

Abstract
In this paper we discuss three results. The first two concern general sets of positive reach: we first characterize the reach of a closed set by means of a bound on the metric distortion between the distance measured in the ambient Euclidean space and the shortest path distance measured in the set. Secondly, we prove that the intersection of a ball with radius less than the reach with the set is geodesically convex, meaning that the shortest path between any two points in the intersection lies itself in the intersection. For our third result we focus on manifolds with positive reach and give a bound on the angle between tangent spaces at two different points in terms of the reach and the distance between the two points.
Keywords: Reach, Metric distortion, Manifolds, Convexity
Introduction
Metric distortion quantifies the maximum ratio between geodesic and Euclidean distances for pairs of points in a set . The reach of , defined by Federer (1959), is the infimum of distances between points in and points in its medial axis, the points in ambient space for which there does not exist a unique closest point in . Both reach and metric distortion are central concepts in manifold (re-)construction and have been used to characterize the size of topological features. Amenta and Bern (1999) introduced a local version of the reach in order to give conditions for homeomorphic surface reconstruction and this criterion has been used in many works aiming at topologically faithful reconstruction. See the seminal paper of Niyogi et al. (2008) and Dey (2006) for more context and references. A direct relation between the reach and the size of topological features is simply illustrated by the fact that the intersection of a set with reach with a ball of radius less than r has reach at least r and is contractible (Attali and Lieutier 2015). In a certain way, metric distortion also characterizes the size of topological features. This is illustrated by the fact that a compact subset of with metric distortion less than is simply connected [section 1.14 in Gromov et al. (2007), see also appendix A by P. Pansu where sets with a given metric distortion are called quasi convex sets].
In the first part of this paper, we provide tight bounds on metric distortion for sets of positive reach and, in a second part, we consider submanifolds of and bound the angle between tangent spaces at different points. Whenever we mention manifolds we shall tacitly assume that it is embedded in Euclidean space. Previous versions of the metric distortion result, restricted to the manifold setting can be found in Niyogi et al. (2008). A significant amount of attention has gone to tangent space variation, see Belkin et al. (2009), Boissonnat et al. (2013), Boissonnat and Ghosh (2010), Cheng et al. (2005), Dey (2006), Dey et al. (2008) and Niyogi et al. (2008) to name but a few.
Our paper improves on these bounds, extends the results beyond the case of smooth manifolds and offers new insights and results. These results have immediate algorithmic consequences by, on one hand, improving the sampling conditions under which known reconstruction algorithms are valid and, on the other hand, allowing us to extend the algorithms to the class of manifolds of positive reach, which is much larger than the usually considered class of manifolds. Indeed, the metric distortion and tangent variation bounds for manifolds presented in this paper in fact suffice to extend the triangulation result of manifolds embedded in Euclidean space given in Boissonnat et al. (2018) to arbitrary manifolds with positive reach, albeit with slightly worse constants. The results of the papers on manifold reconstruction cited above generalize likewise to general manifolds of positive reach. The constants that appear in the conditions that guarantee correctness of the papers above can also be improved in the case using the results presented here.
Overview of results For metric distortion, we extend and tighten the previously known results so much that our metric distortion result can be regarded as a completely new characterization of sets of positive reach. In particular, the standard manifold and smoothness assumptions are no longer necessary. Based on our new characterization of the reach by metric distortion, we can prove that the intersection of a set of positive reach with a ball with radius less than the reach is geodesically convex. This result is a far reaching extension of a result of Boissonnat and Oudot (2003) that has attracted significant attention, stating that, for smooth surfaces, the intersection is a pseudo-ball.
To study tangent variation along manifolds, we will consider two different settings, namely the setting, for which the bounds are tight, and the setting, where we achieve slightly weaker bounds.
The exposition for manifolds is based on differential geometry and is a consequence of combining the work of Niyogi et al. (2008), and the two dimensional analysis of Attali et al. (2007) with some observations concerning the reach. We would like to stress that some effort went into simplifying the exposition, in particular the part of Niyogi et al. (2008) concerning the second fundamental form.
The second class of manifolds we consider consists of closed manifolds embedded in . We restrict ourselves to manifolds because it is known that closed manifolds have positive reach if and only if they are , see Federer (1959, Remarks 4.20 and 4.21) and Scholtes (2013) for a history of this result. Here we do not rely on differential geometry apart from simple concepts such as the tangent space. In fact most proofs can be understood in terms of simple Euclidean geometry. Moreover our proofs are very pictorial. Although the bounds we attain are slightly weaker than the ones we attain using differential geometry, we should note that we have sometimes simplified the exposition at the cost of weakening the bound.
We also prove that the intersection of a manifold with a ball of radius less than the reach of the manifold is a topological ball. This result is a generalization of previous results. Note that geodesic convexity of a subset does not imply that that the subset is topologically trivial, as the simple example of the circle shows. A sketch of a proof of the result in the case has been given by Boissonnat and Cazals (2001). Attali and Lieutier (2015) proved that the intersection of a set of positive reach and ball of radius less than the reach is contractible. Our topological ball result is stronger, but in a more restricted setting.
Outline Section 2 gives the result on metric distortion and geodesic convexity for general sets of positive reach. The third section discusses the variation of tangent spaces, firstly for manifolds and then manifolds. In the final section we reproof some of the results of the first section using differential geometrical techniques.
Metric distortion and geodesic convexity
In this section we study distortion and geodesic convexity for general sets of positive reach. We will revisit this topic in Sect. 4 from a smooth viewpoint.
For a closed set , denotes the geodesic distance in , i.e. is the infimum of lengths of paths in between a and b. If there is at least one path between a and b with finite length, then it is known that a minimizing geodesic, i.e. a path with minimal length connecting a to b exists (see the second paragraph of part III, section 1: “Die Existenz geodätischer Bogen in metrischen Räumen” in Menger 1930).
