

Abstract
We study the regularity of the solution of Dirichlet problem of Poisson equations over a bounded domain. A new sufficient condition, uniformly positive reach is introduced. Under the assumption that the closure of the underlying domain of interest has a uniformly positive reach, the H2 regularity of the solution of the Poisson equation is established. In particular, this includes all star-shaped domains whose closures are of positive reach, regardless if they are Lipschitz domains or non-Lipschitz domains. Application to the strong solution to the second order elliptic PDE in non-divergence form and the regularity of Helmholtz equations will be presented to demonstrate the usefulness of the new regularity condition.
Keywords: Regularity, Poisson equations, uniformly positive reach, non-divergence form
MR(2010) Subject Classification: 35B60, 35J15, 35D35
1. Introduction
Developing efficient numerical methods for solving second order elliptic equations, e.g., Poisson equation, has drawn a lot of interest for many years. For example, numerical methods for the following second order elliptic equations in non-divergence form are recently studied in [25, 30] and [21]: Find u = u(x) satisfying
| (1.1) |
| (1.2) |
where Ω is an open bounded domain with a Lipschitz continuous boundary ∂Ω, aij ∈ L∞(Ω), and are standard second order differentiation operators. Because the coefficients aij are only in L∞(Ω), the PDE in (1.1) cannot be rewritten in a divergence form. The study is motivated by numerical solution of Hamilton–Jacob–Bellman equation which characterizes the value functions of stochastic control problems for applications in engineering, physics, economics, and finance [26].
The study of the second order elliptic PDE in nondivergence form requires the H2 regularity condition in order to have a strong solution. Usually, researchers use the convexity of the domain as an assumption, e.g. in [23, 25, 30], or assume a C2 smooth boundary ∂Ω to ensure the H2 regularity of the solution of the Poisson equation, e.g. in [6] or [12].
For many practical problems, the domain of interest does not have a C2 boundary nor is convex. One definitely needs to know the H2 regularity for more general domains to ensure the existence of a strong solution of the PDE in (1.1).
Our goal of this paper is to establish H2 regularity for more general domains. Among many existing generalizations of convexity is the concept called positive reach first introduced by Federer [11]. See [28] for a recent survey.
Definition 1.1
Let be a non-empty set. Let rK be the supremum of the number r such that every points in
has a unique projection in K. The set K is said to have a positive reach if rK > 0.
It is easy to see that a closed convex set is of positive reach with r = ∞. We shall explain later that a domain with C2 boundary has a positive reach. Figure 1 illustrates some non-convex planar sets with positive reach. As Figure 1 illustrates, sets of positive reach are much more general than convex sets.
Figure 1.
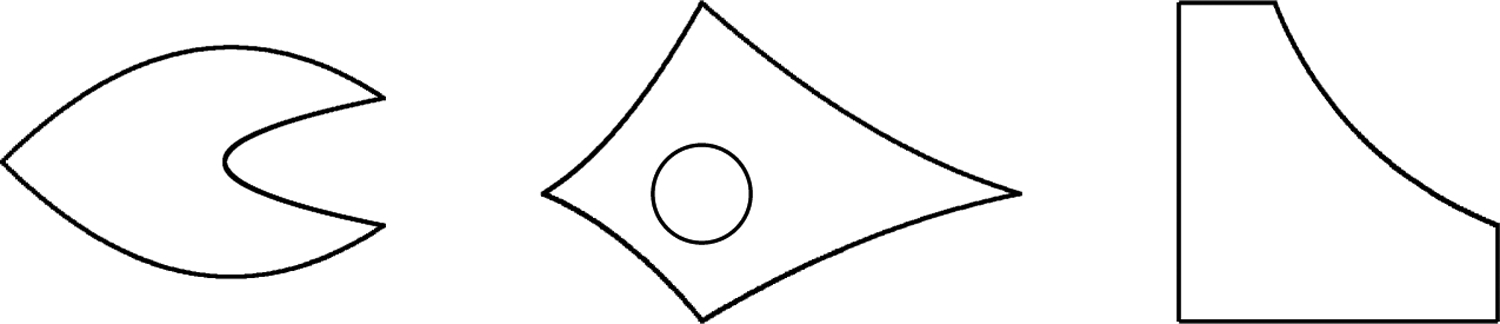
Domains (shaded) with positive reach
Next we introduce a new concept on domains of interest. Let B(0, ϵ) be the closed ball centering at 0 with radius ϵ > 0, and let Kc stand for the complement of the set K in . For any ϵ > 0, the set
| (1.3) |
is called an ϵ-erosion of K.
Definition 1.2
A set is said to have a uniformly positive reach r0 if there exists some ϵ0 > 0 such that for all ϵ ∈ [0, ϵ0], Eϵ(K) has a positive reach at least r0.
It is easy to check that any closed convex set has an uniformly positive reach. Indeed, any ϵ-erosion of a convex set is also a closed convex set. Also, a domain with C2 boundary has a uniformly positive reach. One can see that each of the three sets in Figure 1 has a uniformly positive reach.
Next let us give an example to show that a set K has a positive reach, but not a uniformly positive reach.
Example 1.3
Consider the closed set (on the left) in Figure 2. The set has a positive reach. However, at one of the boundary points, the center of the circle in red in Figure 2 violates the definition of the uniformly positive reach. As shown in Figure 2, the set Eϵ(K) in red is an ϵ-erosion of K. As ϵ → 0, the boundary of Eϵ(K) is getting close to the boundary of K. The reach of Eϵ(K) will go to 0. That is why K does not have a uniformly positive reach.
Figure 2.

