

Abstract
A quandle is a set that has a binary operation satisfying three conditions corresponding to the Reidemeister moves. Homology theories of quandles have been developed in a way similar to group homology, and have been applied to knots and knotted surfaces. In this paper, a homology theory is defined that unifies group and quandle homology theories. A quandle that is a union of groups with the operation restricting to conjugation on each group component is called a multiple conjugation quandle (MCQ, defined rigorously within). In this definition, compatibilities between the group and quandle operations are imposed which are motivated by considerations on colorings of handlebody-links. The homology theory defined here for MCQs takes into consideration both group and quandle operations, as well as their compatibility. The first homology group is characterized, and the notion of extensions by 2-cocycles is provided. Degenerate subcomplexes are defined in relation to simplicial decompositions of prismatic (products of simplices) complexes and group inverses. Cocycle invariants are also defined for handlebody-links.
Keywords: quandle, homology, handlebody-link
1. Introduction
In this paper, a homology theory is proposed that contains aspects of both group and quandle homology theories, for algebraic structures that have both operations and certain compatibility conditions between them.
The notion of a quandle [Joyce 1982; Matveev 1982] was introduced in knot theory as a generalization of the fundamental group. Briefly, a quandle is a set with a binary operation that is idempotent and self-distributive, and a bijective corresponding right action. The axioms correspond to the Reidemeister moves, and quandles have been used extensively to construct knot invariants. They have been considered in various other contexts, for example as symmetries of geometric objects [Takasaki 1943], and with different names, such as distributive groupoids [Matveev 1982] and automorphic sets [Brieskorn 1988]. A typical example is a group conjugation a * b = b−1ab which is an expression of the Wirtinger relation for the fundamental group of the knot complement. The same structure but without idempotency is called a rack, and is used in the study of framed links [Fenn and Rourke 1992].
In [Fenn et al. 1995] a chain complex was introduced for racks. The resulting homology theory was modified in [Carter et al. 2003] by defining a quotient complex that reflected the quandle idempotence axiom. The motivation for this homology was to construct the quandle cocycle invariants for links and surface-links. Since then a variety of applications have been found. The quandle cocycle invariants were generalized to handlebody-links in [Ishii and Iwakiri 2012]. When a set has multiple quandle operations that are parametrized by a group, the structure is called a G-family of quandles; this notion, with its associated homology theory, was introduced in [Ishii et al. 2013] and it too was motivated from handlebody-knots. This homology theory is called IIJO. In particular, cocycle invariants were introduced that distinguished mirror images of some handlebody-knots. These G-families were further generalized to an algebraic system called a multiple conjugation quandle (MCQ) in [Ishii 2015b] for colorings of handlebody-knots. An MCQ has a quandle operation and partial group operations, all linked by compatibility conditions.
This paper proposes to unify the group and quandle homology theories for MCQs. The definition of an MCQ is recalled in Section 2 as a generalization of a G-family of quandles. A homology theory is defined (in Section 3) that simultaneously encompasses the group and quandle homologies of the interrelated structures. As in the case of [Carter et al. 2003], some subcomplexes are defined in order to compensate for the topological motivation of the theory. The first homology group is characterized, and the notion of extensions by 2-cocycles is provided in Section 4.
The homology theory for MCQs is well suited for handlebody-links such that each toroidal component has its core circle oriented, as defined in Section 5. When considering colorings for unoriented handlebody-links, we also need to take into consideration issues about the inverse elements in the group (Section 6). Prismatic sets (products of simplices) are decomposed into subsimplices that are higher-dimensional duals of graph moves; Section 7 defines a subcomplex that compensates for these subdivisions. In Sections 8 and 9, we relate this homology theory with group and quandle homology theories. Finally, in Section 10, we discuss approaches to finding new 2-cocycles of our homology theory.
2. Multiple conjugation quandles
First, recall a quandle [Joyce 1982; Matveev 1982] is a nonempty set X with a binary operation *: X × X → X satisfying the following axioms:
For any a ∈ X, we have a * a = a.
For any a ∈ X, the map Sa: X → X defined by Sa(x) = x * a is a bijection.
For any a, b, c ∈ X, we have (a * b) * c = (a * c) * (b * c).
Definition 1 [Ishii 2015b]
A multiple conjugation quandle (MCQ) X is the disjoint union of groups Gλ, where λ is an element of an index set Λ, with a binary operation *: X × X → X satisfying the following axioms:
For any a, b ∈ Gλ, we have a * b = b−1ab.
For any x ∈ X and a, b ∈ Gλ, we have x * eλ = x and x * (ab) = (x * a) * b, where eλ is the identity element of Gλ.
For any x, y, z ∈ X, we have (x * y) * z = (x * z) * (y * z).
For any x ∈ X and a, b ∈ Gλ, we have (ab) * x = (a * x)(b * x) in some group Gμ.
We call the group Gλ a component of the MCQ. An MCQ is a type of quandle that can be decomposed as a union of groups, and the quandle operation in each component is given by conjugation. Moreover, there are compatibilities, (2) and (4), between the group and quandle operations.
Note that the quandle axiom a * a = a follows immediately since the operation in any component is given by conjugation. The second quandle axiom also follows, since for the map Sa: X → X defined by Sa(x) = x * a, the inverse map is given by Sa<sup>−1</sup>. The second axiom of MCQs implies that the map ϕ: Gλ → AutQnd X defined by ϕ(a) = Sa is a group homomorphism, where AutQnd X is the set of quandle automorphisms of X and is the group with the multiplication defined by Sa Sb: = Sb ∘ Sa. The last axiom (4) may be replaced by the following:
-
(4′)
For any x ∈ X and λ ∈ Λ, there is a unique element μ ∈ Λ such that Sx(Gλ) = Gμ and that Sx: Gλ → Gμ is a group isomorphism.
The axiom (4) immediately follows from (4′). Conversely, (4′) follows from (4): the condition (4) contains the condition that for any a, b ∈ Gλ and x ∈ X, there exists a unique μ ∈ Λ such that a * x, b * x ∈ Gμ. Hence we have Sx(Gλ) ⊂ Gμ, which implies that Sx: Gλ → Gμ is a well-defined group homomorphism by the condition (ab) * x = (a * x)(b * x). The homomorphism Sx: Gλ → Gμ is a group isomorphism, since Sx<sup>−1</sup>: Gμ → Gλ gives its inverse.
A multiple conjugation quandle can be obtained from a G-family of quandles as follows.
Example 2
Let G be a group with identity element e, let (M, {*g}g ∈ G) be a G-family of quandles [Ishii et al. 2013]; i.e., a nonempty set M with a family of binary operations *g: M × M → M (g ∈ G) satisfying
for x, y, z ∈ M and g, h ∈ G. Then ∐x ∈ M{x} × G is a multiple conjugation quandle with
The following are specific examples of G-families of quandles.
