

Abstract
Detailed quantification of the spatial and temporal variability of ambient fine particulate matter (PM2.5) has, to date, been limited due to the cost and logistics involved with traditional monitoring approaches. New miniaturized particle sensors are a potential strategy to gather more time- and spatially-resolved data, to address data gaps in regions with limited monitoring and to address important air quality research priorities in a more cost-effective manner. This work presents field evaluations and lab testing of three models of low-cost (< $200) PM sensors (SHINYEI: models PPD42NS, PPD20V, PPD60PV) in three locations: urban background (average PM2.5: 8 μg m−3) and roadside in Atlanta, Georgia, USA (average PM2.5: 21 μg m−3), and a location with higher ambient concentrations in Hyderabad, India (average PM2.5: 72 μg m−3). Sensor measurements were compared against reference monitors in the lab using one-minute averages and in field locations using one-hour averages. At the Atlanta sites the sensors were weakly correlated with a tapered element oscillating microbalance (TEOM) at best (R2 ≤ 0.30). In Hyderabad, the PPD20V sensors had the highest correlation with the environmental beta attenuation monitor (E-BAM) (R2 > 0.80), however the same sensors had poor agreement if the comparison was restricted to lower concentrations (R2 = ~0, < 40 μg m−3). The results of this work indicate the potential usefulness of these sensors, including the PPD20V, for higher concentration applications (< ~250 μg m−3). These field- testing results provide important insights into the varying performance of low-cost PM sensors under highly contrasting atmospheric conditions. The inconsistent performance results underscore the need for rigorous evaluation of optical particle sensors in the laboratory and in diverse field environments.
Keywords: Field calibration, Fine particulate matter, SHINYEI, Low-cost sensor
INTRODUCTION
Air pollution is one of the largest public health issues globally and a number of key research priorities including investigating effective interventions, quantifying air pollution exposures, and examining causal links between pollution and subclinical impairment need to be addressed to improve health globally especially in low and middle-income countries (Landrigan et al., 2018; Zivin and Neidell, 2018). Although some cities in the US have PM values above the National Ambient Air Quality Standard (NAAQS) (EPA, 2013) annual PM2.5 concentration value of 12 μg m-3, PM concentrations in many low and middle-income countries, including India, are orders of magnitude higher (Health Effects Institute, 2010; Tiwari et al., 2015).
A variety of methods are used for PM2.5 sampling. The US Federal Reference Method (FRM), is filter-based and non-continuous. This method requires skilled personnel and highly specialized facilities and equipment to produce quantitative PM concentrations (EPA, 2015). Continuous measurement instruments, including US Federal Equivalent methods (FEMs) and other research-grade instruments, often cost ten thousand to tens of thousands of dollars and usually must be operated in climate-controlled spaces, with substantial oversight and maintenance (Chow, 1995). Many PM2.5 constituents vary within urban areas (Pinto et al., 2004), but the high costs associated with conventional measurements limit the number of air quality monitoring sites globally, leading to generally sparse spatially-defined air quality information that may not represent actual exposures (Stevens et al., 2014). Citizens and policymakers desire more data to make decisions for individual and societal health and well-being. From a research perspective, many important research questions remain to be answered about PM2.5 exposure and health outcomes, the effectiveness of interventions on reducing PM2.5 and health, and other issues. With conventional monitoring equipment obtaining a sample size large enough to be statistically significantly difficult can be cost prohibitive, and it can be hard to evaluate an intervention on a case-by-case basis.
Some of the issues of cost and convenience posed by conventional measurement equipment may be addressed by new sensor technologies. Sensors are available that are lower in cost than their conventional counterparts. The purchase price of sensors are < 1–10% of the cost of a reference analyzer, however, the full cost of implementation inclusive of other costs such as data management and analytics, sensor replacement timeframe, and sensor calibration are less well quantified. A further advantage is that these new sensors are small in size, lightweight, and have minimal power consumption. Such sensors have the potential to be a feasible option for researchers, governments, citizens and community groups to monitor air quality in many more locations than previously feasible. These sensors have already been used to identify and monitor hot spots, in arrays to generate data with higher spatial and temporal resolution (Mead et al., 2013; Bart et al., 2014; Gao et al., 2015; Zikova et al., 2017), to attribute sources of pollutants (Heimann et al., 2015), to map indoor pollution concentrations (Li et al., 2018), to collect personal exposure data (Steinle et al., 2015; Lewis and Edwards, 2016; Zhang et al., 2017), to collect mobile monitoring data (Bossche et al., 2015), and a variety of other applications (Kumar et al., 2016; Rai et al., 2017), including for citizen science (Duvall et al., 2016; Jiang et al., 2016; PurpleAir, 2017; Rai et al., 2017). However, concerns remain about the accuracy and performance of these newer sensors due to their more simplistic measurement techniques, limited field performance data, and often a dearth of information from the manufacturer. These concerns can be mitigated by thoroughly evaluating the sensors for specific applications and conditions (Snyder et al., 2013; Kumar et al., 2015; Lewis and Edwards, 2016).
The goal of this work is to evaluate several lower-cost alternatives for generating continuous pollutant measurements in markedly different environments. This paper focuses on the performance of 3 optical particle sensors produced by one manufacturer (SHINYEI Technology Co., LTD). The response of optically-based PM sensors is largely a function of the actual properties of the ambient aerosol at the specific measurement location, including the size distribution and chemical composition. Particle properties are variable and are composed of both internal and external mixtures of chemical components that vary as a function of size. Laboratory studies with light scattering particle sensors have found the responses vary widely depending on particle size and composition (Austin et al., 2015; Wang et al., 2015; Manikonda et al., 2016). While laboratory evaluation is useful, there are limitations in the ability to generate aerosol mixtures that match the variability of chemical and physical composition of particles in urban environments. This work focuses mainly on field evaluations of sensors against reference monitors under both low (Atlanta, USA) and high (Hyderabad, India) ambient PM concentration settings. Additionally, we briefly discuss evaluations conducted in our laboratory as well as recent detailed laboratory analyses of similar sensors (Austin et al., 2015; Wang et al., 2015; Kelly et al., 2017; Kuula et al., 2017). This work is especially important since once sensors have been well characterized and their optimal operating environment has been identified they can be used to address any number of aerosol and air quality research priorities.
METHODS
Overview
A variety of PM sensors were evaluated in a laboratory setting and in three field projects. The three field sites included an urban background rooftop in Atlanta, Georgia, USA, a roadside in Atlanta, and a rooftop in Hyderabad, India.
Sensor Configuration
Three particle sensors from SHINYEI Technology Co. (Kobe, Japan) the PPD42NS, the PPD20V, and the PPD60PV were tested during these field and lab experiments (Table 1). The SHINYEI sensors were selected because of their price and the prevalence of use of the PPD42NS and PPD60PV sensors in citizen science applications and custom-built research prototypes. The sensors measure particles using a light scattering approach – an infrared LED is used as the light source, and a photodiode array with lens measures the scattered light. This operating principle is shown in Fig. 1. The three sensors have similar internal components. The SHINYEI PM sensors provide an electrical signal (either analog or digital) based on light scattering, producing an output in units of voltage (analog), or the ratio of time where a particle pulse was experienced (digital). The sensors have a 0.25-watt resistor that is designed to heat the air, drawing a sample passively into the detection volume.
Table 1.
Low-cost sensors discussed in this paper.
| Pollutant | Sensor | Cost ($) | Dimensions (mm) | Technology | Specifications |
|---|---|---|---|---|---|
| PM | Shinyei PPD42NS | 10 | 59 (W) × 45 (H) × 22 (D) | volume light scattering (digital output) | > 1 μm |
| PM | Shinyei PPD20V | 150 | 88 (W) × 60 (H) × 20 (D) | volume light scatterin (analog output) | > 1 μm |
| PM | Shinyei PPD60PV | 150 | 88 (W) × 60 (H) × 20 (D) | volume light scattering (analog output) | > 0.5 μm |
| Temperature and RH | Sensirion SHT 15 | 40 | 5 × 7.5 × 2.6 (D) | band-gap displacement capacitance | –40 to 100 ± < 0.5°C 0 to 100% ± 2% |
Fig. 1.
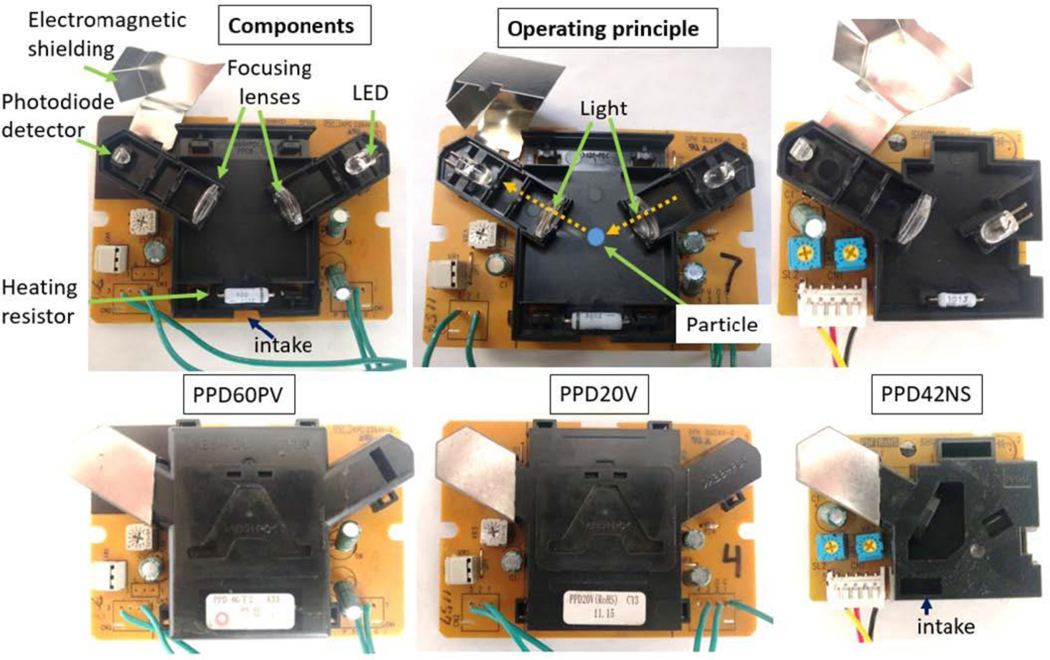
This figure shows the 3 Shinyei sensors the PPD60PV, PPD20V, and PPD42NS with the front cover removed (top) and attached (bottom). Components are similar across devices and have been labeled on the opened PPD60PV. The operating principle is shown on the open PPD20V where a particle is shown scattering the light from the LED into the photodiode detector.
