

Abstract

The photomechanical response of liquid crystal polymer networks (LCNs) can be used to directly convert light energy into different forms of mechanical energy. In this study, we demonstrate how a traveling deformation, induced in a liquid crystal polymer ring by a spatially modulated laser beam, can be used to drive the ring (the rotor) to rotate around a stationary element (the stator), thus forming a light-powered micromotor. The photomechanical response of the polymer film is modeled numerically, different LCN molecular configurations are studied, and the performance of a 5.5 mm diameter motor is characterized.
Keywords: liquid crystal polymer networks, photomechanic actuation, light-powered mechanics, micromotor, traveling wave motor
Introduction
“Can light drive a motor?” was the opening question asked in the seminal paper of Ikeda et al.1 In most power systems, light (solar) energy is converted either to directly useful heat (in solar thermal collectors) or to electric energy (in solar cells) to be used or stored. Converting light energy directly into mechanical energy is more challenging, although several approaches have been demonstrated at different scales, from the molecular to macroscopic.2−4 An attractive aspect here is the possibility of remotely powering mechanical devices with light (delivered either via free space propagation or through optical fibers), where using electrical conductors and/or currents is not feasible.
In 1975, De Gennes proposed the idea of anisotropic cross-linked polymer networks with the orientational order of nematogenic monomers,5 thus initiating research efforts to fabricate, understand, and use ordered, responsive polymers, in particular liquid crystal networks (LCNs). LCNs are solid polymers with a well-defined alignment of molecules (i.e., with a well-defined director of the molecular blocks), similar to that observed in liquid crystals, with a moderate to densely cross-linked network architecture. With partially anisotropic properties of the LC phase, LCNs have unique anisotropic properties, including the elastic ones. They may exhibit very large, reversible deformations in response to the external stimuli: heating,6 light triggering photochemical reactions,7,8 light inducing photothermal heating,6,9,10 external electric field,11,12 or the presence of solvent.13 Cross-linked chains of molecules undergo the order–disorder (anisotropic–isotropic) transition and, as a result, the material deforms in a way determined by the spatial distribution of the director and the spatio-temporal distribution of the stimulus, for example, light. Additional mechanical actuation modes may be available with light spectral14,15 or polarization16,17 degrees of freedom. Light-powered LCE elements18,19 have been used as micro-actuators in various configurations20,21 (cf.22 for a recent review on light-driven LC materials,23 on LCN and LC elastomers (LCE) soft robots and24 on LCN and LCE actuators).
A light-driven motor utilizing the contraction (expansion) of an azobenzene-containing LCE laminated with a polyethylene film upon UV (visible) light irradiation was reported by Yamada et al.1 The motor presented by Geng et al.25 used a looped stripe of a hydroxypropylcellulose film that deformed under humid air to drive a rotating element. The LCE rod, described in ref (26) can roll with either a light beam or a heated surface as the energy source. Recently, different modes of deformations in LCE tubes and helical ribbons have been demonstrated as drives for centimeter-scale light-powered rolling vehicles.27
In this paper, we present a rotary micromotor, inspired by the ring-shape piezoelectric ultrasonic motors (USMs), often used in the auto-focusing mechanism of compound lenses, for example, in SLR cameras. USMs of this type have a piezoelectric ring actuator in which a traveling mechanical flexural wave is electrically generated and it drives a rotor via friction coupling28−30 (Figure 1). Our micromotor has a ring-shaped rotor made of an LCN film with a radial or azimuthal director orientation of the director at each surface. An all-optical method employing photo-oriented azopolyimide layers for generating arbitrary two-dimensional director distribution in the LCN film was used for the first time. The principle of a photo-induced traveling deformation in an LCN element, combined with friction coupling that earlier allowed us to demonstrate a life-size crawling caterpillar soft robot,31 now also proved to be well suited for the rotary micromotor design. In the USM-inspired micromotor, the traveling deformation is generated in the ring rotor by the photomechanical response due to light absorbed from a spatially modulated (rotated) laser beam.
Figure 1.