The next theorem can be read as an alternate definition of the reach, based on metric distortion. Observe that for fixed , the function is decreasing. Note that is precisely the (geodesic) distance between points a and b on a circle of radius r.
Theorem 1
If is a closed set, then
where the over the empty set is 0.
The proof of this theorem relies on the the following lemma:
Lemma 3
Let be a closed set with reach . For any such that one has
The proof of the lemma is technical and takes the remainder of this section. We’ll now prove Theorem 1.
Proof of Theorem 1
Lemma 3 states that if then
This gives us
If , i.e. if is convex, then for all and all r, we have that and the theorem holds trivially. We assume now that the medial axis is non empty, i.e. . Consider . Then by definition of the reach, there exists in the medial axis of and such that . If for at least one of such pairs one has then and:
If not, consider a path in between a and b: . Because lies outside the open ball , its projection on the closed ball cannot increase lengths. It follows that, for any :
which gives, for any ,
and therefore
Since this holds for any we get:
We now remind ourselves that a set is geodesically convex if the minimizing geodesic between any two points of the set is itself contained in the set. With this definition we can give the following result:
Corollary 1
Let be a closed set with positive reach . Then, for any and any , if is the closed ball centered at x with radius , then is geodesically convex in .
Proof
First it follows from the theorem that if , then which means that there exists a path of finite length in between a and b. From Menger (1930) there is at least one minimizing geodesic in between a and b.
For a contradiction assume that such a geodesic goes outside . In other words there is at least one non empty open interval such that and . But then, since the projection on the ball reduces lengths, one has:
a contradiction with the theorem.
We emphasize that the question of convexity has not been considered before.
Projection of the middle point
Sections 2.1 and 2.2 are devoted to the proof of Lemma 3, which is the technical part of the proof of Theorem 1.
For a closed set with positive reach and a point with , denotes the projection of m on as depicted on Fig. 1 on the left.
Fig. 1.

On the left the projection is contained in the disk of center m and radius . The notation used in the proof of Lemma 1 is also added. From the right figure it is easy to deduce that
Lemma 1
Let be a closed set with reach . For such that and one has with
The disk of center m and radius appears in green in Fig. 1 left and right.
Proof
We shall now use a consequence of Theorem 4.8 of Federer (1959). In the following section we shall discuss this result for the manifold setting, where it generalizes the tubular neighbourhood results for manifolds from differential geometry and differential topology. For the moment we restrict ourselves to the following: If claim (12) in Theorem 4.8 of Federer (1959) gives us:
which means that for :
is closer to than both to a and to b (see Fig. 1).
Without loss of generality we assume that . We denote and want to prove that .
In the plane spanned by we consider the following frame , where m denotes the origin, is a unit vector orthogonal to and such that .
For some , the coordinates of in the frame are . The coordinate of a are and the coordinates of are, as shown in Fig. 1, Since is closer to than to a, one has
This is a degree 2 inequality in . One gets, for any , if ,
with For one has . Therefore: and since is continuous, one has:
also, when one has and Since , one finds that .
The following simple geometric Lemma is used in the next section.
Lemma 2
Consider a circle of radius r and two points with Define the middle point and consider a point p such that Denote the shortest of the arcs of the circle in bounded by a and b. Define as the unique point in such that , then we have and .
Proof
Since , one has and the quotient is well defined. Because , p belongs to both disks with radius r with a and b on their boundary. This can be expressed through angles comparison as If we denote one has
Similarly,
so that
But gives
and we get and .
Metric distortion
In this section we establish an upper bound on geodesic lengths through the iterative construction of a sequence of paths.
Lemma 3
Let be a closed set with reach . For any such that one has
Proof
We build two sequences of PL-functions (see Fig. 2). For , and are defined as follows.
Fig. 2.

Left: . Right:
First we define Denote the middle point of [a, b]. Since , the point is well defined. Secondly, we define
as depicted in Fig. 2 on the left.
From Lemma 1, one has and thus
We also fix a circle in with radius r and we consider such that and and we define Denote by the shortest of the two arcs of bounded by and as constructed in Lemma 2 i.e. such that as shown in Fig. 2 on the right, and define
Applying Lemma 2 we get , and
For , and are PL functions with intervals. For , , , are defined by applying to each of the segments of and the same subdivision process used when defining and .
If k is even we set and .
If k is odd define:
Note that corresponds to m defined above.
Let be such that:
Figure 2 left shows the curves and in blue and yellow respectively.
Applying Lemma 2, since by induction,
we get that for and :
and therefore:
| 1 |
We study now the behavior of the sequence . Define and . Further define as
i.e. half the max of lengths of all segments of and . We make the following assertion:
Claim
| 2 |
Proof of the claim
Thanks to the definitions of and , one has for
| 3 |
Moreover for any ,
| 4 |
| 5 |
Since
(5) allows the induction
We get that the sequence is decreasing and . Replacing and iterating in (5) gives
Since we see that decreases faster than a geometric sequence, in particular:
| 6 |
Since for any and , and the curves , (projections of on ) are well defined, with , and .
Claim (8) in Theorem 4.8 of Federer (1959) states that for the restriction of to the -tubular neighbourhood is -Lipschitz. This together with (1) above gives us an upper bound on the lengths of curves :
This together with (2) yields .
Variation of tangent spaces
In this section we shall bound the variation of tangent spaces in the setting, and then generalize to the setting. For this generalization we need a topological result, which will be presented in Sect. 3.2.
Bounds for submanifolds
We shall be using the following result, Theorem 4.8(12) of Federer (1959):
Theorem 2
(Federer’s tubular neighbourhoods) Consider a manifold of positive reach and a non-negative real number r smaller than the reach. Let , be the ball of radius r centred at p in the normal space . For every point , .