The set K on the left (in-between the square and the circle) has a positive reach, but does not have uniformly positive reach. The graph (on right) shows the set K (in blue), its ϵ-erosion Eϵ(K) (in red), and a small circle (in red). As ϵ becomes smaller, the reach of Eϵ(K) gets smaller.
In addition, from the definition of the uniformly positive reach, we can see that if a bounded domain has a uniformly positive reach, then Ω is of positive reach as the ϵ-erosions of Ω converge to Ω. Thus, if a domain does not have a positive reach, it can not be of uniformly positive reach.
The main purpose of this paper is to establish the following
Theorem 1.4
Let be a bounded domain. Suppose the closure of Ω is of uniformly positive reach rΩ. For any f ∈ L2(Ω), let be the unique weak solution of the Dirichlet problem:
| (1.4) |
Then u ∈ H2(Ω) in the sense that
| (1.5) |
for a positive constant C0 dependent on rΩ, but independent of f and u.
We comment that the domain does not have to be a Lipschitz domain to have the H2 regularity based on Theorem 1.4. To see this, we can look at the domain in the middle graph of Figure 1 and image that at one of the four tips, the two boundary curves have the same tangent line, and hence the domain is not Lipschitz. By Theorem 1.4, this domain has the H2 regularity. Thus, a domain does not need to have a Lipschitz boundary in order to have the H2 regularity.
Next we explain that the assumption of positive reach in Theorem 1.4 is necessary. An example is the solution u = (1 − r2)r2/3 sin(2θ/3) of the Poisson equation (1.4) over a domain Ω = {(r, θ) : 0 < r < 1, 0 < θ < 2π/3}, where and θ = arctan(y/x). It is easy to see that u is the solution of a Poisson equation with zero boundary and a uniform bounded function f = 4(2/3 + 1)r2/3 sin(2θ/3) ∈ L2(Ω) satisfying (1.4). One can check that u is not H2(Ω), see, e.g. [4]. Also see [14] for another example. It is easy to see that the closure of the domain above does not have a positive reach nor uniform positive reach. For the higher dimensional setting, when a bounded domain has a sharp inward cusp, e.g. the well-known Lebesgue spine, the Dirichlet problem has no classic solution. For example, when n = 3, consider the following domain
| (1.6) |
The inward cusp at (0, 0, 0) is called a Lebesgue spine. At this cusp, the domain does not have a positive reach, and the corresponding solution does not have H2 regularity. That is, in order to have H2 regularity, the domain must have a positive reach.
Nevertheless, with some extra assumptions on the domain, one indeed may replace the assumption of uniform positive reach by simply positive reach. In particular, we will see in the next section that the conclusion of Theorem 1.4 remains true if Ω is star-shaped and the closure of Ω is of positive reach.
Before proving Theorem 1.4, let us review some classic results on the H2 regularity property of the solution to Dirichlet problem of the Poisson equation first. In [15], the concept of domain with a cusp was introduced which is called turning points in [13]. An example from [13] was shown in Figure 3.
Figure 3.

Domain with a turning point [13]
The following result was established in [13]. See also some similar result in [15].
Theorem 1.5
Let f ∈ L2(Ω). Then there exists a unique satisfying (1.4) provided
| (1.7) |
with the assumption that 0 is a turning point, where ϕ1, ϕ2 are indicated in Figure 3.
As explained in [13], when ϕ1(x) ≡ 0 and ϕ2(x) = xα with α > 1, the sufficient condition in (1.7) is satisfied. However, when ϕ1(x) ≡ 0 and ϕ2(x) = x2/4, the sufficient condition (1.7) will not be fulfilled. Nevertheless, we can see that a domain with such a turning point as in Figure 3 has a uniformly positive reach and hence, our Theorem 1.4 can be used to establish the H2 regularity even ϕ2(x) = x2/4. That is, the condition in Theorem 1.4 is more general.
We next recall the following
Theorem 1.6 (Adolfsson, 1992 [1])
Suppose that Ω is a uniformly Lipschitz domain in of finite width. If Ω satisfies an outer ball condition of uniform radius, then the unique solution of the Dirichlet problem (1.4) has all its second order derivatives in L2(Ω), i.e., u ∈ H2(Ω).
The outer ball condition mentioned above is that at each point p on ∂Ω there exists an exterior ball B, i.e. B ⊂ Ωc of radius r touch at p, i.e. tangent to ∂Ω, where Ωc stands for the complement of Ω. When Ω is bounded, Ω is of finite width. When Ω is a bounded Lipschitz domain, it is a uniformly Lipschitz domain. These explain all the notational questions in Theorem 1.6. It is easy to see that any convex domain satisfies the uniform outer ball condition. Also, a convex domain is a Lipschitz domain [2]. Thus, Theorem 1.6 is applicable to convex domains. Recently, the Lipschitz domains satisfying a uniform exterior ball condition is called semi-convex domains (e.g. [24] and [9]).
We will show that when is of positive reach, Ω satisfies an outer ball condition for a uniform radius as explained in Lemma 2.1 (see the following section). On the other hand, if Ω satisfies a uniform outer ball condition, may not have a uniformly positive reach. See the domain in the left panel of Figure 2. (Note that the domain is not Lipschitz. Both Theorems 1.4 and 1.6 fail to establish the regularity for such a domain.) These show that our condition and the one in Theorem 1.6 are two different conditions to ensure the H2 regularity of the solution to Dirichlet problem.
Let us also note that if a set is of positive reach in , then it is also of positive reach in for m < n. This is not the case for the outer ball condition: indeed, any planar set satisfies a uniform outer ball condition of any radius in . Let us also emphasize that the main difference between Theorems 1.4 and 1.6 is that in Theorem 1.4, the domain Ω does not need to have a Lipschitz boundary.
