989), interjoint torque constraints (Gottlieb et al., 1996), and the “2/3-power law” relating speed to curvature (Viviani and Terzuolo, 1982; Lacquaniti et al., 1983). It is not evident how these observed properties of movement might lead to computational simplifications.
Using Principal Components Analysis (PCA), recent studies of human kinematics have suggested that in several different cases movements can be described as a linear combination of a small number of components. Eighty percent of the variance of grasping hand movements is captured using only two principal components (Santello and Soechting, 1997;Santello et al., 1998), and similar results have been found for typing (Soechting and Flanders, 1997). PCA has also been used to analyze lip motion during speech (Ramsay et al., 1996), trunk bending (Alexandrov et al., 1998), and gait (Loslever et al., 1994; Borghese et al., 1996;Olney et al., 1998), and in all cases the number of components needed to describe the movements was significantly fewer than the total number of possible degrees of freedom. Recent results suggest that 94% of the variance in the pattern of forces generated in the frog hindlimb in response to vestibular stimulation can be explained using only five components (d'Avella and Bizzi, 1998), and 75–90% of the variance of rabbit jaw muscle EMG during voluntary chewing can be explained using only three components (Weijs et al., 1999). This data, along with earlier results on superposition of fields of forces with spinal cord microstimulation (Bizzi et al., 1991; Mussa-Ivaldi et al., 1994; Sergio and Ostry, 1995), provides a physiological correlate to the psychophysical results.
We hypothesize that the trajectory followed by the hand during planar curved movements can be approximated as a linear combination of a small number of principal components. Because human movement has great flexibility and may change depending on the specified task, we developed a new practice methodology to investigate the unconstrained behavior of the human arm. As a subject attempts to copy a curved figure, each movement that he or she makes is used as the target figure for the next trial. We refer to this technique as “iterated practice.” Although an initial target is provided, subsequent movements can modify this target toward a class of preferred movements. The trajectory followed on successive movements becomes progressively smoother with an increasing fraction of the variance accounted for by a decreasing number of principal components. We show that this behavior is a property of smooth linear low-dimensional systems, and we suggest that it arises as a combined effect of an internal human movement controller and mechanical properties of the arm.
MATERIALS AND METHODS
Experimental techniques were approved in accordance with MIT's policy statement on the use of humans in experiments, and informed consent was obtained from eight right-handed subjects. Subjects grasped the end of a two-joint horizontal planar manipulandum (Fayé, 1986) with their dominant hand while seated in a chair aligned with the center of the workspace. A point on a 14 inch video screen placed slightly above eye level tracks the movement of the end of the manipulandum. To start a trial, the subject must move the manipulandum so that the point on the screen lies within a small box corresponding to a 2 cm square in the center of the manipulandum workspace. As soon as the point comes to rest within this box, a smooth target curve is displayed in the lower left-hand corner of the screen. Subjects are asked to copy the approximate shape of the figure smoothly and rapidly within 0.5 sec. There are no other timing constraints, and in particular, subjects are free to choose movement velocities at each point on the curve. The subjects perform their copy in the center of the screen at a distance of several inches from the displayed target curve so that tracing is not possible. The trial starts when the manipulandum leaves the start box and ends when the manipulandum is again brought to rest, at which time the full path of the subject's movement is displayed. Trials lasting >0.5 sec sound a warning buzzer and are discarded. After the first few minutes of practice, subjects had no difficulty in accomplishing movements in <0.5 sec. The horizontal (tangential) and vertical (radial) positions of the manipulandum endpoint were sampled at 100 Hz by a 66 MHz Intel Pentium computer. In some cases, the x, y, and z components of elbow position were also sampled using a Polhemus position sensor. The elbow movement was not constrained. In a related experiment, four subjects moved a pen on the surface of a smooth tablet (Calcomp), and pen tip positions were recorded at 30 Hz. The experiment was otherwise similar.
For each block of trials, the first 2 target paths are identical, and they are generated automatically using:
| Equation 1 |
| Equation 2 |
where x˙(t) and y˙(t) are the path velocities in centimeters per second, the amplitudes α are chosen randomly between 0 and 1, and the phases φ are chosen randomly between −π and π. The dynamic trajectory information is arbitrary, and the display does not include timing or velocity information. Note that although the static shape of the target is described by only 12 variables, the set of possible trajectories that accomplish this path has very high dimensionality because the subjects are free to choose from an infinite number of possible sets of hand velocities.