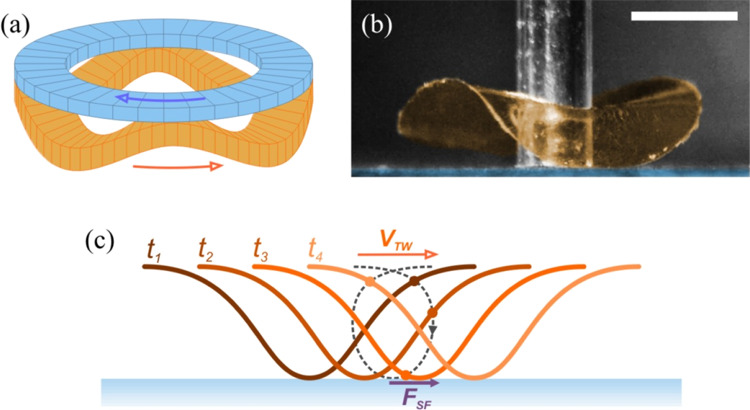
(a) Dynamic deformation induced in the stator (orange) interacts via friction forces with the rotor ring (blue). (b) Traveling deformation of the liquid crystalline polymer ring (orange), induced by a spatially modulated laser beam, interacts with the stationary substrate (blue), and thus, the ring rotates around the vertical axis. (c) Photothermally induced deformation traveling along the rotor circumference (time t1 < t2 < t3 < t4, VTW—velocity of the traveling wave) results in each point on the surface following a regular orbit (grey dashed line). When the rotor comes in contact with a stationary substrate, the static friction force FSF acts on the rotor and sets it in motion. The white scale bar is 2 mm long. Panel (a) is adapted from.32
Experimental Section
Liquid Crystal Polymer Network Film
The liquid crystal cross-linked polymer mixture is based on commercially available compounds and contains 78 wt % of the LC monomer (Synthon), 20 wt % of the LC cross-linker (Synthon), 1 wt % of the photoinitiator (Irgacure 369, Sigma-Aldrich), and 1 wt % of the dye (Disperse Red 1, Sigma-Aldrich), as reported in ref (31). The orange dye provides efficient green laser light absorption. All the compounds were melted and stirred on a hot plate in a glass flask at 80 °C.
To prepare LCN films with a proper molecular orientation, a photopatterning technology was used. Glass slides were spin-coated with a newly synthesized photoalignment azopolyimide (PI) solution (∼1%) in N-methyl-2-pyrrolidone, dried, and heated at 130 °C for 2.5 h to evaporate the solvent. Chemical structure and characterization of the PI are presented in the Supporting Information. To create radial or azimuthal distribution of the director in the LCN film, the polyimide orienting layers were exposed to linearly polarize UV light with wavelengths in the 345–380 nm band (Hamamatsu LC8 Xe-Hg UV lamp with a Glan-Taylor prism polarizer) with 15 mW/cm2 intensity at the glass plane for 1 h. A wedge-shaped aperture was used in the UV beam, and the substrate was rotated continuously during the exposure. Two substrates were assembled to form a 25 μm cell with the azimuthal–azimuthal (A–A) or azimuthal–radial orientation (A–R, also known as circular twisted nematic;33 Figure 2). The cell was filled with the molten LCN mixture on a hot plate at 80 °C and cooled slowly (2 °C/min) to 40 °C. The LCN layer, with the director distribution defined by the LCE interaction with the orienting layers, was then polymerized with 380 nm UV LEDs for 20 min at 40 °C. After being dipped in water at room temperature, the cell was wedged open, the LCN film was removed and the rotor ring (5.5 mm outer diameter, 1.3 mm inner diameter) was cut with a razor blade.
Figure 2.
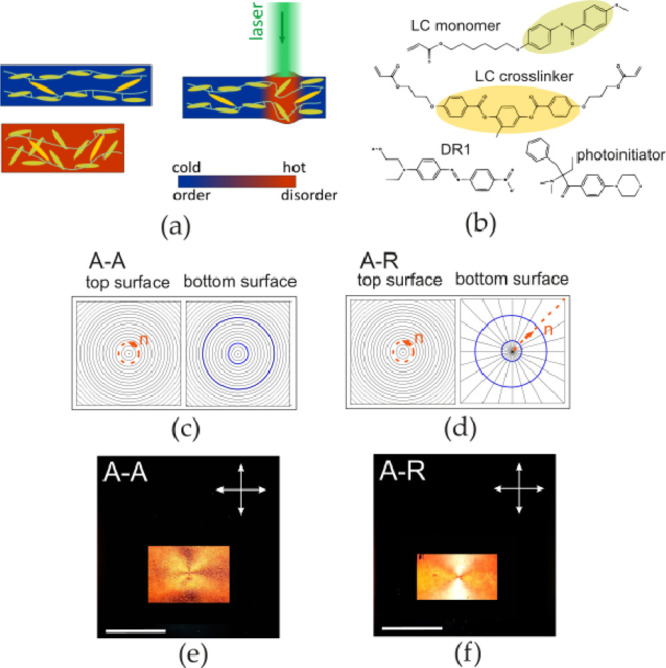
(a) Cross-linked polymer chains (yellow) arranged in one direction in an LC polymer network stripe deform locally because of increased temperature. With efficient light-absorbing dye, the heating can be induced by light absorption from a laser beam. (b) LC monomer, cross-linker, dye (Disperse Red 1) and photoinitiator used in the LCN. The coloring is consistent with panel (a). (c,d) Orientation of the molecular director n at the top and bottom surfaces of the cells used for preparing the LCN films: azimuthal (A) and radial (R). Two types of LCN films were prepared: A–A and A–R. Blue rings present how the micromotor rotor was cut from the film. (e,f) A–A and A–R cells filled with the LCN mixture, observed with a polarizing optical microscope (the arrows indicate the polarizer and analyzer orientation). The white scale bars in the photos are 10 mm long.
