

Abstract
In this paper, we study a susceptible-infectious-recovered (SIRS) epidemic model with a generalized nonmonotone and saturated incidence rate , in which the infection function first increases to a maximum when a new infectious disease emerges, then decreases due to psychological effect, and eventually tends to a saturation level due to crowding effect. It is shown that there are a weak focus of multiplicity at most two and a cusp of codimension at most two for various parameter values, and the model undergoes saddle-node bifurcation, Bogdanov-Takens bifurcation of codimension two, Hopf bifurcation, and degenerate Hopf bifurcation of codimension two as the parameters vary. It is shown that there exists a critical value for the psychological effect, and two critical values for the infection rate such that: (i) when , or and , the disease will die out for all positive initial populations; (ii) when and , the disease will die out for almost all positive initial populations; (iii) when and , the disease will persist in the form of a positive coexistent steady state for some positive initial populations; and (iv) when and , the disease will persist in the form of multiple positive periodic coexistent oscillations and coexistent steady states for some positive initial populations. Numerical simulations, including the existence of one or two limit cycles and data-fitting of the influenza data in Mainland China, are presented to illustrate the theoretical results.
Keywords: SIRS epidemic model, Saddle-node bifurcation, Bogdanov-Takens bifurcation, Hopf bifurcation, Degenerate Hopf bifurcation
1. Introduction
In the classical infectious disease transmission models (Kermack and McKendrick [16], Hethcote [12]), the population is divided into three classes labeled by , and , representing the numbers of susceptible, infective, and recovered or removed individuals at time t, respectively. Assuming the recovered individuals have temporary immunity, the classical susceptible-infectious-recovered (SIRS) model can be written as follows:
| (1.1) |
where b is the recruitment rate of the population, d is the natural death rate of the population, μ is the natural recovery rate of the infective individuals, δ is the rate at which recovered individuals lose immunity and return to the susceptible class. is called the incidence rate, and is a function to measure the infection force of a disease.
The incidence rate plays a very important role in describing the evolution of infectious disease. In [16] Kermack and McKendrick assumed that the incidence rate is bilinear, i.e.,
| (1.2) |
where is unbounded when . The bilinear incidence rate (1.2) might be true when the number of the infective individuals is small, but it becomes unrealistic when is getting larger. Studying the data on the cholera epidemic spread in Bari, Italy, in 1973, Capasso et al. [5] and Capasso and Serio [6] proposed two types of nonlinear incidence rates, namely a saturated incidence rate and an incidence rate taking psychological effect into account (see Fig. 1.1 ).
Fig. 1.1.

Two types of nonlinear incidence function g(I). (a) A saturated incidence function; (b) An incidence function with psychological effect.
(a) Saturated Incidence Rates. To compare with the bilinear incidence rate (1.2), Capasso and Serio [6] proposed a saturated incidence rate of the following form:
| (1.3) |
where kI measures the infection force of the disease and measures the inhibition effect from the behavioral change of the susceptible individuals when their number increases or from the crowding effect of the infective individuals (Ruan and Wang [25]). Notice that the nonlinear incidence function eventually tends to a saturation level when I is getting larger.
The general incidence rate
| (1.4) |
was proposed by Liu et al. [20] () and Hethcote and van den Driessche [13] (), and used by a number of authors, see, for example, Alexander and Moghadas [1], [2], Derrick and van den Driessche [9], [10], Li et al. [17], Liu et al. [19], Lizana and Rivero [21], Moghadas and Alexande [22], and Wang [28]. According to Tang et al. [27] and Hu et al. [14], the incidence function includes three types: (i) unbounded incidence function: ; (ii) saturated incidence function: ; and (iii) nonmonotone incidence function: . In order to better understand the generic bifurcations in SIRS models with saturated incidence rates, Ruan and Wang [25] studied model (1.1) with a specific nonlinear incidence rate,
| (1.5) |
and presented a detailed qualitative and bifurcation analysis of the model.
(b) Nonmonotone Incidence Rates with Psychological Effect. Though Capasso and Serio [6] described incidence functions taking into account psychological effect, but they did not give any specific function to describe such incidence. To model the effects of psychological factor, protection measures and intervention policies when a serious disease emerges, Xiao and Ruan [29] proposed the following specific incidence rate:
| (1.6) |
where the incidence function is nonmonotone when (see Fig. 1.1(b)). This implies that the contact rate and the infection probability are increasing when a new infectious disease emerges, since people have very little knowledge about the disease. However, when I is large and the disease becomes more serious, psychological factor leads people to implementing measures to control the spread of the disease. For example, in the outbreak of severe acute respiratory syndrome (SARS), the aggressive measures and policies, such as border screening, mask wearing, quarantine, isolation, etc. were proved to be very effective in reducing the transmission. So the infection force decreases when the number of infected individuals becomes larger. Liu et al. [18] used (1.6) to describe the psychological effect toward avian influenza in the human population. In [29], Xiao and Ruan presented a global analysis for model (1.1) with nonmonotone incidence rate (1.6), and showed that either the number of infective individuals tends to zero as time evolves or the disease persists. Hence, model (1.1) with nonmonotone incidence rate (1.6) cannot exhibit complicated dynamics and bifurcations.
Xiao and Zhou [30] considered a complete form of the nonmonotone incidence rate (1.6) as follows:
| (1.7) |
where β is a parameter such that for all , hence, . They presented qualitative analysis of model (1.1) with nonmonotone incidence rate (1.7) and showed the existence of bistable phenomenon and periodic oscillation. Zhou et al. [32] further studied the existence of different kinds of bifurcations, such as Hopf and Bogdanov-Takens bifurcations.
(c) Nonmonotone and Saturated Incidence Rates. Note that both nonmonotone incidence functions and , given in (1.6) and (1.7), tend to zero when I goes to infinite, which indicates that the psychological or inhibitory effect from the behavioral change of the susceptible individuals or from the crowding effect of the infective individuals is too strong, which may be unreasonable for some specific infectious diseases, such as influenza. Thus, a more reasonable incidence function may be one that first increases to a maximum when a new infectious disease emerges or an old infectious disease reemerges, then decreases due to psychological effect, and eventually tends to a saturation level due to crowding effect. On the other hand, in some specific infectious diseases, the incidence rate may not be monotonic or non-monotonic alone, a more general incidence rate may have a combination of monotonicity, nonmonotonicity and saturation properties.