The fact that such a tubular neighbourhood exists is non-trivial, even if we take . From Theorem 2 we immediately see that:
Corollary 2
Let be a submanifold of and . Any open ball B(c, r) that is tangent to at p and whose radius r satisfies does not intersect .
Proof
Let . Suppose that the intersection of and the open ball is not empty, then contradicting Federer’s tubular neighbourhood theorem. Now suppose that the open ball of radius contains a point q. Then there exists an and a ball of radius tangent to at p such that q lies inside this ball. This again gives a contradiction.
Here we prove the main result for manifolds. Our exposition is the result of straightforwardly combining the work of Niyogi et al. (2008), and the two dimensional analysis of Attali et al. (2007) with some observations concerning the reach.
We start with the following simple observation:
Lemma 4
Let be a geodesic parametrized according to arc length on , then , where we use Newton’s notation, that is we write for the second derivative of with respect to t.
Proof
Because is a geodesic, is normal to at . Now consider the sphere of radius tangent to at , whose centre lies on the line . If now were larger than , the geodesic would enter the tangent sphere, which would contradict Corollary 2.
Note that is the normal curvature, because is a geodesic. Using the terminology of Niyogi et al. (2008, Section 6), Lemma 4 can also be formulated as follows: bounds the principal curvatures in the normal direction , for any unit normal vector . In particular, also bounds the principal curvatures if has codimension 1.
We now have the following, which is a straightforward extension of an observation in Attali et al. (2007) to general dimension:
Lemma 5
Let be a geodesic parametrized according to arc length, with on , then:
Proof
Because is parametrized according to arc length and can be seen as a curve on the sphere . Moreover can be seen as tangent to this sphere. The angle between two tangent vectors and equals the geodesic distance on the sphere. The geodesic distance between any two points is smaller or equal to the length of any curve connecting these points, and is such a curve. We therefore have
| 7 |
where we used Lemma 4.
We can now turn our attention to the variation of tangent spaces. Here we mainly follow Niyogi et al. (2008), but use one useful observation of Attali et al. (2007). We shall be using the second fundamental form, which we assume the reader to be familiar with. We refer to do Carmo (1992) as a standard reference.
The second fundamental form  has the geometric interpretation of the normal part of the covariant derivative, where we assume now that u, v are vector fields. In particular
has the geometric interpretation of the normal part of the covariant derivative, where we assume now that u, v are vector fields. In particular  , where is the connection in the ambient space, in this case Euclidean space, and the connection with respect to the induced metric on the manifold . The second fundamental form
, where is the connection in the ambient space, in this case Euclidean space, and the connection with respect to the induced metric on the manifold . The second fundamental form  is a symmetric bi-linear form, see for example Section 6.2 of do Carmo (1992) for a proof. This means that we only need to consider vectors in the tangent space and not vector fields, when we consider
is a symmetric bi-linear form, see for example Section 6.2 of do Carmo (1992) for a proof. This means that we only need to consider vectors in the tangent space and not vector fields, when we consider  .
.
We can now restrict our attention to u, v lying on the unit sphere (of codimension one in ) in the tangent space and ask for which of these vectors  is maximized. Let us assume that the
is maximized. Let us assume that the  for which the maximum1 is attained lies in the direction of where is assumed to have unit length.
for which the maximum1 is attained lies in the direction of where is assumed to have unit length.
We can now identify  , with a symmetric matrix. Because of this
, with a symmetric matrix. Because of this  , with , attains its maximum for u, v both lying in the direction of the unit eigenvector w of
, with , attains its maximum for u, v both lying in the direction of the unit eigenvector w of  with the largest2 eigenvalue. In other words the maximum is assumed for . Let us now consider a geodesic on parametrized by arclength such that and . Now, because is a geodesic and the ambient space is Euclidean,
with the largest2 eigenvalue. In other words the maximum is assumed for . Let us now consider a geodesic on parametrized by arclength such that and . Now, because is a geodesic and the ambient space is Euclidean,
Due to Lemma 4 and by definition of the maximum, we now see that  , for all u, v of length one.
, for all u, v of length one.
Having discussed the second fundamental form, we can give the following lemma:
Lemma 6
Let , then
Proof
Let be a geodesic connecting p and q, parametrized by arc length. We consider an arbitrary unit vector u and parallel transport this unit vector along , getting the unit vectors u(t) in the tangent spaces . The maximal angle between u(0) and , for all u bounds the angle between and . Now
where we used that u(t) is parallel and thus by definition . So using our discussion above . Now we note that, similarly to what we have seen in the proof of Lemma 5, u(t) can be seen as a curve on the sphere and thus .
This bound is tight as it is attained for a sphere.
Corollary 3
Proof
Lemma 6 gives
and Theorems 1 yields
The result now follows. Note that the statement holds trivially if .
With the bound on the angles between the tangent spaces it is not difficult to prove that the projection map onto the tangent space is locally a diffeomorphism, as has been done in Niyogi et al. (2008). Although the results were given in terms of the (global) reach to simplify the exposition, the results can be easily formulated in terms of the local feature size.
A topological result
We shall now give a full proof of a variant of a statement by Boissonnat and Cazals (2001, Proposition 12) in the more general setting:
Proposition 1
If B is a closed ball of radius strictly less than the reach that intersects a manifold , then is a topological ball. Here we include points (balls of dimension/radius 0).
Note that this result is not implied by Corollary 1, because subspaces can be geodesically convex without being topological disks, think for example of the equator of the sphere.
The proof uses some results from topology, namely variants of Milnor (1969, Theorem 3.2 and Theorem 3.1):
Lemma 7
Consider the distance function from c: restricted to . Let and and suppose that the set , consisting of all with , contains no critical points of (that is, no point q of where B(c, q) is tangent to ). Then is homeomorphic (if is ) to . Furthermore is a deformation retract of .