Differential scanning calorimetry (DSC) of the LCN film was used to determine the glass transition temperature (Tg) and the LC phase transitions (Figure S2 in the Supporting Information). The material has Tg of 11 and 7 °C upon heating and cooling, respectively, and the isotropization temperatures of 120 and 95 °C upon heating and cooling, respectively. The dynamic mechanical thermal analysis (DMTA) reveals the α relaxation corresponding to the glass–rubber transition (Figure S3 in the Supporting Information). The loss modulus peak and the inflection point of the storage modulus drop were observed at 17 °C, close to the values obtained from DSC.
Experimental Setup
A CW 532 nm laser (Verdi V-5, Coherent, 5.0 W maximum power, Gaussian beam full width at half maximum equal 1.9 mm at the LCN ring plane) was used to power the micromotor. The beam was steered with a rotating mirror to follow a 1.7 mm radius circular path (Figure 3a). The LCN was in contact with a sandpaper substrate (2000 grit) and could rotate freely around a stationary axis (a glass tube or steel rod). In our earlier works on light-driven microrobots based on photomechanically induced traveling wave,31 we tested several substrates, including glass, paper, and different sandpapers, with different tribological properties. For the current experiments, we have chosen the substrate that proved to perform best in terms of the friction coupling and thus the motor performance. The static friction coefficient between the rotor and the substrate μ = 1.19 ± 0.04 was measured by pulling a flat LCN film over the substrate and recording the minimum force (Lutron FG-5000A force gauge) needed to set it in motion under a given load. A video camera (DLT Cam PRO 5 MP, 30 frames/s) was used to record the ring deformation and the motor rotation. A paint mark on the LCN ring edge was used to track and analyze the motion of the micromotor rotor. An IR imaging camera (Fluke Ti400) was used to record the time-dependent temperature distribution in the rotor.
Figure 3.
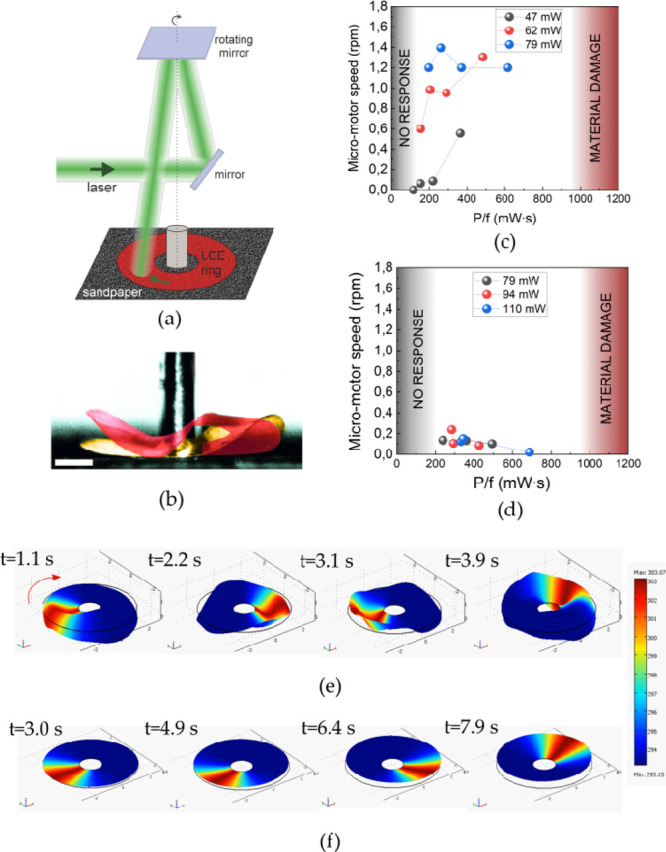
(a) Schematic of the experimental setup. The laser beam is reflected from a rotating mirror and sweeps around the LCN rotor ring. (b) Static LCN ring deformation due to the photomechanical response: yellow and red (computer-added colors) areas are images of the ring without and with the laser on, respectively. The white scale bar in the photo is 1 mm long. (c) LCN micromotor speed varies with the increasing P/f ratio, where P is the laser power and f is the mirror rotation frequency. Rotor with A–R orientation. (d) Same as (c) for the rotor with A–A orientation. (e) Snapshots of the numerical simulation of the traveling LCN ring deformations for the A–R orientation. (f) Same as (e) for the A–A orientation.
