

Abstract
We present an improved mascon approach to transform monthly spherical harmonic solutions based on GRACE satellite data into mass anomaly estimates in Greenland. The GRACE-based spherical harmonic coefficients are used to synthesize gravity anomalies at satellite altitude, which are then inverted into mass anomalies per mascon. The limited spectral content of the gravity anomalies is properly accounted for by applying a low-pass filter as part of the inversion procedure to make the functional model spectrally consistent with the data. The full error covariance matrices of the monthly GRACE solutions are properly propagated using the law of covariance propagation. Using numerical experiments, we demonstrate the importance of a proper data weighting and of the spectral consistency between functional model and data. The developed methodology is applied to process real GRACE level-2 data (CSR RL05). The obtained mass anomaly estimates are integrated over five drainage systems, as well as over entire Greenland. We find that the statistically optimal data weighting reduces random noise by 35–69%, depending on the drainage system. The obtained mass anomaly time-series are de-trended to eliminate the contribution of ice discharge and are compared with de-trended surface mass balance (SMB) time-series computed with the Regional Atmospheric Climate Model (RACMO 2.3). We show that when using a statistically optimal data weighting in GRACE data processing, the discrepancies between GRACE-based estimates of SMB and modelled SMB are reduced by 24–47%.
Keywords: GRACE, Mascon, Data weighting, Greenland Ice Sheet, Surface mass balance
Introduction
One of the primary sources of information about mass variations of the Greenland Ice Sheet (GrIS) is the Gravity Recovery and Climate Experiment (GRACE) satellite mission. Using primarily K-band ranging (KBR) data between the two GRACE satellites, monthly sets of spherical harmonic coefficients (SHCs) are computed complete to some maximum degree, e.g. 96 for CSR (the Center of Space Research of the University of Texas at Austin) RL05 solutions (Bettadpur 2012) and 90 for GFZ (GeoForschungsZentrum) RL05 solutions (Dahle et al. 2012). Alternatively, gravity solutions in terms of mass anomalies per mass concentration block (“mascon”) have also been released by Jet Propulsion Laboratory (JPL) (Watkins et al. 2015; Wiese 2015; Wiese et al. 2016), Goddard Space Flight Center (GSFC) (Luthcke et al. 2013) and CSR (Save et al. 2016). To clean KBR data from the contribution of high-frequency mass variations, an ocean tide model [e.g. EOT11a (Savcenko and Bosch 2010)], a model of non-tidal components of the atmospheric and oceanic mass variations [e.g. the Atmosphere and Ocean De-aliasing model (AOD) (Dobslaw et al. 2013)] and other background models are routinely used.
The sensitivity of GRACE measurements is known to be anisotropic: it is higher in the along-track direction and lower in the cross-track direction (Condi et al. 2004; Ditmar et al. 2012). A higher sensitivity amplifies data errors, which are caused, among others, by noise in the data provided by on-board sensors and imperfectness of background models. As a result, monthly sets of SHCs are contaminated by strong north–south “stripes”, with amplitudes that depend on the latitude (Wahr et al. 2006). These amplitudes are smaller in polar areas and larger near the equator (Wahr et al. 2006; Linage et al. 2009).
In principle, gravity field variations expressed in spherical harmonics can be converted into mass anomalies at the Earth’s surface by a spectral transfer using a proper scaling of SHCs (Wahr et al. 1998). To suppress stripes and high-frequency noise, low-pass filters and/or de-striping schemes are typically used (Jekeli 1981; Wahr et al. 1998; Swenson and Wahr 2006) at a price of a reduced spatial resolution and distortions in the estimated mass anomalies (Duan et al. 2009).
Alternatively, the mass anomalies can be estimated from the SHCs using least-squares techniques. In this case, they are modelled as a thin mass layer located at the Earth’s surface, or some approximation of it. The mass layer is introduced as a constant function over mascons of pre-defined geometries. The geometry of the mascons can be chosen to take into account existing physical constraints, like the geometry of the coastal line. A proper choice of the size of the mascons allows for noise suppression without the need for any additional filtering of the SHCs, e.g. de-striping scheme. This helps in reducing distortions in the estimated mass anomalies. Luthcke et al. (2006) were the first to use the mascon representation to derive mass anomalies over Greenland from GRACE level-1b data, followed by Luthcke et al. (2013), Watkins et al. (2015) and Save et al. (2016). To reduce the numerical complexity, variants of the mascon approach have been suggested, which use monthly sets of SHCs as input, e.g. Forsberg and Reeh (2007), Baur and Sneeuw (2011) and Schrama and Wouters (2011). In line with Forsberg and Reeh (2007) and Baur and Sneeuw (2011), we compute monthly sets of gravity disturbances at a mean satellite altitude from the monthly sets of SHCs as data to estimate mass anomalies per mascon.
The major objective of the present study is to develop a statistically optimal variant of the mascon approach applicable to the estimation of Greenland mass anomalies. We suggest a number of improvements upon Forsberg and Reeh (2007) and Baur and Sneeuw (2011). Two of the major improvements are described here. Firstly, we properly propagate the full error covariance matrices of monthly SHCs into gravity disturbances at satellite altitude using the law of covariance propagation. These noise covariance matrices of gravity disturbances are used in the subsequent least-squares adjustment. We expect a noticeable improvement in the estimated mass anomalies and their uncertainties, as noise in SHCs is highly correlated (Swenson and Wahr 2006), among others due to the anisotropic sensitivity of the GRACE KBR data. To address the ill-conditioning of the propagated noise covariance matrices, we develop an approximate inversion scheme based on an eigenvalue decomposition. Secondly, we ensure a spectral consistency between the GRACE-based gravity disturbances and the unknown mascon parameters. The spectrum of the GRACE-based gravity disturbances is limited by the maximum spherical harmonic degree of the monthly sets of SHCs, whereas the mascon representation implies that gravity disturbances contain energy at higher frequencies, too. The spectral consistency has not been considered in previous studies, which is partially due to the fact that in these studies scaled unit matrices were used to represent the data noise. When using full noise covariance matrices as in this study, spectral consistency between model and data noise is indispensable to obtain high-quality solutions.
Typically, the mascon approach makes use of regularization or other spatial constraints to suppress noise at a price of introducing a bias in the solution. In this study, no spatial constraints in the form of regularization are used. Instead, the size of the mascons is chosen carefully in order to control the noise.
To demonstrate the performance of the proposed methodology, we make use of both synthetic and real data. In the latter case, we exploit GRACE Release-05 monthly solutions provided by CSR. To investigate the importance of proper data weighting and for validation, we compare the estimated mass anomalies with surface mass balance (SMB) estimates from the Regional Atmospheric Climate Model (RACMO 2.3) (Noël et al. 2015). However, a direct comparison of GRACE-based and SMB-based mass anomalies is not possible because the latter time-series lacks the ice discharge signal. To solve that problem, we estimate and remove linear trends from both time-series. This is justified because seasonal mass variation signals of Greenland are dominated by SMB-related signals (van den Broeke et al. 2009).
The remaining part of the paper is organized as follows. In Sect. 2, we present the statistically optimal mascon approach. The performance of this approach is demonstrated using simulated data, which is the subject of Sect. 3. Particularly, we investigate to what extent the estimates are improved when incorporating the full noise covariance matrices and ensuring the spectral consistency between the data and the mascon parameters. In Sect. 4, we present the results of real data processing and validate them against SMB time-series. Finally, we provide a summary and the main conclusions in Sect. 5.
Methodology
We propose an improved mascon approach compared to earlier studies by Forsberg and Reeh (2007) and Baur and Sneeuw (2011). Section 2.1 describes the exploited functional model, which is forced to be spectrally consistent with monthly GRACE SHCs. In Sect. 2.2, we discuss a practical way to divide the territory of Greenland into almost equal-area patches of irregular shape. The proper choice of the area over which gravity disturbances at satellite altitude are generated is discussed in Sect. 2.3. Section 2.4 describes the statistically optimal inversion of gravity disturbances into mass anomalies per mascon.
Gravity disturbances
Monthly sets of gravity disturbances at mean satellite altitude are computed from monthly GRACE SHCs using spherical harmonic synthesis. Then, they are linked to the gravitational attraction of mascons at the Earth’s surface. Finally, mascon parameters are estimated using least-squares techniques.
GRACE-based gravity disturbances
In the context of this study, a gravity disturbance is understood as the negative radial derivative of the gravitational potential V, generated by a mass anomaly:
| 1 |
They are linked to a set of GRACE SHCs and complete to degree L as
| 2 |
where GM is the geocentric constant; a is the semi-major axis of the reference ellipsoid; are spherical coordinates of a data point p, which in this study is assumed to be located at an altitude of 500 km above a mean Earth sphere; L is the maximum degree of the monthly GRACE solutions; and is the normalized associated Legendre function of degree l and order m. Notice that the expression contains the load Love numbers , which are introduced to eliminate the effects of the elastic response of the Earth to a load, which is included in the SHCs. The lateral distribution of data points is discussed in Sect. 2.3.
Gravity disturbances generated by a set of mascons
Suppose we have N mascons . The surface density (mass per unit area) of mascon i is denoted as . Then, Eq. (1) can be rewritten as
| 3 |
where G is the universal gravitational constant and
| 4 |
with being the distance between an integration point and the data point p.
has to be computed using numerical integration. Here, we use a composed Newton–Cotes formula. The nodes are located on a Fibonacci grid (González 2010). The number of nodes of mascon i is denoted . Then,
| 5 |
where with the surface area of mascon i. The distance between a Fibonacci point (i, j) with spherical coordinates and the data point p with spherical coordinates can be computed as
| 6 |
where .
Then,
| 7 |
Equation (7) represents the functional model that relates the gravity disturbances and the surface densities of the mascons. In matrix-vector form, Eq. (7) can be written as
| 8 |
where is the vector of surface densities, is the vector of gravity disturbances, and is the design matrix. The vector is estimated from the vector of gravity disturbances using weighted least-squares techniques.
The gravity disturbances of Eq. (2) have a limited bandwidth because the monthly GRACE solutions are limited to a certain maximum spherical harmonic degree. However, the gravity disturbances of Eq. (7) are not band-limited. Hence, the functional model, Eq. (8), is not correct as there is a spectral inconsistency between the data and the model. To obtain a spectrally consistent functional model, we need to apply a low-pass filter to the design matrix , i.e. needs to be replaced by , where
| 9 |
and represents the low-pass filter. Without such a low-pass filter, the short wavelengths of the estimated mascon solution would be biased towards zero.
To define a suitable low-pass filter, we need to remember that each column of the design matrix represents a set of gravity disturbances caused by a single mascon of unit surface density. Therefore, the filter operation can be implemented as follows. Firstly, gravity disturbances caused by a single mascon of unit surface density are computed on an equal-angular global grid. They are used as input to estimate a SH model of gravity disturbances complete to some maximum degree using spherical harmonic analysis. The SH model is truncated at the maximum degree of the monthly GRACE spherical harmonic models and successively used to synthesize a column of the design matrix , which corresponds to the single mascon. This procedure has to be followed for every mascon. The result is a design matrix , which is spectrally consistent with the information content in the data and the data noise covariance matrix.
The spectrally consistent analogue of Eq. (8) is written as
| 10 |
where the vector is introduced to account for noise in the GRACE-based gravity disturbances. This noise is assumed to be of zero mean and Gaussian. Furthermore, we assume that
| 11 |
where is the dispersion operator and is the data noise covariance matrix. The latter is computed on a month-by-month basis from the full noise covariance matrix of the monthly SHCs using the law of covariance propagation.
Then, best-linear unbiased estimator (BLUE) of the mass anomalies is
| 12 |
The BLUE, Eq. 12, is referred to as the “statistically optimal estimator” in this study.
Parameterization
The proper choice of the size of a mascon is important to mitigate noise amplification during the data inversion. To facilitate experiments with different mascon sizes, we developed a procedure for an automatic division of the territory of Greenland into nearly equal-area mascons of a desired size. The procedure consists of two steps. In the first step, Greenland is split into latitudinal strips of equal width, which is chosen to be as close to the desired size as possible. In the second step, each strip is split into individual mascons of an approximately desired size using straight segments in the rectangular projection. The orientation of the segments is adapted to follow the orientation of the west and east borders of the current strip. Examples of the resulting parameterizations are shown in Fig 1. Note that the mascons located at the Greenland coast are defined in line with the coastal geometry.
Fig. 1.
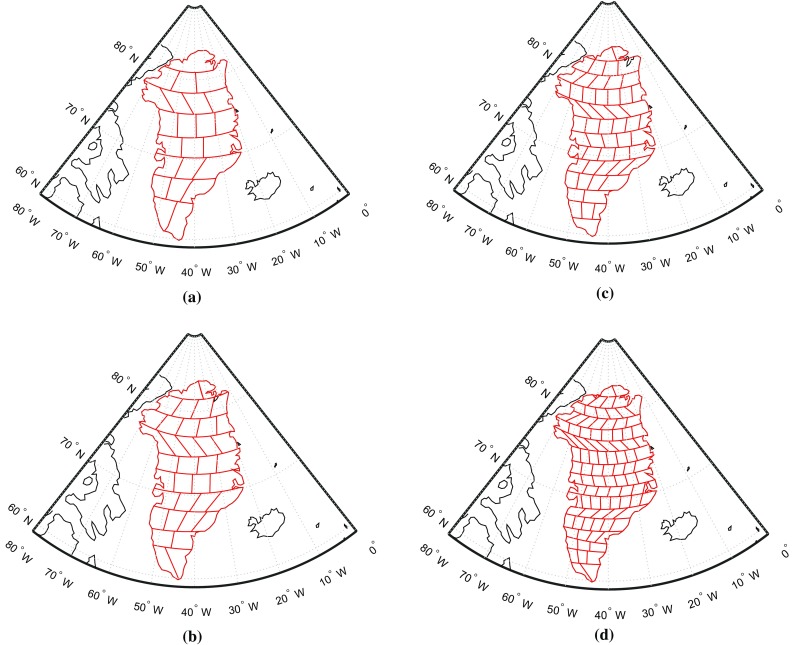
Partitioning of Greenland into 23 (size about km), 36 (size about km), 54 (size about km) and 95 (size about km) mascons, respectively
We also define 9 mascons outside Greenland to reduce leakage of signal from outside Greenland into the Greenland mascons. These mascons cover Iceland, Svalbard and the Canadian Arctic Archipelago glaciers, see Fig. 2. It is worth mentioning that we do not parameterize the nearby ocean areas, due to a minor impact of oceanic mascons, e.g. at the level of 7 Gt/year for the trend over 2003–2013, when the optimal data weighting is applied.
Fig. 2.