Because a set Ω satisfies an outer ball condition for a uniform radius whenever is of positive reach (Lemma 2.1) we may simply replace the outer ball condition in Theorem 1.6 by the positive reach condition, and restate the result as a part of Theorem 1.7. The other part of Theorem 1.7 is a precise relation of the constant C0 in (1.5) with the positive reach rΩ of .
Theorem 1.7
Suppose that is a bounded domain with Lipschitz boundary. Suppose that the closure of Ω has a positive reach rΩ > 0. For any f ∈ L2(Ω), let be the unique weak solution of the Dirichlet problem (1.4). Then u ∈ H2(Ω) in the sense of (1.5). Moreover, the constant in (1.5) depends only on the positive reach rΩ.
In Section 2, we first use the concept of star-shaped domain to establish a proof of H2 regularity over a star-shaped domain which has a positive reach. See Theorem 2.7. Then, we devote our effort to proving Theorem 1.4. In Section 3.1, we address two applications of the new H2 regularity condition.
2. Proofs
We shall prove Theorem 1.7 before proving Theorem 1.4. Let us begin with some properties of sets with positive reach.
Lemma 2.1
Let Ω be a bounded domain in . If is of positive reach rΩ, then the following are true:
- For every 0 < r < rΩ, and every with , if x is the projection of y onto , then, the closed ball B(z, r) centering at z with radius r intersects precisely at x, where
(2.1) For every 0 < r < rΩ, every point on the boundary of Ω is touchable by a closed ball of radius r from outside, that is, for every 0 < r < rΩ and every x0 ∈ ∂Ω, there exists a such that the closed ball B(w, r) intersects precisely at x0.
Proof
We prove (i) by contradiction. Suppose (i) is false, then there exist a with 0 < dist(y, Ω) < rΩ, and an with ‖y − x‖ = dist(y, Ω), and 0 < r < rΩ such that the closed ball B(z, r) does not intersect uniquely at x with z in (2.1). Since is of positive reach, we must have
| (2.2) |
This implies that
We have
by applying (6) of Theorem 4.8 in Federer [11]. This contradicts to the assumption r < rΩ. Hence, (i) is proved.
Now, we use (i) to prove (ii). Because x0 is on the boundary of Ω, there exists N0 > 0 such that for every integer m ≥ N0, we can choose a point ym outside so that ‖ym − x0‖ < r/m. Let xm be the projection of ym onto . Let
By i), the closed ball B(wm, r) intersects precisely at xm. Since
for all m ≥ N0, the sequence {wm} is bounded in . Hence it contains a subsequence that converges to some . Clearly, we have
Since r < rΩ, the closed ball B(w0, r) intersects precisely at x0. This finishes the proof of (ii). □
We are now ready to establish the first part of Theorem 1.7. By using part (ii) of Lemma 2.1 above, we can see the positive reach rΩ implies the outer ball condition of uniform radius rΩ in Theorem 1.6. Thus, the first part of Theorem 1.7 is established by Theorem 1.6. We shall continue the investigation of the second part of Theorem 1.7 in the next. The proof is the same as the one for Theorem 1.4. We leave it to when we prove Theorem 1.4.
We now investigate how large the constant C0 in (1.5) is. We shall connect it to the positive reach rΩ. To do so, we shall use the following standard formula [13, Theorem 3.1.1.1]: Suppose that over a bounded domain with C1, 1 smooth boundary. Then we have
| (2.3) |
where is a symmetric matrix of size (n − 1) × (n − 1), tr is the trace operator of the bilinear form: , and T = [τ1, …, τn−1] and n are the tangent vectors and the outward normal direction vector of ∂Ω, respectively. Letting v = ∇u in (2.3) leads to
| (2.4) |
See a detailed proof of (2.4) in [13] or [5]. When the underlying domain Ω is convex, we have and . Thus we have C0 = 1 in (1.5). We can also use the so-called Miranda–Talenti estimate. In [22] and [27] the following equality was calculated: for any u ∈ H2(Ω),
| (2.5) |
where H(x) is the mean curvature of ∂Ω which is C2 boundary. In the setting of the convex domain Ω, H(x) is non-positive, we use (2.5) and the following identity:
| (2.6) |
to conclude the inequality in (1.5) with C0 ≡ 1. When the domain Ω has a positive reach rΩ, the mean curvature H(x) at each x can be bounded above by (n−1)/rΩ. This is quantitatively established in the following lemma.
Lemma 2.2
Suppose that Ω is a bounded open set with C1, 1 boundary ∂Ω. Suppose that for a fixed real number c > 0, e.g. c = (n − 1)/r over ∂Ω. Then the inequality in (1.5) holds for a constant C0 = (1 + (cK)2C2)/(1 – cKϵ), where C is a constant in the Poincaré inequality (2.7) and K is the constant in the trace inequality in (2.10).
Proof
Using Poincaré inequality, we have
| (2.7) |
for a positive constant C dependent only on the size of Ω. As u is a weak solution, we have
We use Cauchy–Schwarz inequality to get
That is, we have
| (2.8) |
and
| (2.9) |
In addition, we need the standard Sobolev trace inequality:
| (2.10) |
for any ϵ ∈ (0, 1), where K > 0 is a constant independent of u. The second term in (2.4) can be estimated by
We then use the trace inequality to the right-hand side of the above inequality to get
| (2.11) |
Indeed, we first consider an open set Vϵ ⊂ Ω with C1, 1 boundary. Using the interior regularity of u, we have the above inequality with Ω replaced by V. Then we let Vϵ → Ω to have (2.11).
