

Abstract
Polynomials which arise via elimination can be difficult to compute explicitly. By using a pseudo-witness set, we develop an algorithm to explicitly compute the restriction of a polynomial to a given line. The resulting polynomial can then be used to evaluate the original polynomial and directional derivatives along the line at any point on the given line. Several examples are used to demonstrate this new algorithm including examples of computing the critical points of the discriminant locus for parameterized polynomial systems.
Keywords: Numerical algebraic geometry, Pseudo-witness set, Implicit polynomial, Directional derivatives, Critical points
Introduction
Parameterized polynomial systems arise in various applications in science and engineering, such as in computer vision [15, 17, 22], kinematics [14, 23], and chemistry [1, 19]. Often in these applications, real solutions are desired. The complement of the discriminant locus associated with the parameterized polynomial system consists of cells where the number of real solutions is constant. Elimination methods (e.g., see [8, Chap. 3]) theoretically provide an approach to explicitly compute a defining equation for the discriminant locus. If the discriminant locus is a curve or surface, there are several numerical methods that can be used to plot it, e.g., [6, 7, 18]. When the explicit expression is difficult to compute, this paper develops a numerical algebraic geometric approach based on pseudo-witness sets [13] for both evaluating implicitly defined polynomials and directional derivatives. In particular, the approach yields an explicit univariate polynomial equal to the defining equation restricted to a line which can then be evaluated or differentiated as needed. When the parameterized system and line have rational coefficients, the resulting univariate polynomial also has rational coefficients which can be computed exactly from the numerical data [2].
One application of this new approach is to compute the critical points of the discriminant polynomial which are outside of the discriminant locus without explicitly computing the discriminant. This set of critical points contains at least one point in each compact cell in the complement of the discriminant locus [10] which can be useful for determining the possible number of real solutions as well as the real monodromy structure [11].
The remainder of the paper is as follows. Section 2 describes the approach based on using pseudo-witness sets. Section 3 presents an algorithm for performing the computations with some illustrative examples. Section 4 provides two examples of computing critical points.
Implicit Representation of a Polynomial
In numerical algebraic geometry, e.g., see [4, 21], a witness point set for a hypersurface  consists of the intersection points of
consists of the intersection points of  with a line
with a line  . Suppose that f(x) is a given polynomial and
. Suppose that f(x) is a given polynomial and  is the hypersurface defined by the vanishing of f. Then, the witness point set for
is the hypersurface defined by the vanishing of f. Then, the witness point set for  corresponds with the roots of the univariate polynomial obtained by restricting f to the line
corresponds with the roots of the univariate polynomial obtained by restricting f to the line  . Since every univariate polynomial is defined up to scale by its roots, one can recover
. Since every univariate polynomial is defined up to scale by its roots, one can recover  by computing its roots along with knowing
by computing its roots along with knowing  for some value T which is not a root of
for some value T which is not a root of  . The following is an illustration of this basic setup.
. The following is an illustration of this basic setup.
Example 1
Consider the polynomial  with corresponding hypersurface
with corresponding hypersurface  and the line
and the line  defined parametrically by:
defined parametrically by:
 |
Therefore, one can explicitly compute
 |
1 |
For  and
and  , one has
, one has
 |
2 |
Hence,  for some constant s which can be computed from, say, requiring
for some constant s which can be computed from, say, requiring  where
where  , i.e.,
, i.e.,  . Therefore, one has recovered
. Therefore, one has recovered  in (1) from
in (1) from  with
with  as illustrated in Fig. 1(a).
as illustrated in Fig. 1(a).
Fig. 1.

A visual representation of the pseudo-witness set for  defined by
defined by  with a linear slice,
with a linear slice,  , that is (a) generic, (b) special with one root of multiplicity one, and (c) tangent. The black dots represent the roots
, that is (a) generic, (b) special with one root of multiplicity one, and (c) tangent. The black dots represent the roots  and the black stars represent T selected for scale.
and the black stars represent T selected for scale.