The PPD42NS is a digital sensor: it provides a binary high or low output and sends pulses when particles are detected in the beam. These pulses are summed, and the fraction of time when pulses occur over the total time is calculated. In application, the researcher can use this ratio output from the PPD42NS to estimate particle mass concentrations by calibrating against a reference instrument. The manufacturer reports that the PPD42NS detect particles greater than 1 μm in size (Shinyei Kaisha, 2002; SHINYEI Technology Co., LTD, 2010) but previous work has found its most effective detection range is from about 2.5–4 μm (Kuula et al., 2017). This is the least expensive of the three sensors. The sensing volume is open unlike the PPD20V and PPD60PV sensors and there is no focusing lens to focus the light from the LED. The inlet is also offset to the side and front of the sensor (Fig. 1). Previous work compared the SHINYEI PPD42NS particle sensor to a variety of reference instruments both at US ambient concentrations (Holstius et al., 2014; Jiao et al., 2016) and in Xi’an, China, at higher ambient concentrations (Gao et al., 2015). The PPD42NS sensors have also been evaluated in lab experiments (Austin et al., 2015; Wang et al., 2015; Liu et al., 2017).
The other two SHINYEI sensors (PPD20V and PPD60PV) have an analog output, with a variable voltage depending on the light scattering occurring in the sensing volume. These sensors have the capability to function as digital sensors but were not used in this way for our experiments. Like the PPD42NS, the manufacturer reports that the PPD20V detect particles greater than 1 μm in size (Shinyei Kaisha, 2002; SHINYEI Technology Co., LTD, 2010) while the PPD60PV detects particles greater than 0.5 μm in size (SHINYEI Technology Co., LTD, 2013). All of these particle size detection descriptors were not substantiated by any published tests made available by the manufacturer, nor were further details regarding sensor design or test results provided by the manufacturer upon inquiry by the research team. Previous work with the PPD60PV has shown it is most effective at measuring particles from 0.7–1 μm (Kuula et al., 2017). With the front covers installed the PPD60PV and PPD20V sensors look almost identical but when opened it appears that different photodiodes have been used in the two sensors. The intake is aligned with the heating resistor in both cases and a focusing lens focuses both the light from the light source and light entering the detector (Fig. 1). Devices using the PPD60PV have been evaluated in the southeastern US (Jiao et al., 2016).
A Sensirion AG (Staefa, Zurich, Switzerland) temperature and relative humidity (RH) sensor (SHT15) was used to measure environmental conditions within the sampling enclosure. The SHT15 measures temperature by band-gap displacement and RH using a capacitive sensor (Sensiron, 2010). RH measurements are potentially important in the use of light scattering PM sensors. Past work has characterized the change in light scattering coefficient as a function of RH for anthropogenic aerosol. Based on this work, water uptake on aerosol particles may result in an increase in the light scattering coefficient, especially at RHs above 80% (Rood, 1987; McInnes et al., 1998). However, previous work with low-cost light scattering based sensors has seen mixed results as to whether RH corrections are required (Jiao et al., 2016).
These sensors were wired to an Arduino Mega microcontroller (Arduino, www.arduino.cc). The Arduino Mega was paired with a data logging shield (which includes a real-time clock) from Adafruit (New York, NY, USA). This shield logged the sensor’s analog signal or pulse ratio and stored time-stamped one-minute averages to comma- separated values (CSVs) on an SD card. These sensors were assembled into opaque plastic junction boxes. Slightly different configurations were used for the different field deployments.
A 6” × 6” × 4” box with sensors used during the Atlanta roadside testing (Fig. 2(a)). The box and additional electronics to run these sensors cost roughly $100. A 25- mm fan used to draw air into the instrument package and was positioned directly below the PM sensor. This was added to improve the flow of external air through the entire sampling box, as the heating resistor within each PM sensor would only provide minimal air turnover within the sensor. The air flow volume for the fan, as reported by the manufacturer, was 67 liters per minute so the exchange rate in the junction box is estimated to be approximately twice per second for the roadside setup. The exhaust flowed out the elbow on the right-hand wall of the box, and the instrument cables were threaded through the elbow as well.
Fig. 2.
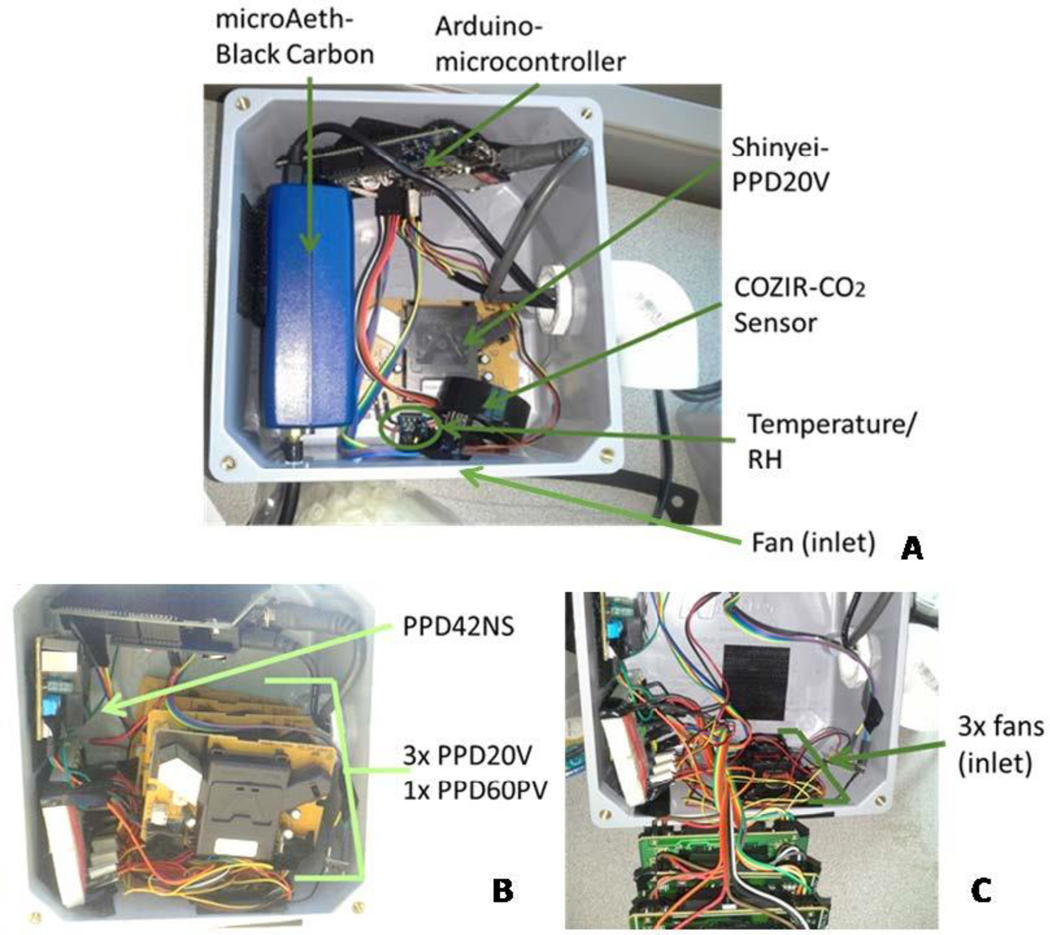
(a) Sensor package design used to test the PPD20V sensor during the Atlanta roadside testing (b) and (c) Shinyei particle sensor comparison box used during Hyderabad, India, and Atlanta rooftop testing.
During sensor comparison testing, a slightly different setup was used so that multiple PM sensors could be operated at the same time (Figs. 2(b) and 2(c)). In this case, three 25 mm fans were positioned to draw air into the instrument package and again, the exhaust flowed out an elbow. Four of the PM sensors, three PPD20V sensors, and a PPD60PV, were positioned directly above the fans. The PPD42NS was placed on the wall of the box perpendicular to the other sensors (Fig. 2). The three fans provided ample flow through the PPD42NS and temperature/RH sensors although not directly adjacent. Placing the PPD42NS further from the fan inlet allowed it to be further from openings in the package where stray light could enter and influence the results. This is more important for the PPD42NS since it has a more open light scattering chamber than the other two sensors. With three fans, the exchange rate in the junction box was estimated to be approximately six times per second for the comparison box, although possibly less due to flow resistance through the box. Given that the sensors measure the light scattering from a volume it is not expected that the estimated PM concentrations are a function of flowrate, although it is possible that particles losses, particularly for larger coarse particles that can impact on surfaces within the sampling box, are influenced by the flow rates. We did not assess the dependence of air flow on particle losses with the assumption that fine particulate mass concentrations are not influenced by particle losses, for the flow rates reported here.