Returning to (2.4), we have
By choosing ϵ = 1/(cK) < 1 and using (2.9),
The desired inequality (1.5) follows with C0 = (1 + (cK)2C2)/(1 – cKϵ).□
Let us make a remark that the result in the lemma above is not new. A similar result can be found in [18]. That is, when the domain with boundary ∂Ω consists of piecewise C2 smooth surfaces with curvature bounded below by a constant c > 0, one has the property (1.5). See [18, Lemma 8.1]. When the domain Ω has a positive reach, we can estimate c in terms of the reach r = reach(Ω) as in the following lemma.
Lemma 2.3
Let Ω be a bounded set in with a C1, 1 boundary. Suppose that the closure of Ω has a positive reach. If reach(Ω) ≥ r, then .
Proof
Let Γ be the boundary of Ω. For any point P on Γ, we choose a coordinate system {y1, y2, …, yn} with origin at P such that the hyperplane yn = 0 is tangent to Γ at P, and choose a rectangular box
and a function ϕ of class C1, 1 in the closure of
such that for every (y1, y2, …, yn−1) ∈ V′, and
Then,
Note that by Lemma 2.1, for any δ < r, there exists a ball of radius δ which intersects Ω only at the point P. Because the hyperplane yn = 0 is the tangent plane of Ω at the origin P, this ball must lie entirely above the tangent hyperplane yn = 0. Consequently, for |h| < min{a1, δ}, we have . Since ϕ(0, …, 0) = 0 and , we obtain
Similarly, we have for all 2 ≤ j ≤ n − 1. Because δ < r is arbitrary, the statement of the lemma follows. □
Combining the results above, we obtain the following:
Corollary 2.4
Let Ω be a bounded set in with a C1, 1 boundary. Suppose that has a positive reach(Ω) ≥ r. Then
| (2.12) |
for a constant C1 = (1 + ((n − 1)K/r)2C2)/(1 – ϵ(n – 1)K/r), where C is the Poincaré constant in (2.7) and K is the constant in the trace inequality in (2.10).
Next we extend Theorem 1.7 to a more general setting. In particular, we need to remove the assumption of C1, 1 boundary in Corollary 2.4. Let us start with a well-known concept of star-shaped domains [4]. See Figure 4 for such an example.
Figure 4.
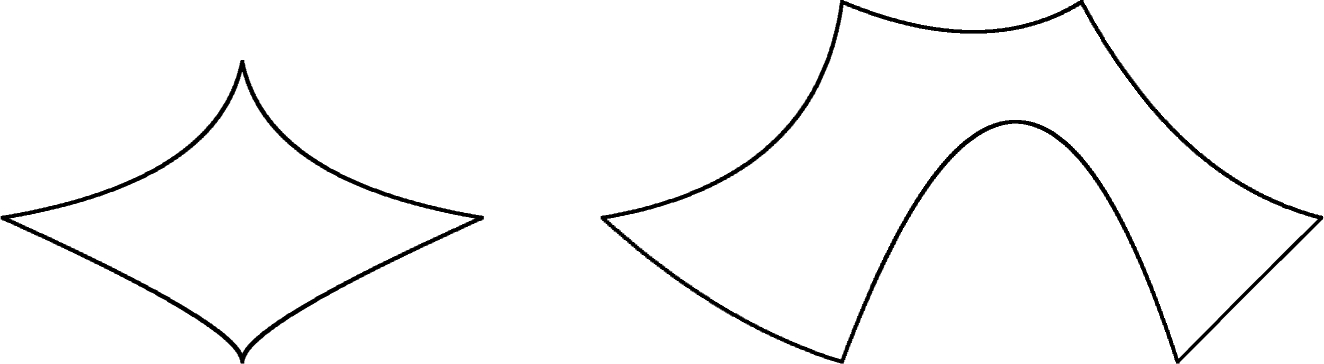
Left: A star-shaped domain which is not Lipschitz at one corner (the bottom one). Right: A multi-star shaped domain with uniform positive reach
Definition 2.5
Let be a bounded domain. We say Ω is a star-shaped domain if there exists a point, say x0 ∈ Ω such that the line segment from x0 to any point x ∈ Ω is completely contained in Ω. x0 is called the center of Ω.
Clearly, we can extend the definition of star-shaped domains to the following way.
Definition 2.6
Let be a bounded domain. We say Ω is a multiple-star-shaped domain if there exist finitely many points, say x1, …, xk ∈ Ω such that for any point x ∈ ∂Ω, there exists an index i ∈ {1, …, k} such that the line segment [x, xi] is completely contained in Ω. x1, …, xk are called the centers of Ω.
Typically, a bounded domain with Lipschitz boundary is a multiple-star-shaped domain. A multiple-star-shaped domain may have a uniformly positive reach. See Figure 4 for an example.
We now state the H2 regularity of the solution to the Dirichlet problem of Poisson equations over a general domain.
Theorem 2.7
Suppose that is a bounded a star-shaped domain. Suppose that the closure of Ω is of positive reach r. For any f ∈ L2(Ω), let be the unique weak solution of the Dirichlet problem (1.4). Then u ∈ H2(Ω) satisfies (1.5) with constant C0 dependent on r.
To prove the above theorem, we need a few preparatory results. The lemma below shows that for any ϵ > 0 there is an open subset Uϵ ⊃ Ω such that Uϵ has a C1, 1 smooth boundary and dist(Uϵ, Ω) < ϵ.
Lemma 2.8
If is of positive reach r0 = reach(Ω), then for any 0 < ϵ < r0, the boundary of Ωϵ := Ω + B(0, ϵ) containing Ω is of C1, 1. Furthermore, Ωϵ has a positive reach ≥ r0 − ϵ.