The remainder of this section extends this idea using pseudo-witness sets when f is a polynomial over  that is not known explicitly, but the corresponding hypersurface
that is not known explicitly, but the corresponding hypersurface  arises as the closure of a projection of an algebraic set. For simplicity of presentation, assume that
arises as the closure of a projection of an algebraic set. For simplicity of presentation, assume that  is a polynomial system and that V is a pure d-dimensional subset of
is a polynomial system and that V is a pure d-dimensional subset of  . Let
. Let  such that
such that  . Note that one has
. Note that one has  . A pseudo-witness set [13] for
. A pseudo-witness set [13] for  , say
, say  , is a numerical algebraic geometric data structure that permits computations on
, is a numerical algebraic geometric data structure that permits computations on  without knowing the defining polynomial f for
without knowing the defining polynomial f for  . The last two items are a linear space
. The last two items are a linear space  and a finite set
and a finite set  . In particular,
. In particular,  where
where  is a codimension
is a codimension  general linear space so that
general linear space so that  has codimension d. Hence,
has codimension d. Hence,  is a witness point set for
is a witness point set for  with respect to
with respect to  . With this setup, the local multiplicity of each point in
. With this setup, the local multiplicity of each point in  can be easily computed via [5, Prop. 6] (see also [9, pg. 158]). Thus, parameterizing
can be easily computed via [5, Prop. 6] (see also [9, pg. 158]). Thus, parameterizing  by t and denoting
by t and denoting  as the corresponding points in
as the corresponding points in  with multiplicity
with multiplicity  , respectively, yields
, respectively, yields
 |
3 |
as shown in the following.
Theorem 1
The univariate polynomial describing f along the line  is correctly described by (3).
is correctly described by (3).
Proof
The assumption on T is that  , i.e.,
, i.e.,  . Hence,
. Hence,  is a nonzero polynomial which has finitely many roots, namely
is a nonzero polynomial which has finitely many roots, namely  with multiplicity
with multiplicity  , respectively. Thus,
, respectively. Thus,  with
with  . Since the roots define the univariate polynomial up to scale, the leading coefficient is used to achieve the desired value at T and thus everywhere along
. Since the roots define the univariate polynomial up to scale, the leading coefficient is used to achieve the desired value at T and thus everywhere along  .
.
The following illustrates a pseudo-witness set and Theorem 1.
Example 2
Consider the hypersurface  from Example 1 under the assumption that we are given
from Example 1 under the assumption that we are given  where
where  and
and  with
with
 |
Since  and
and  , we have
, we have  with
with
 |
where  and
and  are as in Example 1 with
are as in Example 1 with  . Hence,
. Hence,  as in (2). Therefore, with
as in (2). Therefore, with  and
and  , (3) simplifies to
, (3) simplifies to  in (1).
in (1).
The only assumption on the line  is that
is that  so that one can find T such that
so that one can find T such that  . Of course, one can check if
. Of course, one can check if  by a pseudo-witness set membership test [12] in which case one would simply have
by a pseudo-witness set membership test [12] in which case one would simply have  . Thus,
. Thus,  is not necessarily assumed to intersect
is not necessarily assumed to intersect  transversely, so the number of roots and multiplicities can vary for different choices of
transversely, so the number of roots and multiplicities can vary for different choices of  . Nonetheless, Theorem 1 applies as is illustrated in the following two examples.
. Nonetheless, Theorem 1 applies as is illustrated in the following two examples.
Example 3
Reconsider Example 2 with  being the vertical line parametrized by
being the vertical line parametrized by
 |
as shown in Fig. 1(b). One has  and
and  with
with  and
and  . For scale, consider
. For scale, consider  with
with  . Thus, (3) yields
. Thus, (3) yields
 |
Example 4
Reconsider Example 2 with  being the horizontal line parametrized by
being the horizontal line parametrized by
 |
as shown in Fig. 1(c). One has  and
and  with
with  and
and  . For scale, consider
. For scale, consider  with
with  . Thus, (3) yields
. Thus, (3) yields
 |
Clearly, once the univariate polynomial  in (3) is computed explicitly, one can easily determine the value of f at any point along
in (3) is computed explicitly, one can easily determine the value of f at any point along  via evaluation. Moreover, if
via evaluation. Moreover, if  is parameterized by
is parameterized by  , then
, then  is equal to the
is equal to the  directional derivative of f with respect to v at
directional derivative of f with respect to v at  , denoted
, denoted  .
.
Example 5
For  in Example 3 and Example 4, one has
in Example 3 and Example 4, one has  and
and  , respectively. Hence, the corresponding directional derivatives are simply partial derivatives of
, respectively. Hence, the corresponding directional derivatives are simply partial derivatives of  with respect to y and x, respectively. From Example 3, one obtains
with respect to y and x, respectively. From Example 3, one obtains  while Example 4 yields
while Example 4 yields  and
and  .