Based on the above discussions, in this paper, we propose the following general nonmonotone and saturated incidence rate:
| (1.8) |
where is a parameter which measures the psychological or inhibitory effect, and k is the infection rate. β is a parameter such that for all , hence, . When , is monotonic, always increases and then tends to a saturated level as I goes to infinite. When , is nonmonotonic, increases when I is small and decreases when I is large, and finally tends to a saturated level as I goes to infinite (see Fig. 1.2 ). It can be seen from Fig. 1.2 that when α and k are fixed, increases faster for smaller β when I is small, and then decreases to the same fixed value for any β.
Fig. 1.2.
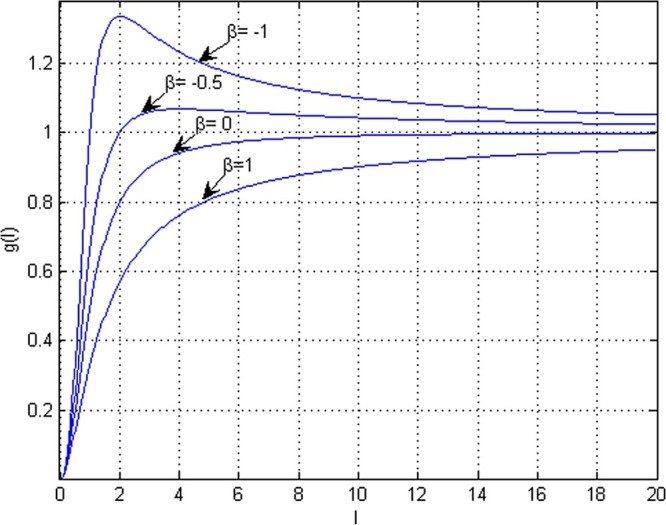
Properties of function g(I) in (1.8) for α = 1, k = 1 with β = −1,−0.5,0,1.
When , the general incidence rate (1.8) becomes the saturated incidence rate (1.5). Ruan and Wang [25] studied model (1.1) with incidence rate (1.5) and presented a detailed qualitative and bifurcation analysis of the model. They showed that the system undergoes Bogdanov-Takens bifurcation of codimension two and Hopf bifurcation of codimension one, but the exact codimension of Hopf bifurcation remains unknown. In [27], Tang et al. proved that the maximal multiplicity of the weak focus is two by complex algebraic calculations but did not give the explicit conditions for degenerate Hopf bifurcation. Moreover, they claimed the existence of Bogdanov-Takens bifurcation of codimension three. They also conjectured that model (1.1) with nonmonotone incidence rate would not exhibit complicated dynamics and bifurcations.
In this paper, for the case we find that model (1.1) with general incidence rate (1.8) can exhibit complicated dynamical behaviors and bifurcation phenomena. More precisely, we will show that there are a weak focus of multiplicity at most two and a cusp of codimension at most two for various parameter values, and the model undergoes saddle-node bifurcation, Bogdanov-Takens bifurcation of codimension two, Hopf bifurcation, and degenerate Hopf bifurcation of codimension two as the parameters vary. By considering a more general model, our results show that Bogdanov-Takens bifurcation of codimension higher than two cannot occur, which clarifies and corrects the corresponding results obtained by Tang et al. [27], who claimed the existence of Bogdanov-Takens bifurcation of codimension three. Moreover, our results about degenerate Hopf bifurcation of codimension two can be seen as a complement of the results obtained by Ruan and Wang [25], who only discussed the Hopf bifurcation of codimension one. Furthermore, it is shown that there exists a critical value for the psychological or inhibitory effect, and two critical values for the infection rate such that: (i) when , or and , the disease will die out for all positive initial populations; (ii) when and , the disease will die out for almost all positive initial populations; (iii) when and , the disease will persist in the form of a positive coexistent steady state for some positive initial populations; and (iv) when and , the disease will persist in the form of multiple positive periodic coexistent oscillations and coexistent steady states for some positive initial populations.
The rest of the paper is organized as follows. In section 2, we carry out a qualitative analysis to give the types and stability of equilibria of model (1.1) with general incidence rate (1.8). In section 3, we show that the model undergoes saddle-node bifurcation, Bogdanov-Takens bifurcation of codimension at most two, Hopf bifurcation, and degenerate Hopf bifurcation of codimension at most two as parameters vary. In section 4 we use the model to simulate the influenza data in Mainland China from 2004 to 2017. Conclusion and discussion are given in section 5.
2. Types and stability of equilibria
We consider an SIRS epidemic model in the following form
| (2.1) |
under the initial conditions , , , where , and denote the numbers of susceptible, infective, and recovered individuals at time t, respectively, is the recruitment rate of the population, is the natural death rate of the population, is the infection rate, is the natural recovery rate of the infective individuals, is the rate at which recovered individuals lose immunity and return to the susceptible class, is a parameter which measures the psychological or inhibitory effect, and such that for all .
To study the dynamics of model (2.1), we first present a lemma.
Lemma 2.1
The plane is an invariant manifold of system (2.1) , which is attracting in the first octant.
Proof
Summing up the three equations in (2.1) and denoting , we have
It is clear that is a solution and for any , the general solution is
Thus,
which implies the conclusion. □
It is clear that the limit set of system (2.1) is on the plane . Thus, we focus on the reduced system
| (2.2) |
We know that the positively invariant set of system (2.2) is
System (2.2) always has an equilibrium which corresponds to the disease-free equilibrium of system (2.1). To find the endemic equilibria, we rescale (2.2) by using
Then we obtain (for simplicity we still denote τ by t)
| (2.3) |
where
It can be seen that
| (2.4) |
and the positively invariant region of system (2.3) is
since is an invariant line, and when , we have .
To find the positive equilibria of system (2.3), we set
| (2.5) |
which yield
| (2.6) |
We can see from (2.5) and (2.6) that system (2.3) has at most two positive equilibria and , which may coalesce into a unique positive equilibrium , where
The discriminant of (2.6) is
and we have
Note that is equivalent to . Let
| (2.7) |
Then we have the following existence conditions of equilibria in system (2.3).
Theorem 2.2
Model (2.3) always has an equilibrium . Moreover,
Next we study local stability of equilibria of system (2.3). We first study the disease-free equilibrium . The Jacobian matrix of system (2.3) at is
which has two eigenvalues . We obtain the following result.