Numerical Simulations of the Photothermal Deformation
Finite element numerical simulations of the rotor ring deformation dynamics were performed in COMSOL Multiphysics using the Solid Mechanics Module. In the model, laser illumination locally raises the temperature of the LCN ring and thus reduces the liquid crystal order, causing the ring to contract along the local director, and at the same time to swell in the perpendicular dimensions. The photomechanical deformation is modeled by introducing a local photo-strain tensor εph(x) = εph [(1 + ν) n × n – νI] into the stress (σ)–strain (ε) constitutive relation: σ(x) = C:[ε(x) – εph(x)], where C is the stiffness tensor of the ring, εph(x) is the photo-induced strain along the director n and the Poisson ratio of the ring ν = 0.5. The simulation results are presented in Figure 3e,f and in the Supporting Information Movies 3 and 4 for the two molecular orientations in the LCN rotor ring. The simulations indicate that the light-induced stress in the rotor ring indeed results in a traveling deformation, following the spatially modulated laser beam. The model we use is able to predict the qualitative dynamics of the circular rotor with different molecular orientations—the exact shape of the deformation in the experiments is more complex, as there are other factors involved, not accounted for in the model: residual stress from the LCN film fabrication, (anisotropic) thermal expansion, and nonlinear relation between the deformation and the light intensity (becoming more important for the light intensities where the photomechanical response saturates).
Results and Discussion
Light-Powered Deformation and the Traveling Wave Micromotor Rotary Motion
In our LCN micromotor, the rotor deformation is realized by photoheating34—laser light absorption (25 μm film absorbs ∼90% of the incident green light) which induces a reversible nematic–isotropic phase transition in the liquid crystal polymer network. As a result, an LCN stripe with homeotropic alignment locally contracts (expands) in the direction parallel (perpendicular) to the molecular alignment (director) and as a result the initially near-flat ring deforms into a complex three-dimensional shape35−37 (Figure 3b). More complex, patterned alignments may provide more sophisticated shape-reconfigurable surfaces from flat LCE or LCN sheets,38 in particular the azimuthal–azimuthal (A–A) orientation in a flat film results in a conical deformation, whereas radial (R–R) orientation makes the film deform into a saddle.33,39
With the laser power and the scanning speed adjusted properly, a traveling macroscopic deformation of the LCN is observed, which results in a rotary motion of the ring via friction coupling with the substrate (Supporting Information Movies 1 and 2). The LCN ring deformation resembles the traveling wave of an ultrasonic ring motor. The light-driven motor works in the regime where the laser-induced polymer film temperature increases only locally and, as the light beam moves away, it decreases with a time constant of the order of tens to hundreds of milliseconds, mainly due to conductive heat transfer to the surrounding air.31,34 As a result, after many scan cycles (rotations), the average temperature of the rotor remains close to the room temperature, and there is a significant difference in the temperature between the illuminated area (spot) and the surrounding film—Supporting Information Movie 5 shows the temperature distribution in the moving rotor, visualized with an IR camera.
Depending on the molecular alignment in the LCN ring, the actuation in response to the local temperature increase varies. For the azimuthal (A–A) alignment, the ring contracts circularly and swells along the radius and in thickness. The A–R film bends locally, within a sector of around 70°, toward the substrate (sandpaper) and the neighboring sectors bend up and lose contact with the substrate (Figure 3b). If the laser scanning speed is slow enough, the ring deformations follow the laser beam around the ring—Movies 1 and 2 in the Supporting Information.