Mascons outside Greenland used in this study
Distribution of data points
In choosing the altitude of data grid, we followed the suggestion of Baur and Sneeuw (2011): 500 km. Another option is to use altitudes between 480 and 500 km in order to address the decrease in orbital altitude of the GRACE satellites, as was done by Forsberg et al. (2017). Numerical studies (not shown here) reveal that this leads to similar estimates (around 10 Gt/year in terms of trend over 2003–2013) when the data weighting is switched on. We attribute the observed minor differences to the fact that the applied data processing strategy, including the truncation of the spectrum of the matrix Cd, was fine-tuned for the grid altitude of 500 km. We expect that fine-tuning of the data processing for grid altitudes chosen consistently with actual GRACE orbits would reduce these differences further. This was out of the scope of this study, but may be the subject of future research. The data area comprises Greenland and a buffer zone of 800 km around Greenland. The use of a buffer zone is justified by the fact that each gravity disturbance at satellite altitude is sensitive to a mass redistribution in a neighbourhood of a few hundred kilometres around that point (Baur and Sneeuw 2011). Thus, defining the data area in such a way ensures a more comprehensive representation of the target signals. The data points are located on a Fibonacci grid with a mean distance of 37.5 km. Additional data points on the oceans, but outside the data area are introduced for reasons discussed in Sect. 3.2.2. They are located on a Fibonacci grid with a mean distance of 2000 km. The total number of data points is 6953 with 6867 points inside the data area and 86 points in ocean areas outside the data area.
Data inversion
The full noise covariance matrix of the GRACE-based gravity disturbances, , is ill-conditioned and possesses a gradually decreasing eigenvalue spectrum with many eigenvalues close to zero. Therefore, some kind of regularization is needed before this matrix is inverted. Here, we use an eigendecomposition to compute an approximate inverse, i.e.
| 13 |
where is a unitary matrix which contains the eigenvectors of and is the square diagonal matrix of eigenvalues of . In Appendix A, we show that the matrices and can be computed without an explicit computation of the matrix , which helps to minimize the loss of significant digits.
Formally, the inversion of the matrix can be written as
| 14 |
However, many eigenvalues of the matrix are small, reflecting the ill-conditioning of this matrix. Therefore, an approximate inverse of this matrix is computed as follows. The matrix is truncated in such a way that only the eigenvalues exceeding a pre-defined threshold are retained:
| 15 |
where is the truncation operator with being a unit matrix and is the resulting diagonal matrix, containing a truncated set of eigenvalues. By retaining only sufficiently large eigenvalues, we stabilize the computation of the inverse of the matrix . An approximate inverse of the original matrix is obtained by replacing the missing elements with zeros:
| 16 |
After that, we define the approximate inverse of the matrix as
| 17 |
where
| 18 |
is the truncated matrix containing only the eigenvectors related to the retained eigenvalues. Then, according to Eq. (12), the weighted least-squares solution is
| 19 |
where
| 20 |
This solution is still unbiased, but strictly spoken not a minimum dispersion solution.
Numerical experiments
We do a number of numerical experiments to investigate the performance of the improved mascon approach and to fine-tune some data processing parameters. In Sect. 3.1, we present the basic set-up of the numerical experiments. Section 3.2 is devoted to a presentation and discussion of the results. The importance of the spectral consistency is discussed in Sect. 3.3.
Experimental set-up
The basic set-up used in all numerical experiments includes the definition of (i) the “true” signal and (ii) the error sources.
“True” signal
We define the “true” signal as the yearly mass change, which is determined on the basis of trends extracted from ICESat altimetry data (see Table 1) (Felikson et al. 2016). As shown in Fig. 3, these trends represent the mean rate of mass change over the period 2003–2009 per 20 20 km patch covering entire Greenland, converted from the surface elevation change rate by applying a density of 917 kg/ (Wahr et al. 2000). This signal is directly used to compute the mass anomaly per mascon as “truth”. Using the proposed mascon approach, we generate gravity disturbances at satellite altitude from the ICESat altimetry data. Thereafter, we low-pass-filter them to limit the spectrum to spherical harmonic degrees from 1 to 120. Finally, we estimate mass anomaly per mascon and compare with the “truth” to evaluate the performance of the methodology.
Table 1.
A summary of data used in this study
| Data | Role | Temporal resolution | Spatial resolution | Pre-processing |
|---|---|---|---|---|
| ICESat elevation change rate | Simulating the true signal | 2003–2009 | 20-km blocks | – |
| GRACE SHCs from DMT | Simulating signal leakage | Month | Degree 120 | – |
| GRACE SHCs from CSR RL05 | Real data | Month | Degree 96 | – |
| Surface mass balance from RACMO 2.3 | Validating estimates | Daily | 11-km blocks | Resampled to monthly mean SMB for each drainage system and entire Greenland |
Fig. 3.