Theorem 2.3
The disease-free equilibrium of system (2.3) is a stable hyperbolic node. A phase portrait is shown in Fig. 2.1 .
Fig. 2.1.

The phase portrait of system (2.3) with no positive equilibria for A = 2, m = −5, p = 2, q = 1.4, n = 9.
To discuss whether the disease can invade the population, we study the global stability of the equilibrium . Since is an invariant line and is positively invariant, by index theory, we can conclude that system (2.3) does not have nontrivial periodic orbits in when system (2.3) has no positive equilibria.
Theorem 2.4
The disease-free equilibrium of (2.1) is globally asymptotical stable in the interior and the disease cannot invade the population if , or and .
Remark 2.1
From Theorem 2.4 and system (2.3), we can see that is equivalent to , where
(2.8) while and are equivalent to and , where
(2.9) These indicate that the disease will die out for all positive initial populations when the psychological or inhibitory effect α is greater than a critical value , or the psychological effect α is smaller than the critical value and the infection rate k is also smaller than a critical value .
Now we consider the positive equilibria of system (2.3). The positive equilibria with coordinates satisfy
and the Jacobian matrix of system (2.3) at a positive equilibrium is given by
Then the determinant of is
and its sign is determined by
| (2.10) |
The trace of is
and its sign is determined by
| (2.11) |
To discuss the topological type of the positive equilibria of system (2.3), we let
| (2.12) |
which will be used in the following theorem.
Theorem 2.5
When , and conditions (2.4) are satisfied, system (2.3) has a unique positive equilibrium . Moreover,
- (I)
if , then is a saddle-node, which is attracting (or repelling) if (or );
- (II)
if , then is a cusp of codimension two.
The phase portraits are shown in Fig. 2.2 .
Fig. 2.2.

The phase portraits of system (2.3) with a unique positive equilibrium: (a) an attracting saddle-node for A = 2, m = −5, p = 2, q = 1, n = 8; (b) a repelling saddle-node for A = 2, m = −5, p = 2, q = 3, n = 7; (c) a cusp of codimension two for .
Proof
Substituting and into and , we deduce that and
Letting , we have
Then, using Theorem 7.1 in Zhang et al. [33], we obtain the conclusion in (I).
To show that the assertion (II) holds, let , , and . Then using Taylor expansions, we can rewrite system (2.3) as follows (for simplicity, we still denote X, Y by x, y, respectively)
(2.13) where
Next let , . Then system (2.13) is transformed into (we still denote X, Y by x, y, respectively)
(2.14) By Remark 1 of section 2.13 in [24] (see also [15]), we obtain an equivalent system of (2.14) in the small neighborhood of as follows:
(2.15) where
It is seen that because . We next prove (i.e., ) by contradiction. Supposing and substituting it into and , we obtain
(2.16) Further, since , and , it follows from (2.16) that
However, if , which results in a contradiction. Thus (i.e., ). By the results in [15], is a cusp of codimension two. □
Remark 2.2
When (i.e., ), our system (2.2) is reduced to system (1.3) in [27], our Theorem 2.5 (II) indicates that Bogdanov-Takens bifurcation of codimension higher than two cannot occur around , which clarifies and corrects the corresponding results in [27], where the authors claimed the existence of Bogdanov-Takens bifurcation of codimension three.
Remark 2.3
When the psychological effect α equals the critical value given by (2.8), Theorem 2.5 implies that whether the disease persists or dies out will depend on the infection rate and the initial population. More precisely, when the psychological effect α equals the critical value and the infection rate k is greater than the first critical value given by (2.9), i.e., and , then system (2.1) has two equilibria, a disease-free equilibrium and an endemic equilibrium. Moreover, from Fig. 2.2 (b) and (c), we can see that the disease will die out for almost all positive initial populations if the infection rate k is less than another larger critical value
(2.17) and the disease will persist to a positive coexistent steady state for some positive initial population if the infection rate k is greater than the second critical value (, i.e. ), as shown in Fig. 2.2 (a).
Theorem 2.6
When , and conditions (2.4) are satisfied, then system (2.3) has two positive equilibria and . Moreover, is always a hyperbolic saddle and is
- (i)
a stable hyperbolic focus (or node) if ; or
- (ii)
a weak focus (or a center) if ; or
- (iii)
an unstable hyperbolic focus (or node) if ,
where is given in (2.11) .
Proof
To determine the types of and , it is suffice to consider the signs of , and , where and are given in (2.10) and (2.11), respectively, from which we have
On the other hand, since and are two different positive roots of (2.6), we have
(2.18)
(2.19) yielding and . Hence we obtain the types of and . □
Remark 2.4
It is seen from Theorem 2.6 that when the psychological effect α is smaller than the critical value but the infection rate k is greater than the first critical value , i.e., and , then the disease will become more severe because of the existence of multiple positive coexistent steady states.
3. Bifurcation analysis
From Theorem 2.2, Theorem 2.5, Theorem 2.6, we know that system (2.3) may exhibit saddle-node bifurcation, Bogdanov-Takens bifurcation around the equilibrium , and Hopf bifurcation around the equilibrium . In this section, we investigate various possible bifurcations in system (2.3).
3.1. Saddle-node bifurcation
From Theorem 2.2, Theorem 2.5, Theorem 2.6, we know that the surface
is the saddle-node bifurcation surface. When the parameters are varied to cross the surface from one side to the other side, the number of positive equilibria of system (2.3) changes from zero to two, the saddle-node bifurcation yields two positive equilibria. This implies that there exists a critical psychological effect value such that the disease cannot invade the population when (i.e., ), and the disease will persist for some positive initial populations when (i.e., ).
3.2. Bogdanov-Takens bifurcation
In this subsection, we discuss if system (2.3) undergoes Bogdanov-Takens Bifurcation of codimension two under a small parameter perturbation if the bifurcation parameters are chosen suitably. Actually, we have the following theorem.
Theorem 3.1
When , , and conditions (2.4) hold, system (2.3) has a cusp of codimension two (i.e., Bogdanov-Takens singularity). If we choose A and q as bifurcation parameters, then (2.3) undergoes Bogdanov-Takens bifurcation of codimension two in a small neighborhood of the unique positive equilibrium . Hence, there exist some parameter values such that system (2.3) has an unstable limit cycle, and there exist some other parameter values such that system (2.3) has an unstable homoclinic loop.