.
Algorithm
Theorem 1 immediately justifies Algorithm 1 for explicitly computing a polynomial restricted to a line. The following two examples exemplify this algorithm applied to the discriminant locus.
Example 6
Consider the discriminant locus  for
for  . Hence,
. Hence,  where
where  and
and  with
with
 |
For the line  parameterized by
parameterized by
 |
with  , one has
, one has  . The other input for Algorithm 1 is, say,
. The other input for Algorithm 1 is, say,  with
with  to set the scale. This setup is illustrated in Fig. 2(a).
to set the scale. This setup is illustrated in Fig. 2(a).
Fig. 2.
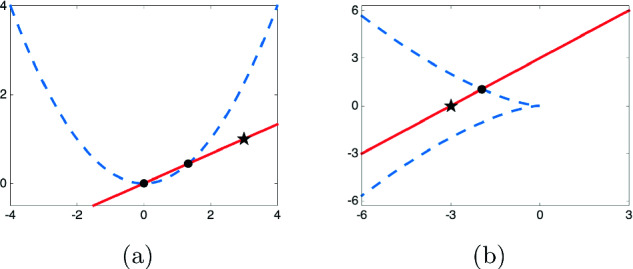
Pseudo-witness set for the discriminant locus of (a) the quadratic  and (b) the cubic
and (b) the cubic  .
.
The pseudo-witness set yields  and
and  with
with  . The corresponding scale factor is
. The corresponding scale factor is
 |
so that Algorithm 1 returns  .
.
Of course, one can easily compute that the discriminant of g satisfying  is
is  with
with  .
.
Example 7
Consider the discriminant locus  for
for  . Hence,
. Hence,  where
where  and
and  with
with
 |
For the line  parameterized by
parameterized by
 |
with  , one has, rounded to 4 decimal places with
, one has, rounded to 4 decimal places with  ,
,
The other input for Algorithm 1 is, say,  with
with  for scale. This setup is illustrated in Fig. 2(b).
for scale. This setup is illustrated in Fig. 2(b).
The pseudo-witness set yields  ,
,  , and
, and  with
with  . The corresponding scale factor is
. The corresponding scale factor is  so that
so that  .
.
As in Example 6, one can easily compute that the discriminant of g satisfying  is
is  with
with  as above.
as above.
Computing Critical Points
When the line  is fixed, Algorithm 1 computes the restriction of a polynomial f to
is fixed, Algorithm 1 computes the restriction of a polynomial f to  . The following presents two examples of combining this idea with homotopy continuation to compute critical points of f, namely
. The following presents two examples of combining this idea with homotopy continuation to compute critical points of f, namely  . The set of real solutions to
. The set of real solutions to  with
with  contains at least one point in each compact cell of
contains at least one point in each compact cell of  [10]. The website dx.doi.org/10.7274/r0-0mc0-gt33 contains the necessary files to perform these computations using Bertini [3].
[10]. The website dx.doi.org/10.7274/r0-0mc0-gt33 contains the necessary files to perform these computations using Bertini [3].
Lemniscate
This first example demonstrates the approach given  which defines a lemniscate, but utilizes a pseudo-witness set for the computation. The aim is to compute all real solutions of
which defines a lemniscate, but utilizes a pseudo-witness set for the computation. The aim is to compute all real solutions of  and
and  . For genericity, replace
. For genericity, replace  with the equivalent condition that the directional derivatives of f in both the
with the equivalent condition that the directional derivatives of f in both the  and
and  directions, namely
directions, namely  and
and  , vanish for general
, vanish for general  and
and  . We used
. We used  , and
, and  in our computation.
in our computation.
Since one is setting directional derivatives equal to zero, the scale factor is irrelevant and can be simply set to 1. We first compute a witness set for each of the cubic curves defined by  and
and  where each of them are expressed in terms of univariate roots following Sect. 2. Then, we simply intersect these two cubic curves using a diagonal homotopy [20] that tracks
where each of them are expressed in terms of univariate roots following Sect. 2. Then, we simply intersect these two cubic curves using a diagonal homotopy [20] that tracks  paths. There are 3 finite endpoints corresponding with the 3 solutions of
paths. There are 3 finite endpoints corresponding with the 3 solutions of  , all of which are real and shown in Fig. 3(a). Two of these have
, all of which are real and shown in Fig. 3(a). Two of these have  with one in each of the two compact cells of
with one in each of the two compact cells of  .