On trials beyond the second, the target hand path is the average of the recorded hand trajectories on the previous two movements, where the average x and y coordinates are computed point-by-point at each time during the movements. Averaging of two previous paths reduces the effect of small hand tremors or unintentional movements. Points are aligned in time by scaling pairs of movements with linear interpolation to have the same total time from movement onset to return to a stationary position. The size of the displayed target path is normalized so that the larger of the x or y deviation is constant.
Data was collected in blocks of 20 trials, with each block initiated by a new random target path. An example set of hand paths from a single experiment is shown in Figure1A. Experimental sessions lasted 1 hr, during which time 60–80 movement blocks (1200–1600 movements) were performed. Subjects were seen once or twice weekly over a period of 3 months.
Fig. 1.
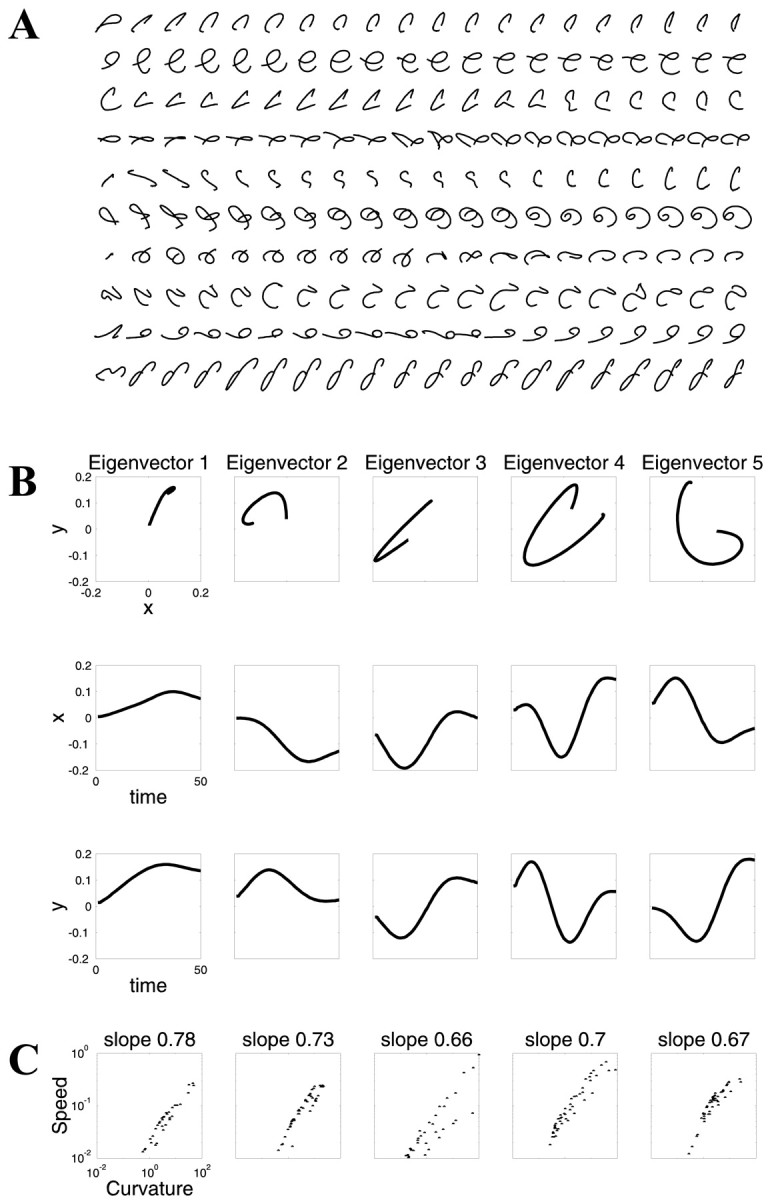
Example of iterated practice and the calculated principal components. A, Each row of the figure shows the recorded hand movements for a block of 20 trials. Each block was started with a new random target shape presented during the first two trials. Errors on the first trial are often the result of accommodation to a new shape. B, The shape of the first five eigenvectors (principal components) computed over 2400 movement trials. The first row shows the path in x–y coordinates, and the second and third rows show the x and y components as a function of time.C, Log–log plots of the instantaneous velocity versus curvature of the components, with numeric values of the average slope of the plot.
