

Abstract
Deep network in network (DNIN) model is an efficient instance and an important extension of the convolutional neural network (CNN) consisting of alternating convolutional layers and pooling layers. In this model, a multilayer perceptron (MLP), a nonlinear function, is exploited to replace the linear filter for convolution. Increasing the depth of DNIN can also help improve classification accuracy while its formation becomes more difficult, learning time gets slower, and accuracy becomes saturated and then degrades. This paper presents a new deep residual network in network (DrNIN) model that represents a deeper model of DNIN. This model represents an interesting architecture for on-chip implementations on FPGAs. In fact, it can be applied to a variety of image recognition applications. This model has a homogeneous and multilength architecture with the hyperparameter “L” (“L” defines the model length). In this paper, we will apply the residual learning framework to DNIN and we will explicitly reformulate convolutional layers as residual learning functions to solve the vanishing gradient problem and facilitate and speed up the learning process. We will provide a comprehensive study showing that DrNIN models can gain accuracy from a significantly increased depth. On the CIFAR-10 dataset, we evaluate the proposed models with a depth of up to L = 5 DrMLPconv layers, 1.66x deeper than DNIN. The experimental results demonstrate the efficiency of the proposed method and its role in providing the model with a greater capacity to represent features and thus leading to better recognition performance.
1. Introduction
With the increase in the depth of the DNIN model, a problem of degrading the training precision has been unexpectedly exposed; the accuracy is saturated and then degrades rapidly. This degradation is not caused by overadjustment. It seemed clear that adding more Deep MLPconv (DMLPconv) layers to the DNIN models results in a higher training error, as reported in [1]. Generally, it has been shown that every fraction of the improved accuracy is costly in terms of the number of layers; hence, the formation of very deep networks poses problems such as reduced reuse of features during forward propagation, exploding/vanishing gradients making these networks very slow to form. However, several techniques are exploited to solve this problem. We note among them batch normalization [2], stochastic depth [3], well-designed initialization strategies [4, 5], better optimizers [6], skipping connections [7, 8], knowledge transfer [9, 10], layered training [11], normalized initialization [5, 12, 13], and residual blocks [14]. Experiments show that residual blocks [14, 15] were comparatively good or/and better than these various techniques and indicate that a deeper model should not produce higher training error than its shallower counterpart. The depth of the last residual deep networks [14] is evolved up to thousands of layers while improving their performance. They have had great success and reached the state of the art in several benchmarks. In this article, we address the degradation problem by introducing an efficient deep neural network architecture for computer vision, deep residual network in network, which takes its name from the deep network in the network article [1] in conjunction with the famous “deep residual learning for image recognition” [14]. The advantages of the architecture are experimentally verified on the CIFAR-10 classification challenges. The contributions of this work are as follows:
We propose a new residual architecture for the DMLPconv layers which allows to have DrNIN models with considerably improved performance
We propose a new way to use batch normalization and dropout in the DrNIN model in order to regularize and normalize them properly and avoid overfitting during training
We present a detailed experimental study of multilength deep model architectures that examines in depth several important aspects of DrMLPconv layers
Finally, we show that our proposed DrNIN architectures obtain interesting results on CIFAR-10 considerably improving the precision and training speed of DrNIN
The rest of this article is organized as follows: Section 2 presents an overview of related work. Section 3 bears the strategy. Experimental results are presented and discussed in Section 4. The advantages and limitations of DrNIN are presented in Section 5. The work is concluded in Section 6.
