

Correction to: Scientific Reports 10.1038/s41598-021-84878-3, published online 04 March 2021
The original version of this Article contained an error in the order of the Figures. Figure 4 was published as Figure 7, Figure 6 was published as Figure 4, and Figure 7 was published as Figure 6. The Figure legends were correct.
The original Figures 4, 6 and 7 and accompanying legends appear below.
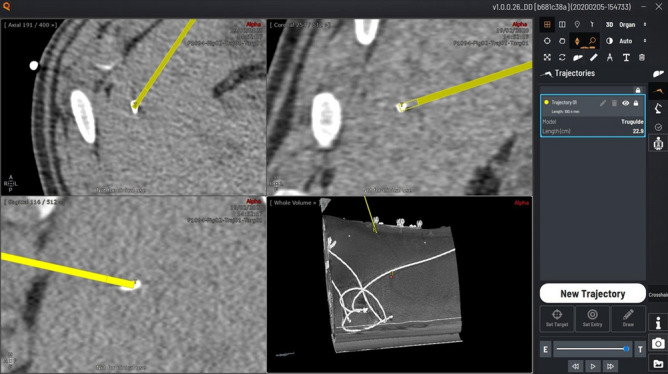
Figure 4.

Screenshot of the planning software (home-made software). The needle trajectory (in yellow) is planned by defining the entry (skin) and the target points.
Figure 6.

Axial and coronal maximum intensity projection CT images showing the placement of fiducials in a swine live.
Figure 7.
Definition of orbital and cranio-caudal angulations.
The original Article has been corrected.