.
Fig. 3.
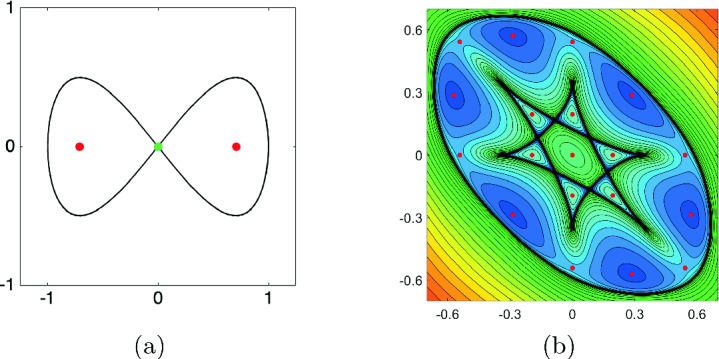
(a) The lemniscate with 2 critical points satisfying  (red) and the other satisfying
(red) and the other satisfying  (green), and (b) the discriminant locus (black) for the 3-oscillator Kuramoto model with contour plot and 19 real critical points (red) in the complement. (Color figure online)
(green), and (b) the discriminant locus (black) for the 3-oscillator Kuramoto model with contour plot and 19 real critical points (red) in the complement. (Color figure online)
Kuramoto Model
The Kuramoto model [16] is a mathematical model of an oscillating system to describe synchronization. After a standard conversion to polynomials, the discriminant locus for the steady states of the 3-oscillator Kuramoto model is modeled by  where
where  and
and  with
with
 |
4 |
Letting f be a defining polynomial for  , the aim is to compute the real solutions of
, the aim is to compute the real solutions of  with
with  using a pseudo-witness set for
using a pseudo-witness set for  . As in Sect. 4.1, we replace
. As in Sect. 4.1, we replace  with the equivalent condition that two general directional derivatives vanish. In this case, the vanishing of a general directional derivative of f yields a degree 11 curve, so a diagonal homotopy [20] to intersect the vanishing of two directional derivatives tracks
with the equivalent condition that two general directional derivatives vanish. In this case, the vanishing of a general directional derivative of f yields a degree 11 curve, so a diagonal homotopy [20] to intersect the vanishing of two directional derivatives tracks  paths. This yields 103 finite solutions consisting of 37 that satisfy
paths. This yields 103 finite solutions consisting of 37 that satisfy  which can be verified using a membership test via a pseudo-witness set for
which can be verified using a membership test via a pseudo-witness set for  [12]. Sorting through these 37 yields 19 real critical points with
[12]. Sorting through these 37 yields 19 real critical points with  . Figure 3(b) plots the real part of
. Figure 3(b) plots the real part of  along with these 19 real critical points on a contour plot of f showing that at least one is contained in each compact cell of
along with these 19 real critical points on a contour plot of f showing that at least one is contained in each compact cell of  .
.
Acknowledgments
All authors acknowledge support from NSF CCF-1812746. Additional support for was provided by ONR N00014-16-1-2722 (Hauenstein) and Schmitt Leadership Fellowship in Science and Engineering (Regan).
Contributor Information
Anna Maria Bigatti, Email: bigatti@dima.unige.it.
Jacques Carette, Email: carette@mcmaster.ca.
James H. Davenport, Email: j.h.davenport@bath.ac.uk
Michael Joswig, Email: joswig@math.tu-berlin.de.
Timo de Wolff, Email: t.de-wolff@tu-braunschweig.de.