The “true” signal defined as the yearly mass change over the GrIS, in terms of EWH in units of metres
There is much freedom in the definition of the “true” signal in the presence of secular trends. The “true” signal may reflect total mass change over an arbitrary time interval, ranging from one month to many years. The choice of the time interval determines the contribution of error sources like signal leakage and parameterization errors to the overall error budget. If the time interval is short (e.g. one month), signal leakage and parameterization errors may be small compared to the data noise. However, the relative contribution of these error sources to the overall error budget increases with increasing time interval. In this study, we define the “true” signal as the yearly mass change, which represents a kind of intermediate choice between the two extremes of a monthly signal and a multi-year signal. Our time interval is somewhat shorter than that considered in the study by Bonin and Chambers (2013), which was set equal to 4 years. In any case, the amplitude of the true signal in real GRACE data processing may differ depending on the signal of interest, which may range from short-term mass variations to long-term trends.
Error sources
The data generated in the previous section are superimposed by errors. In this study, we consider 4 error sources, i.e. signal leakage, AOD noise, random noise in GRACE-based SHCs and parameterization error. The latter is also sometimes referred to as “model error” (e.g. Xu 2010; Stedinger and Tasker 1986).
3.1.2.1 Signal leakage In this study, signal leakage refers to the impact of mass variations from outside Greenland on the estimated mascons. To simulate signal leakage, we introduce mass variations in Alaska, northern Canada, northern Russia and Fennoscandia, see Fig. 4. The “true” signal over these areas is also defined as the yearly mass variation. It is generated using the available optimally filtered trend over 2003–2008 based on the Delft Mass Transport (DMT) model (Siemes et al. 2013).
Fig. 4.

Mascons used to simulate signal leakage. The value of each mascon is the full signal generated using the trend over the period 2003–2008 derived from the DMT model, in terms of EWH in units of metres
3.1.2.2 AOD noise AOD noise refers to errors in the background models, which are used to reduce non-tidal mass transport in the atmosphere and ocean. AOD error is considered to be one of large error sources in the monthly solutions. Here, we also take 10% of the difference of two AOD models separated by one year as the AOD noise, in line with the definition of the true signal (yearly mass accumulation). To that end, we choose AOD models in August of 2005 and 2006, because this period is roughly in the middle of the true signal (ICESat trend over 2003–2009). Based on our numerical study, we find that the AOD noise plays a minor role. Therefore, there would be negligible impact if a different time interval were chosen. Defining the AOD error as 10% of the AOD model signal is believed to be a reasonable choice, in view of previous studies (Thompson et al. 2004; Ditmar et al. 2012).
3.1.2.3 Random noise We assume that the yearly mass change is the result of the difference between two monthly solutions separated by a time interval of one year. Furthermore, we assume that there is no noise correlation between monthly solutions. This implies that the random noise in the generated yearly mass change can be set equal to the noise in a monthly solution multiplied with a factor of . First, we generate a vector of zero-mean white Gaussian noise with unit variance; the length of is equal to the number of SHCs. Then, a realization of correlated noise with the covariance structure of the matrix is obtained as
| 21 |
where is the lower triangular Cholesky factor of the noise covariance matrix of GRACE monthly SHCs:
| 22 |
In this study, the noise covariance matrix is complete to degree 120. It describes the noise in GRACE SHCs in August 2006 and was produced together with the DMT model. Note that the noise in the degree-one coefficients is not included. One hundred random noise realizations are simulated in this way in order to make the results of the numerical study more representative. Figure 5 shows one of these noise realizations in terms of EWH (equivalent water height).
Fig. 5.