Proof
Consider
(3.1) where and are parameters in a small neighborhood of . We are interested only in the phase portraits of system (3.1) when x and y lie in a small neighborhood of the interior equilibrium .
Let , . Then system (3.1) can be rewritten as (for simplicity, we still denote X, Y by x, y, respectively)
(3.2) where is a function at least of third order with respect to , whose coefficients depend smoothly on and , and
Let
and rewrite X, Y as x, y, respectively. Then system (3.2) becomes
(3.3) where is a function at least of third order with respect to , whose coefficients depend smoothly on and , and
Next let , under which system (3.3) becomes (still denote τ by t)
(3.4) Letting , , and rewriting X, Y as x, y, respectively, we obtain
(3.5) where is a function at least of third order with respect to , whose coefficients depend smoothly on and , and
Note that when ,
Further, let
Then system (3.5) can be rewritten as (still denote X, Y by x, y, respectively)
(3.6) where is a function at least of third order with respect to , whose coefficients depend smoothly on and , and
Making the final change of variables by setting
then we finally obtain (still denote X, Y and τ by x, y and t, respectively)
(3.7) where is a function at least of third order with respect to , whose coefficients depend smoothly on and , and
We can express and in terms of and as follows:
(3.8) where
Since
for , , and , the parameter transformation (3.8) is a homeomorphism in a small neighborhood of the origin, and and are independent parameters.
The results in Bogdanov [3], [4] and Takens [26] now imply that system (3.7) (i.e., (3.1) or (2.3)) undergoes Bogdanov-Takens bifurcation when changes in a small neighborhood of . □
By the results of Perko [24], we obtain the following local representations of the bifurcation curves up to second-order approximations:
(i) The saddle-node bifurcation curve is
(ii) The Hopf bifurcation curve is
(iii) The homoclinic bifurcation curve is
The Bogdanov-Takens bifurcation diagram and corresponding phase portraits of system (3.1) are given in Fig. 3.1 , where we fix , , , and , which satisfy , , and conditions (2.4), and then perturb A and q. The bifurcation curves and SN divide the small neighborhood of the origin in the parameter -plane into four regions (see Fig. 3.1(a)).
Fig. 3.1.

The bifurcation diagram and phase portraits of system (3.1) for A = 2, m = −1, p = 2, q = 1/3, n = 1/3. (a) Bifurcation diagram; (b) No positive equilibria when (λ1,λ2)=(0.1,0.11) lies in the region I; (c) An unstable focus when (λ1,λ2)=(0.1,0.1005) lies in the region II; (d) An unstable limit cycle when (λ1,λ2)=(0.1,0.0996) lies in the region III; (e) An unstable homoclinic loop when (λ1,λ2)=(0.1,0.09905427) lies on the curve HL; (f) A stable focus when (λ1,λ2)=(0.1,0.0983) lies in the region IV.
(a) When , the unique positive equilibrium is a cusp of codimension two (see Fig. 2.2(c)).
(b) There are no equilibria when the parameters lie in region I (see Fig. 3.1(b)), implying that the disease dies out.
(c) When the parameters lie on the curve SN, there is a unique positive equilibrium , which is a saddle-node.
(d) Two positive equilibria, one is an unstable focus and the other is a saddle , will occur through the saddle-node bifurcation when the parameters cross the SN curve into region II (see Fig. 3.1(c)).
(e) An unstable limit cycle will appear through the subcritical Hopf bifurcation around when the parameters are varied to cross the H curve into region III (see Fig. 3.1(d)), where the focus is stable, whereas the focus is an unstable one with multiplicity one when the parameters lie on the curve H.
(f) An unstable homoclinic orbit will occur through the homoclinic bifurcation around when the parameters pass region III and lie on the curve HL (see Fig. 3.1(e)).
(g) The relative location of one stable and one unstable manifold of the saddle will be reversed when the parameters are varied to cross the HL curve into region IV (compare Fig. 3.1(c) and Fig. 3.1(f)).
3.3. Hopf bifurcation
In this subsection we discuss Hopf bifurcation around the equilibrium . Let
| (3.9) |
which will be used in the following subsection.
To simplify the computation, by following the technique in [11], we reduce system (2.3) to an equivalent polynomial differential system by using the following state variable scaling and time rescaling:
| (3.10) |
under which system (2.3) is transformed into (we still denote τ by t)
| (3.11) |
Then taking the parameter scaling,
into system (3.11) and dropping the bars, we obtain
| (3.12) |
Since system (3.12) has an equilibrium (i.e., of system (2.3)), we have
Note that for system (2.3), which becomes under the parameter scaling (3.10), dropping the bars, so we have because . Regarding the above parameter scaling, the condition (2.4), and become
| (3.13) |
Since the transformation (3.10) is a linear sign-reserving transformation, system (3.12) and system (2.3) have the same qualitative property.
Next letting and substituting into (3.12), we obtain (still denote τ by t)
| (3.14) |
where m, p, q, n, a satisfy (3.13). Obviously system (3.14) has the same topological structure as that of system (3.12), since we consider system (3.12) in , and holds for all . In the following, we study the Hopf bifurcation around in system (3.14), which corresponds to the Hopf bifurcation around in system (2.3).
Theorem 3.2
When conditions in (3.13) hold, system (3.14) has an equilibrium at . Moreover,
- (I)
when , is an unstable hyperbolic node or focus;
- (II)
when , is a locally asymptotically stable hyperbolic node or focus;
- (III)
when , is a fine focus or center.
Proof
The Jacobian matrix of system (3.14) at is
Then the determinant of is
and the trace of is
By conditions in (3.13), we can see that and (>0 or <0) if ( or ), so the conclusions follow. □
Next we continue to consider the case (III) of Theorem 3.1 and study Hopf bifurcation around in system (3.14). We have the following necessary conditions for Hopf bifurcation:
| (3.15) |
Firstly we can check the transversality condition
We investigate the nondegenerate condition and stability of the bifurcating periodic orbit from the positive equilibrium of system (3.14) by calculating the first Lyapunov coefficient.