2. Related Works
Generally, various techniques are used to improve the performance of CNNs in terms of precision or parameters and computational complexity such as increasing the depth [14, 16–20], changing the filter type [1, 21, 22], increasing the width [19, 23], number of units of each layer and/or the number of feature maps (channels) [23, 24], modification of convolution parameters [25–29] or pooling [30–38], changing the activation function [1, 39, 40], and reducing the number of parameters and resources [1, 27, 41]. In CNN, the computation in the convolutional layer is based on the simple linear filter. However, changing the filter type is an important step to develop efficient CNNs. Using a nonlinear and more complex filter, such as an MLP filter, can generate more interesting results than using a simple linear filter [1, 21]. Several architectures were based on this principle such as [1, 21, 42]. NIN [21] adopts a nonlinear filter: the multilayer perceptron (MLP) with a rectified linear unit (ReLU) used as an activation function. In [1], DNIN model directly modifies NIN [21] in the sense of convolutional layer. It is represented in a three-layer stacking DMLPconv, which consists of two convolutional layers of size 3 × 3 and an eLU unit, used as an activation function instead of ReLU. By incorporating micronetwork, DNIN [1] also increases depth. The depth of DNIN [1] is the same as that of NIN [21] and shares the same number of convolutional kernels. DNIN [1] is illustrated in Figure 1. Our proposed model is closely related to DNIN [1] and is based on increasing depth. One of the main differences between CNNs and classical neural networks is the depth. AlexNet [27] contains eight learned layers (five convolutional layers and three fully connected ones) without taking into account the pooling layers. AlexNet [27] is the first architecture to use the rectified linear unit (ReLU) for the activation function in order to improve the rate of convergence by reducing the vanishing gradients problem. In VggNet [17], the depth ranges from 11 up to 19; VGG with 16 layers has a homogeneous and regular structure. GoogLeNet [24] introduced by Christian Szegedy et al. is a CNN with a depth of 22 layers. In ResNet [14], a residual block is proposed to facilitate the formation of very deep networks. The principle of these blocks rests upon including a link around each two convolution layers by adding the diverted original data and their results from the convolution function. This architecture is similar to GoogLeNet [24] in terms of the use of a global average pooling followed by the classification layer. In [39], the Maxout network delivers a solution to the vanishing gradients problem. Maxout units have been designed to facilitate and enhance dropout layers. They were originally intended to replace the ReLU functions. In [40], a Maxout network in Maxout network (MIM) model incorporating a maximum number of units that are stacked in a MIM block is proposed. The model [40] is more complex than the Maxout network [39]. In [43], quadratic units were given in order to improve the robustness. Furthermore, the authors in [44] succeeded in forming quadratic units. In [45], the authors proposed logarithmic activation functions. From these literatures, we considered already accomplished approaches and already carried out experiments in order to improve the original architecture of DNIN [1] in order to obtain a better precision where we can apply the residual learning framework to the different layers MLPconv, and reformulate convolutional layers as residual learning functions.
Figure 1.
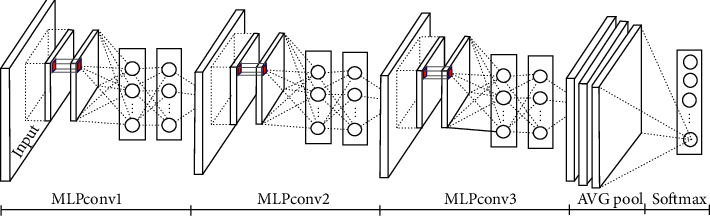
Deep network in network.
3. Proposed Model
3.1. Deep Residual MLPconv
Compared to the original DNIN architecture [1], a residual function block is applied inside the Deep MLPconv layers. The new layer is named Deep residual MLPconv (DrMLPconv). The residual block (Figure 2) with identity mapping is described in subsection 3.2 of [14] and its formula is represented as follows:
| (1) |
where xl+1 and xl are the input and output of the lth unit in the network, F is a residual function, and wl are parameters of the block. The residual network consists of the residual blocks stacked sequentially.
Figure 2.
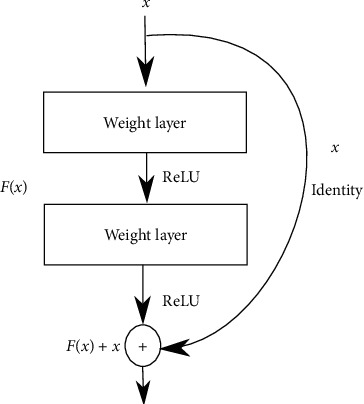
Residual learning: a building block.
Small filters of 3 × 3 size have been shown to be very effective in several works including [14, 17, 23]; they are almost exploited in works published after VggNet [17]. In our work, we do not plan to use filters larger than 3 × 3, compared to the original “Deep MLPconv” architecture [1]. Moreover, for all DrMLPconv layers, the numbers of convolutional kernels MLP-2 are the same. MLP-1 is equivalent to 96. Table 1 describes the number of kernels for DrMLPconv.
Table 1.