Proof
The key change compared to original statement by Milnor, which is in the setting, is the passing from a diffeomorphism to a homeomorphism. This lemma is true because of the following: The proof of Theorem 3.1 of Milnor (1969) mentions the assumption that the function (in this case ) is smooth, however in the proof relies on using gradient flow, that is solving a differential equation. Thanks to Picard–Lindelöf theorem, see Coddington and Levinson (1987, Theorem 3.1), we know that the initial value problem , where denotes the derivative with respect to time, has a unique continuous solution if g is Lipschitz. In the proof presented by Milnor, g is the gradient of a (Morse) function (in this case the distance function). This implies that it suffices that the gradient of the distance function is Lipschitz, or equivalently that the function itself is . Because the gradient flow is only continuous in this Lipschitz setting we find a homeomorphism in the setting, instead of the diffeomorphism as in the case.
Lemma 8
Let be the function on defined, as in Lemma 7, as the restriction to of . Assume that y is a global isolated minimum of and let be the second critical value of . Then for all , is a topological ball.
Proof
Due to Lemma 7, in particular the deformation retract, we have that is homeomorphic to , for all . This gives that is homeomorphic to the cone of with the point y as its tip. Because is a manifold with boundary and y does not lie on its boundary we have the following: Firstly, is a manifold and it can be triangulated, see Palais (1963, section 7) and Whitehead (1940) respectively, giving a triangulation of the cone by taking the join of each simplex in the triangulation of with y. We can now use the following definition and result from topology (Zeeman 1963, Chapter 3):
Definition 1
(Combinatorial manifold) A complex K is called a combinatorial n-manifold if the link (the boundary of the star) of each vertex is an -sphere or an -ball.
Lemma 9
(Zeeman 1963, Lemma 9 of Chapter 3) Suppose that . Then K is a combinatorial manifold if and only if is a PL-manifold.
Because is the link of y, is a sphere and a ball.
Proof of Proposition 1
Write r for the radius of B and c for its center. The result is trivial if c belongs to the closure of the medial axis of , because then the intersection is empty. Therefore assume that .
Let y be the (unique) point of closest to c. We denote by the closed ball centered at c with radius (see Fig. 3). By Corollary 2, the interior of does not intersect and . This means that the conditions of Lemma 8 are satisfied and is a topological ball for all , where is the second critical value of the distance function to c restricted to . In other words is the radius for which the ball centred on c is tangent to for the second time.
Fig. 3.

For the proof of Proposition 1
Let us now assume that there exists a point of such that where the ball is tangent to . Corollary 2 and the assumption that the radius of B is strictly less than the reach now gives that contains no points of in its interior. This cannot be, because y lies inside this ball, meaning no such point z can exist.
Bounds for submanifolds
We shall now give a bound on the angle between sufficiently close tangent spaces based on elementary arguments. Here we use elementary methods in the sense that we do not rely on differential geometry, although we will use the topological ball result. The bound we find here also encompasses the case, and thus holds for arbitrary manifolds of positive reach.
From manifold to tangent space and back
We start with the following lemma, which is due to Federer. It bounds the distance of a point to the tangent space at a nearby point . We include a proof for completeness.
Lemma 10
(Distance to tangent space, Theorem 4.8(7) of Federer (1959)) Let such that . We have
| 8 |
and
| 9 |
Proof
Write . Consider the plane H in which v, q and p lie. Let in addition , be the two disks in H that are tangent to at p and thus to with radius . Due to Lemma 2q cannot lie inside the interior of nor . Let us now extend the line [vq] and call the first intersection of this line with , and with , . We call the centres of and , and , and the angles . We find that , while
This gives us
using Taylor’s theorem.
Next lemma establishes the converse statement of the distance bounds in Lemma 10. It is an improved version of Lemma B.2 in Boissonnat et al. (2013). This result too can be traced back to Federer (1959), in a slightly different guise. Before we give the lemma we first introduce the following notation.
Definition 2
Let denote the ‘filled cylinder’ given by all points that project orthogonally onto a ball of radius in and whose distance to this ball is less than .
In the following lemma we prove for all points , such that is not too large, that a pre-image on , if it exists, under the projection to cannot be too far from . The existence of such a point on is proven below.
Lemma 11
(Distance to Manifold) Suppose that and . Let be the inverse of the (restricted) projection from to of v, if it exists. Then
Remark 1
It follows immediately that , with
| 10 |
for any . This cylinder is indicated in green in Fig. 4. Let denote the subset of that projects orthogonally onto the open ball of radius in and lies a distance away. We also see that and that . We write
Fig. 4.
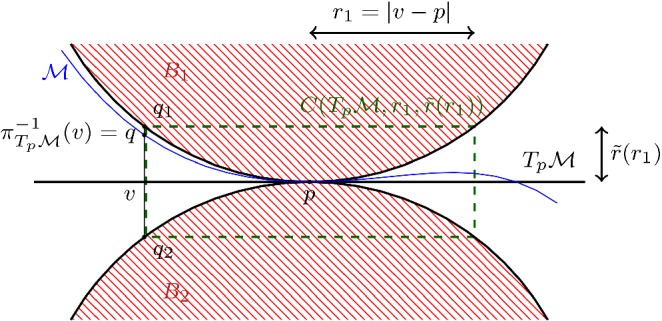
The set of all tangent balls to the tangent space of radius bounds the region in which can lie. Here we depict the 2 dimensional analogue
The angle bound
This section revolves around the following observation: If roughly the distance between p and q, there is a significant part of that is contained in the intersection , where we abbreviated to . In particular any line segment, whose length is denoted by , connecting two points in is contained in both and . If this line segment is long, the angle with both and is small. This bounds the angle between and , see Fig. 5.