Let , , and . Then system (3.14) can be written as (still denote X, by x, , respectively)
| (3.16) |
where . Let , and make a transformation of , and , then system (3.16) becomes (we still denote X, Y by x, y, respectively)
| (3.17) |
where
and
Using the formula in [33] and calculating first Lyapunov coefficient with the aid of MATLAB, we obtain
| (3.18) |
where , , , , and are given in (3.9). By conditions in (3.15), the sign of is the same as that of
| (3.19) |
Now we investigate the sign of (i.e., ) and will see that there exist some values of parameters such that (i.e., ) when conditions (3.15) are satisfied. We first give the following Lemma.
Lemma 3.3
When conditions (3.15) are satisfied, then , where are given in (3.9) .
Proof
By conditions (3.15), it is easy to show that and
Then we have
where and are given in (3.9).
(I) Firstly, we consider the discriminant of , which is given by
where
We consider the third derivative of with respect to p, which is given by
Because , we can show that when . Thus
On the other hand, we have , and so
Similarly, we have and , which yield
(II) Secondly, we analyze the sign of , which is same as
By noticing and using a simple analysis, we have
Thus, we can see that , and if and only if , and , respectively, where .
(III) Thirdly, we analyze the relationship between and , . The sign of is the same as that of
The first derivative of with respect to p is
Since and , one can prove that . Moreover, we have . Thus we have , i.e., , when conditions (3.15) are satisfied.
The sign of is the same as that of
Since , by a direct computation, we can show that
and
It then follows that , i.e., , when conditions (3.15) are satisfied.
(IV) Finally, we show that when conditions (3.15) are satisfied. When , we have by the step (II), then and by the step (III). Moreover, we can show that . In fact, the sign of is the same as that of
By a direct computation with conditions in (3.15), we have
where
We can see that is monotonic decreasing for . Moreover, since and , we have (i.e., ) when , and thus , i.e., , when .
When , we have by the step (II), then and by the step (III). Moreover, we can show that . In fact, the sign of is same as
By direct computation, we have and . Then , i.e., , when .
Summarizing the above results, we have shown that when conditions (3.15) are satisfied. □
Lemma 3.4
When the conditions in (3.15) are satisfied, if and only if , where and are given in (3.9) .
Proof
Let
where
We then show that
In fact, let
By the conditions in (3.15), we obtain
and
Then when , we have
when , we have
and
thus
From the above analysis, we have when conditions (3.15) are satisfied, implying that the equation has two positive roots:
and if and only if . □
Theorem 3.5
When the conditions in (3.15) are satisfied, the following statements hold.
- (I)
If or (i.e., or ), then system (3.14) exhibits subcritical Hopf bifurcation and an unstable limit cycle appears around .
- (II)
If and
- (II.1)
(i.e., or ), then system (3.14) exhibits supercritical Hopf bifurcation and a stable limit cycle appears around ;- (II.2)
(i.e., or ), then system (3.14) exhibits subcritical Hopf bifurcation and an unstable limit cycle appears around ;- (II.3)
(i.e., or ), then system (3.14) may exhibits degenerate Hopf bifurcation and multiple limit cycles may appears around .Here, , and are given in (3.9) .
One stable (or unstable) limit cycle arising from supercritical (or subcritical) Hopf bifurcation around the equilibrium of system (3.14) is given in Fig. 3.2 . In Fig. 3.2(a), we fix , , and , and get from , and further obtain . Finally, we perturb a such that a decreases to 0.12, then becomes an unstable hyperbolic focus, leading to a stable limit cycle to appear around . In Fig. 3.2(b), we fix , , and , and get from , and further get . Finally, we perturb a such that a increases to 0.18, and so becomes a stable hyperbolic focus, yielding an unstable limit cycle to appear around .
Fig. 3.2.

(a) A stable limit cycle created by the supercritical Hopf bifurcation of the system (3.14) with n = 0.1, p = 1.2, m = −0.6, q = 2 and a = 0.12. (b) An unstable limit cycle created by the subcritical Hopf bifurcation of the system (3.14) with n = 0.1, p = 1.2, m = −0.6, q = 0.6 and a = 0.18.
Remark 3.1
In Fig. 3.2(a), the model has three equilibria, a disease-free equilibrium which is a stable hyperbolic node, two endemic equilibria (one is a hyperbolic saddle and the other is an unstable focus) and a stable limit cycle. If the initial population lies on the right side of the two stable manifolds of the saddle, then the disease will tend to a periodic coexistent oscillation. If the initial population lies on the left side of the two stable manifolds of the saddle, then the disease will die out.
Remark 3.2
In Fig. 3.2(b), the model has three equilibria, a disease-free equilibrium which is a stable hyperbolic node, two endemic equilibria (one is a hyperbolic saddle and the other is a stable focus) and an unstable limit cycle. If the initial population lies on the limit cycle, then the disease will persist in the form of a periodic coexistent oscillation. If the initial population lies inside the limit cycle, then the disease will tend to a stable steady state. If the initial population lies outside the limit cycle, the disease will die out for almost all positive initial populations.
3.4. Degenerate Hopf bifurcation of codimension two
From (II.3) of Theorem 3.5, we know that system (3.14) may exhibit degenerate Hopf bifurcation (i.e., Hopf bifurcation of codimension two) when , and conditions (3.15) are satisfied. Using the formal series method in [33] and MATLAB software, we obtain the second Lyapunov coefficient
| (3.20) |
where
Next we investigate the sign of and first give the following lemma.
Lemma 3.6
When conditions in (3.15) are satisfied, the inequality holds.
Proof
Let
When , we have by the step (II) of Lemma 3.3. Then and . Moreover, we can show that . In fact, the sign of is the same as that of
By a direct calculation, we have
It follows that when . Further, by a direct calculation, we have
so (i.e., ) when .
When , we have by the step (II) in the proof of Lemma 3.3. Then and . Moreover, we can show that . In fact
By a direct calculation, we have
It follows that and for . Thus, when .
Summarizing the above results, we have shown that (i.e., ) when conditions (3.15) are satisfied. □
When , , , , and by Lemma 3.6, we know that the sign of in (3.20) is the same as that of
| (3.21) |
Based on extensive numerical calculations, we conjecture that is an unstable multiple focus with multiplicity two, i.e., (or ) when , and conditions in (3.15) are satisfied. However, it is very difficult to pursue a pure algebraic proof. Next we combine geometric (graphic) and algebraic methods to show that is actually an unstable multiple focus with multiplicity at most two.