The numbers of kernels for all DrMLPconv.
| Layers | Conv 3 × 3 | MLP-1 | MLP-2 |
|---|---|---|---|
| Number | 192 | 160 | 192 |
The new base structure of the DrMLPconv is based on a residual block [14], a multilayer perception (with a depth of two layers) which is described as a complex nonlinear filter. Note that basic DMLPconv, as shown in Figure 3(a), consists of two convolution layers of size 3 × 3, MLP layers. These different layers are followed by an eLU activation. Figure 3 shows, respectively, a schematic example of basic DrMLPconv and DMLPconv [1].
Figure 3.
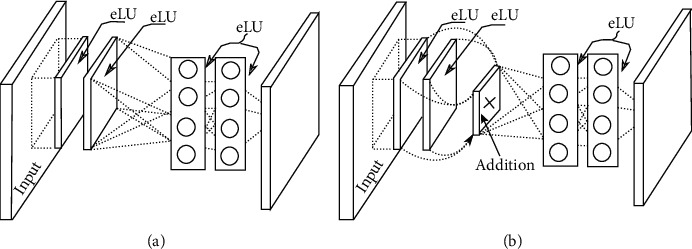
(a) A schematic example of DMLPconv layer, (b) a schematic example of “basic” DrMLPconv.
Let DrMLPconv (X) be the DrMLPconv layer, where X is a list of the layers used in the structure. For example, DrMLPconv (3, R) denotes the basic DrMLPconv layers with a residual block applied to two convolution layers of size 3 × 3. All the configurations of the DrMLPconv layer are equipped with the eLU nonlinearity [41]; DrMLPconv (3, R, BD) denotes the structure DrMLPconv (3, R) with the normalization and regularization layers (BD). The different structure of our DrMLPconv is shown in Table 2.
Table 2.
The configurations of DrMLPconv.
| Layer | DrMLPconv (X) | |
|---|---|---|
| (X) | DrMLPconv (3, R) | DrMLPconv (3, E, BD) |
| Conv-1 | 3 × 3 × 192/st. 1/pad 1/eLU | 3 × 3 × 192/st. 1/pad 1/eLU/BN |
| Conv-2 | 3 × 3 × 192/st. 1/pad 1/eLU | 3 × 3 × 192/st. 1/pad 1/eLU/BN |
| MLP-1 | 1 × 1 × 160/st. 1/pad 0/eLU | 1 × 1 × 160/st. 1/pad 0/eLU/BN |
| MLP-2 | 1 × 1 × 192/st. 1/pad 0/eLU | 1 × 1 × 192/st. 1/pad 0/eLU/BN |
3.2. The Structure of DrNIN
We describe our various configurations of DrNIN models for CIFAR-10. In these model configurations, the convolutional layers mostly have 3 × 3 filters and follow two simple design rules: first, the layers that participate in the residual block have the same size of output function feature map and the same number of filters; second, the exploitation of a pooling layer which is generally inserted periodically between a stack of L successive DrMLPconv layers of an architecture in order to preserve the temporal complexity by layer. In architectural design, pooling layers are another important concept that allows great gains in computing power due to the reduction in the spatial size of an image. We do a subsampling using the max pooling layers of size 3 × 3 which have a stride of 2 (3 × 3/ST.2). The network ends with a global average pooling layer and a softmax layer. The global average pooling layer filter size depends on the hyperparameter “L.” Table 3 summarizes the sizes of these global average pooling layers.
Table 3.
The filter size of the global average pooling layers.
| Hyperparameters | 3 | 4 | 5 |
|---|---|---|---|
| Global average pooling size | 8 × 8 | 4 × 4 | 2 × 2 |
Our configurations are captured in an RGB image of fixed size equal to 32 × 32. The image is passed through a layer stack that is built with variable and complex structures. Figure 4 illustrates an example of the DrNIN model composed of three DrMLPconv (3, R) layers.
Figure 4.
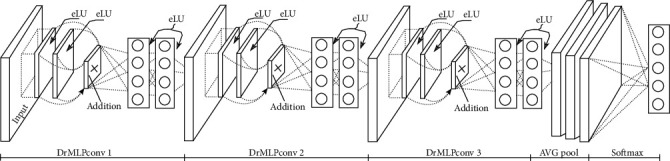
A DrNIN with 3 DrMLPconv (3, R).
The overall structure of DrNIN generally consists of the L layer DrMLPconv. Table 4 shows the overall structure of DrNIN for three different hyperparameters. In addition, it shows the output sizes after each layer used in the model.
Table 4.