Let M be a group, and G be a subgroup of Aut M. Then for x, y ∈ M and g ∈ G, x * y = (xy−1)g y gives a G-family of quandles. Here xg denotes g acting on x. The fact that this is a G-family was pointed out in [Przytycki 2011]; however, that any specific automorphism g yields a quandle was earlier observed in [Joyce 1982; Matveev 1982]. When M is abelian and an element g ∈ G is fixed, the resulting quandle is called an Alexander quandle.
Let (X, *) be a quandle. We denote by a *n b. Put Z: = ℤ or ℤ/mℤ, where m: = min{i > 0 | x *i y = x for any x, y ∈ X}. Then (X, {*n}n ∈ Z) is a Z-family of quandles.
For a multiple conjugation quandle X = ∐λ ∈ Λ Gλ, an X-set is a nonempty set Y with a map *: Y × X → Y satisfying the following axioms, where we use the same symbol * as the binary operation of X.
For any y ∈ Y and a, b ∈ Gλ, we have y * eλ = y and y * (ab) = (y * a) * b, where eλ is the identity of Gλ.
For any y ∈ Y and a, b ∈ X, we have (y * a) * b = (y * b) * (a * b).
Any multiple conjugation quandle X itself is an X-set with its binary operation. Any singleton set {y0} is also an X-set with the map * defined by y0 * x = y0 for x ∈ X, which is called a trivial X-set. The index set Λ is an X-set with the map * defined by λ * x = μ when Sx(Gλ) = Gμ for λ, μ ∈ Λ and x ∈ X.
3. Homology theory
In this section, we define a chain complex for MCQs that contains aspects of both group and quandle homology theories. A subcomplex is also defined that corresponds to a Reidemeister move for handlebody-links.
Let X = ∐λ ∈ Λ Gλ be a multiple conjugation quandle, and let Y be an X-set. In what follows, we denote a sequence of elements of X by a bold symbol such as a, and denote by |a| the length of a sequence a. For example, (a), 〈a〉, (y; a; b) respectively denote
Let Pn(X)Y be the free abelian group generated by the elements
if n ≥ 0, and let Pn(X)Y = 0 otherwise. The elements of Pn(X)Y are called prismatic chains and Pn(X)Y is called the prismatic chain group. Note that for each j, the elements aj,1, …, aj,n<sub>j</sub> belong to one of the Gλ. For example, P3(X)Y is generated by the elements (y; a; b; c), (y; a; e, f), (y; d, e; c) and (y; d, e, f) (where a, b, c ∈ X, d, e, f ∈ Gλ, y ∈ Y). Here a, b, c may or may not belong to the same Gμ (μ ∈ Λ), but d, e, f belong to the same Gλ. All may belong to the same Gλ.
We represent (y; a1; …; ak) using the noncommutative multiplication form
We define 〈y〉〈a1〉 ··· 〈ak〉 * b: = 〈y * b〉〈a1 * b〉 ··· 〈ak * b〉, where 〈a * b〉 denotes 〈a1 * b, …, a|a| * b〉. We set |〈y〉〈a1〉 ··· 〈ak〉|: = |a1| + ··· + |ak|.
We define a boundary homomorphism ∂n: Pn(X)Y → Pn−1(X)Y by
where
The resulting terms ∂(〈a〉) = *a〈 〉 − 〈 〉 for m = 1 in the above expression mean that the formal symbol 〈 〉 is deleted. For n = 0, we define ∂〈y〉 = 0.
Example 3
The boundary maps in two and three dimensions are computed as follows.
Proposition 4
P*(X)Y = (Pn(X)Y, ∂n) is a chain complex.
Proof
The Leibniz rule
is a restatement of the definition when k = 2. In fact, the general definition follows from this by induction. Also ∂(σ * a) = (∂σ) * a, and ∂ ∘ ∂ = 0 follows from these two facts.
We will later define a degeneracy subcomplex that is analogous (albeit more complicated) to the subcomplex of degeneracies for quandle homology. Before its definition, we give a description of simplicial decompositions of products of simplices for motivation. We identify an n-simplex Δn with the set
called the right n-simplex. Then the n-cube [0, 1]n can be decomposed into n! sets each of which is congruent to this right n-simplex that has n edges of length 1, and has (n − k + 1) edges of length for k = 1, …, n. More specifically, for x⃗ ∈ [0, 1]n consider the permutation σ ∈ Σn such that 0 ≤ xσ(1) ≤ xσ(2) ≤ ··· ≤ xσ(n) ≤ 1. If the coordinates of x⃗ are all distinct, then there is a unique such σ and an n-simplex congruent to the right n-simplex such that x⃗ lies in the interior of . Otherwise x⃗ lies in the boundary of more than one such simplex. Now consider the product of right simplices
where the notation (x⃗, y⃗) represents (x1, …, xs, y1, …, yt). This can be decomposed as a union of simplices of the form given above. For
where n = s + t, there is an associated simplex that contains the point (x⃗, y⃗). Suppose all coordinates of z⃗ are distinct, and let σ ∈ Σn be a permutation such that 0 < zσ(1) < ··· < zσ(n). Then the subset {i1, i2, …, is} ⊂ {1, 2, …, s + t} with i1 < i2 < ··· < is is determined from the positions of coordinates of x⃗, so that zi<sub>k</sub> = xk for k = 1, …, s. Thus a given subset {i1, i2, …, is} ⊂ {1, 2, …, s + t} where i1 < i2 < ··· < is determines an n-simplex in the decomposition of Δs × Δt. We proceed to the definition of the degeneracy subcomplex.
For an expression of the form 〈a〉〈b〉 in a chain in Pn(X)Y, where 〈a〉 = 〈a1, …, as〉 and 〈b〉 = 〈b1, …, bt〉 satisfy ai, bj ∈ Gλ for all i = 1, …, s and j = 1, …, t, let the notation 〈〈a〉〈b〉〉i<sub>1</sub>,…,i<sub>s</sub> represent , where 1 ≤ i1 < ··· < ik < ··· < is ≤ s + t, and
If i = k in the first case, then we regard (b1 ··· bi − k) to be empty. For example, 〈〈a〉〈b〉〉1 = 〈a, b〉, 〈〈a〉〈b〉〉2 = −〈b, a * b〉, and 〈〈a, b〉〈c〉〉1,3 = −〈a, c, b * c〉. We also define the notation 〈〈a〉〈b〉〉 by
Define Dn(X)Y to be the subgroup of Pn(X)Y generated by the elements of the form
where we implicitly assume the linearity of the notations 〈〈a〉〈b〉〉i<sub>1</sub>,…,i<sub>s</sub> and 〈〈a〉〈b〉〉, that is,
The chain group Dn(X)Y is called the group of decomposition degeneracies. We will see that D*(X)Y = (Dn(X)Y, ∂n) is a subcomplex of P*(X)Y in Section 7.
We remark that the elements of the form
belong to Dn(X)Y.
For example, D2(X)Y is generated by the elements of the form
and D3(X)Y is generated by the elements of the form
for a, b, c ∈ Gλ, x ∈ X.