Actually, we have the following result.
Theorem 3.7
The equilibrium in system (3.14) (i.e., in system (2.3) ) is an unstable multiple focus with multiplicity at most two, system (2.3) can exhibit degenerate Hopf bifurcation of codimension two around , and the outer bifurcating limit cycles is unstable.
Proof
The Jacobian of the linearized system of (3.14) shows that Hopf bifurcation occurs at the critical point:
Setting yields the eigenvalues at the critical point as , where
In order to have , it needs
(3.22) which in turn yields from . It is obvious that we need the following condition:
(3.23) To simplify the analysis, we introduce two new parameters:
(3.24) Thus, the conditions are equivalent to . Then, and is reduced to . Note that the condition becomes
Therefore, the conditions in (3.15) are equivalent to the following conditions:
(3.25) Now, introducing the transformation,
and the time rescaling into (3.14), we obtain
(3.26) Next, applying the Maple program [31] we obtain the following focus values:
where
where is a lengthy polynomial, which is omitted here for brevity.
In the following, we prove that when , for the parameters satisfying the conditions in (3.25). Since and have the same sign of and , respectively, we consider the polynomials and .
First, suppose that the two polynomial equations have solutions for P and Q and we study if the solutions satisfy the conditions in (3.25). Note that is linear in Q, we solve Q from to obtain
(3.27) and then substitute it into to get
where
Note that the solutions of come from the quadratic polynomial equation . Solving this polynomial equation yields two solutions:
and then we have
To have real solutions for and , it requires . Summarizing the above results shows that if the two sets of solutions satisfy , they must satisfy the conditions given in (3.25) as well as . Define
It is clear that the conditions given in (3.25) must be in . We will show that the obtained solutions and do not belong to , then and do not satisfy conditions in (3.25), thus there are no feasible parameter values for , and the best possibility is but , which implies that the maximal number of limit cycles bifurcating from the Hopf critical point is two.
To prove the result by combining geometric (graphic) and algebraic methods, first we consider the set . Define the functions:
then plot the curves and on the m-n plane, and identify the regions on the boundary regime: , satisfying and . If these regions do not overlap, then no solutions exist; if these regions do overlap, we need to further check the last condition in (3.25), .
For the set , we show the curves and , in Fig. 3.3 (a) with the colors in red, blue, brown and green, respectively. Fig. 3.3(b) is a zoomed area near the m-axis. The region for is inside the red loop, and is outside the loop. Thus, we only need to consider the region outside the red loop. We use + or − to indicate or . Fig. 3.3(c) is a zoomed area near the corner of , showing that all three curves are tangent to the line at the corner. This can be rigorously proved using an algebraic argument. Figs. 3.3(a), (b) and (c) clearly show that there are no regions with and all three functions . Thus, the set does not have feasible solutions satisfying .
Next, consider the set . We have a similar result, as shown in Fig. 3.4 . Again, this set also does not have feasible solutions satisfying .
To this end, we have shown that under the restrictions on the parameters, as given in (3.25), it is not possible to have solutions such that and to have three limit cycles bifurcating from the equilibrium due to Hopf bifurcation. Therefore, the next best choice is to have and , and P can then be treated as a free parameter. The above proof implies that must be kept the same sign for the feasible parameter values. Otherwise, if it can change sign, then it must have solutions for , which contradicts the above result. To determine whether the sign of is positive or negative, we only need to choose a solution such that and then calculate . For example, taking , we obtain
giving and
implying that for any parameter values which satisfy the conditions given in (3.25). Thus, the outer bifurcating limit cycle is always unstable and the inner one is stable, both enclose an unstable focus . The proof is complete. □
Fig. 3.3.

Graphs of the regions on the m-n plane, divided by the curves Δ = Ck = 0, k = 1,2,3: (a) the boundary region 0 < n < 1, 1 + m + n > 0; (b) the zoomed area near the m-axis; and (c) the zoomed area near the corner (m,n)=(−2,1). (For interpretation of the colors in the figure(s), the reader is referred to the web version of this article.)
Fig. 3.4.

Graphs of the regions on the m-n plane, divided by the curves Δ = Ck = 0, k = 1,2,3: (a) the boundary region 0 < n < 1, 1 + m + n > 0; (b) the zoomed area near the m-axis; and (c) the zoomed area near the corner (m,n)=(−2,1).
Remark 3.3
If (i.e., ), then (i.e., ), thus (i.e., ) is an unstable multiple focus with multiplicity two when , and conditions in (3.15) are satisfied. Moreover, when (i.e., ), our system (2.2) is reduced to system (1.2) in [25], where the authors only discussed the Hopf bifurcation of codimension one, thus our results about Hopf bifurcation of codimension two can be seen as a complement of [25] by considering a more general system. On the other hand, when (i.e., ), our system (2.2) also becomes system (1.3) in [27], where the authors showed the existence of degenerate Hopf bifurcation by complex algebraic calculations, our Theorem 3.5, Theorem 3.7 give more explicit conditions and our proofs are easier to follow.
Next we give some numerical simulations in Fig. 3.5 to show the existence of two limit cycles based on Theorem 3.5, Theorem 3.7. Firstly, we fix , and , then get from , and get from , finally get , i.e., is an unstable multiple focus with multiplicity two for those fixed parameters. Next we first perturb q such that q increases to , then becomes a stable multiple focus with multiplicity one, an unstable limit cycle occurs around which is the outer limit cycle in Fig. 3.5. Secondly, we perturb a such that a decreases to , then becomes an unstable hyperbolic focus, another stable limit cycle occurs around , which is the inner limit cycle in Fig. 3.5.
Fig. 3.5.

Two limit cycles enclosing an unstable hyperbolic focus in system (3.14) with , p = 2, m = −1, and a = 1 − 0.003.
Remark 3.4
From Fig. 3.5, we can see that the existence of multiple periodic coexistent oscillations and coexistent steady states when the psychological effect α is smaller than the critical value but the infection rate k is greater than the first critical value , i.e., and . The disease will die out for almost all initial populations outside the outer unstable periodic orbit, and will tend to periodic outbreaks for almost all initial populations on or inside the outer unstable periodic orbit, and will persist in the form of positive steady states when the initial population lies on the positive equilibria or their stable manifolds.