Sensor Calibration and Evaluation
It is important to compare these sensors to reference methods in order to evaluate their performance, particularly as these sensors measure light scattering, not mass. Sensors were paired with reference analyzers in all locations. The relationship between the sensor light scattering signal and actual PM2.5 mass concentration is a function of the light scattering efficiency. The mass scattering efficiency depends on particle size, composition, and wavelength of light. Previous lab experiments have explored this relationship for low-cost sensors (Li and Biswas, 2017). For urban air, not dominated by dust mass, the mass scattering efficiency is generally not highly variable (Carrico et al., 2003). Work in both Atlanta as well as rural China in a location influenced by coal burning (Xu et al., 2004) have relatively similar mass scattering efficiencies and taken together suggest uncertainties related to particle properties for volume light scattering instruments in urban-influenced areas are roughly 30%.
A TSI DustTrak 8533 (Shoreview, MN) was used as a reference during the lab experiment. The DustTrak is a light scattering laser photometer. It provides real-time PM2.5 concentrations and in this case was configured to provide 1-minute averages. The Thermo Scientific series 1400a TEOM was also used as for the Atlanta projects. A PM2.5 cyclone was used with the TEOM. The TEOM is a US EPA Federal Equivalent Method (FEM) at a 24-hour averaged level and is used routinely for regulatory and research monitoring (EPA, 2015). A high-efficiency particulate air (HEPA) filter was attached to the inlet on the TEOM periodically to ensure that there were no leaks in the sampling line. Data and any instrument error flags were reviewed periodically and the instrument was checked for proper function. A Met One E-BAM was used as the reference monitor in Hyderabad. The E-BAM is a more portable monitoring option than a traditional BAM, operating in the environment without requiring an exterior enclosure (MOI, 2008). The E-BAM is not a registered FEM in the U.S., although the instrument strongly correlates with federal reference methods (USDA Forest Service, 2006) and has been used as a reference instrument in past studies (Ancelet et al., 2012). Periodic leak checks, flow checks, and monthly nozzle/vane cleanings were performed to ensure proper function of the E-BAM. It is worthwhile to point out that the difference in reference measurement methods may influence performance evaluations. Depending on the chemical composition of PM2.5 there can be biases between BAM and TEOM measurements (Chung et al., 2001). Low-cost sensors will have a variety of reference methods used for calibrations around the World, and it is important when reporting low-cost sensor data to be clear regarding the reference method that was used for calibration. We do not intend to evaluate reference methods used to measure PM2.5, but rather to use existing instruments that have been deemed as reference sensors and will realistically be those available to other researchers who conduct field studies.
A relationship between electrical output and PM mass concentration was generated for all three types of sensors using linear and orthogonal regression. Although the sensors are not size-selective, the sensor output is compared against a PM2.5 reference in order to understand their potential use as a surrogate measurement for PM2.5. First, the sensors were calibrated using linear regression and then orthogonal regression was applied to reduce the errors in both the X and Y directions. The first step (applying linear regression) is important as orthogonal regression assumes equal error in both directions and this will be a poor assumption if the sensors are on different scales. In the case of an apparent nonlinear relationship, an exponential function was applied instead. These relations were computed using the one-hour averages of the sensor and the reference analyzer for each field location. However, in the laboratory evaluations, the regression was developed at a higher time basis (one-minute data) since a higher time-resolution reference monitor was used. The standard deviation of the error (sd), the difference between reference analyzer and generated sensor concentration, was also estimated. Applying orthogonal regression, instead of linear regression alone, reduces the standard deviation of the error by up to about 5 μg m−3 depending on the sensor and sampling location. The lab experiments and 3 field projects had considerably different concentration ranges from less than 40 μg m−3 seen in the Atlanta projects to up to 280 μg m−3 in the Hyderabad project (Fig. 3) and in some cases, the data was subset to look at correlations over similar concentration ranges. The box plot in Fig. 3 shows the first and third quartiles around the median with whiskers extending up to the largest value or the third quartile plus 1.5 times the interquartile range whichever is smaller and whiskers extending down to the minimum or the first quartile minus 1.5 times the interquartile range, whichever is larger. Outliers are indicated by points outside the whiskers.
Fig. 3.
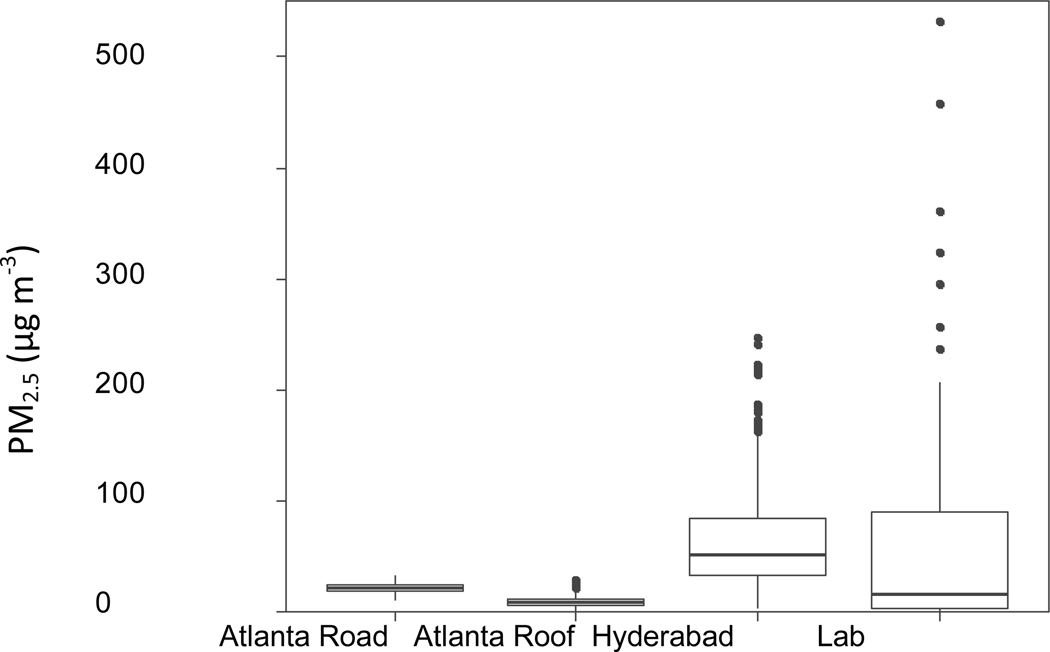
PM2.5 concentration ranges as measured by reference methods (1-hour data Atlanta and Hyderabad, 1-minute data lab).
Laboratory Evaluation: Experimental Design
A chamber experiment was run with the three PM sensors. A 284 liter modified sealed glove box with a slight positive pressure was used. A puff of incense smoke was introduced and the concentration was allowed to decay while clean air was pumped into the chamber. Over a 1-hour period, the concentration dropped from above 500 to ~0 μg m−3 as measured by a DustTrak 8533 (Fig. 4). The sensors were located inside the chamber. A short line of anti-static tubing ran from the chamber to the DustTrak and another line exhausted through a filter and into the lab. The correlation between the sensors and the DustTrak at a one-minute averaging time was determined.
Fig. 4.
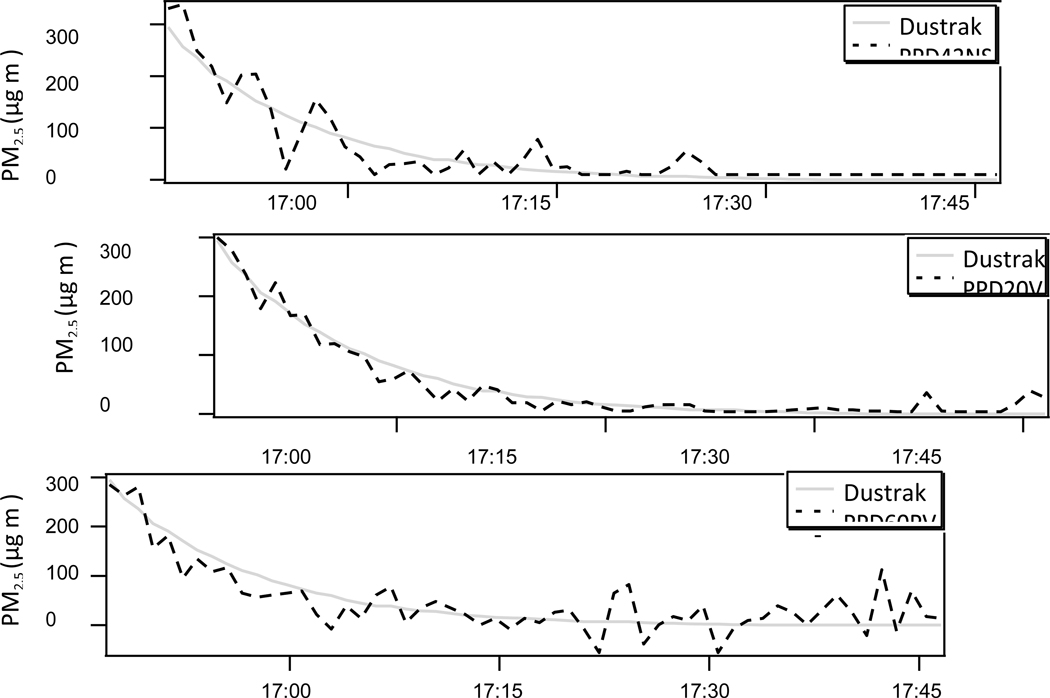
Chamber test using puff of incense smoke comparing performance of calibrated Shinyei PM sensors (PPD42NS, PPD20V, and PPD60PV) with TSI DustTrak.