Definition 5
The quotient complex of P*(X)Y modulo decomposition degeneracies D*(X)Y is denoted by C*(X)Y = (Cn(X)Y, ∂n), where Cn(X)Y = Pn(X)Y/Dn(X)Y. For an abelian group A, define the cochain complex C*(X; A)Y = Hom(C*(X)Y, A). Denote by Hn(X)Y the n-th homology group of C*(X)Y.
4. Algebraic aspects of the homology
In this section we study algebraic aspects of the homology theory we defined. Specifically, we characterize the first homology group, and show that a 2-cocycle defines an extension. For simplicity we consider the case Y = {y0} is a singleton, and we suppress the symbols 〈y0〉 whenever possible.
Let X be a multiple conjugation quandle, and Y = {y0} be a singleton. Then P0(X)Y is infinite cyclic, generated by 〈y0〉, and ∂1(〈y0〉〈a〉) = 〈y0 * a〉 − 〈y0〉 for a ∈ X. Hence H0(X)Y = ℤ. If X is a multiple conjugation quandle consisting of a single group, H1(X)Y ≅ Xab, since P1(X)Y is the free abelian group generated by the elements 〈y0〉〈a〉 (a ∈ X), and
Proposition 6
Let X = ∐λ ∈ Λ Gλ be a multiple conjugation quandle, let Y = {y0} be a singleton, and A an abelian group. A map ϕ: P2(X)Y → A is a 2-cocycle of C*(X)Y if and only if X × A = ∐λ ∈ Λ(Gλ × A) with
is a multiple conjugation quandle, where ϕ(〈y0〉〈a〉〈b〉) and ϕ(〈y0〉〈a, b〉) are respectively denoted by ϕ(〈a〉〈b〉) and ϕ(〈a, b〉) for short. Further, (eλ, −ϕ(〈eλ, eλ〉)) is the identity of the group Gλ × A, and (a−1, −s −ϕ(〈a, a−1〉) −ϕ(〈eλ, eλ〉)) is the inverse of (a, s) ∈ Gλ × A.
Proof
We show correspondences between cocycle conditions and MCQ conditions for the extension.
(1) The correspondence between the cocycle condition ϕ(∂3(〈a, b, c〉)) = 0 and the associativity of a group.
For (a, s), (b, t), (c, u) ∈ Gλ × A, ϕ(〈a, b〉) + ϕ(〈ab, c〉) = ϕ(〈b, c〉) + ϕ(〈a, bc〉) if and only if ((a, s)(b, t))(c, u) = (a, s)((b, t)(c, u)), since
We note that ϕ(〈a, b〉) + ϕ(〈ab, c〉) = ϕ(〈b, c〉) + ϕ(〈a, bc〉), or equivalently ((a, s)(b, t))(c, u) = (a, s)((b, t)(c, u)) implies that ϕ(〈a, eλ〉) = ϕ(〈eλ, c〉) and that ϕ(〈b−1, b〉) = ϕ(〈b, b−1〉). These equalities respectively imply
and
It follows that (eλ,−ϕ(〈eλ, eλ〉)) is the identity of the group Gλ × A, and that (a−1,−s −ϕ(〈a, a−1〉)−ϕ(〈eλ, eλ〉)) is the inverse of (a, s) ∈ Gλ × A.
(2) The correspondence between the degeneracy of ϕ on D2(X)Y and the first axiom of MCQs.
For (a, s), (b, t) ∈ Gλ× A, ϕ(〈a〉〈b〉)+ϕ(〈b, a *b〉) = ϕ(〈a, b〉) if and only if (b, t)((a, s) * (b, t)) = (a, s)(b, t), since
(3) The correspondence between the cocycle condition ϕ(∂3(〈x〉〈a, b〉)) = 0 and the second axiom of MCQs.
For (x, r) ∈ X × A and (a, s), (b, t) ∈ Gλ × A,
if and only if (x, r) * ((a, s)(b, t)) = ((x, r) * (a, s))* (b, t), since
Note ϕ(〈x〉〈ab〉)=ϕ(〈x〉 〈a〉)+ϕ(〈x*a〉〈b〉), or equivalently (x, r)*((a, s)(b, t))= ((x, r) * (a, s)) * (b, t), implies that ϕ(〈x〉〈eλ〉) = 0. Then we have
(4) The correspondence between the cocycle condition ϕ(∂3(〈a〉 〈b〉 〈c〉)) = 0 and the third axiom of MCQs.
For (a, s), (b, t), (c, u) ∈ X × A,
if and only if ((a, s) * (b, t))* (c, u) = ((a, s) * (c, u))* ((b, t) * (c, u)), since
(5) The correspondence between the cocycle condition ϕ(∂3(〈a, b〉〈x〉)) = 0 and the last axiom of MCQs.
For (x, r) ∈ X × A and (a, s), (b, t) ∈ Gλ × A,
if and only if ((a, s)(b, t)) * (x, r) = ((a, s) * (x, r))((b, t) * (x, r)), since
Therefore ϕ is a 2-cocycle if and only if X×A is a multiple conjugation quandle.
5. Quandle cocycle invariants for handlebody-links
The definition of a multiple conjugation quandle is motivated from handlebody-links and their colorings [Ishii 2015b]. A handlebody-link is a disjoint union of handlebodies embedded in the 3-sphere S3. A handlebody-knot is a one component handlebody-link. Two handlebody-links are equivalent if there is an orientation-preserving self-homeomorphism of S3 which sends one to the other. A diagram of a handlebody-link is a diagram of a spatial trivalent graph whose regular neighborhood is the handlebody-link, where a spatial trivalent graph is a finite trivalent graph embedded in S3. In this paper, a trivalent graph may contain circle components. Two handlebody-links are equivalent if and only if their diagrams are related by a finite sequence of R1–R6 moves depicted in Figure 1 [Ishii 2008].
Figure 1.

Reidemeister moves for handlebody-links.
An S1-orientation of a handlebody-link is an orientation of all genus 1 components of the handlebody-link, where an orientation of a solid torus is an orientation of its core S1. Two S1-oriented handlebody-links are equivalent if there is an orientation-preserving self-homeomorphism of S3 which sends one to the other preserving the S1-orientation. A Y-orientation of a spatial trivalent graph is an orientation of the graph without sources and sinks with respect to the orientation (see Figure 2). We note that the term Y-orientation is a symbolic convention, and has no relation to an X-set Y. A diagram of an S1-oriented handlebody-link is a diagram of a Y-oriented spatial trivalent graph whose regular neighborhood is the S1-oriented handlebody-link where the S1-orientation is induced from the Y-orientation by forgetting the orientations except on circle components of the Y-oriented spatial trivalent graph. Y-oriented R1–R6 moves are R1–R6 moves between two diagrams with Y-orientations which are identical except in the disk where the move applied. Two S1-oriented handlebody-links are equivalent if and only if their diagrams are related by a finite sequence of Y-oriented R1–R6 moves [Ishii 2015a]. Note that in Figure 1 (R6), if all end points are oriented downward, then either choice of the two possible orientations of the middle edge makes the diagram Y-oriented locally. Thus reversing an orientation of this edge can be regarded as applying Y-oriented R6 moves twice. This is the case whenever both orientations of an edge give Y-orientations.