The micromotor rotation speed depends on the light energy absorbed in the material within a given time that is proportional to P/f, where P is the laser power and f is the mirror rotation frequency (in turns/s).34 For a constant laser power, the motor speed increases with the increasing beam scanning speed, up to a point where the time constant governing the photomechanical response in the LCN is too large to allow for enough heat to accumulate and produce a significant ring deformation (Figure 3c). For low laser powers, the film reaches the regime where no significant deformation is present, while at the other extreme of high laser powers, material damage results. For the A–R alignment, there is no visible difference between the configurations with the A or R side facing up (toward the laser). The micromotor with the A–R LCN ring rotates around ten times faster than the one with the A–A LCN rotor (Figure 3d)—the conical rotor deformation induced in the latter case is not as efficient in the friction coupling to the stator (compare also the trajectory analysis below).
Movie 6 in the Supporting Information demonstrates how the rotor can be friction-coupled to an external axis (made of a 2.1 mg paper tube, compared to a rotor mass of 0.8 mg) to deliver a usable mechanical power output.
Tracking one point at the edge of the LCN rotor offers some insight into the rotor ring deformation and the micromotor kinematics. For the A–A oriented film, the point at the rotor circumference follows a spiral trajectory, reversing after each step, and at the same time, the steps are more regular and shorter . In the case of the A–R orientation, such a point follows a sine-like trajectory, with the motor segments moving in large steps after each laser beam sweep. (Figure 4). The A–A motor needs 172 s to perform a 90° rotation with the average angular frequency ω = 0.009 rad/s while the A–R motor makes a full 360° rotation in 64 s with average ω = 0.098 rad/s. The micromotor efficiency, defined as the ratio between the motor revolutions per minute to the laser beam rotations per minute, is between 0.4 and 0.6% for the A–A orientation and between 4.7 and 8.3% for the A–R orientation.
Figure 4.

Measured trajectory of one point at the LCN ring edge for two film orientations: A–A (a,c) and A–R (b,d). The white scale bars are 1 mm long. (a,b) Measured (tracked) position of the point at the rotor circumference. (c,d) x and y coordinates of the points in (a,b) vs time.
Conclusions
Our results show that dynamic photothermally induced deformations in liquid crystal elastomer films can drive rotary motion on a small (millimeter) scale. We harnessed the time-dependent mechanical response of a properly oriented LCN ring, combined with friction coupling to power a rotary micromotor resembling ultrasonic piezoelectric ring motors. In such an elastomer film rotor, the molecular alignment defines the deformation topology, while the photomechanical response time constant, the absorbed light energy and the laser beam scanning speed determine the motor speed. As the A–A orientation offers a more regular motion, it may be more suitable for applications where regulation is of primary importance, rather than the net rotation speed. The irregularities in the rotor with the A–R orientation most likely originate from a combination of the nonlinear dependence of the photomechanical response to the light intensity, anisotropic thermal expansion of the rotor, and the residual stress in the polymer film.
Most of the polymer light-driven motors and drives presented to date rely on shifting the center of the mass position by photo-induced deformation in a contacting, bending, or twisting element(s)—as a result, the system finds a new, different equilibrium position and this generates motion. Our motor uses the friction coupling between two elements to generate rotary motion and as such is, in principle, independent from gravity.
Despite the low speed and poor efficiency, the LCN micromotor presents a new approach to small-scale mechanics and micro-scale drives and opens up a new class of light-powered, friction-coupled actuators, for example, based on the inchworm drive principle. With the current LCN technology, also using laser photolithography, it can be directly scaled down to sub-millimeter dimensions40,41 and may find applications in areas where devices must be powered and controlled remotely and/or without electrical currents being involved.
Acknowledgments
This work was generously supported by the National Science Center (Poland) with grant No. 2018/29/B/ST7/00192, by the Polish Ministry of Science and Higher Education (MNiSW) “Diamentowy Grant” project No. DI2016 015046, and by the Ministry of National Defense (Poland) Program—Research Grant MUT Project 13-995. C.X. acknowledges support of the Key Program Special Fund (KSF) KSF-E-53 at XJTLU.
Supporting Information Available
The Supporting Information is available free of charge at https://pubs.acs.org/doi/10.1021/acsami.9b20309.