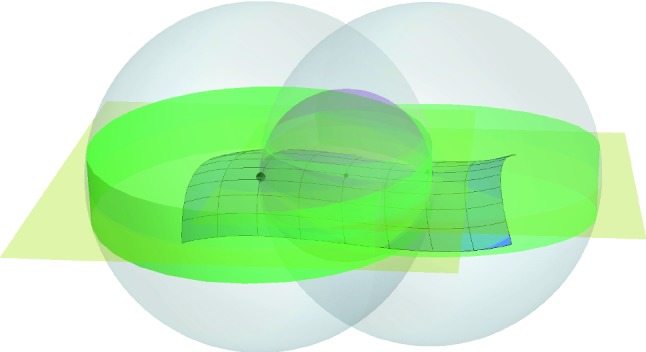
Fig. 5.

The tangent spaces and are drawn in yellow. The cylinders and are indicated in green. The red line segment lies in both cylinders and therefore its angle with both and is small (color figure online)
We start with the following simple observation:
Remark 2
Let [ab] be a line segment with length that is contained in . Then the angle between [ab] and is bounded by (Fig. 6).
Fig. 6.
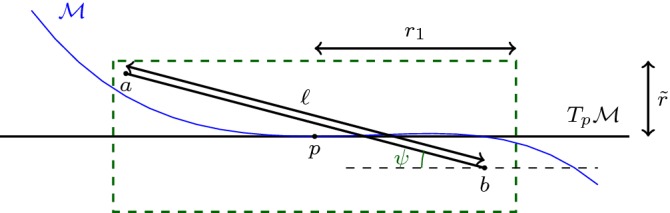
An illustration of the notation used in Remark 2
We now need the following corollary of Proposition 1:
Corollary 4
We have:
For any ball B(p, r) of radius centred at , is a topological ball.
For every , is contained in a set homeomorphic to , this homeomorphism is a projection, which is denoted by and indicated in Fig. 8 in green.
There exists an isotopy from the image of under the homeomorphism from to the sphere that is the boundary of the open ball of radius r in .
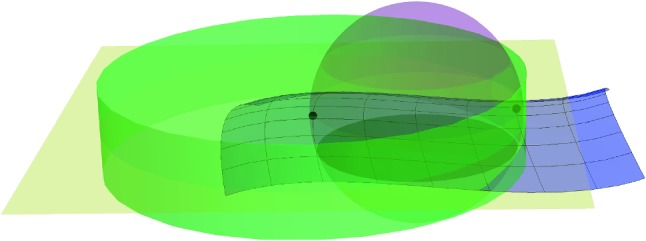
Fig. 8.

The manifold in a neighbourhood of the point p lies in region bounded by all tangent balls of at p, indicated by the red balls. The projection on the boundary of is indicated in green. The projection onto the tangent page is indicated in cyan (color figure online)
Proof
The first observation is a straightforward consequence of Proposition 1 and the definition of the reach.
We have that , so thanks to Remark 1 we see that
Because does not have a boundary, we see that . The set is a sphere with a dimensional linear space removed and thus homeomorphic to the open cylinder (). This means its closure is a closed cylinder and thus homeomorphic to . This gives us the second observation.
The third observation is obviously true for sufficiently small , because the tangent space is the first order approximation of the manifold. Because the second observation holds for any , the third observation follows. Roughly speaking, the isotopy can be found by following from to the limit of going to zero.
More precisely the isotopy can be understood as follows, see also Fig. 7:
Thanks to Proposition 1, is a topological sphere. For each , lies on .
In turn can be rescaled in the radial direction such that the image is contained in . This rescaling is denoted by the map .
The map now gives the isotopy, because the limit is in fact the sphere in the tangent space.
Fig. 7.
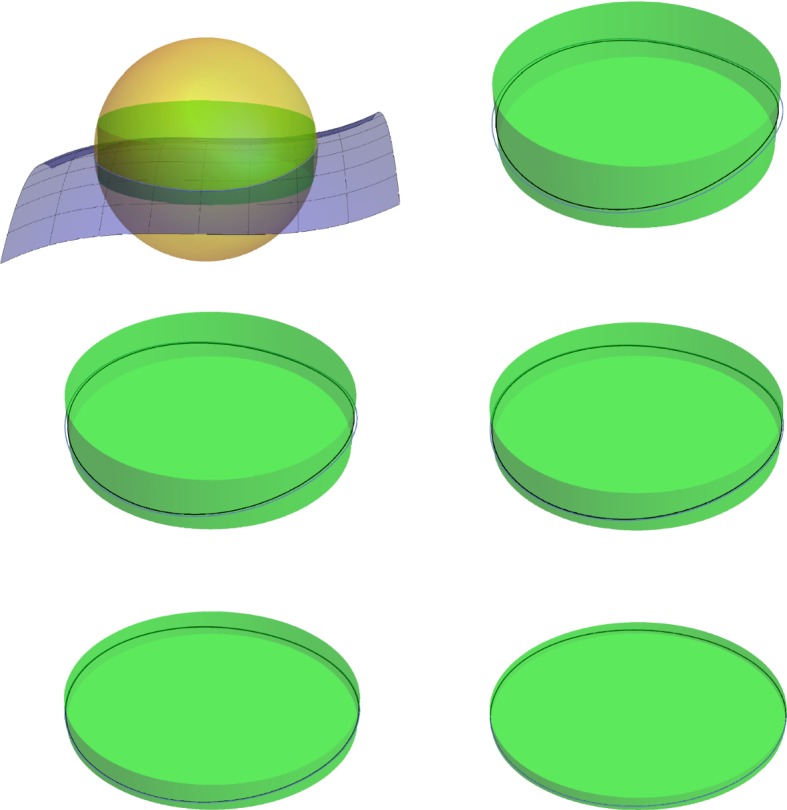
Overview of the proof of the third point of Corollary 4. In the first image we see the intersection between the sphere and the manifold . The following figures focus on the intersection in blue and its projection in black. This is depicted for smaller and smaller radii of the sphere, but rescaled to the size of the fist image. Notice that the curve of intersection tends to the circle (color figure online)
For the existence of the line segment that is contained in both and we need the following corollary of Proposition 1:
Corollary 5
For each such that there exists at least one point .