The top panel shows the AOD error, which is taken as 10% of the difference between August 2005 and August 2006. The bottom panel is a realization of simulated random errors based on the DMT noise covariance matrix of spherical harmonic coefficients for August 2006. (The matrix is complete up to degree 120.) The units are metres of EWH
3.1.2.4 Parameterization errors Parameterization errors are caused by the fact that the adopted parameterization assumes a uniform surface density distribution within each mascon, whereas the actual distribution within a mascon may spatially vary. Here, parameterization errors are automatically introduced, as the “true” signals are generated with ICESat altimetry data with a spatial resolution of 20 km, which is much finer than the mean size of a mascon.
Choice of the optimal data processing strategy
There are a number of choices to be made when using the improved mascon approach:
the size of the buffer zone around Greenland;
the number of additional data points in the oceans outside the data area;
the number of mascons covering entire Greenland;
the choice of the least-squares estimator (i.e. ordinary least-squares versus weighted least-squares);
the number of eigenvalues to be retained when computing an approximate inverse of the noise variance–covariance matrix .
In a series of numerical experiments, we have investigated various choices. For each choice, 100 solutions have been computed each using a different random noise realization. Other error sources were kept the same in all experiments. Each solution has been converted into mass anomalies per mascon (in Gt) and then summed up over all “Greenland” mascons to yield the total mass anomalies over entire Greenland. The total mass anomalies are then compared with the “true” ones; the RMS difference between estimated and true total mass anomalies is used as a measure of the quality of the solution.
In this way, we found the optimal choice of the various parameters mentioned before, which is shown in Table 2. In the next sections, we show how the inversion results deteriorate if a suboptimal choice is made. In each test, only one parameter is changed. Regarding data weighting, we always compute two solutions: a weighted least-squares solution (weight matrix is the inverse of the full noise covariance matrix) and an ordinary least-squares solution (weight matrix is the unit matrix).
Table 2.
Optimal set of parameters for the estimation of total mass variations of entire Greenland
| Options | Optimal choice |
|---|---|
| Width of the buffer zone around Greenland | 800 km |
| Using additional data points over the global oceans | Yes |
| Number of mascons within Greenland | 23 |
| Optimal data weighting applied | Yes |
| Number of eigenvalues retained in the approximate inversion of | 600 |
| Spectral consistency maintained | Yes |
Width of the buffer zone around Greenland
It is well known that a buffer zone beyond the area of interest is necessary (Baur 2013). In this study, the extension is referred to as the buffer zone. To investigate the impact of the choice of the buffer zone on the estimated mass anomalies over entire Greenland, we consider buffer zones varying from 100 to 1400 km (cf. Fig. 6). For each choice of the buffer zone a weighted least-squares solution and the ordinary least-squares solution are computed. The other parameters are set equal to the values shown in Table 2. The resulting RMS error of the recovered Greenland mass anomalies is shown in Fig. 7. Using a weighted least-squares estimator, the RMS error is minimum for a 800-km buffer zone, though other choices only increase the RMS error with a few Gt. From this we conclude that when using a proper data weighting, the solution is quite robust against the choice of the buffer zone. The situation is different when an ordinary least-squares estimator is used. The smallest RMS errors are obtained for buffer zones larger than 600 km with little variations. For smaller buffer zones, however, the RMS errors increase quickly and attain values which are a few tens of Gts higher than the minimum. Overall, the RMS error of a weighted least-squares solution is always smaller than the RMS error of an ordinary least-squares solution.
Fig. 6.

Buffer zones around Greenland considered in this study
Fig. 7.

RMS error of estimated mass anomalies as a function of the buffer zone size. Red with data weighting, green without data weighting. Different vertical scales are used when plotting the red and green curves
Using data points distributed over the oceans globally
GRACE-based SHCs at very low degrees (particularly at degree 2) are relatively inaccurate. In principle, the implemented data weighting should suppress noise which originates from these low-degree coefficients (Chen et al. 2005). However, in regional studies as considered here, the contribution of different low-degree SHCs cannot be separated. Therefore, any attempt to suppress noise in the very low-degree SHCs may introduce a bias in the estimated mass anomalies over entire Greenland. For instance, eliminating the may reduce the estimated trend over 2003–2013 of GrIS mass variation by 18 Gts. To avoid such a bias, we add additional data points. To avoid that they capture signal below them, and they are confined to the oceans. Figure 8 shows the geographic location of these additional data points.
Fig. 8.

Location of additional data points over the oceans. The mean distance is about 2000 km
The additional data points are located on a Fibonacci grid with a mean distance of about 2000 km. Solutions are computed with and without the additional data points. A comparison of these solutions reveals that the added value of using additional data points is 0.02% when using ordinary least-squares and 0.5% when using weighted least-squares. Though the improvement is minor, we recommend to add additional data points in regional studies. The numerical complexity does not change much as the total number of extra points is very limited.
Optimal number of mascons over Greenland
In this test, we split the territory of Greenland into mascons of different sizes: from approximately km to approximately km, which corresponds to the number of mascons ranging from 23 to 95 (see Fig. 1). In addition, we consider also the division of Greenland into 6 or 12 mascons, as proposed in (Luthcke et al. 2006) (Fig. 9). The RMS differences between the recovered and true mass anomaly estimations are shown, as a function of the number of mascons over entire Greenland, in Fig. 10. We notice a significant reduction in the RMS error when a weighted least-squares estimator is used, between 19 and 65%, depending on the size of the mascons.
Fig. 9.

Partitioning of Greenland into 6 and 12 mascons, respectively, in line with Luthcke et al. (2006). a 6 drainage systems, b 12 mascons
Fig. 10.

RMS errors in estimated mass anomalies over Greenland as a function of the number of mascons
From the green curve in Fig. 10, obtained without optimal data weighting, we find that the RMS error in the case of 6 mascons is larger than that for 23 mascons. Note that the numerical study shown in Fig. 11 considered all noise types, including random noise and representation error. It is also worth noticing that when using weighted least-squares, the quality of results based on 6 drainage systems is slightly higher than that based on 23 mascons (see the red curve in Fig. 10). This is caused by the fact that the random noise in the case of 6 mascons is reduced (i.e. from 15 to 9 Gt), as compared to 23 mascons. The numbers of 15 and 9 Gt are the result of additional numerical studies where random noise was the only error source. We did not include the details in the form of tables and figures in an attempt to limit the length of the paper and because they are not critical for the main conclusions of our study. As the difference of the RMS values in the cases of 6 and 23 mascons (see the red curve in Fig. 10) is rather small and 23 mascons provide a much better spatial resolution than 6 mascons, we recommend using 23 mascons.
Fig. 11.
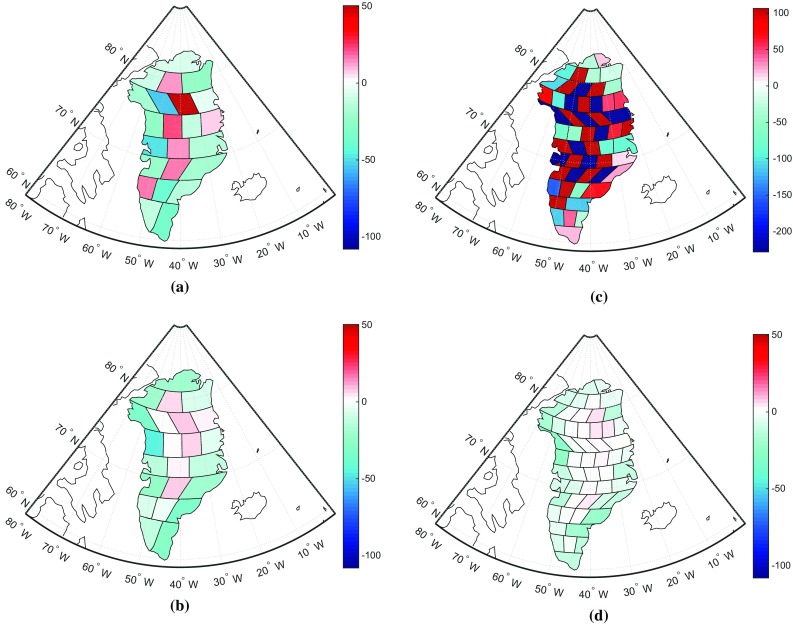
a Spatial pattern of recovered mass anomaly per mascon. They are estimated from the data that were contaminated by the errors presented in Figs. 4 and 5 (Gt). b For a better visual comparison, the true signal defined in Fig. 3 is spatially resampled to 23 mascons and shown in the unit of Gt. Similar to (a) and (b), (c) and (d) are for 54 mascons
The estimated mass anomalies for 23 mascons are shown in Fig. 11a; they are estimated from the data that were contaminated by the errors presented in Figs. 4 and 5. We find that in general the recovered mass anomalies show some agreement with the true signal. For instance, the mass losses take place in the coastal area and are mainly located in the north-west and south-east of Greenland. However, we could also find that the recovered mass per mascon does not exactly represent the spatial pattern of the signal. This finding is consistent with Baur (2013) and Bonin and Chambers (2013). For instance, the recovered spatial pattern in the inner part of Greenland noticeably deviates from the true signal. The recovered solution is much worse when using too many (i.e. 54) mascons as shown in Fig. 11. Due to a small size of mascons (about km), the recovered mean mass anomalies are quite unstable, with many positive and negative estimates next to each other.
Number of eigenvalues retained in the approximate inversion of the noise covariance matrix
The high condition number of the noise covariance matrix does not allow a stable computation of the weight matrix, and some regularization is necessary. In this study, we use a truncated eigenvalue decomposition to improve the condition number prior to inversion (cf. Sect. 2.4). In order to estimate the optimal number of eigenvalues to be retained, we consider values between 200 and 1,600. The dimension of the noise covariance matrix is in our case.
The RMS error of the estimated mass anomalies over Greenland is relatively large when only 200 eigenvalues are retained, but decreases by 49%, as the number of retained eigenvalues increases to 600 (see the red curve in Fig. 12a). A further increase also increases the RMS error. Therefore, we retain only the first 600 eigenvalues, i.e. about 10%. The condition number of the noise covariance matrix obtained in this way is . Based on Fig. 12b, which shows the same RMS error as a function of the condition number, we conclude that in general it makes sense to keep the condition number below a value of .
Fig. 12.