Proof
Because the boundary B(0, ϵ) is of C∞, it is known (see [16]) that the boundary of Ωϵ is of C1, 1 if Ω is convex. We now extend the result to the setting that Ω is a domain whose closure has a positive reach.
For any x ∈ ∂Ωϵ, there exists y ∈ ∂Ω such that ‖x − y‖ = dist(x, Ω) = ϵ since Ω is of positive reach and ϵ < r0. Also, for any ϵ < r < r0, there exists a closed ball of radius r that intersects Ω only at y. Denote this ball by B(c, r). Then the ball B(c, r − ϵ) intersects Ωϵ only at x.
On the other hand, the closed ball B(y, ϵ) is contained in and intersect ∂Ωϵ only at x. Hence, ∂Ωϵ intersects two tangent balls B(y, ϵ) and B(c, r − ϵ) at x. Without loss of generality, we may assume x = 0 and the tangent hyperplane at 0 is xn = 0, where x = (x1, …, xn). The boundary of Ωϵ can be expressed as xn = ϕ(x1, …, xn−1) by the implicit function theorem. Note that ϕ(0, 0, …, 0) = 0. Letting be the first part of x ∈ ∂Ω, for , we have
| (2.13) |
We claim that ϕ is differentiable at 0. Indeed, we have
| (2.14) |
and
| (2.15) |
by using the inequalities in (2.13). It follows that ϕ is differentiable at 0 and ∇ϕ(0) = 0. Similar analysis for all point in Ω implies that Ω has a C1 boundary.
We next claim that the gradient of ϕ is bounded from above and below. Using the notations above, we have
| (2.16) |
and similarly,
| (2.17) |
Therefore, for all , we have
| (2.18) |
We now apply a known result Lemma 2.9 to finish the proof of C1, 1.
Finally, we show Ω is of reach r − ϵ. For any point , if dist(q, Ωϵ) < r − ϵ, we know dist(q, Ω) = δ < r. Since the reach of Ω is at least r, there exists a closed ball centering at q with radius δ > 0 which intersects Ω only at one point p, say. Now the closed ball centered at q with radius δ − ϵ intersects Ωϵ only at one point, namely the point p + ϵ(q − p)/δ. Therefore, Ωϵ is of reach δ − ϵ. This holds for all δ < r. Thus, Ωϵ has a reach of δ − ϵ. In general, r − ϵ is the best one can hope for. Indeed, if Ω is the complement of an open ball with radius r which has a positive reach r, then Ωϵ is the complement of an open ball with radius r − ϵ which has a reach r − ϵ. □
Lemma 2.9
Assume that the function f is bounded on a neighborhood of x0 ∈ ∂Ω. f is of class C1, 1 at x0 if and only if there exists a neighborhood U of x0 such that the central difference
| (2.19) |
is bounded on U for all h ∈ (−δ, δ) for a fixed δ > 0 and which is the unit sphere in .
Proof
See [29, Corollary 2.1] for a proof. □
Next we show that if Ω is a star-shaped domain whose closure is of positive reach, then for any ϵ > 0, there exists an open set Uϵ ⊂ Ω with C1, 1 boundary with dist(Ω, Uϵ) ≤ ϵ.
Lemma 2.10
Let Ω be a bounded domain with a positive reach in . Suppose that Ω is a star-shaped domain. Then, for each ϵ > 0, there exists an open set U with C1, 1 smooth boundary such that Uϵ ⊂ Ω and dist(Ω, Uϵ) ≤ ϵ.
Proof
Let x0 ∈ Ω be the center of the star-shaped domain Ω. By Lemma 2.8, we have Ωϵ containing Ω with C1, 1 boundary for any ϵ < r, where r stands for the reach of Ω. Letting ∂Ωϵ be the boundary of Ωϵ, we define
| (2.20) |
We claim that Uϵ ⊂ Ω is a domain with C1, 1 boundary. Indeed, at the center x0 ∈ Ω, we fix a spherical coordinate system. For any point x ∈ ∂Ωϵ, we define a function ϕ of the angle of the ray from x0 to x with value to be the length ‖x – x0‖. Then ϕ is a function describing the boundary of Ωϵ. Since Ωϵ has a C1, 1 boundary by Lemma 2.8, ϕ is a C1, 1 function. Next we define a new function ψ over the same spherical coordinate system as ϕ by
which is the function which can describe the boundary of Uϵ. Clearly, ψ(x) is a C1, 1 function for x ∈ Uϵ and hence, Uϵ has a C1, 1 boundary. □
We are now ready to prove Theorem 2.7 under an assumption that Ω is a star-shaped domain.
Proof of Theorem 2.7
We use Lemma 2.10 to select a sequence of sets Uϵ ⊂ Ω with dist(Ω, Uϵ) ≤ ϵ with ϵ → 0.
For a function f ∈ L2(Ω). Then, we define to be the weak solution of
| (2.21) |
We claim that uϵ ∈ H2(Uϵ). Indeed, using Lemma 2.10 again, we take an open set Vη ⊂ Uϵ. The interior regularity of [10] and the C1, 1 boundary of Vη allows us to have
| (2.22) |
by using (2.4), where T and n stand for the tangential and normal direction of ∂Vη. As the above equation in (2.22) holds for all Vη, hence it holds for Uϵ. Using the boundary condition uϵ|∂Ω = 0, we have ∇Tuϵ = 0 and
| (2.23) |
Since the domain Uϵ has C1, 1 boundary and a positive reach, we use Corollary 2.4, i.e. (2.12) to have
with C1 ≥ 1 being a positive constant dependent on the reach.