Field Evaluation: Sampling Locations
Measurements from three different sampling locations (Atlanta rooftop, Atlanta roadside, and Hyderabad) were analyzed in this study (Table 2). The first measurement campaign was at the side of the freeway on the Georgia Tech campus, Atlanta, GA, (33.775560, –84.390950), adjacent to a 15-lane freeway with an Average Annual Daily Traffic (AADT) of 293,256 vehicles in 2014 (Interstate 75 & 85) (GDOT, 2014). The sensor box was mounted on a pole on top of a trailer approximately 4 meters above ground. The trailer was parked in a lot separated from the highway by only a fence, leaving the sensor package approximately 6 m from the closest lane of traffic. The TEOM inlet was within a few feet of the sensor package. Next, a comparison was performed on the rooftop of the Ford Environmental Science and Technology Building, a four-story building on the Georgia Tech campus, approximately 500 m from the freeway (33.779175, –84.395730). This rooftop site was above the tree level but there were a few structures on the roof such as an indoor rooftop laboratory and building air handling equipment. The inlet of the TEOM and the sensors were located within about 3 meters of each other. Lastly, the same sensor package that was deployed on the Atlanta rooftop was subsequently tested in Hyderabad (17.425798, 78.526814), located on a rooftop at the National Institute of Nutrition (NIN). The sensor package was attached to the E-BAM stand for nearly exact co-location.
Table 2.
Field locations, dates, reference instruments, and sensors deployed.
| Date | Location | Reference | Sensor Model |
|---|---|---|---|
| 10/1/13–10/4/13 | Atlanta Roadside (33.775560, 84.390950) | TEOM | Shinyei PPD20V |
| 11/21/13–12/16/13 | Atlanta Rooftop (33.779175, 84.395730) | TEOM | Shinyei PPD42NS |
| Shinyei PPD20V (3x) | |||
| Shinyei PPD60PV | |||
| 1/30/14–2/10/14 | Hyderabad Rooftop (17.425798, 78.526814) | E-BAM | Shinyei PPD42NS |
| Shinyei PPD20V (3x) | |||
| Shinyei PPD60PV |
RESULTS AND DISCUSSION
Laboratory Comparison
During the chamber experiment, the performance of the three SHINYEI sensors was evaluated by comparison with a DustTrak monitor. After a puff of incense was introduced into the chamber the concentration was allowed to decay for a 1-hour period (Fig. 4). One-minute averaged data were analyzed and the PPD20V yielded the highest correlation over all concentration ranges (R2 = 0.70 from 0–50 μg m−3 and R2 = 0.98 from 0–500 μg m−3) (Table 3). Meanwhile, the PPD60PV had poor correlation at low concentrations in the lab (R2 = 0.20 for 1-minute averages from 0–50 μg m−3 in the lab), but at higher concentrations the coefficient of determination was higher (R2 = 0.87, 0–500 μg m−3). Finally, the PPD42NS also correlated poorly with the DustTrak at lower concentrations (R2 = 0.20 from 0–50 μg m−3), but performed well over a larger concentration range (R2 = 0.80 from 0–500 μg m−3). Better agreement has been reported for the PPD42NS by Austin et al. (2015) (R2 = 0.66–0.99, depending on particle diameter from 0–50 μg m−3) than was seen in our laboratory results. Wang et al. (2015) also reported much higher R2 in their laboratory calibrations with incense (R2 = 0.95 from 0–100 μg m−3). The differing results may be due to longer rolling averaging times (Austin et al., 2015), longer sampling time (2.5 hours) (Wang et al., 2015), differences in microcontroller signal processing, manufacturer variability in sensor production, and difference in reference instruments (Austin et al., 2015; Wang et al., 2015). Kelly et al. (2017) also found higher correlations (R2 = 0.5–0.73) over a concentration range from 200–850 μg m−3, and using 10-minute averages.
Table 3.
Laboratory comparison of one-minute Shinyei PM sensor data with TSI DustTrak (R2) using puff of incense smoke in chamber.
| Concentration Range (μg m−3) Limit of Detection |
|||||
|---|---|---|---|---|---|
| Sensor | 0–500 | 0–200 | 0–100 | 0–50 | (μg m−3) |
| PPD42NS | 0.80 | 0.73 | 0.54 | 0.20 | 9.1 |
| PPD20V | 0.98 | 0.94 | 0.85 | 0.70 | 4.6 |
| PPD60PV | 0.87 | 0.49 | 0.10 | 0.04 | 29 |
The limit of detection (LOD) was calculated in the lab by using the 95% confidence interval of the intercept within the 0–100 μg m−3 range for one minute averaging times. The estimated PPD42NS LOD was 9.1 μg m−3 which is somewhat higher than measured in Wang et al. (2015) using 30- second data (4.59 μg m−3). The PPD20V has an LOD of 4.6 μg m−3 while the PPD60PV has a higher limit of detection of 29 μg m−3.
The challenge with using optically-based PM sensors to estimate mass concentration is that the actual response (i.e., sensor calibration) is largely a function of the properties of the ambient aerosol at the measurement location, including the size distribution and chemical composition. Further, the relationship can depend upon composition-related optical properties (Chow et al., 2002; Wang et al., 2015). Calibration to a mono- or poly-disperse calibration aerosol of a specific aerosol (e.g., sulfate or polystyrene latex), or to another particle source such as incense, can lead to biases as the actual response in the field can be significantly different (Jiang et al., 2011; Austin et al., 2015; Dacunto et al., 2015; Wang et al., 2015). It is likely that the response to a laboratory-generated aerosol will be much different to that in the field. The dependence on aerosol properties will also impact the LOD as aerosol properties can be associated with concentration (e.g., periods of high concentrations will have a different composition than at low concentrations). While laboratory tests are invaluable to isolate potential measurement artifacts and sensitivities to PM properties, field tests are likely most representative of real-world performance.
Ambient Concentration Comparisons: Atlanta Roadside
The first measurement campaign was at the side of the freeway in Atlanta. Reference PM2.5 readings ranging from fairly low (~10 μg m−3) to moderate (maximum of 32 μg m−3) concentration levels (Fig. 5). Previous work comparing light scattering from a nephelometer (Radiance Research Inc., M903 nephelometer) to a TEOM in urban Atlanta found a clear link between light scattering coefficient and PM2.5 (R2 = 0.8) (Carrico et al., 2003) with roughly 60% of the light scattering by particles greater than 0.5 um. However, the roadside comparison between the TEOM and the SHINYEI PPD20V sensor provided a low correlation (R2 = 0.21).
Fig. 5.
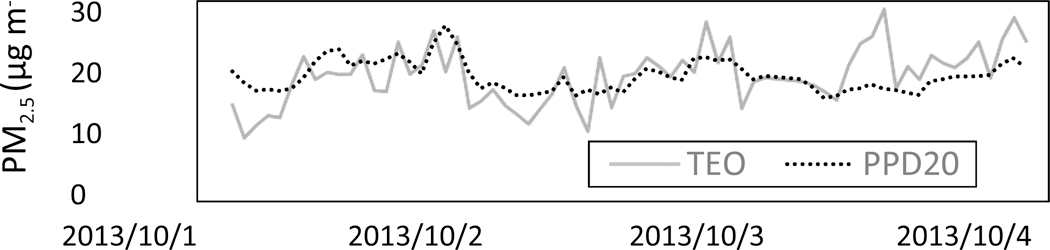
Atlanta roadside time series Shinyei sensor vs. TEOM.
The first 24-hours the sensors were located at the roadside were used as a calibration period. The R2 during this calibration period was 0.48 with an error of 0 ± 3.4 μg m−3. When this calibration was applied to the next 2 days of data the resulting hourly concentration error was larger 3.9 ± 4.8 μg m−3. Over this three-day campaign, the sensor and TEOM showed significant disagreement especially during the final 24 hours of sampling. In some cases, not only was there a difference in the magnitude of the response but also in the response sign. During this roadside comparison, temperature and RH had typical diurnal patterns for the southeast, ranging from 18–34°C, and 30–90%, respectively. The error between the SHINYEI and the TEOM was not significantly correlated with temperature (R2 = 0.01) or RH (R2 = 0.007); however, it should be noted that very high RH conditions were not experienced (no observations above 90% RH).
Some of the inaccuracies may lie in the TEOM (Allen et al., 1997), especially when using 1-hour averages for comparison. The concentrations were low at this location, which may cause a higher relative error in the TEOM.
Ambient Concentration Comparisons: Atlanta Rooftop
Next, a comparison was performed on the rooftop of the Ford Environmental Science and Technology Building in Atlanta, GA (Fig. 6). Testing occurred during December during colder weather (average temperature = 12°C) with 50% of the data being above 70% RH and 38% of the data above 80% RH. The concentrations of PM2.5 as measured by the TEOM were low (on average ~8 μg m−3), and the PPD60PV was the only sensor to achieve an R2 value above 0.1, with an R2 of 0.30. The first 4 days were used as a calibration period and the calibration was applied to the remaining data set. During the calibration period, the average PM2.5 concentration was 10.7 μg m−3 while during the second period it was only 6.8 μg m−3. During the calibration period the calibrated error was ± 7.7 μg m−3 during the application period it was about the same 1.5 ± 5.1. No trend was seen between the ratio of the sensor to the reference and the RH. This is a high relative error since the concentrations were so low during this period but may be an acceptable error for some applications.
Fig. 6.