The structure of DrNIN.
| Layer name | Output size | ||
|---|---|---|---|
| - | L = 3 | L = 4 | L = 5 |
| DrMLPconv-1 | 32 × 32 | 32 × 32 | 32 × 32 |
| Max-pool | 16 × 16 | 16 × 16 | 16 × 16 |
| DrMLPconv-2 | 16 × 16 | 16 × 16 | 16 × 16 |
| Max-pool | 8 × 8 | 8 × 8 | 8 × 8 |
| DrMLPconv-3 | 8 × 8 | 8 × 8 | 8 × 8 |
| Max-pool | — | 4 × 4 | 4 × 4 |
| DrMLPconv-4 | — | 4 × 4 | 4 × 4 |
| Max-pool | — | — | 2 × 2 |
| DrMLPconv-5 | — | — | 2 × 2 |
| Global average pooling | 1 × 1 | — | — |
3.2.1. Dropout and Batch Normalization in DrNIN
The use of regularization represents a solution to avoid overlearning. A batch normalization [2] is already applied for DrNIN in order to provide a regularization effect. This layer is localized after the convolutional layers, and before the nonlinearity. Using this layer makes DrNIN more resistant to bad initialization. Moreover, it eliminates the need for the use of dropout layer [46]. Dropout layer [46] is an extremely efficient regularization technique that complements the L1, L2 regularization methods which are used to monitor the ability of neural networks to prevent overlearning. They are widely exploited for the purpose of introducing regularization into deep neural networks and to prevent neural networks from overadjusting. The purpose of this technique is to randomly remove units or connections in order to prevent the units from adapting to them, which can improve the classification accuracy in many studies [1, 21, 42]. This technique proves that during training these layers ultimately improve generalization by randomly skipping a selectable percentage of their connections. When training, there are neurons that do not contribute to the propagation and do not participate in the backpropagation. At the time of the test, all neurons are used but their outputs are multiplied by the probability. Generally, the probability of 0.5 is the most used. The downside of this layer is that it roughly doubles the number of iterations needed to converge. Using this layer with a probability of 0.5 reduces the error rate to almost 2% for almost all configurations. Note that the dropout layers [46] are added between the DrMLPconv layers and after the pooling layers.
3.2.2. The Effect of Data Augmentation in DrNIN
Data augmentation [47] is defined as an augmentation process that significantly improves the quality of predictions by artificially increasing the data volume for training the model without the need to collect new data, that is, creating new data from existing data. Data augmentation techniques can consist of rotations, distortions, cropping, color changes, adding noise, padding, and horizontal flipping commonly used to train large neural networks. Exploitation of this confirming layer shows a positive effect in reducing the classification test error and automatically leads to significantly better results than learning without exploiting this layer. In addition, experimental results show that the DrNIN model with batch normalization [2] achieves higher precision than a DrNIN without this normalization layer.
4. Experimental Results
4.1. Overview
For the training of our model, we have adapted the same training details exploited by [1] to form our configurations. In addition, we have adapted the same procedure for initializing neural weights and biases in all convolutional layers as well as MLP layers. For the learning rate, it was initialized to 0.01 and divided by 10 three times before the end of the training at times 35, 55, and 90. We trained the network for about 195 cycles on the CIFAR-10 dataset in an Intel Xeon Processor E5-2620 v4, 64 GB DDR4-2400, 8 cores, 16 threads. The design and implementation of this model is done using the TensorFlow deep learning library to classify and recognize images. The CIFAR-10 (Canadian Institute for Advanced Research) dataset consists of 60,000 images grouped into 10 image classes with 6,000 images in each class. This collection of images is commonly used to train machine learning and computer vision algorithms. In this database, all the images are RGB images of size 32 × 32. The dataset is divided into five training packages and one test package, each containing 10,000 images. The test lot contains exactly 1000 images selected at random from each class. The training packages contain exactly 5000 images of each class. The classes are completely exclusive of each other. There will be no overlap between automobiles and trucks. Unlike the MNIST dataset, the objects in these classes are much more complex in nature and extremely varied. If we look at the CIFAR-10 dataset, we realize that there is not just one type of bird or cat. The class of birds and cats contains many types of birds and cats that vary in size, color, magnification, different angles, and different poses. In the following, we evaluate our different configurations proposed on this benchmark dataset.