Proof
The proof, by contradiction, is completely pictorial in nature, see Fig. 8. So let us suppose that there exists a with such that there does not exist a . Consider the ball . is a topological ball, by Corollary 4. We now map (radially) the part of this ball outside the cylinder onto the boundary of , as indicated in Fig. 8. We then project everything onto . By Corollary 4 one has that the result is the image of a topological ball whose boundary coincides with the boundary of . However because we assumed that there did not exist a , this image of the topological ball is topologically non-trivial, which yields a clear contradiction, because if there is a puncture the boundary of the topological ball would no longer be homologically trivial.
Theorem 3
Let , then the angle between and is bounded by
where .
Proof
The idea of the proof is pictorial, as we have seen in the overview in Fig. 5 and below. We shall now give the details.
We consider the balls of radius centred at p and q respectively. The ball of radius centred at the midpoint is clearly contained in both larger balls, being and , as indicated in Fig. 9.
Fig. 9.
The ball lies in both and
We now note that is contained in both the cylinders and . Moreover, there exists an n-dimensional ball of diameter in (the dark disk in Fig. 10) such that for all . Determining is the only part of this proof for which we have to do some calculations, which we postpone until the end of the proof.
Fig. 10.
is the dark disk that lies in the sphere
For each direction in we can consider the line segment connecting two antipodal point on the sphere and the line segment connecting and , see Fig. 11. These two points exist because of Corollary 5. This line segment has at least length . Moreover it lies in both , , with as in (10).
Fig. 11.

The line segment connecting two antipodal point on the sphere is indicated as a dotted red line and the line segment connecting and is indicated in red (color figure online)
We now have a line segment for each direction in that is close to that direction in , because it lies in , and is close to , because the line segment lies in . If this line segment is not too short compared to , Lemmas 10, 11 and Remark 2 give us that the angle between and is small.
The only thing which is left is to give a lower bound . For this we shall use Fig. 12. We shall denote the orthogonal translation of that goes through a point x by . Let be the orthogonal translation of to the furthest possible affine subspace from q, such that the intersection of and is nonempty. is indicated by a thick dashed line in Fig. 12. The radius of the intersection of with gives us .
Fig. 12.

The intersection region of the balls centred at p and q with radius
Because Lemma 10 gives us that m lies at most from and the distance between and is we have, by Pythagoras,
Using Remark 2, we see that
where the factor 2 on the left hand side is due to the fact that we apply the bound twice, once for each cylinder. To be precise we have used
where we understand that the supremum is taken over antipodal points and in and .
Combining the results yields
where .
Remark 3
The bound we presented above can be tightened by further geometric analysis, in particular by splitting into the span of and its orthocomplement. However we chose to preserve the elementary character of the argument. At the moment the bound is about half as good for small as the smooth bound. The bound on itself is a third of what one can prove in the smooth setting. It is not clear that this gap can be completely closed with these techniques.
With the bound on the angles between the tangent spaces it is not difficult to prove that the projection map is locally a diffeomorphism, as has been done in Niyogi et al. (2008).
Metric distortion and geodesic convexity for submanifolds
In this section we prove the results on distortion and geodesic convexity for manifolds. The first part of this exposition is the result of straightforwardly combining the work of Niyogi et al. (2008), and the two dimensional analysis of Attali et al. (2007) with some observations concerning the reach. The proof of geodesic convexity of the intersection of the manifold and a sufficiently small ball (Corollary 1 for manifolds and Theorem 4 for manifolds) uses the same techniques as those we have seen in Sect. 3, and are again based on the simple observation made in Lemma 4. We have included the smooth analysis in the final section because we feel that it gives a different perspective on the problem. Some of the intermediate results, in this smooth setting, may also be of independent interest.
Metric distortion
We remind ourselves that Lemma 5 says that if is a geodesic parametrized according to arc length whose length therefore equals , such that and , we have that,
| 7 |
We now have the following, which is the straightforward generalization of Property I of Attali et al. (2007) to arbitrary dimension and using the reach:
Lemma 12
Let be such that , then
Proof
The length of in the direction is
Because , the result follows.
This bound is tight as it is attained on the sphere of the appropriate dimension.
Convexity
We now prove that the intersection of a ball with radius less than the reach with the manifold is geodesically convex, using differential geometric techniques. To prove this we first give a bound on the distance between (a sufficiently short) geodesic on the manifold and the straight line segment connecting the endpoints of the geodesic. In fact we’ll see that the worst case scenario is the sphere with radius reach. Secondly we’ll show that if points are closer than in the ambient space, they are also close on the manifold. The main result is a fairly straightforward consequence of these two lemmas.
Here we shall use the estimate (7) to prove the following:
Lemma 13
Let be such that and let be a minimizing geodesic parametrized by arc length connecting p and q with length , then
for .
Proof
We shall denote the orthogonal projection onto [pq] by and the direction of the line segment [pq] by z. We now consider the two dimensional curve . The geometric interpretation is the following: We first consider in cylindrical coordinates, where we regard the line that extends [pq] as the ‘z-axis’. We then project on the radial and ‘z’-direction. We also refer to the unit vector in the radial direction as (Fig. 13).
Fig. 13.

A sketch of the curves (blue), (green), and the line segment [pq] (red). The -plane is indicated in greyish green, the ‘z’-direction is the direction of the segment [pq] (color figure online)
Observe that is the projection on the -plane of and thus
because any projection decreases angles. Using (7) we now see that
| 11 |
We also note that .