Jonathan D. Hauenstein, Email: hauenstein@nd.edu, http://www.nd.edu/~jhauenst
Margaret H. Regan, Email: mregan9@nd.edu, http://www.nd.edu/~mregan9
References
- 1.Al-Khateeb, A.N.: One-dimensional slow invariant manifolds for spatially homogeneous reactive systems. J. Chem. Phys. 131 (2009) [DOI] [PubMed]
- 2.Bates DJ, Hauenstein JD, McCoy TM, Peterson C, Sommese AJ. Recovering exact results from inexact numerical data in algebraic geometry. Exp. Math. 2013;22(1):38–50. doi: 10.1080/10586458.2013.737640. [DOI] [Google Scholar]
- 3.Bates, D.J., Hauenstein, J.D., Sommese, A.J., Wampler, C.W.: Bertini: software for numerical algebraic geometry. bertini.nd.edu
- 4.Bates, D.J., Hauenstein, J.D., Sommese, A.J., Wampler, C.W.: Numerically solving polynomial systems with Bertini. SIAM (2013)
- 5.Bernardi A, Daleo NS, Hauenstein JD, Mourrain B. Tensor decomposition and homotopy continuation. Differ. Geom. Appl. 2017;55:78–105. doi: 10.1016/j.difgeo.2017.07.009. [DOI] [Google Scholar]
- 6.Besana GM, Di Rocco S, Hauenstein JD, Sommese AJ, Wampler CW. Cell decomposition of almost smooth real algebraic surfaces. Numer. Algor. 2013;63:645–678. doi: 10.1007/s11075-012-9646-y. [DOI] [Google Scholar]
- 7.Chen C, Wu W. A numerical method for computing border curves of bi-parametric real polynomial systems and applications. In: Gerdt VP, Koepf W, Seiler WM, Vorozhtsov EV, editors. Computer Algebra in Scientific Computing; Cham: Springer; 2016. pp. 156–171. [Google Scholar]
- 8.Cox DA, Little J, O’Shea D. Ideals, Varieties, and Algorithms. 4. Cham: Springer; 2015. [Google Scholar]
- 9.Fischer G. Complex Analytic Geometry. Heidelberg: Springer; 1976. [Google Scholar]
- 10.Harris, K., Hauenstein, J.D., Szanto, A.: Smooth points on semi-algebraic sets. arXiv:2002.04707 (2020)
- 11.Hauenstein JD, Regan MH. Real monodromy action. Appl. Math. Comput. 2020;373:124983. [Google Scholar]
- 12.Hauenstein JD, Sommese AJ. Membership tests for images of algebraic sets by linear projections. Appl. Math. Comput. 2013;219(12):6809–6818. [Google Scholar]
- 13.Hauenstein JD, Sommese AJ. Witness sets of projections. Appl. Math. Comput. 2010;217(7):3349–3354. [Google Scholar]
- 14.Hauenstein JD, Wampler CW, Pfurner M. Synthesis of three-revolute spatial chains for body guidance. Mech. Mach. Theory. 2017;110:61–72. doi: 10.1016/j.mechmachtheory.2016.12.008. [DOI] [Google Scholar]
- 15.Irschara, A., Zach, C., Frahm, J.M., Bischof, H.: From structure-from-motion point clouds to fast location recognition. In: CVPR, pp. 2599–2606. IEEE (2009)
- 16.Kuramoto Y. Self-entrainment of a population of coupled non-linear oscillators. In: Araki H, editor. International Symposium on Mathematical Problems in Theoretical Physics. Heidelberg: Springer; 1975. pp. 420–422. [Google Scholar]
- 17.Leibe, B., Cornelis, N., Cornelis, K., Van Gool, L.: Dynamic 3D scene analysis from a moving vehicle. In: CVPR, pp. 1–8. IEEE (2007)
- 18.Lu Y, Bates DJ, Sommese AJ, Wampler CW. Finding all real points of a complex curve. Contemp. Math. 2007;448:183–205. doi: 10.1090/conm/448/08665. [DOI] [Google Scholar]
- 19.Morgan AP. Solving Polynomial Systems Using Continuation for Engineering and Scientific Problems. Englewood Cliffs: Prentice-Hall; 1987. [Google Scholar]
- 20.Sommese AJ, Verschelde J, Wampler CW. Solving polynomial systems equation by equation. In: Dickenstein A, Schreyer FO, Sommese AJ, editors. Algorithms in Algebraic Geometry. New York: Springer; 2008. pp. 133–152. [Google Scholar]
- 21.Sommese AJ, Wampler CW. The Numerical Solution of Systems of Polynomials Arising in Engineering and Science. Hackensack: World Scientific; 2005. [Google Scholar]
- 22.Snavely, N., Seitz, S.M., Szeliski, R.: Photo tourism: exploring photo collections in 3D. In: ACM SIGGRAPH, pp. 835–846 (2006)
- 23.Wampler CW, Sommese AJ. Numerical algebraic geometry and algebraic kinematics. Acta Numerica. 2011;20:469–567. doi: 10.1017/S0962492911000067. [DOI] [Google Scholar]