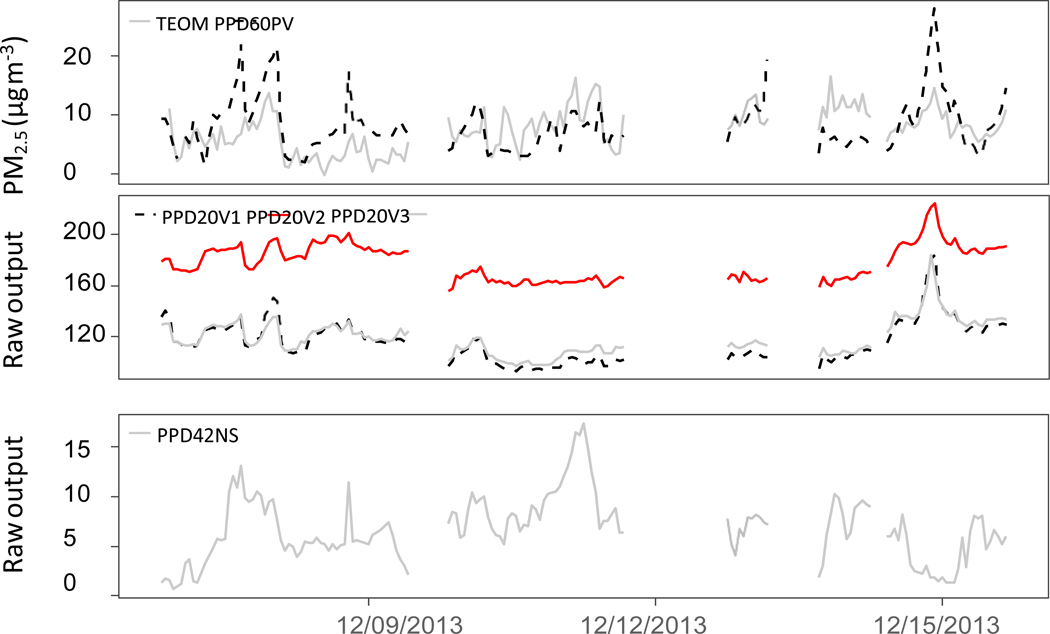
Atlanta Rooftop comparison (portion of the full time series analyzed) shows the raw signals from the PPD20V and PPD42NS low cost particle sensors along with the calibrated PPD60PV values compared with the concentrations recorded by the TEOM on a one-hour average.
While the three PPD20V sensors do show high within- sensor agreement with high correlations between them (R2 = 0.8–0.9), they do not agree well with the TEOM (R2 = 0.0–0.1). The PPD42NS also has low correlation with the TEOM (R2 = 0.0). This agreement is not improved by increasing the averaging interval to 24-hours or by adding temperature or RH corrections. Therefore, no calibrations were performed between the sensors and the TEOM, allowing no errors to be calculated. In their current configuration, all of the low-cost particle sensors had low to no correlation with the TEOM while measuring lower urban background concentrations. The high LODs calculated during the lab experiment also suggest the PPD60PV and PPD20V are not appropriate for low concentration ranges.
Ambient Concentration Comparisons: Hyderabad
Lastly, the same sensor package that was deployed on the rooftop in Atlanta was deployed on a rooftop in Hyderabad. The results from Hyderabad show higher average PM concentrations (1-hour averaged 72 μg m−3 range: 8–280 μg m−3) over the one-month deployment period (Fig. 8). There are two large gaps in the data - between 2/3–2/7 the sensors were unplugged, therefore no data were collected, and between 2/10–2/25 the E-BAM was malfunctioning causing either missing or error-flagged data.
Fig. 8.
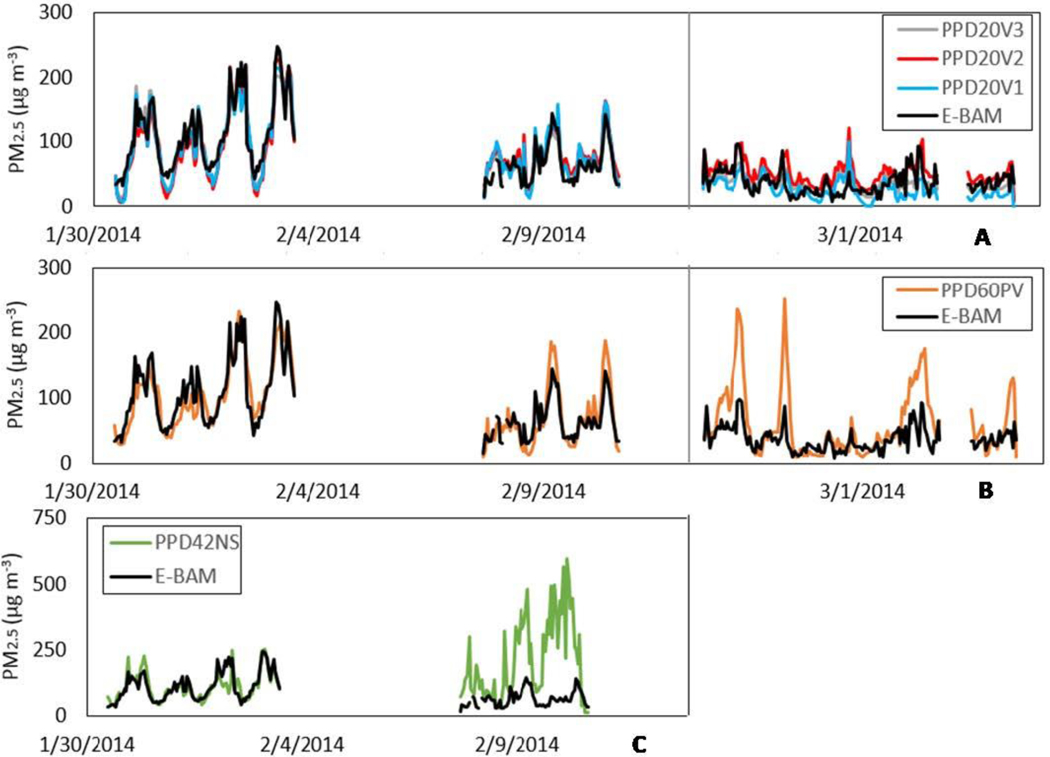
Hyderabad, India Shinyei PM sensors comparison with Environmental-Beta Attenuation Monitor (E-BAM) calibration generated during first half of time period and applied to second half.
The initial comparison between the PPD42NS and PPD20V sensors and the E-BAM indicated a linear relationship and correlation above our predefined lower limit R2 ≥ 0.1 (PPD42NS; R2 = 0.1, PPD20V-1; R2 = 0.84, PPD20V;−2 R2 = 0.81, PPD20V-3; R2 = 0.86). Therefore, voltage-concentration calibration equations were developed based upon the first few days of data (1/31–2/4 and 2/7–2/10) and applied it to later data (2/25–3/4) (Table 4). The relationships based on the first half are similar to those based on the full dataset. The concentrations experienced during the second half of the deployment are lower than during the first period (1st-period average: 91.1 μg m−3, range: 14.1–247 μg m−3, 2nd-period average: 37.0 μg m−3, range: 3.2–96.8 μg m−3). The average difference (davg), the difference between the SHINYEI and the TEOM, is near zero for every sensor during the first period since this was the period used for calibration.
Table 4.
Shinyei PM sensor calibrations generated from first half of Hyderabad data and their accuracy when applied during a second later period where (Estimate PM) = m × (raw sensor signal) + b for all sensors except the PPD60PV where a nonlinear calibration was used.
| Signal output | Calibration coefficients (PM = m × sensor + b) | calibration period | application period | ||||||
|---|---|---|---|---|---|---|---|---|---|
| m | b | Dates | average | standard deviation | dates | average error | standard deviation error | ||
| PPD42NSa | Digital | 40.0 | 13.3 | (1/31–2/4) | 0 | 28.9 | (2/7–2/10) | –149 | 145.3 |
| PPD20V1 | Analog | 0.45 | –75.5 | (1/31–2/4, 2/7–2/10) | 0 | 20.3 | (2/25–3/4) | 9.2 | 19.9 |
| PPD20V2 | Analog | 0.46 | –84.8 | (1/31–2/4, 2/7–2/10) | 0 | 21.6 | (2/25–3/4) | –15.9 | 16.3 |
| PPD20V3 | Analog | 0.39 | –50.4 | (1/31–2/4, 2/7–2/10) | 0 | 18.7 | (2/25–3/4) | –0.8 | 17 |
| PM = | Calibration period | Application period | |||||||
| c | d | dates | average | standard deviation | dates | average error | standard deviation error | ||
| PPD60PV | Analog | 123 | 2.8 | (1/31–2/4, 2/7–2/10) | 0 | 24.1 | (2/25–3/4) | –21.9 | 38.5 |
The three PPD20V sensors have similar standard deviations of the error around 15–20 μg m−3. There is no apparent consistent drift in the PPD20V sensor errors. At the high concentrations in Hyderabad above 200 μg m−3, the PPD20V sensors often became saturated (i.e., became insensitive to increases in ambient particle loading). This saturation occurred only 9 hours of the approximately 2-week period during which the measurements took place. The difference in concentration ranges during the calibration and application periods may lead to some of the error.
Simultaneous operation of three PPD20V sensors allowed comparison of sensors of the same type. The three PPD20V sensors were highly correlated (R2 > 0.9) and have similar coefficients of determination (0.81–0.86) with the E-BAM. PPD20V sensors 1 and 2 have similar calibrations with slopes of 0.45 and 0.46 while sensor 3 has a slope of 0.39. This slightly lower slope suggests the sensor is slightly more sensitive to changes in PM concentration. This is also suggested by the slightly higher R2 of the 3rd PPD20V sensor. Although this is a small sample size of sensors, these widely differing calibrations show the need for individual calibration for each sensor, even those of the same model. In addition, these calibration equations differ from that generated at the roadside in Atlanta.
The PPD60PV had larger errors than the PPD20Vs both during the calibration and application periods. The PPD60PV sensor in Hyderabad was the only sensor that was calibrated using a nonlinear fit as it becomes nonlinear around 100 μg m–3 (Fig. 7).
Fig. 7.