Figure 2.

Y-orientation.
Let X = ∐λ∈Λ Gλ be a multiple conjugation quandle, and let Y be an X-set. Let D be a diagram of an S1-oriented handlebody-link H. We denote by 𝒜(D) the set of arcs of D, where an arc is a piece of a curve each of whose endpoints is an undercrossing or a vertex. We denote by ℛ(D) the set of complementary regions of D. In this paper, an orientation of an arc is represented by the normal orientation obtained by rotating the usual orientation counterclockwise by π/2 on the diagram. An X-coloring C of a diagram D is an assignment of an element of X to each arc α ∈ 𝒜(D) satisfying the conditions depicted in the left three diagrams in Figure 3 at each crossing and each vertex of D. An XY -coloring C of D is an extension of an X-coloring of D which assigns an element of Y to each region R ∈ ℛ(D) satisfying the condition depicted in the rightmost diagram in Figure 3 at each arc. We denote by ColX (D) (resp. ColX (D)Y) the set of X-colorings (resp. XY -colorings) of D. Then we have the following proposition.
Figure 3.

Rules of a coloring.
Proposition 7 [Ishii 2015a]
Let X = ∐λ∈Λ Gλ be a multiple conjugation quandle, and let Y be an X-set. Let D be a diagram of an S1-oriented handlebody-link H. Let D′ be a diagram obtained by applying one of the Y-oriented R1–R6 moves to the diagram D once. For an X-coloring (resp. XY -coloring) C of D, there is a unique X-coloring (resp. XY -coloring) C′ of D′ which coincides with C except near a point where the move applied.
For an XY -coloring C of a diagram D of an S1-oriented handlebody-link, we define the local chains w(ξ;C) ∈ C2(X)Y at each crossing ξ and each vertex ξ of D as depicted in Figure 4. We define a chain W(D;C) ∈ C2(X)Y by
Figure 4.

Local chains represented by crossings and vertices.
where ξ runs over all crossings and vertices of D. This is similar to the definitions found in [Carter et al. 2001] for links and surface-links, and in [Ishii and Iwakiri 2012] for handlebody-links.
Lemma 8
The chain W(D;C) is a 2-cycle of C*(X)Y. Further, for cohomologous 2-cocycles θ, θ′ of C*(X; A)Y, we have
Proof
It is sufficient to show that W(D;C) is a 2-cycle of C*(X)Y. We denote by 𝒮𝒜(D) the set of semiarcs of D, where a semiarc is a piece of a curve each of whose endpoints is a crossing or a vertex. We denote by 𝒮𝒜(D; ξ) the set of semiarcs incident to ξ, where ξ is a crossing or a vertex of D.
For a semiarc α, there is a unique region Rα facing α such that the normal orientation of α points from the region Rα to the opposite region with respect to α. For a semiarc α incident to a crossing or a vertex ξ, we define
Let χ1, …, χ4 and ω1, ω2, ω3 be the semiarcs incident to a crossing χ and a vertex ω as depicted in Figure 5. From
Figure 5.

Semiarcs near crossings and vertices.
it follows that
where χ and ω, respectively, run over all crossings and vertices of D.
Lemma 9
Let D be a diagram of an S1-oriented handlebody-link H. Let D′ be a diagram obtained by applying one of the Y-oriented R1–R6 moves to the diagram D once. Let C be an XY -coloring of D, let C′ be the unique XY -coloring of D′ such that C and C′ coincide except near a point where the move applied. Then we have [W(D;C)] = [W(D′;C′)] in H2(X)Y.
Proof
We have the invariance under the Y-oriented R1 and R4 moves, since the difference between [W(D;C)] and [W(D′;C′)] is an element of D2(X)Y. The invariance under the Y-oriented R2 move follows from the signs of the crossings which appear in the move. We have the invariance under the Y-oriented R3, R5, and R6 moves, since the difference between [W(D;C)] and [W(D′;C′)] is an image of ∂3. See Figure 6 for Y-oriented R6 moves, where all arcs are directed from top to bottom.
Figure 6.

Chains for Y-oriented R6 moves.
For a 2-cocycle θ of C*(X; A)Y, we define
as multisets. By Lemmas 8 and 9, we have the following theorem.
Theorem 10
Let D be a diagram of an S1-oriented handlebody-link H. Then ℋ(D) and Φθ (D) are invariants of H.
For an S1-oriented handlebody-link H, let H* be the mirror image of H, and −H be the S1-oriented handlebody-link obtained from H by reversing its S1-orientation. Then we also have
where −S = {−a | a ∈ S} for a multiset S. It is desirable to further study these invariants and applications to handlebody-links.
6. For unoriented handlebody-links
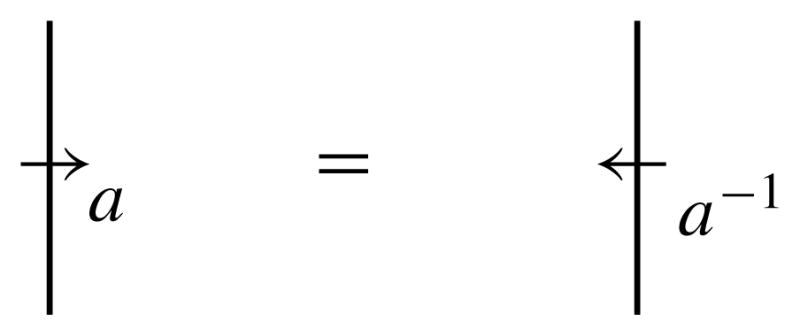
Let X =∐λ∈Λ Gλ be a multiple conjugation quandle, and let Y be an X-set. Let D be a diagram of an (unoriented) handlebody-link H. An (X, ↑)-color Cα of an arc α ∈ 𝒜(D) is a map Cα from the set of orientations of the arc α to X such that Cα(−o) = Cα(o)−1, where −o is the inverse of an orientation o. An (X, ↑)-color Cα is represented by a pair of an orientation o of α and an element Cα(o) ∈ X on the diagram D. Two pairs (o, a) and (−o, a−1) represent the same (X, ↑)-color (see Figure 7).
Figure 7.
(X, ↑)-color.
An (X, ↑)-coloring C of a diagram D is an assignment of an (X, ↑)-color Cα to each arc α ∈ 𝒜(D) satisfying the conditions depicted in the left two diagrams in Figure 8 at each crossing and each vertex of D. An (X, ↑)Y -coloring C of D is an extension of an (X, ↑)-coloring of D which assigns an element of Y to each region R ∈ ℛ(D) satisfying the condition depicted in the rightmost diagram in Figure 8 at each arc. We denote by Col(X,↑)(D) (resp. Col(X,↑)(D)Y the set of (X, ↑)-colorings (resp. (X, ↑)Y -colorings) of D. The well-definedness of an (X, ↑)-coloring (resp. (X, ↑)Y -coloring) follows from
Figure 8.