Chemical structure and characterization of the PI, DSC, and DMTA characterization of the LCN films (PDF)
Rotating micro-motor with A–R orientation (MP4)
Rotating micro-motor with A–A orientation (MP4)
Numerical simulation results for the photomechanical response of an LCN rotor ring with A–R orientation (MP4)
Numerical simulation results for the photomechanical response of an LCN rotor ring with A–A orientation (MP4)
Temperature distribution in the rotating micro-motor (MP4)
Ring micro-motor turning a tube on the axis (MP4)
Author Contributions
K.D. and M.R. contributed equally. K.D., M.R., and P.G. fabricated the micro-motor and performed the experiments. They also built the experimental setup with contributions from P.W. who conceived the idea of the LCN traveling wave motor. R.W. and W.P. prepared the photo-aligning cells. J.K. and E.S.-B. synthesized the photo-alignment azo(polyimide)s. C.X. performed the numerical simulations. K.D. and P.W. wrote the manuscript with contributions from all authors. All the authors analyzed and discussed the results.
The authors declare no competing financial interest.
Supplementary Material
References
- Yamada M.; Kondo M.; Mamiya J.-i.; Yu Y.; Kinoshita M.; Barrett C. J.; Ikeda T. Photomobile Polymer Materials: Towards Light-Driven Plastic Motors. Angew. Chem., Int. Ed. 2008, 47, 4986–4988. 10.1002/anie.200800760. [DOI] [PubMed] [Google Scholar]
- Wang H.; Pumera M. Fabrication of Micro/Nanoscale Motors. Chem. Rev. 2015, 115, 8704–8735. 10.1021/acs.chemrev.5b00047. [DOI] [PubMed] [Google Scholar]
- Xu L.; Mou F.; Gong H.; Luo M.; Guan J. Light-Driven Micro/Nanomotors: From Fundamentals to Applications. Chem. Soc. Rev. 2017, 46, 6905–6926. 10.1039/c7cs00516d. [DOI] [PubMed] [Google Scholar]
- Chen H.; Zhao Q.; Du X. Light-Powered Micro/Nanomotors. Micromachines 2018, 9, 41. 10.3390/mi9020041. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Degennes P. G. One Type of Nematic Polymers. C. R. Seances Acad. Sci., Ser. B 1975, 281, 101–103. [Google Scholar]
- Sawa Y.; Urayama K.; Takigawa T.; DeSimone A.; Teresi L. Thermally Driven Giant Bending of Liquid Crystal Elastomer Films with Hybrid Alignment. Macromolecules 2010, 43, 4362–4369. 10.1021/ma1003979. [DOI] [Google Scholar]
- Yu Y.; Nakano M.; Ikeda T. Directed Bending of a Polymer Film by Light - Miniaturizing a Simple Photomechanical System Could Expand its Range of Applications. Nature 2003, 425, 145. 10.1038/425145a. [DOI] [PubMed] [Google Scholar]
- Braun L.; Linder T.; Hessberger T.; Zentel R. Influence of a Crosslinker Containing an Azo Group on the Actuation Properties of a Photoactuating LCE System. Polymers 2016, 8, 435. 10.3390/polym8120435. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Pevnyi M.; Moreira-Fontana M.; Richards G.; Zheng X.; Palffy-Muhoray P. Studies of Photo-Thermal Deformations of Liquid Crystal Elastomers Under Local Illumination. Mol. Cryst. Liq. Cryst. 2017, 647, 228–234. 10.1080/15421406.2017.1289599. [DOI] [Google Scholar]
- Yang H.; Buguin A.; Taulemesse J.-M.; Kaneko K.; Méry S.; Bergeret A.; Keller P. Micron-Sized Main-Chain Liquid Crystalline Elastomer Actuators with Ultralarge Amplitude Contractions. J. Am. Chem. Soc. 2009, 131, 15000–15004. 10.1021/ja905363f. [DOI] [PubMed] [Google Scholar]
- Urayama K.; Honda S.; Takigawa T. Electrooptical Effects with Anisotropic Deformation in Nematic Gels. Macromolecules 2005, 38, 3574–3576. 10.1021/ma0503054. [DOI] [Google Scholar]