PCA was used to analyze the variability in trajectory shape. For each movement, 50 points spaced equally in time from the start to the end of the trajectory were extracted. Thus, all movements are effectively scaled to the same duration. A 100 element column vectorm⃗ was constructed for each movement by joining the x and y coordinates mx(t) and my(t) of the 50 points so thatm⃗ = < mx(1), … , mx(50), my (1), … , my(50) >. (If elbow motion is recorded, then 50 x, y, and z components of elbow position are appended to the hand movement vectorm⃗.) To compute the principal components, the mean vector is subtracted from each of a set of K movement vectors m⃗j, and the covariance matrix is formed:
| Equation 3 |
The eigenvectors c⃗i (principal components) are then calculated using Matlab (version 5.0, MathWorks). To allow comparison across movement trials, all 1200–1600 movements made by a subject on a given day are used to calculate a single set of eigenvectors. The x and y components of the eigenvectors are then separated to yield cix(t) and ciy(t), and example components are shown in Figure 1B. Note that the components themselves represent smoothly curved trajectories. They also satisfy an approximate power law relating velocity to curvature (Viviani and Terzuolo, 1982; Lacquaniti et al., 1983), as shown in Figure1C. There is a high baseline correlation between principal components from different subjects because most movements are smooth, and the early components are thus dominated by low-frequency smooth movement terms.
Any movement vector can be exactly reconstructed as a superposition of the full set of principal components c⃗iaccording to:
| Equation 4 |
where the number of dimensions is 100 (250 if elbow motion is included). If the movements are approximated with a smaller number of components n < 100, then we can write:
| Equation 5 |
so that:
| Equation 6 |
| Equation 7 |
where n is the number of necessary components and is much less than the maximum possible N (100). For any given number of components n, the approximation error is:
| Equation 8 |
and the error en decreases as the number of components n increases.
RESULTS
Figure 2A shows histograms over all subjects and all days of the approximation error en2 for one to five components. The principal components are calculated from the entire set of trajectories on each day. The results are not significantly different if components are calculated from only the final movement of each block, but this leads to increased variability caused by the decreased number of samples. The first five components account for an average of 90% of the hand movement variance. Figure 3shows the decrease in component variance (eigenvalue) with increasing component number for one subject on a typical day. Note the rapid decrease after the first few components, with two orders of magnitude decrease after the first 10 components and 10 orders of magnitude after the first 20.
Fig. 2.

Histograms of movement approximation variance using from one to five principal components for all subjects. Eachpoint in the histograms represents 1 d for one subject. The horizontal axis shows the fraction of the total movement variance accounted for. A, Approximation for two dimensions of hand movement. B, Approximation for all subjects using the components from subject 1. The similarity of components between different subjects makes the approximation possible, but slightly worse than in A. C, Approximation for two dimensions of hand movement combined with three dimensions of unconstrained elbow movements for all subjects. The number of components remains low despite 250 dimensions in the input data. D, Approximation for pen tip position on an electronic drawing tablet. The same phenomenon holds, although in general each subject uses different components than in the manipulandum task.
Fig. 3.
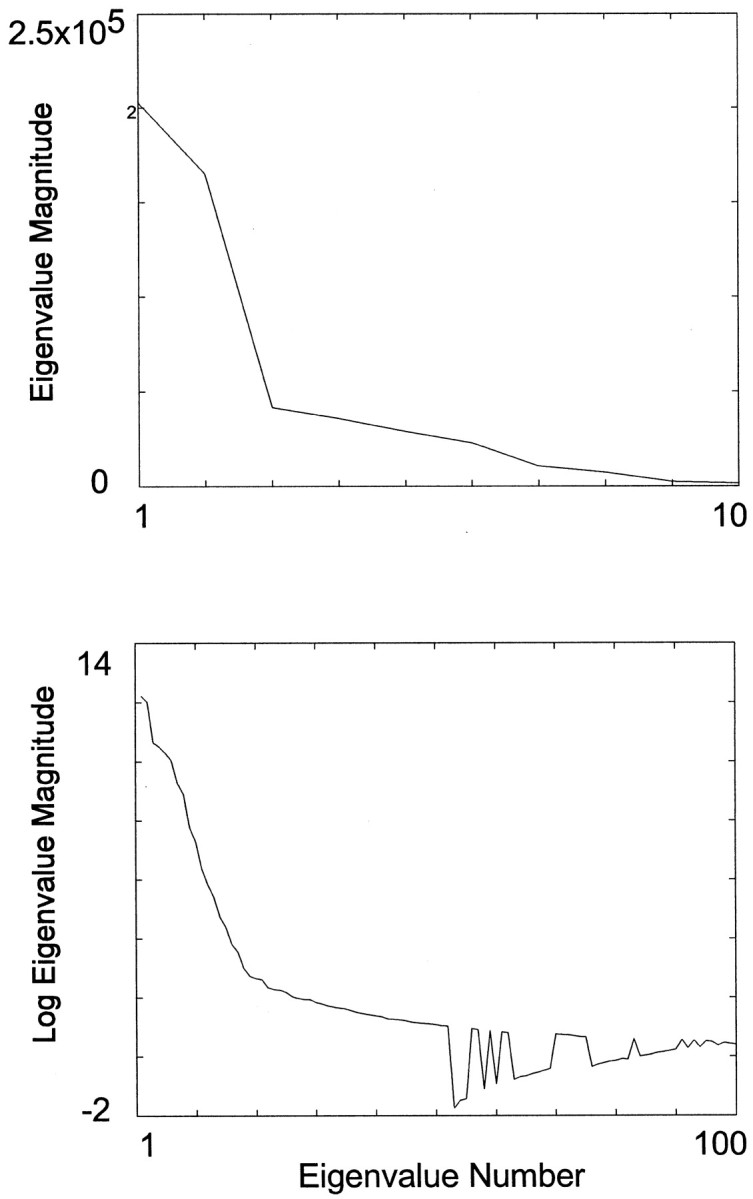
Magnitude of the eigenvalues versus eigenvalue number for a single subject on 1 d (1200 movements). The same data is plotted for the first 10 components on a linear scale and for all 100 components on a log scale.