Rules of an unoriented coloring.
The first three equalities are the defining conditions of a good involution considered in [Kamada 2007; Kamada and Oshiro 2010]. They used the notion of a good involution precisely to allow for appropriate changes of orientations. Following their arguments, we can show the following proposition in the same way as Proposition 7.
Proposition 11
Let X =∐λ∈Λ Gλ be a multiple conjugation quandle, and let Y be an X-set. Let D be a diagram of a handlebody-link H. Let D′ be a diagram obtained by applying one of the R1–R6 moves to the diagram D once. For an (X, ↑)-coloring (resp. (X, ↑)Y -coloring) C of D, there is a unique (X, ↑)-coloring (resp. (X, ↑)Y -coloring) C′ of D′ which coincides with C except near a point where the move applied.
Let be the subgroup of Pn(X)Y generated by the elements of the form
where denotes
The chain group will be called the group of orientation degeneracies. For example, is generated by the elements of the form
and is generated by the elements of the form
We remark that the elements of the form
belong to . Furthermore, we can prove that the elements of the form
belong to by induction.
Lemma 12
is a subcomplex of P*(X)Y.
Proof
We have , since
and
Thus is a subcomplex of P*(X)Y.
Definition 13
We set . The quotient complex ( , ∂n) is denoted by . For an abelian group A, we define the cochain complex . We denote by the n-th homology group of .
For an (X, ↑)Y -coloring C of a diagram D for a handlebody-link, we define the local chains w(ξ;C) at each crossing ξ and each vertex ξ of D as depicted in Figure 4. The local chain is well-defined, since
in (see Figure 9). Then we can define the chain in the same way as W(D;C) ∈ C2(X)Y, and obtain invariants ℋ(H), Φθ (H) for an (unoriented) handlebody-link H.
Figure 9.

Well-definedness of local chains for unoriented handle-body-links.
7. Simplicial decomposition
The goal of this section is to prove Lemma 15 stating that D*(X)Y is a subcomplex. The formula of D2(X)Y, when 〈y〉 is omitted, is written as
and its geometric interpretation is depicted in Figure 10. In (A), a colored triangle representing 〈a, b〉 is depicted, as well as its dual graph with a trivalent vertex. The colorings of such a graph were discussed in Section 5. A colored square representing 〈a〉 〈b〉 is depicted in (B), with the dual graph that corresponds to a crossing. In (C), a triangulation of the square is depicted, and after triangulation it represents 〈a, b〉 – 〈b, a * b〉. Thus the triangulation corresponds to the above formula. This decomposition is found in [Carter et al. 2003].
Figure 10.

Dividing a square into triangles.
At the same time, this equation corresponds to Y-oriented R4 moves in Figure 1 as follows. In Figure 11, colored diagrams of Y-oriented R4 moves are depicted. In the left diagram, the left-hand side represents the chain 〈a〉 〈b〉+ 〈b, a * b〉 and the right-hand side represents 〈a, b〉. In the right diagram, the left-hand side represents the chain −〈a〉 〈b〉 – 〈b, a * b〉 and the right-hand side represents –〈a, b〉. Thus the above equality is needed for colored diagrams to define equivalent chains in the quotient complex. A geometric interpretation of the last expression of D3(X)Y omitting 〈y〉,
Figure 11.

Colors for Y-oriented R4 moves.
is found in Figure 12. The symbol 〈a〉 is represented by the horizontal 1-simplex, 〈b, c〉 is represented by the right triangular face, and 〈a〉 〈b, c〉 is represented by a prism. The term 〈a, b, c〉 corresponds to the right top tetrahedron in the prism. The expressions of the form 〈〈a〉 〈b, c〉〉i provides a triangulation of a product of simplices. Each term corresponds to
Figure 12.

Decomposition of a prism into tetrahedra.
Below we use the notation
Then the boundaries of 〈〈a〉 〈b, c〉〉i are computed as
and the right-hand sides for i = 1, 2, 3 are computed as follows:
where 〈(∂(i)〈a〉) 〈b, c〉〉1 is regarded as (∂(i) 〈a〉)〈b, c〉. The canceling terms of the form ∂(i) 〈〈a〉 〈b, c〉〉j in the above boundaries correspond to internal triangles in Figure 12 that are shared by a pair of tetrahedra. Other terms are of the form 〈∂(i) 〈a〉 〈b, c〉〉j or 〈〈a〉∂(i) 〈b, c〉〉j, and they are outer triangles that constitute the boundary of the prism. The expression 〈∂(i) 〈a〉 〈b, c〉〉j represents the two triangles on the right and the left in Figure 12, since this represents
Thus the outer boundary follows the pattern of Leibniz rule.
In terms of the coloring invariant of graphs, as in the case of the preceding relation for the Y-oriented R4 move, this relation corresponds to an equivalence of colored 2-complexes called foams, which are higher-dimensional analogues of the move depicted in Figure 11. See [Carter and Ishii 2012] for more on colored foams.
Lemma 14
For 〈a〉 = 〈a1,…, as〉 and 〈b〉 = 〈b1, …, bt 〉 where ai, bj ∈ Gλ, we have
where 〈〈·〉 〈 ·〉〉 is linearly extended.
Proof
By definition, we have
Direct computations show that
The terms of the form − ∂(i) 〈〈a〉 〈b〉〉i<sub>1</sub>,…,i<sub>k–1</sub>,i<sub>k</sub>+1,i<sub>k+1</sub>,…,i<sub>s</sub> (ik = i < i +1 < ik+1) and −∂(i) 〈〈a〉 〈b〉〉i<sub>1</sub>,…,i<sub>k</sub>,i<sub>k+1</sub>–1,i<sub>k+2</sub>,…,i<sub>s</sub> (ik < i < i +1 = ik+1) cancel in pairs. The other terms are organized as
where 〈·〉i<sub>1</sub>,…,i<sub>s</sub> is linearly extended.
Since the Leibniz rule holds (by the preceding Lemma 14), we have the following.
Lemma 15
D*(X)Y = (Dn(X)Y, ∂n) is a subcomplex of P*(X)Y.
8. Chain map for simplicial decomposition
In this section we examine relations between group and MCQ homology theories.
8.1. Simplicial decomposition (general case)
We observe an associativity of the notation 〈〈a〉 〈b〉〉 defined in Section 3, and extend the notation to multi-tuples. For an expression of the form 〈a〉 〈b〉 〈c〉 in a chain in P*(X)Y, where , it is easy to see that we have the following.
Lemma 16
By Lemma 16, we can define 〈〈a〉 〈b〉 〈c〉〉 by 〈〈〈a〉 〈b〉〉 〈c〉〉 = 〈〈a〉 〈〈b〉 〈c〉〉〉. Moreover, for an expression of the form 〈a1〉 ··· 〈ak〉 in a chain in P*(X)Y, where , we can define 〈〈a1〉 ··· 〈ak〉〉 inductively. By Lemma 14, this notation is compatible with the boundary homomorphism ∂ in the following sense.