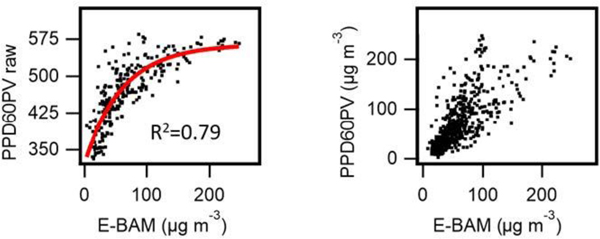
The raw analog output from the PPD60PV was first fit with an exponential fit exponential fit (Shinye I = a × ln(E–BAM) + b) before a linear correlation was calculated.
The performance of the PPD42NS decreased significantly over time, therefore 1/31–2/4 was used as the first calibration period, and 2/7–2/10 was used as the application period. This calibration was apparently not appropriate even during the 2/7–2/10 period with significant deviations indicating sensor drift or otherwise performance deterioration over time (Fig. 8(c)). Previous field with the PPD42NS in California has shown moderate correlations between the DustTrak and the PPD42NS (R2 = 0.64–0.70)and the BAM and the PPD42NS (R2 = 0.55–0.60) over field conditions up to 50 μg m−3 (Holstius et al., 2014) but this concentration range is larger than was seen in Atlanta and much smaller than seen in Hyderabad.
The RH was below 70% during most of the sample period. Only one hour data point was observed above 90% RH (91% RH). The ratio between the PPD20Vs with the E-BAM were uncorrelated with RH (R2 ≤ 0.02) and temperature (R2 = 0.02). The ratio of the PPD60PV to the E-BAM was also uncorrelated with temperature (R2 = 0.0001) and RH (R2 = 0.01).
Low Concentration Comparison of Laboratory and Field Results
The field projects and lab experiment discussed in this paper all have different concentration ranges. The data was subset into the low concentration range, 0–38 μg m−3, for comparability. This is a combination of the ranges seen in Atlanta at the roadside and roof sites (Fig. 9). Using the Hyderabad data subset to the same concentration range the same as the Atlanta roof (3–38 μg m−3, N = 121 hours, mean = 26 μg m−3) we see low correlations between the 20V sensors and the E-BAM (R2 ≤ 0.04), the PPD42NS sensor and the E-BAM (R2 = 0.003), and the PPD60PV and the E-BAM (R2 = 0.11). During the lab experiment, only the PPD42NS shows moderate correlation (R2 = 0.28) over the 0–38 concentration range. The signal to noise ratio for the sensors and the reference analyzers may be too high at these low concentrations as indicated by the LODs. Previous work in suburban Atlanta with similar average PM2.5 concentrations also saw poor performance of the PPD42NS (R2 = 0–0.16) and saw moderate correlation from sensors containing the PPD60PV sensors (R2 −0.42–0.43) (Jiao et. al., 2016).
Fig. 9.
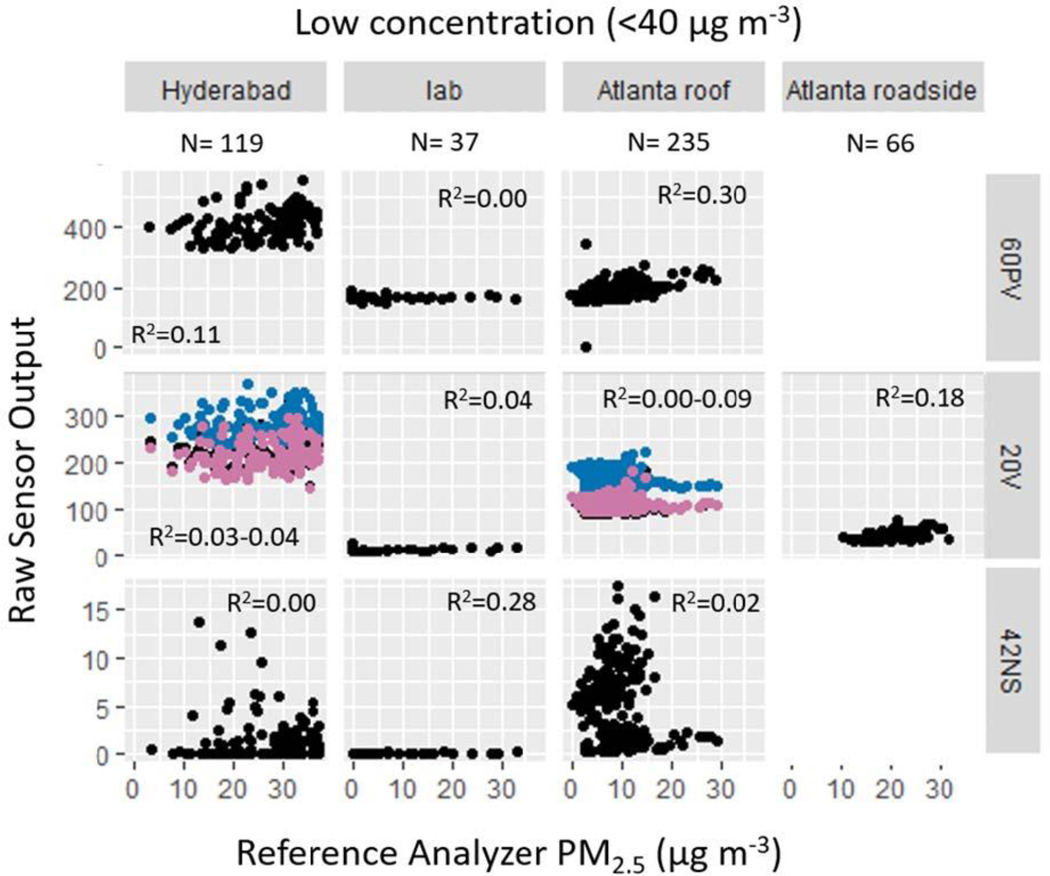
Comparison of subset of all datasets at low ambient PM2.5 concentrations seen in Atlanta (0–38 μg).
High Concentration Comparison of Laboratory and Field Results
The data from the lab was also subset for the concentration range experienced in Hyderabad (0–280 μg m−3) (Fig. 10). The lab results show significantly higher R2 for all sensors likely because of the stable environmental conditions and particle properties during the lab comparisons. The Hyderabad concentration range seems more appropriate for the PPD20V, while at the low concentrations observed in Atlanta, GA, the sensor agreed poorly with the reference measurements. Meanwhile, the PPD60PV agreed more closely with the reference TEOM at the background site but exhibited nonlinearity at high concentrations in Hyderabad. Previous work comparing an E-BAM and PPD42NS sensors has shown strong correlations (R2 = 0.85–0.92) over a much larger concentration range (> 800 μg m−3) (Gao et al., 2015).
Fig. 10.
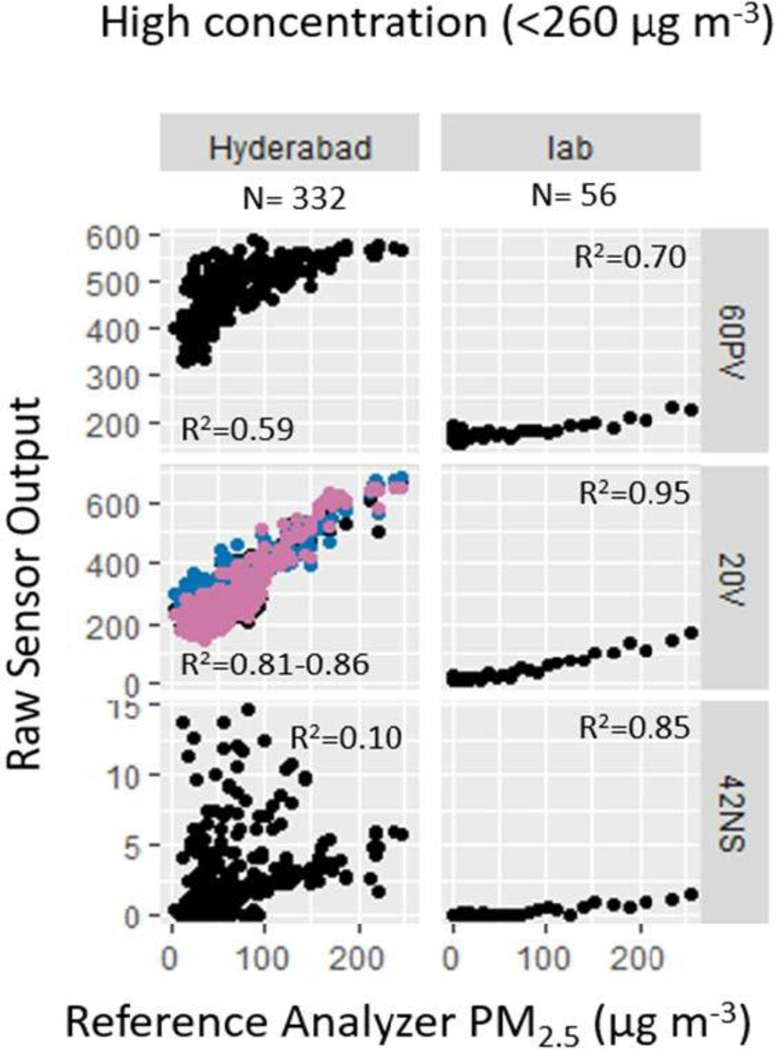
Comparison of Hyderabad data with subset of lab data at high ambient PM2.5 concentrations (0–260 μg m−3).