Because of the high dimensionality of the space of possible movements, there is no single measure that describes the similarity between components from different subjects. In fact, we are most interested in the similarity between the space of components from each subject. To investigate this, we can examine the ability for the components from one subject to describe movements from a different subject. Low error for a small number of components indicates similar approximation abilities and a similar space of components. Figure2B approximates the movement error for all subjects using the components from subject 1, thereby demonstrating the similarity between component spaces from different subjects and at different times. The actual components may be very different, because there may be shuffling or varying linear combinations of the first few components.
Figure 2C shows that inclusion of three additional dimensions of elbow position at each time point does not significantly increase the required dimensionality. This implies that the same small set of components can be used to describe both hand and elbow movement, and that the hand and elbow trajectories are correlated for this task. Figure 2D shows similar results for the approximation error using a pen tablet instead of the manipulandum to record movements.
Figure 4 shows a typical trial block from subject 5, as well as approximations of each trial movement using from one to five components. As the iterated practice progresses, the actual subject movements change to shapes that are better approximated by a smaller number of components. Note that the first component does not contribute significantly to this particular block of trial movements.
Fig. 4.

Approximation of trajectories within a single trial block using from one to five components. The top rowshows a single iterated block of 20 trials. Components are calculated from the movements of the entire day, and the second throughsixth rows show approximation of the movement trajectories using progressively fewer components. Note that the similarity between the actual movement and the approximations increases as the iteration continues.
On average, the approximation error en2 for the first few components decreases with iterated practice, indicating that these components represent progressively more of the data variance and that the movement converges toward a superposition of fewer and fewer components. The effect is shown for all subjects in Figure5A. The figure shows the percentage of variance accounted for, averaged over blocks of 20 trials (400 movements) on multiple days for each subject. Here, principal components are computed separately within each block of 400 movements to allow comparison of the average errors. In all cases, the combination of the first few components accounts for progressively more of the variance. In some cases, although the percentage accounted for by the first five components does not change significantly, the movements converge so that the first 3–4 components contain a larger proportion of the variance than initially. Also note that the first component may actually lose power in some series, but that this power is recovered in the second component as the set of movements “rotates” in the high-dimensional space toward the low-dimensional projection.
Fig. 5.

Change in approximation error with iterated practice for each subject. A, From top tobottom in each figure, the lines indicate the decrease in error with from one to five components, showing that the first few components account for progressively increasing percentages of the total movement variance. The top line shows the decrease in error with approximation using one component, thesecond line shows the decrease for two components, and so on. The error is shown normalized to the total movement variance. Each plot is averaged over 20 movement blocks. Note that, for subject 1, the first two components combined account for an increasing percentage of the total variance, although the first component percentage decreases.B, Lack of convergence when the same target is presented at each trial (Subject 2). This shows that convergence is not simply an effect of repeated practice.