Lemma 17
We give a direct formula (instead of induction) for the notation 〈〈a1〉 ··· 〈ak〉〉 later in Section 8.3.
8.2. Chain map (from MCQ to group)
Let X = ∐λ∈Λ Gλ be a multiple conjugation quandle, and let Y be an X-set. Let be the subgroup of Pn(X)Y generated by the elements of the form 〈y〉 〈a〉. Let and be respectively and , which are the subgroups of . Note that is the trivial group. We put
Then and are chain complexes. If X is a group (regarded as X =∐λ∈Λ Gλ with Λ a singleton) and Y is a singleton, is essentially the same as the chain complex of the usual group homology. For an abelian group A, we define the cochain complexes
When X is a multiple conjugation quandle consisting of a single group, define homomorphisms by
Then by Lemma 17 and from these definitions, we have the following.
Proposition 18
The homomorphisms give rise to a chain homomorphism. Furthermore, Δ induces the chain homomorphisms and .
When n = 0, 1, the induced homomorphisms and are identities. Furthermore and for n = 0, 1. We note that the chain homomorphisms Δ are defined only for an MCQ consisting of a single group. In this case, we also have the cochain homomorphisms and for an abelian group A. Hence, for a given cocycle of group homology theory, we can obtain that of our theory through Δ. This approach will be discussed in Section 10.
Remark 19
We point out here that for a group X = ℤ3 and a trivial X-set Y, there is a group 2-cocycle η that satisfies the conditions in (coming from ),
Specifically, let η : ℤ3 ×ℤ3→ℤ3 denote the function that has values η(1, 1) = 1, η(2, 2) = 2 and η(g, h) = 0 otherwise. It is a direct calculation that the condition above is satisfied. Furthermore, to see that η is a cocycle, consider the generating cocycle over G = ℤp where p is a prime that is defined by
where x̄ is an integer 0 ≤ x̄ < p such that x̄ = x (mod p). It is known that η0 is a generating 2-cocycle for for prime p. For p = 3, let ζ be a 1-chain defined by ζ(0) = 0 and ζ(1)+ζ(2) = 2. Then one can easily compute that η = η0 +δζ. Hence there is a 2-cocycle of our theory that is cohomologous to the standard group 2-cocycle η0.
8.3. Simplicial decomposition (direct formula)
We give a direct formula (instead of induction) for the notation 〈〈a1〉 ··· 〈ak〉〉. To the term 〈〈a〉 〈b〉〉i<sub>1</sub>,…,i<sub>s</sub>, we associate a vector v = (v1, …, vn) ∈ {1, 2}n by defining vi = 1 if i = ij for some j, and otherwise vi = 2, where n = s +t. In the term
the first entry with ak in it corresponds to vi = 1 and the second with bi–k to vi = 2. We note that the term ak came from the first part 〈a〉 in 〈〈a〉 〈b〉〉i<sub>1</sub>,…,i<sub>s</sub> so that vi = 1 is assigned, and the term bi–k belongs to the second part 〈b〉 receiving vi = 2.
Example 20
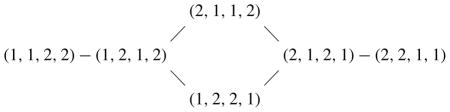
For the term 〈a〉 〈b, c〉 discussed for Figure 12, the terms 〈a, b, c〉, –〈b, a * b, c〉, and 〈b, c, a * (bc)〉 correspond to the vectors (1, 2, 2), (2, 1, 2), and (2, 2, 1), respectively. Note that (2, 1, 2) is obtained from (1, 2, 2) by a transposition of the first two entries, and this is reflected in Figure 12 by the fact that the tetrahedra represented by these vectors share a triangular internal face. We indicate by an edge between two vectors when one is obtained from the other by a transposition of consecutive entries. In this case we draw the graph:
For 〈a, b〉 〈c, d〉, the terms 〈〈a〉 〈b〉〉i<sub>1</sub>,…,i<sub>s</sub> are listed as 〈a, b, c, d〉, –〈a, c, b*c, d〉, 〈c, a*c, b*c, d〉, 〈a, c, d, b*(cd)〉, –〈c, a*c, d, b*(cd)〉, 〈c, d, a*(cd), b*(cd)〉, and these correspond to vectors
respectively. They are connected by edges as
indicating which simplices share internal faces. Note that from a vector v = (v1, …, vn) ∈ {1, 2}n the subscripts i1, …, is in 〈〈a〉 〈b〉〉i<sub>1</sub>,…,i<sub>s</sub> are recovered by the condition vi <sub>j</sub> = 1.
For an expression of the form 〈a1〉 ··· 〈ak〉 in a chain in P*(X)Y, where
we put n = |a1| + ··· + |ak| and consider vectors v = (v1, …, vn) ∈ {1, …, k}n, and denote by the number of j’s in v1, …, vi. Then for a given v define i( j, 1) < ··· < i( j, nj) by the condition that vi(j,1) =···=vi(j,n<sub>j</sub>) = j.
With these notations in hand, we temporarily define 〈〈a1〉 ··· 〈ak〉〉′ by
for 〈a1〉 ··· 〈ak〉 = 〈a1,1, …, a1,n<sub>1</sub>〉 ··· 〈ak,1, …, ak,n<sub>k</sub>〉, where
Then we have 〈〈a1〉 ··· 〈ak〉〉′ = 〈〈a1〉 ··· 〈ak〉〉, from the fact that simplices of both sides are in one-to-one correspondence with vectors v = (v1, …, vn) ∈ {1, …, k}n, and the signs correspond to the number of transpositions, modulo 2, of a given vector v from the vector (1, …, 1, 2, …, 2, …, k, …, k).
Example 21
The terms of 〈〈a〉 〈b, c〉 〈d〉〉 consist of
which, respectively, correspond to the vectors
The graph representing shared faces is depicted in Figure 13.
Figure 13.

Boundaries of 〈a〉 〈b, c〉 〈d〉.
9. Relationship between MCQ and IIJO
Let X = ∐λ∈Λ Gλ be a multiple conjugation quandle, and let Y be an X-set. Let be the subgroups of Pn(X)Y generated by the elements of the form 〈y〉 〈a1〉 ··· 〈an〉. Then is a subcomplex of P*(X)Y. Let be the subgroup of generated by the elements of the forms
for a1, …, an ∈ X and b1, b2 ∈ Gλ. We note that the former elements relate to the invariance under the R1 and R4 move, and that the latter elements relate to the invariance under the R5 move and reversing orientation.
Lemma 22
is a subcomplex of .
Proof
This follows from
for b1, b2 ∈ Gλ.