- Spillmann C. M.; Ratna B. R.; Naciri J. Anisotropic Actuation in Electroclinic Liquid Crystal Elastomers. Appl. Phys. Lett. 2007, 90, 021911. 10.1063/1.2420780. [DOI] [Google Scholar]
- Urayama K. Selected Issues in Liquid Crystal Elastomers and Gels. Macromolecules 2007, 40, 2277–2288. 10.1021/ma0623688. [DOI] [Google Scholar]
- Kumar K.; Knie C.; Bleger D.; Peletier M. A.; Friedrich H.; Hecht S.; Broer D. J.; Debije M. G.; Schenning A. A Chaotic Self-Oscillating Sunlight-Driven Polymer Actuator. Nat. Commun. 2016, 7, 11975. 10.1038/ncomms11975. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Cheng Z.; Wang T.; Li X.; Zhang Y.; Yu H. NIR-Vis-UV Light-Responsive Actuator Films of Polymer-Dispersed Liquid Crystal/Graphene Oxide Nanocomposites. ACS Appl. Mater. Interfaces 2015, 7, 27494–27501. 10.1021/acsami.5b09676. [DOI] [PubMed] [Google Scholar]
- Tabiryan N.; Serak S.; Dai X.-M.; Bunning T. Polymer Film with Optically Controlled Form and Actuation. Opt. Express 2005, 13, 7442–7448. 10.1364/opex.13.007442. [DOI] [PubMed] [Google Scholar]
- Martella D.; Nocentini S.; Micheletti F.; Wiersma D. S.; Parmeggiani C. Polarization-Dependent Deformation in Light Responsive Polymers Doped by Dichroic Dyes. Soft Matter 2019, 15, 1312–1318. 10.1039/c8sm01954a. [DOI] [PubMed] [Google Scholar]
- Gelebart A. H.; Jan Mulder D.; Varga M.; Konya A.; Vantomme G.; Meijer E. W.; Selinger R. L. B.; Broer D. J. Making Waves in a Photoactive Polymer Film. Nature 2017, 546, 632–636. 10.1038/nature22987. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Liu X.; Kim S.-K.; Wang X. Thermomechanical Liquid Crystalline Elastomer Capillaries with Biomimetic Peristaltic Crawling Function. J. Mater. Chem. B 2016, 4, 7293–7302. 10.1039/c6tb02372j. [DOI] [PubMed] [Google Scholar]
- Ma S.; Li X.; Huang S.; Hu J.; Yu H. A Light-Activated Polymer Composite Enables On-Demand Photocontrolled Motion: Transportation at the Liquid/Air Interface. Angew. Chem., Int. Ed. 2019, 58, 2655–2659. 10.1002/anie.201811808. [DOI] [PubMed] [Google Scholar]
- Cheng Z.; Ma S.; Zhang Y.; Huang S.; Chen Y.; Yu H. Photomechanical Motion of Liquid-Crystalline Fibers Bending Away from a Light Source. Macromolecules 2017, 50, 8317–8324. 10.1021/acs.macromol.7b01741. [DOI] [Google Scholar]
- Bisoyi H. K.; Li Q. Light-Driven Liquid Crystalline Materials: From Photo-Induced Phase Transitions and Property Modulations to Applications. Chem. Rev. 2016, 116, 15089–15166. 10.1021/acs.chemrev.6b00415. [DOI] [PubMed] [Google Scholar]
- Zeng H.; Wasylczyk P.; Wiersma D. S.; Priimagi A. Light Robots: Bridging the Gap between Microrobotics and Photomechanics in Soft Materials. Adv. Mater. 2018, 30, 1703554. 10.1002/adma.201703554. [DOI] [PubMed] [Google Scholar]
- Ge F.; Zhao Y. Microstructured Actuation of Liquid Crystal Polymer Networks. Adv. Funct. Mater. 2020, 30, 1901890. 10.1002/adfm.201901890. [DOI] [Google Scholar]
- Geng Y.; Almeida P. L.; Fernandes S. N.; Cheng C.; Palffy-Muhoray P.; Godinho M. H. A Cellulose Liquid Crystal Motor: A Steam Engine of the Second Kind. Sci. Rep. 2013, 3, 1028. 10.1038/srep01028. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Ahn C.; Li K.; Cai S. Light or Thermally Powered Autonomous Rolling of an Elastomer Rod. ACS Appl. Mater. Interfaces 2018, 10, 25689–25696. 10.1021/acsami.8b07563. [DOI] [PubMed] [Google Scholar]