Convergence is not simply an effect of practice, because Figure5B shows that repeated presentation of the same target does not lead to this phenomenon. Figure 6shows the average convergence behavior for all subjects for 2 and 3 components, with error bars indicating 1 SD from the between-subject mean. Although the slope of the average curve is not significant, the average downward trend is significant (p < 0.01). Figure 7 shows the distance from each movement in an iterated sequence to the final movement in the block. Although the progression toward this final movement is steady, it does not stabilize at any time. If movements progressed toward a particular set of movements, we would expect that at least in some cases this curve would approach zero at a low iteration number and then remain near zero. This pattern is not seen. Figures 6 and 7 show that although iterated practice converges toward a linear subspace, it does not converge to a fixed set of preferred trajectories such as those in a memory-based controller (Atkeson, 1989, 1990).
Fig. 6.
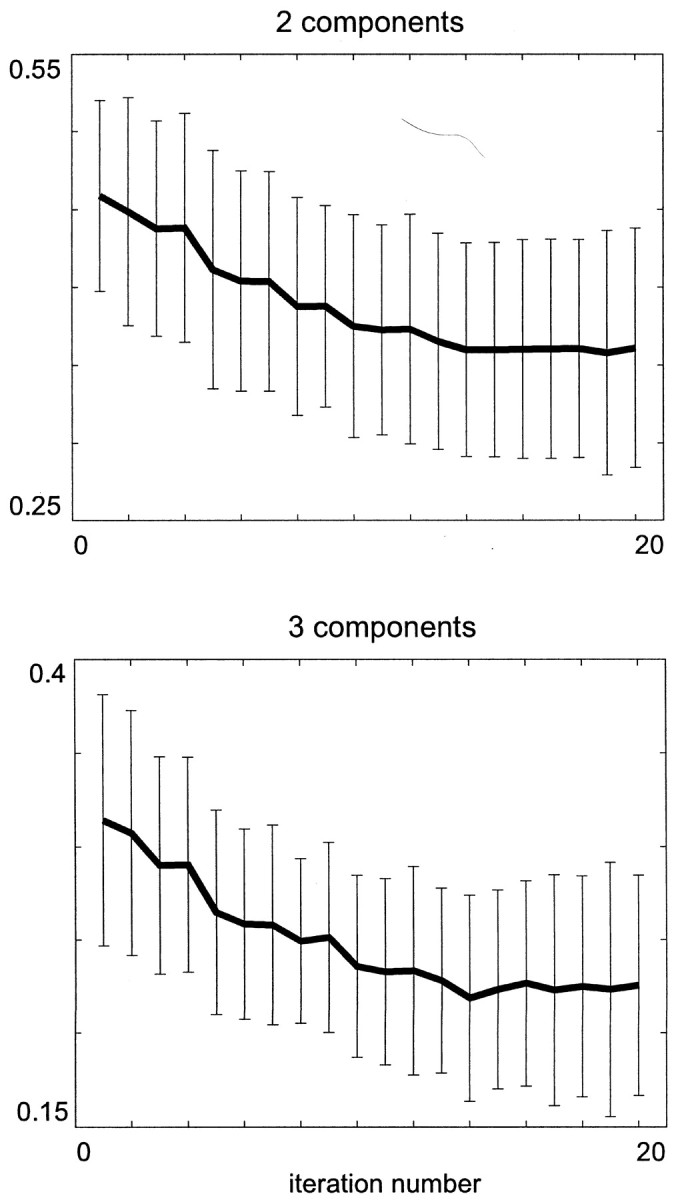
Average across subjects of the decrease in approximation error with increasing iteration, using two and three components. Error is averaged over blocks of 400 trials for eight subjects on multiple days. Error bars indicate 1 SD of the between-subject variation for a single iteration number.
Fig. 7.

Average sum squared distance from the final movement in a block, by iteration number. Distance is averaged over blocks of 400 trials for 8 subjects on multiple days. Error bars indicate 1 SD of the between-subject variation for a single iteration number. Note that the curve shows steady slow progression toward the final movement, but it does not show evidence of stabilizing near the final curve.
DISCUSSION
We have shown that the trajectories followed by the hand while performing smooth planar movements can be described by a small number of principal components. These components satisfy an approximate power law relating speed and curvature. The approximation by a small number of components is accentuated with iterated practice, for which an increasing fraction of the variance of the movements can be described by a decreasing number of components. These results therefore show that arm movement trajectories provide a further example of low dimensionality in human motor behavior.
The methods used here operate within the Cartesian coordinate system. Although there is some evidence to suggest that visual–motor tasks are in fact planned in Cartesian coordinates (Morasso, 1981; Wolpert et al., 1995), our results do not address this question, and the same type of analysis could have been performed in joint or body-centered polar coordinates.