RMS errors in estimated mass anomalies as a function of a the number of retained eigenvalues and b the condition number after truncation
Spectral consistency
As explained in Sect. 2, the parameterization of the signal has to be spectrally consistent with the data. In this section, we demonstrate the importance of that requirement, as this requirement has not been fulfilled in previous studies. A series of tests will be done. For each test, two solutions are computed. One, which is already considered in the previous section, uses the low-pass-filtered design matrix , and the other one, the unfiltered design matrix, (cf. Eq. (9)). In all tests, the “true” data are generated using the design matrix . The number of eigenvalues which are retained in the data weighting varies between 200 and 1600.
Figure 12a shows the RMS error of the estimated total mass anomalies as a function of the retained eigenvalues. There are hardly any differences between the solutions using design matrix compared to if no more than 600 eigenvalues are retained. Above 600 eigenvalues, the RMS error increases quickly if the design matrix is used and attains values close to the signal. We explain this high RMS error with the fact that the estimated mass anomalies go to zero. When using the spectrally consistent design matrix , the RMS error is almost the same (around 20 Gts) if at least 400 eigenvalues are retained. From this experiment we conclude that spectral consistency is important to obtain high-quality mass anomalies.
In addition, we perform a number of experiments to demonstrate the importance of using realistic signal spectra in GRACE numerical studies in general. In those tests, the unfiltered design matrix is used not only to invert gravity disturbances, but also to simulate them on the basis of yearly mass changes (Sect. 3.1.1). In that sense, the mascon functional model in these tests is consistent with the input data. At the same time, the simulated data are not realistic in the sense that the generated signal is not band-limited unlike signals which are represented by a truncated spherical harmonic series. Furthermore, the only error source considered in these tests are random errors. Data weighting is used when estimating the mass anomalies.
The tests are performed for different numbers of retained eigenvalues in the spectral representation of the matrix . As shown in Fig. 13, an unrealistic (not band-limited) signal spectrum provides error estimates of the mass anomalies, which are too much small. If the number of retained eigenvalues exceeds 1400, the estimated formal RMS uncertainties of the mass anomalies are Gt. We explain this by a spectral mismatch between signal and noise. Whereas in these experiments the signal bandwidth is not band-limited, the generated data noise is band-limited to a maximum spherical harmonic degree 120. Thus, signal above degree 120 is considered as being noise-free. Then, the exploited data inversion procedure, which suppresses data noise in the statistically optimal way, manages to exploit that high-frequency error-free signal in the recovery of mass anomalies. From these experiments, we conclude that when ignoring a proper reproduction of the signal content in numerical tests, the obtained results may be over-optimistic, particularly when a weighted least-squares estimator is used.
Fig. 13.

RMS errors of estimated mass anomalies over entire Greenland as a function of the number of retained eigenvalues. Data weighting is applied
This experiment also explains the poor performance of the statistically optimal data inversion in the presence of spectral inconsistencies, which have been reported in the previous section. In that case, the applied data weighting assigns unrealistically high weights to high-frequency components of the signal. These signal components, however, have been removed when low-pass-filtering the design matrix. Then, the estimated mass anomalies tend to zero when more and more eigenvalues of the matrix are retained.
Real GRACE data analysis
The performance of the proposed approach is analysed using real GRACE data. Here we use Release-05 GRACE monthly gravity field solutions from CSR from January 2003 to December 2013. Missing months are not interpolated, but just left out. Each monthly solution is provided as a set of SHCs complete to degree 96 including a full noise covariance matrix. We replace the coefficient of all monthly solutions with estimates based on satellite laser ranging (Cheng et al. 2013). Degree-one coefficients are taken from Swenson et al. (2008) including noise variances. The Glacial Isostatic Adjustment (GIA) signal in GRACE data is removed using the model compiled by A et al. (2013).
The data are used to compute a time-series of Greenland mass anomalies. To that end, we follow the recommended data processing set-up, which is summarized in Table 2. We compute both weighted least-squares solutions and ordinary least-squares solutions.
The results are analysed in three different ways. In Sect. 4.1, we quantify the noise in the time-series of estimated Greenland mass anomalies using only the data themselves. The method applied is briefly described in Sect. 4.1. In Sect. 4.2, we compare the GRACE-based time-series (after correction for ice discharge) with time-series of SMB synthesized from the RACMO 2.3 model. We evaluate mass anomalies not only for entire Greenland, but also for individual drainage systems. In line with van den Broeke et al. (2009), we merge the 23 patches into five drainage systems: North (N), Northwest (NW), Southwest (SW), Southeast (SE) and Northeast (NE), cf. Fig. 14. In Sect. 4.3, a comparison between the estimates in this study and other mascons solutions is presented.
Fig. 14.

Partitioning of Greenland into 23 mascons, and the definition of the five individual drainage systems
Estimating mass anomaly uncertainties
First of all, we quantify noise in mass anomaly time-series using an original approach that does not require any independent reference. The approach is based on the assumptions that (i) true signal in the data time-series is close (but not necessarily equal) to a combination of an annual periodic signal and a linear trend; (ii) noise in the data time-series is uncorrelated and (optionally) non-stationary; and (iii) time-series of noise variances is known up to a constant scaling factor. The basic idea is to approximate the original data time-series with a regularized one , for which purpose the following functional is minimized:
| 23 |
where is a diagonal weight matrix, which accounts for temporal variations of noise level; is the noise variance; is the signal variance; and R is a regularization matrix, which is designed such that periodic annual signals and a linear trend in the data are not penalized. An estimation of the noise variance and the signal variance is a part of the regularization procedure. To that end, the variance component estimation (VCE) technique (Koch and Kusche 2002) is used. This technique is iterative: at each iteration, the estimates of and are updated, which allows for a better regularization of the original time-series and, therefore, in a better estimation of and at the next iteration. As soon as the procedure converges, the latest estimate of is used as the measure of standard deviation of random noise in the considered data. A more extended presentation of this approach will be the subject of a separate publication.
In this study, we use this approach to quantify the uncertainties in mass anomaly estimates both for entire Greenland and for the five drainage systems mentioned before.
Table 3 summarizes the main results. They confirm that, compared to an ordinary least-squares solution, optimal data weighting reduces random noise in mass anomaly estimates substantially. The largest reduction, 69%, is observed for the SW drainage system. This is likely due to a relatively large contribution of random noise to the estimated mascon of this drainage system, so that the statistically optimal data weighting becomes particularly efficient. An increased level of random noise over the SW drainage system can be explained by its relatively small size. The smallest reduction in random noise, which is observed in the NE drainage system, is still substantial, about 35%. For entire Greenland, the random noise is reduced by a factor of two.
Table 3.
VCE-based noise standard deviations (in Gt) of estimated mass anomalies for (i) entire Greenland and (ii) five individual drainage systems
| Data weighting | N | NW | SW | SE | NE | GrIS |
|---|---|---|---|---|---|---|
| No | 14 | 49 | 30 | 39 | 34 | 33 |
| Yes | 9 | 16 | 9 | 17 | 17 | 16 |
| Reduction (%) | 35 | 67 | 69 | 56 | 52 | 50 |
Validation against modelled SMB time-series
The estimated mass anomalies are compared with modelled SMB estimates over the period 2003–2013 computed using the Regional Atmospheric Climate Model (RACMO) version 2.3 (Noël et al. 2015). The spatial resolution of the RACMO 2.3 model is 11 11 km (see Table 1). We integrate the daily SMB estimates over time to produce daily mass anomalies, and then compute on their basis monthly mean values, to be consistent with the temporal resolution of GRACE. Finally, the computed mass anomalies are spatially integrated over individual drainage systems and over entire Greenland, respectively.
The mass anomalies derived from GRACE account for both SMB and ice discharge. According to van den Broeke et al. (2009), ice discharge manifests itself mostly as a long-term trend, whereas the seasonal mass variations are largely attributed to surface processes. In view of that, we de-trend both SMB- and GRACE-based time-series prior to their comparison. To that end, we approximate each of them with the analytic function f(t):
| 24 |
where A to F are constant coefficients, which are estimated using ordinary least-squares, is the reference epoch defined as the middle of considered time interval, and with year. The de-trending comprises the first two terms of f(t). After de-trending, the residual GRACE-based and SMB-based time-series are compared. In the comparison, GRACE-based mass anomalies produced both with and without data weighting are considered. The de-trended GRACE-based and SMB-based time-series are shown in Fig 15 with and without using data weighting. Remarkable is the erratic behaviour of GRACE-based time-series per drainage system when no data weighting is used. This erratic behaviour is averaged out when computing mass anomaly time-series for entire Greenland.
Fig. 15.