Differences between Field Site Results
A variety of factors affect light scattering, including particle size, shape, composition and relative humidity. The relationship between mass and light scattering is often highly correlated, but the relationship may be different in different locations and during different times of the year. If the mass scattering efficiency is changing on an hour to hour basis based on localized sources this would add more scatter into our data. Comparisons for PM2.5 mass and light scattering with nephelometers are usually done using only the fine size fraction and under dry conditions, where the sample is heated to decrease RH to provide the most accurate results (Chow et al., 2002). Our study took place under ambient conditions, and we did not separate the smaller size fraction. Adding in a size separation device, to remove particles greater than 2.5 μm, would significantly increase the cost and power consumption of particle sensor devices. In previous studies, total scattering has been compared with PM2.5 mass yielding linear relationships with high R2 values (≥ 0.9) (Watson et al., 1991; Doran et al., 1998; Chow et al., 2002), although past research using low cost light scattering sensors have generally reported as strong correlations (Gao et al., 2015; Jiao et al., 2016; Rai et al., 2017). It is possible the sensors could perform better in future studies in an improved enclosure with improved fan placement, or better light interference protection.
Much of the difference in sensor performance between the sites appears to be due to the significant differences in concentration ranges experienced in each location. In low concentration environments, the signal from the photodetector is often not above the noise level while at higher concentrations there appears to be a saturation point for some of the sensors. There are differences in sources and size distributions for each of the field campaigns and the lab experiments. Based on previous studies the air sampled on the Atlanta roof top should be primarily sulfate particles followed by particulate matter from vehicle emissions and a variety of other more minor sources including nitrate, wood burning, dust and secondary organic carbon (Lee et al., 2008). At the roadside in Atlanta, we would expect PM2.5 to be dominated by traffic emissions from both gasoline and diesel and to contain the same components of regional background sources similar to the rooftop. Previous work has shown the sources in Hyderabad to be primarily vehicular pollution with other sources including re-suspended dust, waste burning, other combustion sources (including industrial sources and coal and wood used for cooking and heating), and secondary PM (Gummeneni et al., 2011; Guttikunda et al., 2013; Guttikunda and Kopakka, 2014). Since previous work has suggested that these sensors may actually be measuring size fractions different from true PM2.5 (Kuula et al., 2017), the accuracy in different locations may be dependent on the particle size distribution in addition to chemical composition. If the size distribution is changing on an hourly averaged basis, as may be the case at a source-dominated site like the roadside, this will also add additional error to the results and likely contributes to differences in performance results between this and previous studies.
CONCLUSIONS
This study evaluated several low-cost particle sensors under several field environments representing typical areas where additional air monitoring data would be desirable – an urban near-highway environment in Atlanta, GA, an urban background environment in Atlanta, GA, and a highly polluted area of Hyderabad, India. The sensors selected are easily procured commercially and are growing in use by researchers building custom devices, incorporated into turnkey sensor packages (e.g., AirBeam, Air Quality Egg), or being applied in build-your-own sensor kit packages for citizen science. Although a limited number of sensors were tested in a limited number of locations, this work is the first step, after laboratory tests, in determining sensors suitability for different field applications.
Of the three sensor models studied, only the PPD20V appeared to have a strong agreement with a reference monitor and that occurred during high concentrations experienced in Hyderabad (average: 72 μg m−3; R2 ≥ 0.81). However, this same sensor had very weak agreement with a reference monitor next to a major roadway in Atlanta, Georgia (average = 21 μg m−3; R2 = 0.21), as well as when a subset of lower concentration periods were evaluated for the Hyderabad study. A different model sensor – the PPD60PV – displayed a nonlinear response at the high concentrations observed in Hyderabad, whereas it did not display this nonlinearity at similarly high levels in a controlled laboratory test using incense as an emissions source. In addition, the PPD60PV sensor appeared to have a moderate agreement (average = 8 μg m−3; R2 = 0.3) with a reference monitor at the urban background location in Atlanta, Georgia, whereas the other sensors tested had effectively no relationship. Finally, although the PPD42NS sensor displayed good agreement with a reference during the laboratory test with incense smoke, the sensor had effectively no agreement with reference monitors in any of the measurement environments.
These results suggest the PPD20V is most suited for ambient environments from 0–200 μg m−3 while the PPD60PV is better suited for environments from 0–50 μg m−3. None of the sensors tested appear well suited for providing useful 1-hour low ambient concentrations in the 0–15 μg m−3 range. The importance of evaluating low-cost particle sensors in their intended environment of use cannot be overstated.
ACKNOWLEDGMENTS
This work was made possible by the NSF PIRE grant 1243535 and EPA Star grant R83503901. Thanks to J. Jeyaraman, R. Weber, L. King, and J. Hu at Georgia Tech and to J. Marshall at the University of Minnesota.
Footnotes
DISCLAIMER
The contents of this paper are solely the responsibility of the grantee and do not necessarily represent the official views of the US EPA or NSF. Further, US EPA and NSF do not endorse the purchase of any commercial products or services mentioned in this paper. Although an EPA employee contributed to this article, the research presented was not performed or funded by and was not subject to EPA’s quality system requirements. Consequently, the views, interpretations, and conclusions expressed in the article are solely those of the authors and do not necessarily reflect or represent EPA’s views or policies.
REFERENCES
- Allen G, Sioutas C, Koutrakis P, Reiss R, Lurmann FW and Roberts PT (1997). Evaluation of the TEOM method for measurement of ambient particulate mass in urban areas. J. Air Waste Manage. Assoc 47: 682–689. [DOI] [PubMed] [Google Scholar]
- Ancelet T, Davy PK, Mitchell T, Trompetter WJ, Markwitz A and Weatherburn DC (2012). Identification of particulate matter sources on an hourly time-scale in a wood burning community. Environ. Sci. Technol 46: 4767–4774. [DOI] [PubMed] [Google Scholar]
- Austin E, Novosselov I, Seto E and Yost MG (2015). Laboratory evaluation of the Shinyei PPD42NS low-cost particulate matter sensor. PLoS One 10: e0137789. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bart M, Williams DE, Ainslie B, McKendry I, Salmond J, Grange SK, Alavi-Shoshtari M, Steyn D and Henshaw GS (2014). High density ozone monitoring using gas sensitive semi-conductor sensors in the Lower. Fraser Valley, British Columbia. Environ. Sci. Technol 48: 3970–3977. [DOI] [PubMed] [Google Scholar]
- Bossche J.V.d., Peters J, Verwaeren J, Botteldooren D, Theunis J and De Baets B. (2015). Mobile monitoring for mapping spatial variation in urban air quality: Development and validation of a methodology based on an extensive dataset. Atmos. Environ 105: 148–161. [Google Scholar]
- Carrico CM, Bergin MH and Xu J. (2003). Urban aerosol radiative properties: Measurements during the 1999 atlanta supersite experiment. J. Geophys. Res 108: 8422 [Google Scholar]
- Chow JC (1995). Measurement methods to determine compliance with ambient air quality standards for suspended particles. J. Air Waste Manage. Assoc 45: 320–382. [DOI] [PubMed] [Google Scholar]
- Chow JC, Watson JG, Lowenthal DH and Richards W. (2002). Comparability between PM2.5 and particle light scattering measurements. Environ. Monit. Assess 79: 29–45. [DOI] [PubMed] [Google Scholar]
- Dacunto PJ, Klepeis NE, Cheng KC, Acevedo-Bolton V, Jiang RT, Repace JL, Ott WR and Hildemann LM (2015). Determining PM2.5 calibration curves for a low-cost particle monitor: Common indoor residential aerosols. Environ. Sci. Processes Impacts 17: 1959–1966. [DOI] [PubMed] [Google Scholar]
- Doran JC, Bian X, de Wekker SFJ, Edgerton S, Fast JD, Hubbe JM, Shaw WJ, Whiteman CD, Abbott S, King C, Leach J, Mulhearn M, Russell C, Templeman B, Wolfe D, Archuleta J, Elliott S, Fernandez A, Langley D, Lee JT, Porch W, Tellier L, Chow J, Watson JG, Coulter RL, Martin TJ, Shannon JD, White R, Martinez D, Martinez JL, Mora V, Sosa G, Mercado G, Pena JL, Salas R and Petty R. (1998). The IMADA-AVER boundary layer experiment in the Mexico City area. Bull. Am. Met Soc 79: 2497–2508. [Google Scholar]
- Duvall R, Long R, Beaver M, Kronmiller K, Wheeler M and Szykman J. (2016). Performance evaluation and community application of low-cost sensors for ozone and nitrogen dioxide. Sensors 16: 1698. [DOI] [PMC free article] [PubMed] [Google Scholar]
- EPA (2013). National ambient air quality standards for particulate matter; final rule. Federal Register 78: 3086–3287. [Google Scholar]
- EPA (2015). List of designated reference and equivalent methods. www.epa.gov/ttn/amtic/criteria.html.
- Gao M, Cao J and Seto E. (2015). A distributed network of low-cost continuous reading sensors to measure spatiotemporal variations of PM2.5 in Xi’an, China. Environ. Pollut 199: 56–65. [DOI] [PubMed] [Google Scholar]
- GDOT (2014). Permanent station 121–54 http://trafficserver.transmetric.com/gdot-prod/tcdb.jsp?siteid=121-5474.