4.2. The Performances of Different Configurations
The experimental results shown in Table 5, on the CIFAR-10 datasets, show the test accuracy rates for all of the proposed DrNIN configurations. These experimental results which were obtained by calculating the average over 5 runs with mini lot size equivalent to 128 also demonstrate the effectiveness of the proposed idea of reformulating convolutional layers as residual learning functions.
Table 5.
Test error (%) of DrNIN on CIFAR-10.
| X | #Depth | CIFAR-10 |
|---|---|---|
| (3, R) | 3 | 11.57% |
| 4 | 11.25% | |
| 5 | 11.11% | |
|
| ||
| (3, R, BD) | 3 | 09,88% |
| 4 | 09,37% | |
| 5 | 09,03% | |
|
| ||
| (3, R, BD, D) | 3 | 07,34% |
| 4 | 07,28% | |
| 5 | 07,21% | |
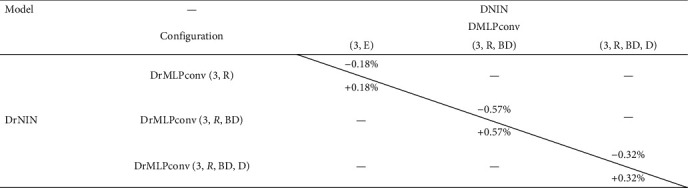
Moreover, they show that the DrNIN offers better results than the different DNIN configurations [1], which are, respectively, 88.25%, 90.63%, and 92.54%. Table 6 shows the difference between the test accuracy of different similar configurations of DNIN [1] and DrNIN (L = 3). The test accuracy of the basic DrNIN configuration exceeds the basic DNIN configuration with 0.18%, and the DrNIN configuration with the normalization and regularization layers exceeds the DNIN configuration with the normalization and regularization layers with 0.57%. Finally, DrNIN with data augmentation exceeds DNIN [1] with the same layer with 0.32%. It is recalled that the DNIN [1] delivers a precision equivalent to 90.44% by using 4 DMLPconv layers with dropout layers [46] without using batch normalization layers [2].
Table 6.
CIFAR-10 test error. A comparison between DNIN [1] and DrNIN for L = 3.
|
In terms of parameters, our model consumes 18.54 M for a configuration with a hyperparameter equivalent to 3 (L = 3). For a configuration of 4 DrMLPconv (L = 4), the model uses 25.79 M and 33.04 M for a configuration with L = 5. It offers a number of parameters superior to the WRN (16–8; 40–4) and ResNet (110, 1202) models despite their depth and width. For example, the DrNIN model with a hyperparameter equivalent to 3 (L = 3) consumes 16.85 times more parameters than DNIN [1], 10.90 times more than ResNet-101, and 0.27 times more than ResNeXt-29 (16 × 64d). Figure 5 shows the number of parameters consumed from architectures already completed.
Figure 5.
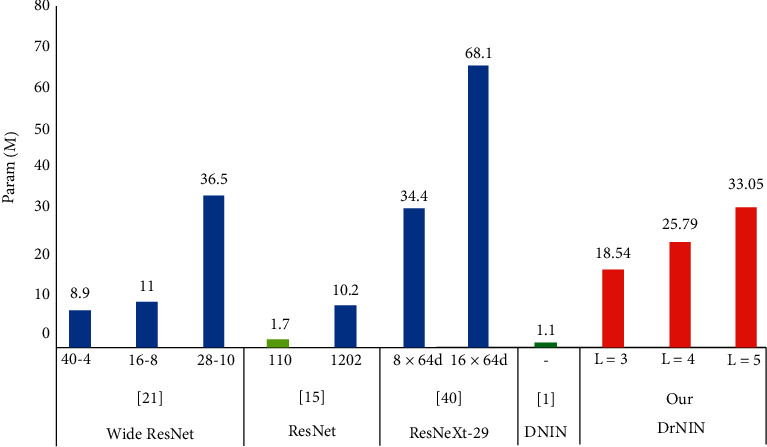
The parameters of the architectures already completed. The parameters (M) of our models are in red.
DrNIN provides classification precision that allows it to have a well-localized location between multiple baselines. Moreover, the experimental results show that the exploitation of the data augmentation layer [47] or/and the batch normalization layer [2] produces a useful effect in reducing the error of the classification test. Table 7 represents a comparison between the proposed model and the state of the art on the CIFAR-10 database with/without the use of data augmentation. The results of our work are presented with mini lot size equivalent to 128 and by calculating the average of 5 runs.