Let us extend uϵ by zero outside Uϵ to Ω, also denote it by uϵ. Then uϵ belongs to for all ϵ > 0 sufficiently small and
| (2.24) |
for another positive constant C2. By Rellich’s theorem, there is and a subsequence, without loss of generality, we may assume that strongly in L2(Ω), strongly in H1(Ω), and weakly in H2(Ω).
We now claim that . Since , for any , we have
| (2.25) |
Since ϕ is compactly supported in Ω, Lemma 2.10 shows that there is ϵ > 0 such that supp(ϕ) ⊂ Uϵ for all ϵ > 0 sufficiently small. Since solves the Poisson equation over Uϵ and in weakly, we get
| (2.26) |
by using (2.25). It follows that since (2.26) holds for all . Then because of the zero boundary condition for both u and . Therefore, u ∈ H2(Ω).
Remark 2.11
Based on the proof above, we can remove the C1, 1 assumption in Corollary 2.4 to have (2.12) when the underlying domain Ω is a star-shaped domain.
Finally let us proceed to establish Theorem 1.4.
Proof of Theorem 1.4
The proof of Theorem 1.4 is similar to that of Theorem 2.7 in the following senses. Indeed, instead of defining Uϵ ⊂ Ω by using the formula in (2.20), we let Eϵ(Ω) = (Ωc + B(0, ϵ))c ⊂ Ω be an ϵ-erosion of Ω and
| (2.27) |
By the assumption of Theorem 1.4, i.e. the uniformly positive reach, we know the domain E2ϵ(Ω) has a positive reach r0 for sufficiently small ϵ. Then by Lemma 2.8, Uϵ has C1, 1 boundary. Then the rest of the proof is the same as that of Theorem 2.7. These finish the proof. □
3. Some Applications
In this section, we apply the new regularity conditions to two examples of PDE and establish the H2 regularity.
3.1. The Strong Solution to Second Order PDE in Non-divergence Form
In this section we study the solution to the second order PDE in non-divergence form in (1.1). For simplicity, we let
| (3.1) |
be the differential operator associated with the model problem (1.1). Next we assume that
Definition 3.1
The PDE coefficients aij (i, j = 1, …, n) satisfy the Cordés condition [23]:
| (3.2) |
for a positive number ϵ ∈ (0, 1].
Following the studies in [25, 26], and [23], we assume that
| (3.3) |
For example, the ellipticity of the PDE in (1.1) will imply (3.3) when n = 2. The following result is known.
Lemma 3.2 ([23, 25])
Suppose that the PDE coefficients aij, (i, j = 1, …, n) satisfy the Cordés condition. Then
| (3.4) |
With this preparation, we are able to prove one of our main results in this section.
Theorem 3.3
Suppose that Ω has a uniformly positive reach. If the PDE coefficients aij satisfy the Cordés condition with an close to 1 such that , then there exists a unique strong solution u ∈ H2(Ω) to the PDE in (1.1), where C0 appears in Theorem 1.4, i.e. in (1.5).
Proof
We mainly follow the approach in [25]. First of all, it is easy to see that is a norm on H. By Theorem 1.4, implies
by using (1.5). Thus, u is a linear polynomial over Ω. The zero boundary condition of u implies u ≡ 0. The other norming properties can be established in a standard fashion.
Next let us consider an equivalent PDE: find satisfying the following:
| (3.5) |
Write and define a bilinear form [25].
| (3.6) |
We now claim that the bilinear form A(u, v) is continuous in the sense that there is a positive constant β > 0 such that
| (3.7) |
for all u, v ∈ H and coercive, i.e.
| (3.8) |
for ϵ ∈ (0, 1) large enough, where α > 0 is a constant independent of u. Indeed, we use Lemma 3.2 to have
by Cauchy–Schwarz inequality and the inequality in (2.12). If ϵ ∈ (0, 1) is large enough such that , we have (3.7) and (3.8) with and .
Now Lax–Milgram theorem implies that there exists a unique weak solution in H satisfying
That is, u is a weak solution in H satisfying (3.5). Since u ∈ H2(Ω), u is a strong solution. This finishes the proof of Theorem 3.3. □
3.2. The Regularity of the Solution to the Helmholtz Problem
We are interested in the regularity of the solution of the following Helmholtz problem:
| (3.9) |
where Ω is a bounded domain with Lipschitz boundary, denotes the imaginary unit, n is the normal to ∂Ω, and k ≥ 1 is the wave number. This Helmholtz problem arises from many application areas: acoustic scattering, electromagnetic fields, etc. In the literature, the solution to Helmholtz problem (3.9) will be H2 if Ω is convex or Ω has a C2 smooth boundary (see [8]). We now show that the unique solution u is of H2 regularity when Ω has a uniform positive reach.
Theorem 3.4
Let be a bounded domain. Suppose the closure of Ω is of uniformly positive reach rΩ > 0. For any f ∈ L2(Ω), let be the unique weak solution of the Helmholtz problem (3.9). Then u ∈ H2(Ω) satisfying (1.5) for a positive constant C0 dependent on rΩ, but independent of f and u.
Proof
The ideas for this proof are similar to that of Theorem 1.4. We first prove that the solution u satisfies (1.5) if u ∈ H2(Ω). Then we find a sequence of subdomains Uϵ ⊂ Ω which has C1, 1 boundary with uniform positive reach rΩ/2 and solve uϵ ∈ H2(Ωϵ) satisfying (1.5) with a constant C0 dependent on rΩ/2. Finally, we use Rellich theorem to find a limit u ∈ H2(Ω) of uϵ strongly in L2(Ω) and strong in H1(Ω) and weakly in H2(Ω).