De-trended mass anomaly time-series based on modelled SMB (outlined by the grey zone) and GRACE data, for individual drainage systems and entire Greenland. GRACE-based time-series were computed with (red) and without (green) data weighting
Figure 16 shows the time-series of the differences between GRACE-based and SMB-based time-series of mass anomalies. Statistics of the differences are shown in Table 4. When data weighting is used, the differences are much smaller compared to solutions without data weighting. The most significant improvement is attained in the SW drainage system, which is consistent with the results obtained with the VCE technique (cf. Sect. 4.1). At the same time, the improvement observed for entire Greenland is smaller, about 17%, than those of individual drainage systems (24–47%). This is likely due to the fact that when summing up mass anomalies per mascon to get the mass anomalies of entire Greenland, the random noise is reduced by averaging out. Therefore, a relatively low level of random noise can be achieved for the estimates of entire Greenland, compared with the estimates per mascon. However, this will not affect the determination of other optimal parameters in Table 2. Because our operation (i.e. summing up mass anomalies per mascon to get the mass anomalies of entire Greenland) is applied to the final estimates. As a result, the remaining difference in Fig. 16f should rather be explained by residual physical signals than by noise. Such signals may reflect nonlinear mass variations not related to SMB, such as inter-annual variability in ice discharge or meltwater retention. A physical interpretation of these signals is outside the scope of this study.
Fig. 16.

Differences of SMB-based and GRACE-based de-trended mass anomaly time-series for individual drainage systems and entire Greenland. GRACE-based time-series were computed with (red) and without (green) data weighting. a N, b NE, c NW, d SE, e SW, f GrIS
Table 4.
Ice discharge-corrected RMS differences (in Gts) between GRACE-based mass anomaly estimates and SMB-based mass anomalies for (i) entire Greenland and (ii) five individual drainage systems
| Data weighting | N | NW | SW | SE | NE | GrIS |
|---|---|---|---|---|---|---|
| No | 16 | 48 | 34 | 54 | 37 | 76 |
| Yes | 12 | 27 | 18 | 41 | 27 | 63 |
| Reduction (%) | 28 | 44 | 47 | 24 | 27 | 17 |
Comparison with Greenland mass anomalies from other studies
The mass anomaly estimates are further compared with those based on existing global and regional mascon solutions, as well as with results from the literature. The available global mascon solutions discussed in this study are the products released by JPL (Watkins et al. 2015), GSFC (Luthcke et al. 2013) and CSR (Save et al. 2016). Note that these mascon solutions are estimated from GRACE KBR data, while the method developed in this study uses GRACE SHCs. We also include the regional mascon solution by Wouters et al. (2008), which also takes GRACE SHCs as input. As shown in Fig. 17, different mass anomaly time-series of entire Greenland agree with each other very well. The same applies to the linear trend estimates, which are shown in Table 5.
Fig. 17.