Table 7.
CIFAR-10 test error.
| Ref | Method | Error (%) |
|---|---|---|
| Without data augmentation | ||
| [30] | Stochastic pooling | 15.13 |
| [39] | Maxout network (k = 2) | 11.68 |
| [2] | NIN | 10.41 |
| [1] | DNIN | 9.37 |
| Our | DrNIN (l = 5) | 9,03 |
| [40] | MIM (k = 2) | 8.52 ± 0.20 |
|
| ||
| With data augmentation | ||
| [39] | Maxout network (k = 2) | 9.38 |
| [2] | NIN | 8.81 |
| [1] | DNIN | 7.46 |
| Our | DrNIN (l = 5) | 7.21 |
| [14] | ResNet | 6.43 |
| [23] | Wide ResNet (28, 10) | 3.89 |
| [48] | ResNeXt | 3.58 |
4.3. Visualization of Weights
The convolution layer always constitutes at least the first layer and its goal is to identify the presence of a set of features in the images received as input. Viewing the weights of the first convolutional layer is most preferable since it looks directly at the raw pixel data. In the following, we visualize the weights of 192 convolutional kernels of size 3 × 3 learned by the first convolution layer on the 32 × 32 input images for the first convolution layer of DrMLPconv (3, R, BD) in Figure 6.
Figure 6.
192 convolution cores of size 3 × 3 learned by the first convolution layer of the DrMLP (3, R, BD, D).
5. Advantage and Limitations
The proposed DrNIN model provides an interesting and competitive test precision which exceeds the precision of other models based on nonlinear filters such as [1, 21, 39, 42] and which allows it to occupy an important place between the various works reported in the literature. DrNIN provides interesting test errors against the baseline. The importance of DrNIN also stems from its homogeneous structure which makes it very suitable for implementation as a hardware accelerator in FPGAs or integration as an image recognition system in embedded systems applications. However, DrNIN incorporates drawbacks and limitations which mainly reside in the number of DrMLPconv layers “L” and the number of convolution kernels. This negatively affects the number of parameters, computational complexity, and memory.
6. Conclusion
In this paper, a new deep residual network in network (DrNIN) model for image classification is proposed. In this model, a new nonlinear DrMLPconv filter is used. This layer is based on a residual block applied to very small convolutional filter sizes (3 × 3) to accelerate learning model. The use of these layers leads to an improvement in the classification precision. In addition, a proposed, detailed study and experimental DrNIN model is presented describing with details the effect of different layers on improving accuracy. The results are described as acceptable compared to other architectures tested on the CIFAR-10 datasets and once again confirm the importance of residual block on increasing depth and improving classification accuracy. Future work should focus on designing new versions of CNN models that can achieve or exceed level accuracy of this proposed model requiring shorter training time with less parameter consumption.
Acknowledgments
This work was supported by the Electronics and Microelectronics Laboratory.
Abbreviations
- CNN:
Convolutional neural network
- NIN:
Network in network
- DNIN:
Deep network in network
- DrNIN:
Deep residual network in network
- MLP:
Multilayer perceptron
- DMLPconv:
Deep MLPconv
- DrMLPconv:
Deep residual MLPconv
- ReLU:
Rectified linear unit
- eLU:
Exponential linear unit.
Data Availability
The data used to support the findings of this study are included within the article.
Conflicts of Interest
The authors declare that there are no conflicts of interest regarding the publication of this article.
References
- 1.Alaeddine H., Jihene M. Deep network in network. Neural Computing and Applications. 2020;134 doi: 10.1007/s00521-020-05008-0. [DOI] [Google Scholar]
- 2.Ioffe S., Szegedy C. Batch normalization: accelerating deep network training by reducing internal covariate shift. 2015. http://arxiv.org/abs/1502.03167.
- 3.Huang G., Sun Y., Liu Z., Sedra D., Weinberger K. Q. Deep networks with stochastic depth. Computer Vision-ECCV 2016. 2016;9908:646–661. doi: 10.1007/978-3-319-46493-0_39. [DOI] [Google Scholar]
- 4.Bengio Y., Glorot X. Understanding the difficulty of training deep feedforward neural networks. Proceedings of AISTATS. 2010;9:249–256. [Google Scholar]
- 5.He K., Zhang X., Ren S., Sun J. Delving deep into rectifiers: surpassing human-level performance on imagenet classification. 2015. http://arxiv.org/abs/1502.01852.