The major proof is to show the boundedness of u in H2(Ω) semi-norm. Let us start with the the following identity [13]: when Ω has C1, 1 boundary and , u satisfies
| (3.10) |
for n ≥ 2, where tr is the standard trace operator, is a bilinear form associated with the curvature of boundary surface Γ of Ω as defined in [13], and n is the unit outward normal direction of Γ = ∂Ω and T is the unit tangential direction of Γ.
Since u is the solution of (3.9), we use the boundary condition to get
| (3.11) |
Next we split Γ into three portions according the symmetric Hessian matrix , i.e. Γ = Γp ∪ Γn ∪ Γi such that for x ∈ Γp, for x ∈ Γn and is indefinite when x ∈ Γi. The last term in (3.10) can be rewritten as
When the underlying domain Ω has a positive reach rΩ, we have over the boundary Γ by Lemma 2.3. Also, over Γp, we . Thus,
Over Γi, we rewrite with symmetric nonnegative definite matrices and . Thus,
By the same argument as the proof of Lemma 2.3, we have and hence, . That is, we also have
We summarize the discussion above to have
for some ϵ > 0, where c = (n − 1)/rΩ for convenience. Choosing ϵKc <1/2, we obtain
| (3.12) |
Next we use [19, Theorem 1] to have
| (3.13) |
for a positive constant C independent of f and k. Therefore, in the semi-norm of , |u|2, Ω ≤ C(1 + k)‖f‖. We have thus established Theorem 3.4. □
4. Remarks
We present a few remarks on domains with uniformly positive reach. Let us start with the following example
Remark 4.1
There is a bounded domain Ω which satisfies the uniform outer ball condition, but does not have a positive reach. See Figure 5.
Figure 5.

The solid domain has a uniform outer ball condition while does not have a positive reach.
However, it is not a Lipschitz boundary and hence, Theorem 1.6 can not be applied.
Remark 4.2
It is known that a domain with C2 boundary, Ω has a positive reach by [17, Lemma 1.2.5]. Also, in [17], there is an example, a C1, α domain does not have a positive reach for some α > 0.
Remark 4.3
Let us give a sufficient condition to ensure that the uniform outer ball condition implies the condition of positive reach.
Lemma 4.4
If a set Ω satisfies a uniform outer ball condition with radius r0 and Ω is a C1 boundary, then it is of positive reach r0.
Proof
For any with , let be a projection of p on ∂Ω. Because has an out-ball of radius r0 at q, let B(w, r0) be the ball touched at q. Then p must lie on the line segment between w and q. This is because the both vectors and orthogonal to the tangent hyperplane of Ω at q and . Now B(p, ‖p – q‖) ⊂ B(w, r0), B(p, ‖p – q‖) can only touch at q. Hence, p has a unique projection. That is, the reach of is greater or equal to r0. □
Remark 4.5
It is known that if Ω has a C2 boundary, then Ω has a positive reach by [17, Lemma 1.2.5]. We now show that Ω has a uniformly positive reach.
Lemma 4.6
Suppose that a bounded domain Ω has a C2 boundary. Then Ω has a uniformly positive reach.
Proof
By [17, Lemma 1.2.5], Ω has a positive reach. In fact, according to the proof, there exists an open set V containing the boundary ∂Ω such that any point v ∈ V has a unique projection on ∂Ω. That is, both and have a positive reach.
Next we claim that if is of positive reach r0 and is of positive reach r1, then for any ε < r1, the ϵ-erosion has a positive reach ≥ r0 + ε. Indeed, for any x ∈ ∂Ωε, by the definition of Ωε, there exists p ∈ ∂Ω such that ‖x − p‖ = dist(x, ∂Ω) = ε. Because Ω has a tangent hyperplane at p, we have , where is the unit inward normal vector of at p. On the other hand, for any p ∈ ∂Ω, the point is clearly at a distance ε away from Ωc. Because is of positive reach r1 > ε, the distance between and any point q ∈ ∂Ω\{p} is larger than ε, thus we must have . Therefore, we have the following characterization of ∂Ωε:
For any w satisfying . If , we let p be a point on that is closest to w. Because dist(w, ∂Ω) ≤ ε, by the assumption that is of positive reach r1 > ε, the point p is uniquely determined by w. We show that is the unique point on that is closest to p. Indeed, suppose satisfies ‖u – p‖ ≤ ε. Since is a point on ∂Ω that is closest to u. This means that . Hence, is the unique point on that is closest to p. In particular, this implies that the closed ball centering at p with radius ε intersects only at the point x. Since w lies between p and x, the closed ball centering at w with radius ‖x – w‖ intersects only at the point x. Thus, x is the unique point in that is closest to w.
If . Let x be a point in that is closest to w. We show that x is uniquely determined by w. Indeed, let p be the intersection of the line segment xw with ∂Ω. Because for any ,
x is a point on that is closest to p. By the characterization proved above, we have . Consequently, . Since
by the assumption that is of positive reach r0, the point p is uniquely determined by w. Hence, is also uniquely determined by w. Therefore, is of positive reach ≥ r0+ε and the claim is prove. □
Thus, the solution to the Dirichlet problem of the Poisson equation is in H2(Ω) with constant C0 in (1.5) dependent on the positive reach. When the boundary is C2, we can find the positive reach rΩ and hence we know how large the regularity constant C0 in (1.5).
Acknowledgments
The first author is partially supported by Simons collaboration (Grant No. 246211) and the National Institutes of Health (Grant No. P20GM104420), the second author is partially supported by Simons collaboration (Grant No. 280646) and the National Science Foundation under the (Grant No. DMS 1521537)
Contributor Information
Fu Chang GAO, Department of Mathematics, University of Idaho, Moscow, ID 83844.