Mass anomaly time-series produced in this study with data weighting and without data weighting, as well as by Wouters et al. (2008) (marked as “BW”), JPL, GSFC and CSR. The unit of Y-axis is mass variation in Gts. Each plot highlights only one solution (black line), whereas other solutions are shown in grey
Table 5.
Greenland mass anomaly trends over the period 2003–2013 (in Gt/year) estimated from different solutions and experimental set-ups
As before, we use VCE-based estimation of random noise standard deviations and a validation against modelled SMB estimates to assess the quality of the various mascon solutions. The smallest noise standard deviation (16 Gt) is observed for the solution produced in this study with the optimal data weighting (Table 6). A comparable noise standard deviation (19 Gt) is estimated for the JPL solution, whereas standard deviations for other solutions are much larger. When validating against independent SMB output, the solution produced in this study with the optimal data weighting shows, again, the best performance (see Table 6). From Table 6, it follows that relatively low VCE-based standard deviations in the JPL solutions do not indicate a better quality. This might be caused by the fact that the application of spatio-temporal constraints in the production of those solutions could reduce random noise, but at a price of making the estimates biased towards a priori information, which is reflected in the applied constraints. The bias becomes visible when validating with independent data such as SMB model estimates. This justifies our decision not to apply any spatial or temporal constraints in producing our solutions in order to minimize biases. A rapid mass loss in an area of a limited size is a particularly challenging scenario for any method for mass anomaly estimation. In particular, the impact of a bias caused by the applied constraints can be particularly large in that case. An in-depth discussion of this issue is beyond the scope of this manuscript. A further discussion of biases introduced into mascons solutions by various spatio-temporal constraints will be the subject of a separate article.
Table 6.
VCE-based noise standard deviations (in Gts) of estimated mass anomalies (left column) and ice discharge-corrected RMS differences (in Gts) between GRACE-based mass anomaly estimates from different mascon solutions and SMB-based mass anomalies (right column). All the estimates refer to entire Greenland
| Different estimates | VCE-based noise | Ice discharge-corrected |
|---|---|---|
| standard deviations | RMS differences | |
| With data weighting (this study) | 16 | 63 |
| No data weighting (this study) | 33 | 76 |
| JPL mascon | 19 | 73 |
| CSR mascon | 29 | 70 |
| GSFC mascon | 45 | 76 |
| Wouters et al. (2008) | 36 | 79 |
Summary and conclusions
In this study, we proposed an improved mascon approach compared to the previous studies of Forsberg and Reeh (2007) and Baur and Sneeuw (2011). Based on numerical experiments, we optimize various parameters shown in Table 2. The proposed methodology allows the estimation of mass anomalies over Greenland in a statistically optimal way, by propagating the full noise covariance matrices of SHCs into full noise covariance matrices of gravity disturbances at altitude, which are then used as data in the mass anomaly estimation scheme. We show that the data weighting improves the accuracy of the estimated mass anomalies substantially. The high condition number of the noise covariance matrix is addressed successfully using a truncated eigenvalue decomposition, which retains about 10% of the eigenvalues corresponding to a condition number of about . We also demonstrated that the optimal size of a mascon is about km, which implies about 23 mascons for Greenland. This finding is consistent with the spatial resolution of GRACE reported in the literature (Longuevergne et al. 2010; Ramillien et al. 2004; Beighley et al. 2011). Furthermore, we have proven that spectral consistency of the mass anomaly model and the data is very important to obtain accurate estimates of the mass anomalies. If data weighting is applied, a spectral inconsistency makes the recovery of mass anomalies non-robust and provides severely biased estimates. This is more pronounced if more eigenvalues of the noise covariance matrix are retained. Then, the high-frequency components of the model are over-weighted, resulting in gravity anomalies close to zero, because high-frequency signal is absent in the data. The maximum degree in the low-pass filter applied to maintain a spectral consistency must be consistent with the GRACE solutions utilized to generate the pseudo-observations. More specifically, in the simulation, we choose the maximum degree to be 120, in line with the DMT solutions. However, in the real data processing, the CSR solutions are utilized. Then, the maximum degree is 96, in line with the CSR solutions.
It is worth stressing that the set of parameters shown in Table 2 is optimal if the main goal is to estimate mass anomalies over a one-year interval. This scenario represents a kind of intermediate choice between the two extremes of a monthly signal and a mean signal over a multi-year time interval (e.g. a long-term linear trend). In our latest studies, we found that the optimal data processing scenario definitely depends on the temporal scale of interest. If, for instance, the main focus is on a long-term trend, the impact of random noise (north–south stripes) is minor, so that other types of noise (particularly the parameterization error) become dominant. In that case, the way to improve the quality of the estimates is reducing the size of individual mascons and applying a data weighting based on provided error covariance matrices of GRACE monthly solutions. On the other hand, if the main research interest is month-to-month mass anomaly variations, random noise by far exceeds noise of other types, including the parameterization errors. Then, the best results are obtained when the size of individual mascons is relatively large, whereas the data weighting based on provided error covariance matrices is switched on. These and other findings are discussed in detail in a separate manuscript.
We also applied the proposed data processing scheme to real GRACE data and computed mass anomaly time-series for five drainage systems and entire Greenland. Using VCE, we found that when a proper data weighting is used, the accuracy of the estimated mass anomalies increases by a factor of 1.5 to 3.0, depending on the drainage system. A comparison of the GRACE-based mass anomalies with modelled SMB mass anomalies revealed that a proper data weighting provides a better fit of GRACE-based and SMB-based mass anomalies, with improvements between 24 and 47% depending on the drainage system. We consider this as indication that a proper data weighting provides much more accurate estimates of mass anomalies. The improvement is, however, marginal for entire Greenland. This is likely due to a relatively minor role of random noise when estimating mass anomalies over very large areas.
Acknowledgements
We would like to thank the Center for Space Research at University of Texas at Austin for providing GRACE level-2 data and the corresponding error variance–covariance matrices (both are available from http://www.csr.utexas.edu/grace). The JPL mascon solutions are available at http://grace.jpl.nasa.gov, supported by NASA MEaSUREs Program. Goddard Space Flight Center (GSFC) is acknowledged for providing NASA GSFC mascon solutions. We also thank Dr. B. Gunter, who provided us with the GrIS elevation change rates over 2003–2009 estimated from ICESat data. Noël B. and van den Broeke M. R. are acknowledged for providing SMB estimates produced with RACMO 2.3. J. Ran thanks his sponsor, the Chinese Scholarship Council. J. Ran has also been partly supported by the Major National Scientific Research Plan (2013CB733305) and the National Natural Science Foundation of China (41474063, 41431070 and 41674006).
Appendix A. Eigenvalue decomposition of the noise covariance matrix
A statistically optimal inversion of gravity disturbances into mass anomalies per mascon requires the inversion of the noise covariance matrix . Since this matrix is ill-conditioned some type of regularization is needed. Here, we use an eigenvalue decomposition
| 25 |
To minimize the loss of significant digits during the computations, we do not compute explicitly the noise covariance matrix, but apply the following procedure.
We start with Eq. (2) in matrix-vector form:
| 26 |
where the vector comprises the SHCs of a monthly GRACE solution (, ) and is the matrix of spherical harmonic synthesis that maps SHCs into gravity disturbances. If the noise covariance matrix of the SHCs is and no constraints are applied when estimating the SHCs,
| 27 |
where is the normal matrix exploited in the computation of SHCs from GRACE level-1b data. The Cholesky decomposition of this matrix is:
| 28 |
According to the law of covariance propagation, the noise covariance matrices and are related to each other as
| 29 |
Substitution of Eqs. (27) and (28) into Eq. (29) gives
| 30 |
where
| 31 |
Let
| 32 |
be the SVD of the matrix , where is the matrix of singular values and and are the matrices of left and right singular vectors, respectively. Equation (32) and the equality
| 33 |
allow Eq. (30) to be rewritten as
| 34 |
It is easy to see that is a square diagonal matrix with elements defined as
| 35 |
where are the singular values forming the matrix and is the number of data points. Therefore, the representation of matrix given by Eq. (34) satisfies the properties of the eigendecomposition, so that are the eigenvalues of ,
| 36 |
Thus, the operations prescribed by Eqs. (28), (31), (32) and (36) provide the eigenvalue decomposition of the matrix without the need to compute this matrix explicitly.
In order to demonstrate the superior stability of the proposed computational procedure, we perform the following experiment. We use the normal equation matrix for the monthly GRACE solution of August 2006 from DMT. We compute explicitly the noise covariance matrix and perform an eigenvalue decomposition of this matrix. Alternatively, we follow the procedure outlined before. Figure 18 shows the eigenvalues of for both procedures. The direct computation of the eigenvalues of provides only the first 900 eigenvalues. The flattening of the eigenvalue spectrum beyond an index of about 900 is caused by numerical round-off errors and is at the level of the largest eigenvalue times machine epsilon for IEEE double-precision arithmetic. Using the proposed procedure allows to compute the first 1400 eigenvalues before numerical round-off errors become dominant. From this we conclude that the proposed procedure is numerically more stable and, therefore, better suited to deal with ill-conditioned noise covariance matrices when computing a weighted least-squares solution.
Fig. 18.