4. Simulations of the influenza data in Mainland China
In section 1 we mentioned that nonmonotone and saturated incidence rates may apply to some infectious diseases such as influenza. In this section, we use model (2.1) to simulate the reported human influenza data from China. From the Chinese Center for Disease Control and Prevention (CCDC) [8], we obtain the annual data on human influenza cases from 2004 to 2017 which are shown in Table 1 . Most parameter values can be obtained from the literature or by estimation. We estimate k, α, β, δ and by using the unconstrained optimization functions , a part of the optimization toolbox in MATLAB, to fit through discretizing the ordinary differential system (2.1) as follows
The fitting is to minimize the objective function
where is numerical solution of model (2.1) and is the reported human influenza data from China.
Table 1.
The data on human influenza cases in China from 2004-2017 ([8]).
| Year | 2004 | 2005 | 2006 | 2007 | 2008 | 2009 | 2010 |
|---|---|---|---|---|---|---|---|
| Cases | 49496 | 45672 | 57557 | 36434 | 41692 | 198381 | 64502 |
|
| |||||||
| Year | 2011 | 2012 | 2013 | 2014 | 2015 | 2016 | 2017 |
|---|---|---|---|---|---|---|---|
| Cases | 66133 | 122140 | 129873 | 215533 | 195723 | 306682 | 456718 |
The parameter values are listed in Table 2 . From the data in 2004, we know that ; we make the data fitting to obtain that , then ; and assume that from Casagrandi et al. [7], data fitting gives , , and .
Table 2.
Parameters of model (2.1).
| Para | Value | Unit | Interpretation | Source |
|---|---|---|---|---|
| b | 1.64 × 107 | Year−1 | human recruitment rate | [23] |
| d | 0.006988 | Year−1 | human natural mortality rate | [23] |
| μ | Year−1 | human natural recovery rate | [7] | |
| δ | 0.33042 | Year−1 | human loss rate of immunity | fitting |
| k | 2.8668 × 10−8 | None | the infection rate | fitting |
| α | 4.9077 × 10−6 | None | measures the psychological or inhibitory effect | fitting |
| β | 78.12 | None | none | fitting |
Based on the parameter values given in Table 2, we use model (2.1) to simulate the data from 2004 to 2017 and predict the trend of human influenza infections in China. Fig. 4.1 represents the simulation of our model with reasonable parameter values which provides a good match to the data on infected human influenza cases in China from 2004 to 2017. In Fig. 4.2 our model predicts that the number of human influenza infection will increase in the next a couple of years.
Fig. 4.1.

Simulation of human influenza cases over time in China. The smooth curve represents the solution I(t) of model (2.1) and the dashed curve represents the reported human influenza cases from 2004 to 2017.
Fig. 4.2.

Prediction of human influenza cases in China.
5. Conclusion and discussion
In most classic SIRS epidemic models, the incidence rate is either monotonic or non-monotonic, and the infection force usually tends to zero as when the incidence rate is non-monotonic, which may be unreasonable for some specific infectious diseases. In this paper, we considered the SIRS epidemic model (1.1) with a generalized nonmonotone and saturated incidence function , which exhibits three different properties: (i) when , is monotonic, which always increases and then tends to a saturated level as I intends to infinite. (ii) When , is nonmonotonic, which increases when I is small and decreases when I is large, and finally tends to a saturated level as I tends to infinite (see Fig. 1.2), which can be used to describe the phenomenon that the infection force first increases to a maximum when a new infectious disease emerges, and then decreases due to psychological effect and eventually tends to a saturation level due to crowding effect. (iii) When , has both properties of (i) and (ii), i.e., is first nonmonotonic and then monotonic when β increases from negative to positive. In this paper, we performed qualitative and bifurcation analysis, and found that the model (1.1) with general incidence rate (1.8) has complicated dynamical behaviors and bifurcation phenomena. It has been shown that there exists a weak focus of multiplicity at most two and a cusp of codimension at most two for various parameter values, and the model undergoes saddle-node bifurcation, Bogdanov-Takens bifurcation of codimension two, Hopf bifurcation and degenerate Hopf bifurcation of codimension two as the parameter values vary. By considering a more general model, our results show that Bogdanov-Takens bifurcation of codimension higher than two cannot occur, which clarifies and corrects the corresponding results by Tang et al. [27]. Moreover, our results about degenerate Hopf bifurcation (i.e., Hopf bifurcation of codimension two) can also be seen as a complement of the results in Ruan and Wang [25]. We also used model (2.1) to simulate the reported human influenza data from 2004 to 2017 reported by the Chinese Center for Disease Control and Prevention.
In recent years, people realize the importance of the inhibition effect from the behavioral change of susceptible individuals when their number increases or from the crowding effect of the infective individuals, and the psychological effect or inhibition effect can cause people to adopt some aggressive measures and policies, such as border screening, mask wearing, quarantine, isolation and so on, which have been proved to be very effective in reducing the contact rate or the infection force. However, it is difficult to measure the psychological effect. So can we give a quantitative description about the psychological effect with respect to variation of the parameters involved in the infectious diseases? In this paper, we presented a concrete critical value to measure the psychological effect. More specifically, we have shown that there exists a critical value for the psychological or inhibitory effect and two critical values for the infection rate such that: (i) when , or and , the disease will die out for all positive initial populations; (ii) when and , the disease will die out for almost all positive initial populations; (iii) when and , the disease will persist in the form of a positive coexistent steady state for some positive initial populations; and (iv) when and , the disease will persist in the form of multiple positive periodic coexistent oscillations and coexistent steady states for some positive initial populations.
Footnotes
Research was partially supported by NSFC (No. 11471133, No. 11871235, No. 11771168), NSF (DMS-1853622) and NSERC (No. R2686A02).