Ming Jun LAI, Department of Mathematics, University of Georgia, Athens, GA 30602.
References
- [1].Adolfsson V: L2 integrability of second order derivatives for Poisson equations in nonsmooth domain. Math. Scan, 70, 146–160 (1992) [Google Scholar]
- [2].Agranovich MS: Sobolev Spaces, Their Generalizations and Elliptic Problems in Smooth and Lipschitz Domains, Springer Monographs in Mathematics. Springer-Verlag, 2015 [Google Scholar]
- [3].Awanou G, Lai MJ, Wenston P: The multivariate spline method for numerical solution of partial differential equations, in: Wavelets and Splines, Nashboro Press, Brentwood, 24–74 (2006) [Google Scholar]
- [4].Brenner SC, Scott LR: The Mathematical Theory of Finite Element Methods, Springer-Verlag, New York, 1994 [Google Scholar]
- [5].Caccioppoli R: Limitazioni integrali per le soluzioni di unequazione linear ellittica a derivate parziali. Giornale di Bataglini, 80, 186–212 (1950–51) [Google Scholar]
- [6].Calderón AP, Zygmund A: On the existence of certain singular integrals. Acta Math, 88, 85–139 (1952) [Google Scholar]
- [7].Cockreham J, Gao F: Metric entropy of classes of sets with positive reach. Constructive Approximation, 47, 357–371 (2018) [Google Scholar]
- [8].Cummings P, Feng XB: Shape regularity coefficient estimates for complex-valued acoustic and elastic Helmholtz equations. Math. Models Methods in Applied Sciences, 16, 139–160 (2006) [Google Scholar]
- [9].Duong X, Hofmann S, Mitrea D, et al. : Hardy spaces and regularity for the inhomogeneous Dirichlet and Neumann problems. Rev. Mat. Iberoam, 29, 183–236 (2013) [Google Scholar]
- [10].Evans L: Partial Differential Equations, American Math. Society, Providence, 1998
- [11].Federer H: Curvature measures. Trans. Am. Math. Soc, 93, 418–491 (1959) [Google Scholar]
- [12].Gilbarg D, Trudinger NS: Elliptic Partial Differential Equations of Second Order. Springer-Verlag, Berlin, 1998 [Google Scholar]
- [13].Grisvard P: Elliptic Problems in Nonsmooth Domains, Pitman, Boston, 1985 [Google Scholar]
- [14].Hu X, Han D, Lai MJ: Bivariate Splines of Various Degrees for Numerical Solution of PDE. SIAM Journal of Scientific Computing, 29, 1338–1354 (2007) [Google Scholar]
- [15].Khelif A: Problèmes aux limites pour le Laplacien dans un domaine à points cuspides. C.R.A.S. Paris, 287, 1113–1116 (1978) [Google Scholar]
- [16].Krantz SG, Parks HR: On the vector sum of two convex sets in space. Canad. J. Math, 43, 347–355 (1991) [Google Scholar]
- [17].Krantz SG, Parks HR: Geometry of Domains in Space, Springer-Verlag, 1999 [Google Scholar]
- [18].Ladyzhenskaya OA, Ural’tseva NN: Linear and Quasi-linear Elliptic Equations, Academic Press, New York, 1968 [Google Scholar]
- [19].Lai MJ, Mersmann C: Bivariate splines for numerical solution of Helmholtz equation with large wave number, submitted, 2019
- [20].Lai MJ, Schumaker LL: Spline Functions over Triangulations, Cambridge University Press, 2007 [Google Scholar]
- [21].Lai MJ, Wang CM: A bivariate spline method for 2nd order elliptic equations in non-divergence form. Journal of Scientific Computing, 803–829 (2018) [Google Scholar]
- [22].Miranda C: Alcune limitazioni integrali per le soluzioni delle equazioni lineari ellittiches del secondo ordine. Ann. Mat. Pura Appl, 64, 353–384 (1963) [Google Scholar]
- [23].Maugeri A, Palagachev DK, Softova LG: Elliptic and Parabolic Equations with Discontinuous Coefficients, 109 Mathematical Research, Wiley-VCH Verlag, Berlin, 2000 [Google Scholar]
- [24].Mitrea D, Mitrea M, Yan L: Boundary value problems for the Laplacian in convex and semiconvex domains. Journal of Functional Analysis, 258, 2507–2585 (2010) [Google Scholar]
- [25].Smears I, Süli E: Discontinuous Galerking finite element approximation of nondivergence form elliptic equations with Cordés coefficients. SIAM J Numer. Anal, 51, 2088–2106 (2013) [Google Scholar]
- [26].Smears I, Süli E: Discontinuous Galerkin finite element approximation of Hamilton–Jacobi–Bellman equations with Cordes coefficients. SIAM J. Numer. Anal, 52, 993–1016 (2014) [Google Scholar]
- [27].Talenti G: Sopra una classse di equazioni ellittiche a coefficienti misurabili. Ann. Mat. Pura Appl, 69, 285–304 (1969) [Google Scholar]
- [28].Thäle C: 50 years sets with positive reach. Surveys in Mathematics and its Applications, 3, 123–165 (2008) [Google Scholar]
- [29].Torre DL, Rocca M: C1, 1 functions and optimality conditions. J. Concr. Appl. Math, 3, 41–54 (2005) [Google Scholar]
- [30].Wang C, Wang J: A primal-dual weak Galerkin finite element method for second order elliptic equations in non-divergence form. Math. Comp, 87, 515–545 (2018) [Google Scholar]