We put
Then is a chain complex. If X is obtained from a G-family of quandles as in Example 2, is the chain complex defined in [Ishii et al. 2013]. For an abelian group A, we define the cochain complexes
We note that a natural projection does not induce a chain homomorphism , since IIJO homology theory is invariant under the invariance for reversing orientations. (See Table 1.) It is seen, however, that this map induces the chain homomorphism and the cochain homomorphism for an abelian group A. Hence, for a given cocycle of IIJO homology theory (with some modification for a multiple conjugation quandle as above), we can obtain that of our theory through pr*. This implies that our invariant is a generalization of the IIJO quandle cocycle invariant.
Table 1.
Comparison between IIJO theory and MCQ theory
| IIJO | 2-boundary | degenerate | cancelled by sign | zero by definition |
|---|---|---|---|---|
| moves | R3 | R4(⇝ R1), R5(⇝ ori.) | R2 | R6 |
| MCQ | 2-boundary | degenerate D2(X)Y | degenerate | cancelled by sign |
|---|---|---|---|---|
| moves | R3, R5, R6 | R4(⇝ R1) | orientation | R2 |
10. Towards finding 2-cocycles
We discuss approaches to finding 2-cocycles that are not induced from the IIJO (co)homology theory. Let G be a group, M a right G-module, and A an abelian group. The module M and the set X = M×G (= ∐x∈M{x}×G) can be considered as a G-family of quandles and a multiple conjugation quandle as in Example 2, respectively.
We take an X-set Y as a singleton {y0} and suppress the notation 〈y0〉. For a 2-cocycle ψ ∈ P2(X; A)Y, we denote ψ(〈(x, g)〉 〈(y, h)〉) by ϕ((x, g), (y, h)), and ψ(〈(x, g), (x, h)〉) by ηx(g, h). Then the 2-cocycle conditions are written as
ηx (g, h)+ηx (gh, k) = ηx (h, k)+ηx (g, hk),
ϕ((x, g), (y, k))+ϕ((x, h), (y, k))−ϕ((x, gh), (y, k)) = ηx (g, h)−ηx*<sup>k</sup>y(g * k, h * k),
ϕ((x, g), (y, h))+ϕ((x *h y, g * h), (y, k)) = ϕ((x, g), (y, hk)),
-
ϕ((x, g), (y, h))+ϕ((x *h y, g * h), (z, k)) = ϕ((x, g), (z, k))+ϕ((x *k z, g * k), (y *k z, h * k)),
where x, y, z ∈ M and g, h, k ∈ G. Furthermore, for a 2-cochain ψ ∈ P2(X; A)Y, the condition that ψ is a 2-cochain in C2(X; A)Y is written as
-
ϕ((x, g), (x, h)) = ηx (g, h) − ηx (h, g * h),
where x ∈ M and g, h ∈ G.
Towards constructing MCQ 2-cocycles that are not from the IIJO homology, first we note that if ϕ above is an IIJO 2-cocycle, then ϕ satisfies the conditions (3),(4), and the condition that the LHS of (2) vanishes. By considering ψ′ = ψ − ϕ, we obtain an MCQ 2-cocycle ψ′ that consists only of terms of ηx for x ∈ M. Thus we first consider such a case in Example 23 below. In this case, we can take an approach described in Section 8 for finding MCQ cocycles from group cocycles.
Example 23
For a 2-cochain ψ ∈ P2(X; A)Y with the assumption
-
(0)
ψ(〈(x, g)〉 〈(y, h)〉) (= ϕ((x, g), (y, h))) = 0,
we discuss what conditions are needed for the 2-cochain ψ being a 2-cocycle in P2(X; A)Y. When we use the notation ηx (g, h) for ψ(〈 (x, g), (x, h) 〉), the 2-cocycle conditions are written as
-
(1)
ηx (g, h)+ηx (gh, k) = ηx (h, k)+ηx (g, hk),
-
(2′)
ηx (g, h)−ηx*<sup>k</sup>y(g * k, h * k) = 0,
where x, y ∈ M and g, h, k ∈ G. We note that the condition (0) implies (3) and (4). Furthermore, for a 2-cochain ψ ∈ P2(X; A)Y with the assumption (0), the condition that ψ is a 2-cochain in C2(X; A)Y are written as
-
(5′)
ηx (g, h)−ηx (h, g * h) = 0,
where x ∈ M and g, h ∈ G. Hence if ψ satisfies (0),(1), (2′) and (5′), then ψ is a 2-cocycle in C2(X; A)Y and defines an invariant for handlebody-knots.
If y = x, then (2′) implies ηx (g *k, h *k) = ηx (g, h), called the right invariance of ηx. If x = 0, then (2′) with right invariance implies ηy·(1−k) ≡ η0, which is another necessary condition for the condition (2′). Hence if any element in M can be represented by the form y · (1 − k) for some y ∈ M and k ∈ G, then we have ηx ≡ η0 for any x ∈ M. In this case, we can check that the 2-cocycle ψ in C2(X; A)Y comes from the dual of the composition of the chain homomorphisms
where a chain homomorphism pr2 is induced from a natural projection into the second factor and the chain homomorphism Δ was defined in Section 8.2. In this case, ψ assigned at a crossing is decomposed into a pair of weights η corresponding to trivalent vertices as depicted in Figure 10 (B) and (C). Hence the resulting invariant is equivalent to the invariant of the trivalent graph obtained by replacing all crossings with vertices, that is, embedded in the 2-sphere without crossing. Such an embedded graph is equivalent to a circle with small bubbles, and has trivial invariant value (W(D;C) = 0 for any coloring C). Thus, in this case, ψ defines a trivial invariant for handlebody-knots by the group 2-cocycle η0, whose cohomology class may not be zero in .
If the condition that any element in M can be represented by the form y · (1−k) for some y ∈ M and k ∈ G is not satisfied, then ψ satisfying (0), (1), (2′) and (5′) may give rise to a nontrivial invariant for handlebody-links.
Example 24
In contrast to Example 23, next we consider the case when ϕ is not an IIJO 2-cocycle, so that the LHS of (2) does not vanish for ϕ.
For any G-invariant A-bilinear map f: M2→ A, Theorem 5.2 of [Nosaka 2013] claimed that the map ϕf: X2→ A defined by
satisfies the conditions (3) and (4) above. For the G-invariant A-bilinear map f, if we can find maps ηx such that the conditions (1) and (2) are also satisfied, then we obtain a 2-cocycle, which may be new. We remark here that ϕf itself can be modified as in [Nosaka 2013, Corollary 4.7] (by using an additive homomorphism form G to some commutative ring) so that the conditions (1) and (2) are also satisfied under the assumption ηx ≡ 0 for any x ∈ M.
The condition (1) merely says that ηx is a usual group 2-cocycle for any x ∈ M. The condition (2) is equivalent to
-
(2″)
f (x − y, y · (1−k−1)) = ηx (g, h) − ηx*<sup>k</sup> y(g * k, h * k)
from the definition of f. If y = x, then (2″) implies that ηx is right invariant in the sense that ηx (g * k, h * k) = ηx (g, h) as above. If y = 0, then (2″) with the right invariance implies ηx·k ≡ ηx, called the orbit dependence of ηx. Thus we obtain these two necessary conditions for the condition (2″).