References
- 1.Alexander M.E., Moghadas S.M. Periodicity in an epidemic model with a generalized nonlinear incidence. Math. Biosci. 2004;189:75–96. doi: 10.1016/j.mbs.2004.01.003. [DOI] [PubMed] [Google Scholar]
- 2.Alexander M.E., Moghadas S.M. Bifurcation analysis of an SIRS epidemic model with generalized incidence. SIAM J. Appl. Math. 2005;65:1794–1816. [Google Scholar]
- 3.Bogdanov R. Bifurcations of a limit cycle for a family of vector fields on the plane. Sel. Math. Sov. 1981;1:373–388. [Google Scholar]
- 4.Bogdanov R. Versal deformations of a singular point on the plane in the case of zero eigen-values. Sel. Math. Sov. 1981;1:389–421. [Google Scholar]
- 5.Capasso V., Crosso E., Serio G. I modelli matematici nella indagine epidemiologica. I Applicazione all'epidemia di colera verificatasi in Bari nel 1973. Ann. Sclavo. 1977;19:193–208. [PubMed] [Google Scholar]
- 6.Capasso V., Serio G. A generalization of the Kermack-McKendrick deterministic epidemic model. Math. Biosci. 1978;42:43–61. [Google Scholar]
- 7.Casagrandi R., Bolzoni L., Levin S., Andreasen V. The SIRC model and influenza A. Math. Biosci. 2006;200:152–169. doi: 10.1016/j.mbs.2005.12.029. [DOI] [PubMed] [Google Scholar]
- 8.http://www.nhfpc.gov.cn/jkj/s3578/new_list.shtml Chinese Center for Disease Control and Prevention, Reports on Infectious Diseases (2004-2017)
- 9.Derrick W.R., van den Driessche P. Homoclinic orbits in a disease transmission model with nonlinear incidence and nonconstant population. Discrete Contin. Dyn. Syst. Ser. B. 2003;3:299–309. [Google Scholar]
- 10.Derrick W.R., van den Driessche P. A disease transmission in a nonconstant population. J. Math. Biol. 1993;31:495–512. doi: 10.1007/BF00173889. [DOI] [PubMed] [Google Scholar]
- 11.Y. Dai, Y. Zhao, B. Sang, Global dynamics for a predator-prey system of Leslie type with generalized Holling type III functional response, submitted for publication.
- 12.Hethcote H.W. The mathematics of infectious disease. SIAM Rev. 2000;42:599–653. [Google Scholar]
- 13.Hethcote H.W., van den Driessche P. Some epidemiological models with nonlinear incidence. J. Math. Biol. 1991;29:271–287. doi: 10.1007/BF00160539. [DOI] [PubMed] [Google Scholar]
- 14.Hu Z., Bi P., Ma W., Ruan S. Bifurcations of an SIRS epidemic model with nonlinear incidence rate. Discrete Contin. Dyn. Syst. Ser. B. 2011;15:93–112. [Google Scholar]
- 15.Huang J., Gong Y., Ruan S. Bifurcation analysis in a predator-prey model with constant-yield predator harvesting. Discrete Contin. Dyn. Syst. Ser. B. 2013;18:2101–2121. [Google Scholar]
- 16.Kermack W.O., McKendrick A.G. A contribution to the mathematical theory of epidemics. Proc. R. Soc. Lond. 1927;115:700–721. [Google Scholar]
- 17.Li J., Zhao Y., Zhu H. Bifurcation of an SIS model with nonlinear contact rate. J. Math. Anal. Appl. 2015;432:1119–1138. [Google Scholar]
- 18.Liu S., Pang L., Ruan S., Zhang X. Global dynamics of avian influenza epidemic models with psychological effects. Comput. Math. Methods Med. 2015;2015 doi: 10.1155/2015/913726. 12 pages. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 19.Liu W.M., Hetchote H.W., Levin S.A. Dynamical behavior of epidemiological models with nonlinear incidence rates. J. Math. Biol. 1987;25:359–380. doi: 10.1007/BF00277162. [DOI] [PubMed] [Google Scholar]
- 20.Liu W., Levin S., Iwasa Y. Influence of nonlinear incidence rates upon the behavior of SIRS epidemiological models. J. Math. Biol. 1986;23:187–204. doi: 10.1007/BF00276956. [DOI] [PubMed] [Google Scholar]
- 21.Lizana M., Rivero J. Multiparametric bifurcations for a model in epidemiology. J. Math. Biol. 1996;35:21–36. doi: 10.1007/s002850050040. [DOI] [PubMed] [Google Scholar]
- 22.Moghadas S.M., Alexander M.E. Bifurcations of an epidemic model with non-linear incidence and infection-dependent removal rate. Math. Med. Biol. 2006;23:231–254. doi: 10.1093/imammb/dql011. [DOI] [PubMed] [Google Scholar]
- 23.http://data.stats.gov.cn/easyquery.htm?cn=C01 National Bureau of Statistics of China (2004-2017)
- 24.Perko L. 3rd ed. Springer; New York: 2001. Differential Equations and Dynamical Systems. [Google Scholar]
- 25.Ruan S., Wang W. Dynamical behavior of an epidemical model with a nonlinear incidence rate. J. Differential Equations. 2003;188:135–163. [Google Scholar]
- 26.Takens F. Forced oscillations and bifurcation. Applications of Global Analysis IComm. Math. Inst. Rijksuniversitat Utrecht. 1974;3:1–59. [Google Scholar]
- 27.Tang Y., Huang D., Ruan S., Zhang W. Coexistence of limit cycles and homoclinic loops in a SIRS model with a nonlinear incidence rate. SIAM J. Appl. Math. 2008;69:621–639. [Google Scholar]
- 28.Wang W. Epidemic models with nonlinear infection forces. Math. Biosci. Eng. 2006;3:267–279. doi: 10.3934/mbe.2006.3.267. [DOI] [PubMed] [Google Scholar]
- 29.Xiao D., Ruan S. Global analysis of an epidemic model with a nonlinear incidence rate. Math. Biosci. 2007;208:419–429. doi: 10.1016/j.mbs.2006.09.025. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 30.Xiao D., Zhou Y. Qualitative analysis of an epidemic model. Can. Appl. Math. Q. 2006;14:469–492. [Google Scholar]
- 31.Yu P. Computation of normal forms via a perturbation technique. J. Sound Vib. 1998;211:19–38. [Google Scholar]
- 32.Zhou Y., Xiao D., Li Y. Bifurcations of an epidemic model with non-monotonic incidence rate of saturated mass action. Chaos Solitons Fractals. 2007;32:1903–1915. doi: 10.1016/j.chaos.2006.01.002. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 33.Zhang Z., Ding T., Huang W., Dong Z. vol. 101. Amer. Math. Soc.; Providence, RI: 1992. Qualitative Theory of Differential Equations. (Transl. Math. Monogr.). [Google Scholar]