Eigenvalues of the matrix computed directly (blue) and using the procedure suggested in this study (red). The singular values of the matrix are shown in green
References
- A G, Wahr J, Zhong S. Computations of the viscoelastic response of a 3-D compressible Earth to surface loading: an application to Glacial Isostatic Adjustment in Antarctica and Canada. Geophys J Int. 2013;192(2):557–572. doi: 10.1093/gji/ggs030. [DOI] [Google Scholar]
- Baur O. Greenland mass variation from time-variable gravity in the absence of GRACE. Geophys Res Lett. 2013;40(16):4289–4293. doi: 10.1002/grl.50881. [DOI] [Google Scholar]
- Baur O, Sneeuw N. Assessing Greenland ice mass loss by means of point-mass modeling: a viable methodology. J Geod. 2011;85(9):607–615. doi: 10.1007/s00190-011-0463-1. [DOI] [Google Scholar]
- Beighley RE, Ray RL, He Y, Lee H, Schaller L, Andreadis KM, Durand M, Alsdorf DE, Shum CK. Comparing satellite derived precipitation datasets using the Hillslope River Routing (HRR) model in the Congo River Basin. Hydrol Process. 2011;25(20):3216–3229. doi: 10.1002/hyp.8045. [DOI] [Google Scholar]
- Bettadpur S (2012) UTCSR level-2 processing standards document for level-2 product release 0005. GRACE 327742, CSR Publ. GR-12-xx, Rev. 4.0, University of Texas at Austin, Tech. rep
- Bonin J, Chambers D. Uncertainty estimates of a GRACE inversion modelling technique over Greenland using a simulation. Geophys J Int. 2013;194(1):212–229. doi: 10.1093/gji/ggt091. [DOI] [Google Scholar]
- Chen J, Rodell M, Wilson C, Famiglietti J (2005) Low degree spherical harmonic influences on Gravity Recovery and Climate Experiment (GRACE) water storage estimates. Geophys Res Lett 32(14):
- Cheng M, Tapley BD, Ries JC. Deceleration in the Earth’s oblateness. J Geophys Res Solid Earth. 2013;118(2):740–747. doi: 10.1002/jgrb.50058. [DOI] [Google Scholar]
- Condi F, Ries J, Tapley B (2004) The new GRACE gravity mission and its value to exploration. In: SEG Technical Program Expanded Abstracts 2004. Society of Exploration Geophysicists, pp 728–729
- Dahle C, Flechtner F, Gruber C, König D, König R, Michalak G, Neumayer K-H (2012) GFZ GRACE level-2 processing standards document for level-2 product release 0005. Technical report. doi:10.2312/GFZ.b103-1202-25
- De Linage C, Rivera L, Hinderer J, Boy J-P, Rogister Y, Lambotte S, Biancale R. Separation of coseismic and postseismic gravity changes for the 2004 Sumatra–Andaman earthquake from 4.6 yr of GRACE observations and modelling of the coseismic change by normal-modes summation. Geophys J Int. 2009;176(3):695–714. doi: 10.1111/j.1365-246X.2008.04025.x. [DOI] [Google Scholar]
- Ditmar P, Teixeira da Encarnação J, Farahani HH. Understanding data noise in gravity field recovery on the basis of inter-satellite ranging measurements acquired by the satellite gravimetry mission GRACE. J Geod. 2012;86(6):441–465. doi: 10.1007/s00190-011-0531-6. [DOI] [Google Scholar]
- Dobslaw H, Flechtner F, Bergmann-Wolf I, Dahle C, Dill R, Esselborn S, Sasgen I, Thomas M. Simulating high-frequency atmosphere–ocean mass variability for dealiasing of satellite gravity observations: AOD1B RL05. J Geophys Res Oceans. 2013;118(7):3704–3711. doi: 10.1002/jgrc.20271. [DOI] [Google Scholar]
- Duan XJ, Guo JY, Shum CK, van der Wal W. On the postprocessing removal of correlated errors in GRACE temporal gravity field solutions. J Geod. 2009;83(11):1095–1106. doi: 10.1007/s00190-009-0327-0. [DOI] [Google Scholar]
- Felikson D, Urban TJ, Pie N, Gunter BC, Harpold R, Schutz BE (2016) Comparison of elevation change detection methods from ICESat altimetry over the Greenland and Antarctic ice sheets. Transa Geosci Remote Sens (submitted)
- Forsberg R, Reeh N (eds) (2007) Mass change of the Greenland ice sheet from GRACE, vol 73. In: Gravity field of the Earth 1st meeting of the International Gravity Field Service, Harita Dergisi, Ankara
- Forsberg R, Sørensen L, Simonsen S. Greenland and antarctica ice sheet mass changes and effects on global sea level. Surv Geophys. 2017;38(1):89–104. doi: 10.1007/s10712-016-9398-7. [DOI] [Google Scholar]
- González Á. Measurement of areas on a sphere using Fibonacci and latitude–longitude lattices. Math Geosci. 2010;42(1):49–64. doi: 10.1007/s11004-009-9257-x. [DOI] [Google Scholar]
- Jekeli C. Modifying Stokes’ function to reduce the error of geoid undulation computations. J Geophys Res. 1981;86(B8):6985–6990. doi: 10.1029/JB086iB08p06985. [DOI] [Google Scholar]
- Koch K-R, Kusche J. Regularization of geopotential determination from satellite data by variance components. J Geod. 2002;76(5):259–268. doi: 10.1007/s00190-002-0245-x. [DOI] [Google Scholar]
- Longuevergne L, Scanlon BR, Wilson CR. Grace hydrological estimates for small basins: evaluating processing approaches on the high plains aquifer, USA. Water Resour Res. 2010;46(11):W11517. doi: 10.1029/2009WR008564. [DOI] [Google Scholar]
- Luthcke SB, Zwally HJ, Abdalati W, Rowlands DD, Ray RD, Nerem RS, Lemoine FG, McCarthy JJ, Chinn DS. Recent Greenland ice mass loss by drainage system from satellite gravity observations. Science. 2006;314(October):1286–1289. doi: 10.1126/science.1130776. [DOI] [PubMed] [Google Scholar]
- Luthcke SB, Sabaka TJ, Loomis BD, Arendt AA, McCarthy JJ, Camp J. Antarctica, Greenland and Gulf of Alaska land-ice evolution from an iterated GRACE global mascon solution. J Glaciol. 2013;59(216):613–631. doi: 10.3189/2013JoG12J147. [DOI] [Google Scholar]
- Noël B, van de Berg W J, van Meijgaard E, Kuipers Munneke P, van de Wal R S W, van den Broeke M R. Evaluation of the updated regional climate model RACMO2.3: summer snowfall impact on the Greenland Ice Sheet. Cryosphere. 2015;9(5):1831–1844. doi: 10.5194/tc-9-1831-2015. [DOI] [Google Scholar]
- Ramillien G, Cazenave A, Brunau O. Global time variations of hydrological signals from GRACE satellite gravimetry. Geophys J Int. 2004;158(3):813–826. doi: 10.1111/j.1365-246X.2004.02328.x. [DOI] [Google Scholar]
- Savcenko R, Bosch W (2010) EOT11a empirical ocean tide model from multi-mission satellite altimetry. Technical report. Report No 89, 10013/epic.43894.d001
- Save H, Bettadpur S, Tapley BD. High-resolution CSR GRACE RL05 mascons. J Geophys Res Solid Earth. 2016;121(10):7547–7569. doi: 10.1002/2016JB013007. [DOI] [Google Scholar]
- Schrama EJO, Wouters B. Revisiting Greenland ice sheet mass loss observed by GRACE. J Geophys Res Solid Earth. 2011;116(2):B02407. [Google Scholar]
- Schrama EJO, Wouters B, Rietbroek R. A mascon approach to assess ice sheet and glacier mass balances and their uncertainties from GRACE data. J Geophys Res Solid Earth. 2014;119(7):6048–6066. doi: 10.1002/2013JB010923. [DOI] [Google Scholar]
- Siemes C, Ditmar P, Riva REM, Slobbe DC, Liu XL, Farahani HH. Estimation of mass change trends in the Earth’s system on the basis of GRACE satellite data, with application to Greenland. J Geod. 2013;87(1):69–87. doi: 10.1007/s00190-012-0580-5. [DOI] [Google Scholar]
- Stedinger JR, Tasker GD. Regional hydrologic analysis, 2, model-error estimators, estimation of sigma and log-Pearson type 3 distributions. Water Resour Res. 1986;22(10):1487–1499. doi: 10.1029/WR022i010p01487. [DOI] [Google Scholar]
- Swenson S, Wahr J. Post-processing removal of correlated errors in GRACE data. Geophys Res Lett. 2006;33(8):L08402. doi: 10.1029/2005GL025285. [DOI] [Google Scholar]
- Swenson S, Chambers D, Wahr J. Estimating geocenter variations from a combination of GRACE and ocean model output. J Geophys Res Solid Earth. 2008;113(B8):B08410. doi: 10.1029/2007JB005338. [DOI] [Google Scholar]
- Thompson PF, Bettadpur S, Tapley BD. Impact of short period, non-tidal, temporal mass variability on GRACE gravity estimates. Geophys Res Lett. 2004;31(6):L06619. doi: 10.1029/2003GL019285. [DOI] [Google Scholar]
- van den Broeke M, Bamber J, Ettema J, Rignot E, Schrama E, van de Berg WJ, van Meijgaard E, Velicogna I, Wouters B. Partitioning recent Greenland mass loss. Science. 2009;326(5955):984–6. doi: 10.1126/science.1178176. [DOI] [PubMed] [Google Scholar]
- Velicogna I, Sutterley TC, Broeke MRVD. Regional acceleration in ice mass loss from Greenland and Antarctica using GRACE time-variable gravity data. Geophys Res Lett. 2014;41:8130–8137. doi: 10.1002/2014GL061052. [DOI] [Google Scholar]
- Wahr J, Molenaar M, Bryan F. Time variability of the Earth’s gravity field: hydrological and oceanic effects and their possible detection using GRACE. J Geophys Res Solid Earth. 1998;103(B12):30205–30229. doi: 10.1029/98JB02844. [DOI] [Google Scholar]
- Wahr J, Wingham D, Bentley C. A method of combining ICESat and GRACE satellite data to constrain Antarctic mass balance. J Geophys Res Solid Earth. 2000;105(B7):16279–16294. doi: 10.1029/2000JB900113. [DOI] [Google Scholar]
- Wahr J, Swenson S, Velicogna I. Accuracy of GRACE mass estimates. Geophys Res Lett. 2006;33(6):L06401. doi: 10.1029/2005GL025305. [DOI] [Google Scholar]
- Watkins MM, Wiese DN, Yuan D-N, Boening C, Landerer FW. Improved methods for observing Earth’s time variable mass distribution with GRACE using spherical cap mascons. J Geophys Res Solid Earth. 2015;120(4):2648–2671. doi: 10.1002/2014JB011547. [DOI] [Google Scholar]
- Wiese D (2015) GRACE monthly global water mass grids NETCDF RELEASE 5.0. ver. 5.0, PO. DAAC, CA, Accessed doi:10.5067/TEMSC-OCL05
- Wiese DN, Landerer FW, Watkins MM. Quantifying and reducing leakage errors in the jpl rl05m grace mascon solution. Water Resour Res. 2016;52(9):7490–7502. doi: 10.1002/2016WR019344. [DOI] [Google Scholar]
- Wouters B, Chambers D, Schrama EJO. GRACE observes small-scale mass loss in Greenland. Geophys Res Lett. 2008;35(20):L20501. doi: 10.1029/2008GL034816. [DOI] [Google Scholar]
- Xu G. Sciences of geodesy-I: advances and future directions. Berlin: Springer; 2010. [Google Scholar]