Let be a point such that , that is lies in the z-direction. There exists such an for there is a point where the maximum of is attained. By possibly interchanging the roles of p and q we can assume that .
We now have the following estimate
where the third inequality is due to the fact that and the last inequality is due to (11). It is clear that the bound is maximized if . This maximum is attained for the sphere of the appropriate dimension.
We can now do the same analysis for any . We see that
which again is maximized if and attained for the sphere.
We also need the following lemma:
Lemma 14
Let be a compact manifold and be such that , then .
Proof
We first note that if , then p and q lie on the same connected component of . In fact we shall prove that if p and q lie on different connected components then . Let and be two connected components of with the smallest distance between them, if there is more than one such pair we pick one. We may assume that p lies on and q on . Consider points the and , where the distance is attained (Fig. 14). The line segment [xy] is normal to both and , from which we can conclude that the midpoint of [xy] is equidistant to both and . Moreover there cannot be another connected component of that is closer to the midpoint because we assumed that and are the two connected components that are the closest. This means that the midpoint lies on the medial axis. Our claim now follows. We can now safely assume that has one connected component.
Fig. 14.
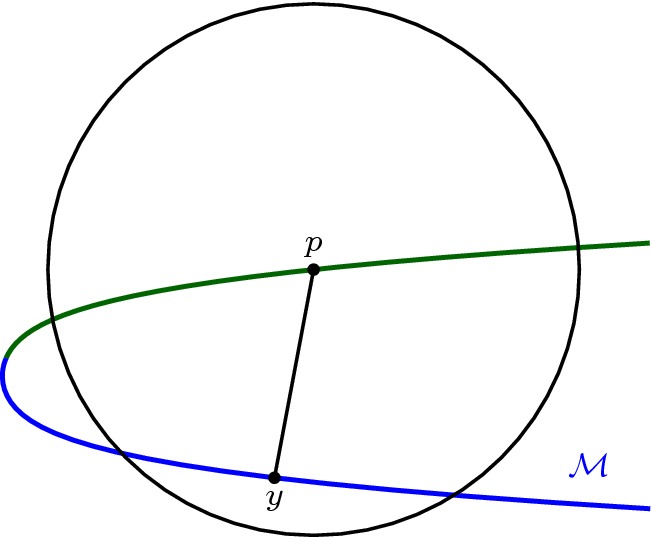
The set is indicated is green, while is blue (color figure online)
Thanks to Lemma 12, we know that if , then . This means that we can subdivide in , the geodesic ball of radius , and . Now suppose that , with the open Euclidean ball of radius . We pick a point that is the closest to p. We now see that
[yp] is normal to at y and thus for all with , , by Federer’s tubular neighbourhood theorem.
For any , we can pick the point with a distance from y. Due to Federer’s tubular neighbourhood theorem but by construction x closer to p than to y, a contradiction. It follows that .
Corollary 6
A minimizing geodesic connecting p and q is contained in the lens shaped region , where is constructed as follows. We first take the circle of radius equal to the reach , such that the line [pq] is a chord. This chord divides the circle in two parts. is the hypersurface of revolution found by revolving the shortest part of the circle, denoted by , around [pq]. Alternatively is also the intersection of all balls of radius reach such that [pq] is a cord on the boundary sphere of the ball (Fig. 15). is also referred to as a spindle.
Fig. 15.
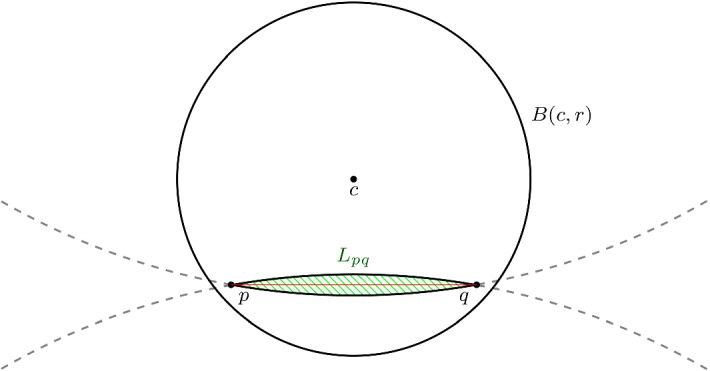
The lens shaped region is indicated in green, the grey dashed circles have radius . We see that (color figure online)
Let B(c, r) be a ball of radius and let p and q now be any points in B(c, r). Eventually we shall again impose that p and q lie on , but we ignore this for the moment. We claim that is completely contained in B(c, r). Consider any affine plane P spanned by containing [pq]. We look at the two circles of radius in this plane, such [pq] is a chord. Because these circles of radius have larger radius than the circle , the shortest parts of the circles of radius , namely and its mirror image, lie inside .
We are now ready to prove the following theorem in the setting. The proof in the -setting is given in Corollary 1.
Theorem 4
Let be a compact manifold embedded in and B(c, r) a ball of radius . Then is geodesically convex, in the sense that a minimizing geodesic connecting any two points in is itself contained in .
Proof
For any two points , we consider the geodesic connecting p and q. As we have seen above and trivially , so
Conclusions and future research
Our characterization of the reach in terms of metric distortion does hold for arbitrary subsets of Euclidean space and is not restricted to the setting. For the bounds on variation of tangent spaces of manifolds with positive reach there is still a gap between the and smooth setting. Closing this gap is quite important as guarantees of many algorithms are based on these results.
Acknowledgements
Open access funding provided by Institute of Science and Technology (IST Austria). We are greatly indebted to Boris Thibert for suggestions and discussion. We thank all members of the Datashape team (previously known as Geometrica), in particular Ramsay Dyer, Siddharth Pritam, and Mael Rouxel-Labbé for discussion. We acknowledge several reviewers for helpful suggestions. We would also like to thank the organizers of the workshop on ‘Algorithms for the Medial Axis’ at SoCG 2017 for allowing us to present some of the results of this paper.