- Gummeneni S, Bin Yusup Y, Chavali M and Samadi SZ (2011). Source apportionment of particulate matter in the ambient air of Hyderabad city, India. Atmos. Res 101: 752–764. [Google Scholar]
- Guttikunda SK, Kopakka RV, Dasari P and Gertler AW (2013). Receptor model-based source apportionment of particulate pollution in Hyderabad, India. Environ. Monit. Assess 185: 5585–5593. [DOI] [PubMed] [Google Scholar]
- Guttikunda SK and Kopakka RV (2014). Source emissions and health impacts of urban air pollution in Hyderabad, India. Air Qual. Atmos. Health 7: 195–207. [Google Scholar]
- Health Effects Institute (2010). Outdoor air pollution and health in the developing countries of Asia: A comprehensive review. Special Report I8. [Google Scholar]
- Heimann I, Bright VB, McLeod MW, Mead MI, Popoola OAM, Stewart GB and Jones RL (2015). Source attribution of air pollution by spatial scale separation using high spatial density networks of low cost air quality sensors. Atmos. Environ 113: 10–19. [Google Scholar]
- Holstius DM, Pillarisetti A, Smith KR and Seto E. (2014). Field calibrations of a low-cost aerosol sensor at a regulatory monitoring site in California. Atmos. Meas. Tech 7: 1121–1131. [Google Scholar]
- Jiang Q, Kresin F, Bregt AK, Kooistra L, Pareschi E, van Putten E, Volten H and Wesseling J. (2016). Citizen sensing for improved urban environmental monitoring. J. Sens 2016: 5656245. [Google Scholar]
- Jiang RT, Acevedo-Bolton V, Cheng KC, Klepeis NE, Ott WR and Hildemann LM (2011). Determination of response of real-time SidePak AM510 monitor to secondhand smoke, other common indoor aerosols, and outdoor aerosol. J. Environ. Monit 13: 1695–1702. [DOI] [PubMed] [Google Scholar]
- Jiao W, Hagler G, Williams R, Sharpe R, Brown R, Garver D, Judge R, Caudill M, Rickard J, Davis M, Weinstock L, Zimmer-Dauphinee S and Buckley K. (2016). Community Air Sensor Network (CAIRSENSE) project: Evaluation of low-cost sensor performance in a suburban environment in the southeastern United States. Atmos. Meas. Tech 9: 5281–5292. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Kelly KE, Whitaker J, Petty A, Widmer C, Dybwad A, Sleeth D, Martin R and Butterfield A. (2017). Ambient and laboratory evaluation of a low-cost particulate matter sensor. Environ. Pollut 221: 491–500. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Kumar P, Morawska L, Martani C, Biskos G, Neophytou M, Di Sabatino S, Bell M, Norford L and Britter R. (2015). The rise of low-cost sensing for managing air pollution in cities. Environ. Int 75: 199–205. [DOI] [PubMed] [Google Scholar]
- Kumar P, Martani C, Morawska L, Norford L, Choudhary R, Bell M and Leach M. (2016). Indoor air quality and energy management through real-time sensing in commercial buildings. Energy Build. 111: 145–153. [Google Scholar]
- Kuula J, Mäkelä T, Hillamo R and Timonen H. (2017). Response characterization of an inexpensive aerosol sensor. Sensors 17: 2915. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Landrigan PJ, Fuller R, Acosta NJR, Adeyi O, Arnold R, Basu N, Baldé AB, Bertollini R, Bose- O’Reilly S, Boufford JI, Breysse PN, Chiles T, Mahidol C, Coll–Seck AM, Cropper ML, Fobil J, Fuster V, Greenstone M, Haines A, Hanrahan D, Hunter D, Khare M, Krupnick A, Lanphear B, Lohani B, Martin K, Mathiasen KV, McTeer MA, Murray CJL, Ndahimananjara JD, Perera F, Potočnik J, Preker AS, Ramesh J, Rockström J, Salinas C, Samson LD, Sandilya K, Sly PD, Smith KR, Steiner A, Stewart RB, Suk WA, van Schayck OCP, Yadama GN, Yumkella K and Zhong M. (2018). The lancet commission on pollution and health. Lancet 391: 462–512. [DOI] [PubMed] [Google Scholar]
- Lee S, Liu W, Wang Y, Russell AG and Edgerton ES (2008). Source apportionment of PM2.5: Comparing PMF and CMB results for four ambient monitoring sites in the southeastern United States. Atmos. Environ 42: 4126–4137. [Google Scholar]
- Lewis A and Edwards P. (2016). Validate personal air- pollution sensors. Nature 535: 29–31. [DOI] [PubMed] [Google Scholar]
- Li J, Li H, Ma Y, Wang Y, Abokifa A, Lu C and Biswas P. (2018). Spatiotemporal distribution of indoor particulate matter concentration with a low-cost sensor network. Build. Environ 127: 138–147. [Google Scholar]
- Li JY and Biswas P. (2017). Optical characterization studies of a low-cost particle sensor. Aerosol Air Qual. Res 17: 1691–1704. [Google Scholar]
- Liu D, Zhang Q, Jiang J and Chen DR (2017). Performance calibration of low-cost and portable particular matter (PM) sensors. J. Aerosol Sci 112: 1–10. [Google Scholar]
- Manikonda A, Zíková N, Hopke P and Ferro A. (2016). Laboratory assessment of low-cost pm monitors. J. Aerosol Sci 102: 29–40. [Google Scholar]
- McInnes L, Bergin M, Ogren J and Schwartz S. (1998). Apportionment of light scattering and hygroscopic growth to aerosol composition. Geophys. Res. Lett 25: 513–516. [Google Scholar]
- Mead MI, Popoola OAM, Stewart GB, Landshoff P, Calleja M, Hayes M, Baldovi JJ, McLeod MW, Hodgson TF, Dicks J, Lewis A, Cohen J, Baron R, Saffell JR and Jones RL (2013). The use of electrochemical sensors for monitoring urban air quality in low-cost, high-density networks. Atmos. Environ 70: 186–203. [Google Scholar]
- MOI (Met One Industries, Inc.) (2008). E-BAM particulate monitor operation manual E-BAM-9800 Rev L. Grant Pass, Oregon, 75 pages. [Google Scholar]
- Pinto JP, Lefohn AS and Shadwick DS (2004). Spatial variability of PM2.5 in urban areas in the United States. J. Air Waste Manage. Assoc 54: 440–449. [DOI] [PubMed] [Google Scholar]
- PurpleAir (2017). Purpleair: Air quality monitoring, https://www.purpleair.com/.
- Rai AC, Kumar P, Pilla F, Skouloudis AN, Di Sabatino S, Ratti C, Yasar A and Rickerby D. (2017). End-user perspective of low-cost sensors for outdoor air pollution monitoring. Sci. Total Environ 607: 691–705. [DOI] [PubMed] [Google Scholar]
- Rood MJ, Covert DS and Larso TV (1987). Hygroscopic properties of atmospheric aerosol in Riverside, California. Tellus 39: 383–397. [Google Scholar]
- Sensiron (2010). Datasheet SHT1x (SHT10, SHT11, SHT15) humidity and temperature sensor. SENSIROIN- The Sensor Company, Staefa, Switzerland. [Google Scholar]
- Kaisha Shinyei (2002). Product specifications PPD20V. SP-30-E-99007 1–6. [Google Scholar]
- SHINYEI Technology Co., LTD (2010). Specification sheet of PPD42NS. 03–2010, SHINYEI Technology Co., LTD. [Google Scholar]
- SHINYEI Technology Co., LTD (2013). Product specifications PPD60PV-T2. SP-30-E-08003(V01), SHINYEI Technology Co., LTD. [Google Scholar]
- Snyder EG, Watkins TH, Solomon PA, Thoma ED, Williams RW, Hagler GSW, Shelow D, Hindin DA, Kilaru VJ and Preuss PW (2013). The changing paradigm of air pollution monitoring. Environ. Sci. Technol 47: 11369–11377. [DOI] [PubMed] [Google Scholar]
- Steinle S, Reis S, Sabel CE, Semple S, Twigg MM, Braban CF, Leeson SR, Heal MR, Harrison D, Lin C and Wu H. (2015). Personal exposure monitoring of PM2.5 in indoor and outdoor microenvironments. Sci. Total Environ 508: 383–394. [DOI] [PubMed] [Google Scholar]
- Stevens C, Williams R and Jones P. (2014). Progress on understanding spatial and temporal variability of PM2.5 and its components in the Detroit Exposure and Aerosol Research Study (DEARS). Environ. Sci. Processes Impacts 16: 94–105. [DOI] [PubMed] [Google Scholar]
- Tiwari S, Bisht DS, Srivastava AK and Gustafsson Ö (2015). Simultaneous measurements of black carbon and PM2.5, CO, and NOx variability at a locally polluted urban location in India. Nat. Hazards 75: 813–829. [Google Scholar]
- USDA Forest Service (2006). Smoke particulate monitors: 2006 update. [Google Scholar]
- Wang Y, Li J, Jing H, Zhang Q, Jiang J and Biswas P. (2015). Laboratory evaluation and calibration of three low- cost particle sensors for particulate matter measurement. Aerosol Sci. Technol 49: 1063–1077. [Google Scholar]
- Watson JG, Chow JC, Richards LW, Haase DL, McDade C, Dietrich DL, Moon D and Sloane CS (1991). The 1989–90 Phoenix, AZ Urban Haze Study. Volume II: The apportionment of light extinction to sources Final report to Arizona Department of Environmental Quality, 2005 W. Central Avenue, Phoenix AZ 85004, Desert Research Institute document; no. 8931 5F1, DRI, Reno, Nevada. [Google Scholar]
- Xu J, Bergin MH, Greenwald R, Schauer JJ, Bergin M, Shafer MM, Jaffrezo JL and Aymoz G. (2004). Aerosol chemical, physical, and radiative characteristics near a desert source region of northwest China during ACE-Asia. J. Geophys. Res 109: D19S03. [Google Scholar]
- Zhang T, Chillrud S, Ji J, Chen Y, Pitiranggon M, Li W, Liu Z and Yan B. (2017). Comparison of PM2.5 exposure in hazy and non-hazy days in Nanjing, China. Aerosol Air Qual. Res 17: 2235–2246. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Zikova N, Masiol M, Chalupa DC, Rich DQ, Ferro AR and Hopke PK (2017). Estimating hourly concentrations of PM2.5 across a metropolitan area using low-cost particle monitors. Sensors 17: 1922. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Zivin JG, and Neidell M. (2018). Air pollution’s hidden impacts. Science 359: 39–40. [DOI] [PubMed] [Google Scholar]