We examine the following specific examples. For a prime number p, let G denote SL(2, ℤp) that acts on M =(ℤp)2 from the right. For A=ℤp, the map f: M2→A defined by is a G-invariant A-bilinear map, where x, y ∈ M are row vectors on which G acts on the right, and det denotes the determinant. This setting is motivated from [Nosaka 2013, Proposition 4.5].
First, we consider the case where p = 2. Define m: M → A by
Then we can check that
for any x, y ∈ M and g, h ∈G. Take ηx (g, h) to be m(x) for any x ∈ M and g, h ∈G. Then we can show that the 2-cochain ψ, defined by ϕf and ηx, is a 2-coboundary as follows. Define a 1-cochain m̃ ∈ P1(X; A) by m̃ (〈(x, g)〉):= m(x). Then the 2-coboundary δm̃ ∈ P2(X; A) is written as
where x, y ∈ M and g, h ∈ G. This implies that ψ = δm̃.
Second, we consider the case where p > 2. If x = (0, 0) and , the condition (2″) implies η2y(g, h)=η0(g, h) for any y ∈ M and g, h ∈ G. Since p is odd, we have that ηx ≡η0 for any x ∈ M. If we substitute y =(1, 0) and for (2″), then LHS is 1 and RHS is 0, which turns out to be a contradiction. Hence there is no choice of ηx such that the conditions (1) and (2″) are satisfied.
Although our attempts have not resulted in new nontrivial 2-cocycles, it appears useful to record our approaches and facts we have found, for future endeavors towards constructing new cocycles using these approaches. Further studies are desirable on this homology theory, as it unifies group and quandle homology theories for a structure of multiple conjugation quandles, which have ample interesting examples and applications to handlebody-links.
Acknowledgments
Carter was partially supported by the Simons Foundation. Ishii was partially supported by JSPS KAKENHI Grant Number 24740037. Saito was partially supported by (U.S.) NIH R01GM109459. Tanaka was partially supported by JSPS KAKENHI Grant Number 26400082. The authors are grateful to Daniel Moskovich for valuable comments on exposition, and Yusuke Iijima for pointing out an error in an earlier version.
Footnotes
MSC2010: primary 57M15, 57M25, 57M27, 57Q45; secondary 55N99, 18G99.
Contributor Information
Scott Carter, Email: carter@southalabama.edu, Department of Mathematics and Statistics, University of South Alabama, ILB 325, Mobile, AL 36688, United States.
Atsushi Ishii, Email: aishii@math.tsukuba.ac.jp, Institute of Mathematics, University of Tsukuba, 1-1-1 Tennodai, Ibaraki, Tsukuba 305-8571, Japan.
Masahico Saito, Email: saito@usf.edu, Department of Mathematics and Statistics, University of South Florida, 4202 E Fowler Ave., PHY 114, Tampa, FL 33620, United States.
Kokoro Tanaka, Email: kotanaka@u-gakugei.ac.jp, Department of Mathematics, Tokyo Gakugei University, 4-1-1 Nukuikita-machi, Koganei-shi, Tokyo 184-8501, Japan.
References
- [Brieskorn 1988].Brieskorn E. Braids. Santa Cruz, CA: 1986. Automorphic sets and braids and singularities; pp. 45–115. Contemp. Math. 78, Amer. Math. Soc., Providence, RI, 1988. MR Zbl. [Google Scholar]
- [Carter and Ishii 2012].Carter JS, Ishii A. A knotted 2-dimensional foam with non-trivial cocycle invariant. 2012 preprint. arXiv. [Google Scholar]
- [Carter et al. 2001].Carter JS, Kamada S, Saito M. Geometric interpretations of quandle homology. J Knot Theory Ramifications. 2001;10(3):345–386. MR Zbl. [Google Scholar]
- [Carter et al. 2003].Carter JS, Jelsovsky D, Kamada S, Langford L, Saito M. Quandle cohomology and state-sum invariants of knotted curves and surfaces. Trans Amer Math Soc. 2003;355(10):3947–3989. MR Zbl. [Google Scholar]
- [Fenn and Rourke 1992].Fenn R, Rourke C. Racks and links in codimension two. J Knot Theory Ramifications. 1992;1(4):343–406. MR Zbl. [Google Scholar]
- [Fenn et al. 1995].Fenn R, Rourke C, Sanderson B. Trunks and classifying spaces. Appl Categ Structures. 1995;3(4):321–356. MR Zbl. [Google Scholar]
- [Ishii 2008].Ishii A. Moves and invariants for knotted handlebodies. Algebr Geom Topol. 2008;8(3):1403–1418. MR Zbl. [Google Scholar]
- [Ishii 2015a].Ishii A. The Markov theorems for spatial graphs and handlebody-knots with Y-orientations. Internat J Math. 2015;26(14):1550116, 23. MR Zbl. [Google Scholar]
- [Ishii 2015b].Ishii A. A multiple conjugation quandle and handlebody-knots. Topology Appl. 2015;196(part B):492–500. MR Zbl. [Google Scholar]
- [Ishii and Iwakiri 2012].Ishii A, Iwakiri M. Quandle cocycle invariants for spatial graphs and knotted handlebodies. Canad J Math. 2012;64(1):102–122. MR Zbl. [Google Scholar]
- [Ishii et al. 2013].Ishii A, Iwakiri M, Jang Y, Oshiro K. A G-family of quandles and handlebody-knots. Illinois J Math. 2013;57(3):817–838. MR Zbl. [Google Scholar]
- [Joyce 1982].Joyce D. A classifying invariant of knots, the knot quandle. J Pure Appl Algebra. 1982;23(1):37–65. MR Zbl. [Google Scholar]
- [Kamada 2007].Kamada S. Intelligence of low dimensional topology 2006. World Scientific; Hackensack, NJ: 2007. Quandles with good involutions, their homologies and knot invariants; pp. 101–108. Ser. Knots Everything 40. MR Zbl. [Google Scholar]
- [Kamada and Oshiro 2010].Kamada S, Oshiro K. Homology groups of symmetric quandles and cocycle invariants of links and surface-links. Trans Amer Math Soc. 2010;362(10):5501–5527. MR Zbl. [Google Scholar]
- [Matveev 1982].Matveev SV. Distributive groupoids in knot theory. Mat Sb (NS) 1982;119(1):78–88. In Russian; translated in Math. USSR Sb. 47:1 (1984), 73–83. MR Zbl. [Google Scholar]
- [Nosaka 2013].Nosaka T. Quandle cocycles from invariant theory. Adv Math. 2013;245:423–438. MR Zbl. [Google Scholar]
- [Przytycki 2011].Przytycki JH. Distributivity versus associativity in the homology theory of algebraic structures. Demonstratio Math. 2011;44(4):823–869. MR Zbl. [Google Scholar]
- [Takasaki 1943].Takasaki M. Abstraction of symmetric transformations. Tôhoku Math J. 1943;49:145–207. In Japanese. MR. [Google Scholar]