Trajectories with a small number of components are a property of certain classes of very smooth movements. For example, trajectories that are generated by splines, Fourier series, or from linearly filtered noise will all have low dimensionality. In particular, a second-order mechanical system with mass, stiffness, and damping may generate low-dimensional trajectories when driven by white noise. We now provide a mathematical analysis of iterated practice for linear systems, followed by a simulation of iterated practice for a two-joint planar arm with a smooth equilibrium point controller (Feldman, 1974;Bizzi et al., 1984).
Consider a system in which the mapping from one movement to the next can be described by a linear system A: m⃗k →m⃗k+1. A represents the entire process of seeing the target path generated from the previous movement, planning the next trajectory, sending motor commands to the muscles to execute the trajectory, and then performing the next movement. If the initial target movement is m⃗0, the k th movement in the iterated practice series ism⃗k = Akm⃗0. (There is an additional effect from rescaling of the movements to be at approximately the same size. We will ignore this because it does not affect the conclusions.) This process is known to converge toward the first eigenvector of the matrix A (Golub and Van Loan, 1983). If we perform a principal components decomposition m⃗k = ∑iai(k)c⃗i at each step, then the change in each component for step k is given by:
| Equation 9 |
where λi is the i th eigenvalue of A, and ci is its i th eigenvector. This means that if we order the components from largest to smallest with λ1 > λ2 > … , then during iterated practice the higher-numbered components will decrease fastest so that the lower components a1, a2, and so on account for an increasing percentage of the data variance. This effect is greatest for low-dimensional A with rapidly decreasing eigenvalues λi. Therefore, the property of convergence toward a low-dimensional representation can be explained if the combination of movement controller and musculoskeletal mechanics behaves as a low-dimensional linear system.
This raises the question of whether the musculoskeletal mechanics alone can account for the data. The mechanics are not able to perform the required translation from the visual representation of a path (which has no timing or velocity information) into the temporal description of a trajectory, but the mechanics can act as a temporal smoothing operator that reduces the apparent dimensionality. However, we now show that simulation of a two-joint mechanical arm with equilibrium point control is not sufficient by itself to explain the convergence results. For the simulation we used standard equations for the dynamics of a two-joint planar robot arm (for example, see McCarthy, 1986) with Euler integration. Mechanical parameters were taken from Amis et al. (1979), and an equilibrium-point controller was used to map from a desired trajectory θ̂ at each joint (in joint coordinates) into torques according to τ = K(θ̂ − θ) − Bθ˙ (Flash, 1987). Stiffness K and damping B coefficients were set as constant at 2 Nm/rad and 0.4 Nm · rad−1 · sec−1, respectively, based approximately on human measurements from Katayama and Kawato (1992) and Bennett et al. (1992). Initial target trajectories were generated from Equations 1 and 2, and 20 blocks of iterated trials were simulated. At each iteration, the target for the next movement was the average of the two previous trajectories (including timing information), because the mechanical system could otherwise not make use of the visual representation of a path.
Figure 8 shows the first 10 iteration trials, and Figure 9 shows the decrease in approximation error for 1–5 components as a function of trial number. Although the general features of increasing smoothness and decreasing number of components are present, the simulated trajectories in Figure 8 do not always converge and frequently appear to jump between different alternatives. In particular, note the increase in error on the last two trials in Figure 9. This occurs despite the apparently low variability in the trajectories shown in Figure 8because of the fact that the final trajectories in each block of trials are poorly represented by the set of principal components computed for the entire set of movements. This effect was seen on multiple simulations and suggests that although the movements are converging toward a low-dimensional space, it is not the same low-dimensional space as that computed for the initial movements. This behavior differs from the human data and the analysis of linear systems discussed above, for which convergence is expected to be approximately monotonic, as in Equation 9. The simulation results therefore suggest that the convergence behavior cannot be explained solely on the basis of the mechanical system with an equilibrium point controller. Therefore, the smoothness and low dimensionality may be attributable to the combination of an internal movement controller and the musculoskeletal mechanical system.
Fig. 8.

Example of iterated practice for simulation of an equilibrium-point controlled two-joint planar mechanical arm, shown as in Figure 1. Each row of the figure shows the simulated hand movements for a block of 20 trials.
Fig. 9.

Change in approximation error with iterated practice for simulation of equilibrium-point controlled two-joint planar mechanical arm, plotted as in Figure 5. From top tobottom in each figure, the lines indicate the decrease in error with from one to five components, averaged over 20 movement blocks.