Footnotes
If there is more than one direction we simply pick one.
We can assume positivity without loss of generality, and, again, if there is more than one direction, we pick one.
The research leading to these results has received funding from the European Research Council (ERC) under the European Union’s Seventh Framework Programme (FP/2007-2013)/ERC Grant Agreement No. 339025 GUDHI (Algorithmic Foundations of Geometry Understanding in Higher Dimensions) and the European Union’s Horizon 2020 research and innovation programme under the Marie Skłodowska-Curie Grant Agreement No. 754411.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
References
- Amenta N, Bern MW. Surface reconstruction by Voronoi filtering. Discrete Comput. Geom. 1999;22(4):481–504. doi: 10.1007/PL00009475. [DOI] [Google Scholar]
- Attali D, Lieutier A. Geometry-driven collapses for converting a Čech complex into a triangulation of a nicely triangulable shape. Discrete Comput. Geom. 2015;54(4):798–825. doi: 10.1007/s00454-015-9733-7. [DOI] [Google Scholar]
- Attali, D., Edelsbrunner, H., Mileyko, Y.: Weak witnesses for delaunay triangulations of submanifold. In: ACM Symposium on Solid and Physical Modeling, Beijing, China, pp. 143–150 (2007). https://hal.archives-ouvertes.fr/hal-00201055
- Belkin, M., Sun, J., Wang, Y.: Constructing Laplace operator from point clouds in . In: Proceedings of the Twentieth Annual ACM-SIAM Symposium on Discrete Algorithms, SIAM, pp. 1031–1040 (2009). 10.1137/1.9781611973068.112 [DOI]
- Boissonnat JD, Cazals F. Natural neighbor coordinates of points on a surface. Comput. Geom. Theory Appl. 2001;19(2–3):155–173. doi: 10.1016/S0925-7721(01)00018-9. [DOI] [Google Scholar]
- Boissonnat JD, Ghosh A. Triangulating smooth submanifolds with light scaffolding. Math. Comput. Sci. 2010;4(4):431–461. doi: 10.1007/s11786-011-0066-5. [DOI] [Google Scholar]
- Boissonnat, J.D., Oudot, S.: Provably good surface sampling and approximation. In: Symposium on Geometry Processing, pp. 9–18 (2003)
- Boissonnat, J.D., Dyer, R., Ghosh, A.: Constructing intrinsic Delaunay triangulations of submanifolds. Research Report RR-8273, INRIA (2013). http://hal.inria.fr/hal-00804878. arXiv:1303.6493
- Boissonnat, J.D., Dyer, R., Ghosh, A., Wintraecken, M.: Local criteria for triangulation of manifolds. In: Speckmann, B., Tóth, C.D. (eds.) 34th International Symposium on Computational Geometry (SoCG 2018), Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik, Dagstuhl, Germany, Leibniz International Proceedings in Informatics (LIPIcs), vol. 99, pp. 9:1–9:14 (2018). 10.4230/LIPIcs.SoCG.2018.9. http://drops.dagstuhl.de/opus/volltexte/2018/8722 [DOI]
- Cheng, S.W., Dey, T.K., Ramos, E.A.: Manifold reconstruction from point samples. In: SODA, pp. 1018–1027 (2005)
- Coddington E, Levinson N. Theory of Ordinary Differential Equations. New Delhi: TATA, McGraw-Hill Publishing; 1987. [Google Scholar]
- Dey TK. Curve and Surface Reconstruction: Algorithms with Mathematical Analysis (Cambridge Monographs on Applied and Computational Mathematics) New York: Cambridge University Press; 2006. [Google Scholar]
- Dey T, Giesen J, Ramos E, Sadri B. Critical points of distance to an -sampling of a surface and flow-complex-based surface reconstruction. Int. J. Comput. Geom. Appl. 2008;18(01n02):29–61. doi: 10.1142/S0218195908002532. [DOI] [Google Scholar]
- do Carmo MP. Riemannian Geometry. Basel: Birkhäuser; 1992. [Google Scholar]
- Federer H. Curvature measures. Trans. Am. Math. Soc. 1959;93(3):418–491. doi: 10.1090/S0002-9947-1959-0110078-1. [DOI] [Google Scholar]
- Gromov M, Katz M, Pansu P, Semmes S. Metric Structures for Riemannian and Non-Riemannian Spaces. Basel: Birkhauser; 2007. [Google Scholar]
- Menger K. Untersuchungen uber allgemeine metrik, vierte untersuchungen zur metrik kurven. Math. Ann. 1930;103:466–501. doi: 10.1007/BF01455705. [DOI] [Google Scholar]
- Milnor, J.: Morse Theory. Princeton University Press (1969)
- Niyogi P, Smale S, Weinberger S. Finding the homology of submanifolds with high confidence from random samples. Discrete Comput. Geom. 2008;39(1–3):419–441. doi: 10.1007/s00454-008-9053-2. [DOI] [Google Scholar]
- Palais RS. Morse theory on Hilbert manifolds. Topology. 1963;2(4):299–340. doi: 10.1016/0040-9383(63)90013-2. [DOI] [Google Scholar]
- Scholtes, S.: On hypersurfaces of positive reach, alternating Steiner formulae and Hadwiger’s Problem (2013). ArXiv e-prints arXiv:1304.4179
- Whitehead JHC. On -complexes. Ann. Math. 1940;41(4):809–824. doi: 10.2307/1968861. [DOI] [Google Scholar]
- Zeeman, E.: Seminar on combinatorial topology. Institut des Hautes Études Scientifiques (1963). http://math.ucr.edu/~res/zeeman/Zeeman%20-%20Combinatorial%20Topology%201.pdf. Accessed 1 Sept 2017