- 6.Sutskever I., Martens J., Dahl G. E., Hinton G. E. On the importance of initialization and momentum in deep learning. In: Dasgupta S., Mcallester D., editors. Proceedings of the 30th International Conference on Machine Learning (ICML-13); May 2013; New Brunswick, NJ, USA. JMLR Workshop and Conference Proceedings; pp. 1139–1147. [Google Scholar]
- 7.Lee C.-Y., Xie S., Gallagher P., Zhang Z., Tu Z. Deeply-supervised nets. 2014. http://arxiv.org/abs/1409.5185.
- 8.Raiko T., Valpola H., Lecun Y. Deep learning made easier by linear transformations in perceptrons. In: Lawrence N. D., Girolami M. A., editors. Proceedings of the Fifteenth International Conference on Artificial Intelligence and Statistics (AISTATS-12); April 2012; La Palma, Canary Islands, Spain. pp. 924–932. [Google Scholar]
- 9.Chen T., Goodfellow I., Shlens J. Net2net: accelerating learning via knowledge transfer. 2016. http://arxiv.org/abs/1511.05641.
- 10.Romero A., Ballas N., Kahou S. E., Antoine C., Gatta C., Bengio Y. FitNets: hints for thin deep nets. 2014. http://arxiv.org/abs/1412.6550.
- 11.Schmidhuber J. Learning complex, extended sequences using the principle of history compression. Neural Computation. 1992;4(2):234–242. doi: 10.1162/neco.1992.4.2.234. [DOI] [Google Scholar]
- 12.LeCun Y., Bottou L., Orr G. B., Muller K.-R. Neural Networks: Tricks of the Trade. Berlin, Germany: Springer; 1998. Efficient backprop. [Google Scholar]
- 13.Glorot X., Bengio Y. Understanding the difficulty of training deep feedforward neural networks. Journal of Machine Learning Research. 2010;9 [Google Scholar]
- 14.He K., Zhang X., Ren S., Sun J. Deep residual learning for image recognition. 2015. http://arxiv.org/abs/1512.03385.
- 15.Alom Md. Z., Hasan M., Yakopcic C., Taha T., Asari V. Recurrent residual convolutional neural network based on U-Net (R2U-Net) for medical image segmentation. 2018. https://arxiv.org/abs/1802.06955.
- 16.Zeiler M. D., Fergus R. Visualizing and understanding convolutional networks. 2013. http://arxiv.org/abs/1311.2901.
- 17.Simonyan K., Zisserman A. Very deep convolutional networks for large-scale image recognition. 2014. http://arxiv.org/abs/1409.1556.
- 18.Huang G., Liu Z., Weinberger K. Q., Van Der Maaten L. Densely connected convolutional networks. 2017. https://arxiv.org/abs/1608.06993.
- 19.Iandola F., Han S., Moskewicz M., Ashraf K., Dally W., Keutzer K. SqueezeNet: alexnet-level accuracy with 50x fewer parameters and <0.5MB model size. 2016. https://arxiv.org/abs/1602.07360v4.
- 20.Gao S., Miao Z., Zhang Q., Li Q. DCRN: densely connected refinement network for object detection. Journal of Physics: Conference Series. 2019;1229 doi: 10.1088/1742-6596/1229/1/012034.012034 [DOI] [Google Scholar]
- 21.Lin M., Chen Q., Yan S. Network in network. 2013. http://arxiv.org/abs/1312.4400.
- 22.Chen L.-C., Papandreou G., Kokkinos I., et al. DeepLab: semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs. IEEE Transactions on Pattern Analysis and Machine Intelligence. 2018;40(4):p. 834. doi: 10.1109/TPAMI.2017.2699184. [DOI] [PubMed] [Google Scholar]
- 23.Zagoruyko S., Komodakis N. Wide residual networks. 2016. http://arxiv.org/abs/1605.07146.
- 24.Szegedy C. Going deeper with convolutions. Proceedingsof the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); June 2015; Boston, MA USA. pp. 1–9. [DOI] [Google Scholar]
- 25.Ciresan D., Meier U., Schmidhuber J. Multi-column deep neural networks for image classification. 2012. http://arxiv.org/abs/1202.2745. [DOI] [PubMed]
- 26.Gregor K., LeCun Y. Emergence of complex-like cells in a termporal product network with local receptive fields. 2010. http://arxiv.org/abs/1006.0448.