- Lu X.; Guo S.; Tong X.; Xia H.; Zhao Y. Tunable Photocontrolled Motions Using Stored Strain Energy in Malleable Azobenzene Liquid Crystalline Polymer Actuators. Adv. Mater. 2017, 29, 1606467. 10.1002/adma.201606467. [DOI] [PubMed] [Google Scholar]
- Morita T. Miniature Piezoelectric Motors. Sens. Actuators, A 2003, 103, 291–300. 10.1016/s0924-4247(02)00405-3. [DOI] [Google Scholar]
- Oh J.-H.; Jung H.-E.; Lee J.-s.; Lim K.-J.; Kim H.-H.; Ryu B.-H.; Park D.-H. Design and Performances of High Torque Ultrasonic Motor for Application of Automobile. J. Electroceram. 2009, 22, 150–155. 10.1007/s10832-008-9434-1. [DOI] [Google Scholar]
- Spanner K.; Koc B. Piezoelectric Motors, an Overview. Actuators 2016, 5, 6. 10.3390/act5010006. [DOI] [Google Scholar]
- Rogóż M.; Zeng H.; Xuan C.; Wiersma D. S.; Wasylczyk P. Light-Driven Soft Robot Mimics Caterpillar Locomotion in Natural Scale. Adv. Opt. Mater. 2016, 4, 1689–1694. 10.1002/adom.201600503. [DOI] [Google Scholar]
- Bar-Cohen Y.; Bao X. Q.; Grandia W. Rotary Ultrasonic Motors Actuated by Traveling Flexural Waves. Proc. SPIE 1999, 3668, 698–704. [Google Scholar]
- de Haan L. T.; Sanchez-Somolinos C.; Bastiaansen C. M. W.; Schenning A.; Broer D. J. Engineering of Complex Order and the Macroscopic Deformation of Liquid Crystal Polymer Networks. Angew. Chem., Int. Ed. 2012, 51, 12469–12472. 10.1002/anie.201205964. [DOI] [PubMed] [Google Scholar]
- Rogóż M.; Dradrach K.; Xuan C.; Wasylczyk P. A Millimeter-Scale Snail Robot Based on a Light-Powered Liquid Crystal Elastomer Continuous Actuator. Macromol. Rapid Commun. 2019, 40, 1900279. 10.1002/marc.201900279. [DOI] [PubMed] [Google Scholar]
- Küpfer J.; Finkelmann H. Nematic Liquid Single-Crystal Elastomers. Makromol. Chem., Rapid Commun. 1991, 12, 717–726. 10.1002/marc.1991.030121211. [DOI] [Google Scholar]
- Finkelmann H.; Nishikawa E.; Pereira G. G.; Warner M. A New Opto-Mechanical Effect in Solids. Phys. Rev. Lett. 2001, 87, 015501. 10.1103/physrevlett.87.015501. [DOI] [PubMed] [Google Scholar]
- Li M.-H.; Keller P. Artificial Muscles Based on Liquid Crystal Elastomers. Philos. Trans. R. Soc., A 2006, 364, 2763–2777. 10.1098/rsta.2006.1853. [DOI] [PubMed] [Google Scholar]
- McConney M. E.; Martinez A.; Tondiglia V. P.; Lee K. M.; Langley D.; Smalyukh I. I.; White T. J. Topography from Topology: Photoinduced Surface Features Generated in Liquid Crystal Polymer Networks. Adv. Mater. 2013, 25, 5880–5885. 10.1002/adma.201301891. [DOI] [PubMed] [Google Scholar]
- Ahn S.-k.; Ware T. H.; Lee K. M.; Tondiglia V. P.; White T. J. Photoinduced Topographical Feature Development in Blueprinted Azobenzene-Functionalized Liquid Crystalline Elastomers. Adv. Funct. Mater. 2016, 26, 5819–5826. 10.1002/adfm.201601090. [DOI] [Google Scholar]
- Zeng H.; Martella D.; Wasylczyk P.; Cerretti G.; Lavocat J.-C. G.; Ho C.-H.; Parmeggiani C.; Wiersma D. S. High-Resolution 3D Direct Laser Writing for Liquid Crystalline Elastomer Microstructures. Adv. Mater. 2014, 26, 2319–2322. 10.1002/adma.201305008. [DOI] [PubMed] [Google Scholar]
- Zeng H.; Wasylczyk P.; Parmeggiani C.; Martella D.; Burresi M.; Wiersma D. S. Light-Fueled Microscopic Walkers. Adv. Mater. 2015, 27, 3883–3887. 10.1002/adma.201501446. [DOI] [PMC free article] [PubMed] [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.