In conclusion, the human data shows that the final resulting movements are a set of trajectories of low dimensionality relative to the 100-dimensional complete set of possibilities. Similar results hold for handwriting as for arm movements, and when elbow movements are measured they are found to correlate with the hand movements in such a way that the dimensionality does not significantly increase. Simulation results suggest that the low dimensionality and convergence of the trajectories are attributable to a combination of the movement controller and the musculoskeletal system, but further research will be needed to determine the relative contribution of each.
We emphasize that our results provide only a description of the movements, and therefore they do not indicate how these trajectories are generated. Furthermore, our results do not indicate whether this phenomenon represents an intended behavior of the system or merely a necessary but unintended consequence of the mechanics. Nevertheless, it is possible that the low dimensionality may allow the controller to use a simplified strategy to reduce the storage and computational requirements needed to express variability within the set of curved hand trajectories.
Footnotes
This research and Dr. Bizzi's laboratory were supported by National Institutes of Health Grant NS09343 and ONR Grant N00014-95-1-0445 to Dr. Emilio Bizzi. I was supported during part of this research by a McDonnell–Pew postdoctoral fellowship. I thank Emilio Bizzi, Simon Giszter, Francesca Gandolfo, Brian Benda, and Margo Cantor for discussions and assistance with these experiments. I also acknowledge the diligence and insight of the anonymous reviewers who contributed significantly to revision of this manuscript.
Correspondence should be addressed to Terence D. Sanger, Department of Movement Disorders, Toronto Western Hospital, MP-11, 399 Bathurst Street, Toronto, Ontario M5T 2S8, Canada. E-mail: tds@ai.mit.edu.
REFERENCES
- 1.Alexandrov A, Frolov A, Massion J. Axial synergies during human upper trunk bending. Exp Brain Res. 1998;118:210–220. doi: 10.1007/s002210050274. [DOI] [PubMed] [Google Scholar]
- 2.Amis AA, Dowson D, Wright V. Muscle strengths and musculoskeletal geometry of the upper limb. Eng Med. 1979;8:41–48. [Google Scholar]
- 3.Atkeson C (1990) Comparison of memory-based motor learning with other neural network approaches.Abstracts Neural Networks for Computing Conference, April.Snowbird, UT.
- 4.Atkeson CG. Learning arm kinematics and dynamics. Annu Rev Neurosci. 1989;12:157–183. doi: 10.1146/annurev.ne.12.030189.001105. [DOI] [PubMed] [Google Scholar]
- 5.Bennett DJ, Hollerbach JM, Xu Y, Hunter IW. Time-varying stiffness of human elbow joint during cyclic voluntary movement. Exp Brain Res. 1992;88:433–442. doi: 10.1007/BF02259118. [DOI] [PubMed] [Google Scholar]
- 6.Bernstein N. The coordination and regulation of movements. Pergamon; Oxford: 1967. [Google Scholar]
- 7.Bizzi E, Accornero N, Chapple W, Hogan N. Posture control and trajectory formation during arm movement. J Neurosci. 1984;4:2738–2744. doi: 10.1523/JNEUROSCI.04-11-02738.1984. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 8.Bizzi E, Mussa-Ivaldi FA, Giszter S. Computations underlying the execution of movement: a biological perspective. Science. 1991;253:287–291. doi: 10.1126/science.1857964. [DOI] [PubMed] [Google Scholar]
- 9.Borghese NA, Bianchi L, Lacquaniti F. Kinematic determinants of human locomotion. J Physiol. 1996;494:863–879. doi: 10.1113/jphysiol.1996.sp021539. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 10.d'Avella A, Bizzi E. Low dimensionality of supraspinally induced force fields. Proc Natl Acad Sci USA. 1998;95:7711–7714. doi: 10.1073/pnas.95.13.7711. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 11.Fayé IC. MS thesis. MIT Department of Mechanical Engineering; 1986. An impedance controlled manipulandum for human movement studies. [Google Scholar]
- 12.Feldman AG. Change in the length of the muscle as a consequence of a shift in equilibrium in the muscle-load system. Biophysics. 1974;19:544–548. [Google Scholar]
- 13.Flash T. The control of hand equilibrium trajectories in multi-joint arm movements. Biol Cybern. 1987;57:257–274. doi: 10.1007/BF00338819. [DOI] [PubMed] [Google Scholar]
- 14.Flash T, Hogan N. The coordination of arm movements: an experimentally confirmed mathematical model. J Neurosci. 1985;5:1688–1703. doi: 10.1523/JNEUROSCI.05-07-01688.1985. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 15.Golub GH, Van Loan CF. Matrix computations. North Oxford Academic; Oxford: 1983. [Google Scholar]
- 16.Gottlieb GL, Song Q, Hong D-A, Almeida GL, Corcos D. Coordinating movement at two joints: a principle of linear covariance. J Neurophysiol. 1996;75:1760–1764. doi: 10.1152/jn.1996.75.4.1760. [DOI] [PubMed] [Google Scholar]
- 17.Hogan N. An organizing principle for a class of voluntary movements. J Neurosci. 1984;4:2745–2754. doi: 10.1523/JNEUROSCI.04-11-02745.1984. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 18.Katayama M and Kawato M (1992) Virtual trajectory and stiffness ellipse during multi-joint arm movement predicted by neural inverse models. ATR Auditory and Visual Perception Research Laboratories Technical Report TR-A-0144.