- 27.Krizhevsky A., Sutskever I., Hinton G. Imagenet classification with deep convolutional neural networks. Advances in Neural Information Processing Systems. 2012;25:1097–1105. [Google Scholar]
- 28.Jarrett K., Kavukcuoglu K., Ranzato M. A., LeCun Y. What is the best multi-stage architecture for object recognition?. Proceedings of the IEEE International Conference on Computer Vision; September 2009; Corfu, Greece. pp. 2146–2153. [Google Scholar]
- 29.LeCun Y., Kavukcuoglu K., Farabet C. Convolutional networks and applications in vision. Proceedings of the International Symposium on Circuits and Systems (ISCAS 2010); June 2010; Paris, France. pp. 253–256. [Google Scholar]
- 30.Zeiler M. D., Fergus R. Stochastic pooling for regularization of deep convolutional neural networks. 2013. http://arxiv.org/abs/1301.3557.
- 31.He K., Zhang X., Ren S., Sun J. Spatial pyramid pooling in deep convolutional networks for visual recognition. 2014. http://arxiv.org/abs/1406.4729. [DOI] [PubMed]
- 32.Chan T., Jia K., Gao S., Lu J., Zeng Z., Ma Y. PCANet: a simple deep learning baseline for image classification? 2014. http://arxiv.org/abs/1404.3606. [DOI] [PubMed]
- 33.Lee C., Gallagher P., Tu Z. Generalizing pooling functions in convolutional neural networks: mixed gated and tree. 2015. https://arxiv.org/abs/1509.08985. [DOI] [PubMed]
- 34.Springenberg J., Dosovitskiy A., Brox T. T., Riedmiller M. Striving for simplicity: the all convolutional net. 2014. http://arxiv.org/abs/1412.6806.
- 35.Gong Y., Wang L., Guo R., Lazebnik S. Multi-scale orderless pooling of deep convolutional activation features. 2014. http://arxiv.org/abs/1403.1840.
- 36.Yoo D., Park S., Lee J., Kweon I. Multi-scale pyramid pooling for deep convolutional representation. Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); September 2015; Boston, MA USA. pp. 1–5. [Google Scholar]
- 37.Graham B. Fractional max-pooling. 2014. https://arxiv.org/abs/1412.6071.
- 38.Murray N., Perronnin F. Generalized max pooling. Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR); September 2015; Boston, MA USA. pp. 2473–2480. [Google Scholar]
- 39.Goodfellow I. J., Warde-Farley D., Mirza M., Courville A. C., Bengio Y. Maxout networks. 2013. https://arxiv.org/abs/1302.4389.
- 40.Liao Z., Carneiro G. On the importance of normalisation layers in deep learning with piecewise linear activation units. 2016. https://arxiv.org/abs/1508.00330.
- 41.Clevert D. Fast and accurate deep network learning by exponential linear units (ELUs) 2015. https://arxiv.org/abs/1511.07289.
- 42.Chang J.-R., Chen Y.-S. Batch-normalized maxout network in network. 2015. http://arxiv.org/abs/1511.02583.
- 43.Goodfellow I. J., Shlens J., Szegedy C. Explaining and harnessing adversarial examples. 2014. https://arxiv.org/abs/1412.6572.
- 44.Fan F., Wang G. Fuzzy logic interpretation of quadratic networks. Neurocomputing. 2019;374 doi: 10.1016/j.neucom.2019.09.001.09252312 [DOI] [Google Scholar]
- 45.Liu Y., Zhang J., Gao C., Qu J., Ji L. NaturalLogarithm-rectified activation function in convolutional neural networks. 2019. https://arxiv.org/abs/1908.03682.
- 46.Srivastava N., Geoffrey H., Krizhevsky A., Ilya S., Ruslan S., Dropout A simple way to prevent neural networks from overfitting. Journal of Machine Learning Research. 2014;15:1929–1958. [Google Scholar]
- 47.Shorten C., Khoshgoftaar T. M. A survey on image data augmentation for deep learning. Journal of Big Data. 2019;6:p. 60. doi: 10.1186/s40537-019-0197-0. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 48.Xie S., Girshick R., Dollár P., Tu Z., He K. Aggregated residual transformations for deep neural networks. 2016. https://arxiv.org/abs/1611.05431.
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
The data used to support the findings of this study are included within the article.