- 19.Lacquaniti F, Terzuolo C, Viviani P. The law relating the kinematic and figural aspects of drawing movements. Acta Psychol (Amst) 1983;54:115–130. doi: 10.1016/0001-6918(83)90027-6. [DOI] [PubMed] [Google Scholar]
- 20.Loslever P, Laassel E, Angue JC. Combined statistical study of joint angles and ground reaction forces using component and multiple correspondence analysis. IEEE Trans Biomed Eng. 1994;41:1160–1167. doi: 10.1109/10.335864. [DOI] [PubMed] [Google Scholar]
- 21.McCarthy JM. Kinematics of Robot Manipulators. Cambridge, MA, MIT; 1986. [Google Scholar]
- 22.Morasso P. Spatial control of arm movements. Exp Brain Res. 1981;42:223–227. doi: 10.1007/BF00236911. [DOI] [PubMed] [Google Scholar]
- 23.Mussa-Ivaldi FA, Giszter SF, Bizzi E. Linear combinations of primitives in vertebrate motor control. Proc Natl Acad Sci USA. 1994;91:7534–7538. doi: 10.1073/pnas.91.16.7534. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 24.Olney SJ, Griffin MP, McBride ID. Multivariate examination of data from gait analysis of persons with stroke. Phys Ther. 1998;78:814–828. doi: 10.1093/ptj/78.8.814. [DOI] [PubMed] [Google Scholar]
- 25.Ramsay JO, Munhall KG, Gracco VL, Ostry DJ. Functional data analyses of lip motion. J Acoust Soc Am. 1996;99:3718–3727. doi: 10.1121/1.414986. [DOI] [PubMed] [Google Scholar]
- 26.Santello M, Soechting JF. Matching object size by controlling finger span and hand shape. Somatosens Mot Res. 1997;14:203–212. doi: 10.1080/08990229771060. [DOI] [PubMed] [Google Scholar]
- 27.Santello M, Flanders M, Soechting JF. Postural hand synergies for tool use. J Neurosci. 1998;18:10105–10115. doi: 10.1523/JNEUROSCI.18-23-10105.1998. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 28.Sergio LE, Ostry DJ. Coordination of multiple muscles in two degree of freedom elbow movements. Exp Brain Res. 1995;105:123–137. doi: 10.1007/BF00242188. [DOI] [PubMed] [Google Scholar]
- 29.Soechting JF, Flanders M. Flexibility and repeatability of finger movements during typing: Analysis of multiple degrees of freedom. J Comput Neurosci. 1997;4:29–46. doi: 10.1023/a:1008812426305. [DOI] [PubMed] [Google Scholar]
- 30.Uno Y, Kawato M, Suzuki R. Formation and control of optimal trajectory in human multijoint arm movement. Biol Cybern. 1989;61:89–101. doi: 10.1007/BF00204593. [DOI] [PubMed] [Google Scholar]
- 31.Viviani P, Terzuolo C. Trajectory determines movement dynamics. Neuroscience. 1982;7:431–437. doi: 10.1016/0306-4522(82)90277-9. [DOI] [PubMed] [Google Scholar]
- 32.Weijs WA, Sugimura T, van Ruijven LJ. Motor coordination in a multi-muscle system as revealed by principal components analysis of electromyographic variation. Exp Brain Res. 1999;127:233–243. doi: 10.1007/s002210050793. [DOI] [PubMed] [Google Scholar]
- 33.Wolpert DM, Ghahramani Z, Jordan MI. Are arm trajectories planned in kinematic or dynamic coordinates? An adaptation study. Exp Brain Res. 1995;103:460–470. doi: 10.1007/BF00241505. [DOI] [PubMed] [Google Scholar]